
Indoor Traveling Salesman Problem (ITSP) Path Planning



_Lee.png)

Abstract
:1. Introduction
2. Related Work
3. Indoor Traveling Salesman Problem (ITSP)
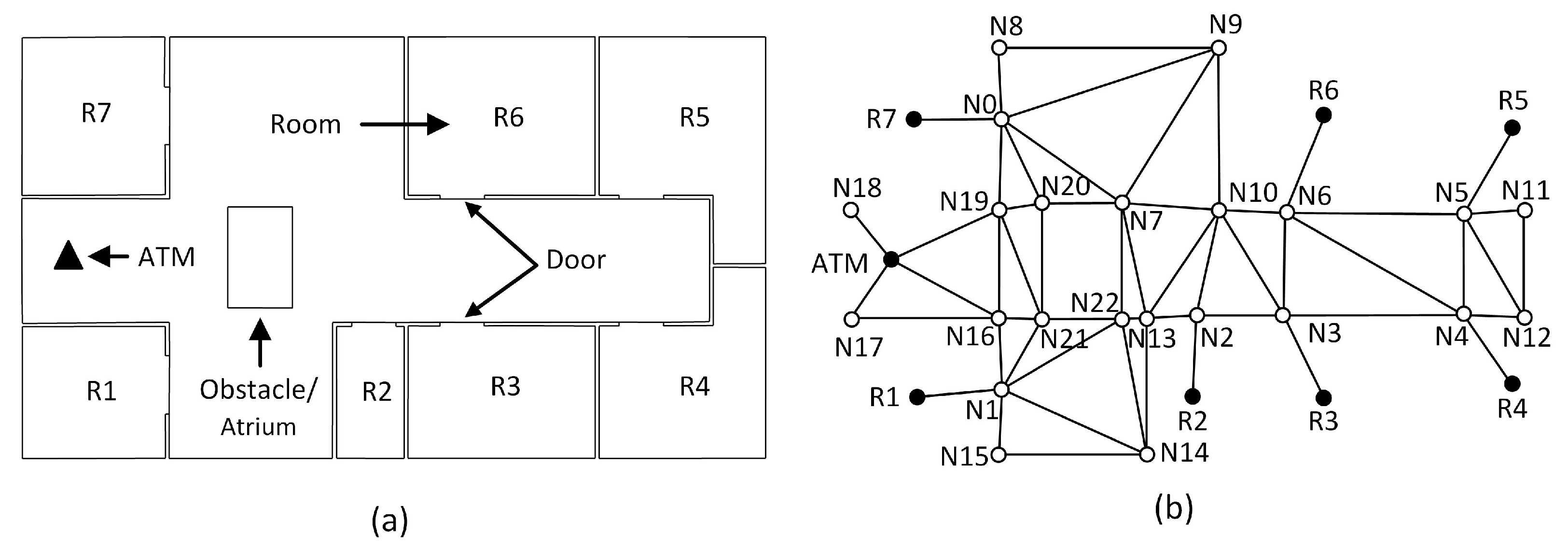
3.1. Concepts and Modeling
3.2. Procedures of ITSP Path Planning
- Step 1: Select intermediate destinations (nodes).Select departure location () and specified intermediate places (). For instance, the and .
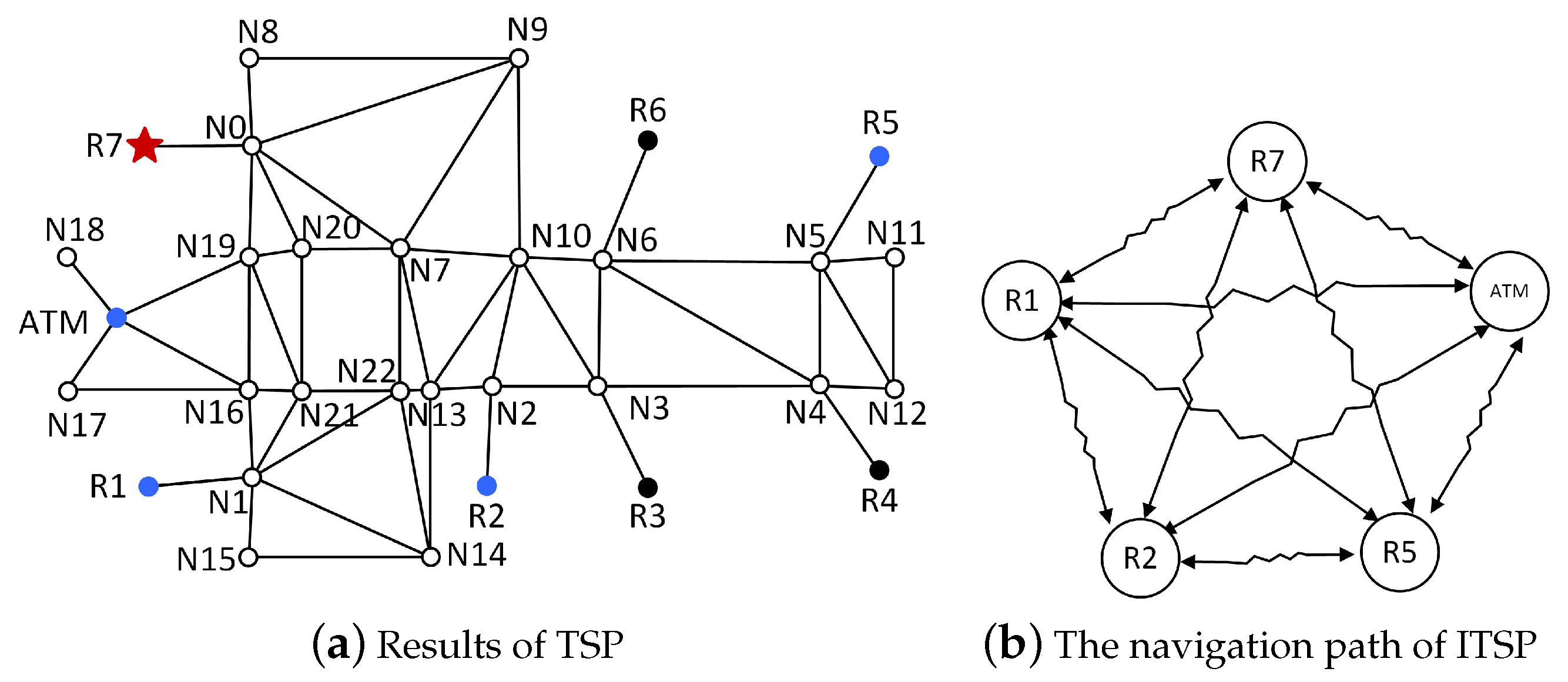
- Step 2: Compute navigation paths between every two selected nodes.This step takes the departure location and specified intermediate places as nodes to compute navigation paths between any two nodes based on Dijkstra. The lengths of the navigation paths are used as the distances between two nodes. In this paper, we set the , i.e., the paths in this example are symmetric and we simply assume the route between the two intermediate destinations is bi-directional. In reality, may be not equal to , e.g., one-way corridors such as escalators. In all cases, . Continue the example in Step 1, this step can get six paths: , , , , , , and corresponding reverse paths. The symbol (⇝) means there are zero to several navigation nodes between two nodes. The travel distances are , , , , , .
- Step 3: Set up graph of desired intermediate destinations.Setting up a graph of all desired intermediate destinations is to take the travel distances of every two specified places as weights and all these places as nodes to make an undirected graph. For the example in Step 1, the undirected graph can be organized as a table (Table 1).
- Step 4: Select and sort the navigation paths based on B&B algorithm.Taking the undirected graph as the input, the orders of departure and desired intermediate destinations can be computed based on the B&B algorithm. Then, the orders are further used to select and sort navigation paths. For instance, the order could be <>, which means the following navigation paths will selected and sorted as , , , and .
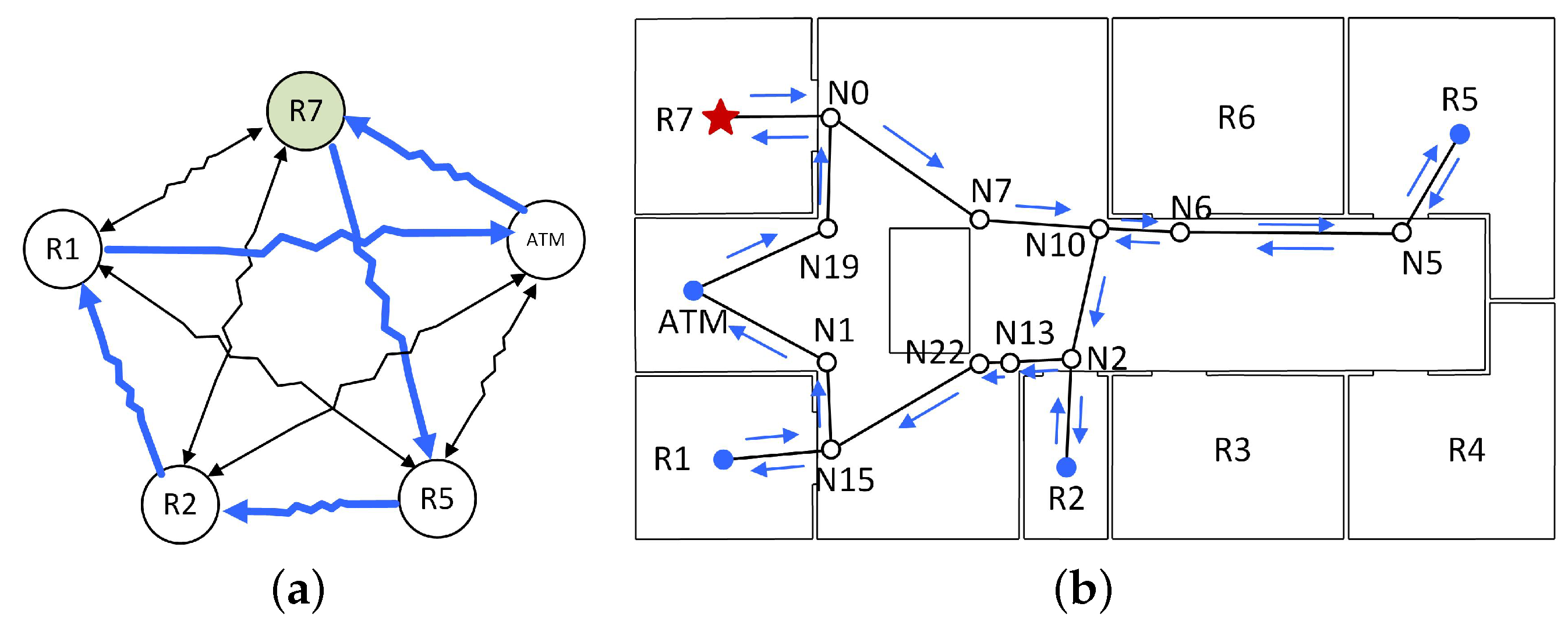
- Step 5: Combine the navigation results of Dijkstra as the ITSP path.The last step is to combine the navigation results as the ITSP path. For instance, the ITSP path of the example is . Then, the final navigation path becomes . The symbol (→) means there is no other navigation node between the two nodes.
3.3. Illustration
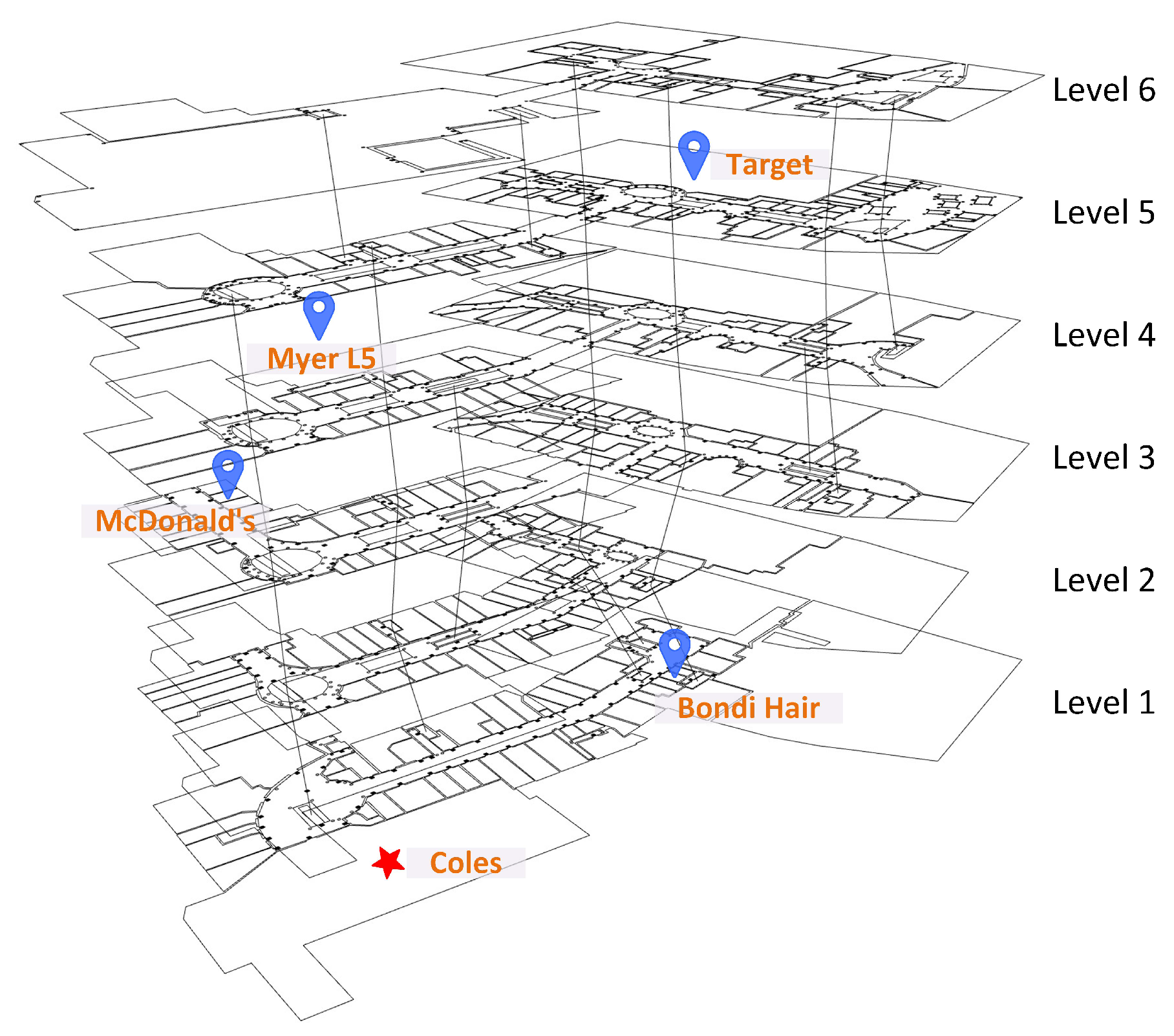
4. Implementation and Case Study
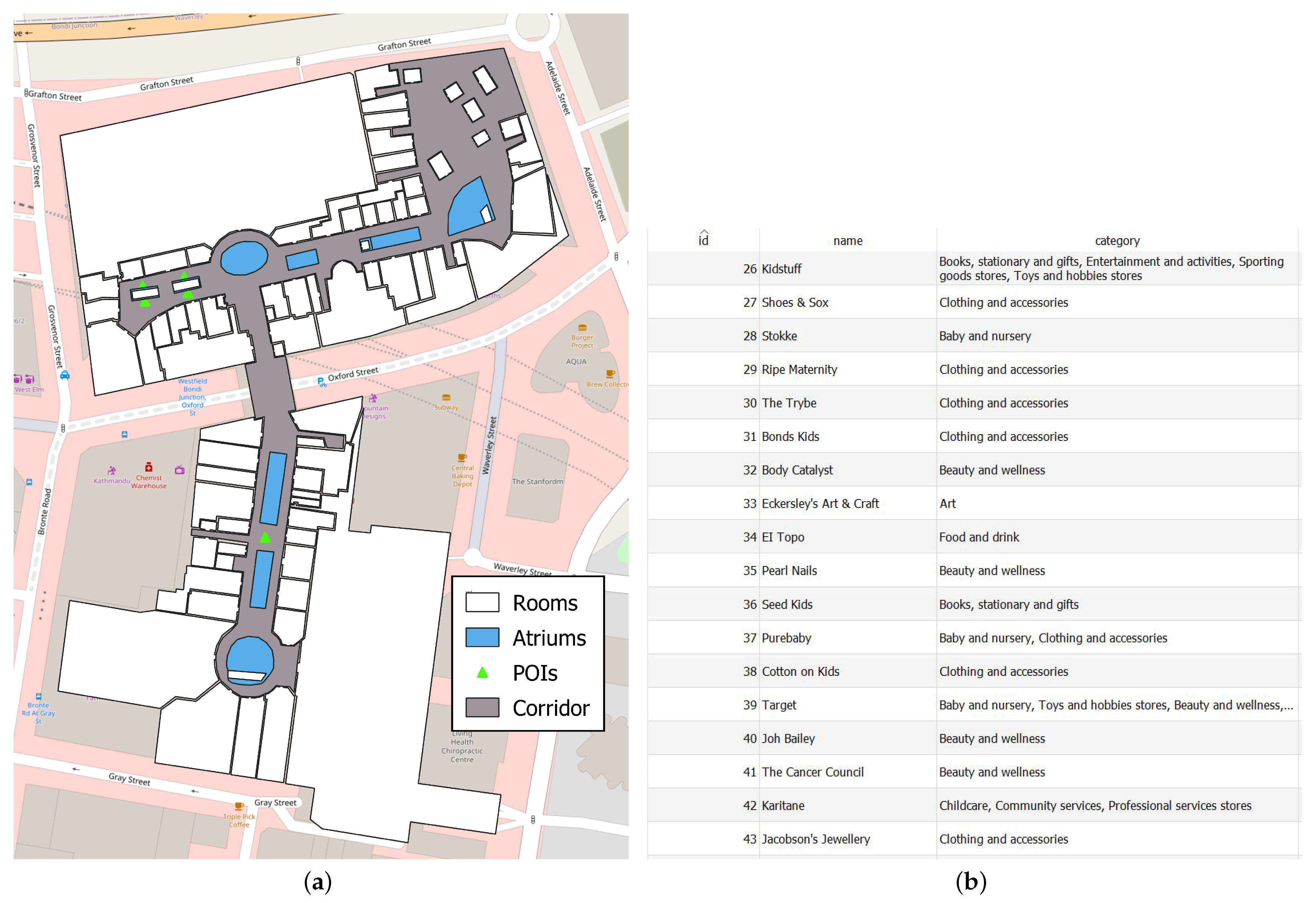
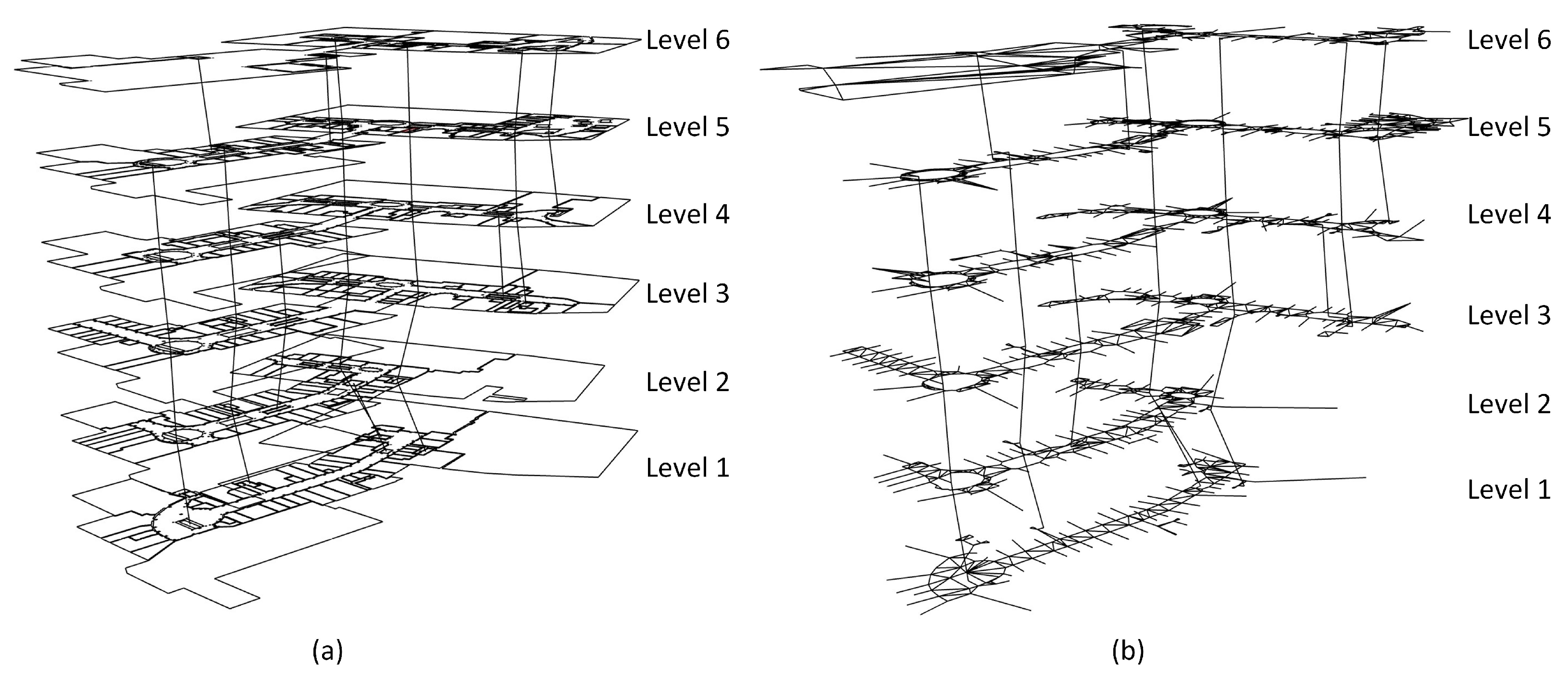
4.1. Case Description and Data Preparation
4.2. Navigation Network Derivation
4.3. ITSP Path Planning
4.4. Discussion
5. Conclusions and Future Work
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Jayakanth, K.; AbdelGhani, K.; Somaya, A.; Abdulla, A. Indoor positioning and wayfinding systems: A survey. Hum.-Centric Comput. Inf. Sci. 2020, 10, 18. [Google Scholar]
- Yan, J.; Diakité, A.A.; Zlatanova, S.; Aleksandrov, M. Top-Bounded Spaces Formed by the Built Environment for Navigation Systems. ISPRS Int. J. Geo-Inf. 2019, 8, 224. [Google Scholar] [CrossRef] [Green Version]
- Ambareesh, S.; Tejashwini, D.; Deeksha, R.S.; Sangeetha, S. Navigation for Indoor Location Based On QR Codes and Google Maps—A Survey. Int. J. Innov. Res. Inf. Secur. 2017, 4, 43–48. [Google Scholar]
- Fallah, N.; Apostolopoulos, I.; Bekris, K.E.; Folmer, E. Indoor Human Navigation Systems: A Survey. Interact. Comput. 2013, 25, 21–33. [Google Scholar]
- Dudas, P.M.; Ghafourian, M.; Karimi, H.A. ONALIN: Ontology and algorithm for indoor routing. In Proceedings of the 2009 Tenth International Conference on Mobile Data Management: Systems, Services and Middleware, Taipei, Taiwan, 18–20 May 2009; pp. 720–725. [Google Scholar]
- Ghafourian, M.; Karimi, H.A. CAD/GIS Integration Issues for Seamless Navigation between Indoor and Outdoor Environments. In CAD and GIS Integration; Auerbach Publications: Boca Raton, FL, USA, 2009; pp. 141–154. [Google Scholar]
- Golledge, R.G. Path selection and route preference in human navigation: A progress report. In International Conference on Spatial Information Theory; Springer: Berlin/Heidelberg, Germany, 1995; pp. 207–222. [Google Scholar]
- Bellmore, M.; Nemhauser, G.L. The traveling salesman problem: A survey. Oper. Res. 1968, 16, 538–558. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Pasiliao, E.L.; Pardalos, P.M.; Pitsoulis, L.S. Branch and bound algorithms for the multidimensional assignment problem. Optim. Methods Softw. 2005, 20, 127–143. [Google Scholar] [CrossRef]
- Morrison, D.R.; Jacobson, S.H.; Sauppe, J.J.; Sewell, E.C. Branch-and-bound algorithms: A survey of recent advances in searching, branching, and pruning. Discret. Optim. 2016, 19, 79–102. [Google Scholar] [CrossRef]
- Nandini, D.; Seeja, K. A novel path planning algorithm for visually impaired people. J. King Saud Univ.-Comput. Inf. Sci. 2019, 31, 385–391. [Google Scholar] [CrossRef]
- Duckham, M.; Kulik, L. “Simplest” paths: Automated route selection for navigation. In International Conference on Spatial Information Theory; Springer: Berlin/Heidelberg, Germany, 2003; pp. 169–185. [Google Scholar]
- Liu, L.; Zlatanova, S. A two-level path-finding strategy for indoor navigation. In Intelligent Systems for Crisis Management; Springer: Berlin/Heidelberg, Germany, 2013; pp. 31–42. [Google Scholar]
- Andreev, S.; Dibbelt, J.; Nöllenburg, M.; Pajor, T.; Wagner, D. Towards Realistic Pedestrian Route Planning. In Proceedings of the 15th Workshop on Algorithmic Approaches for Transportation Modelling, Optimization, and Systems (ATMOS 2015), Patras, Greece, 17 September 2015; Schloss Dagstuhl-Leibniz-Zentrum fuer Informatik: Wadden, Germany, 2015. [Google Scholar]
- Balata, J.; Berka, J.; Mikovec, Z. Indoor-Outdoor Intermodal Sidewalk-Based Navigation Instructions for Pedestrians with Visual Impairments. In International Conference on Computers Helping People with Special Needs; Springer: Berlin/Heidelberg, Germany, 2018; pp. 292–301. [Google Scholar]
- Cambra, P.J.; Gonçalves, A.; Moura, F. The digital pedestrian network in complex urban contexts: A primer discussion on typological specifications. Finisterra 2019, 54, 155–170. [Google Scholar]
- Wang, Z.; Zlatanova, S. Safe Route Determination for First Responders in the Presence of Moving Obstacles. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1044–1053. [Google Scholar] [CrossRef]
- Sharker, M.H.; Karimi, H.A.; Zgibor, J.C. Health-optimal routing in pedestrian navigation services. In Proceedings of the First ACM SIGSPATIAL International Workshop on Use of GIS in Public Health, Redondo Beach, CA, USA, 6 November 2012; ACM: New York, NY, USA, 2012; pp. 1–10. [Google Scholar]
- Alam, M.; Perugu, H.; McNabola, A. A comparison of route-choice navigation across air pollution exposure, CO2 emission and traditional travel cost factors. Transp. Res. Part D Transp. Environ. 2018, 65, 82–100. [Google Scholar] [CrossRef]
- Fang, Z.; Li, L.; Li, B.; Zhu, J.; Li, Q.; Xiong, S. An artificial bee colony-based multi-objective route planning algorithm for use in pedestrian navigation at night. Int. J. Geogr. Inf. Sci. 2017, 31, 2020–2044. [Google Scholar] [CrossRef]
- Yan, J.; Zlatanova, S.; Diakite, A.A. Two new pedestrian navigation path options based on semi-indoor space. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, VI-4/W1-2020, 175–182. [Google Scholar]
- Kimmel, R.; Amir, A.; Bruckstein, A.M. Finding shortest paths on surfaces using level sets propagation. IEEE Trans. Pattern Anal. Mach. Intell. 1995, 17, 635–640. [Google Scholar] [CrossRef]
- Karimi, H.A.; Jiang, M.; Zhu, R. Pedestrian navigation services: Challenges and current trends. Geomatica 2013, 67, 259–271. [Google Scholar] [CrossRef]
- Millonig, A.; Schechtner, K. Developing landmark-based pedestrian-navigation systems. IEEE Trans. Intell. Transp. Syst. 2007, 8, 43–49. [Google Scholar] [CrossRef]
- Zar, M.T.; Sein, M.M. Finding shortest path and transit nodes in public transportation system. In Genetic and Evolutionary Computing; Springer: Berlin/Heidelberg, Germany, 2016; pp. 339–348. [Google Scholar]
- Howard, C.; Burns, E.K. Cycling to work in Phoenix: Route choice, travel behavior, and commuter characteristics. Transp. Res. Rec. 2001, 1773, 39–46. [Google Scholar] [CrossRef]
- Zeng, W.; Church, R.L. Finding shortest paths on real road networks: The case for A. Int. J. Geogr. Inf. Sci. 2009, 23, 531–543. [Google Scholar] [CrossRef]
- Kolavali, S.R.; Bhatnagar, S. Ant colony optimization algorithms for shortest path problems. In International Conference on Network Control and Optimization; Springer: Berlin/Heidelberg, Germany, 2008; pp. 37–44. [Google Scholar]
- Jünger, M.; Reinelt, G.; Rinaldi, G. The traveling salesman problem. Handb. Oper. Res. Manag. Sci. 1995, 7, 225–330. [Google Scholar]
- Hoffman, K.L.; Padberg, M.; Rinaldi, G. Traveling salesman problem. Encycl. Oper. Res. Manag. Sci. 2013, 1, 1573–1578. [Google Scholar]
- López-Ibáñez, M.; Blum, C.; Ohlmann, J.W.; Thomas, B.W. The travelling salesman problem with time windows: Adapting algorithms from travel-time to makespan optimization. Appl. Soft Comput. 2013, 13, 3806–3815. [Google Scholar] [CrossRef] [Green Version]
- Montero, A.; Méndez-Díaz, I.; Miranda-Bront, J.J. An integer programming approach for the time-dependent traveling salesman problem with time windows. Comput. Oper. Res. 2017, 88, 280–289. [Google Scholar] [CrossRef]
- Öncan, T.; Altınel, I.K.; Laporte, G. A comparative analysis of several asymmetric traveling salesman problem formulations. Comput. Oper. Res. 2009, 36, 637–654. [Google Scholar] [CrossRef]
- Bektas, T. The multiple traveling salesman problem: An overview of formulations and solution procedures. Omega 2006, 34, 209–219. [Google Scholar] [CrossRef]
- Kitjacharoenchai, P.; Ventresca, M.; Moshref-Javadi, M.; Lee, S.; Tanchoco, J.M.; Brunese, P.A. Multiple traveling salesman problem with drones: Mathematical model and heuristic approach. Comput. Ind. Eng. 2019, 129, 14–30. [Google Scholar] [CrossRef]
- Salman, R.; Ekstedt, F.; Damaschke, P. Branch-and-bound for the precedence constrained Generalized Traveling Salesman Problem. Oper. Res. Lett. 2020, 48, 163–166. [Google Scholar] [CrossRef]
- Werner, M. Selection and ordering of points-of-interest in large-scale indoor navigation systems. In Proceedings of the 2011 IEEE 35th Annual Computer Software and Applications Conference, Munich, Germany, 18–22 July 2011; pp. 504–509. [Google Scholar]
- Munkres, J.R. Elements of Algebraic Topology; Addison-Wesley Menlo Park: Menlo Park, CA, USA, 1984; Volume 2. [Google Scholar]
- Yan, J.; Zlatanova, S.; Diakité, A. A unified 3D space-based navigation model for seamless navigation in indoor and outdoor. Int. J. Digit. Earth 2021, 14, 985–1003. [Google Scholar] [CrossRef]
- Idrees, A.; Iqbal, Z.; Ishfaq, M. An efficient indoor navigation technique to find optimal route for blinds using QR codes. In Proceedings of the 2015 IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015; pp. 690–695. [Google Scholar]
- Watson, D.F. Computing the n-dimensional Delaunay tessellation with application to Voronoi polytopes. Comput. J. 1981, 24, 167–172. [Google Scholar] [CrossRef] [Green Version]
- Xie, D.; Zhu, H.; Yan, L.; Yuan, S.; Zhang, J. An improved Dijkstra algorithm in GIS application. In Proceedings of the World Automation Congress 2012, Puerto Vallarta, Mexico, 24–28 June 2012; pp. 167–169. [Google Scholar]
- Yan, J.; Diakité, A.A.; Zlatanova, S. A generic space definition framework to support seamless indoor/outdoor navigation systems. Trans. GIS 2019, 23, 1273–1295. [Google Scholar] [CrossRef]
- Roth, J. Efficient many-to-many path planning and the Traveling Salesman Problem on road networks. Int. J. Knowl.-Based Intell. Eng. Syst. 2016, 20, 135–148. [Google Scholar] [CrossRef]
- Boryczka, U.; Szwarc, K. The harmony search algorithm with additional improvement of harmony memory for asymmetric traveling salesman problem. Expert Syst. Appl. 2019, 122, 43–53. [Google Scholar] [CrossRef]
- Anily, S.; Bramel, J. Approximation algorithms for the capacitated traveling salesman problem with pickups and deliveries. Nav. Res. Logist. 1999, 46, 654–670. [Google Scholar] [CrossRef]
- Monnot, J.; Paschos, V.T.; Toulouse, S. Approximation algorithms for the traveling salesman problem. Math. Methods Oper. Res. 2003, 56, 387–405. [Google Scholar] [CrossRef] [Green Version]
- Alipour, M.M.; Razavi, S.N.; Derakhshi, M.R.F.; Balafar, M.A. A hybrid algorithm using a genetic algorithm and multiagent reinforcement learning heuristic to solve the traveling salesman problem. Neural Comput. Appl. 2018, 30, 2935–2951. [Google Scholar] [CrossRef]
- Choong, S.S.; Wong, L.P.; Lim, C.P. An artificial bee colony algorithm with a modified choice function for the traveling salesman problem. Swarm Evol. Comput. 2019, 44, 622–635. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0 | ||||
| 0 | ||||
| 0 | ||||
| 0 |
| Start | End | Path | Distance |
|---|---|---|---|
| R7 | R1 | R7 → N0 → N19 → N16 → N1 → R1 | 12.19 |
| R7 | R2 | R7 → N0 → N7 → N13 → N2 → R2 | 13.24 |
| R7 | R5 | R7 → N0 → N7 → N10 → N6 → N5 → R5 | 18.43 |
| R7 | ATM | R7 → N0 → N19 → ATM | 8.19 |
| R1 | R2 | R1 → N1 → N22 → N13 → N2 → R2 | 10.45 |
| R1 | R5 | R1 → N1 → N22 → N13 → N10 → N6 → N5 → R5 | 19.81 |
| R1 | ATM | R1 → N1 → N16 → ATM | 7.70 |
| R2 | R5 | R2 → N2 → N10 → N6 → N5 → R5 | 14.50 |
| R2 | ATM | R2 → N2 → N13 → N22 → N21 → N16 → ATM | 11.04 |
| R5 | ATM | R5 → N5 → N6 → N10 → N7 → N20 → N19 → ATM | 18.73 |
| R7 | R1 | R2 | R5 | ATM | |
|---|---|---|---|---|---|
| R7 | 0 | 12.19 | 13.24 | 18.43 | 8.19 |
| R1 | 12.19 | 0 | 10.45 | 19.81 | 7.70 |
| R2 | 13.24 | 10.45 | 0 | 14.50 | 11.04 |
| R5 | 18.43 | 19.81 | 14.50 | 0 | 18.73 |
| ATM | 8.19 | 7.70 | 11.04 | 18.73 | 0 |
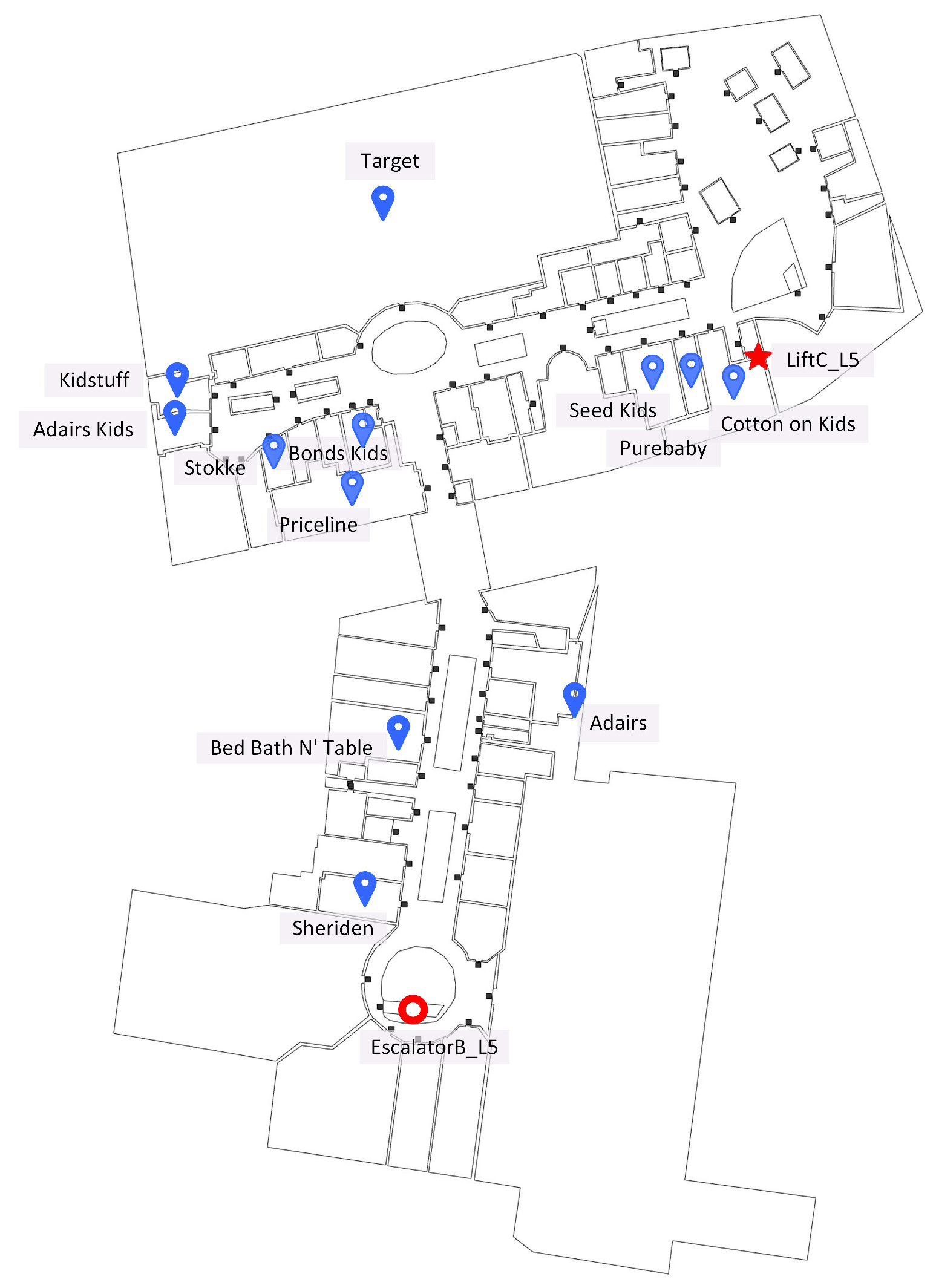
| Id | Name | Category |
|---|---|---|
| L5_6 | Sheriden | Baby and nursery, Clothing and accessories, Home |
| L5_16 | Adairs | Baby and nursery, Home |
| L5_21 | Bed Bath N’ Table | Clothing and accessories, Baby and nursery, Home |
| L5_22 | Priceline | Baby and nursery, Discount and variety, Health and fitness |
| L5_25 | Adairs Kids | Clothing and accessories, Home, Toys and hobbies stores |
| L5_26 | Kidstuff | Books, stationary and gifts, Entertainment and activities, Sporting goods stores, Toys and hobbies stores |
| L5_28 | Stokke | Baby and nursery |
| L5_31 | Bonds Kids | Clothing and accessories |
| L5_36 | Seed Kids | Books, stationary and gifts |
| L5_37 | Purebaby | Baby and nursery, Clothing and accessories |
| L5_38 | Cotton on Kids | Clothing and accessories |
| L5_39 | Target | Baby and nursery, Toys and hobbies stores |
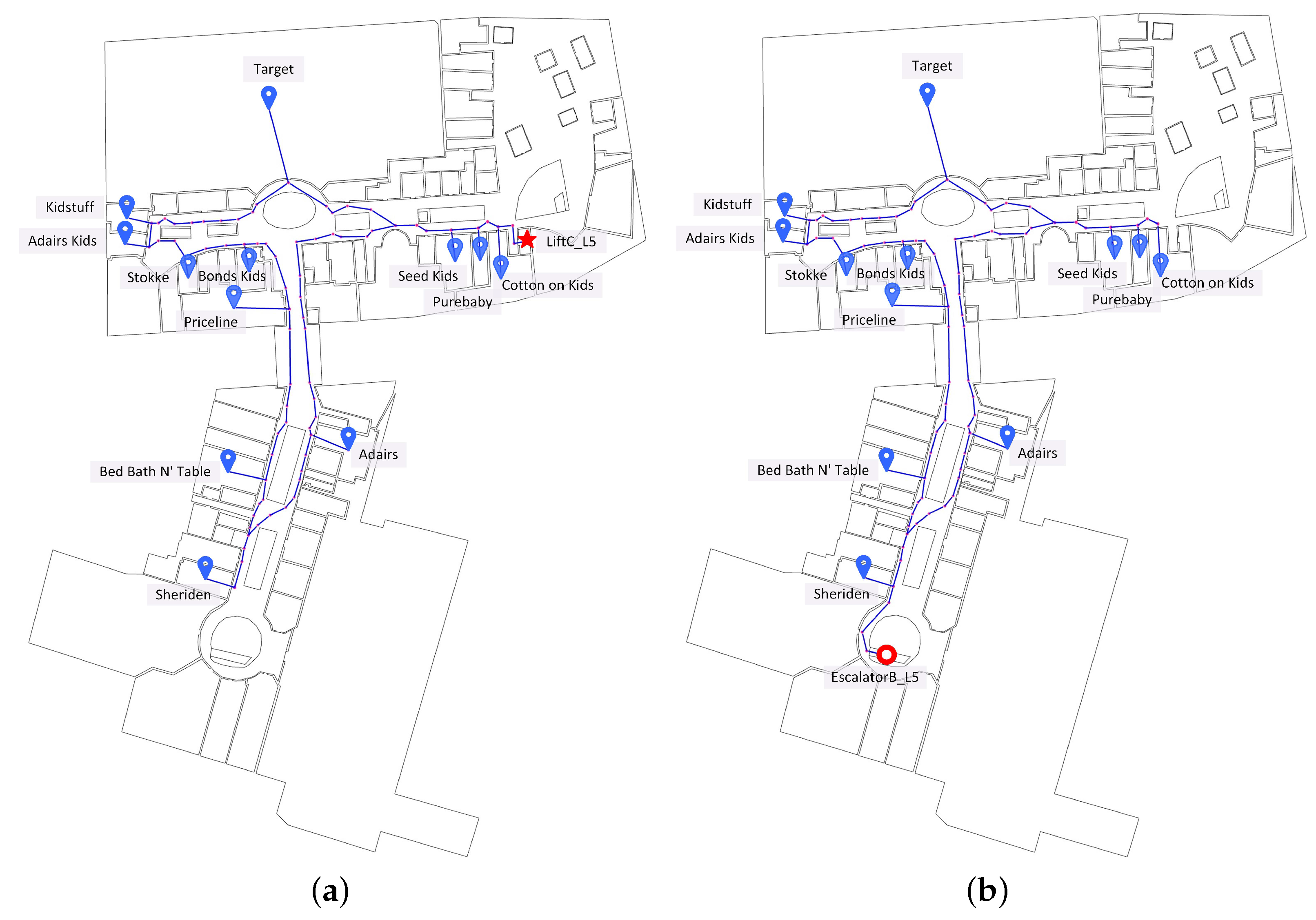
| Departure | TSP Results |
|---|---|
| LiftC_L5 | LiftC_L5 ⇝ Seed Kids ⇝ Target ⇝ Kidstuff ⇝ Adairs Kids ⇝ Stokke ⇝ Bonds Kids ⇝ Priceline ⇝ Bed Bath N’ Table ⇝ Sheriden ⇝ Adairs ⇝ Purebaby ⇝ Cotton on Kids ⇝ LiftC_L5 |
| EscalatorB_L5 | EscalatorB_L5 ⇝ Sheriden ⇝ Adairs ⇝ Seed Kids ⇝ Purebaby ⇝ Cotton on Kids ⇝ Target ⇝ Kidstuff ⇝ Adairs Kids ⇝ Stokke ⇝ Bonds Kids ⇝ Priceline ⇝ Bed Bath N’ Table ⇝ EscalatorB_L5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, J.; Zlatanova, S.; Lee, J.; Liu, Q. Indoor Traveling Salesman Problem (ITSP) Path Planning. ISPRS Int. J. Geo-Inf. 2021, 10, 616. https://doi.org/10.3390/ijgi10090616
Yan J, Zlatanova S, Lee J, Liu Q. Indoor Traveling Salesman Problem (ITSP) Path Planning. ISPRS International Journal of Geo-Information. 2021; 10(9):616. https://doi.org/10.3390/ijgi10090616
Chicago/Turabian StyleYan, Jinjin, Sisi Zlatanova, Jinwoo (Brian) Lee, and Qingxiang Liu. 2021. "Indoor Traveling Salesman Problem (ITSP) Path Planning" ISPRS International Journal of Geo-Information 10, no. 9: 616. https://doi.org/10.3390/ijgi10090616
APA StyleYan, J., Zlatanova, S., Lee, J., & Liu, Q. (2021). Indoor Traveling Salesman Problem (ITSP) Path Planning. ISPRS International Journal of Geo-Information, 10(9), 616. https://doi.org/10.3390/ijgi10090616