
3D Modeling of Individual Trees from LiDAR and Photogrammetric Point Clouds by Explicit Parametric Representations for Green Open Space (GOS) Management

 ,
, 
Abstract
:1. Introduction
2. Related Work
3. Data and Employed Methods
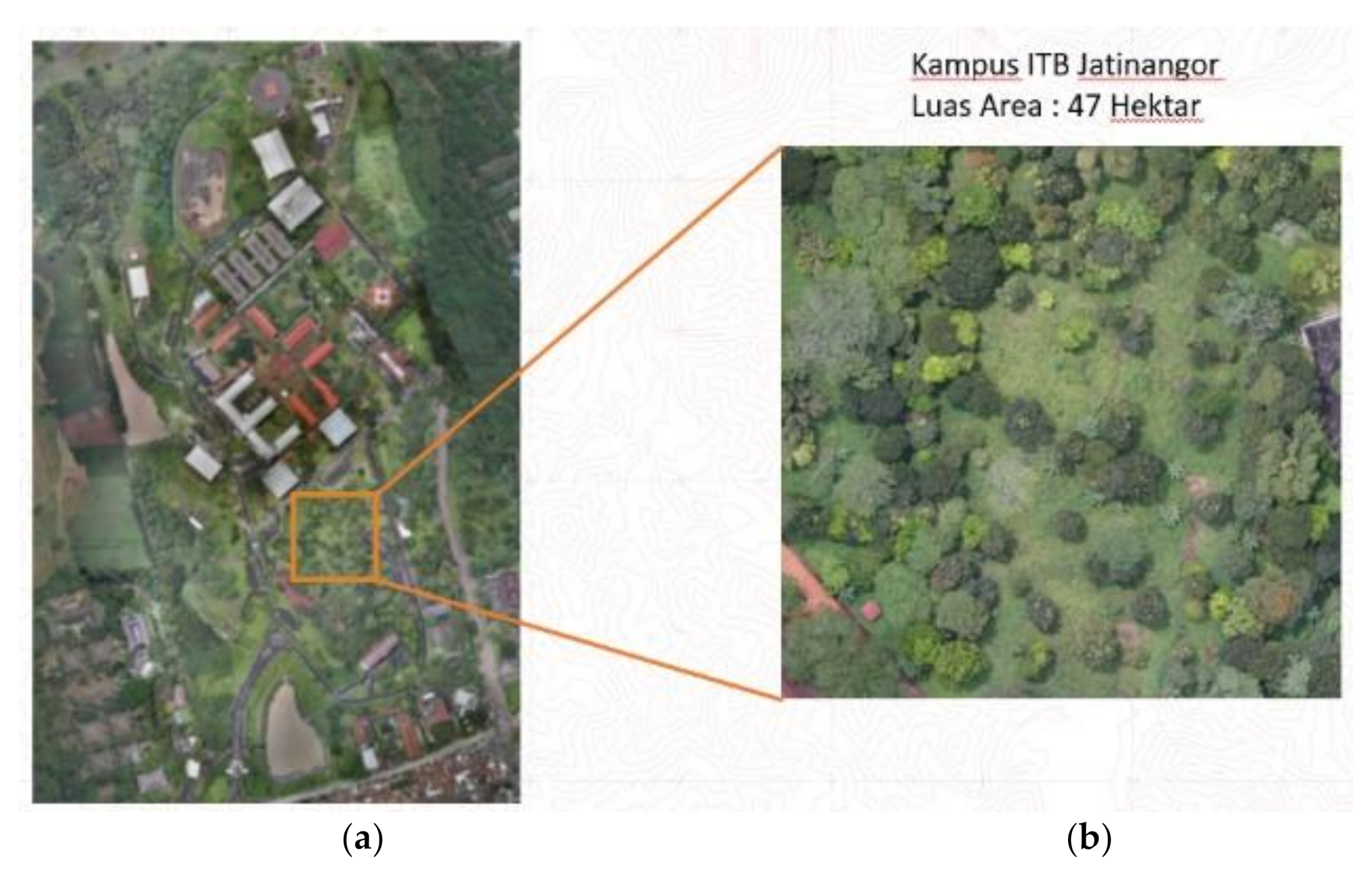
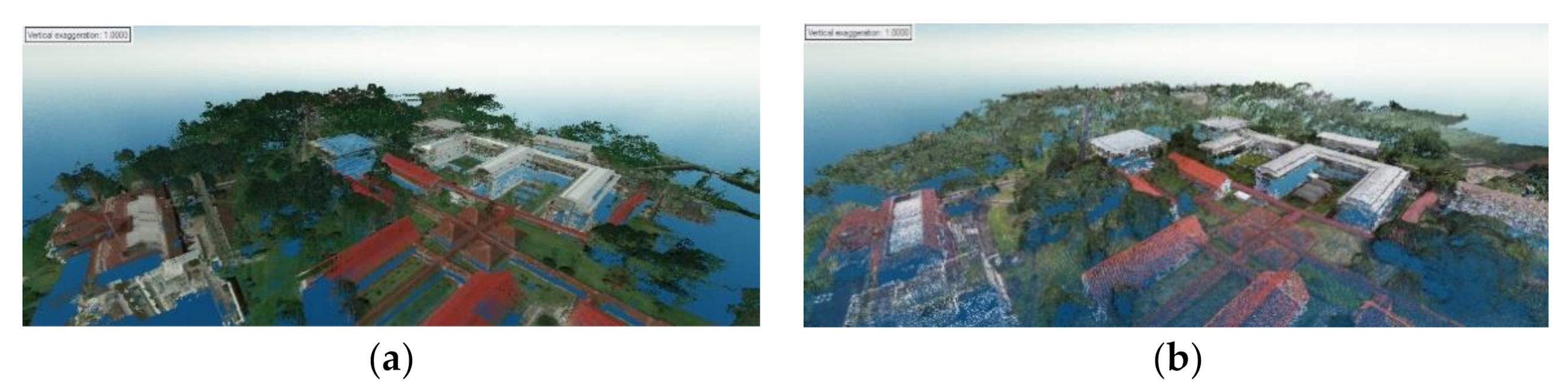
3.1. Data
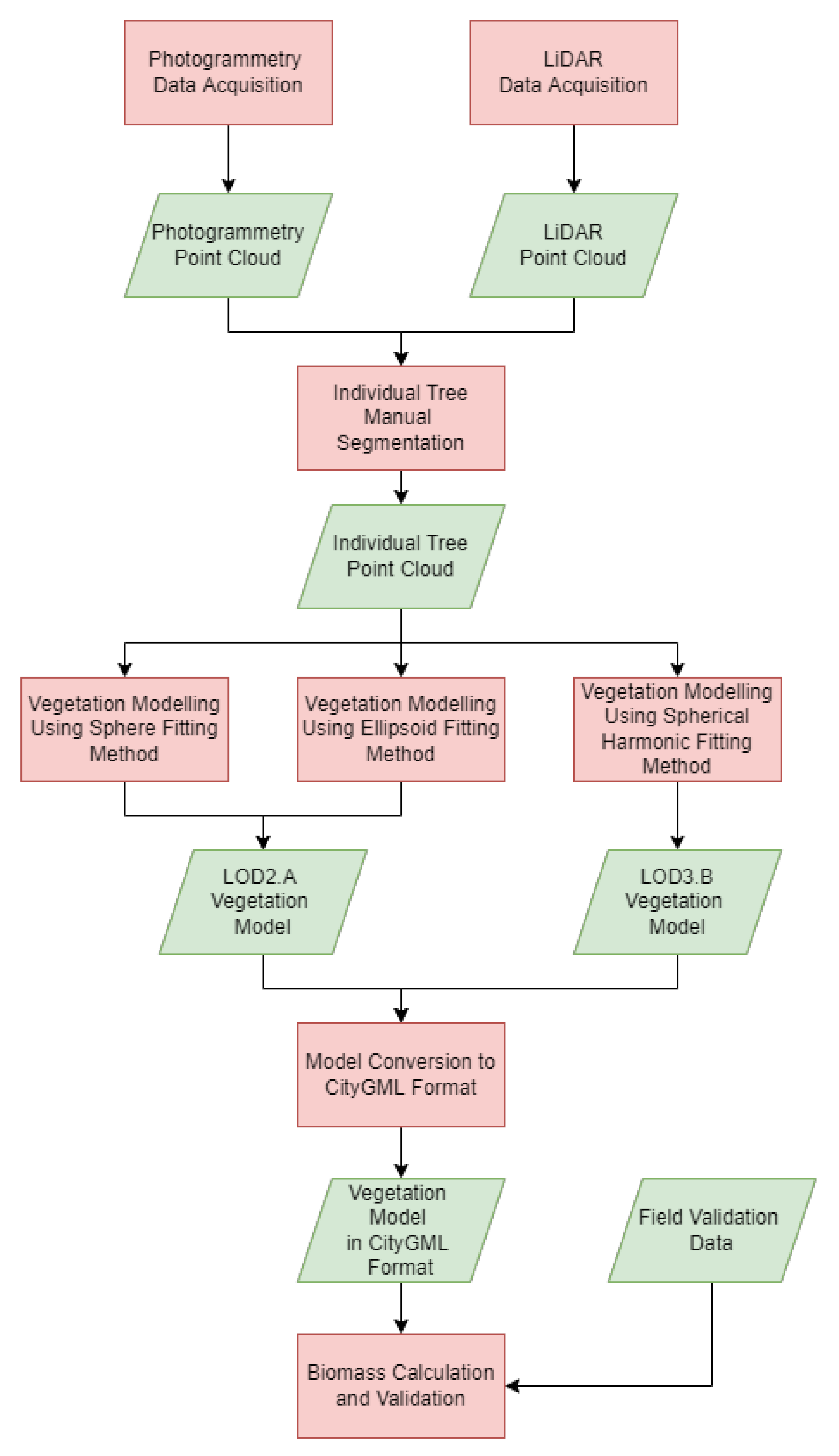
3.2. Method
3.2.1. Best Fitting Method
3.2.2. Accuracy Assesment of Best Fitting
3.2.3. Diameter Breast Height and Biomass Calculation
4. Results
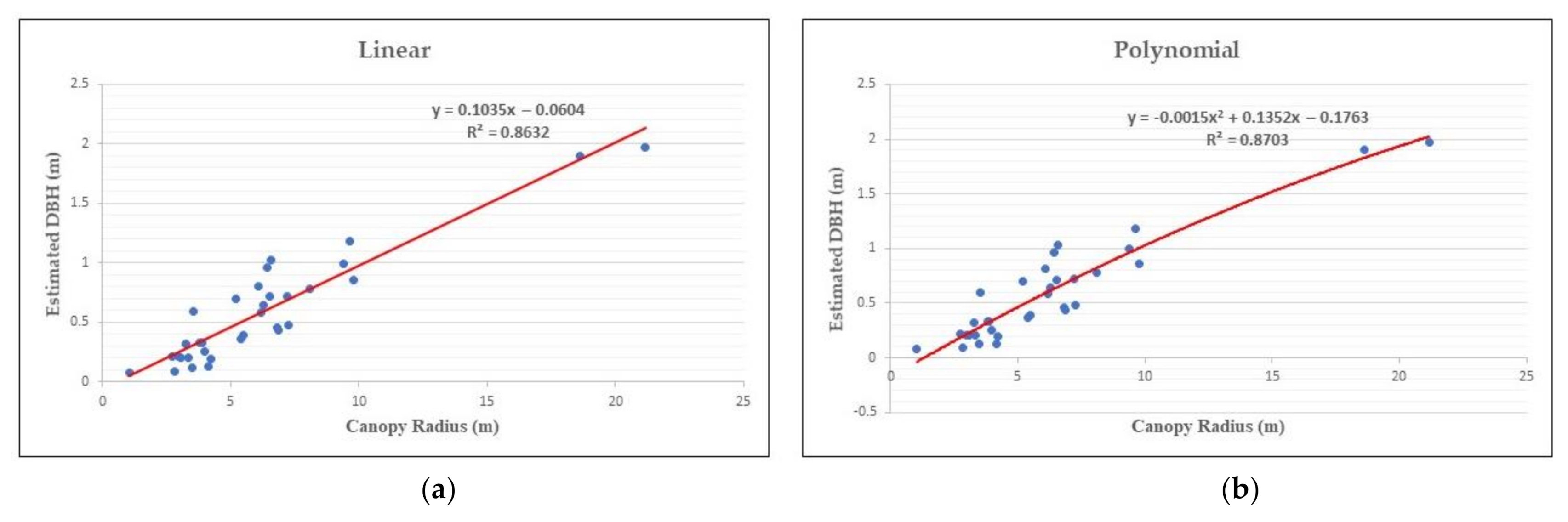
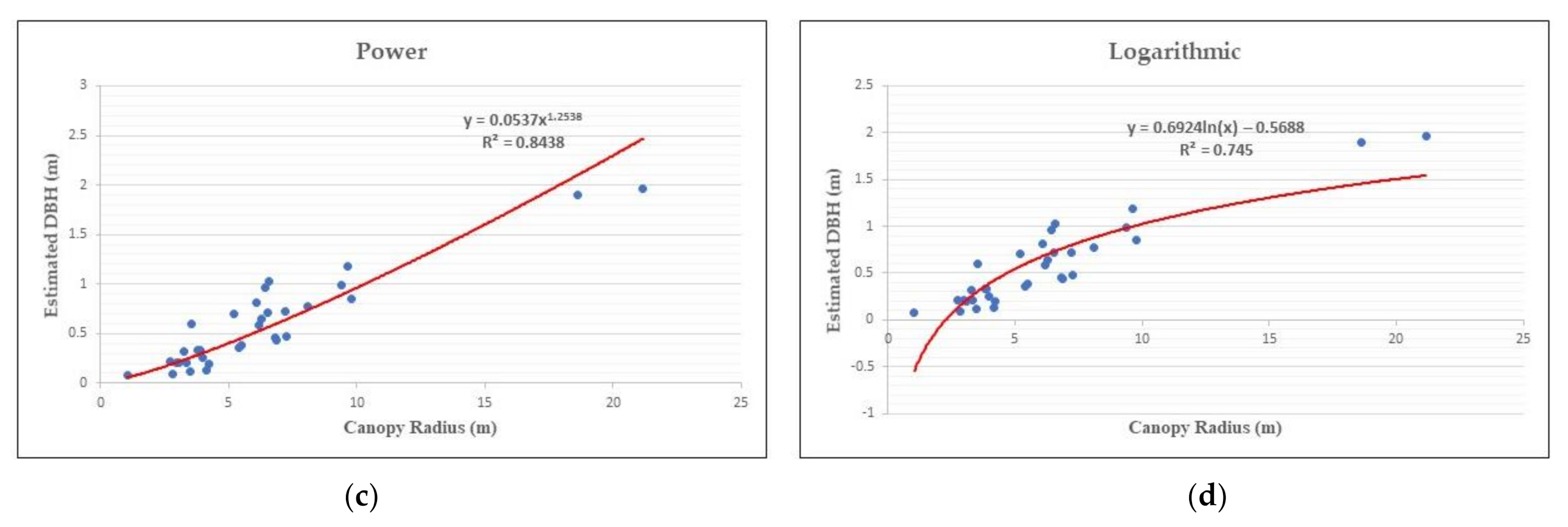
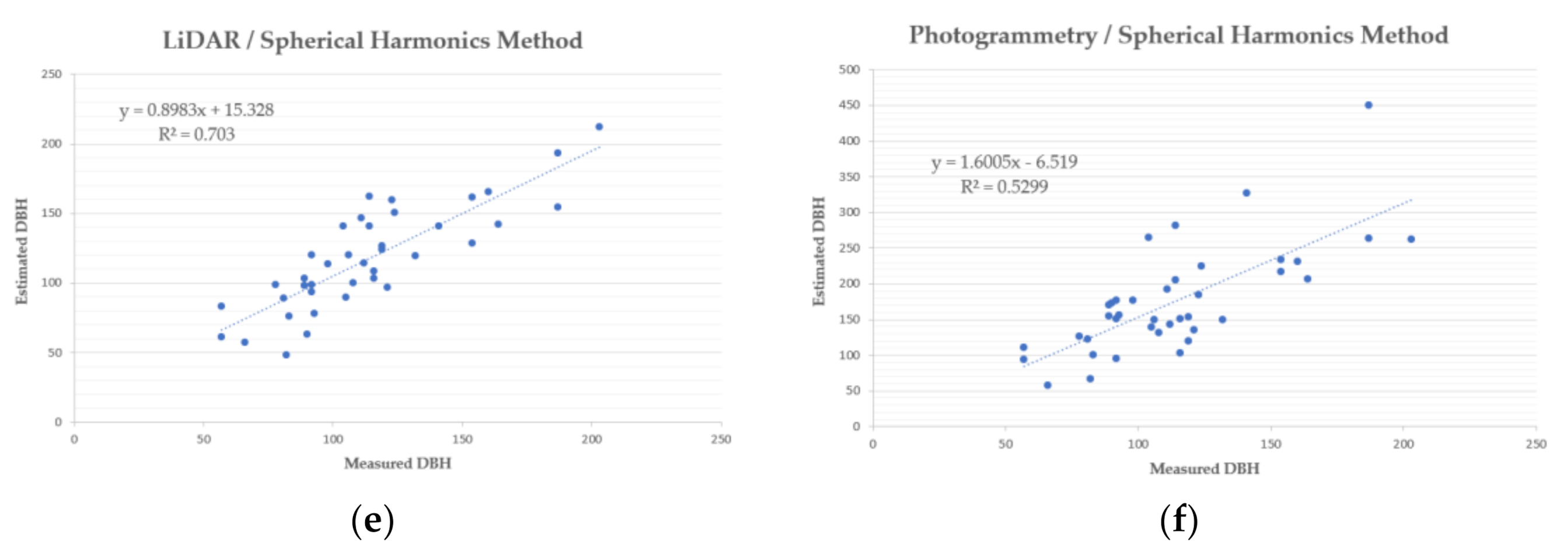
4.1. Diameter Breast Height (DBH) Model
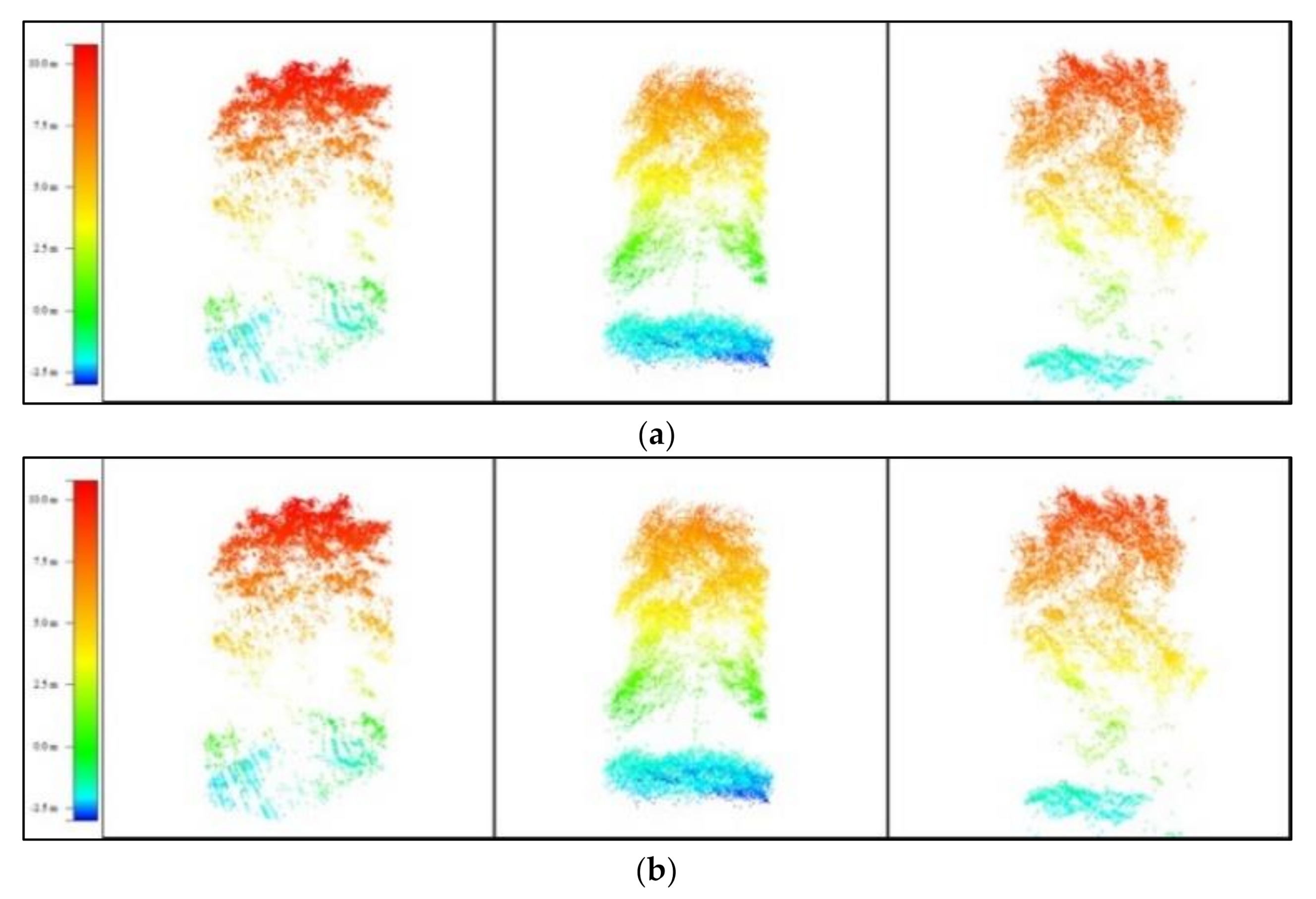
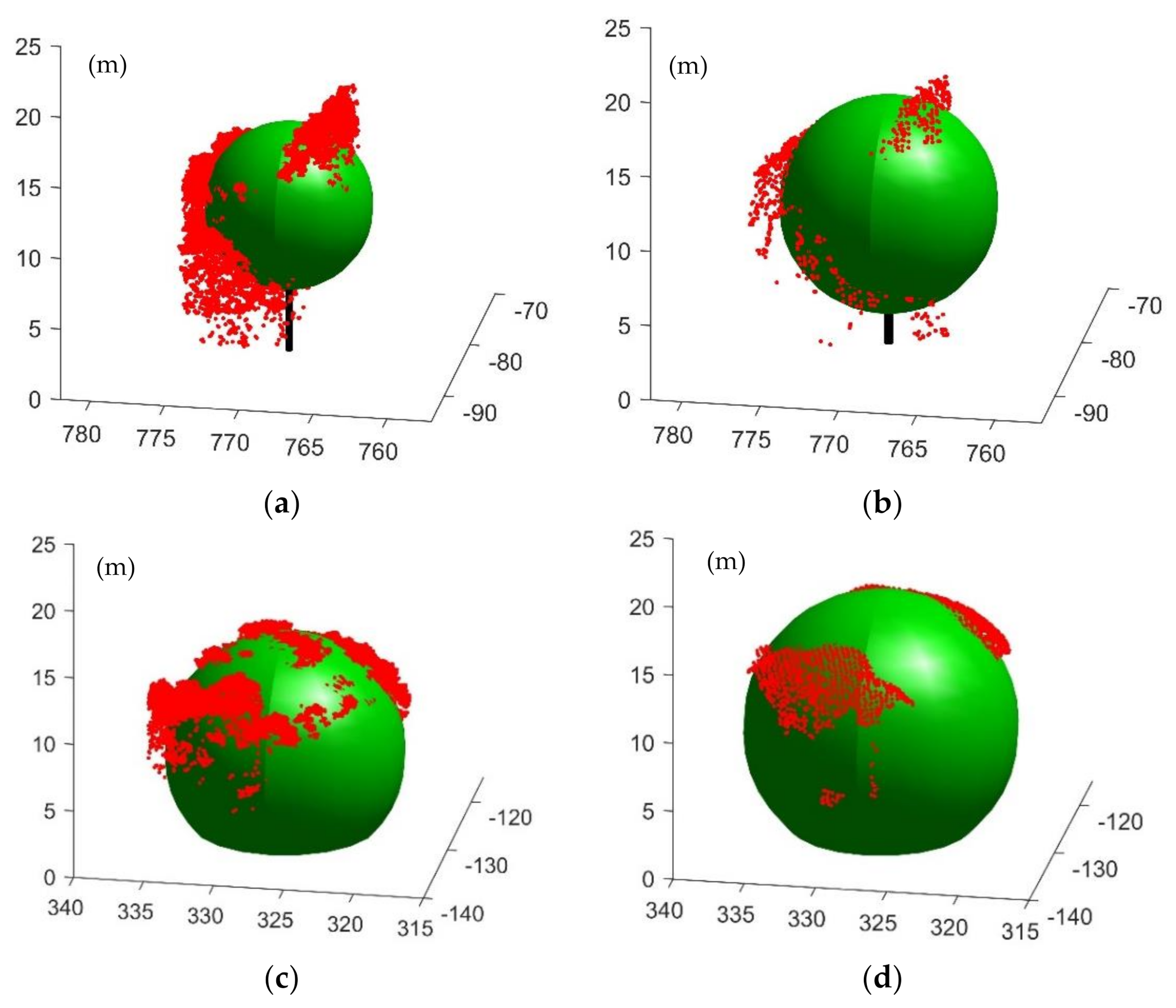
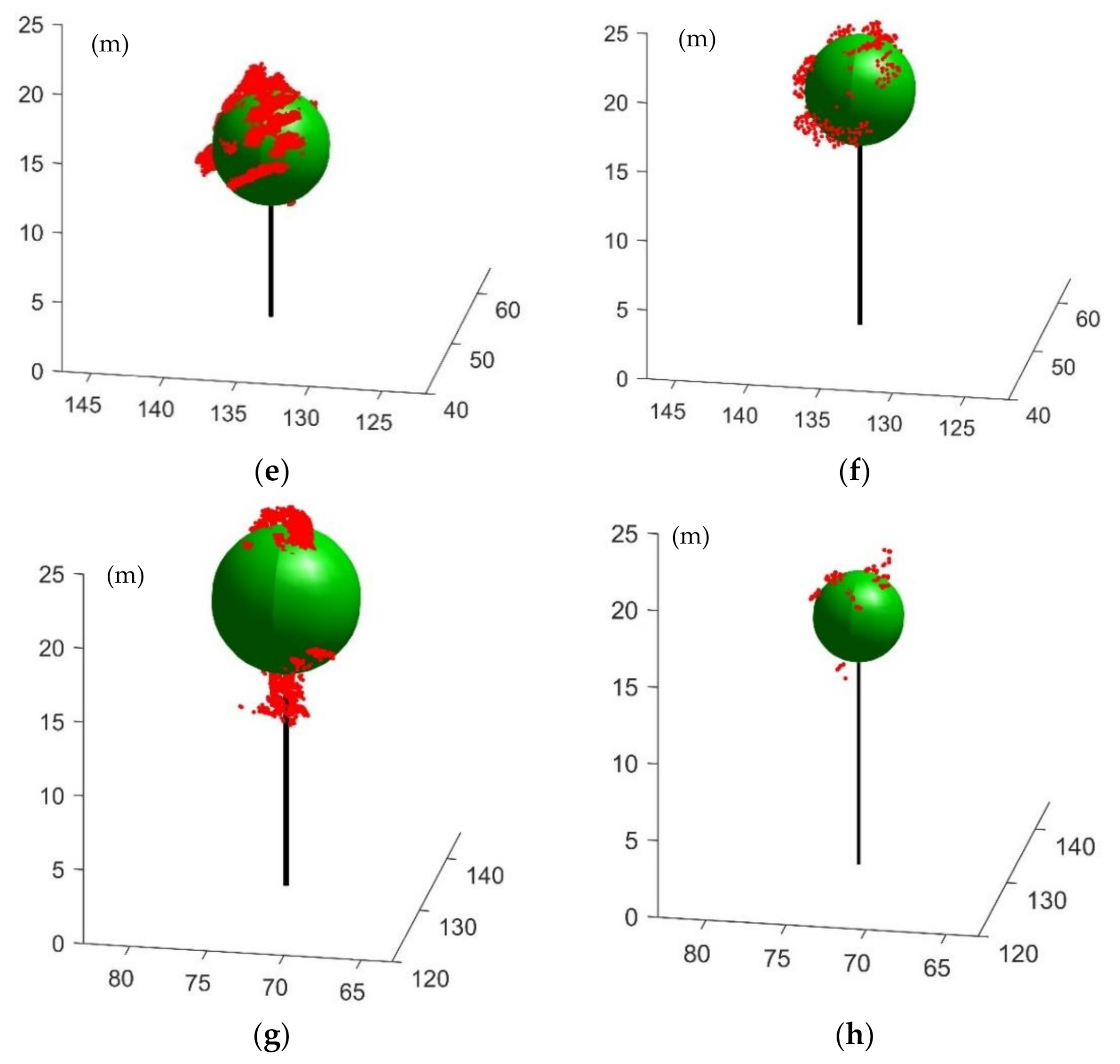
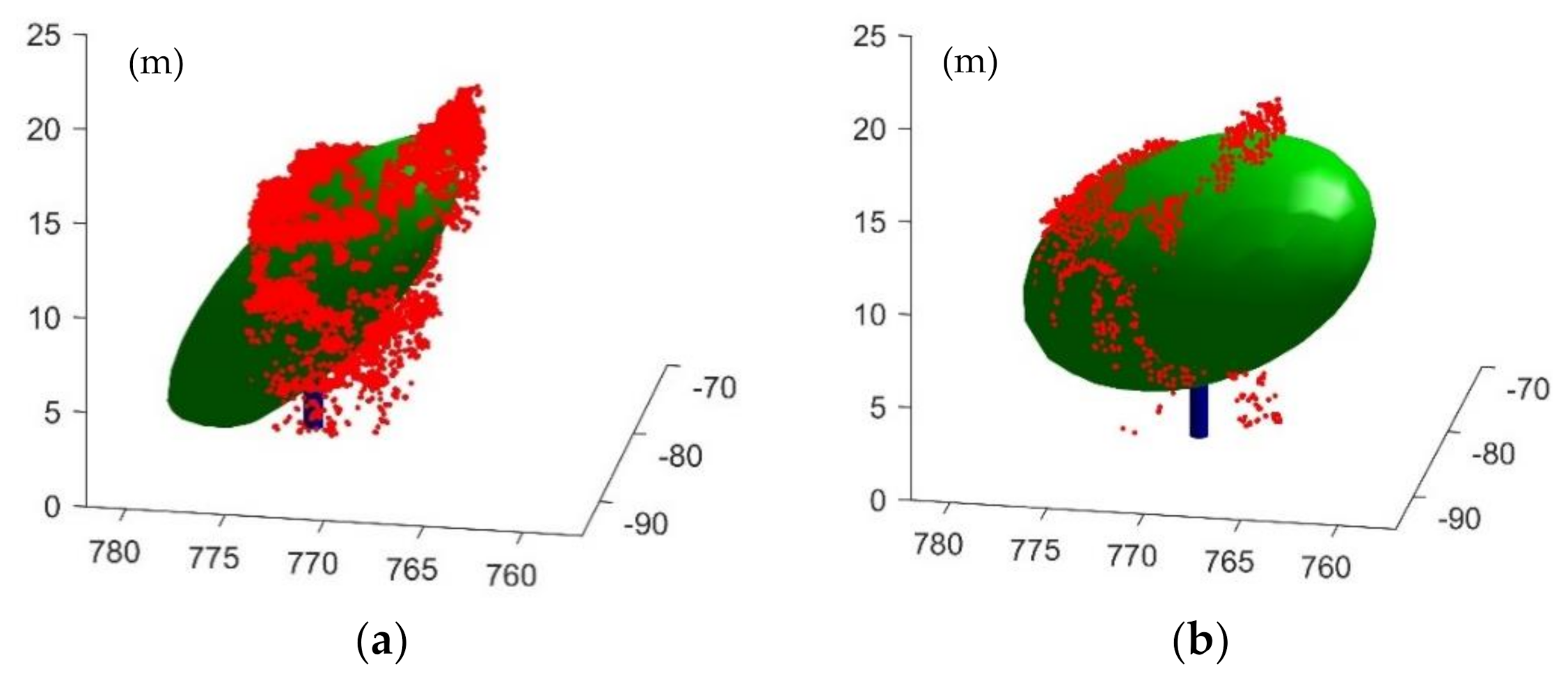
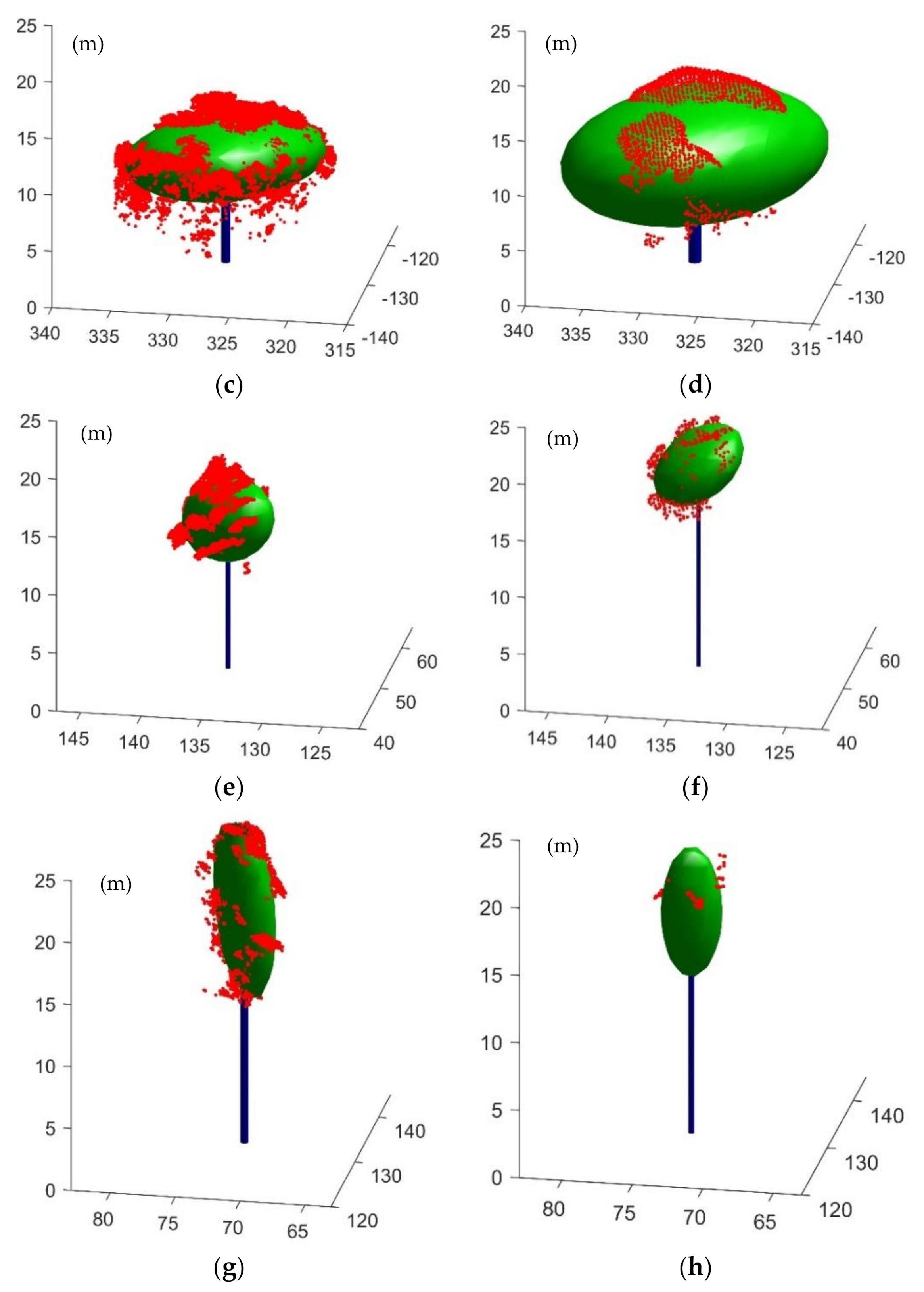
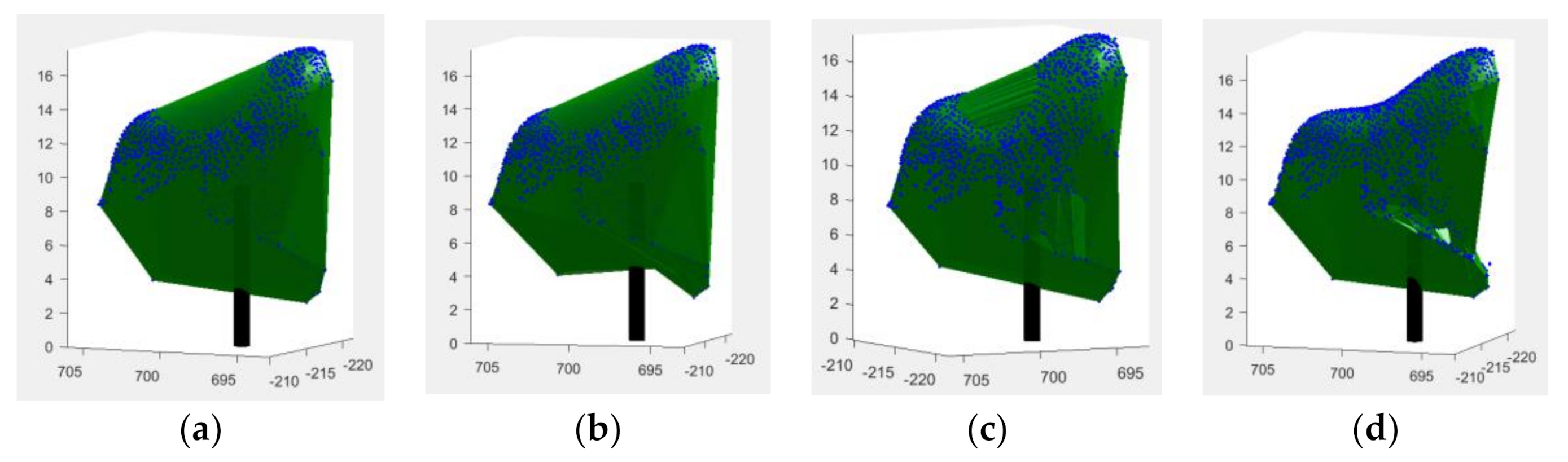
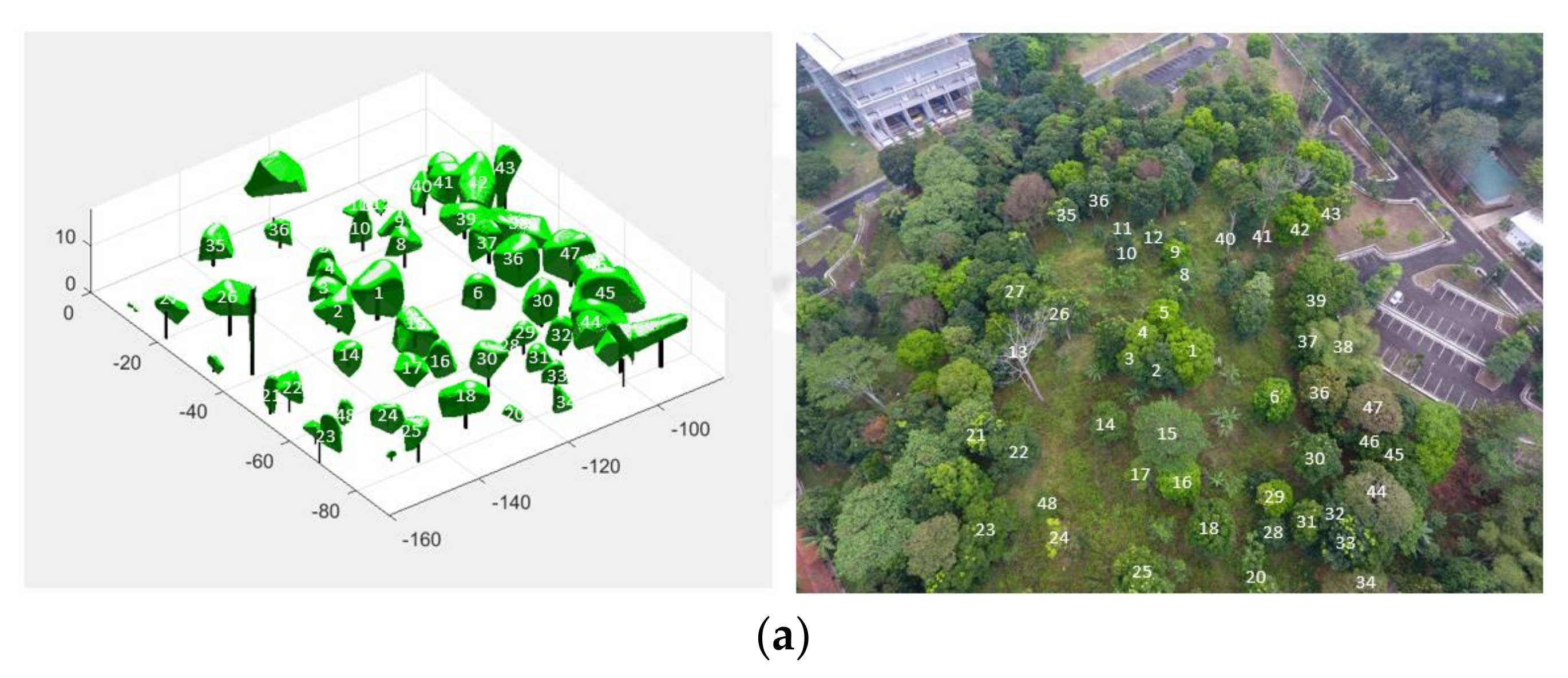
4.2. Point Clouds Fitting Result
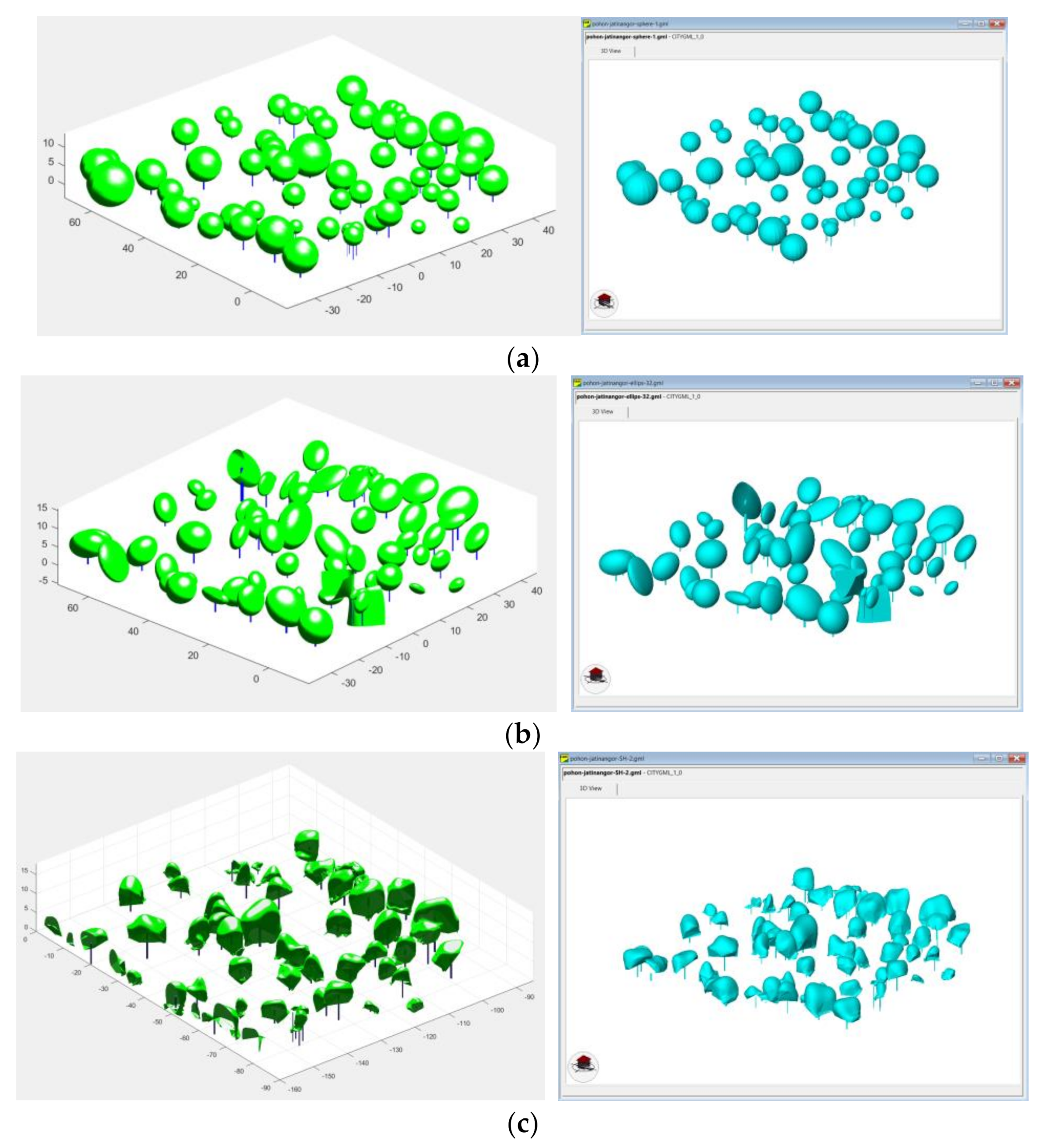
4.3. CityGML Conversion Result
4.4. Biomass Estimation
5. Discussion
5.1. Diameter Breast Height (DBH) Estimation Analysis
5.2. D Reconstruction of Trees Analysis
5.3. CityGML Conversion and Data Storage
5.4. Above-Ground Biomass Estimation Analysis
5.5. Vizualization Validation
6. Conclusions and Suggestions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Vitousek, P.M. Beyond global warming: Ecology and global change. Ecology 1994, 75, 1861–1876. [Google Scholar] [CrossRef]
- Ribeiro, H.V.; Rybski, D.; Kropp, J.P. Effects of changing population or density on urban carbon dioxide emissions. Nat. Commun. 2019, 10, 3204. [Google Scholar] [CrossRef] [Green Version]
- Jayawardena, A.W. Climate change—Is it the cause or the effect? KSCE J. Civ. Eng. 2015, 19, 359–365. [Google Scholar] [CrossRef]
- Shi, A. Population growth and global carbon dioxide emissions. In IUSSP Conference in Brazil/Session-s09; The World Bank: Washington, DC, USA, 2001. [Google Scholar]
- Kampa, M.; Castanas, E. Human health effects of air pollution. Environ. Pollut. 2008, 151, 362–367. [Google Scholar] [CrossRef] [PubMed]
- Heidt, V.; Neef, M. Benefits of urban green space for improving urban climate. In Ecology, Planning, and Management of Urban Forests; Springer: New York, NY, USA, 2008; pp. 84–96. [Google Scholar]
- Lubis, S.H.; Arifin, H.S.; Samsoedin, I. Analisis cadangan karbon pohon pada lanskap hutan kota di DKI Jakarta. J. Penelit. Sos. Ekon. Kehutan. 2013, 10, 1–20. [Google Scholar] [CrossRef]
- Lessie, O.-C. Urban Vegetation Modeling 3D Levels of Detail. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2018. [Google Scholar]
- Yao, Z.; Nagel, C.; Kunde, F.; Hudra, G.; Willkomm, P.; Donaubauer, A.; Adolphi, T.; Kolbe, T.H. 3DCityDB—A 3D Geodatabase Solution for the Management, Analysis, and Visualization of Semantic 3D City Models Based on CityGML. Open Geospat. Data Softw. Stand. 2018, 3, 5. [Google Scholar] [CrossRef] [Green Version]
- Biljecki, F.; Stoter, J.; Ledoux, H.; Zlatanova, S.; Çöltekin, A. Applications of 3D City Models: State of the Art Review. ISPRS Int. J. Geo-Inf. 2015, 4, 2842–2889. [Google Scholar] [CrossRef] [Green Version]
- Konde, A.; Saran, S. Web enabled spatio-temporal semantic analysis of traffic noise using CityGML. J. Geomat. 2017, 11, 248–259. [Google Scholar]
- Kavisha, K.; Ledoux, H.; Commandeur, T.J.F.; Stoter, J.E.; Kavisha, K. Modeling urban noise in CityGML ADE: Case of the Netherlands. In Proceedings of the 12th 3D Geoinfo Conference, Melbourne, Australia, 26–27 October 2017; p. 4. [Google Scholar]
- Hajji, R.; Yaagoubi, R.; Meliana, I.; Laafou, I.; Gholabzouri, A.E. Development of an Integrated BIM-3D GIS Approach for 3D Cadastre in Morocco. ISPRS Int. J. Geo-Inf. 2021, 10, 351. [Google Scholar] [CrossRef]
- Stojanovic, V.; Trapp, M.; Richter, R.; Hagedorn, B.; Döllner, J. Towards the generation of digital twins for facility management based on 3D point clouds. In Proceeding of the 34th Annual ARCOM Conference, Belfast, UK, 3–5 September 2018; pp. 270–279. [Google Scholar]
- Singh, S.; Shrivastava, V.; Sharma, V. CityGML based 3D modeling of urban area using UAV dataset for estimation of solar potential. In Proceedings of the International Conference on Unmanned Aerial System in Geomatics, Roorkee, India, 6–7 April 2019; pp. 355–367. [Google Scholar]
- Rosser, J.F.; Long, G.; Zakhary, S.; Boyd, D.S.; Mao, Y.; Robinson, D. Modeling urban housing stocks for building energy simulation using CityGML EnergyADE. ISPRS Int. J. Geo-Inf. 2019, 8, 163. [Google Scholar] [CrossRef] [Green Version]
- Bao, K.; Padsala, R.; Thrän, D.; Schröter, B. Urban Water Demand Simulation in Residential and Non-Residential Buildings Based on a CityGML Data Model. ISPRS Int. J. Geo-Inf. 2020, 9, 642. [Google Scholar] [CrossRef]
- Toschi, I.; Ramos, M.M.; Nocerino, E.; Menna, F.; Remondino, F.; Moe, K.; Fassi, F. Oblique photogrammetry supporting 3D urban reconstruction of complex scenarios. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-1/W1, 519–526. [Google Scholar] [CrossRef] [Green Version]
- Jayaraj, P.; Ramiya, A.M. 3D Citygml Building Modeling from Lidar Point Cloud Data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-5, 175–180. [Google Scholar] [CrossRef] [Green Version]
- Popovic, D.; Govedarica, M.; Jovanovic, D.; Radulovic, A.; Simeunovic, V. 3D Visualization of Urban Area Using Lidar Technology and CityGML. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2017; p. 95. [Google Scholar]
- Ortega, S.; Santana, J.M.; Wendel, J.; Trujillo, A.; Murshed, S.M. Generating 3D city models from open LiDAR point clouds: Advancing towards smart city applications. In Open Source Geospatial Science for Urban Studies; Springer: New York, NY, USA, 2021; pp. 97–116. [Google Scholar]
- Ledoux, H.; Biljecki, F.; Dukai, B.; Kumar, K.; Peters, R.; Stoter, J.; Commandeur, T. 3dfier: Automatic reconstruction of 3D city models. J. Open Source Softw. 2021, 6, 2866. [Google Scholar] [CrossRef]
- Guo, Z.; Liu, H.; Pang, L.; Fang, L.; Dou, W. DBSCAN-based point cloud extraction for Tomographic synthetic aperture radar (TomoSAR) three-dimensional (3D) building reconstruction. Int. J. Remote Sens. 2021, 42, 2327–2349. [Google Scholar] [CrossRef]
- Sharafzadeh, A.; Esmaeily, A.; Dehghani, M. 3D Modeling of Urban Area Using Synthetic Aperture Radar (SAR). J. Indian Soc. Remote Sens. 2018, 46, 1785–1793. [Google Scholar] [CrossRef]
- Kolbe, T.H. Representing and exchanging 3D city models with CityGML. In 3D Geo-Information Sciences; Springer: Berlin/Heidelberg, Germany, 2009; pp. 15–31. [Google Scholar]
- Biljecki, F.; Ledoux, H.; Stoter, J. An improved LOD specification for 3D building models. Comput. Environ. Urban Syst. 2016, 59, 25–37. [Google Scholar] [CrossRef] [Green Version]
- Arroyo Ohori, K.; Biljecki, F.; Kumar, K.; Ledoux, H.; Stoter, J. Modeling Cities and Landscapes in 3D with CityGML. In Building Information Modeling; Springer: Cham, Switzerland, 2018; pp. 199–215. [Google Scholar]
- Trisyanti, S.W.; Suwardhi, D.; Harto, A.B. 3D Landscape Recording and Modeling of Individual Trees. Hayati J. Biosci. 2019, 26, 185–195. [Google Scholar] [CrossRef]
- Gobeawan, L.; Lin, E.S.; Tandon, A.; Yee, A.T.K.; Khoo, V.H.S.; Teo, S.N.; Poto, M.T. Modeling Trees for Virtual Singapore: From Data Acquisition to Citygml Models. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-4/W10, 42. [Google Scholar] [CrossRef] [Green Version]
- Agus, M.; Veloz Castillo, M.; Garnica Molina, J.F.; Gobbetti, E.; Lehväslaiho, H.; Morales Tapia, A.; Calí, C. Shape analysis of 3D nanoscale reconstructions of brain cell nuclear envelopes by implicit and explicit parametric representations. Comput. Graph. X 2019, 1, 100004. [Google Scholar] [CrossRef]
- Fan, G.; Nan, L.; Dong, Y.; Su, X.; Chen, F. AdQSM: A New Method for Estimating Above-Ground Biomass from TLS Point clouds. Remote Sens. 2020, 12, 3089. [Google Scholar] [CrossRef]
- Wagers, S.; Castilla, G.; Filiatrault, M.; Sanchez-Azofeifa, G.A. Using TLS-Measured Tree Attributes to Estimate above Ground Biomass in Small Black Spruce Trees. Forests 2021, 12, 1521. [Google Scholar] [CrossRef]
- Ten Harkel, J.; Bartholomeus, H.; Kooistra, L. Biomass and crop height estimation of different crops using UAV-based LiDAR. Remote Sens. 2020, 12, 17. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez de Tanago, J.; Lau, A.; Bartholomeus, H.; Herold, M.; Avitabile, V.; Raumonen, P.; Calders, K. Estimation of above-ground biomass of large tropical trees with terrestrial LiDAR. Methods Ecol. Evol. 2018, 9, 223–234. [Google Scholar] [CrossRef] [Green Version]
- Walter, J.; Edwards, J.; McDonald, G.; Kuchel, H. Photogrammetry for the estimation of wheat biomass and harvest index. Field Crops Res. 2018, 216, 165–174. [Google Scholar] [CrossRef]
- Gil-Docampo, M.D.L.L.; Arza-García, M.; Ortiz-Sánz, J.; Martínez-Rodriguez, S.; Marcos-Robles, J.L.; Sánchez-Sastre, L.F. Above-ground biomass estimation of arable crops using UAV-based SfM photogrammetry. Geocarto Int. 2020, 35, 687–699. [Google Scholar] [CrossRef]
- Ketterings, Q.M.; Coe, R.; van Noordwijk, M.; Palm, C.A. Reducing uncertainty in the use of allometric biomass equations for predicting above-ground tree biomass in mixed secondary forests. For. Ecol. Manag. 2001, 146, 199–209. [Google Scholar] [CrossRef]
- Yan, Z.; Liu, R.; Cheng, L.; Zhou, X.; Ruan, X.; Xiao, Y. A concave hull methodology for calculating the crown volume of individual trees based on vehicle-borne LiDAR data. Remote Sens. 2019, 11, 623. [Google Scholar] [CrossRef] [Green Version]
- Trochta, J.; Krůček, M.; Vrška, T.; Král, K. 3D Forest: An application for descriptions of three-dimensional forest structures using terrestrial LiDAR. PLoS ONE 2017, 12, e0176871. [Google Scholar] [CrossRef] [Green Version]
- Rachakonda, P.; Muralikrishnan, B.; Cournoyer, L.; Cheok, G.; Lee, V.; Shilling, M.; Sawyer, D. Methods and considerations to determine sphere center from terrestrial laser scanner point clouds data. Meas. Sci. Technol. 2017, 28, 105001. [Google Scholar] [CrossRef] [Green Version]
- Brown, S. Estimating Biomass and Biomass Change of Tropical Forests: A Primer; Food and Agriculture Organization: Rome, Italy, 1997; Volume 134. [Google Scholar]
- Sutaryo, D. Penghitungan Biomassa Sebuah Pengantar untuk Studi Karbon dan Perdagangan Karbon; Wetlands International Indonesia Programme: Bogor, Indonesia, 2009. [Google Scholar]
- Kuyah, S.; Muthuri, C.; Jamnadass, R.; Mwangi, P.; Neufeldt, H.; Dietz, J. Crown area allometries for estimation of aboveground tree biomass in agricultural landscapes of western Kenya. Agrofor. Syst. 2012, 86, 267–277. [Google Scholar] [CrossRef]
- Basuki, T.M.; Van Laake, P.E.; Skidmore, A.K.; Hussin, Y.A. Allometric equations for estimating the above-ground biomass in tropical lowland Dipterocarp forests. For. Ecol. Manag. 2009, 257, 1684–1694. [Google Scholar] [CrossRef]
- Liu, K.; Shen, X.; Cao, L.; Wang, G.; Cao, F. Estimating forest structural attributes using UAV-LiDAR data in Ginkgo plantations. ISPRS J. Photogramm. Remote Sens. 2018, 146, 465–482. [Google Scholar] [CrossRef]
- Iizuka, K.; Yonehara, T.; Itoh, M.; Kosugi, Y. Estimating tree height and diameter at breast height (DBH) from digital surface models and orthophotos obtained with an unmanned aerial system for a Japanese cypress (Chamaecyparis obtusa) forest. Remote Sens. 2018, 10, 13. [Google Scholar] [CrossRef] [Green Version]
- Kuželka, K.; Slavík, M.; Surový, P. Very High Density Point cloudss from UAV Laser Scanning for Automatic Tree Stem Detection and Direct Diameter Measurement. Remote Sens. 2020, 12, 1236. [Google Scholar] [CrossRef] [Green Version]
- Mokroš, M.; Liang, X.; Surový, P.; Valent, P.; Čerňava, J.; Chudý, F.; Tunák, D.; Saloň, Š.; Merganič, J. Evaluation of close-range photogrammetry image collection methods for estimating tree diameters. ISPRS Int. J. Geo-Inf. 2018, 7, 93. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y. Surface reconstruction from unorganized points using self-organizing neural networks. IEEE Vis. 1999, 99, 61–64. [Google Scholar]
- Fryskowska, A. Improvement of 3D Power Line Extraction from Multiple Low-Cost UAV Imagery Using Wavelet Analysis. Sensors 2019, 19, 700. [Google Scholar] [CrossRef] [Green Version]
- Harapan, T.S.; Husna, A.; Febriamansyah, T.A.; Mutashim, M.; Saputra, A.; Taufiq, A.; Mukhtar, E. Above Ground Biomass Estimation of Syzygium aromaticum using structure from motion (SfM) derived from Unmanned Aerial Vehicle in Paninggahan Agroforest Area, West Sumatra. J. Biol. UNAND 2021, 9, 39–46. [Google Scholar] [CrossRef]
- Ota, T.; Ogawa, M.; Shimizu, K.; Kajisa, T.; Mizoue, N.; Yoshida, S.; Ket, N. Aboveground biomass estimation using structure from motion approach with aerial photographs in a seasonal tropical forest. Forests 2015, 6, 3882–3898. [Google Scholar] [CrossRef] [Green Version]
- Maesano, M.; Khoury, S.; Nakhle, F.; Firrincieli, A.; Gay, A.; Tauro, F.; Harfouche, A. UAV-Based LiDAR for High-Throughput Determination of Plant Height and Above-Ground Biomass of the Bioenergy Grass Arundo donax. Remote Sens. 2020, 12, 3464. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Points | RMSE | ||
|---|---|---|---|
| X (cm) | Y (cm) | Z (cm) | |
| 19 | 4.62 | 3.35 | 10.67 |
| Regression Model | Equation | R2 |
|---|---|---|
| Linear | D = 0.1035r − 0.0604 | 0.863 |
| Polynomial | D = −0.0015r2 + 0.1352r − 0.1763 | 0.870 |
| Power | D = 0.0546r1.2476 | 0.847 |
| Logarithmic | D = 0.6824ln(r) − 0.5473 | 0.752 |
| Tree Sample | LiDAR Point Clouds | Photogrammetry Point Clouds | ||||
|---|---|---|---|---|---|---|
| Sphere Fitting | Ellipsoid Fitting | Spherical Harmonics Fitting | Sphere Fitting | Ellipsoid Fitting | Spherical Harmonics Fitting | |
| 1 | 0.011 | 0.829 | 0.874 | 0.002 | 0.860 | 0.741 |
| 2 | 0.007 | 0.719 | 0.882 | 0.006 | 0.708 | 0.945 |
| 3 | 0.005 | 0.388 | 0.324 | 0.010 | 0.338 | 0.448 |
| 4 | 0.029 | 0.823 | 0.842 | 0.008 | 0.952 | 0.821 |
| Fitting Method | Above-Ground Biomass (Metric tons/ha) | ||
|---|---|---|---|
| LiDAR | Photogrammetry | Field Validation | |
| Sphere | 22.157 | 64.127 | 28.423 |
| Ellipsoid | 21.084 | 65.610 | |
| Spherical Harmonics | 20.161 | 65.946 | |
| Surface Reconstruction Method | LiDAR Point Clouds | Photogrammetry Point Clouds | ||||
|---|---|---|---|---|---|---|
| Vertex | Faces | Volume (m3) | Vertex | Faces | Volume (m3) | |
| Convex Hull | 77,694 | 103,588 | 672.762 | 4644 | 6188 | 905.045 |
| Concave Hull | 77,754 | 13,668 | 726.935 | 4722 | 6292 | 902.132 |
| Alpha Shape | 117,981 | 157,304 | 627.068 | 4881 | 6504 | 852.709 |
| Robust Crust | 236,028 | 314,700 | 596.224 | 9732 | 12,972 | 824.963 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suwardhi, D.; Fauzan, K.N.; Harto, A.B.; Soeksmantono, B.; Virtriana, R.; Murtiyoso, A. 3D Modeling of Individual Trees from LiDAR and Photogrammetric Point Clouds by Explicit Parametric Representations for Green Open Space (GOS) Management. ISPRS Int. J. Geo-Inf. 2022, 11, 174. https://doi.org/10.3390/ijgi11030174
Suwardhi D, Fauzan KN, Harto AB, Soeksmantono B, Virtriana R, Murtiyoso A. 3D Modeling of Individual Trees from LiDAR and Photogrammetric Point Clouds by Explicit Parametric Representations for Green Open Space (GOS) Management. ISPRS International Journal of Geo-Information. 2022; 11(3):174. https://doi.org/10.3390/ijgi11030174
Chicago/Turabian StyleSuwardhi, Deni, Kamal Nur Fauzan, Agung Budi Harto, Budhy Soeksmantono, Riantini Virtriana, and Arnadi Murtiyoso. 2022. "3D Modeling of Individual Trees from LiDAR and Photogrammetric Point Clouds by Explicit Parametric Representations for Green Open Space (GOS) Management" ISPRS International Journal of Geo-Information 11, no. 3: 174. https://doi.org/10.3390/ijgi11030174