
Precise Indoor Path Planning Based on Hybrid Model of GeoSOT and BIM

Abstract
:1. Introduction
- A method of finding the shortest path using GPS signal transmitters or based on 2D floor plan architectural drawings [5]. However, due to the lack of basic building data information, it is difficult to ensure the accuracy of the indoor map because it cannot take into account indoor obstacle entities, and, therefore, there are many errors in the planned paths, and there are many limitations in the intuitiveness and practicality of path representation and the planning of cross-floor paths within the building.
- The method of adding the indoor map function to the outdoor navigation map is adopted [6,7,8,9]. Users can view the interior of the building through the indoor map and can switch to different floors to view. Nonetheless, the display of the indoor map is based on the uploading of the indoor 2D floor plan, and the location information service for the 3D visualization of the interior space of the building has not yet been realized.
- In the third method, the computer adopts the indoor path planning method based on BIM (Building Information modeling) technology [10,11,12,13,14,15,16]. Using the BIM model as the data source for path planning, and traversing all the nodes in the model through an algorithm, the indoor path can be obtained. However, this method is more suitable for the situation of simple building structure and a few room units. Traversing all nodes takes a lot of time, thereby affecting the optimality of the path. It lacks the efficient use of the building’s own geometry and attribute information, as well as the consideration of the internal spatial topology of the building. It is difficult to meet the indoor multi-layer continuous path planning needs of the space.
2. Models and Methods
2.1. GeoSOT Global Meshing
- The first aspect converts the latitude, longitude, and elevation to the GeoSOT global grid code. For example, given the longitude, latitude, and elevation of a certain point, this method finds the voxel code corresponding to the GeoSOT global grid corresponding to the point.
- The second aspect converts the GeoSOT global grid to latitude, longitude, and elevation. This method, given a GeoSOT global grid voxel code, finds the longitude, latitude, and elevation of the positioning corner of the grid voxel code.
- Longitude, Latitude, and Elevation to GeoSOT Global Grid Code.
- GeoSOT Global Subdivision Grid to Latitude and Longitude and Elevation.
2.2. Building Information Modeling
- Building data information integration. The parametric model established by BIM technology is an integrated expression of building information. This subset covers complete building data information including geometric data, functional data, and attribute data. These data information sets are associated with each other and can be updated and recalled in real time [32]. BIM models, therefore, can be used as “building data sources” for indoor path planning. Through model analysis and information extraction, combined with GeoSOT grid division, an accurate indoor grid map can be generated, thereby laying the foundation for indoor path planning.
- Model information is highly versatile. The BIM model adopts the object-oriented method to describe the complete information data of the building including the three-dimensional geometric shape information and attribute information. These object-oriented information data are editable and extensible [33]. The model information storage adopts IFC (Industry Foundation Classes) [34,35,36], a common data model standard in the international intelligent building field—as the 3D data interaction format. IFC regulates the various information descriptions and definitions during the use of the building information model [37]; it can, therefore, not only meet the application requirements of indoor path planning, but also support multi-platform information sharing and improve the accuracy and versatility of indoor paths from planning to expression through the introduction of information models.
2.3. Precise Indoor Path Planning
2.3.1. Indoor Grid Map Design and Construction
- BIM model data pre-processing, including BIM model format conversion, BIM model parsing, and BIM model coordinate conversion, which are combined.
- Format conversion, mainly for the problem that the Cesium platform does not support loading, converts the file into an easy-to-parse and loadable GLTF file.
- Model parsing is used mainly to parse the converted GLTF file to obtain the attributes and coordinates of each indoor building.
- Coordinate transformation, the coordinates parsed from the BIM model, are relative coordinates. To clarify, the coordinates are the offset relative to the center point of the model. Therefore, it is necessary to unify to the WGS84 (World Geodetic System 1984).
- The design and generation of internal grid maps of BIM models, including the design of grid size and level and the design of data storage in a single grid unit.
- GeoSOT divides the mesh size and level design according to the size of the actual building model, selects the mesh level suitable for the scale and determines the size of a single mesh. According to the estimate of half of the actual door width, the size of a single grid used is 0.5 m (Approximate size near the equator). Referring to the GeoSOT grid level table, it can be seen the level is 27 levels.
- The design of the storage data of a single grid unit, the coordinate information and attribute information of each component of the building obtained by analysis, such as walls, stairs, doors, and windows, etc., are analyzed and gridded separately, and finally the accurate grid map inside the building information model is generated. According to the [0, 1] binary method, it is used as a flag to judge whether the grid is passable or not. Among them, 0 is passable and 1 is not passable.
2.3.2. Indoor Space Grid Computing
- Spatial grid neighborhood location calculation.
- Forward longitude neighborhood encoding:
- Negative longitude neighborhood encoding:
- Forward latitude neighborhood encoding:
- Negative latitude neighborhood encoding:
- 2.
- Spatial grid distance calculation.
- The two spatial grids of the input calculation distance are at the same level.
- If the input two spatial grids are M and N, respectively, the GeoSOT binary two-dimensional codes are , . Assuming the function of the total distance between two grids in the longitude direction or the latitude direction is FMN, the distance DMN between the two two-dimensional space grids satisfies the Equation (7).
2.3.3. GeoSOT-A* Algorithm
- Indoor single-story path planning, based on the GeoSOT grid division processing the floor area, uses the A* algorithm to search the target area and determines the best path through the optimal evaluation of the A* algorithm.
- Indoor multi-story path planning, based on the GeoSOT-A* algorithm for the starting floor and the target floor in the BIM model, respectively—on the basis of the GeoSOT meshing—the A* algorithm is used to search the path of the starting floor and the target floor at the same time. Taking the stairs in the building as the intermediate node of multi-floor path planning, the optimality evaluation of the planned paths in each floor is carried out. Finally, through the comparison of the weight values of each path, the optimal path of the multi-layer indoor space is determined.
3. Results
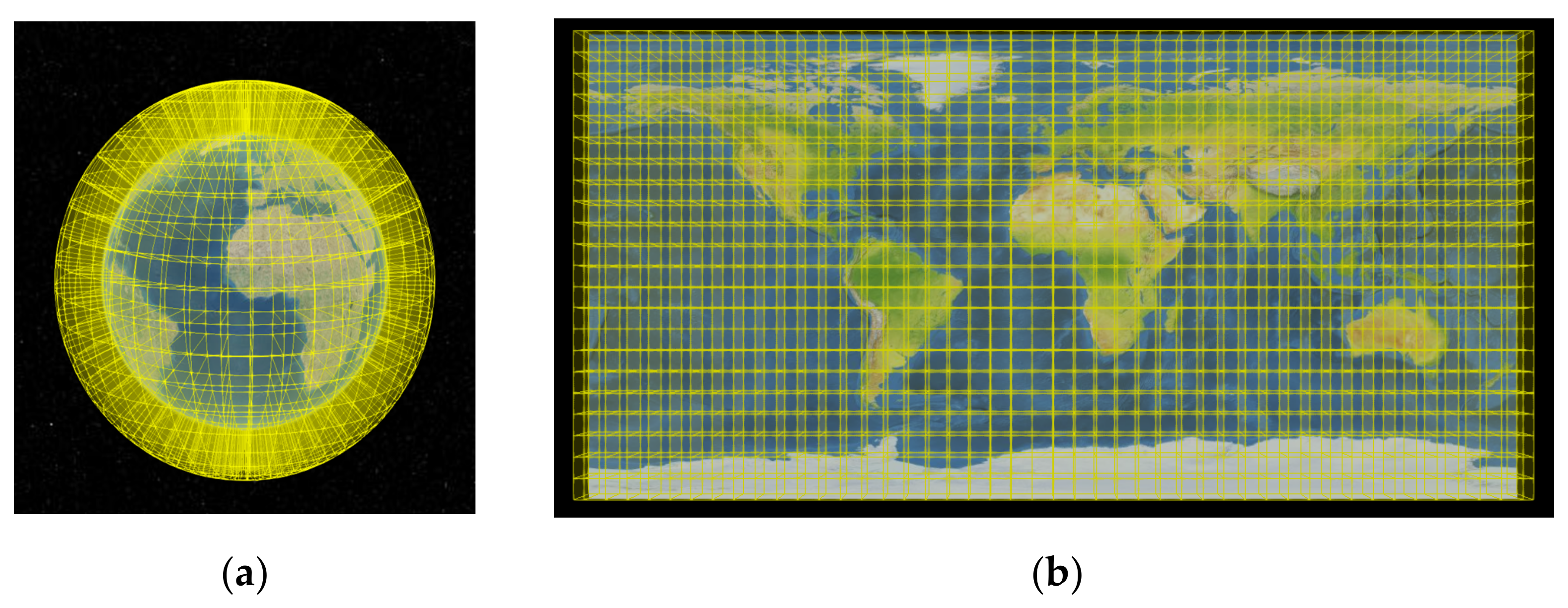
- GeoSOT meshes the Earth. A three-dimensional digital globe is built on the Cesium platform, which is a cross-platform virtual globe for dynamic spatial data visualization [13,15]. Then, the earth space is decomposed into a multi-scale nested space three-dimensional grid system according to the GeoSOT subdivision technology to realize the GeoSOT grid subdivision of the Earth, as shown in Figure 12.
- 2.
- BIM model parsing and loading. The BIM model is loaded in the real location of the building (Guanlan Commercial Street, Baiyin City) according to the 1:1 scale of the real object, as shown in Figure 13.
- 3.
- The BIM model analyzes and generates an indoor grid topology map. As mentioned above, by analyzing the BIM model, the coordinates and attribute information of each component in the building model are obtained. Then, after the coordinate conversion processing, the WGS84 geographic coordinates of each component on the three-dimensional sphere are obtained. According to the indoor grid map generation steps described above, the grid map inside the BIM model is obtained, as shown in Figure 14. In this map, black indicates impassable areas, light colors indicate passable areas, and each mesh is associated with the attributes of specific entity components inside the model, such as key information like stair passages.
- 4.
- The topology of the floor grid after meshing the BIM model is displayed in the whole interface, and the optimal path planning diagram from the starting position to the target position is shown. Set the starting point and target point, the blue circle indicates the starting position, the red circle indicates the target position, the green indicates the planned path, and the red column indicates the channel between floors. The experimental results of single-floor path planning are shown in Figure 15 and the experimental results of multi-floor path planning are shown in Figure 16. This experiment proves the correctness and feasibility of the path planning analysis method based on GeoSOT and BIM, and also proves the correctness and feasibility of the GeoSOT-A* algorithm designed in this paper.
4. Discussion
- From the experimental results shown in Figure 12 and Figure 13, it can be concluded that it is indeed feasible to apply GIS technology-related ideas to the BIM model. Indeed, the method fuses the GeoSOT grids with real geographic information and building information models and enables indoor path planning. For these results, the GeoSOT grid makes up for the deficiency of the BIM model having all the attribute information of the indoor building and lacking the real geographical location attribute.
- From the experimental results in Figure 14, it can be concluded that the method does accurately generate the indoor grid topology map, and if one of the grids is selected, the coordinates and attribute information corresponding to the BIM model contained in the grid can also be consulted. This is because the BIM model has complete information about the building, which can accurately express the relative position of the components in the building, and the GeoSOT grid is multi-level and multi-scale, with an accuracy at the centimeter level, which can accurately express the real geographic space position.
- From the results in Figure 15 and Figure 16, it can be obtained that the indoor path planning algorithm (GeoSOT-A* algorithm), based on the spatial relationships proposed in this paper, can reasonably identify and avoid the edges of indoor floor obstacles and realize the optimal path planning of indoor continuous space across floors.
- This method is widely used and has strong scalability. The BIM model of Guanlan Commercial Street in Baiyin City was selected as the method application object, and the BIM model is processed by GeoSOT global meshing to generate the indoor mesh topology map. Then, based on the pathfinding algorithm, the precise planning of the indoor path is realized. The result analysis shows the method proposed in this paper has certain application value and significance for meeting the location information service requirements of indoor space in smart city construction.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xiong, Q.; Zhu, Q.; Zlatanova, S.; Du, Z.; Zhang, Y.; Zeng, L. Multi-level indoor path planning method. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 19–23. [Google Scholar] [CrossRef] [Green Version]
- Weijs-Perrée, M.; Dane, G.; van den Berg, P.; van Dorst, M.J. A multi-level path analysis of the relationships between the momentary experience characteristics, satisfaction with urban public spaces, and momentary- and long-term subjective wellbeing. Int. J. Environ. Res. Public Health 2019, 16, 3621. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, M.; Wei, S.; Zlatanova, S.; Zhang, R. bim-based indoor path planning considering obstacles. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 4, 417–423. [Google Scholar] [CrossRef] [Green Version]
- Li, H. Evaluation of Multi-Level Cognitive Maps for Supporting between-Floor Spatial Behavior in Complex Indoor Environments; ProQuest Dissertations Publishing: Ann Arbor, MI, USA, 2016. [Google Scholar]
- Changdon, K.; Doohee, Y.; Haeyoung, J. Precise calibration method of pseudolite positions in indoor navigation systems. Comput. Math. Appl. 2003, 46, 1711–1724. [Google Scholar]
- Yang, L.; Worboys, M. Generation of navigation graphs for indoor space. Int. J. Geogr. Inf. Sci. 2015, 29, 1737–1756. [Google Scholar] [CrossRef]
- Savu, T.; Jugravu, B.A. Indoor path planning and obstacle avoidance simulation. IOP Conf. Series. Mater. Sci. Eng. 2019, 682, 12019. [Google Scholar] [CrossRef] [Green Version]
- Li, F.; Zlatanova, S.; Koopman, M.; Bai, X.; Diakité, A. Universal path planning for an indoor drone. Autom. Constr. 2018, 95, 275–283. [Google Scholar] [CrossRef]
- Sun, N.; Yang, E.; Corney, J.; Chen, Y. Semantic path planning for indoor navigation and household tasks. In Annual Conference towards Autonomous Robotic Systems; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; pp. 191–201. [Google Scholar]
- Wallgrun, J.O. Autonomous construction of hierachical voronoi-based route graph representations. In International Conference on Spatial Cognition; Springer: Berlin/Heidelberg, Germany, 2005; pp. 413–433. [Google Scholar]
- Hamieh, H.; Dominique, D.; Christian, T. BiMov: BIM-Based Indoor Path Planning. In Advances on Mechanics, Design Engineering and Manufacturing; Springer: Berlin/Heidelberg, Germany, 2017; pp. 889–899. [Google Scholar]
- Li, X.; Claramunt, C.; Ray, C. A grid graph-based model for the analysis of 2D indoor spaces. Comput. Environ. Urban Syst. 2010, 34, 532–540. [Google Scholar] [CrossRef]
- Lin, Y.H.; Liu, Y.S.; Gao, G. The IFC-based path planning for 3D indoor spaces. Adv. Eng. Inform. 2013, 27, 189–205. [Google Scholar] [CrossRef] [Green Version]
- Isikdag, U.; Zlatanova, S.; Underwood, J. A BIM-Oriented Model for supporting indoor navigation requirements. Comput. Environ. Urban Syst. 2013, 41, 112–123. [Google Scholar] [CrossRef]
- Bilal, M.; Oyedele, L.O.; Qadir, J. Analysis of critical features and evaluation of BIM software: Towards a plug-in for construction waste minimization using big data. Int. J. Sustain. Build. Technol. Urban Dev. 2015, 6, 211–228. [Google Scholar] [CrossRef]
- Liu, X.; He, C.; Zhao, H.; Jia, J.; Liu, C. Building information modeling indoor path planning: A lightweight approach for complex BIM building. Comput. Animat. Virtual Worlds 2021, 32, e2014. [Google Scholar] [CrossRef]
- El-Mekawy, M.; Ostman, A. Semantic mapping: An ontology engineering method for integrating building models in IFC and CityGML. In Proceedings of the 3rd ISDE Digital Earth Summit, Nessebar, Bulgaria, 12–14 June 2010. [Google Scholar]
- Karimi, H.A.; Akinci, B. CAD and GIS Integration, 1st ed.; Karimi, H.A., Akinci, B., Eds.; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- ElMeouche, R.; Rezoug, M.; Hijazi, I. Integrating and managing BIM in GIS, software review. In Proceedings of the ISPRS 8th 3DGeoInfo Conference & WG II/2 Workshop, Istanbul, Turkey, 27–29 November 2013. [Google Scholar]
- Meng, L.; Cheng, C.Q.; Chen, D. Terrain Quantization Model Based on Global Subdivision Grid. Acta Geod. Et Cartogr. Sin. 2016, 45, 152–158. [Google Scholar]
- Cheng, C.Q. An Introduce to Spatial Information Subdivision Organization; Science Press: Beijing, China, 2012. [Google Scholar]
- Cheng, C.Q.; Zheng, C.X. A method for unifying existing latitude and longitude grids. ISPRS Int. J. Geo-Inf. 2012, 5, 161. [Google Scholar] [CrossRef]
- Lu, N.; Cheng, C.Q.; Yang, B.Y. Distribution data preprocessing and preparation method based on global subdivision model. Geogr. Geo-Inf. Sci. 2013, 29, 56–59. [Google Scholar]
- Yuan, J. Administrative Division Code Model Based on GeoSOT Grid; School of Earth and Space Sciences, Peking University: Beijing, China, 2017. [Google Scholar]
- Cheng, C.Q.; Tong, X.C.; Chen, B.; Zhai, W.X. A Subdivision Method to Unify the Existing Latitude and Longitude Grids. ISPRS Int. J. Geo-Inf. 2016, 5, 161. [Google Scholar] [CrossRef]
- Hu, X.G.; Cheng, C.Q.; Tong, X.C. Research on 3D data representation based on GeoSOT-3D. J. Peking Univ. 2015, 51, 1022–1028. [Google Scholar]
- Penttila, H. Describing the Changes in Architectural Information Technology to Understand Design Complexity and Free-form Architectural Expression. J. Inf. Technol. Constr. 2006, 11, 395–408. [Google Scholar]
- Wang, X.; Love, P.E. BIM+ AR: Onsite information sharing and communication via advanced visualization. In Proceedings of the 2012 IEEE 16th International Conference on Computer Supported Cooperative Work in Design (CSCWD), Wuhan, China, 23–25 May 2012; pp. 850–855. [Google Scholar]
- Dossick, C.S.; Neff, G. Organizational divisions in BIM-enabled commercial construction. J. Constr. Eng. Manag. 2009, 136, 459–467. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Truijens, M.; Hou, L.; Wang, Y.; Zhou, Y. Integrating augmented reality with building information modeling: Onsite construction process controlling for liquefied natural gas industry. Autom. Constr. 2014, 40, 96–105. [Google Scholar] [CrossRef]
- Taylor, J.E.; Bernstein, P.G. Paradigm trajectories of building information modeling practice in project networks. J. Manag. Eng. 2009, 25, 69–76. [Google Scholar] [CrossRef]
- Li, L. Research on Integrated Management of Construction Project Text Information Based on BIM; Dalian University of Technology: Dalian, China, 2015. [Google Scholar]
- BIM Research Group of Tsinghua University. Research on the Standard Framework of Building Information Modeling in China; China Architecture and Construction Press: Beijing, China, 2011. [Google Scholar]
- IFC++. Available online: http://www.ifcquery.com/ (accessed on 1 January 2022).
- Lin, W.Y.; Lin, P.H. Intelligent generation of indoor topology (i-GIT) for human indoor pathfinding based on IFC models and 3D GIS technology. Autom. Constr. 2018, 94, 340–359. [Google Scholar] [CrossRef]
- Donkers, S.; Ledoux, H.; Zhao, J.; Stoter, J. Automatic conversion of IFC datasets to geometrically and semantically correct CityGML LOD3 buildings: Automatic conversion of IFC datasets to CityGML LOD3 buildings. Trans. GIS 2016, 20, 547–569. [Google Scholar] [CrossRef] [Green Version]
- Zhou, H.B.; Shi, W.P.; Deng, X.Y. Research on BIM Component Library Based on IFC Standard. J. Graph. 2017, 38, 589–595. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Taneja, S.; Akinci, B.; Garrett, J.H. Algorithms for automated generation of navigation models from building information models to support indoor map-matching. Autom. Constr. 2016, 61, 24–41. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.B.; Mei, Y.S.; Yu, J.Q.; Su, X.L.; Xu, N. Three-dimensional unmanned aerial vehicle path planning using modified wolf pack search algorithm. Neurocomputing 2017, 266, 445–457. [Google Scholar]
- Wang, Z.; Cai, J. The path-planning in radioactive environment of nuclear facilities using an improved particle swarm optimization algorithm. Nucl. Eng. Des. 2018, 326, 79–86. [Google Scholar] [CrossRef]
- Sagar, M.; Miranda, J.; Dhawan, V.; Dharmaraj, S. The Growing Trend of Cityscale Digital Twins around the World. 2020. Available online: https://opengovasia.com/the-growing-trend-of-city-scale-digital-twins-around-the-world/ (accessed on 1 January 2022).
- Ketzler, B.; Naserentin, V.; Latino, F. Digital twins for cities: A state of the art review. Built Environ. 2020, 46, 547–573. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Grid Size | Approximate Size Near the Equator |
|---|---|---|
| 1 | - | |
| 2 | - | |
| 3 | - | |
| 4 | - | |
| 5 | - | |
| 6 | 1024 km | |
| 7 | 512 km | |
| 8 | 256 km | |
| 9 | 128 km | |
| 10 | 64 km | |
| 11 | 32 km | |
| 12 | 16 km | |
| 13 | 8 km | |
| 14 | 4 km | |
| 15 | 2 km | |
| 16 | 1 km | |
| 17 | 512 m | |
| 18 | 256 m | |
| 19 | 128 m | |
| 20 | 64 m | |
| 21 | 32 m | |
| 22 | 16 m | |
| 23 | 8 m | |
| 24 | 4 m | |
| 25 | 2 m | |
| 26 | 1 m | |
| 27 | 0.5 m | |
| 28 | 25 cm | |
| 29 | 12.5 cm | |
| 30 | 6.2 cm | |
| 31 | 3.1 cm | |
| 32 | 1.5 cm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Li, G. Precise Indoor Path Planning Based on Hybrid Model of GeoSOT and BIM. ISPRS Int. J. Geo-Inf. 2022, 11, 243. https://doi.org/10.3390/ijgi11040243
Zhang H, Li G. Precise Indoor Path Planning Based on Hybrid Model of GeoSOT and BIM. ISPRS International Journal of Geo-Information. 2022; 11(4):243. https://doi.org/10.3390/ijgi11040243
Chicago/Turabian StyleZhang, Huangchuang, and Ge Li. 2022. "Precise Indoor Path Planning Based on Hybrid Model of GeoSOT and BIM" ISPRS International Journal of Geo-Information 11, no. 4: 243. https://doi.org/10.3390/ijgi11040243
APA StyleZhang, H., & Li, G. (2022). Precise Indoor Path Planning Based on Hybrid Model of GeoSOT and BIM. ISPRS International Journal of Geo-Information, 11(4), 243. https://doi.org/10.3390/ijgi11040243