The evaluation of a feature’s shape preservation degree in cartographic generalization requires a measure for assessing the difference between a feature’s initial shape and its shape after the application of this particular transformation. Shape matching deals with shape transformation and measurement of its similarity with the initial one, using a specific measure [
14]. In the technical specifications of the basic quality measures of the AGENT system (IGN) [
15], a feature’s shape is defined as its geometric form. Likewise, [
14] uses the term shape for a geometrical pattern consisting of a set of points, curves, surfaces, etc. Considering these definitions and the fact that simplification algorithms and displacement as a result of generalization operate on a feature’s geometric properties, the assessment of the feature’s shape preservation in relation to its initial shape evolves through the use of a shape-matching technique. Additional measures regarding the evaluation of its legibility, horizontal accuracy, and topological accuracy contribute to the integrity of the process. Therefore, the identification of a measure assessing the degree of the feature’s shape preservation is based on the following three elements: (a) the quantified parametric description of the feature’s shape using a description or representation technique; (b) the application of a shape-matching technique that uses a similarity measure to evaluate possible dissimilarity through the computation of a distance, which implies that a short distance means minor dissimilarity [
14]; and (c) legibility measures (minimum distances between vertices, identification of ‘bottleneck’ phenomenon and sharp corners), horizontal accuracy, and topological consistency measures (identification of self-intersections and self-overlaps).
2.1. Shape Description and Representation Techniques
A description of a shape of a linear or area feature can be achieved through the mathematical representation of its geometric form or pattern, considering the above-mentioned definition of shape. In the technical specifications of the basic quality measures of the AGENT system (IGN) [
15], linear and polygonal shape measures based on past research are summarized in groups regarding size, sinuosity/complexity, elongation/eccentricity, compactness, and other special factors (
Table 1). Another parameterization approach for line shape description with three variables (the average magnitude angularity at different vertex ranges, the error variance, and the ratio of line length to anchor line length) was proposed by [
16]. This work compares the shape measures proposed by [
17,
18].
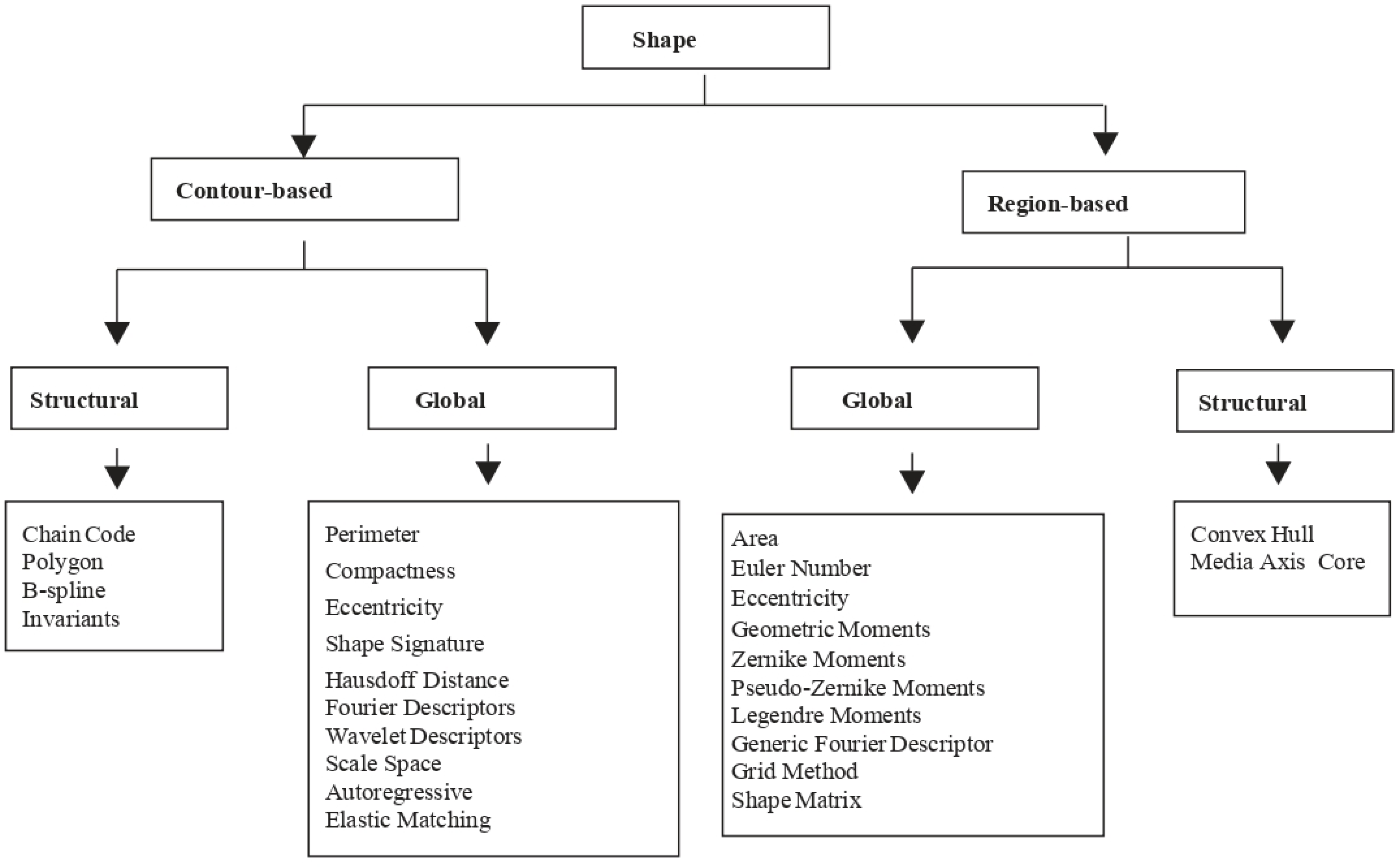
The following general categories and subcategories of shape description and representation techniques are suggested by [
19]: (a) contour-based methods (global/structural) and (b) region-based methods (global/structural) (
Figure 1).
In this work, aiming to identify an appropriate measure for the assessment of a line’s shape preservation degree, contour-based global methods (methods based on a feature’s “silhouette” that treat shape as a whole) are examined. Structural methods are not examined because of their computational complexity, complex matching, and failure to capture the global feature’s shape due to requiring the breakdown of the feature into segments (primitives) [
19]. In the following section, the examined shape description and representation approaches are presented as part of the shape-matching methodologies.
2.2. Similarity Measures
The shape matching problem is considered to be twofold [
14]: (a) the dissimilarity computation of two geometrical patterns (computation problem) and (b) the dissimilarity comparison using a threshold (decision/optimization problem). Furthermore, [
14] refers to the following similarity measures that treat shape as a whole: discrete metric, Minkowski Lp, bottleneck distance, Hausdorff distance, Fréchet distance, turning function distance, nonlinear elastic matching distance, reflection distance, area of symmetric difference/template metric, and transport earth mover’s distance. This work focuses on the first component of the problem and examines the following shape-matching methods with the corresponding shape description or representation techniques and similarity measures: (a) Hausdorff distance, (b) modified Hausdorff distance, (c) discrete Fréchet distance, (d) turning function distance, and (e) distance between Fourier descriptors. Two basic criteria for the assessment of the examined similarity measures suitability are set: (a) any change in a feature’s spatial information (e.g., number of vertices) must correspond to a change in the value of the similarity measure, and (b) spatial information reduction is considered as shape distortion; therefore, an increase in the value of the similarity measure is expected, implying dissimilarity [
14]. At this point, it must be clarified that the results regarding the similarity measures’ suitability are discussed in the framework of the assessment of the generalized feature shape, which, in most cases, is to a certain extent differentiated provided that the aims of generalization algorithms include the preservation of the feature shape. Therefore, the examined similarity measures which fail to follow the previously set criteria are not considered suitable for implementation in the generalization process. This does not imply, in general, a lack of their suitability to capture the features’ shape in cases where the shapes of two completely different features are examined.
In the following sections, the examined similarity measures are briefly described along with the representation techniques to be applied. Douglas–Peucker simplification algorithm for lines and polygons was chosen for testing the similarity measures as it can induce slight to great morphological distortions according to the set tolerance. Generalization was applied on a sample of 50 lines of 50 km each and 50 polygons (2.4–262 km2). These features are included in the EuroRegional Map database at scale 1:250,000. Douglas–Peucker simplification algorithm tolerance was set in the interval [20 m, 1000 m] per 20 m of length for the production of generalized features at scales 1:500,000 and 1:1,000,000. In addition, the bend simplification algorithm was applied for testing only the prevailed shape measures. Based on the function of the Douglas–Peucker simplification algorithm, one more criterion for the assessment of the examined similarity measures suitability was set: a quantitative increase in the values of the similarity measures is to be expected as the algorithm tolerance increases following the feature’s spatial information reduction (vertices). ESRI’s Douglas–Peucker simplification algorithm and bend simplification algorithm were implemented. The examined shape representation methods (turning function and line and polygon representation for Fourier transform) and the similarity measures (Hausdorff distance, modified Hausdorff distance, discrete Fréchet distance, turning function distance, Fourier descriptors distance) were implemented in Python programming language. Fourier descriptors were calculated using Inverse Fast Fourier Transform function in the Scipy Python module. The Shapely Python module was also used for buffering, area calculations, and examination of topological relationships.
2.2.1. Hausdorff Distance
Hausdorff distance between two sets of points A and B is defined as the smallest value d such that every point of A has a point of B within distance d and every point of B has a point of A within distance d [
20].
This specific measure was rejected because it is not able to capture slight changes in feature shape since coarse grouping is created, as it is derived from
Table 2.
2.2.2. Modified Hausdorff Distance
Other researchers have examined various alternatives to the Hausdorff distance [
21], concluding that the following mathematical expression of the Hausdorff distance (modified Hausdorff distance) is a more suitable shape similarity measure. The modified Hausdorff distance between lines A and B is defined as follows:
, the distance between the set of points on line A and the set of points on line B
, the distance between the set of points on line B and the set of points on line A
Na, Νβ = the number of points in each set of points on lines A and B
the minimum Euclidean distance between point a on line A and the set of points on line B
the minimum Euclidean distance between point b on line B and the set of points on line A
This specific measure was accepted as a similarity measure because of its property of following shape line changes: (a) it changes when line spatial information (line vertices) change, and (b) it increases following line shape distortion when the tolerance value increases (
Table 3).
2.2.3. Discrete Fréchet Distance
The Fréchet distance between two curves f:[α,α′}, g:[b,b′] is described by the following function [
22]:
, where a, β range over continuous and increasing functions with α(0) = α, α(1) = α′, β(0) = b, β(1) = b′.
An alternative of Fréchet distance, the discrete Fréchet distance, is described as coupling distance [
23]. Its computation includes the examination of all coupling distances between the end points of line segments of the polygonal curves, with the restriction that the backward computation is prohibited. Mathematically, the discrete Fréchet distance is described as follows:
where P, Q are the polygonal curves and ||L|| is the length of the longest link in the coupling L.
Discrete Fréchet distance computation between two polygonal curves P (p0,…pm), Q(q0,….qn) is based on the creation of an array ca (nxm), with distances calculated between polygonal curves vertices as in the following algorithm:
i,j = 0 → ca(c00) = d(p0,q0), the Euclidean distance between vertices p0,q0.
i = 0 and j ϵ [1,n] → ca(c0,j) = max{d(p0,qj),ca(c0,j−1)}
i ϵ [1,m] and j = 0 → ca(ci,0) = max{d(pi,q0),ca(ci−1,0)}
i ϵ [1,m], j ϵ [1,n] → ca(ci,j) = max(d(pi,qj), min{ca(ci−1,0), ca(c0,j−1), ca(ci−1,j−1)})
The discrete Fréchet distance is the value in the lower right corner of the array ca (cell number nm) [
24].
The numerical results of the discrete Fréchet distance application indicate its increasing tendency in relation to an increase in tolerance value of the generalization algorithm. However, coarse grouping occurs when slight differences in feature shape appear (
Table 4). Therefore, this specific measure was rejected as it is not suitable for expressing completely the degree of the feature’s shape change.
2.2.4. Turning Function Distance
A similarity measure is introduced by [
25] as the area between the turning functions of the shapes of the lines under consideration. On the x-axis, the normalized feature length [0,1] is set, and on the y-axis, the counterclockwise cumulative angle of the tangent at each feature vertex is set. As shown in (
Table 5), the values of this specific measure present fluctuations, and they do not increase when spatial information (number of vertices) decreases, so the measure cannot be considered as a useful one.
2.2.5. Turning Function Distance as Length Difference
This measure is introduced as a new shape measure. The lengths of the examined features (original/generalized) turning functions are computed and weighted with the ratio of numbers of vertices of the generalized feature to the number of vertices of the original feature.
Ltf x (Ng/No),
No, Ng = the number of vertices of the original, generalized lines,
Ltf = the turning function length.
This specific measure was accepted as a similarity measure because of its suitability for following shape line changes as it increases following line shape distortion when the tolerance value increases (
Table 6).
2.2.6. Fourier Descriptor Distances
Four shape representation techniques are examined in order to compute Fourier descriptors. Each generalized feature is represented as a vector. Matching features should retain the same number of vertices, so densification of features is required.
For lines: , t ∈ [0, M], where M is the number of vertices
For polygons [
23,
24,
25,
26]:
t ∈ [0, M − 1], where M is the number of vertices
The cumulative angular function proposed by [
30] as modified by [
31] is applicable to lines and polygons as shown in
Figure 2:
,
is the difference between the external angle θ(t) and the initial angle θ(0) with the x-axis at each vertex t, t ∈ (0, M − 1), where M is the number of vertices.
The complex-valued exponential function of the total curvature of the curve [
32] is applicable to lines as shown in
Figure 3:
, j ∈ [0, M − 1], where M is the number of vertices
θ(j)
θ(j) is the external angle, a(0) is the initial angle with the x-axis at each vertex j, j ∈ (0, M − 1), and M is the number of vertices.
Centroid distance [
29,
33] is applicable to polygons:
,
Fourier descriptors are calculated by using inverse Fourier transform. To ensure the independence of the measures in relation to the shift, only the magnitude of the produced coefficients is retained [
29]:
Coefficients based on the complex coordinate representation technique and on centroid distance are normalized to ensure scale independence as follows [
29,
33,
34,
35]:
Complex coordinates: , n ϵ [0, N − 1]
Centroid distance: , n ϵ [0, N −1]
Distances between Fourier coefficients are calculated as Euclidean distances. In the following tables (
Table 7 and
Table 8), a sample of the results of the applied description techniques and coefficients calculations is shown. The values of the specific measure present fluctuations, and they do not increase when spatial information (number of line vertices) decreases. Considering this along with the densification requirement for the computation of the measure, we consider this specific measure as not useful.
2.4. Horizontal Accuracy Measure
Considering that the error distribution along the line is uniform, only the measures regarding the full line shape are examined in order to identify a suitable measure for horizontal accuracy. Hence, the approaches which examine vertices’ horizontal displacement are overlooked, like the stochastic approach of least squares provided by the ISO 19157 standard [
36] for spatial data quality, which analyses vertices’ positional error. Three measures are examined with respect to features’ positional error: (a) the areal displacement [
37] as the quotient of the sum of the areas of the polygons formed between the initial and the generalized line to the length of the original line, (b) the vector displacement [
37] as the quotient of the sum of the perpendicular distances between the generalized and original line to the length of the original line, and (c) the percentage of the length of the generalized line laying outside the buffer zone of the original line [
38], which is finally adopted. In order to avoid conflicts between features, the horizontal accuracy acceptable conformance level is set according to the minimum accepted resolution (0.25 mm) at generalization scale, considering that the semantic generalization process has been implemented in a previous phase and legibility constraints between features are satisfied.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}