

A Vector Field Visualization Method for Trajectory Big Data
Abstract
:1. Introduction
- 1.
- Construction of a travel vector grid model: Through model construction, the expression of vehicle motion’s states, behavioral preferences, and geographical regions is augmented, thereby aiding in uncovering latent hotspot areas. This approach fosters a more comprehensive understanding of the characteristics inherent in extensive trajectory data.
- 2.
- WebGL-based vector field visualization rendering: This effectively showcases the vector field effect of vehicle motion. Compared to conventional visualization methods, this intuitive and dynamic rendering approach facilitates travelers’ rapid perception of the surrounding trajectory data’s mobility trends.
- 3.
- Validation of the practicality and effectiveness of the vector field visualization method in congestion analysis is further substantiated by designing an analysis method for congested hotspot regions.
- 4.
- Applying the vector field visualization concept to the domain of large trajectory data visualization has facilitated the successful realization of map-based visualization for traffic flow directions and density variations. Furthermore, this approach can forecast future traffic congestion scenarios, offering urban traffic management a more precise data reference and decision support.
2. Related Work
3. Materials
3.1. Study Area
3.2. Dataset
4. Methods
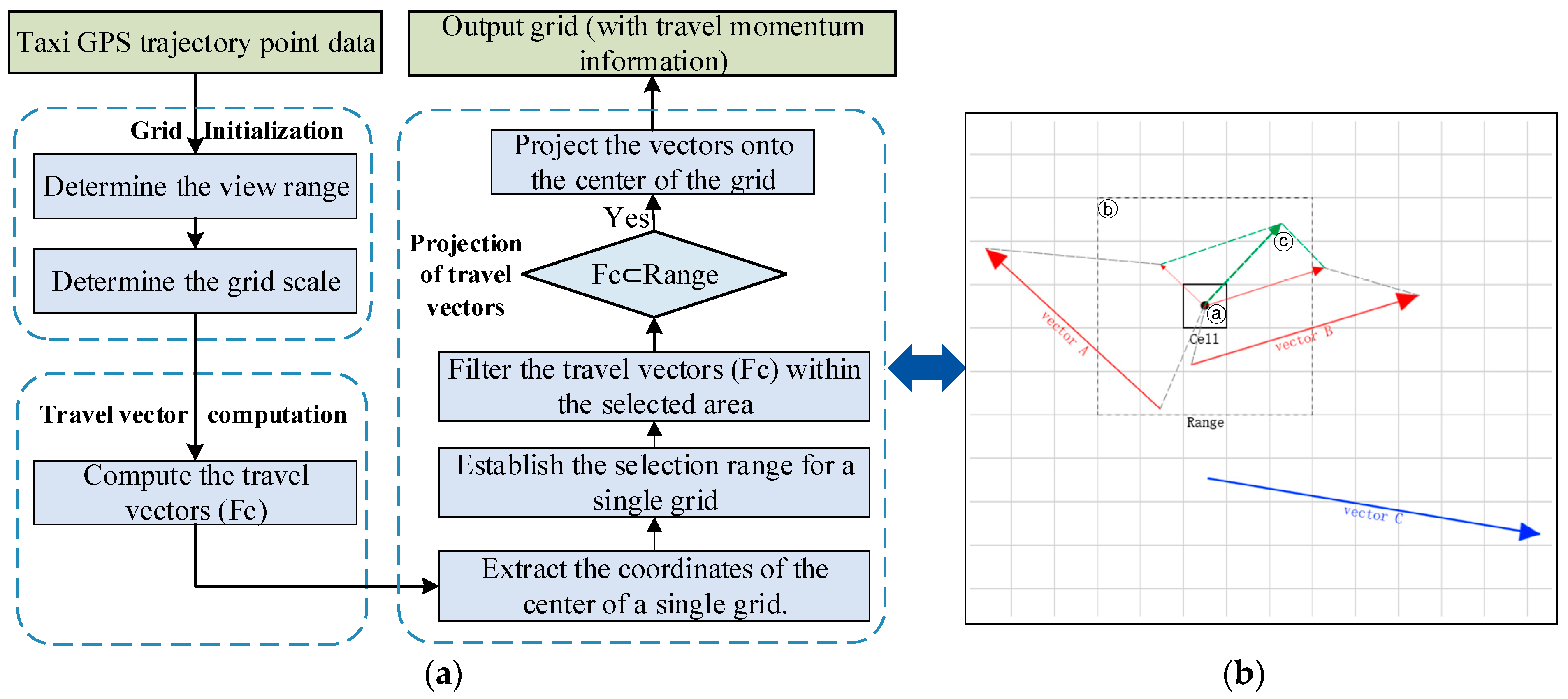
4.1. Construction of Travel Vector Grid
4.1.1. Grid Initialization
4.1.2. Travel Vector Computation
4.1.3. Projection of Travel Vectors
4.2. Vector Field Visualization Rendering
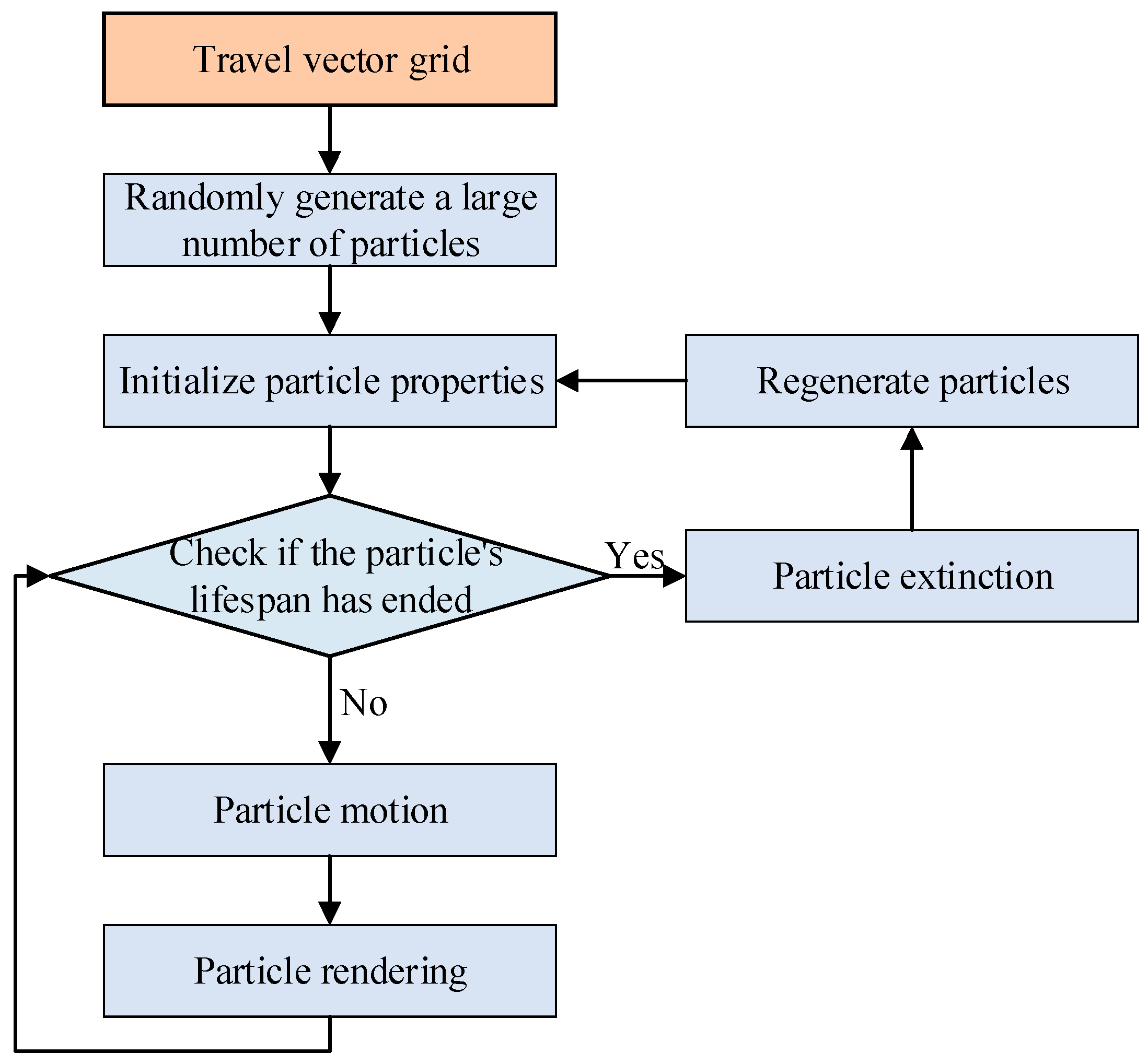
4.2.1. Particle Generation
4.2.2. Particle Initialization
- 1.
- Particle size and color: Due to the vector field data visualization based on WebGL in this study, particle size depends on the chosen primitives. Particle shapes can include points, lines, polygons, and spheres. In this study, point particles are selected to represent trajectory characteristics, allowing easy particle size adjustment. Additionally, the color of particle trajectories can reflect their velocity variations, which can be adjusted by setting RGBA values.
- 2.
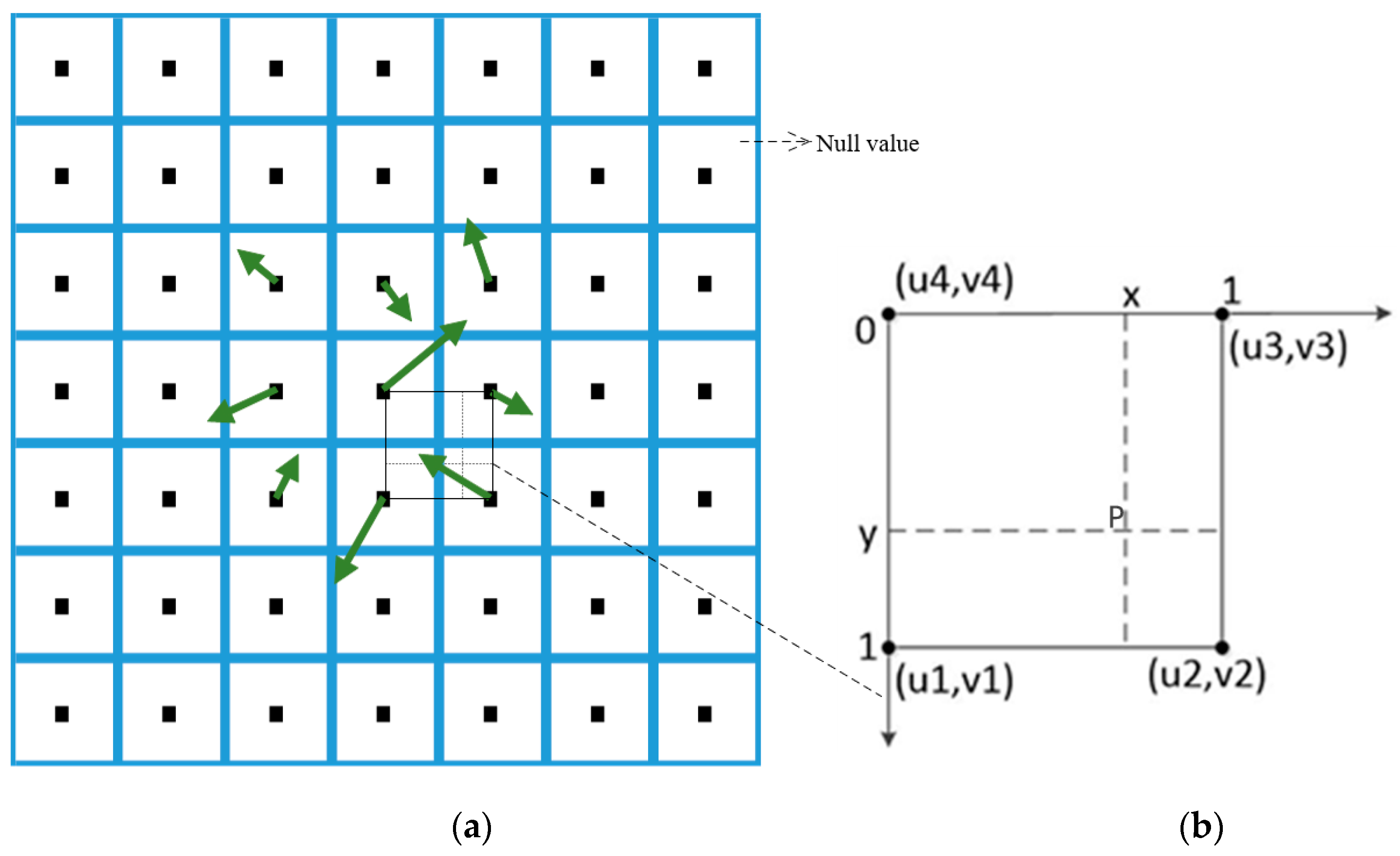
- The initial positions of particles are randomly set, as described in Section 4.2.1 above. The next frame’s position of each particle is determined based on its current position and velocity.
- 3.
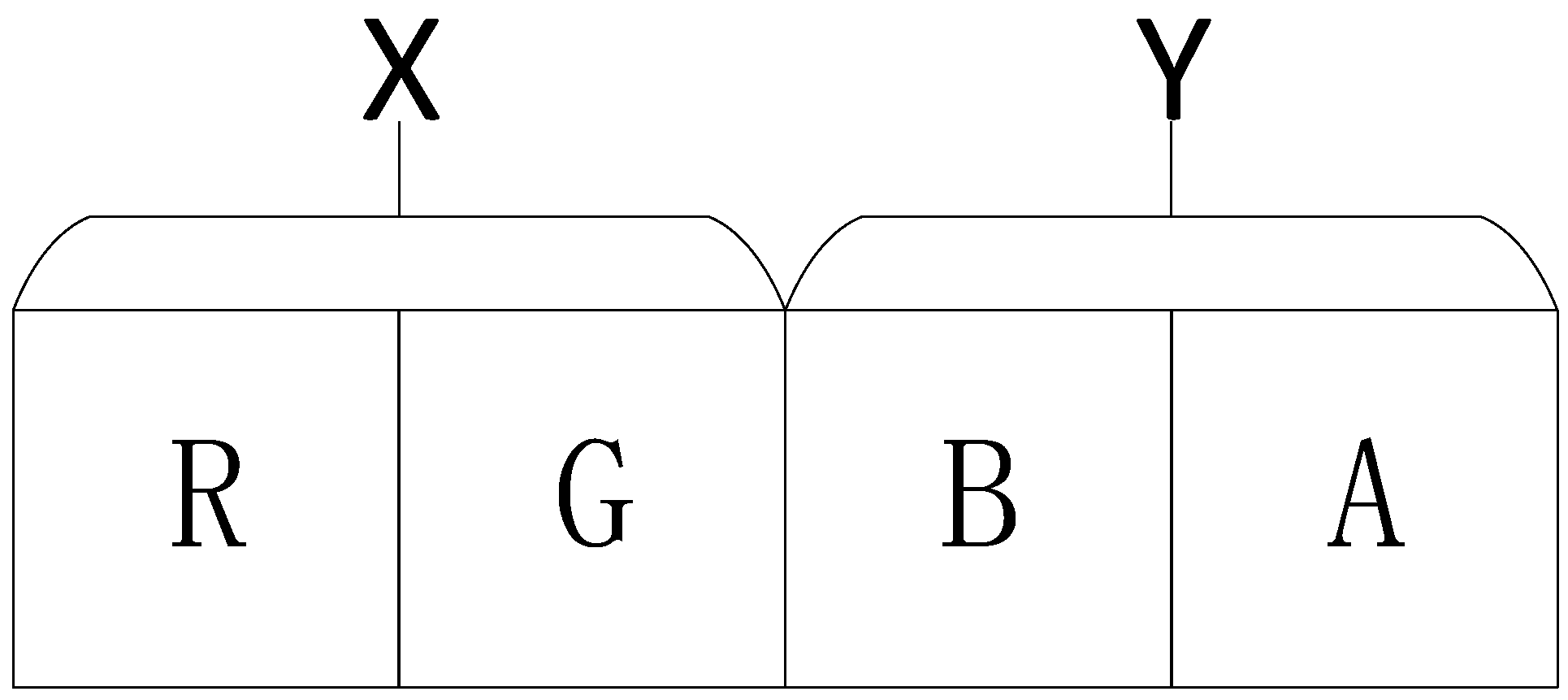
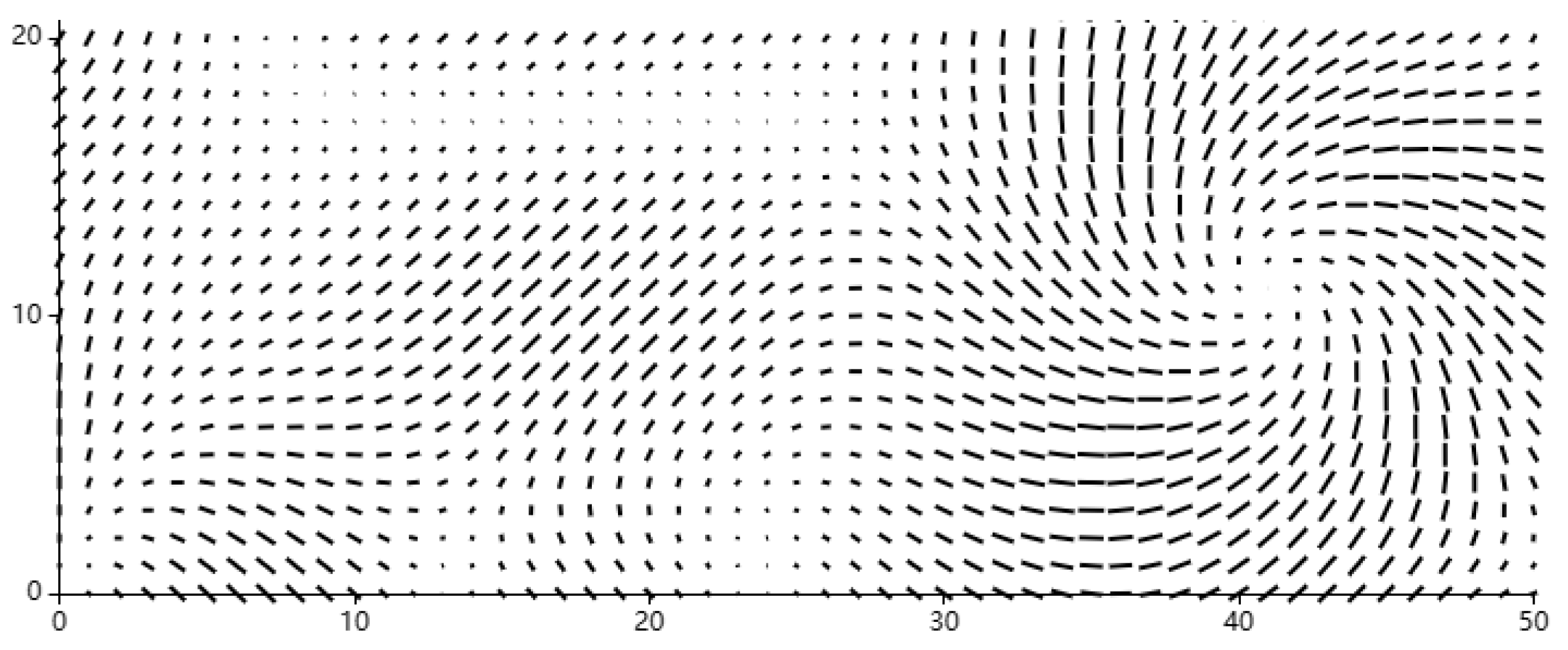
- The initial velocity of particles is determined by their initial position, with two components: horizontal (u) and vertical (v). Moreover, the magnitude of these components also determines the direction of particle motion. The generation process of the velocity texture is similar to that of the position texture, where the velocity is mapped into the texture using RGBA encoding. RG and BA components store the horizontal and vertical components, respectively. The velocity magnitude corresponding to a particle’s position is obtained from the velocity texture.
- 4.
- Particle lifecycle: The lifecycle of a particle determines its lifespan. In this study, the relationship between particle velocity and lifecycle addresses the uneven distribution of trajectory lines caused by fixed lifecycles.
4.2.3. Particle Motion
- 1.
- Calculation of particle velocities
- 2.
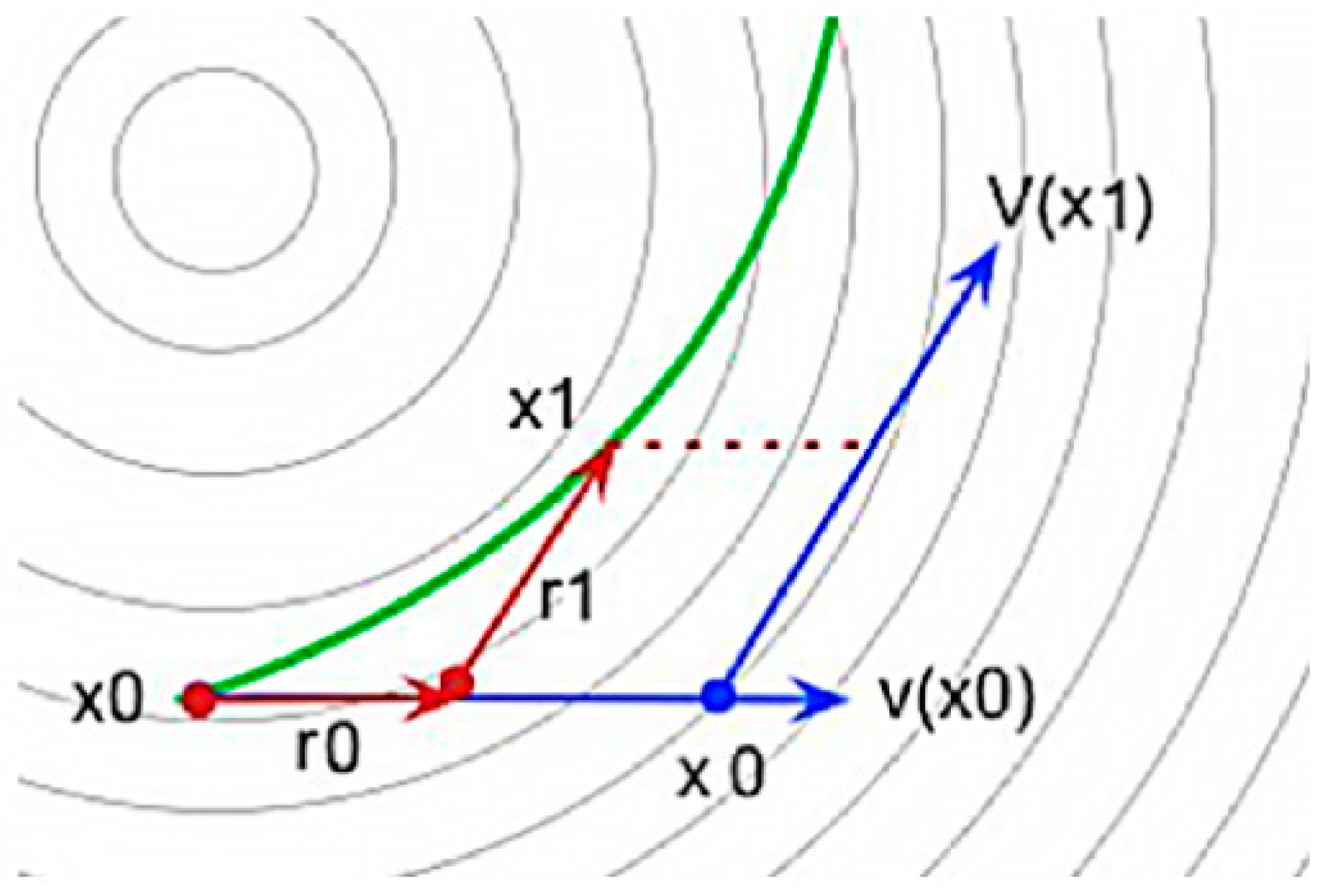
- Accurate calculation of particle positions
- 3.
- Particle Extinction
4.3. Congestion Analysis of Hotspots Areas
5. Results and Discussion
5.1. Construction of Travel Vector Grid
5.2. Visualization of Vector Fields
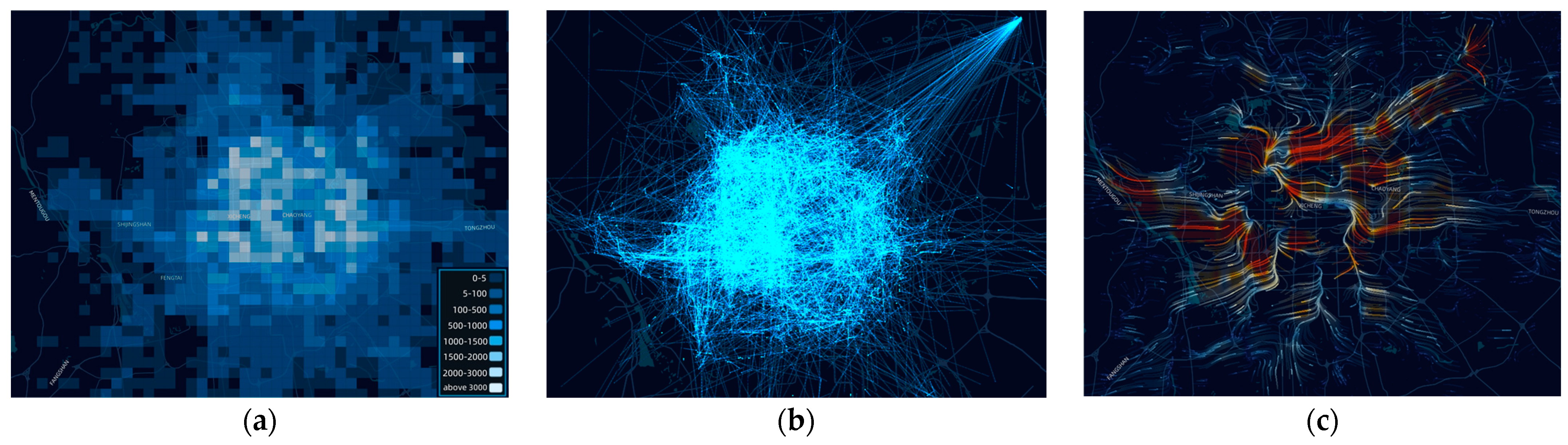
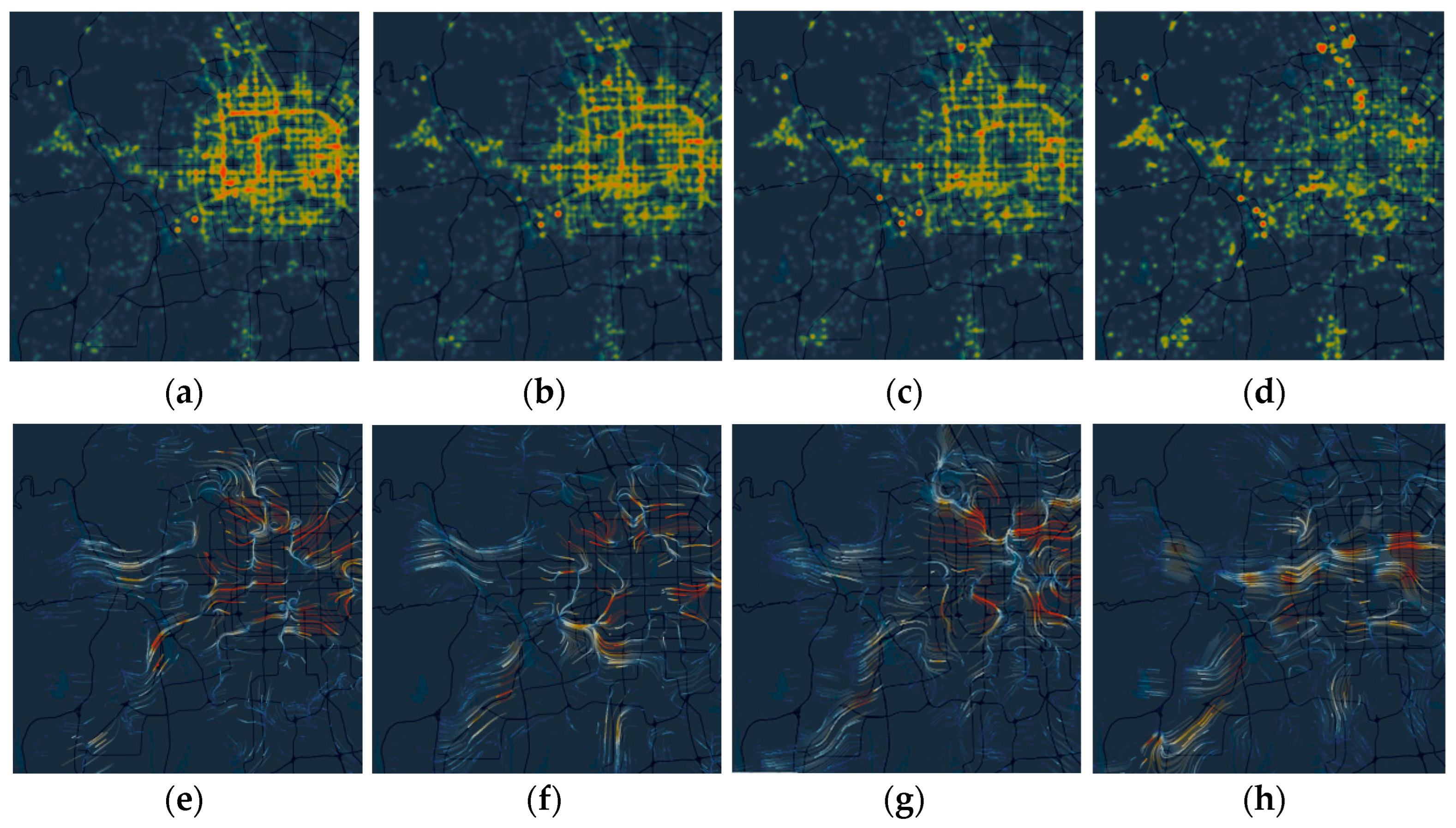
5.2.1. Results of Vector Field Visualization
5.2.2. Comparative Analysis of Vector Field Visualization
5.3. Congestion Analysis of Hotspots Areas
- 1.
- Transportation hubs: Development Zone Bus Station, Changling Bus Station, Beijing West Railway Station, Capital Airport.
- 2.
- Major intersections: intersection of West Third Ring North Road and auxiliary road, intersection of Jingkai West Road, intersection of Cangshang Street, and S201.
- 3.
- Commercial centers: Xidan Joy City, Financial and Business Street, Beijing State Mall, and Beijing CBD.
- 4.
- Tourist attractions: Fragrant Hills Park and Nanluoguxiang.
- 5.
- Congestion-prone road segments: from Madian Bridge to Deshengmen North Bridge, from Guomao Bridge to Jianguomen Bridge, from Yixing North Road to West Third Ring North Road, and from Dahuangtang Second Bridge to Longtanwan Bridge.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jing, C.; Zhou, W.; Qian, Y.; Zheng, Z.; Wang, J.; Yu, W. Trajectory big data reveals spatial disparity of healthcare accessibility at the residential neighborhood scale. Cities 2023, 133, 104127. [Google Scholar] [CrossRef]
- Qu, Z.; Wang, X.; Song, X.; Pan, Z.; Li, H. Location Optimization for Urban Taxi Stands Based on Taxi GPS Trajectory Big Data. IEEE Access 2019, 7, 62273–62283. [Google Scholar] [CrossRef]
- Zheng, Y. Trajectory Data Mining: An Overview. ACM Trans. Intell. Syst. Technol. 2015, 6, 29. [Google Scholar] [CrossRef]
- Zhu, L.; Yu, F.R.; Wang, Y.; Ning, B.; Tang, T. Big Data Analytics in Intelligent Transportation Systems: A Survey. IEEE Trans. Intell. Transp. Syst. 2019, 20, 383–398. [Google Scholar] [CrossRef]
- Li, W.; Zhu, J.; Fu, L.; Zhu, Q.; Xie, Y.; Hu, Y. An augmented representation method of debris flow scenes to improve public perception. Int. J. Geogr. Inf. Sci. 2021, 35, 1521–1544. [Google Scholar] [CrossRef]
- Zhang, W.; Xu, C. Exploring App-Based Taxi Movement Patterns from Large-Scale Geolocation Data. ISPRS Int. J. Geo-Inf. 2021, 10, 751. [Google Scholar] [CrossRef]
- Liu, C.K.; Qin, K.; Chen, K.; Ma, R. Uncovering the Aggregation Pattern of Gps Trajectory Based on Spatiotemporal Clustering and 3D Visualization. ISPRS—Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 42, 255–260. [Google Scholar] [CrossRef]
- Liu, H.; Chen, X.; Wang, Y.; Zhang, B.; Chen, Y.; Zhao, Y.; Zhou, F. Visualization and visual analysis of vessel trajectory data: A survey. Vis. Inform. 2021, 5, 1–10. [Google Scholar] [CrossRef]
- He, J.; Chen, H.; Chen, Y.; Tang, X.; Zou, Y. Variable-Based Spatiotemporal Trajectory Data Visualization Illustrated. IEEE Access 2019, 7, 143646–143672. [Google Scholar] [CrossRef]
- Chu, X.; Tan, X.; Zeng, W. A Clustering Ensemble Method of Aircraft Trajectory Based on the Similarity Matrix. Aerospace 2022, 9, 269. [Google Scholar] [CrossRef]
- Bai, X.; Xie, Z.; Xu, X.; Xiao, Y. An adaptive threshold fast DBSCAN algorithm with preserved trajectory feature points for vessel trajectory clustering. Ocean Eng. 2023, 280, 114930. [Google Scholar] [CrossRef]
- Hussain, S.A.; Hassan, M.U.; Nasar, W.; Ghorashi, S.; Jamjoom, M.M.; Abdel-Aty, A.H.; Parveen, A.; Hameed, I.A. Efficient Trajectory Clustering with Road Network Constraints Based on Spatiotemporal Buffering. ISPRS Int. J. Geo-Inf. 2023, 12, 117. [Google Scholar] [CrossRef]
- Gruendl, H.; Riehmann, P.; Pausch, Y.; Froehlich, B. Time-Series Plots Integrated in Parallel-Coordinates Displays. Comput. Graph. Forum 2016, 35, 321–330. [Google Scholar] [CrossRef]
- Zeng, W.; Fu, C.W.; Arisona, S.M.; Qu, H. Visualizing Interchange Patterns in Massive Movement Data. Comput. Graph. Forum 2013, 32, 271–280. [Google Scholar] [CrossRef]
- Pu, J.; Liu, S.; Ding, Y.; Qu, H.; Ni, L. T-Watcher: A New Visual Analytic System for Effective Traffic Surveillance. In Proceedings of the 2013 IEEE 14th International Conference on Mobile Data Management, Milan, Italy, 3–6 June 2013; pp. 127–136. [Google Scholar]
- Choi, Y.D.; Yun, H.J. Visualizing Electromagnetic Vector Fields in Matter using MATHEMATICA. Appl. Sci. Converg. Technol. 2019, 28, 66–78. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, X.; Yao, L.; Luo, F.; Pang, X. A Survey of Visualization Methods for Urban Spatial Hot Spots Analysis. J. Comput. -Aided Des. Comput. Graph. 2020, 32, 551–567. [Google Scholar]
- Jain, R.; Garg, S.; Gangal, S.; Thakur, M.K. TaxiScan: A scan statistics approach for detecting Taxi demand hotspots. In Proceedings of the 2019 Twelfth International Conference on Contemporary Computing (IC3), Noida, India, 8–10 August 2019; pp. 1–6. [Google Scholar]
- Zhou, B.; Ma, L.; Hu, J.; Wu, S.; He, G. Extraction of Urban Hotspots and Analysis of Spatial interaction Based on Trajectory Data Field: A Case Study of Shenzhen City. Trop. Geogr. 2019, 39, 117–124. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, J.; Guo, X.; Lu, J.; Lu, H. Cloud storage and heatmap generation method of trajectory big data. Bull. Surv. Mapp. 2021, 10, 146–149. [Google Scholar] [CrossRef]
- Lu, M.; Lai, C.; Ye, T.; Liang, J.; Yuan, X. Visual Analysis of Multiple Route Choices Based on General GPS Trajectories. IEEE Trans. Big Data 2017, 3, 234–247. [Google Scholar] [CrossRef]
- Tominski, C.; Schumann, H.; Andrienko, G.; Andrienko, N. Stacking-Based Visualization of Trajectory Attribute Data. IEEE Trans. Vis. Comput. Graph. 2012, 18, 2565–2574. [Google Scholar] [CrossRef]
- Pahins, C.A.L.; Ferreira, N.; Comba, J.L. Real-Time Exploration of Large Spatiotemporal Datasets Based on Order Statistics. IEEE Trans. Vis. Comput. Graph. 2020, 26, 3314–3326. [Google Scholar] [CrossRef]
- Itoh, M.; Yokoyama, D.; Toyoda, M.; Tomita, Y.; Kawamura, S.; Kitsuregawa, M. Visual Exploration of Changes in Passenger Flows and Tweets on Mega-City Metro Network. IEEE Trans. Big Data 2016, 2, 85–99. [Google Scholar] [CrossRef]
- Guo, D.; Zhu, X. Origin-Destination Flow Data Smoothing and Mapping. IEEE Trans. Vis. Comput. Graph. 2014, 20, 2043–2052. [Google Scholar] [CrossRef] [PubMed]
- Guo, X.; Xu, Z.; Zhang, J.; Lu, J.; Zhang, H. An OD Flow Clustering Method Based on Vector Constraints: A Case Study for Beijing Taxi Origin-Destination Data. ISPRS Int. J. Geo-Inf. 2020, 9, 128. [Google Scholar] [CrossRef]
- Zeng, W.; Shen, Q.; Jiang, Y.; Alexandru, T. Route-aware edge bundling for visualizing origin-destination trails in urban traffic. In Computer Graphics Forum; Wiley-Blackwell: Hoboken, NJ, USA, 2019; pp. 581–593. [Google Scholar]
- Yan, L.; Liu, X.; Chen, H.; Mangal, A.; Liu, K.; Chen, C.; Lim, B. OD Morphing: Balancing Simplicity with Faithfulness for OD Bundling. IEEE Comput. Soc. 2020, 26, 811–821. [Google Scholar]
- Liu, X.; Gong, L.; Gong, Y.; Liu, Y. Revealing travel patterns and city structure with taxi trip data. J. Transp. Geogr. 2015, 43, 78–90. [Google Scholar] [CrossRef]
- Liu, X.; Chow, J.Y.J.; Li, S. Online monitoring of local taxi travel momentum and congestion effects using projections of taxi GPS-based vector fields. J. Geogr. Syst. 2018, 20, 253–274. [Google Scholar] [CrossRef]
- Qin, X.; Fang, X.; Chen, L.; Zheng, H.; Ma, J.; Zhang, M. A Line Integral Convolution Method With Dynamically Determining Step Size and Interpolation Mode for Vector Field Visualization. IEEE Access 2019, 7, 19414–19422. [Google Scholar] [CrossRef]
- Tang, B.; Shi, H. Intelligent vector field visualization based on line integral convolution. Cogn. Syst. Res. 2018, 52, 828–842. [Google Scholar] [CrossRef]
- Liu, Z.; Cai, S.; Swan, J.E.; Moorhead, R.J.; Martin, J.P.; Jankun-Kelly, T.J. A 2D flow visualization user study using explicit flow synthesis and implicit task design. IEEE Trans. Vis. Comput. Graph. 2012, 18, 783–796. [Google Scholar] [CrossRef]
- Chu, L.; Ai, B.; Wen, Y.; Shi, Q.; Ma, H.; Feng, W. A Spatio-Temporal Dynamic Visualization Method of Time-Varying Wind Fields Based on Particle System. ISPRS Int. J. Geo-Inf. 2023, 12, 146. [Google Scholar] [CrossRef]
- Hin, A.J.S.; Post, F.H. Visualization of turbulent flow with particles. In Proceedings of the Proceedings Visualization ‘93, San Jose, CA, USA, 25–29 October 1993; pp. 46–52. [Google Scholar]
- Wei, X.; Kaufman, A.E.; Hallman, T.J. Case study: Visualization of particle track data. In Proceedings of the Visualization, VIS ’01, San Diego, CA, USA, 21–26 October 2001; pp. 465–590. [Google Scholar]
- Liu, H.; Fan, X.; Liu, J.; Liu, S. Smoothed Particle Hydrodynamics Fluid Simulation Method Based on Webgl. J. Chin. Comput. Syst. 2017, 38, 2406–2411. [Google Scholar]
- Fu, S.; Ai, B. Data Structure Design of Particle System for Global Surface Flow Visualization. Mar. Inf. 2019, 34, 19–22. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, Z.; Gao, S.; Zhang, L. Visualization of Ocean Data Vector Field Based on Streamline Distance Clustering. Comput. Sci. 2023, 50, 865–871. [Google Scholar]
- Wang, H.; Wu, T. New vector field microcosmic model for traffic flow. China J. Highw. T Ransport 2003, 16, 100–103. [Google Scholar] [CrossRef]
- Ma, W. Study on Characteristics and Improvement Measures of Traffic Congestion in Beijing. J. Munic. Technol. 2021, 39, 26–29. [Google Scholar] [CrossRef]
- Zhang, J.; Qiu, P.; Duan, Y.; Du, M.; Lu, F. A space-time visualization analysis method for taxi operation in Beijing. J. Vis. Lang. Comput. 2015, 31, 1–8. [Google Scholar]
- Fu, C.E.; Cheng, Q. Hierarchical Grid Division to Realize Cluster and Scatter Visualization of Massive Map Markers. Comput. Eng. Appl. 2023, 59, 245–251. [Google Scholar]
- Wang, S.; Jiang, Y.; Xu, X.; Bao, X. Grid division method of substation area based on clustering multi-dimensional data crossing and integration. Eng. J. Wuhan Univ. 2023, 56, 226–232. [Google Scholar] [CrossRef]
- Chen, H.; Li, X.; Ding, W. Twelve Kinds of Gridding Methods of Surfer 8.0 in Isoline Drawing. Chin. J. Eng. Geophys. 2007, 4, 52–57. [Google Scholar]
- Wang, S.; Li, W. Capturing the dance of the earth: PolarGlobe: Real-time scientific visualization of vector field data to support climate science. Comput. Environ. Urban Syst. 2019, 77, 101352. [Google Scholar] [CrossRef]
- Wang, S.; Chen, Y.; Wang, G. Vector Field Visualization of Digital Ocean System. J. Comput.-Aided Des. Comput. Graph. 2016, 28, 2114–2119. [Google Scholar]
- Huang, J.; Wang, Y.; Liu, J.; Ke, S. A Vector Field Trajectory Drawing Method Based on WebGL. Mod. Inf. Technol. 2023, 7, 92–95. [Google Scholar] [CrossRef]
- Ge, Y.; Lu, D. A survey on texture-based visualization methods for flow fields. J. Qufu Norm. Univ. Nat. Sci. 2020, 46, 77–84. [Google Scholar]
- Jing, C.; Zhang, H.; Xu, S.; Wang, M.; Zhuo, F.; Liu, S. A hierarchical spatial unit partitioning approach for fine-grained urban functional region identification. Trans. GIS 2022, 26, 2691–2715. [Google Scholar] [CrossRef]
- Dong, Z.; Zhou, Q.; Chen, S.; Hu, R.; Wang, Y.; Wu, Y. Evaluation Method of Urban Traffic Congestion Based on Trace. In Proceedings of the 9th Annual China Intelligent Transportation Conference 2014, Guangzhou, China, 8–11 October 2014; pp. 285–291. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Type | Data Format | Data Volume | Data Description | |
|---|---|---|---|---|
| Field Name | Field Meaning | |||
| Taxi Trajectory Data | txt | 10.5 G | CID | Vehicle ID |
| TIME | Time | |||
| LOG | Longitude | |||
| LAT | Latitude | |||
| SPEED | Instantaneous velocity | |||
| DIRECT | Instantaneous direction | |||
| AOI Boundary Data | shp | 25.6 M | AOI_ID | Area of interest ID |
| AOI_LOC | Coordinates the location of the AOI | |||
| AOI_NAME | Name of the AOI | |||
| Road Network Data | shp | 20.5 M | LENG | Road length |
| NAME | Road Name | |||
| Boundary Data of Different Districts | shp | 7.51 M | AREA_LOC | Regional Location |
| AREA_NAME | Region Name | |||
| Index | Field Name | Description | Example |
|---|---|---|---|
| 1 | CID | Vehicle ID | 13301104001 |
| 2 | LOG | Longitude | 116.3576202 |
| 3 | LAT | Latitude | 39.85883331 |
| 4 | V | Speed | 56.2 |
| 5 | DX | Longitude Change | 0.0065 |
| 6 | DY | Latitude Change | −0.3064 |
| Input: The data model for the travel vector grid. Output: Particle motion trajectories. | |
| 1 | Particle Generation Randomly generate a large number of particles within the range of the vector grid area. Use interpolation to calculate the velocity at the current position. Particle Update Based on the particle’s current velocity and time step, the particle’s next position is computed through integration. The particle’s velocity is calculated using interpolation based on the particle’s position. The particle’s visualization attributes, such as color and opacity, are updated based on changes in the particle’s position, velocity, and other properties. Particle Trajectory Recording Record the position information of the particles to form their trajectories, visualizing the particle’s motion as a series of connected line segments. Iterative Process Repeat steps 2 and 3 until the particle reaches the end of its lifecycle. |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 | |
| 8 | |
| 9 | |
| 10 | |
| 11 | |
| 12 | |
| 13 | |
| 14 | |
| 15 | |
| Congestion Index | Congestion Level |
|---|---|
| 1.00~1.50 | Unobstructed |
| 1.50~1.80 | Jogging |
| 1.80~2.00 | Congestion |
| greater than 2.00 | Severe congestion |
| Category | Category Phenomenon Description | Frequent Locations | Feature Trends |
|---|---|---|---|
| 1 | Normal flow trend | Road segments with normal traffic flow |  |
| 2 | Congestion trend in the region | Transportation hubs, tourist attractions, business centers, key intersections |  |
| 3 | Congestion trend on road segments | Congested urban road sections |  |
| Time | Vector Field Congestion Index | Traditional Congestion Index | Passenger Flow Index | Percentage Difference |
|---|---|---|---|---|
| 08:00 | 1.529 | 1.497 | 9.20 | −0.0213 |
| 09:00 | 1.521 | 1.482 | 9.24 | −0.0263 |
| 10:00 | 1.470 | 1.507 | 8.65 | +0.0245 |
| 11:00 | 1.438 | 1.477 | 8.58 | +0.0264 |
| 12:00 | 1.292 | 1.265 | 7.14 | −0.0213 |
| 13:00 | 1.379 | 1.356 | 7.67 | −0.0169 |
| 14:00 | 1.510 | 1.507 | 9.14 | −0.0019 |
| 15:00 | 1.527 | 1.488 | 8.02 | −0.0262 |
| 16:00 | 1.636 | 1.634 | 10.1 | −0.0012 |
| 17:00 | 1.732 | 1.731 | 11.8 | −0.0005 |
| 18:00 | 1.982 | 1.953 | 12.48 | −0.0148 |
| 19:00 | 1.582 | 1.621 | 10.6 | +0.0241 |
| 20:00 | 1.387 | 1.398 | 8.48 | +0.0078 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, A.; Xu, Z.; Zhang, J.; Li, T.; Cheng, X.; Hu, C. A Vector Field Visualization Method for Trajectory Big Data. ISPRS Int. J. Geo-Inf. 2023, 12, 398. https://doi.org/10.3390/ijgi12100398
Li A, Xu Z, Zhang J, Li T, Cheng X, Hu C. A Vector Field Visualization Method for Trajectory Big Data. ISPRS International Journal of Geo-Information. 2023; 12(10):398. https://doi.org/10.3390/ijgi12100398
Chicago/Turabian StyleLi, Aidi, Zhijie Xu, Jianqin Zhang, Taizeng Li, Xinyue Cheng, and Chaonan Hu. 2023. "A Vector Field Visualization Method for Trajectory Big Data" ISPRS International Journal of Geo-Information 12, no. 10: 398. https://doi.org/10.3390/ijgi12100398
APA StyleLi, A., Xu, Z., Zhang, J., Li, T., Cheng, X., & Hu, C. (2023). A Vector Field Visualization Method for Trajectory Big Data. ISPRS International Journal of Geo-Information, 12(10), 398. https://doi.org/10.3390/ijgi12100398