Road Intersection Detection through Finding Common Sub-Tracks between Pairwise GNSS Traces

Abstract
:1. Introduction
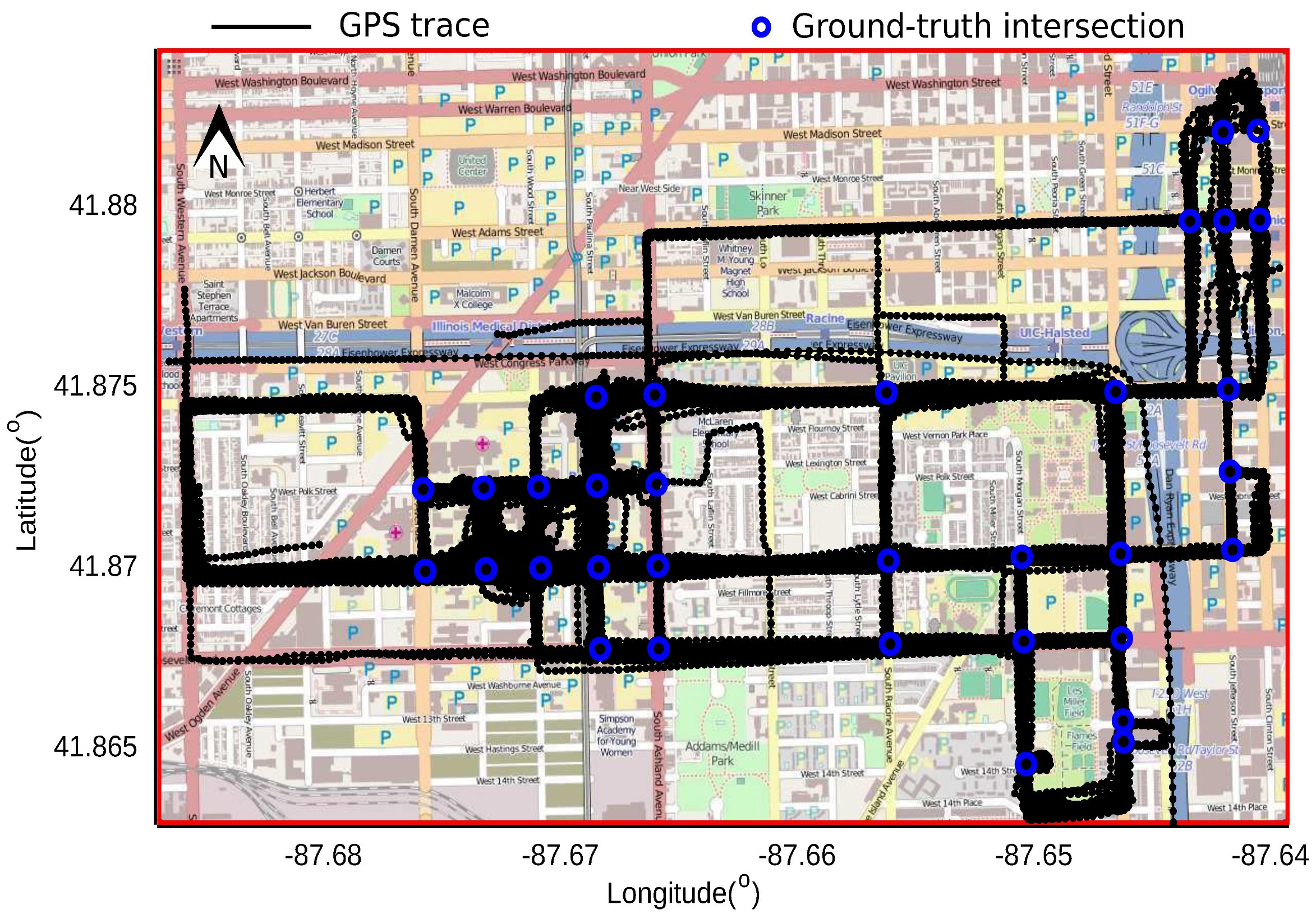
2. Problem Statement
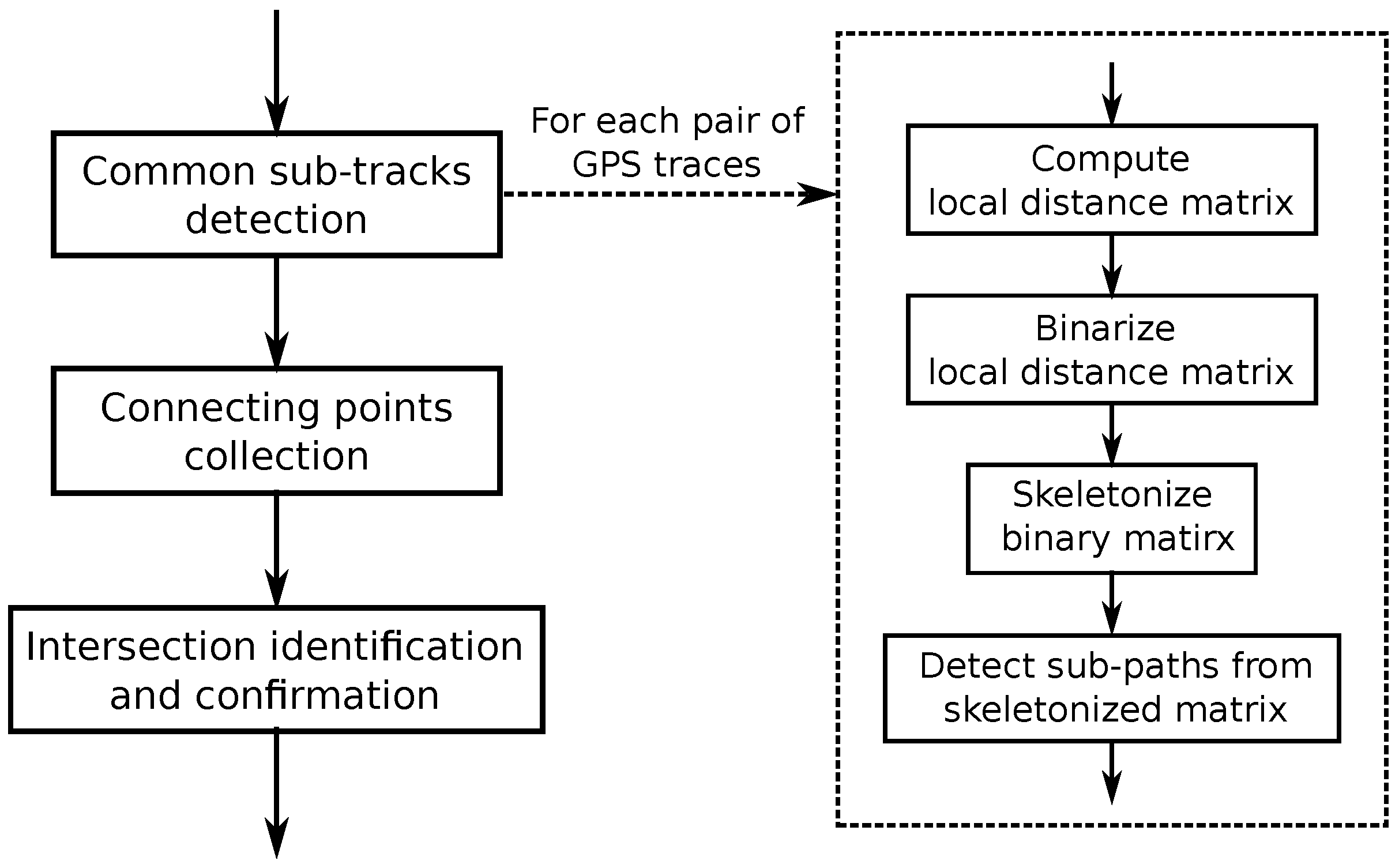
3. Proposed Method
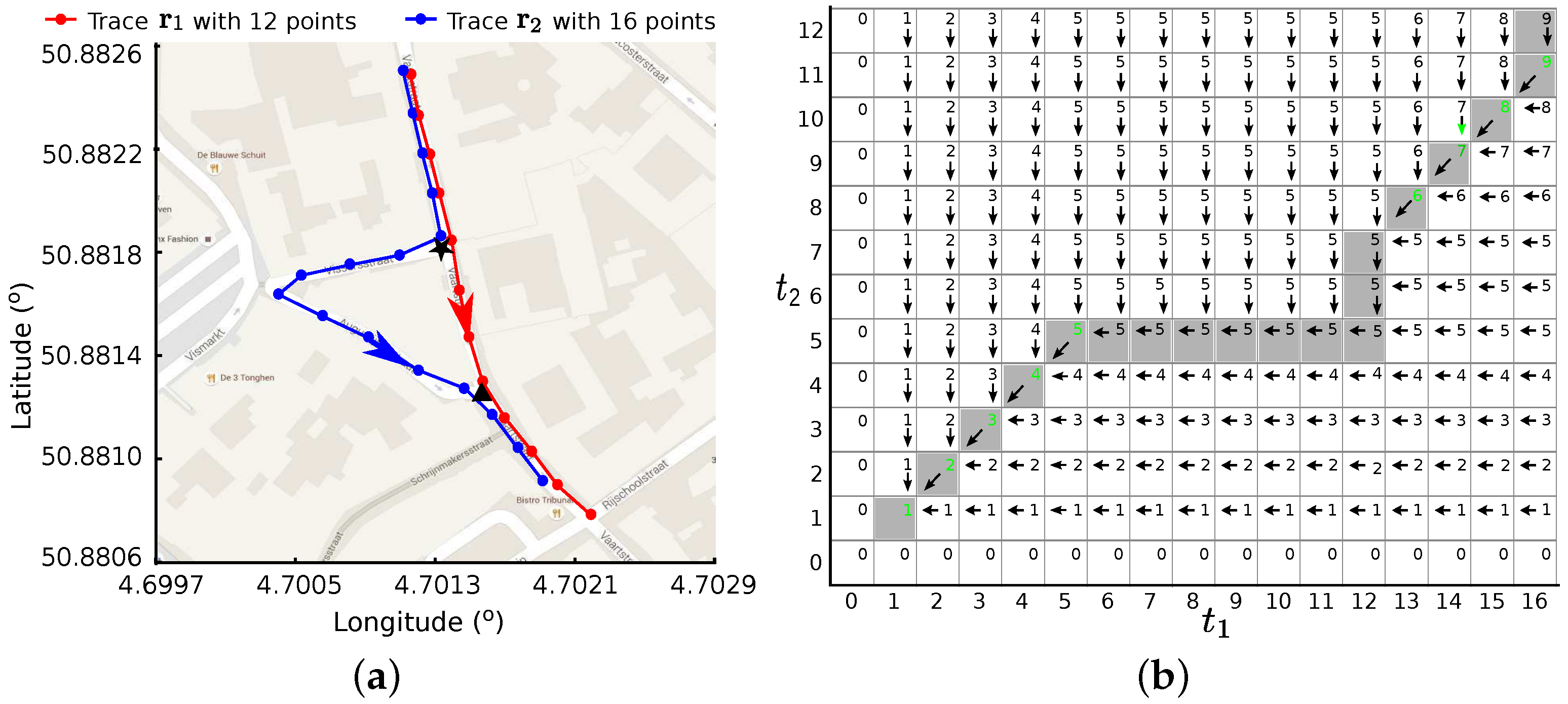
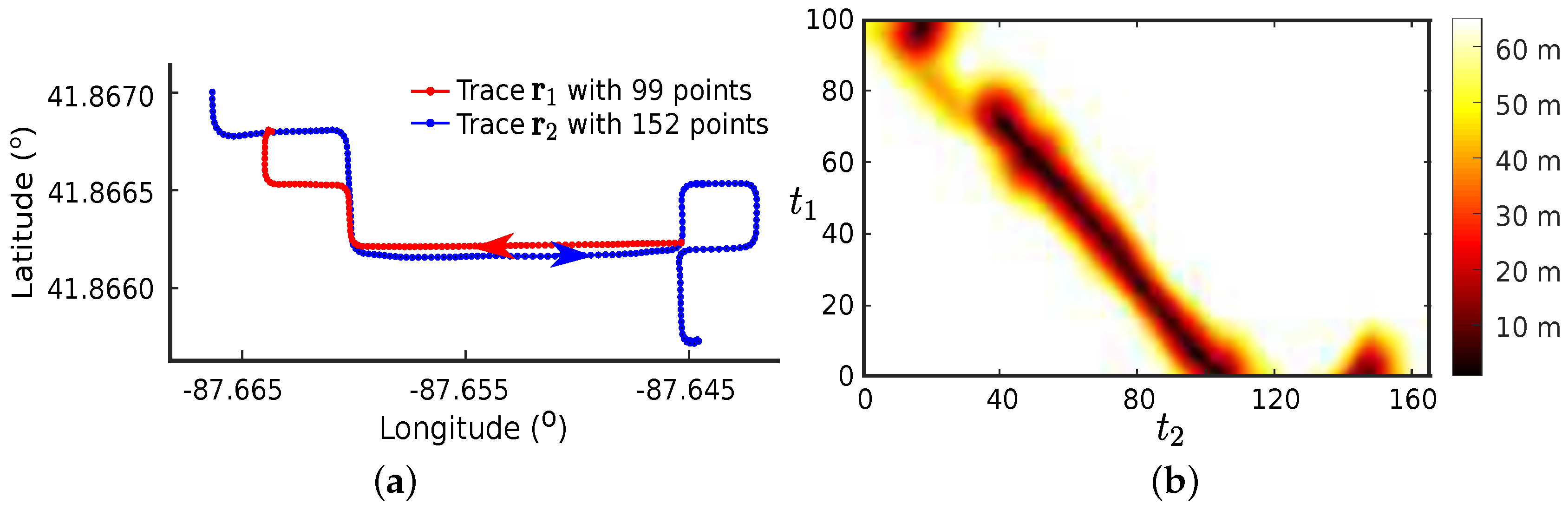
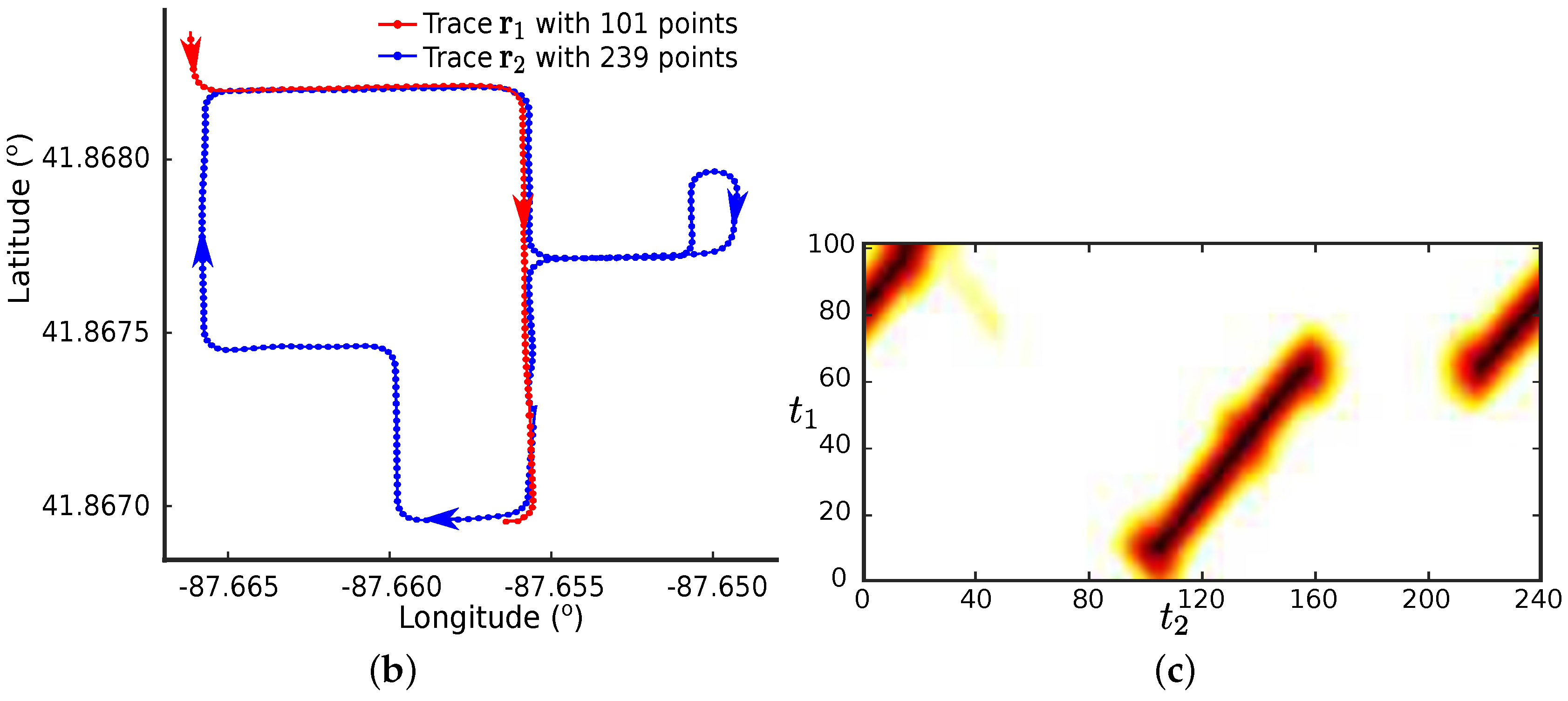
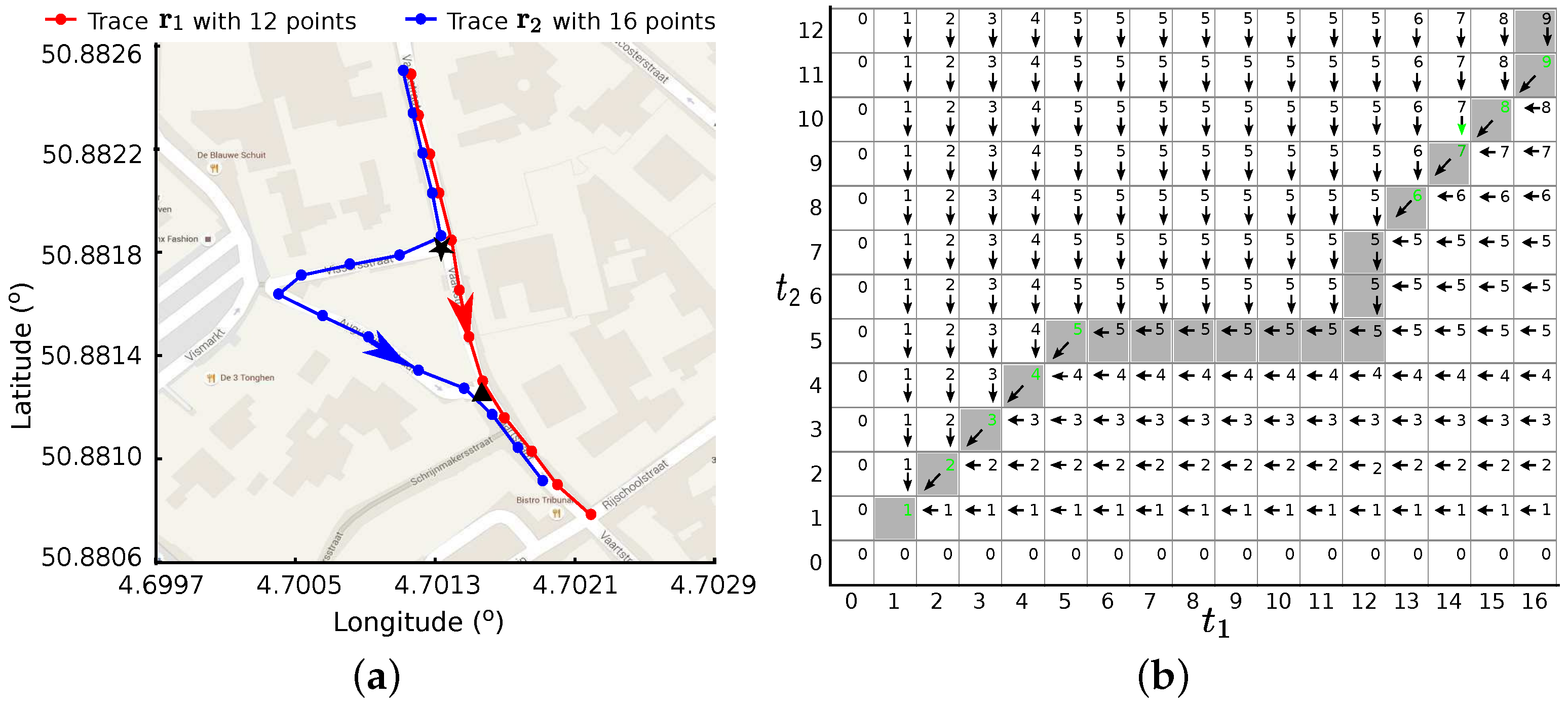
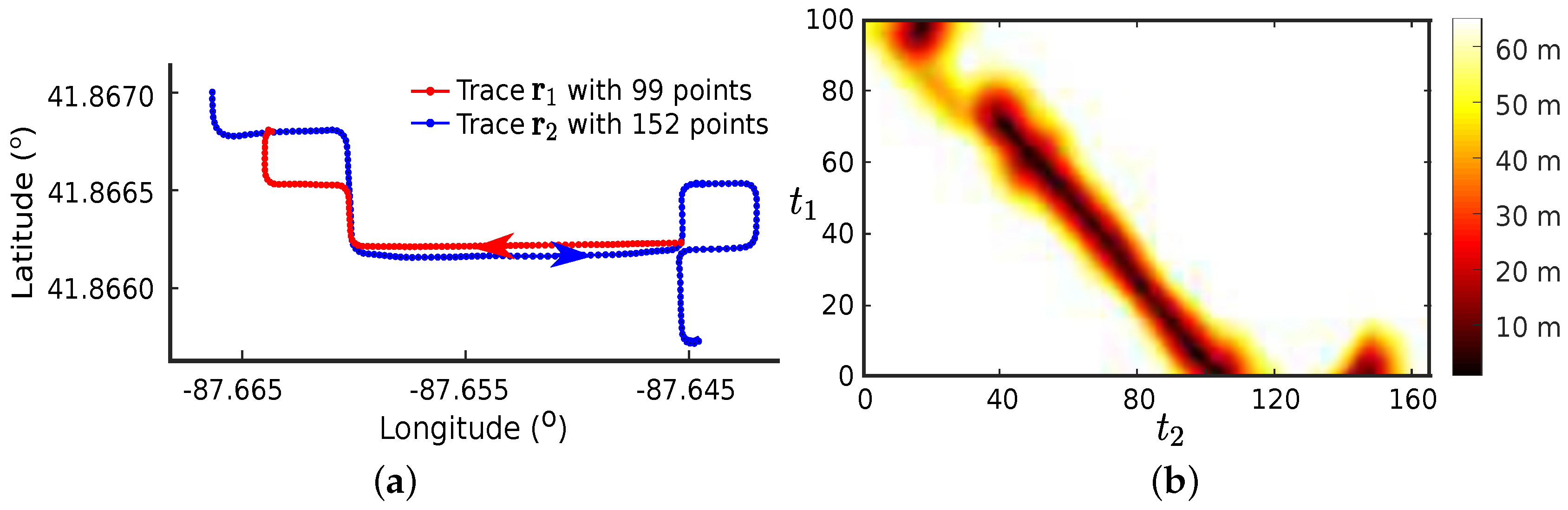
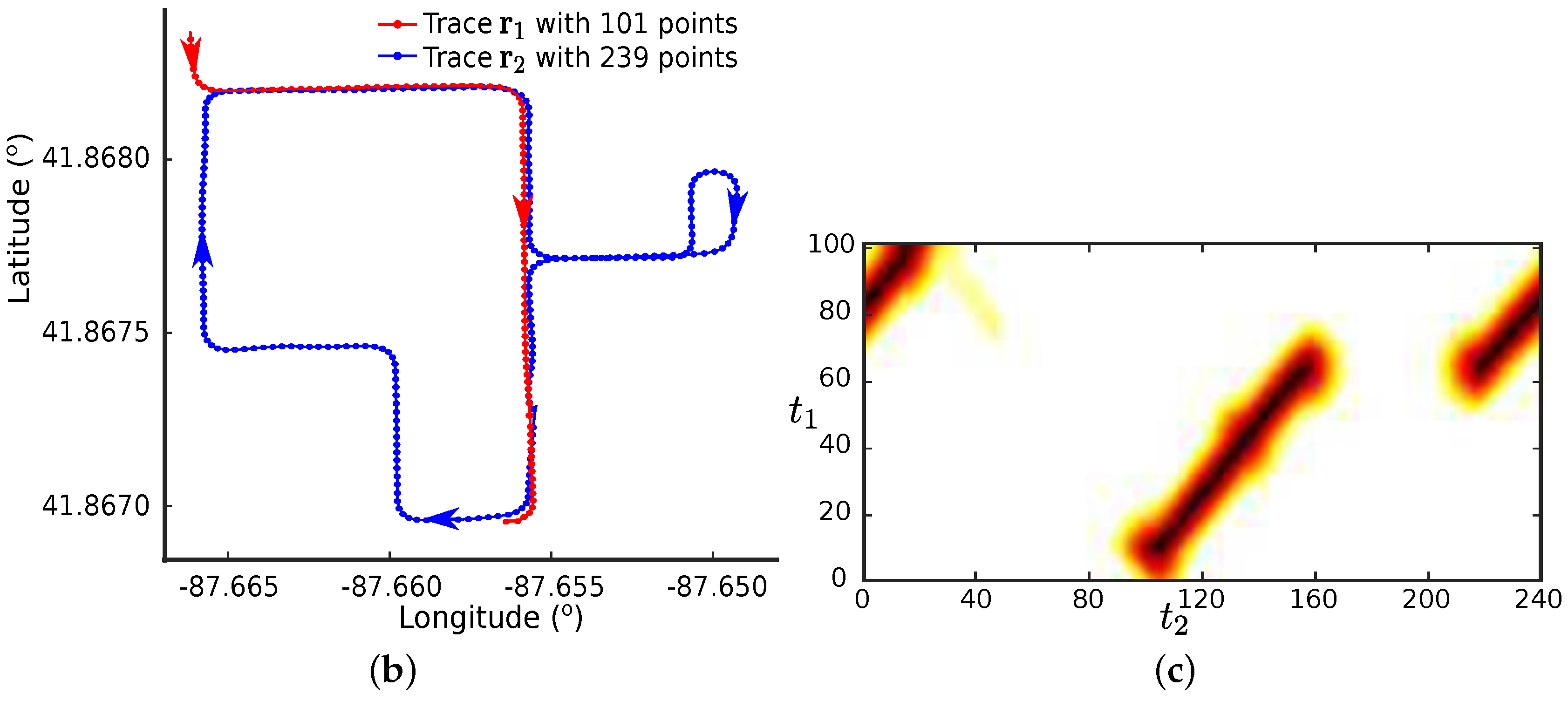
3.1. Find Common Sub-Tracks
- Length: The edge should not be too short. This prevents point matching between noises in the GNSS data, which deviate from the true path. These noises could originate from various sources, such as vehicle ignition system, motor, atmospheric disturbance, building reflection, etc.
- Monotonicity: The edge may not be straight; but should not bend back on itself. This prevents the temporally distant points in one track from matching the same point in the other track.
- Continuity: The edge should be consecutive. This guarantees that the alignment does not omit any point of either sub-track.
- Slope: The edge should not be too steep or too shallow. This prevents short sub-tracks from matching sub-tracks that are too long.
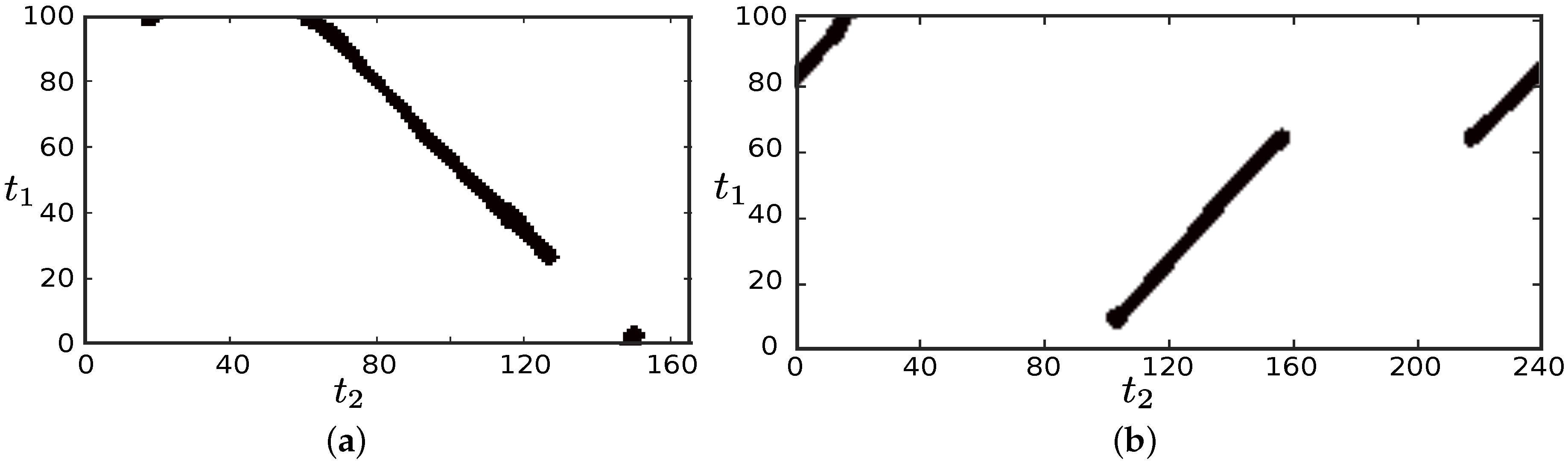
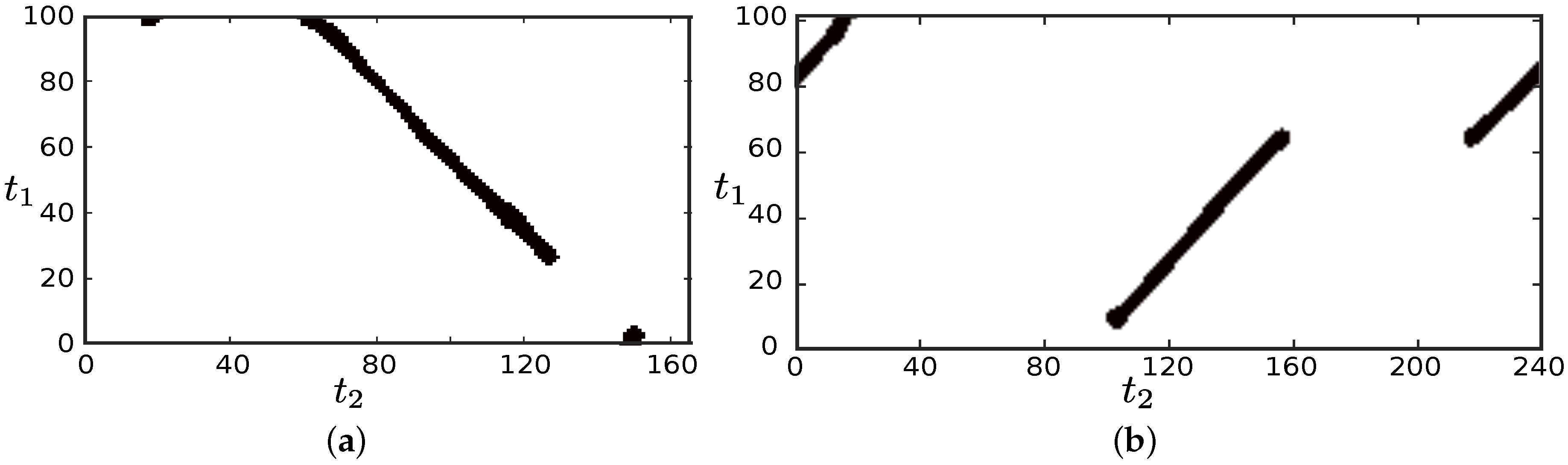
3.1.1. Binarize the Local Distance Matrix
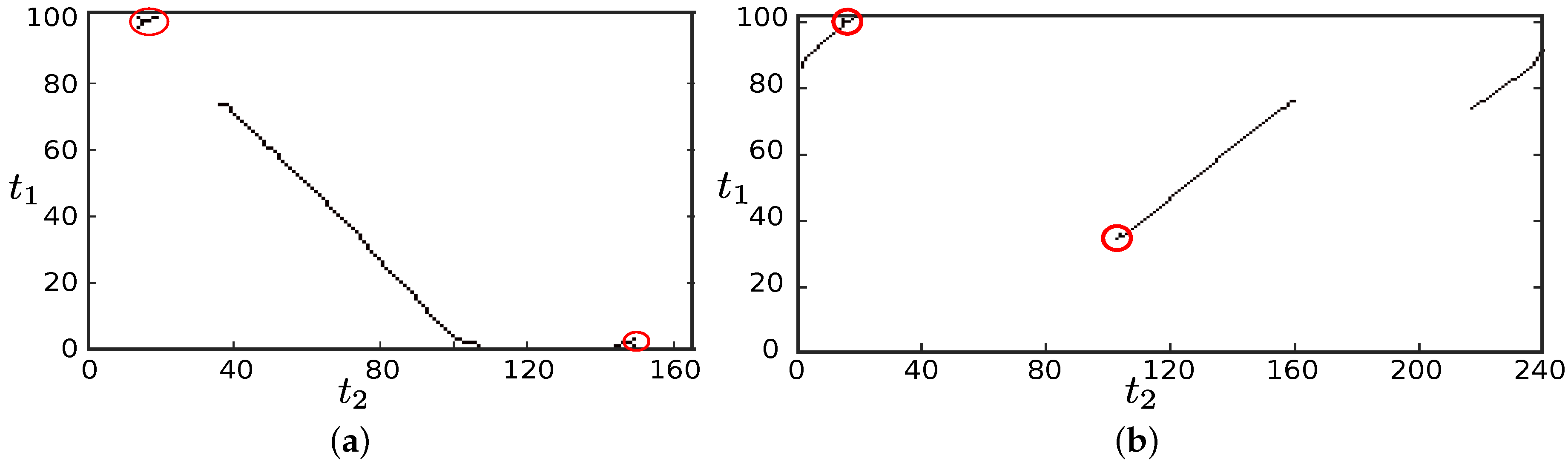
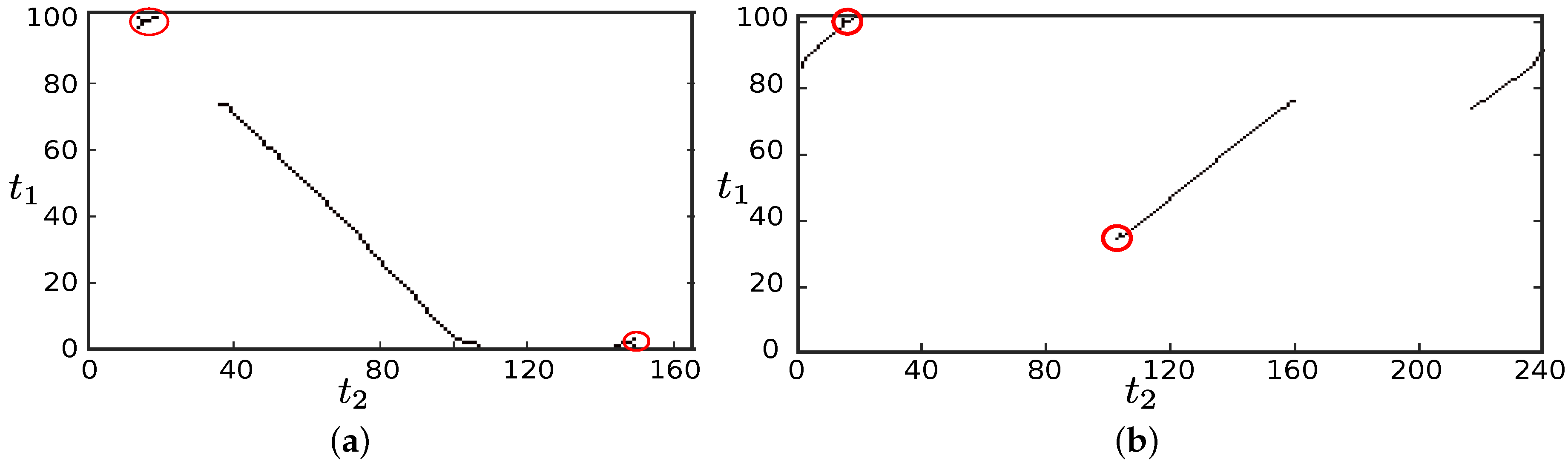
3.1.2. Skeletonize the Local Distance Matrix
- Sub-iteration 1. The black pixel is set to white if it satisfies all the following conditions:
- (1)
- The number of 0–1 patterns in the ordered set is 1, where are the eight adjacent pixels of in a window, as shown in Table 1.
- (2)
- It has at least two and not more than six nonzero neighbors.
- (3)
- At least one of the three pixels is 0 (white), i.e., .
- (4)
- At least one of the three pixels is 0 (white), i.e., .
- Sub-iteration 2 is the same as Sub-iteration 1, but with conditions and changed:
- (3’)
- At least one of the three pixels is 0 (white), i.e., .
- (4’)
- At least one of the three pixels is 0 (white), i.e., .
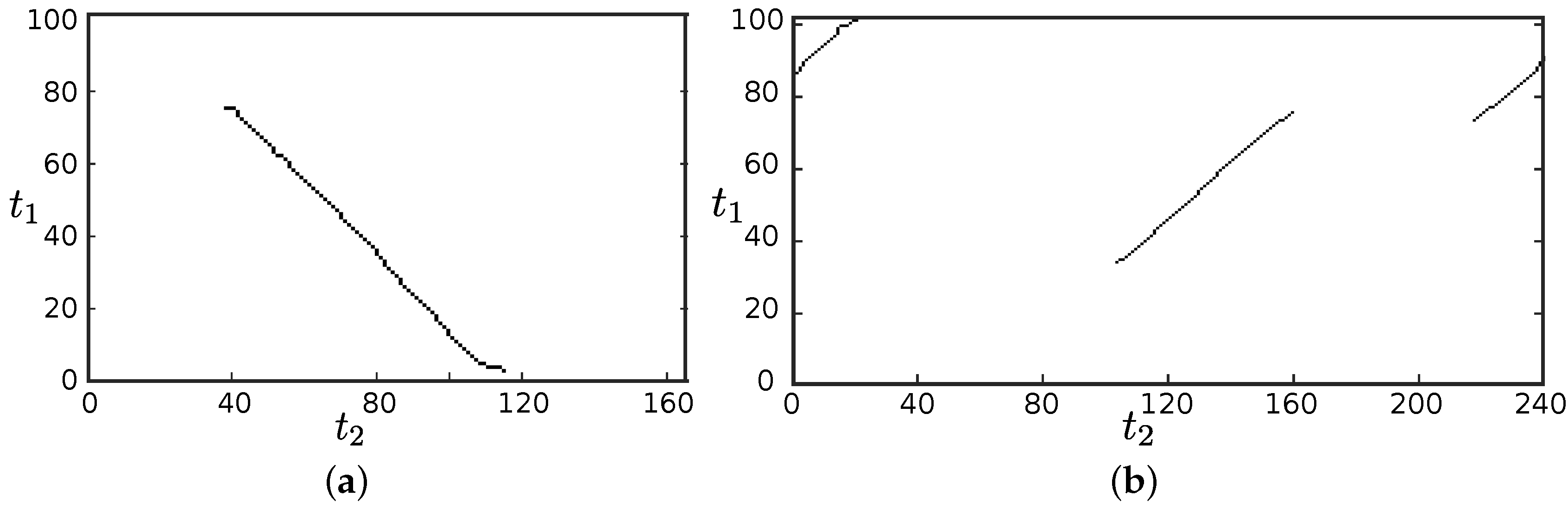
3.1.3. Detect “Sub-Paths” from the Skeletonized Matrix
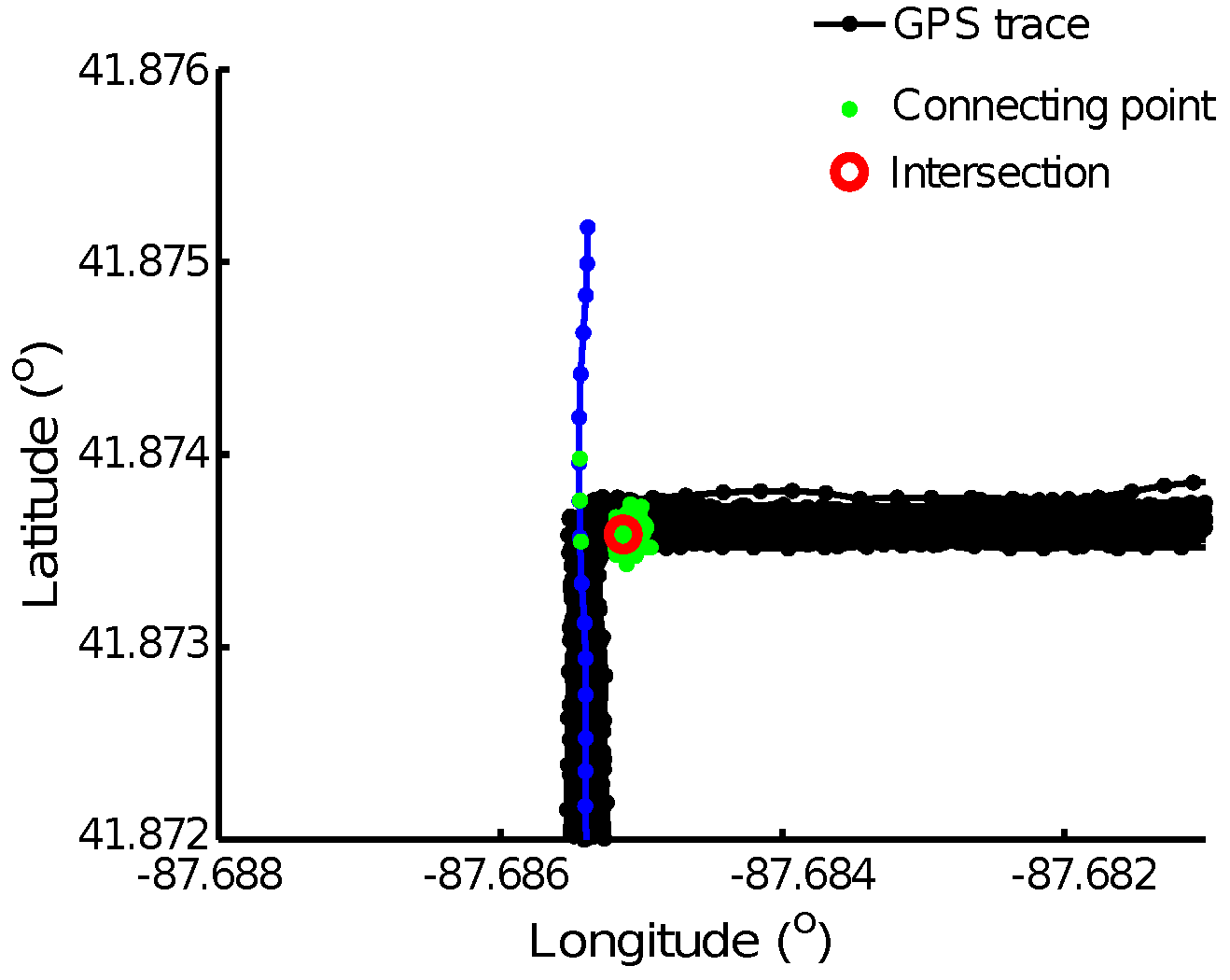
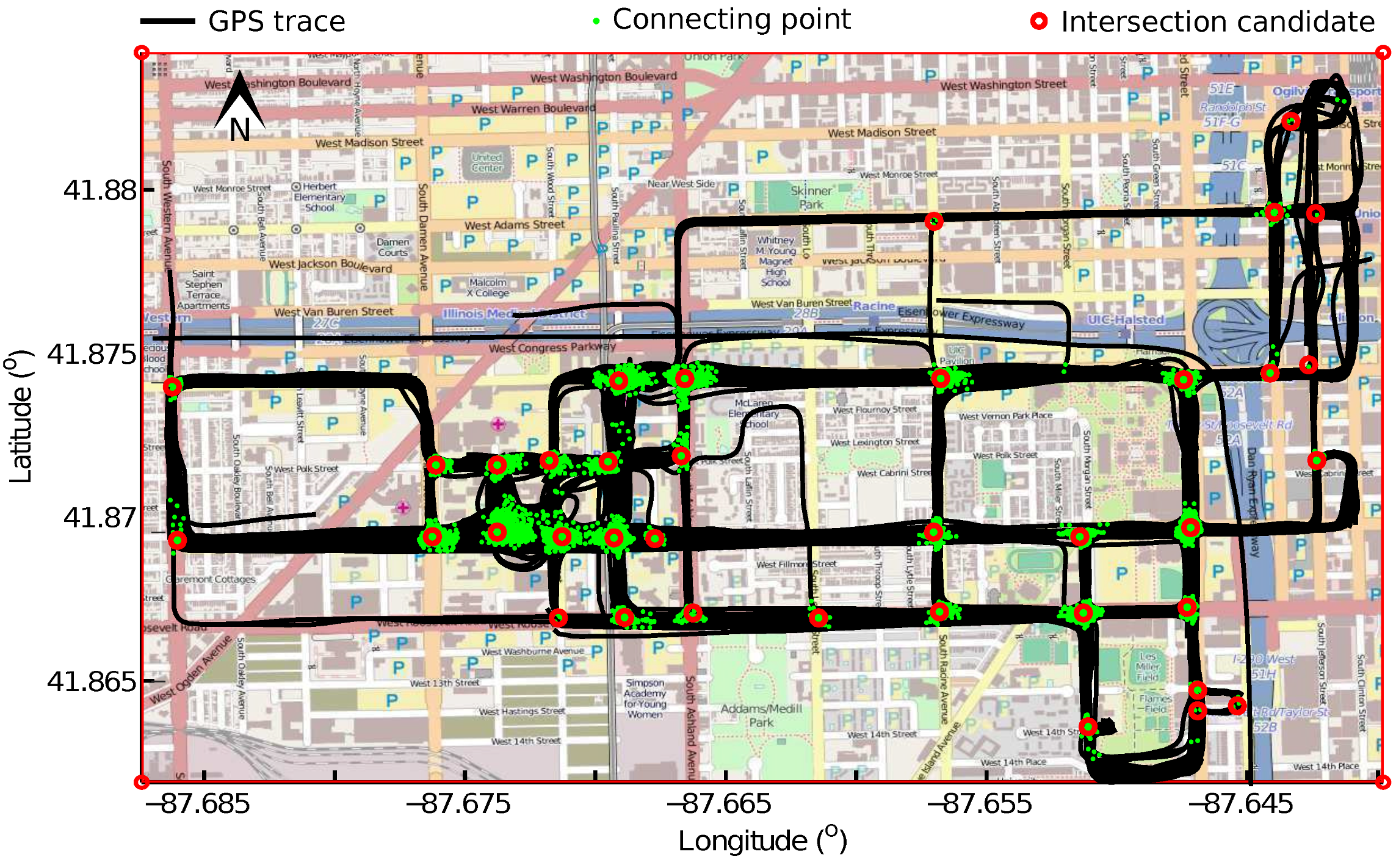
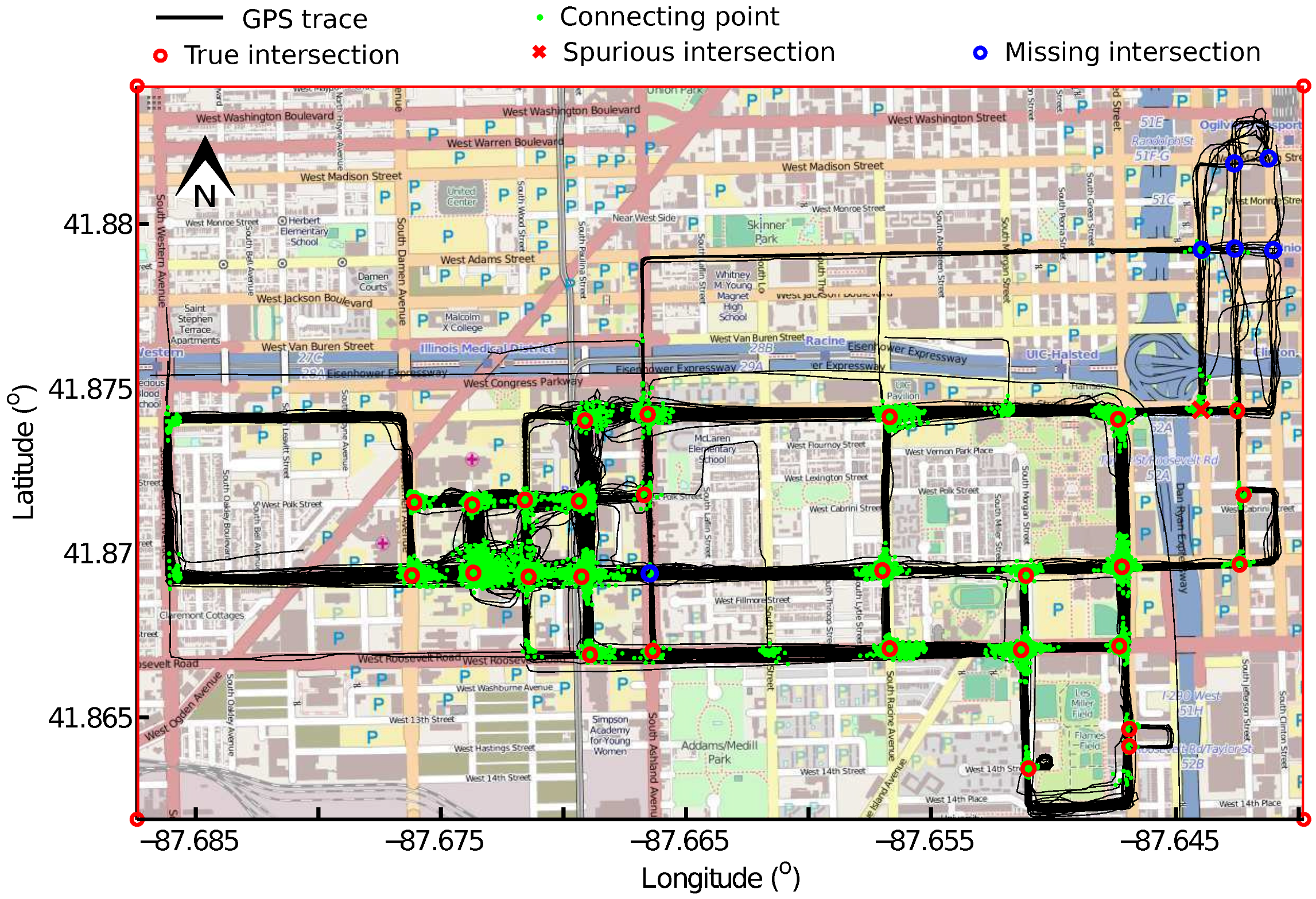
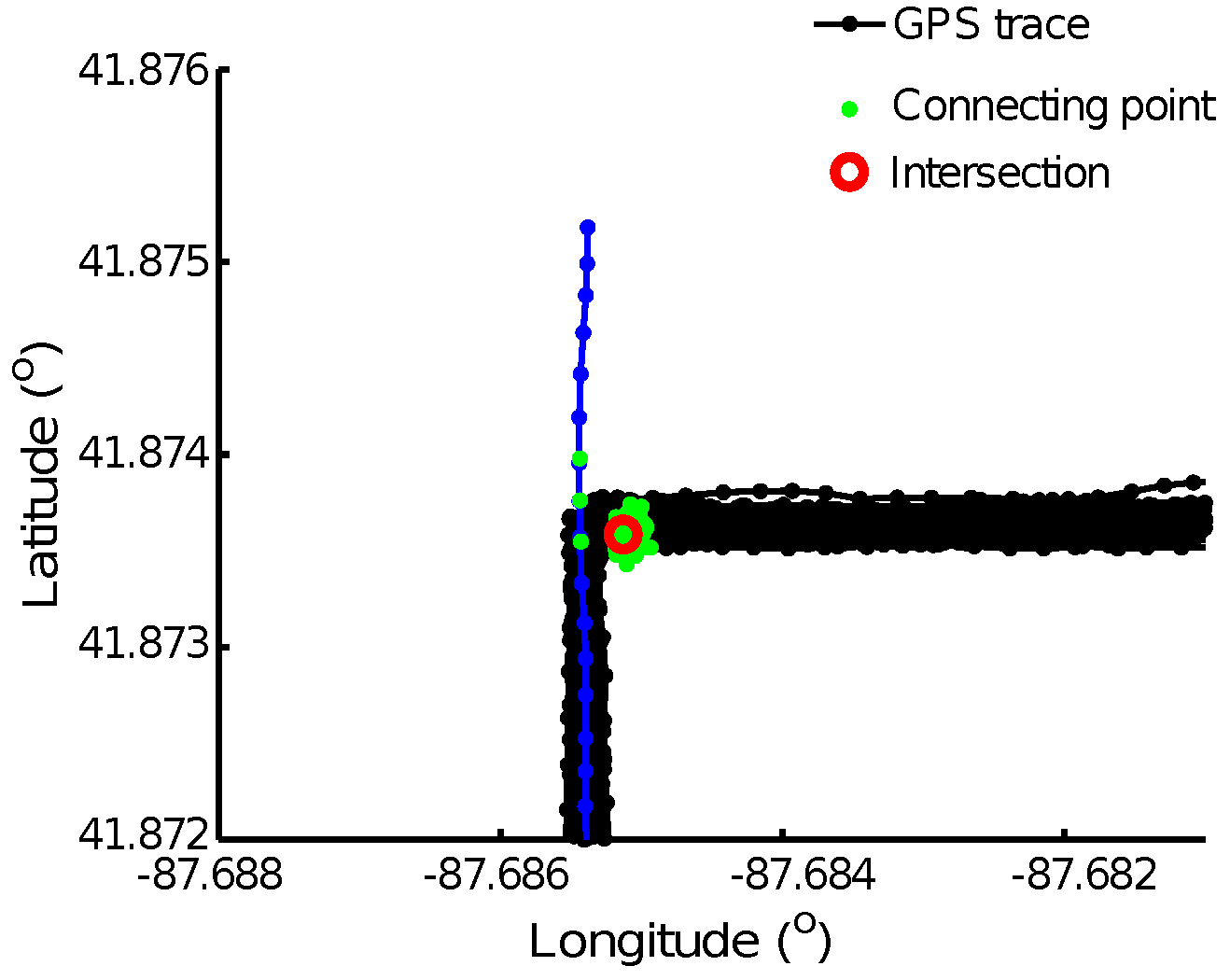
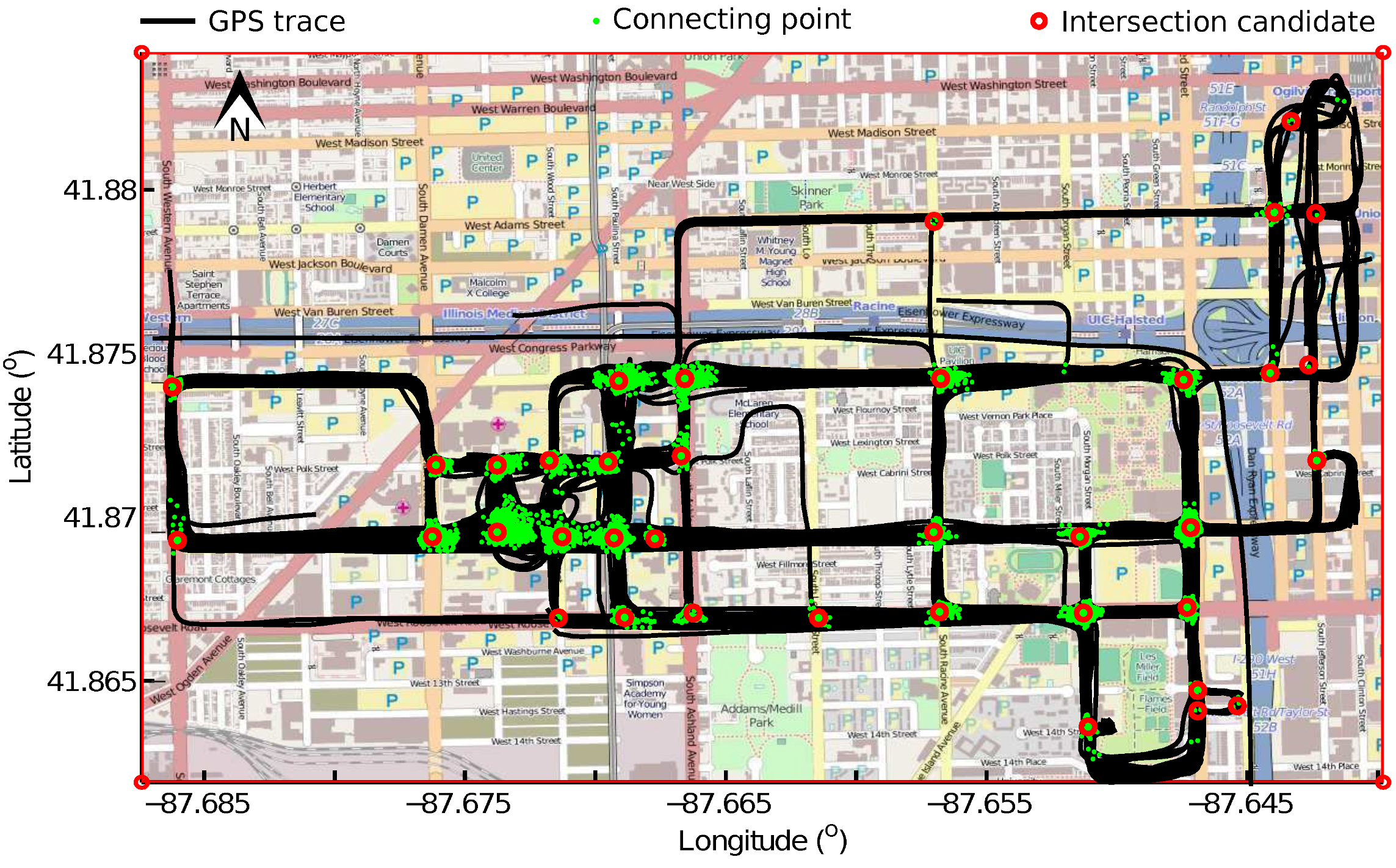
3.2. Extract Intersections
- (1)
- Discretize the area into a 2D grid of cells.
- (2)
- (3)
- Convolve the histogram with a Gaussian smoothing function to approximate the Kernel Density Estimation (KDE).
- (4)
- Find the local maximums on the density map as intersection candidates.
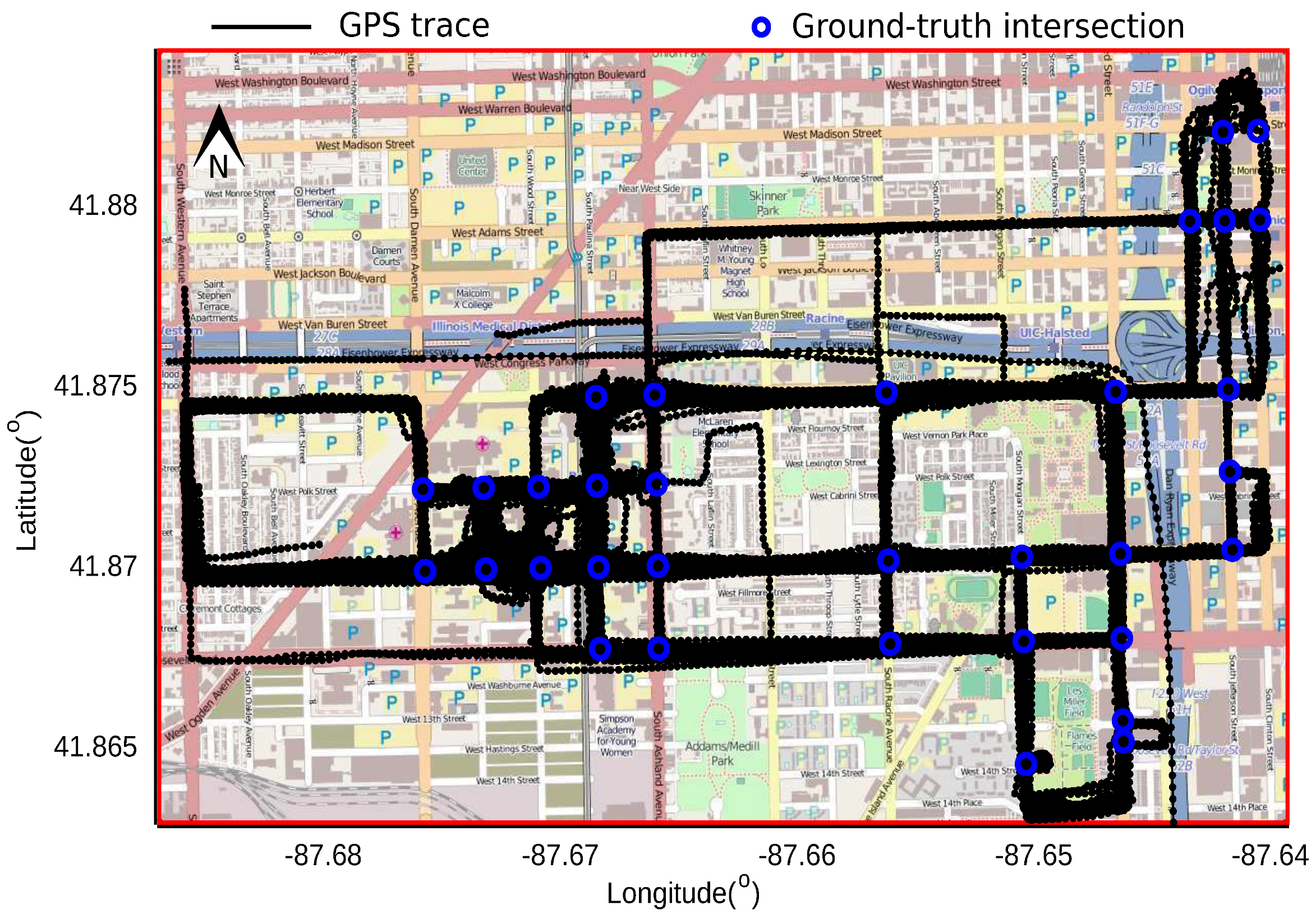
4. Experimental Results
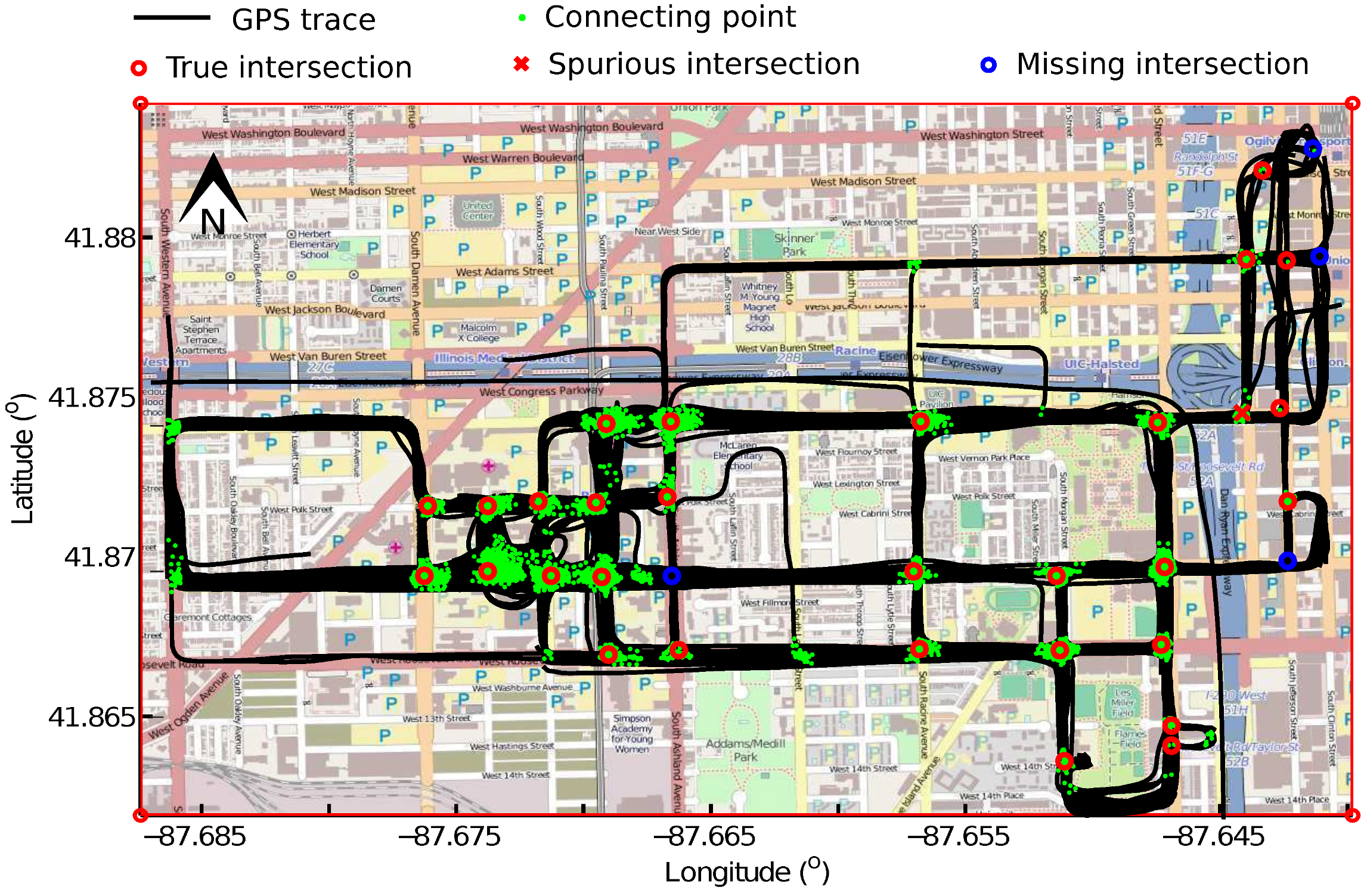
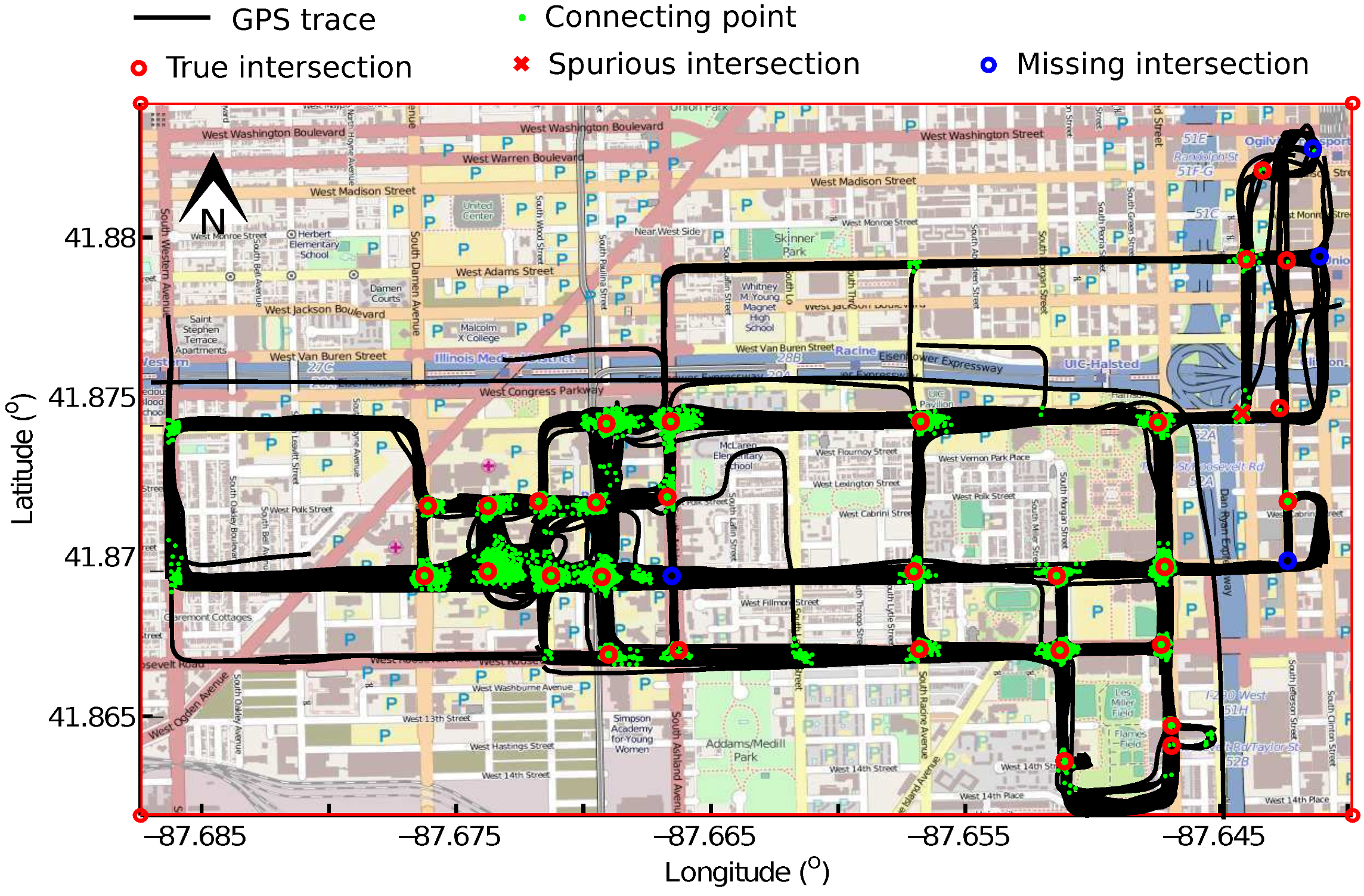
4.1. Results of the Proposed Method
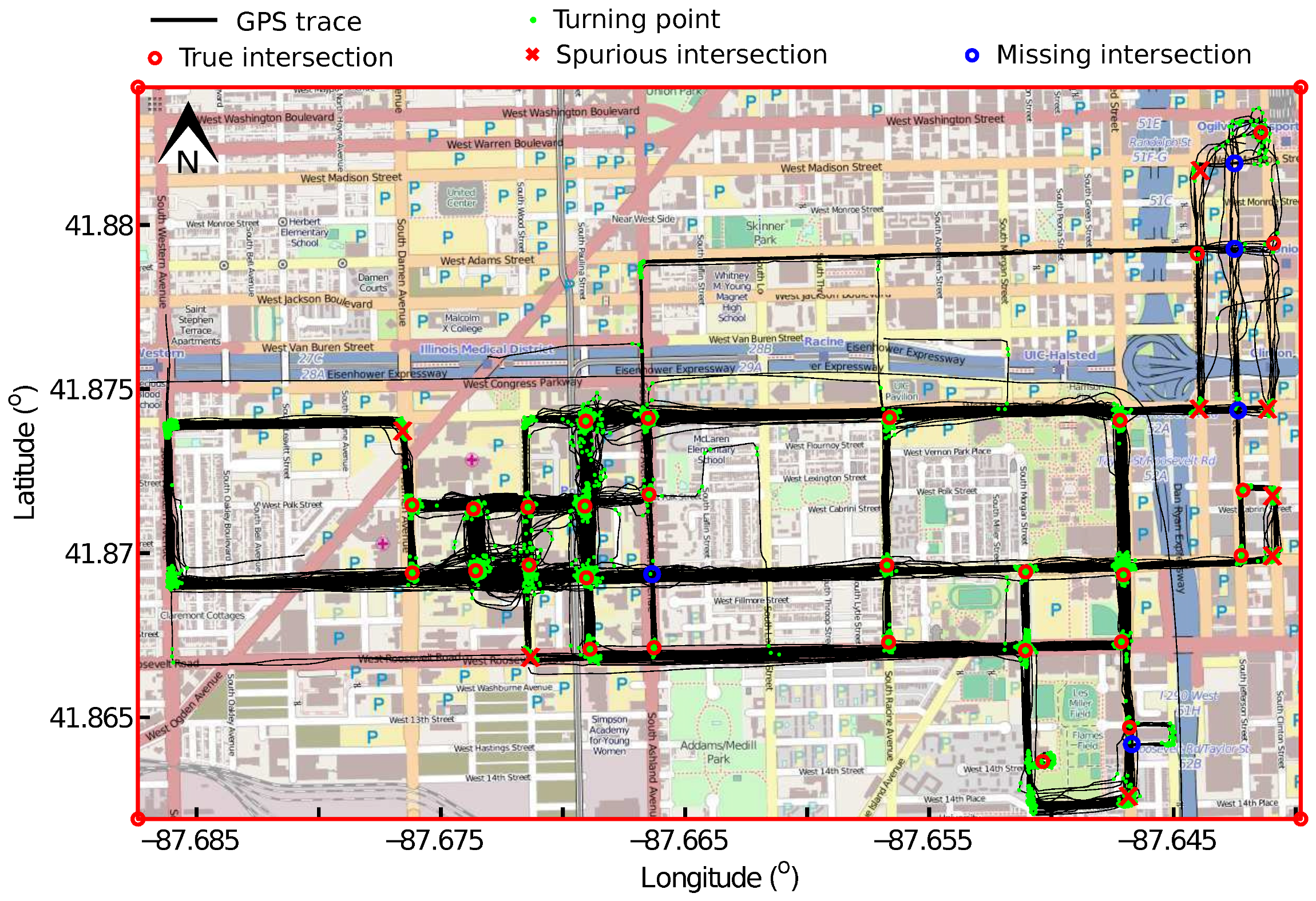
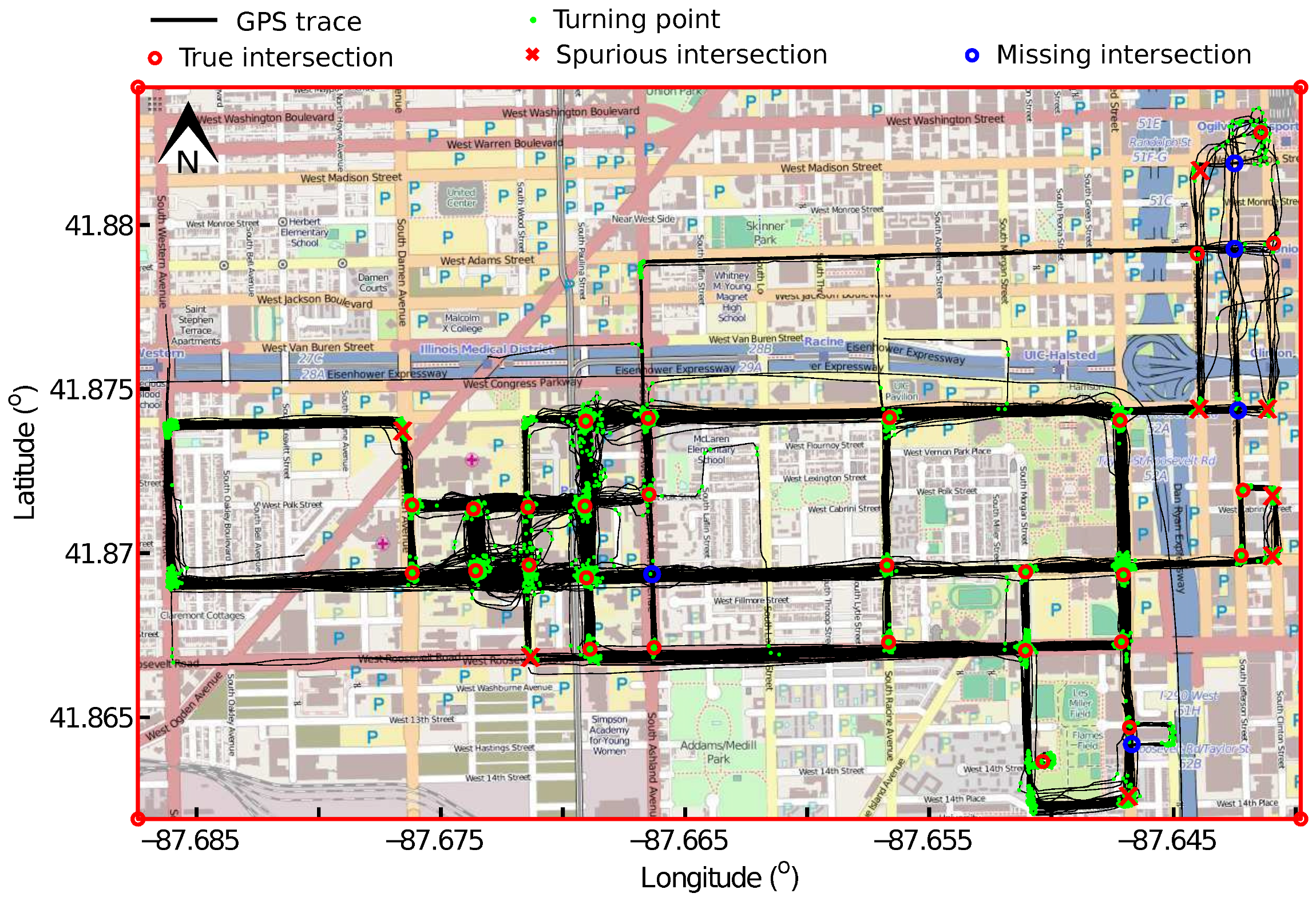
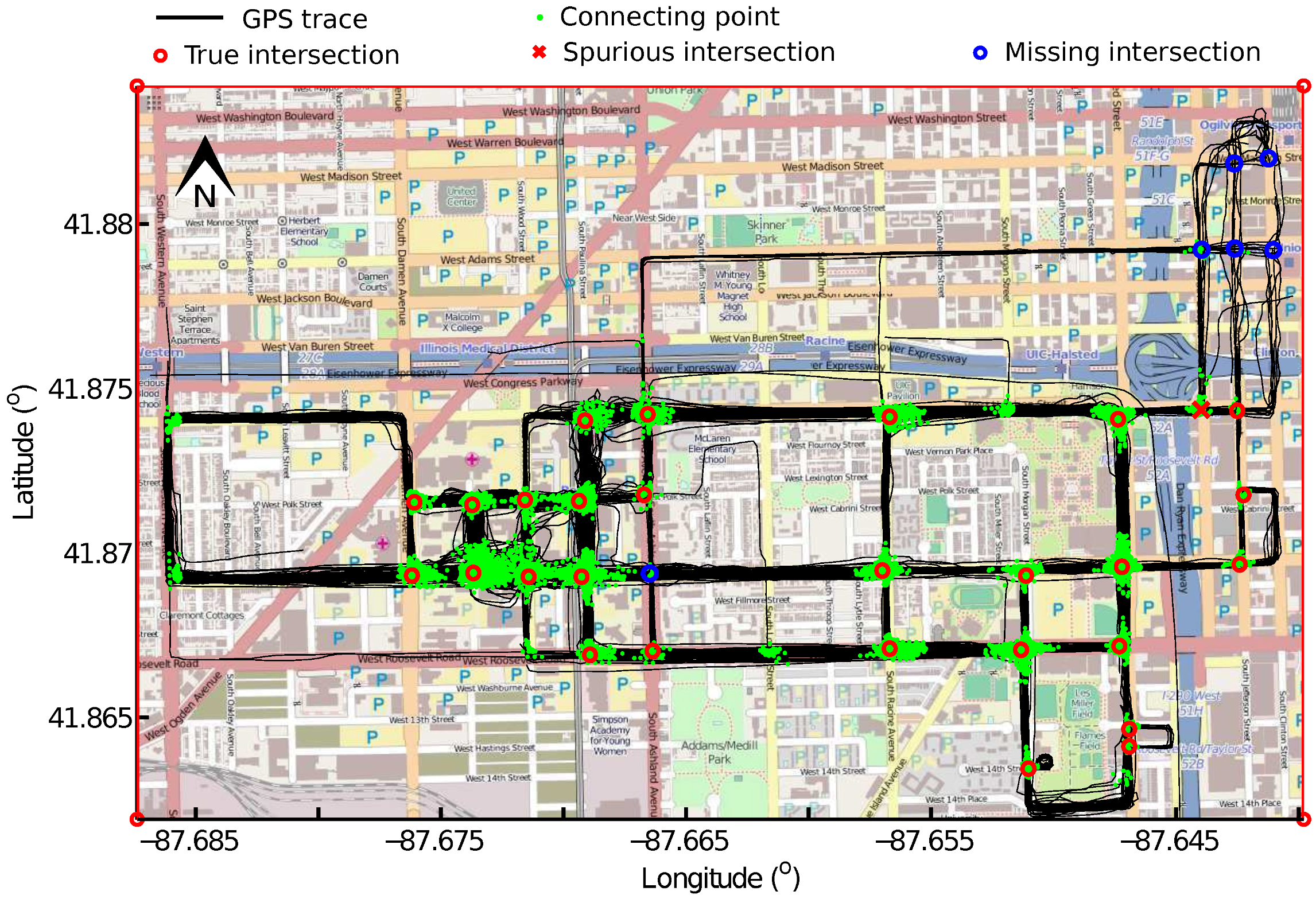
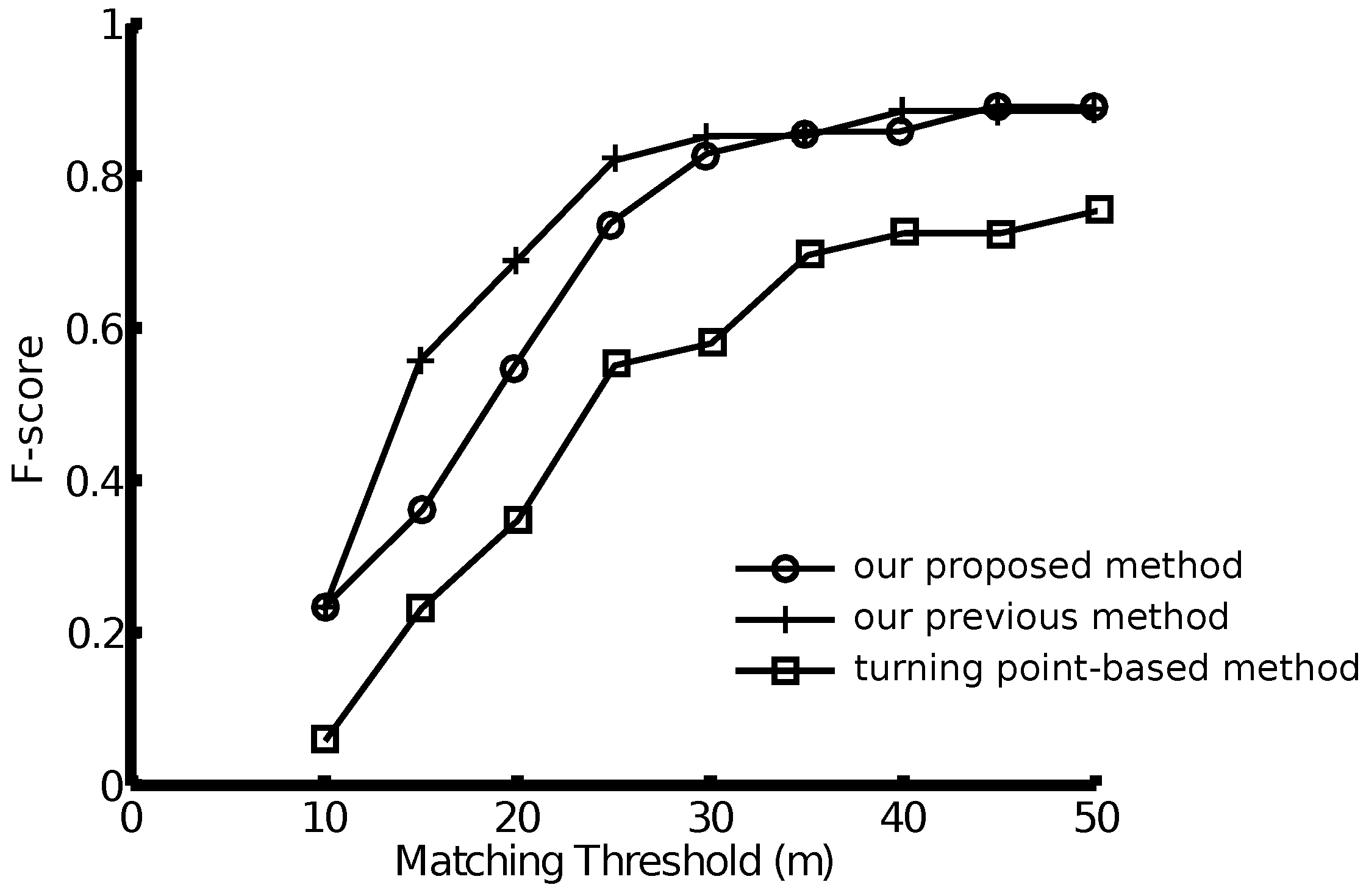
4.2. Comparison
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Biagioni, J.; Eriksson, J. Inferring Road Maps from Global Positioning System Traces. Transp. Res. Rec. 2012, 2291, 61–71. [Google Scholar] [CrossRef]
- Edelkamp, S.; Schrödl, S. Route planning and map inference with global positioning traces. In Computer Science in Perspective; Springer: Berlin, Germany, 2003; pp. 128–151. [Google Scholar]
- Cao, L.; Krumm, J. From GPS traces to a routable road map. In Proceedings of the 17th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Washington, DC, USA, 4–6 November 2009; pp. 3–12. [Google Scholar]
- Worrall, S.; Nebot, E. Automated process for generating digitised maps through GPS data compression. In Proceedings of the Australasian Conference on Robotics and Automation, Brisbane, Australia, 10–12 December 2007. [Google Scholar]
- Xie, X.; Wong, K.; Aghajan, H.; Philips, W. Smart route recommendations based on historical GPS trajectories and weather information. In Proceedings of the Mobile Ghent, Ghent, Belgium, 23–25 October 2013. [Google Scholar]
- Niehoefer, B.; Burda, R.; Wietfeld, C.; Bauer, F.; Lueert, O. GPS community map generation for enhanced routing methods based on trace-collection by mobile phones. In Proceedings of the 1st International Conference on Advances in Satellite and Space Communications, Colmar, France, 20–25 July 2009; pp. 156–161. [Google Scholar]
- Karagiorgou, S.; Pfoser, D. On vehicle tracking data-based road network generation. In Proceedings of the 20th International Conference on Advances in Geographic Information Systems, Redondo Beach, CA, USA, 7–9 November 2012; pp. 89–98. [Google Scholar]
- Davics, J.; Beresford, A.R.; Hopper, A. Scalable, distributed, real-time map generation. IEEE Pervasive Comput. 2006, 5, 47–54. [Google Scholar]
- Xie, X.; Philips, W.; Veelaert, P.; Aghajan, H. Road network inference from GPS traces using DTW algorithm. In Proceedings of the 17th IEEE International Conference on Intelligent Transportation Systems, Qingdao, China, 8–11 October 2014; pp. 906–911. [Google Scholar]
- Herrera, J.C.; Work, D.B.; Herring, R.; Ban, X.J.; Jacobson, Q.; Bayen, A.M. Evaluation of traffic data obtained via GPS-enabled mobile phones: The Mobile Century field experiment. Transp. Res. Part C 2010, 18, 568–583. [Google Scholar] [CrossRef]
- Szeto, W.Y.; Jiang, Y.; Wang, D.Z.W.; Sumalee, A. A sustainable road network design problem with land use transportation interaction over time. Netw. Spat. Econ. 2015, 15, 791–822. [Google Scholar] [CrossRef] [Green Version]
- Comber, A.; Brunsdon, C.; Green, E. Using a GIS-based network analysis to determine urban greenspace accessibility for different ethnic and religious groups. Landsc. Urban Plan. 2008, 86, 103–114. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhang, L.; Xie, X.; Ma, W.Y. Mining interesting locations and travel sequences from GPS trajectories. In Proceedings of the 18th International Conference on World Wide Web, Madrid, Spain, 20–24 April 2009; pp. 791–800. [Google Scholar]
- You, Q.; Krumm, J. Transit tomography using probabilistic time geography: Planning routes without a road map. J. Locat. Based Serv. 2014, 8, 211–228. [Google Scholar] [CrossRef]
- Xie, X.; Wong, K.; Aghajan, H.; Philips, W. Analyzing cyclists’ behaviors and exploring the environments from cycling tracks. In Proceedings of the Cycling Data Challenge 2013 Workshop, Leuven, Belgium, 14 May 2013. [Google Scholar]
- Wu, J.; Zhu, Y.; Ku, T.; Wang, L. Detecting road intersections from coarse-gained GPS traces based on clustering. J. Comput. 2013, 8, 2959–2965. [Google Scholar] [CrossRef]
- Pelleg, D.; Moore, A.W. X-means: Extending K-means with efficient estimation of the number of clusters. In Proceedings of the Seventeenth International Conference on Machine Learning (ICML ’00), Stanford, CA, USA, 29 June–2 July 2000; pp. 727–734. [Google Scholar]
- Wang, J.; Rui, X.; Song, X.; Tan, X.; Wang, C.; Raghavan, V. A novel approach for generating routable road maps from vehicle GPS traces. Int. J. Geogr. Inf. Sci. 2015, 29, 69–91. [Google Scholar] [CrossRef]
- Xie, X.; Wong, K.; Aghajan, H.; Veelaert, P.; Philips, W. Inferring directed road networks from GPS traces by track alignment. Int. J. Geo-Inf. 2015, 4, 2446–2471. [Google Scholar] [CrossRef] [Green Version]
- Fathi, A.; Krumm, J. Detecting road intersections from GPS traces. In Proceedings of the Geographic Information Science, Zurich, Switzerland, 14–17 September 2010; pp. 56–69. [Google Scholar]
- Xie, X.; Liao, W.; Aghajan, H.; Veelaert, P.; Philips, W. Detecting road intersections from gps traces using longest common subsequence algorithm. Int. J. Geo-Inf. 2016, 6, 1. [Google Scholar] [CrossRef]
- Comber, A.; Brunsdon, C.; Green, E.; Zhang, T.Y.; Suen, C.Y. A fast parallel algorithm for thinning digital patterns. Commun. ACM 1984, 27, 236–239. [Google Scholar]
- Dillencourt, M.B.; Samet, H.; Tamminen, M. A general approach to connected-component labeling for arbitrary image representations. J. ACM 1992, 39, 253–280. [Google Scholar] [CrossRef]
- Scott, D.W. Multivariate Density Estimation: Theory, Practice, and Visualization; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- BITS Networked Systems Laboratory. Available online: http://bits.cs.uic.edu/ (accessed on 21 December 2016).
- Yang, Y. An evaluation of statistical approaches to text categorization. Inf. Retr. 1999, 1, 69–90. [Google Scholar] [CrossRef]
- Liu, B. Web Data Mining; Springer: Berlin, Germany, 2007. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, X.; Philips, W. Road Intersection Detection through Finding Common Sub-Tracks between Pairwise GNSS Traces. ISPRS Int. J. Geo-Inf. 2017, 6, 311. https://doi.org/10.3390/ijgi6100311
Xie X, Philips W. Road Intersection Detection through Finding Common Sub-Tracks between Pairwise GNSS Traces. ISPRS International Journal of Geo-Information. 2017; 6(10):311. https://doi.org/10.3390/ijgi6100311
Chicago/Turabian StyleXie, Xingzhe, and Wilfried Philips. 2017. "Road Intersection Detection through Finding Common Sub-Tracks between Pairwise GNSS Traces" ISPRS International Journal of Geo-Information 6, no. 10: 311. https://doi.org/10.3390/ijgi6100311
APA StyleXie, X., & Philips, W. (2017). Road Intersection Detection through Finding Common Sub-Tracks between Pairwise GNSS Traces. ISPRS International Journal of Geo-Information, 6(10), 311. https://doi.org/10.3390/ijgi6100311