An Index Based on Joint Density of Corners and Line Segments for Built-Up Area Detection from High Resolution Satellite Imagery

Abstract
:1. Introduction
- The first group detects built-up areas based on supervised classification methods. In this group, a large number of representative training samples is required to learn the patterns of built-up areas for detection. For example, Benediktsson et al. classified built-up areas from panchromatic high-resolution data by using morphological and neural approaches [8]. Zhong and Wang presented an ensemble model of multiple conditional random fields to incorporate multiple features and learn their contextual information for urban detection [9]. Pesaresi et al. used a novel image classification method, called symbolic machine learning, for detailed urban land cover mapping [10]. Hu et al. presented a novel approach for built-up area detection from high spatial resolution remote sensing images, using a block-based multi-scale feature representation framework [11]. However, the detection accuracy of built-up areas varies with image types, study areas and the selection of training samples and classifies.
- The second group directly detects built-up areas without using any training data. With regard to the employed features, these methods are divided into four subcategories:
- ■
- Texture-based approaches: PanTex [12,13], being a contrast measurement of texture features using the gray-level co-occurrence matrix, has been widely used for global human settlement extraction. However, forested areas, which contain high PanTex values due to tree shadows, are subject to be taken as built-up areas.
- ■
- Building-density-based approaches: Huang and Zhang [14] propose a building detection method using the difference of morphological profiles, and the corresponding building-density-based feature is employed to extract the built-up areas in [7]. However, the building extraction itself is still a difficult problem and faces great challenges, and it often fails to extract built-up areas.
- ■
- Corner-density-based approaches: The local key point features such as SIFT (Scale Invariant Feature Transform) [15], local feature point extraction using Gabor filters [3], junctions [7] and Harris corners [16] are widely employed to detect built-up areas. To improve the detection accuracy, the literature presents some variants of corner detection methods such as improved Harris [2] and modified Harris for edges and corners [17]. However, corners extensively exist in farmland areas and highways, which leads to the farmlands and highways possibly being wrongly labeled as human settlements.
- ■
- Edge-density-based approaches: Edge is an importance feature for image understanding. For example, Gong and Howarth [18] incorporate the edge-density feature in image classification to increase the accuracy by approximately 10%. Ünsalan and Boyer [19] introduce a set of measures based on straight lines to assess land development levels in high-resolution panchromatic satellite images. Recently, Chen et al. [20] realized the extraction of built-up areas from VHSR images using edge density features. However, edges are common features even in natural scenes, leading to the failure of built-up area extraction.
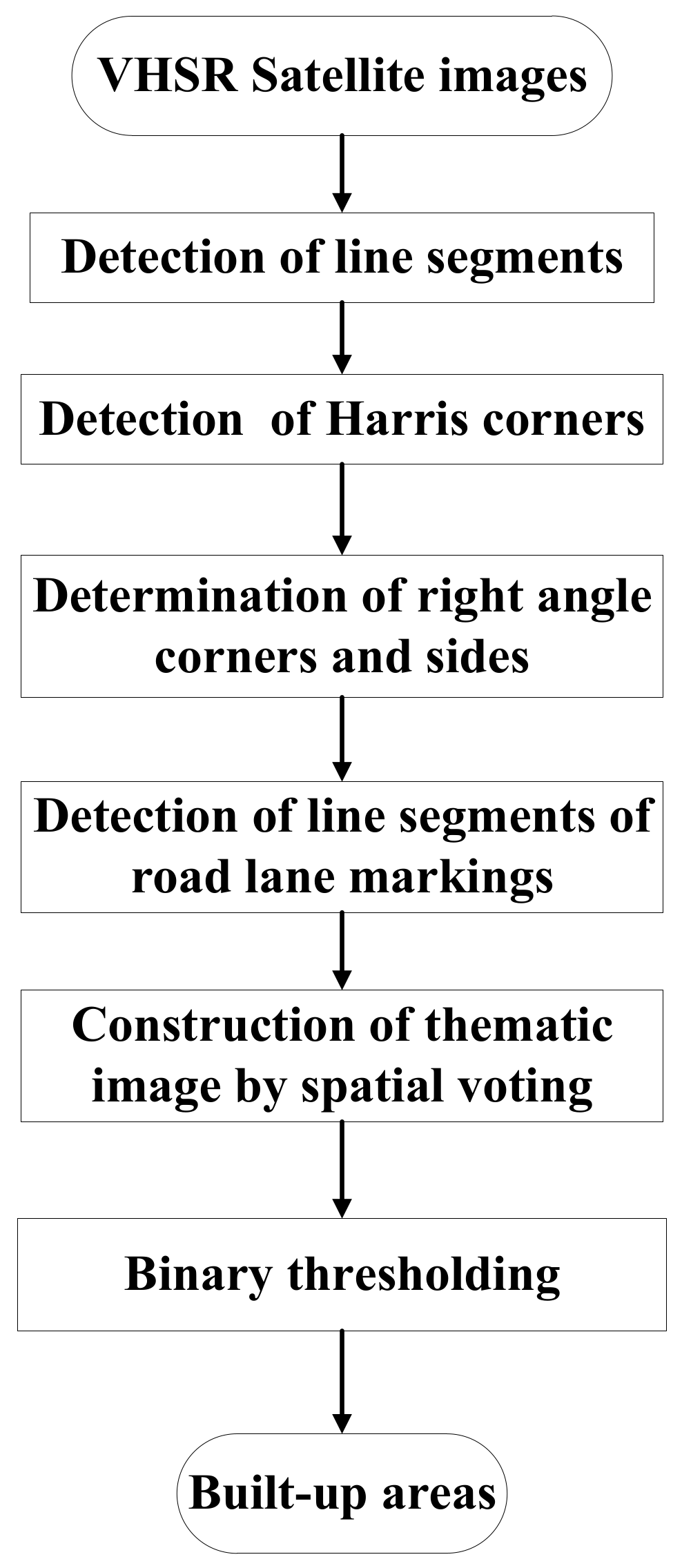
2. The Proposed Framework for Built-Up Area Extraction
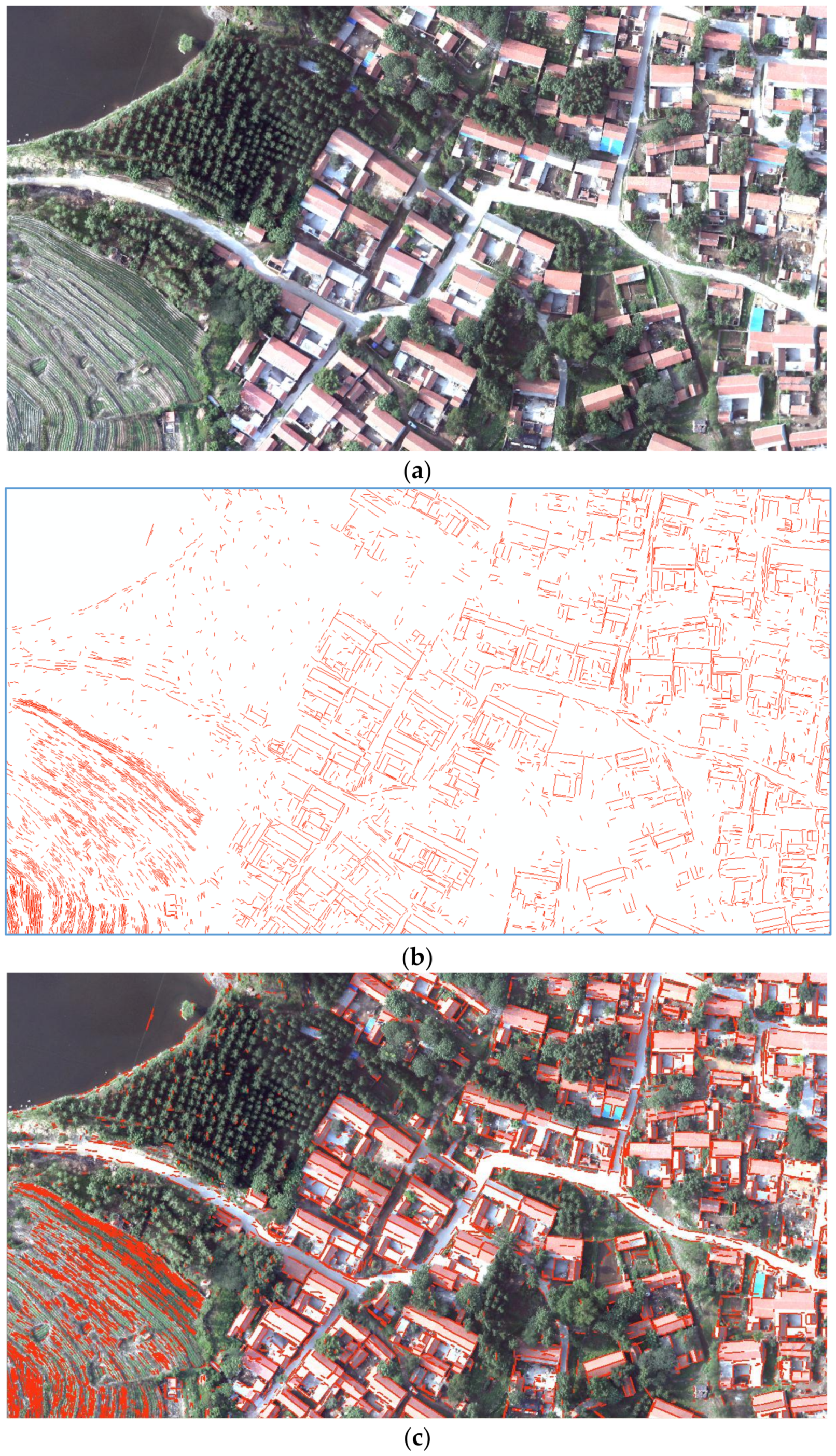
2.1. Detection of Line Segments
2.2. Detection of Harris Corners
2.3. Verification of Harris Corners by Line Segments
- (1)
- Some textured areas, such as grassland and forested areas, contain many corners and few line segments, as shown in Figure 3c;
- (2)
- The farmland areas with a lattice distribution contain many corners and line segments, and their line segments are larger than those of the built-up areas;
- (3)
- The roads contain many corners and line segments; moreover, some corners have a longer line segment and a shorter line segment;
- (4)
- A building roof’s corner generally has two orthogonal line segments with medium lengths, as shown in Figure 3d.
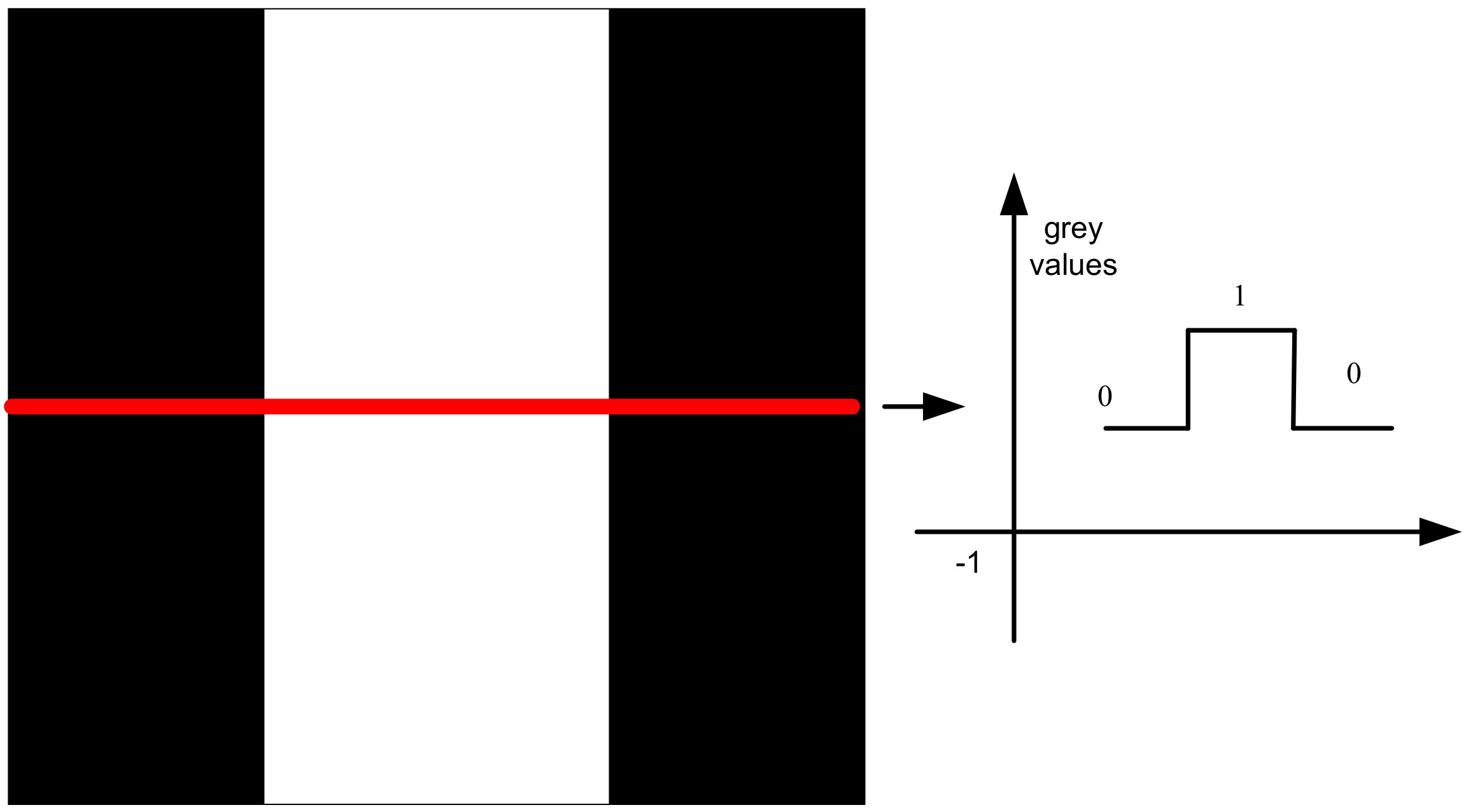
2.4. Detection of Potential Road Lane Markings
2.5. Construction of Built-Up Area Index
2.6. Thresholding of Human-Settlement Index
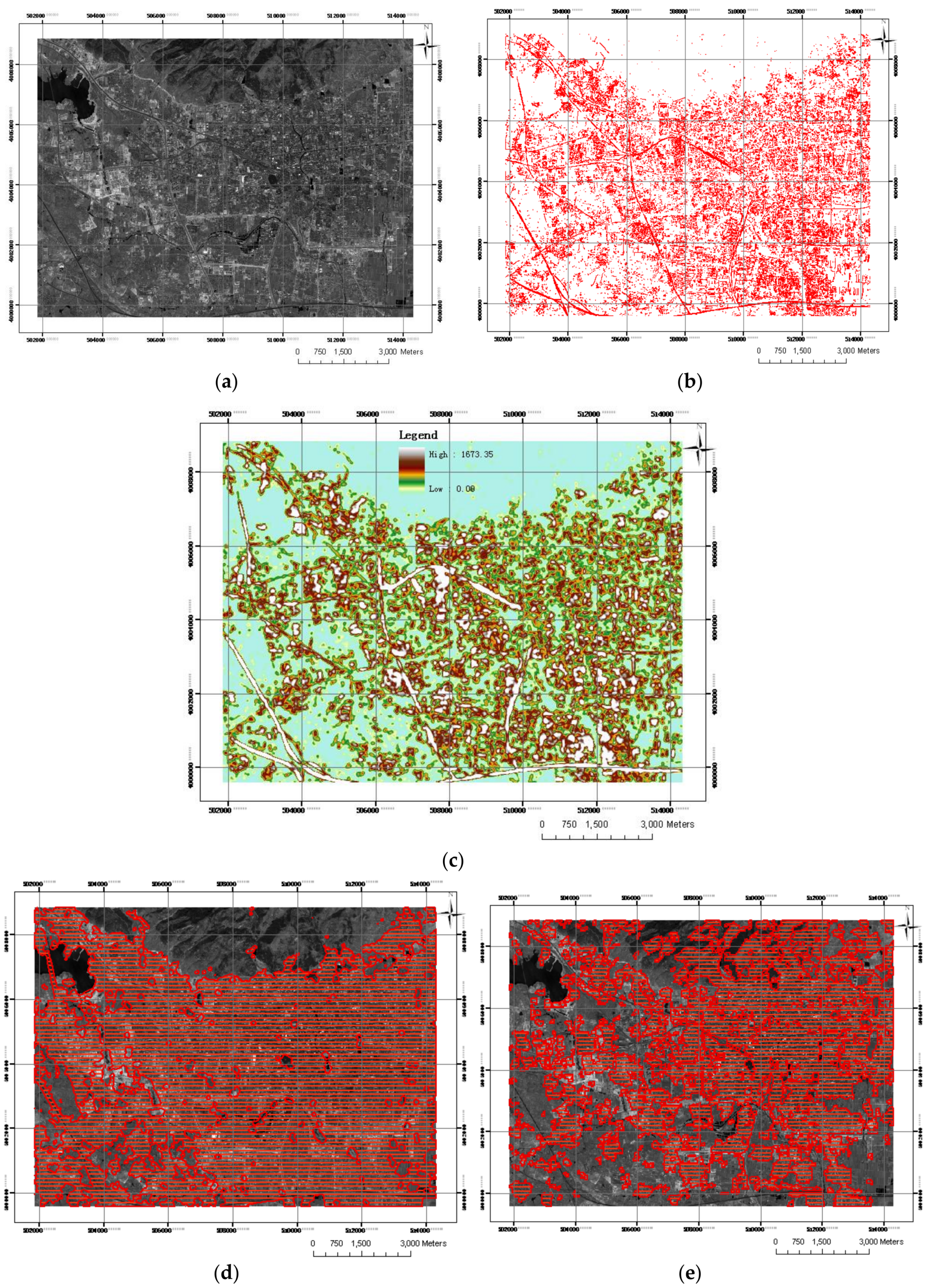
3. Experiments and Analysis
3.1. The Test Datasets
3.2. Parameters Setting and Results
3.3. Performance Evaluation
3.4. Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sırmaçek, B.; Ünsalan, C. A probabilistic framework to detect buildings in aerial and satellite images. IEEE Trans. Geosci. Remote Sens. 2011, 49, 211–221. [Google Scholar] [CrossRef]
- Tao, C.; Tan, Y.; Zou, Z.; Tian, J. Unsupervised detection of built-up areas from multiple high-resolution remote sensing images. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1300–1304. [Google Scholar] [CrossRef]
- Sirmacek, B.; Unsalan, C. Urban area detection using local feature points and spatial voting. IEEE Geosci. Remote Sens. Lett. 2010, 7, 146–150. [Google Scholar] [CrossRef]
- Xu, H. Extraction of urban built-up land features from Landsat imagery using a thematic oriented index combination technique. Photogramm. Eng. Remote Sens. 2007, 73, 1381–1391. [Google Scholar] [CrossRef]
- As-syakur, A.R.; Adnyana, I.W.S.; Arthana, I.W.; Nuarsa, I.W. Enhanced built-up and bareness index (EBBI) for mapping built-up and bare land in an urban area. Remote Sens. 2012, 4, 2957–2970. [Google Scholar] [CrossRef]
- Sun, G.; Chen, X.; Jia, X.; Yao, Y.; Wang, Z. Combinational build-up index (CBI) for effective impervious surface mapping in urban areas. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 9, 2081–2092. [Google Scholar] [CrossRef]
- Liu, G.; Xia, G.; Huang, X.; Yang, W.; Zhang, L. A perception-inspired building index for automatic built-up area detection in high-resolution satellite images. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Melbourne, Australia, 21–26 July 2013; pp. 3132–3135. [Google Scholar]
- Benediktsson, J.A.; Pesaresi, M.; Arnason, K. Classification and feature extraction for remote sensing images from urban areas based on morphological transformations. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1940–1949. [Google Scholar] [CrossRef]
- Zhong, P.; Wang, R. A multiple conditional random fields ensemble model for urban area detection in remote sensing optical images. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3978–3988. [Google Scholar] [CrossRef]
- Pesaresi, M.; Corbane, C.; Julea, A.; Florczyk, A.J.; Syrris, V.; Soille, P. Assessment of the added-Value of Sentinel-2 for detecting built-up areas. Remote Sens. 2016, 8, 299. [Google Scholar] [CrossRef] [Green Version]
- Hu, Z.; Li, Q.; Zhang, Q.; Wu, G. Representation of block-based image features in a multi-scale framework for built-up area detection. Remote Sens. 2016, 8, 155. [Google Scholar] [CrossRef]
- Pesaresi, M.; Gerhardinger, A.; Kayitakire, F. A robust built-up area presence index by anisotropic rotation-invariant textural measure. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2008, 6, 2410–2420. [Google Scholar] [CrossRef]
- Pesaresi, M.; Gerhardinger, A. Improved textural built-up presence index for automatic recognition of human settlements in arid regions with scattered vegetation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2011, 1, 16–26. [Google Scholar] [CrossRef]
- Huang, X.; Zhang, L. Morphological building/shadow index for building extraction from high resolution imagery over urban areas. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 161–172. [Google Scholar] [CrossRef]
- Sirmacek, B.; Unsalan, C. Urban-area and building detection using sift keypoints and graph theory. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1156–1167. [Google Scholar] [CrossRef]
- Li, Y.; Tan, Y.; Deng, J.; Wen, Q.; Tian, J. Cauchy graph embedding optimization for built-up areas detection from high-resolution remote sensing images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 2078–2096. [Google Scholar] [CrossRef]
- Kovacs, A.; Sziranyi, T. Improved harris feature point set for orientation-sensitive urban-area detection in aerial images. IEEE Geosci. Remote Sens. Lett. 2013, 10, 796–800. [Google Scholar] [CrossRef]
- Gong, P.; Howarth, P.J. The use of structural information for improving land-cover classification accuracies at the rural-urban fringe. Photogramm. Eng. Remote Sens. 1990, 56, 67–73. [Google Scholar]
- Ünsalan, C.; Boyer, K.L. Classifying land development in high-resolution panchromatic satellite images using straight-line statistics. IEEE Trans. Geosci. Remote Sens. 2004, 42, 907–919. [Google Scholar] [CrossRef]
- Chen, H.; Tao, C.; Zou, Z.; Shao, L. Extraction of built-up areas extraction from high-resolution remote-sensing images using edge density features. J. Appl. Sci. 2014, 32, 537–542. [Google Scholar]
- Von Gioi, R.G.; Jakubowicz, J.; Morel, J.M.; Randall, G. LSD: A line segment detector. Image Process. Line 2012, 2, 35–55. [Google Scholar] [CrossRef]
- Hu, X.; Shen, J.; Shan, J.; Pan, L. Local edge distributions for detection of salient structure textures and objects. IEEE Geosci. Remote Sens. Lett. 2013, 10, 466–470. [Google Scholar] [CrossRef]
- Lin, C.; Nevatia, R. Building detection and description from a single intensity image. Comput. Vis. Image Understand. 1998, 72, 101–121. [Google Scholar] [CrossRef]
- Bums, J.B.; Hanson, A.R.; Riseman, E.M. Extracting straight lines. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 4, 425–455. [Google Scholar]
- Von Gioi, R.G.; Jakubowicz, J.; Morel, J.M.; Randall, G. LSD: A fast line segment detector with a false detection control. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 722–732. [Google Scholar] [CrossRef] [PubMed]
- Desolneux, A.; Moisan, L.; Morel, J.M. Meaningful alignments. Int. J. Comput. Vis. 2000, 40, 7–23. [Google Scholar] [CrossRef]
- Desolneux, A.; Moisan, L.; Morel, J.M. From Gestalt Theory to Image Analysis, A Probabilistic Approach; Springer: New York, NY, USA, 2008; ISBN 0387726357. [Google Scholar]
- Harris, C.; Stephens, M. A combined corner and edge detector. In Proceedings of the Alvey Vision Conference, Manchester, UK, 31 August–2 September 1988; pp. 147–151. [Google Scholar]
- Miroslav, T.; Mark, H. Fast corner detection. Image Vis. Comput. 1998, 16, 75–87. [Google Scholar]
- Smith, S.M.; Brady, J.M. SUSAN: A new approach to low level image processing. Int. J. Compu. Vis. 1997, 23, 45–78. [Google Scholar] [CrossRef]
- Fonte, L.M.; Gautama, S.; Philips, W.; Goeman, W. Evaluating corner detectors for the extraction of man-made structures in urban areas. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Seoul, Korea, 25–29 July 2005; pp. 237–240. [Google Scholar]
- Hinz, S.; Baumgartner, A. Automatic extraction of urban road network from multi-view aerial imagery. ISPRS J. Photogramm. Remote Sens. 2003, 58, 83–98. [Google Scholar] [CrossRef]
- Zhang, C. Towards an operational system for automated updating of road databases by integration of imagery and geodata. ISPRS J. Photogramm. Remote Sens. 2003, 58, 166–186. [Google Scholar] [CrossRef]
- Jin, H.; Feng, Y.; Li, M. Towards an automatic system for road lane marking extraction in large-scale aerial images acquired over rural areas by hierarchical image analysis and Gabor filter. Int. J. Remote Sens. 2012, 33, 2747–2769. [Google Scholar] [CrossRef] [Green Version]
- Tournaire, O.; Paparoditis, N. A geometric stochastic approach based on marked point processes for road mark detection from high resolution aerial images. ISPRS J. Photogramm. Remote Sens. 2009, 64, 621–631. [Google Scholar] [CrossRef]
- Lin, X.; Zhang, R.; Shen, J. A template-matching based approach for extraction of roads from very high resolution remotely sensed imagery. Int. J. Image Data Fusion 2012, 3, 149–168. [Google Scholar] [CrossRef]
- Hu, X.; Tao, C.V. A reliable and fast ribbon road detector using profile analysis and model-based verification. Int. J. Remote Sens. 2005, 26, 887–902. [Google Scholar] [CrossRef]
- Jackson, R.R.; Fiona, R.C.; Chris, M.C. Geographic variation in a spider’s ability to solve a confinement problem by trial and error. Int. J. Comp. Psychol. 2006, 19, 282–296. [Google Scholar]
- Orfeo ToolBox. Available online: https://www.orfeo-toolbox.org/ (accessed on 1 December 2015).
- Zhang, J.; Duan, M.; Yan, Q.; Lin, X. Automatic vehicle extraction from airborne LiDAR data using an object-based point cloud analysis method. Remote Sens. 2014, 6, 8405–8423. [Google Scholar] [CrossRef]
- Long, Y.; Liu, L. Transformations of urban studies and planning in the big/open data era: A review. Int. J. Image Data Fusion. 2016, 7, 295–308. [Google Scholar] [CrossRef]
- Zhang, J.; Lin, X. Advances in fusion of optical imagery and LiDAR point cloud applied to photogrammetry and remote sensing. Int. J. Image Data Fusion 2017, 8, 1–31. [Google Scholar] [CrossRef]
- Zha, Y.; Gao, J.; Ni, S. Use of normalized difference built-up index in automatically mapping urban areas from TM imagery. Int. J. Remote Sens. 2003, 24, 583–594. [Google Scholar] [CrossRef]
- Xu, H.; Huang, S.; Zhang, T. Built-up land mapping capabilities of the ASTER and Landsat ETM+ sensors in coastal areas of southeastern China. Adv. Space Res. 2013, 52, 1437–1449. [Google Scholar] [CrossRef]
- Li, Z.; Shi, W.; Wang, Q.; Miao, Z. Extracting man-made objects from high spatial resolution remote sensing images via fast level set evolutions. IEEE Trans. Geosci. Remote Sens. 2015, 53, 883–899. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image No. | Satellite Sensor | Bands | GSD (m) | Length × Width (Pixels × Pixels) | Location |
|---|---|---|---|---|---|
| First | GeoEye-One | Pan-sharpened RGB | 0.50 | 9700 × 8856 | Suzhou, China |
| Second | QuickBird | panchromatic | 0.61 | 20,786 × 15,448 | Tai’an, China |
| Third | QuickBird | panchromatic | 0.61 | 6904 × 6905 | Linzhi, China |
| Image No. | (m) | (m) | (°) | (m) | (Pixels) | ||
|---|---|---|---|---|---|---|---|
| First | 2.00 | 150.00 | 10.00 | 1.00 | 0.6 | 150.50 | 0.01 |
| Second | 3.05 | 91.50 | 15.00 | 1.22 | 0.7 | 122.61 | 10.00 |
| Third | 3.05 | 91.50 | 15.00 | 1.22 | - | 122.61 | 200.00 |
| Image No. | Reference (km2) | PanTex (km2) | Our Method (km2) |
|---|---|---|---|
| First | 17.352817 | 16.070800 | 16.984289 |
| Second | 75.689544 | 54.368011 | 83.012586 |
| Third | 4.115574 | 6.544921 | 7.424627 |
| Image No. | Window (Pixels × Pixels) | Binary Threshold |
|---|---|---|
| First | 100 × 100 | 0.25 |
| Second | 84 × 84 | 0.4 |
| Third | 84 × 84 | 0.37 |
| Image No. | The Method | (%) | (%) | (%) |
|---|---|---|---|---|
| First | PanTex | 94.97 | 87.96 | 84.05 |
| Our Method | 92.75 | 90.78 | 84.78 | |
| Second | PanTex | 85.56 | 61.64 | 55.69 |
| Our Method | 83.37 | 91.43 | 77.32 | |
| Third | PanTex | 96.49 | 60.68 | 59.37 |
| Our Method | 92.88 | 81.88 | 76.99 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ning, X.; Lin, X. An Index Based on Joint Density of Corners and Line Segments for Built-Up Area Detection from High Resolution Satellite Imagery. ISPRS Int. J. Geo-Inf. 2017, 6, 338. https://doi.org/10.3390/ijgi6110338
Ning X, Lin X. An Index Based on Joint Density of Corners and Line Segments for Built-Up Area Detection from High Resolution Satellite Imagery. ISPRS International Journal of Geo-Information. 2017; 6(11):338. https://doi.org/10.3390/ijgi6110338
Chicago/Turabian StyleNing, Xiaogang, and Xiangguo Lin. 2017. "An Index Based on Joint Density of Corners and Line Segments for Built-Up Area Detection from High Resolution Satellite Imagery" ISPRS International Journal of Geo-Information 6, no. 11: 338. https://doi.org/10.3390/ijgi6110338
APA StyleNing, X., & Lin, X. (2017). An Index Based on Joint Density of Corners and Line Segments for Built-Up Area Detection from High Resolution Satellite Imagery. ISPRS International Journal of Geo-Information, 6(11), 338. https://doi.org/10.3390/ijgi6110338