Visualization of Features in 3D Terrain

Abstract
:
1. Introduction
- Concepts to effectively communicate local and global features of 3D terrain and geo-spatial data.
- Design and application of depth cues that are tailored to improve perception of 3D distances in terrain environments.
- A software framework that enables real-time rendering and design of sophisticated terrain visualizations.
2. Related Work
2.1. Terrain and Geo-Spatial Data
2.2. Feature Visualization
3. Visualization of Features
3.1. Visualizing Features in Terrain Model
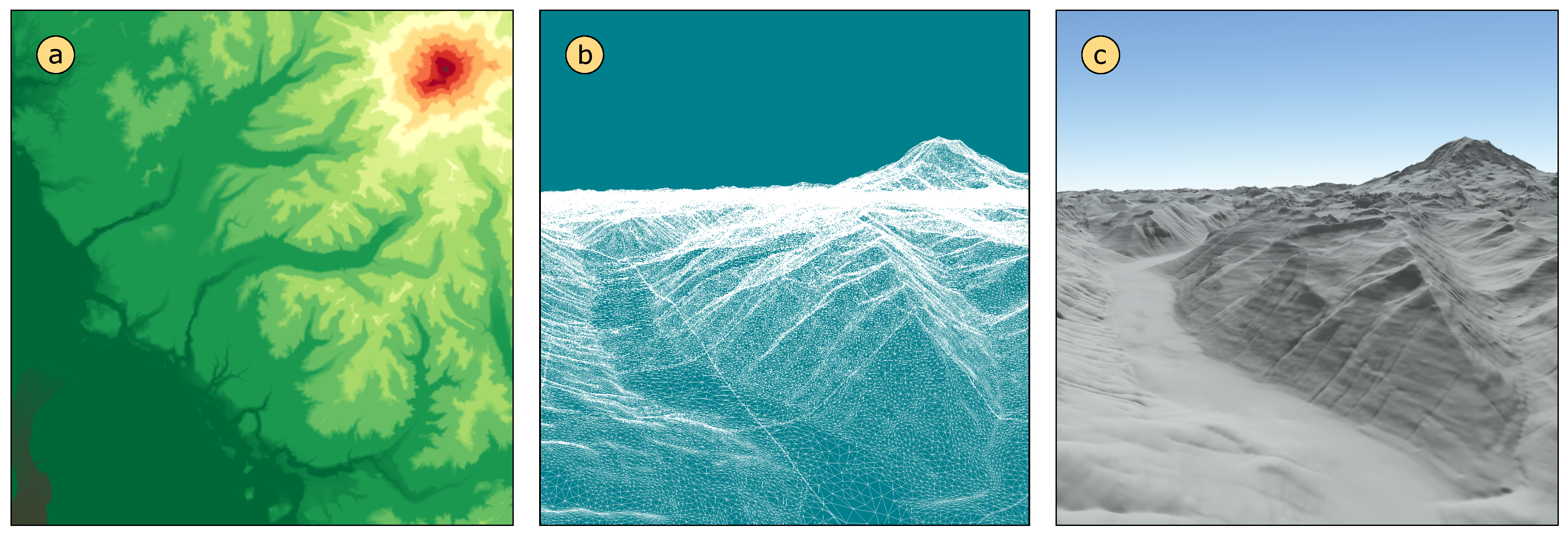
3.1.1. Representing Terrain Models
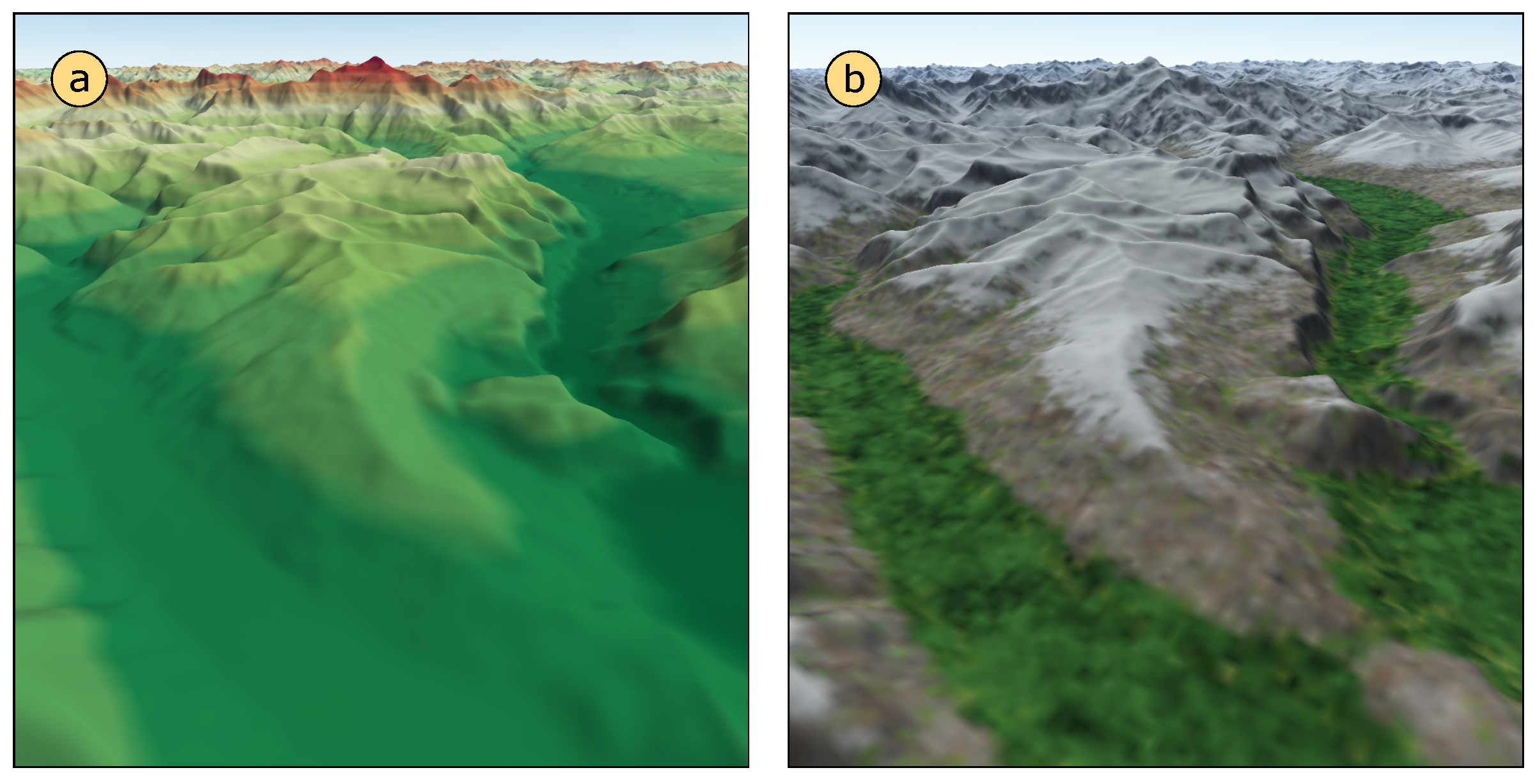
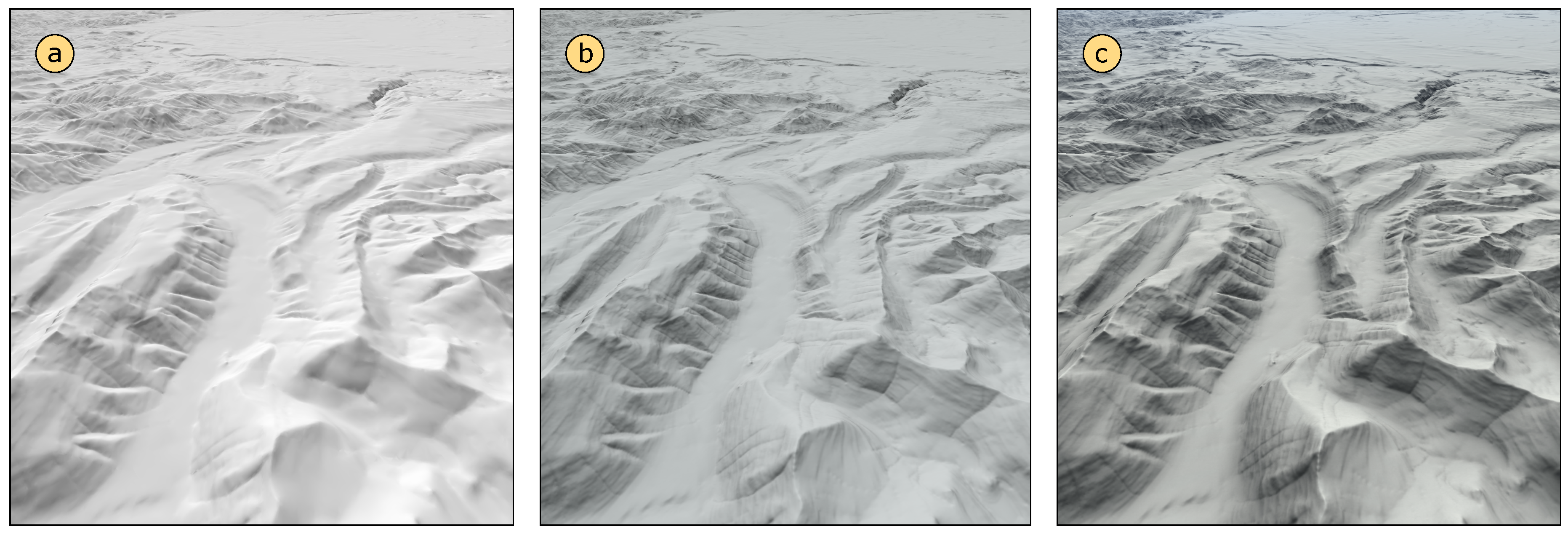
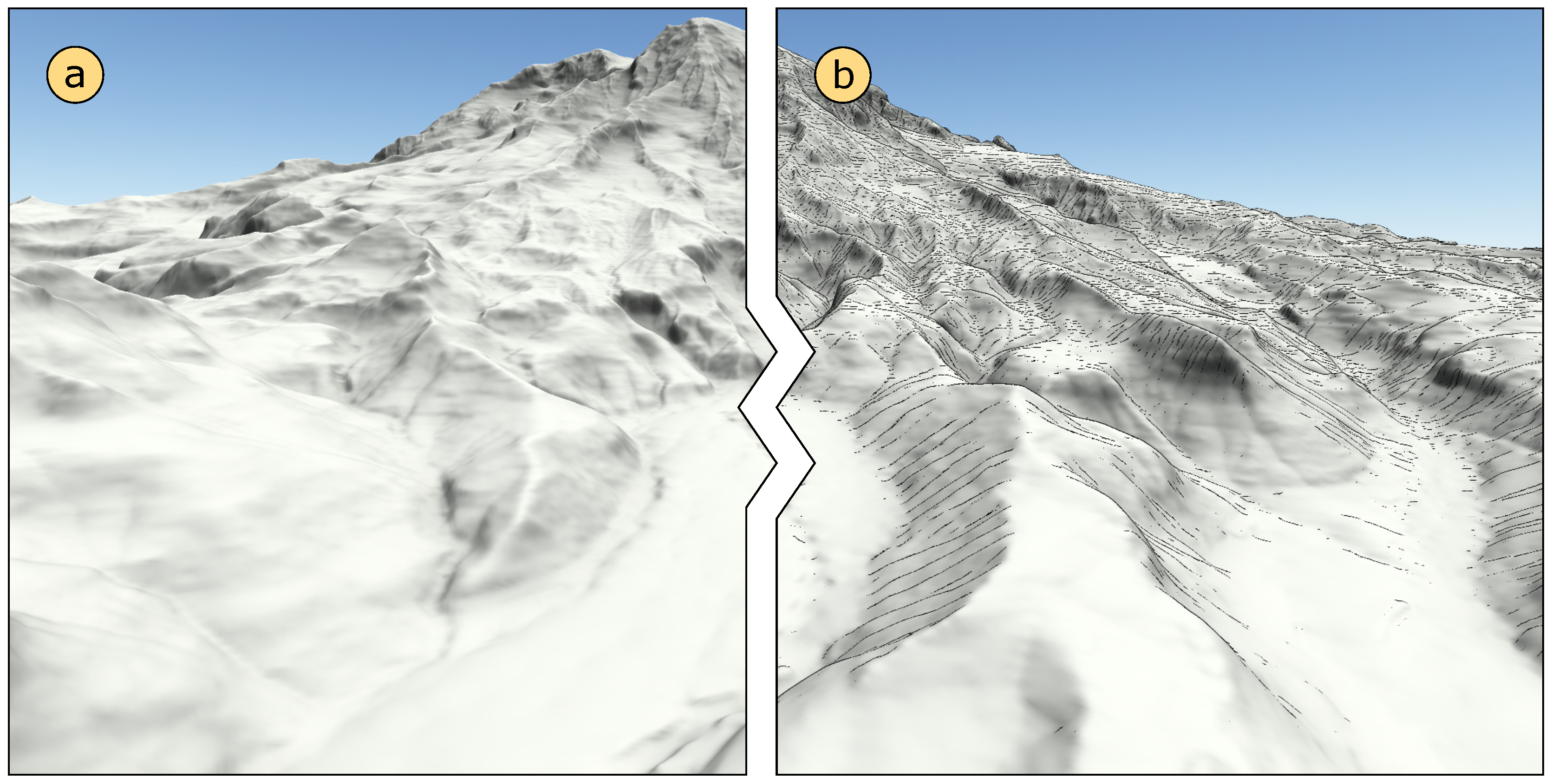
3.1.2. Emphasizing Features
3.2. Visualizing Features in Numerical Data
3.2.1. Representing Numerical Data
3.2.2. Emphasizing Features
3.3. Visualizing Features of Geometrical Data
3.3.1. Representing Geometrical Data
3.3.2. Emphasizing Features
4. Visualization Tool TedaVis
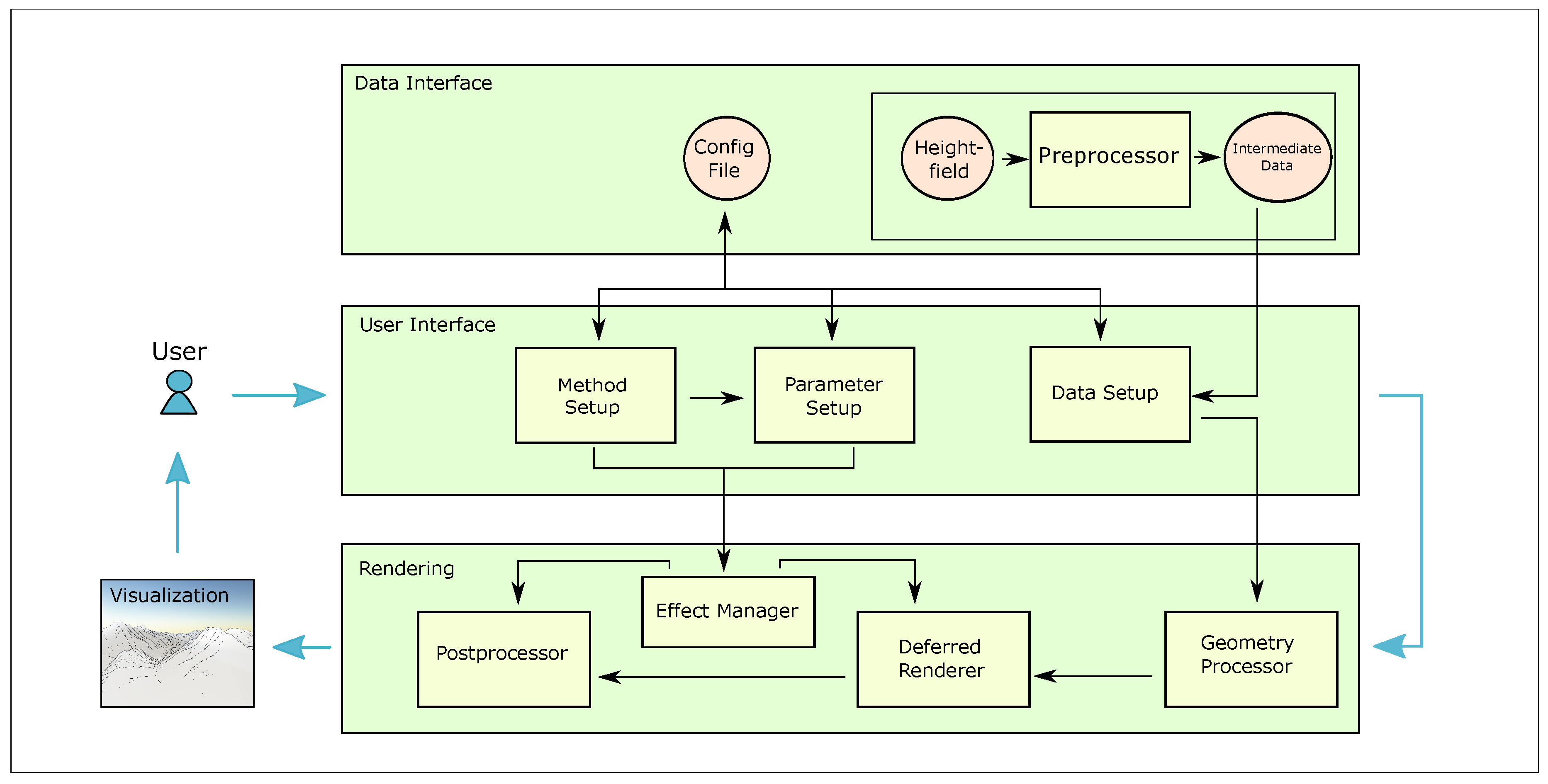
4.1. Architecture
4.1.1. Data Interface
4.1.2. User Interface
4.1.3. Rendering
4.1.4. Performance
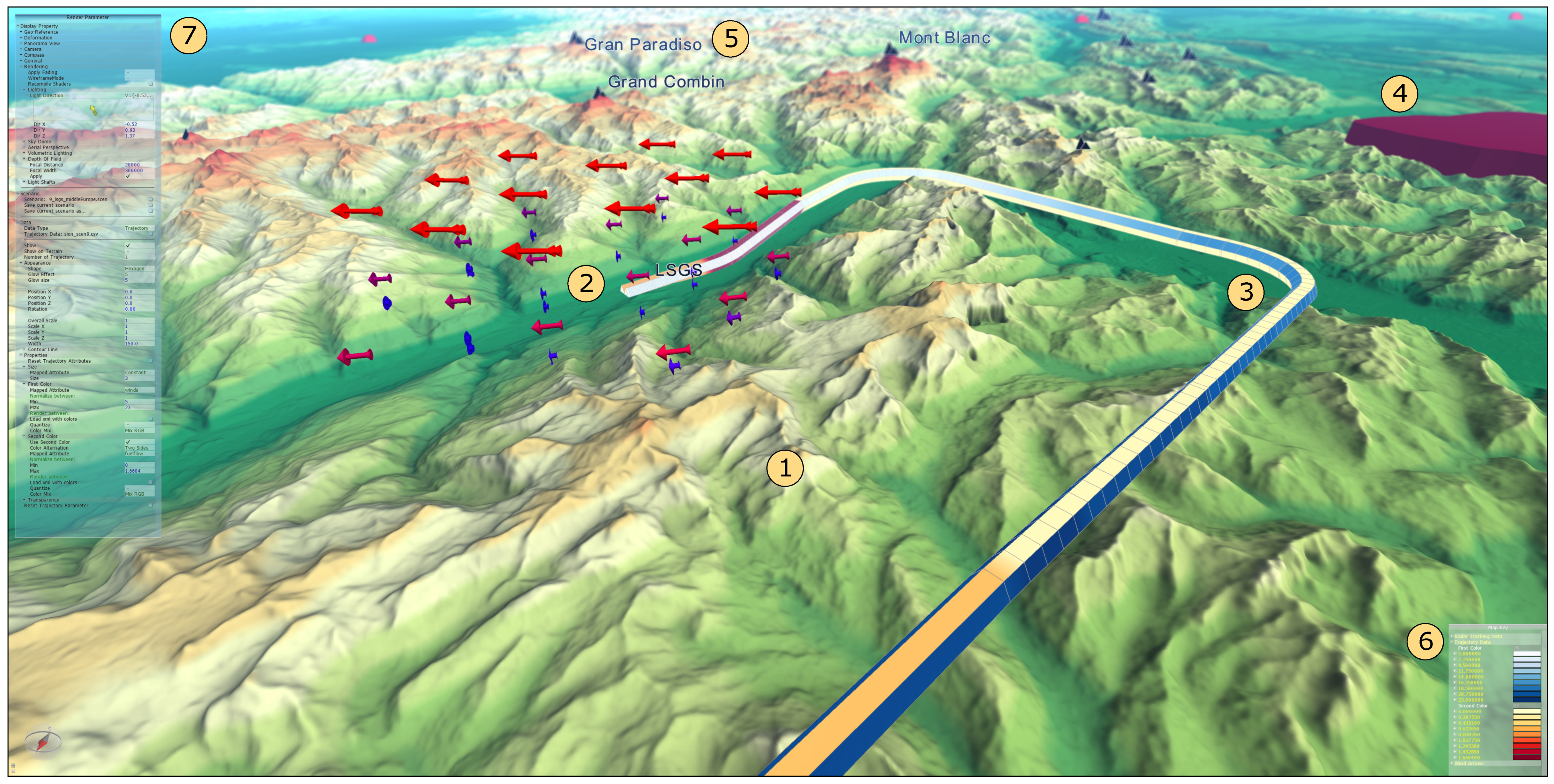
4.2. Feature Visualization Using TedaVis
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Das, S.; Patel, P.P.; Sengupta, S. Evaluation of different digital elevation models for analyzing drainage morphometric parameters in a mountainous terrain: A case study of the Supin–Upper Tons Basin, Indian Himalayas. SpringerPlus 2016, 5, 1544. [Google Scholar] [CrossRef] [PubMed]
- Doneus, M. Openness as Visualization Technique for Interpretative Mapping of Airborne Lidar Derived Digital Terrain Models. Remote Sens. 2013, 5, 6427–6442. [Google Scholar] [CrossRef]
- Wechsler, S.P. Uncertainties associated with digital elevation models for hydrologic applications: A review. Hydrol. Earth Syst. Sci. 2007, 11, 1481–1500. [Google Scholar] [CrossRef]
- Jylhä, K.; Tuomenvirta, H.; Ruosteenoja, K.; Niemi-Hugaerts, H.; Keisu, K.; Karhu, J.A. Observed and projected future shifts of climatic zones in Europe and their use to visualize climate change information. Weather Clim. Soc. 2010, 2, 148–167. [Google Scholar] [CrossRef]
- Sheppard, S.R. Landscape visualisation and climate change: The potential for influencing perceptions and behaviour. Environ. Sci. Policy 2005, 8, 637–654. [Google Scholar] [CrossRef]
- Ulrich, T. Rendering Massive Terrains Using Chunked Level of Detail Control. Available online: http://tulrich.com/geekstuff/sig-notes.pdf (accessed on 14 November 2017).
- Larsen, B.D.; Christensen, N.J. Real-time terrain rendering using smooth hardware optimized level of detail. J. World Soc. Comput. Gr. 2003, 11, 1–3. [Google Scholar]
- Petterson, F.W.L.; Hoppe, H.H. Terrain Rendering Using Nested Regular Grids. U.S. Patent 7436405, 14 October 2008. [Google Scholar]
- Kang, H.; Jang, H.; Cho, C.S.; Han, J. Multi-resolution terrain rendering with GPU tessellation. Vis. Comput. 2015, 31, 455–469. [Google Scholar] [CrossRef]
- Zhai, R.; Lu, K.; Pan, W.; Dai, S. GPU-based real-time terrain rendering: Design and implementation. Neurocomputing 2016, 171, 1–8. [Google Scholar] [CrossRef]
- DeCarlo, D.; Finkelstein, A.; Rusinkiewicz, S.; Santella, A. Suggestive Contours for Conveying Shape. ACM Trans. Gr. 2013, 22, 848–855. [Google Scholar] [CrossRef]
- Ritschel, T.; Dachsbacher, C.; Grosch, T.; Kautz, J. The State of the Art in Interactive Global Illumination. Comput. Gr. Forum 2012, 31, 160–188. [Google Scholar] [CrossRef]
- Ware, C. Information Visualization: Perception for Design; Morgan Kaufmann: Burlington, MA, USA, 2012. [Google Scholar]
- Ruzinoor, C.M.; Shariff, A.R.M.; Pradhan, B.; Ahmad, M.R.; Rahim, M.S.M. A review on 3D terrain visualization of GIS data: Techniques and software. Geo-Spat. Inf. Sci. 2012, 15, 105–115. [Google Scholar] [CrossRef]
- Stevens, K.A. Surface Perception from Local Analysis of Texture and Contour; Technical Report; Massachusetts Institut of Technology: Cambridge, MA, USA, 1980. [Google Scholar]
- Bolton, M.L.; Bass, E.J.; Comstock, J.R. Spatial awareness in synthetic vision systems: Using spatial and temporal judgments to evaluate texture and field of view. Hum. Factors 2007, 49, 961–974. [Google Scholar] [CrossRef] [PubMed]
- Haase, H.; Bock, M.; Hergenröther, E.; Knöpfle, C.; Koppert, H.J.; Schröder, F.; Trembilski, A.; Weidenhausen, J. Meteorology meets computer graphics—A look at a wide range of weather visualisations for diverse audiences. Comput. Gr. 2000, 24, 391–397. [Google Scholar] [CrossRef]
- Helbig, C.; Bauer, H.S.; Rink, K.; Wulfmeyer, V.; Frank, M.; Kolditz, O. Concept and workflow for 3D visualization of atmospheric data in a virtual reality environment for analytical approaches. Environ. Earth Sci. 2014, 72, 3767–3780. [Google Scholar] [CrossRef]
- Beck, M. Real-time visualization of big 3D city models. Int. Arch. Photogramm. Sens. Spat. Inf. Sci. 2003, 34. [Google Scholar] [CrossRef]
- Dübel, S.; Röhlig, M.; Schumann, H.; Trapp, M. 2D and 3D presentation of spatial data: A systematic review. In Proceedings of the 2014 IEEE VIS International Workshop on 3DVis (3DVis), Paris, France, 9 November 2014; pp. 11–18. [Google Scholar]
- Andrienko, N.; Andrienko, G. Exploratory Analysis of Spatial and Temporal Data: A Systematic Approach; Springer Science & Business Media: Berlin, Germany, 2006. [Google Scholar]
- Kraak, M.J.; Ormeling, F. Cartography: Visualization of Spatial Data; Guilford Press: New York, NY, USA, 2011. [Google Scholar]
- Yoëli, P. The mechanisation of analytical hill shading. Cartogr. J. 1967, 4, 82–88. [Google Scholar] [CrossRef]
- Loisios, D.; Tzelepis, N.; Nakos, B. A methodology for creating analytical hill-shading by combining different lighting directions. In Proceedings of the 23rd International Cartographic Conference, Moscow, Russia, 4–10 August 2007; p. 78. [Google Scholar]
- Dowson, K. Towards Extracting Artistic Sketches and Maps from Digital Elevation Models. Ph.D. Thesis, University of Hull, Hull, UK, 1994. [Google Scholar]
- Zakšek, K.; Oštir, K.; Kokalj, Ž. Sky-view factor as a relief visualization technique. Remote Sens. 2011, 3, 398–415. [Google Scholar] [CrossRef]
- Hesse, R. LiDAR-derived Local Relief Models—A new tool for archaeological prospection. Archaeol. Prospect. 2010, 17, 67–72. [Google Scholar] [CrossRef]
- Kennelly, P.J.; Stewart, A.J. General sky models for illuminating terrains. Int. J. Geogr. Inf. Sci. 2014, 28, 383–406. [Google Scholar] [CrossRef]
- Bratkova, M.; Shirley, P.; Thompson, W.B. Artistic rendering of mountainous terrain. ACM Trans. Graph. 2009, 28, 1–17. [Google Scholar] [CrossRef]
- Omasits, U.; Ahrens, C.H.; Müller, S.; Wollscheid, B. Protter: Interactive protein feature visualization and integration with experimental proteomic data. Bioinformatics 2014, 30, 884–886. [Google Scholar] [CrossRef] [PubMed]
- Post, F.H.; Vrolijk, B.; Hauser, H.; Laramee, R.S.; Doleisch, H. The State of the Art in Flow Visualisation: Feature Extraction and Tracking. Comput. Gr. Forum 2003, 22, 775–792. [Google Scholar] [CrossRef]
- Liu, P.; Gong, J.; Yu, M. Visualizing and analyzing dynamic meteorological data with virtual globes: A case study of tropical cyclones. Environ. Model. Softw. 2015, 64, 80–93. [Google Scholar] [CrossRef]
- Cockburn, A.; Karlson, A.; Bederson, B.B. A Review of Overview+Detail, Zooming, and Focus + Context Interfaces. ACM Comput. Surv. 2009, 41, 2:1–2:31. [Google Scholar] [CrossRef]
- Tominski, C.; Gladisch, S.; Kister, U.; Dachselt, R.; Schumann, H. A Survey on Interactive Lenses in Visualization. In EuroVis State-of-the-Art Reports; Eurographics Association: Lyon, France, 2014; pp. 43–62. [Google Scholar]
- Hauser, H. Generalizing Focus+Context Visualization. In Scientific Visualization: The Visual Extraction of Knowledge from Data; Springer: Berlin/Heidelberg, Germany, 2006; pp. 305–327. [Google Scholar]
- Richter, C.; Dübel, S.; Schumann, H. Visual Analysis of Geo-spatial Data in 3D Terrain Environments using Focus + Context. In EuroVis Workshop on Visual Analytics (EuroVA); Sedlmair, M., Tominski, C., Eds.; Eurographics Association: Lyon, France, 2017. [Google Scholar]
- Hall, K.W.; Perin, C.; Kusalik, P.G.; Gutwin, C.; Carpendale, S. Formalizing Emphasis in Information Visualization. Comput. Gr. Forum 2016, 35, 717–737. [Google Scholar] [CrossRef]
- Dübel, S.; Middendorf, L.; Haubelt, C.; Schumann, H. A Flexible Architecture for Ray Tracing Terrain Heightfields. In Proceedings of the International Summerschool on Visual Computing, Rostock, Germany, 17–21 August 2015. [Google Scholar]
- Phong, B.T. Illumination for Computer Generated Pictures. Commun. ACM 1975, 18, 311–317. [Google Scholar] [CrossRef]
- Pharr, M.; Green, S. Ambient occlusion. GPU Gems 2004, 1, 279–292. [Google Scholar]
- Sloan, P.P.; Kautz, J.; Snyder, J. Precomputed Radiance Transfer for Real-time Rendering in Dynamic, Low-frequency Lighting Environments. ACM Trans. Graph. 2002, 21, 527–536. [Google Scholar] [CrossRef]
- Oat, C.; Sander, P.V. Ambient aperture lighting. In Proceedings of the 2007 Symposium on Interactive 3D Graphics and Games, Seattle, WA, USA, 2 May–29 April 2007; pp. 61–64. [Google Scholar]
- Nowrouzezahrai, D.; Snyder, J. Fast Global Illumination on Dynamic Height Fields. In Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2009; Volume 28, pp. 1131–1139. [Google Scholar]
- Shishkovtsov, O. Deferred shading in stalker. GPU Gems 2005, 2, 143–166. [Google Scholar]
- Hoffman, N.; Preetham, A.J. Rendering Outdoor Light Scattering in Real Time. In Proceedings of the Game Developer Conference, San Francisco, CA, USA, 21–23 March 2002; Volume 2002, pp. 337–352. [Google Scholar]
- Dübel, S.; Röhlig, M.; Tominksi, C.; Schumann, H. Visualizing 3D Terrain, Geo-spatial Data, and Uncertainty. Informatics 2017, 4, 6. [Google Scholar] [CrossRef]
- Doleisch, H.; Gasser, M.; Hauser, H. Interactive Feature Specification for Focus + Context Visualization of Complex Simulation Data. In Proceedings of the Symposium on Data Visualisation 2003, Grenoble, France, 26–28 May 2003; Eurographics Association: Aire-la-Ville, Switzerland, 2003; pp. 239–248. [Google Scholar]
- Trapp, M.; Schneider, L.; Holz, N.; Döllner, J. Strategies for visualizing points-of-interest of 3D virtual environments on mobile devices. In Proceedings of the 6th International Symposium on LBS and TeleCartography, Nottingham, UK, 2–4 September 2009; Springer: Berlin, Germany, 2009. [Google Scholar]
- Carpendale, M. Considering Visual Variables as a Basis for Information Visualisation; Technical Report; University of Calgary, Department of Computer Science: Calgary, AB, Canada, 2003. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Max. # Triangles | FPS | ⌀ Render Time |
|---|---|---|---|
| Kauai (≈0.5 GB) | ≈3.2 Mio | 342∼563 | 2.2 ms |
| Central Europe (≈12 GB) | ≈6.0 Mio | 267∼488 | 2.6 ms |
| +numerical data | ≈7.5 Mio | 168∼254 | 4.7 ms |
| +geometrical data | ≈7.6 Mio | 128∼199 | 6.1 ms |
| +atmospheric effects | ≈7.6 Mio | 64∼78 | 14.1 ms |
| +volumetric lighting | ≈7.6 Mio | 58∼72 | 15.4 ms |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dübel, S.; Schumann, H. Visualization of Features in 3D Terrain. ISPRS Int. J. Geo-Inf. 2017, 6, 357. https://doi.org/10.3390/ijgi6110357
Dübel S, Schumann H. Visualization of Features in 3D Terrain. ISPRS International Journal of Geo-Information. 2017; 6(11):357. https://doi.org/10.3390/ijgi6110357
Chicago/Turabian StyleDübel, Steve, and Heidrun Schumann. 2017. "Visualization of Features in 3D Terrain" ISPRS International Journal of Geo-Information 6, no. 11: 357. https://doi.org/10.3390/ijgi6110357
APA StyleDübel, S., & Schumann, H. (2017). Visualization of Features in 3D Terrain. ISPRS International Journal of Geo-Information, 6(11), 357. https://doi.org/10.3390/ijgi6110357