1. Introduction
Natural hazards such as earthquakes cause large-scale casualties, injuries and the destruction of housing in residential areas [
1,
2]. Nowadays, smart systems with acceptable coherence and flexibility are essential. Using simulators allows for the analysis of different strategies in dealing with crises and optimizes the decision-making, while ultimately minimizing losses [
3]. Applying an agent-based simulation model to earthquake search and rescue operations can be a good alternative to traditional decision-making methods.
Multi agent systems (MASs) making it possible to simulate building demolition, damage to urban infrastructure, injuries, search and rescue teams [
4]. MASs deal with complex systems by emphasizing the interaction between agents and dividing the system into sub-sectors of the environment and other actors [
5]. Task allocation plays an important role in coordinating an MAS within a set of agents [
6,
7]. Appropriate allocations are critical for the efficient implementation of tasks undertaken in natural hazard environments. Proposing a proper approach to consider uncertainty in task allocations plays an important role in decision-making with regard to urban search and rescue (USAR) operations in crisis-stricken areas [
8].
Earthquakes involve specific conditions and origins of uncertainty, which should be considered in USAR task allocation [
9]. In traditional USAR models for disaster environments, task allocation is based on consistent information about the environment [
7], while USAR is generally on a large scale and involves many uncertainties [
10]. Assuming coordination in environments with no uncertainty is essentially an unrealistic scenario [
11]. One of the major problems regarding the planning of rescue operations concerns uncertain conditions, which have considerable influence on initial planning and operationalizing a plan. Despite the findings of various projects, no solution has been found, which meets the various and important needs of task allocation in natural disaster environments in real-time [
12]. In task allocation, each agent encounters different risks, which must be considered in the decision-making process. Therefore, in the context of task allocations, each agent should consider uncertainties in their decision-making process [
13].
The present study pursues two main objectives. The first is to develop a dynamic agent-based simulation model for USAR operations after an earthquake. The agent-based simulator system is based on the simulation of a 6.6 magnitude earthquake in Tehran’s District 3 to observe the performance of a search and rescue operations system. The developed system provides a tool, which, by illustrating the search and rescue operations involved, can predict the collaboration of existing agents in order to plan and make decisions at critical moments. The second objective is to provide a method for task allocation by combining the on contract net protocol (CNP) and the Technique for Order of Preference by Similarity to Ideal Solution (TOPSIS) to establishing collaboration among agents, while taking uncertainty in environmental information into account.
The main innovation of this research is to present a method that is appropriate to measure the uncertainties in post-earthquake USAR operations for task allocation and collaboration among agents using the interval-based TOPSIS method. On the other hand, given that most of the developed methods of collaboration are studied in laboratory conditions, a real simulation is used for allocation in the current study and the performance of the proposed method is examined in the form of a real simulation in order to consider the appropriateness of the proposed method with included application.
The paper is organized as follows. Previous studies on earthquake-related USAR and theoretical insights are provided in
Section 2, with reference to geospatial information system (GIS) analysis and building damage assessment and task allocation methods, all of which were employed in the present study. In
Section 3 the case study is presented.
Section 4 is dedicated to an explanation of the proposed methodology in four sub-steps, while the results obtained from computer simulations of USAR operations are summarized in
Section 5. Lastly, the conclusion to this research is presented in
Section 6.
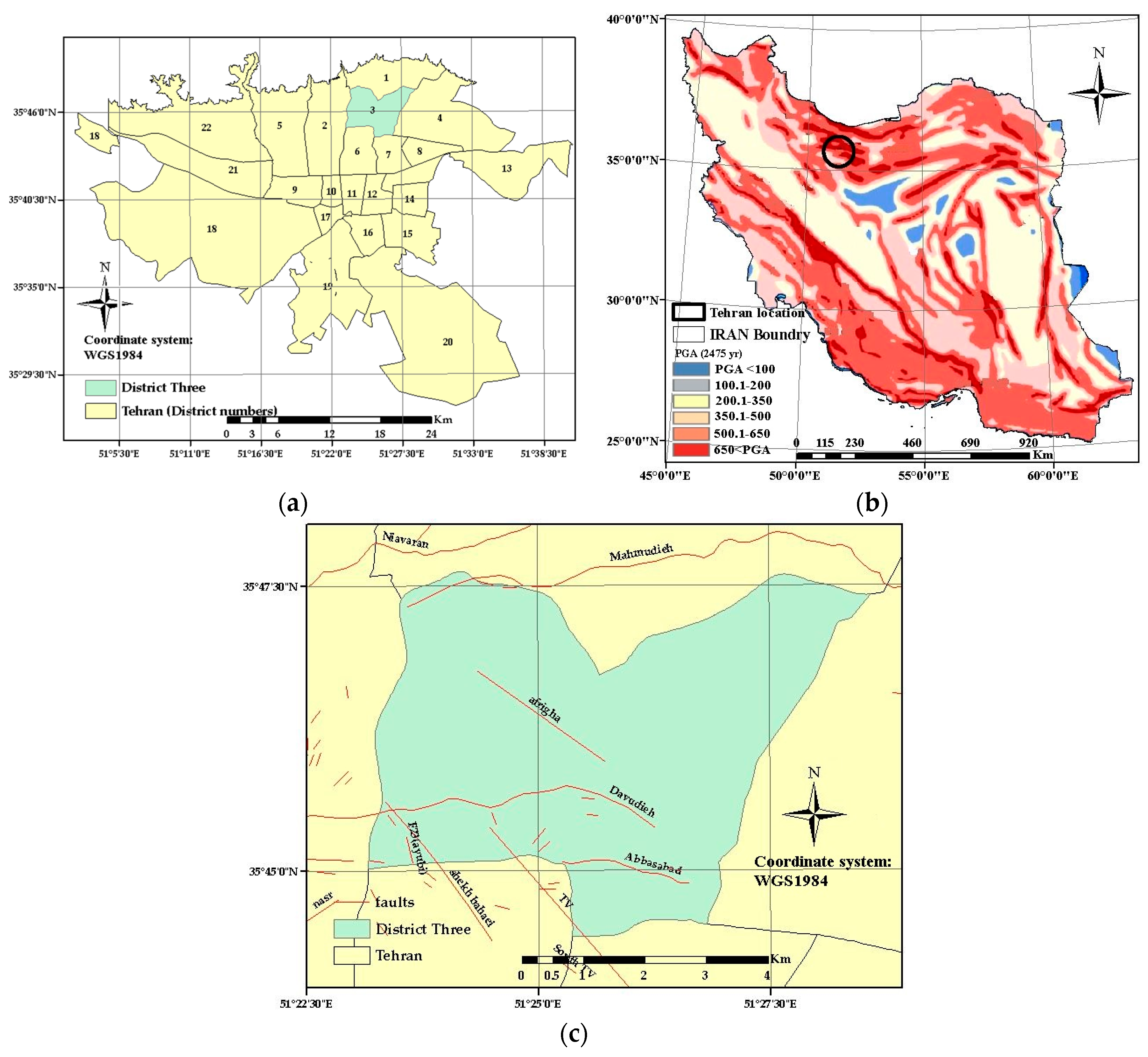
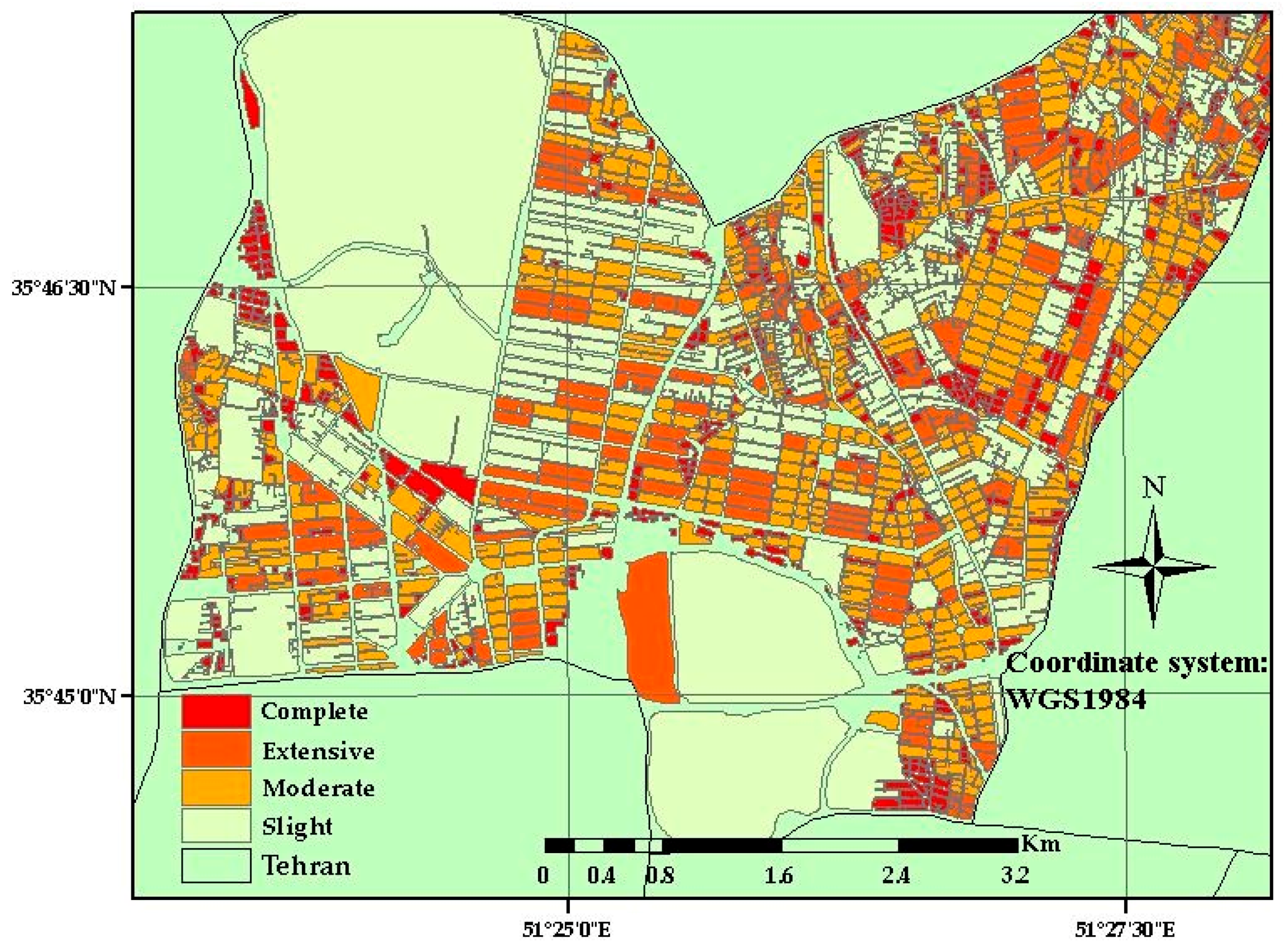
3. Case Study and Data
In order to assess the capability of the presented approach, it has been applied to estimate the seismic risk in District Three in the city of Tehran, the capital and political center of Iran. District 3 located in north of Tehran, has an area of around 208 km/m
2 and has a population of over 314,112. It is located in Zone 39N UTM (
Figure 1).
Iran is considered to be the seismic region of the world (
Figure 1). Tehran, as the capital of Iran, is located on multiple faults. Besides the vulnerability of structures in Tehran, the rapid growth of urbanization has increased the vulnerability of most districts [
37]. A major portion of District 3 has a semi-rural fabric. The building’s type in this area is fully compatible with the model used to calculate the vulnerability of buildings and the number of injured people. As shown in
Figure 1, District three is a highly seismic area. The proposed methodology can be implemented for all other areas, if data is available. Seismologists believe that a strong earthquake may occur in the near future in Tehran, which is home to millions of inhabitants, [
37]. The Niavaran Fault is one of the city’s biggest faults which located in North of Tehran. This fault has a length of 43 km. The recent earthquake in Tehran had a magnitude of less than 4.6 on the Richter scale. The last major earthquake in Tehran (as high as 6.5) was in 1830. The magnitude of the earthquakes predicted by the International Institute of Seismology and Earthquake Engineering of Iran is 7.2 for the North Tehran fault and 6.6 for the Niavaran faults on the Richter scale. This difference in severity is due to the difference in the length of the faults. New research shows that there is more evidence of activity along the Niavaran Fault, compared to the North Tehran Fault [
38]. For this purpose, the Niavaran Fault scenario is selected.
In the current study, a GIS system was used for data preparation, data entry in software and the creation of an environment for simulation. There are two important parts in preparing the environment to simulate search and rescue operations, such as simulating the earthquake-damaged environment and the dispersion of agents. The basic data used in the application are block maps, population, distance from fault, building material, agents’ location, buildings’ year of construction and building height. The primary location of the injured agent is based on building damage, while population loss assessments and the location of the search agent group, the rescue group and medical groups were randomly generated in four vector maps.
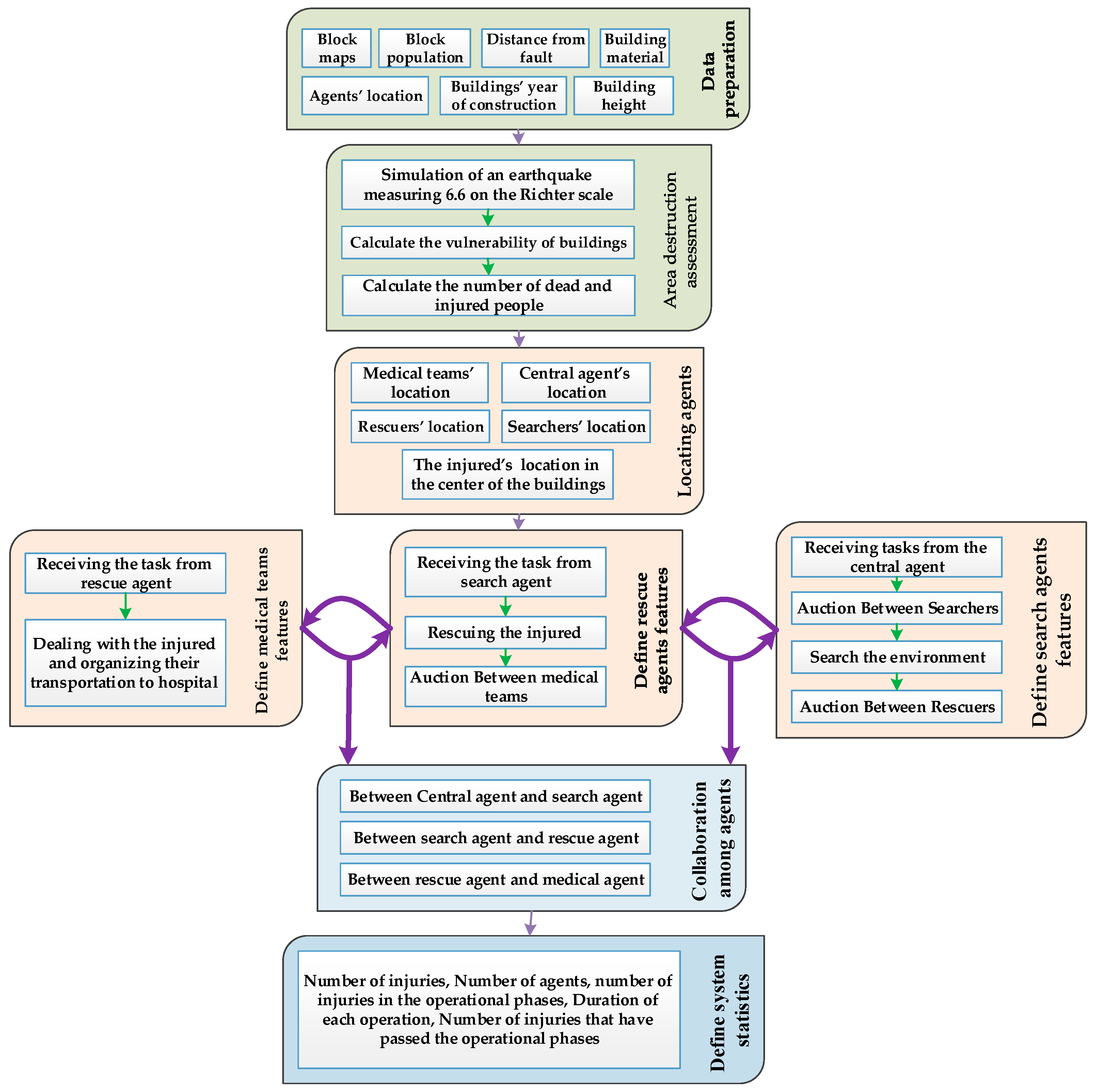
4. Methodology
The steps for creating and implementing a proposed simulation system are summarized in
Figure 2.
This study requires the implementation of three main parts. The first step consists of preparing the data in the ArcGIS environment and calculating the damage rate of the area, simulation of the agent-based system which include locating the agents in the environment, defining their characteristics and, ultimately, implementing the proposed method for collaboration between agents and specifying statistics in order to obtaining the status of the system and assessing the capability of the proposed method. The methods used to implement each section are described below.
4.1. Building Damage Assessment
The purpose of this section is to predict the vulnerability of the buildings and the number of injured people in an earthquake. This paper uses a methodology that was applied during a research project at the International Institute of Seismology and Earthquake Engineering of Iran. The model was developed during a collaborative project between the Japan International Cooperative Agency (JICA) and the Center for Earthquake and Environmental Studies of Tehran (CEST). It is a local project in Iran and is known as the JICA project. The output of this plan is presented in Mansouri et al. (2008). The model is also used in [
39,
40].
JICA model provides a structural vulnerability estimation at four levels of failure (slight, moderate, extensive and complete). According to characteristics of buildings and the magnitude of an earthquake in the buildings’ location, each building can be placed within a level of failure [
25]. The methodology has four major stages: namely, seismic hazard assumption as an input, building inventory development, building and human vulnerability function developments and implementations, and, finally, the production of results in a GIS. The inputs of the model are building material, building height, a building’s year of construction, distance from the fault, and parcel maps and fragility curves. To calculate the number of injured people, building population was used.
After the earthquake in Bam, a human vulnerability model was also developed using structural damage vulnerability and collected data on human-structural mortality. In order to implement the model, it is sufficient to know the population living on a construction site at the time of the earthquake. Using the results obtained while estimating the structural damage, the number of dead, injured and uninjured people is calculated. For human vulnerability, Equation (1) is used [
25]:
Based on the above formula, human casualties are calculated at three levels (uninjured, injured and dead). For each building block, the number of damaged buildings is entered into the formula.
4.2. Simulation of the Agent-Based System
Based on the scenario of a simulated system, the earthquake first occurs in a definite position and with definite severity. Buildings damage and the number of injured people are simulated. In an actual search and rescue operation, there is no accurate information on damaged buildings, the number of injuries, injury rates and other environmental parameters. Initially, the central agent prioritizes tasks based on information obtained from the environment and assigns each task to the nearest agent to injure. The relevant agent establishes an auction among the other nearby search teams and selects the most appropriate group. After visiting and searching the environment, if the selected group finds an injured individual, they try to choose the most appropriate group among the rescue agents by using tender and decision-making uncertainties and assign the rescue of the injuries to that group. The selected rescuer moves to the environment and rescues people from the rubble, as well as chooses the best medical team from among the existing teams through a tender for primary medical care, before the rescued are transferred to the hospital or service centers.
In the present study, with regard to previous studies [
8,
9,
11] and expert advices in post-earthquake search and rescue (SAR), various uncertainties were regarded in each stage of the assignment of tasks or collaboration.
Table 3 lists common uncertainties in the tasks prioritizing and the uncertainties in each stage of task allocation and cooperation. Decision-making weights in the tasks prioritizing and task allocation can be directly chosen by the decision maker, or by using methods such as pair-wise comparisons in AHP. In this case, weights were calculated on the basis of expert’s opinions by Analytic hierarchy process (AHP). An AHP defines a set of criteria and sub-criteria arranged in a hierarchy in order to make pairwise comparisons and find the weights of the criteria or decision alternatives.
The proposed multi-agent system consists of five groups including independent agents, injured agent, central agent, search agent, rescue agent and medical team. These agents are independent entities which can move and assess the environment and examine the status of their neighbors. Each agent represents a physical entity of search and rescue operations, which includes one or more planning and decision-making functions. These agents (except for the injured agent) are independent and rational which can communicate with each other and have full authority in declaring their parameters for participating in tender in interval form. All five used agents are spatial, which means that they are distributed over a geo-referenced environment and have two-dimensional locations. In the present study, preventing injuries involves the cooperation between four types of agents. Collaboration between different agents is required to complete the search and rescue operation among the various agents present in the environment. Each of the agents has a specific task as follows:
Central agent: Sorting the tasks in order of priority, determining the nearest search agent, evaluating the different subgroups of search agents, announcing the assigned task to the nearest rescue agents.
Search agents: Responsible for the environment search and finding the traumatized agents, holding a searcher allocation auction (sending the proposed task to the subgroups of search agents, receiving bids from the subgroups of search agents), sending the group qualification and order for the agents to the searcher auctioneer, responsible for the rescuer find auction, sending the work errors to the responsible search agent.
Rescue agents: Responsible for rescuing injuries from the debris, identifying the feature intervals and announcing them to the coordinator agent, responsible for medical find auction, sending the work errors to the responsible search agent.
Medical agents: Responsibility for providing medical services and transferring injured to hospital, Identifying the features intervals and announcing to the coordinator agent, Sending the work errors to the responsible search agent.
Injured agents: Residing in the environment, this is not smart, changing the critical condition. In the simulator systems, the use of more maps and parameters leads to more accurate results. However, in many conditions, utilizing more criteria and parameters only complicates the problem. Therefore, the current study tried to simulate the performance of the search group, rescue group and the medical team in order to model the earthquake environment. Two main issues should be taken into consideration when designing agent-based simulations in the form of search and rescue operations. The first is related to preparing the simulation environment damaged by the earthquake while the second is concerned with designing agents and establishing the relationships among the agents. In this study, the model presented by the Japan International Cooperation Agency (JICA) and the Center for Earthquake and Environmental Studies of Tehran (CEST) studies was used to simulate the earthquake environment. We use the output functions to estimate the amount of damages considering that it is suitable for buildings in Iran. A developed method is used to establish cooperation among agents. In the following, the methods used to simulate the earthquake environment and the proposed method for establishing cooperation among the agents is described.
4.3. Proposed Task Allocation Method
The proposed approach in the present study is not specific to a particular phenomenon and subject, but due to the included uncertainties, it is appropriate to search and rescue operations after an earthquake. In the current study, a method is presented with regard to environmental uncertainties when assigning tasks and establishing collaboration between agents. The proposed method can be used for task allocation and collaboration between agents.
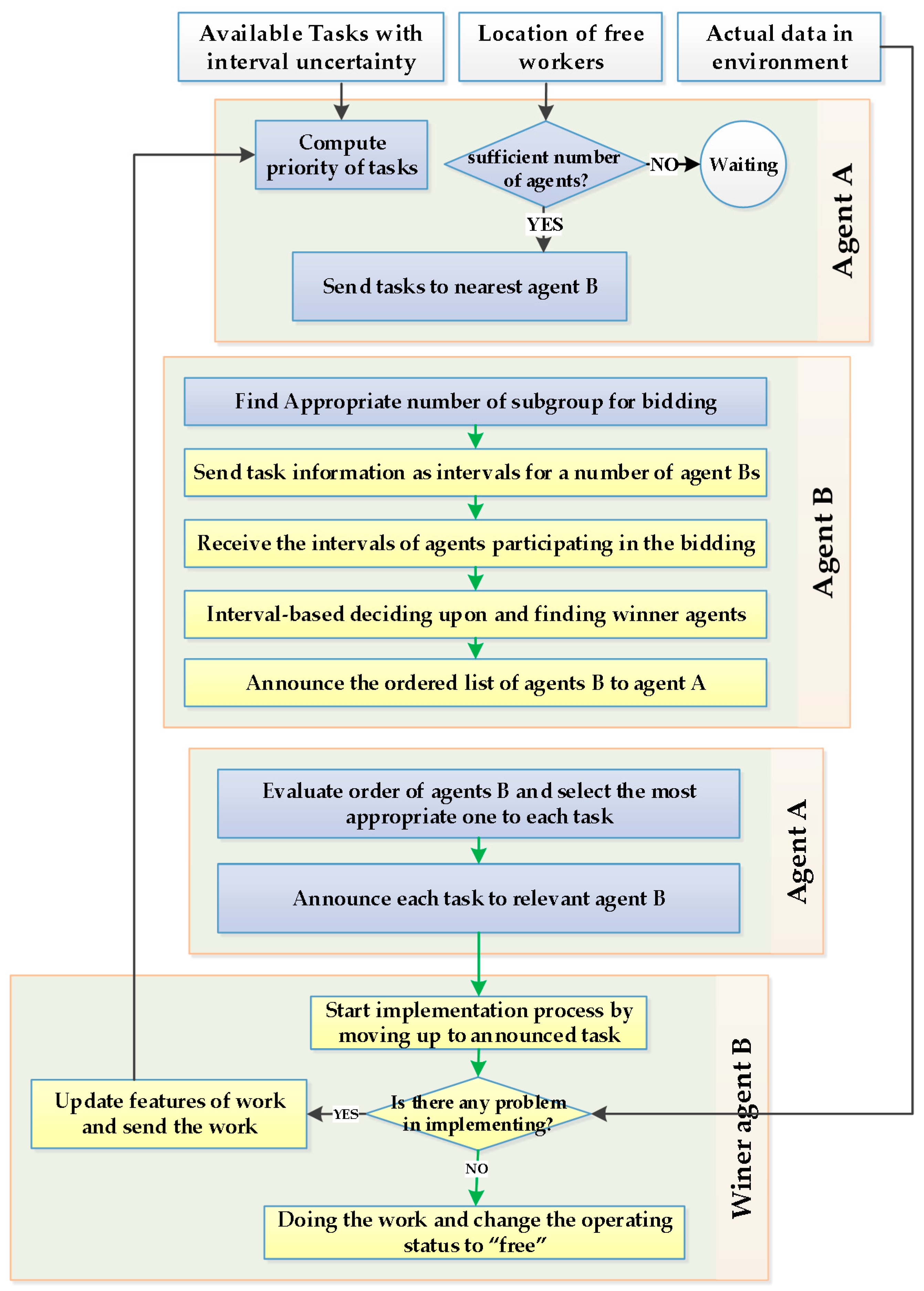
Figure 3 illustrates the process of assigning a set of tasks to a set of agents, despite the presence of uncertainty in the information. The proposed method is general and depends on the interaction between two agents, A and B. In this case, Agent A is assumed to have a set of tasks, as well as wanting to select a set of Agents B for these tasks.
It is assumed that the environment consists of a set of tasks (uncertain and exact characteristics of tasks) and agents dispersed across it. The proposed method is described in the following steps.
4.3.1. Sorting the Tasks and Determining the Auctioneer
Initially, central agent as Agent A, with a set of tasks, prioritizes the existing tasks. Usually, the tasks should be performed in the order of priority. In natural hazards, the priority given to saving an injured person depends on different factors. Four parameters (number of injuries, severity of the victims’ injuries, duration of the operation and infrastructure priorities) are defined for each task in interval form. Earthquake prediction models are used to create the initial task list. Considering the fact that there is no accurate information about the number of injuries, the severity of injuries, the duration of operations and the infrastructure priorities, after obtaining the value for each of the characteristics, the numbers are converted into intervals in terms of expert opinions. In this study, using the International Institute of Seismology and Earthquake Engineering of Iran model, the number of victims was calculated in each block (a number such as X was calculated). Then, in order to create interval values and simulate uncertainty in the environment of the data (for example, 30% uncertainty in the information), the first and second values of the interval were created randomly between [X, X + 30%X] and [X − 30%X, X]. In this phase, those tasks that receive a higher score from the interval-based TOPSIS method are performed before other tasks. The weight of parameters of number of injuries, severity of victims’ injuries, duration of operation and infrastructure priorities in TOPSIS method were considered 0.35, 0.2, 0.31 and 0.14, respectively.
After the ordering of the tasks by central agent (Agent A), the closest searcher agent (Agent B) is chosen as the auctioneer. Central agent then sends a message to the auctioneer about the work features. Searcher agent (Agent B) tries to conduct a tender for each job because the overhead of the information decreases in this case. On the other hand, the uncertainty decreased in the communications, due to the proximity of the agent to the disaster environment.
4.3.2. Selecting the Sub-Group Agents of the Tender
There are two important factors to consider when selecting individuals for the subgroup conducting the tender: the spatial distance and the absence of free agents for search and rescue operations. Each task should be assigned to the agents at a proportional distance. Failure to observe this hint results in excessive movement of forces and wasted operational time, as well as disturbing the uniform distribution of agents. Therefore, the spatial condition should be defined for agents of the subgroups and agents participating in a tender at a specified distance (e.g., 1 km from their place duty). On the other hand, in crisis-stricken environments, the number of duties is always more than the number of individuals in a search and rescue team. Thus, there are always no free agents in the region to participate in the tender. Accordingly, the tasks are performed by search agents over a long period of time, while the tasks are not allocated to rescue agents until they become free from duty. In order to solve this problem, the free condition is not defined as Boolean for agents. In other words, if there is no free agent in the tender area, the tender is held among the agents that are not free and require a period of time to complete their duties. In this circumstance, the agents winning the tender have less time to finish their duty and are superior in terms of certain parameters such as agent energy, route status, task runtime by agents and risk level for agents. In this study, for the purpose of holding any tender, a distance of 1 km for each task was considered as a range for selecting agents. First of all, this represents an attempt to assign tasks to free agents within this range of 1 km. If there is no free agent, allocation is performed between the busy agents.
4.3.3. Auction Phase
In this phase, the CNP algorithm is used, in which uncertainty is reflected. A CNP is an important coordination technique for assigning tasks and sources of establishing collaboration among agents. The four steps of a CNP are as task(s) recognition, task(s) announcement, receive offers and allocate tasks. After receiving work features, Agent B holds the tender and announces the task to the subgroup agents, which are B types. Each agent in the subgroup estimates the level of risk, energy reduction, the route condition and the task runtime, according to the characteristics of the assigned task, such as its location, and sends the corresponding interval to the coordinating agent. Then, searcher agent (Agent B) sorts the agents for the requested task and identifies the priorities using the interval-based TOPSIS method. The weight of decision—making parameters, the level of risk, energy reduction, the route condition and the task runtime, in TOPSIS were considered 0.22, 0.24, 0.18 and 0.36, respectively.
Since each of the subgroup agents may be a subgroup or a coordinating agent in another group, the answers should be sent to central agent (Agent A). Therefore, each nearest agent sends the priority of the agents along with the estimated time needed to perform a task, to central agent (Agent A).
4.3.4. Evaluating the Results of the Tenders and Selecting the Most Appropriate Agent
The central agent (Agent A), after obtaining all the coordinator agents’ lists, assigns high-priority tasks to agents that have given the best estimate for the job. Then the central agent eliminates that task and agents from all lists, and continues to allocate tasks with existing free agents. After that the allocation process continues by assigning low-priority tasks, while the other remaining tasks are gradually allocated. Therefore, the allocation process continues by assigning low-priority tasks, while the other remaining tasks are gradually allocated. According to this strategy, searcher agent (Agent B) provides local optimality, while the central agent (Agent A) is responsible for global optimality.
4.3.5. Implementation and Observation of Environmental Uncertainties
Each of the uncertainties included in the decision-making process can be reflected in the real environment while performing the tasks. With this assumption, the working environment of the agents must be simulated in USAR operation by the central agent. In the working environment, there is only one number for each parameter of task. In this research, a random number is chosen to model the working environment in a range of numbers [X − 30%, X + 30%].
After beginning the task, the agent observes the difference between the uncertainties that are presented from their point of view and in the working environment. In some cases, the uncertainties are located within an anticipated domain and not affecting the results. In other cases, one should select between accepting the delay and rescheduling. For example, the agent estimates a time interval (15–21) to reach the injured person for a certain task and wins the auction. In the working environment, the agent’s arrival time may not occur within the estimated interval. In this case, the agent may refuse to perform the task due to the complexity of the working environment. Therefore, the uncertainties are updated and the task is sent back to the central agent, which considers the new uncertainties of the environment for reallocation. Various conditions are established for the agent that reallocates the tasks, if the working environment is different from its prediction. For example, the agent can refuse to perform the task if, among the eight parameters on which their decision was-based, three items have a margin of 5% and/or four items are out of the interval range. Otherwise, the task is ended by accepting the delay in the process.
The proposed method can be used to establish cooperation between two agents, A and B, on a task, in which Agent A has a task and wants to assign this task to Agent B, as shown in
Figure 3. In this case, given that there is only one duty, there is no need to arrange tasks. Therefore, the first step removed and the interval auction is held to establish cooperation between agents.
4.4. System Evaluation
An appropriate simulator system should provide an instantaneous control of the system. Thus, the statistics should be considered to reflect the system’s momentum status. As shown in
Table 4, in the developed search and rescue simulator system statistics were defined for each of the available agents in order to obtain the result of the simulation process and the capability of the proposed method at any moment.
Due to the complex nature of the phenomena modeled by the agents, the validation of the designed agent-based models has always been regarded a challenge for researchers in this field. Given that there are no ground data on task allocation and cooperation between rescue teams in USAR operations, an evaluation of the proposed method with ground data is not possible. The simulation of the interaction between the agents is an evaluation method.
In multi agent systems, there is no fixed criterion for all agents. Reducing the casualties and the timing of the conclusion of an operation are considered as the main objectives in rescue simulation systems. According to recent studies [
6,
9,
11], two performance criteria of profitability were mentioned in order to focus on the performance of the proposed methods, including the number of fatalities and the rescue time. In this study, the proposed method was evaluated by numerical simulation and a comparison with the CNP algorithm. In order to examine the effect of uncertainty, the CNP method involved in two assumptions. At first, we ran the model by assuming accurate decision-making parameters and at second assuming with uncertainty.
5. Results and Discussion
Expert opinions show that the most probable earthquake intensity in the District 3 municipality of Tehran is, on average, 6.6 on the Richter scale. This severity represents the seismic intensity of the Niavaran Fault in the study area.
Figure 4 shows the vulnerability of buildings.
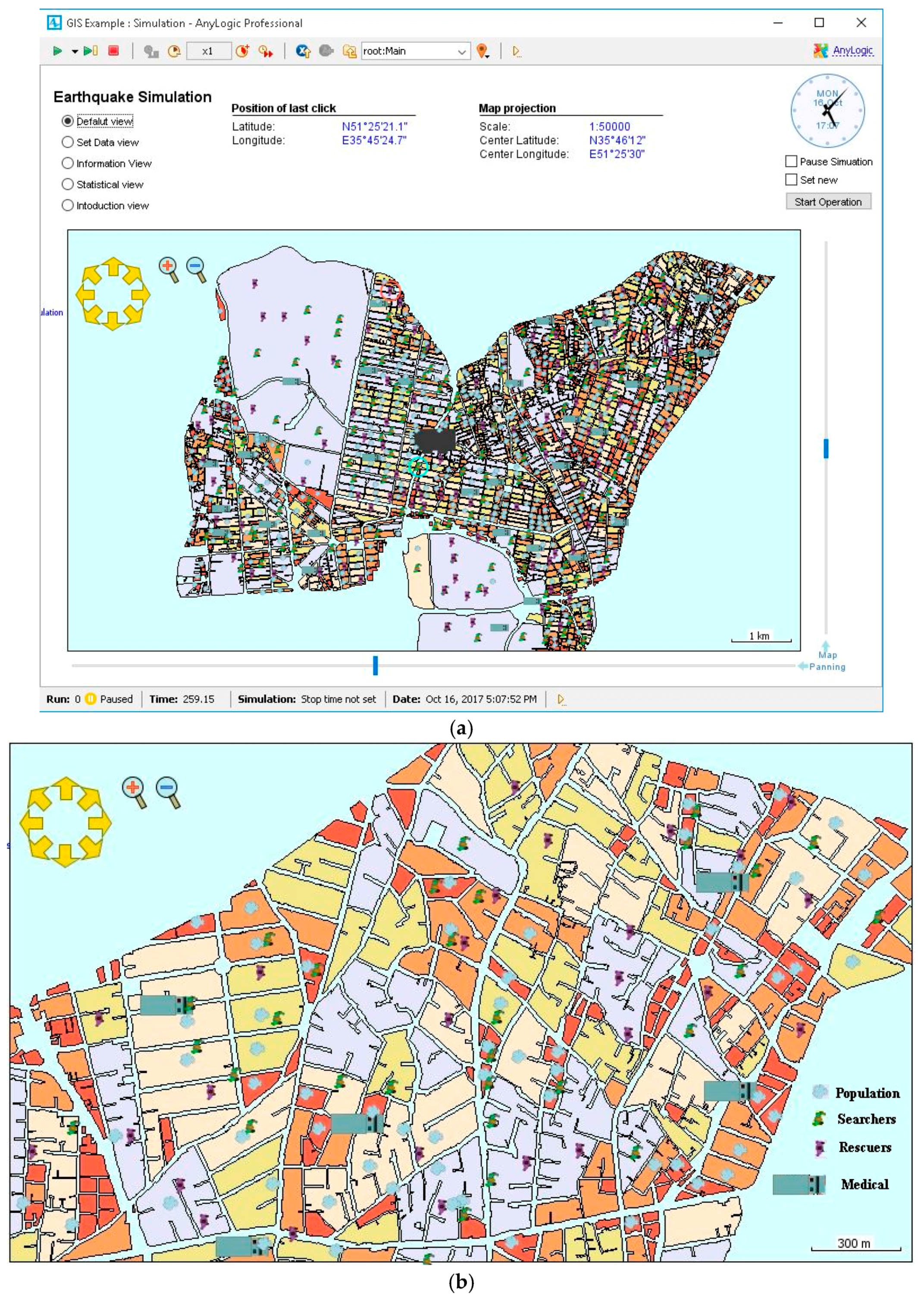
Building vulnerability is classified into four classes. The vulnerability grade has a direct influence on building damage. Buildings with no damage or with a damage grade of “Slight” are habitable (7027 buildings, 334 blocks), buildings with a damage grade of “Moderate” can be used to a limited extent (11,046 buildings; 525 blocks), buildings with a damage grade of “Extensive” are not safe (7111 buildings; 338 blocks), and buildings with damage grades of “Complete” have been destroyed (4881 building; 232 blocks). An earthquake (dependent on ground type) could leave 16% (buildings classified to a “Complete” grade) of buildings in District 3 of Tehran permanently and 24% of buildings temporarily out of use (buildings with a damage grade of “Extensive”). Furthermore, 40% of citizens could temporarily be left without a home and possibly needing rescue, medical care and rehousing. The number of injured and deceased people calculated for this scenario (6.6 Richter) are 17,238 and 22,435. The injured, central, search and rescue agents and the medical team are placed in the environment using the information stored in the Access database and the SQL functions. The injured agents are dispersed in the environment in accordance with the computational process of model presented by the International Institute of Seismology and Earthquake Engineering of Iran. The number of injuries was calculated for each block and included in the center of the relevant block. Search, rescue and ambulance agents were randomly distributed in the environment.
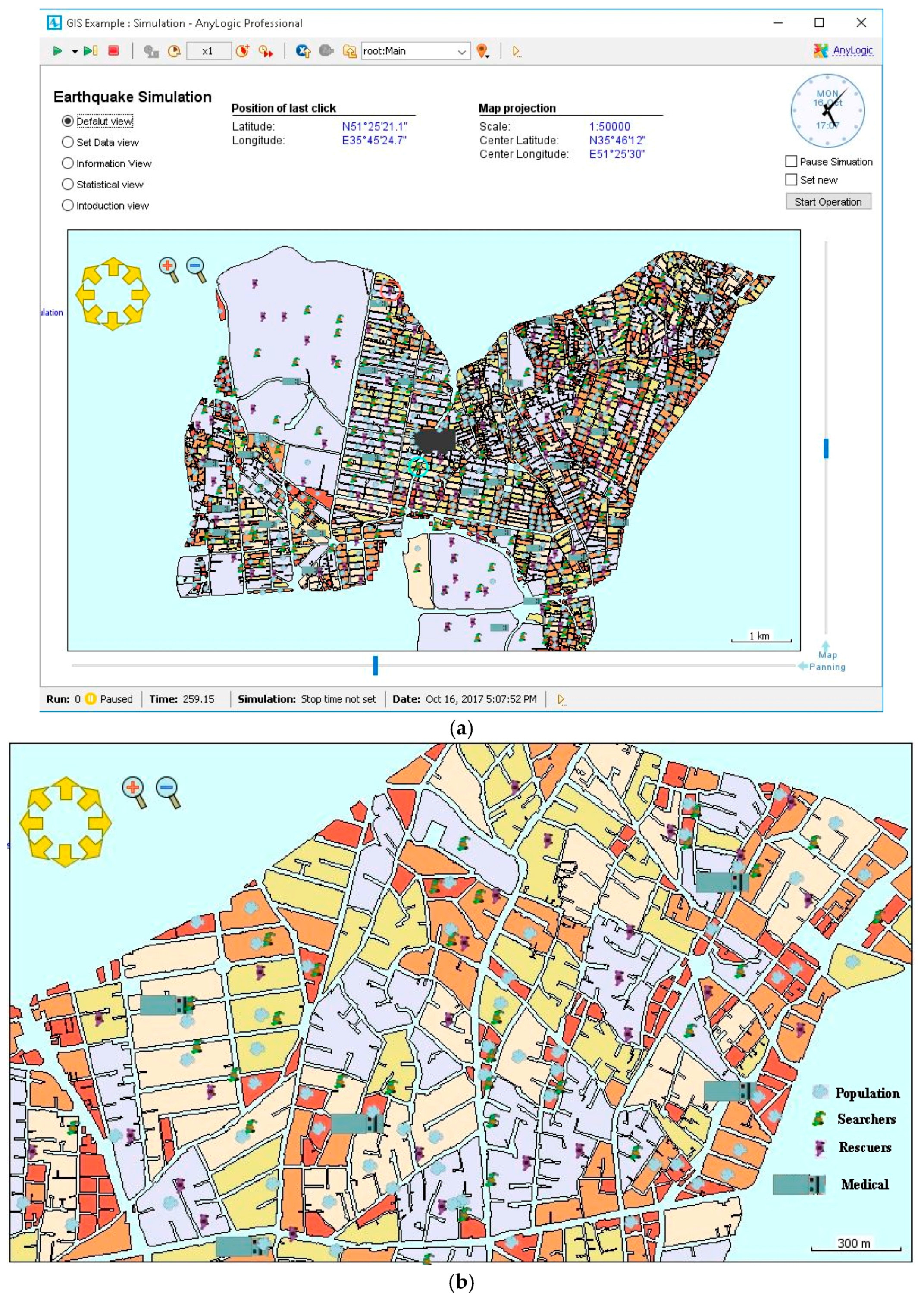
The successful implementation of MASs largely depends on the availability of appropriate technology, i.e., programming languages, software libraries and software production tools, in order to implement related concepts. AnyLogic software was used to implement this system, which allows the utilization of GIS data. In the current implementation, each agent plays the role of a team; that is, considering the regarded capabilities, each agent can be considered as an equivalent to a group in the real world. Further, in order to avoid the enhancement of the number of agents and the complexity of the environment and the aggravation of the calculations, a citizen agent is regarded as being equal to a population living in a block. In order to start the process of a search and rescue operation, the search agent first collaborates with the central agent in order to obtain the task of the environment. The central agent assigns tasks to the search agents after prioritizing the tasks and selecting the responsible agent for the tender.
Figure 3 displays the method of assigning these tasks, in which the central agent plays the role of Agent A, while the search agent has assumed the role of Agent B. At each stage, the search agents, which are responsible for the tender, based on their own rule-based logic and interval-based TOPSIS analysis, choose the most appropriate search agent for the specified tasks.
The search agents are initially in a ready state. They begin their search process when they win a tender and a task is assigned to them. The relevant agents move along the central line of the road and use the Dijkstra algorithm to find the shortest path. Dijkstra’s algorithm is a well-known algorithm for finding the shortest paths in road networks. It turns out that one can find the shortest paths from a given source to all points in a graph at the same time [
41]. In AnyLogic software, agents use the Dijkstra algorithm to traverse the path between two points. After reaching the desired location, in relation to the actual data, they start to save the casualties (operation phase). However, after referral to the region, the agents may find a significant difference between the information expressed in the tender and the actual information. In this case, as well as informing the central agent, they may refuse to do the work, which may not be possible given the operational capability of the group. Different conditions can be defined for such a situation. After finding the first injured person, they look for rescue agents for the injured person using the contract net. How this cooperation works is in the “Proposed Method” section. Based on
Figure 3, A and B are search and rescue agents, respectively. Therefore, they inform the groups in the operational area and wait for a response from the relevant groups. Then, they consider the results and find the most suitable rescuer group and award the rescuing task to the relevant group in the form of a message, before moving on to the next task. The final simulation environment is as shown in
Figure 5.
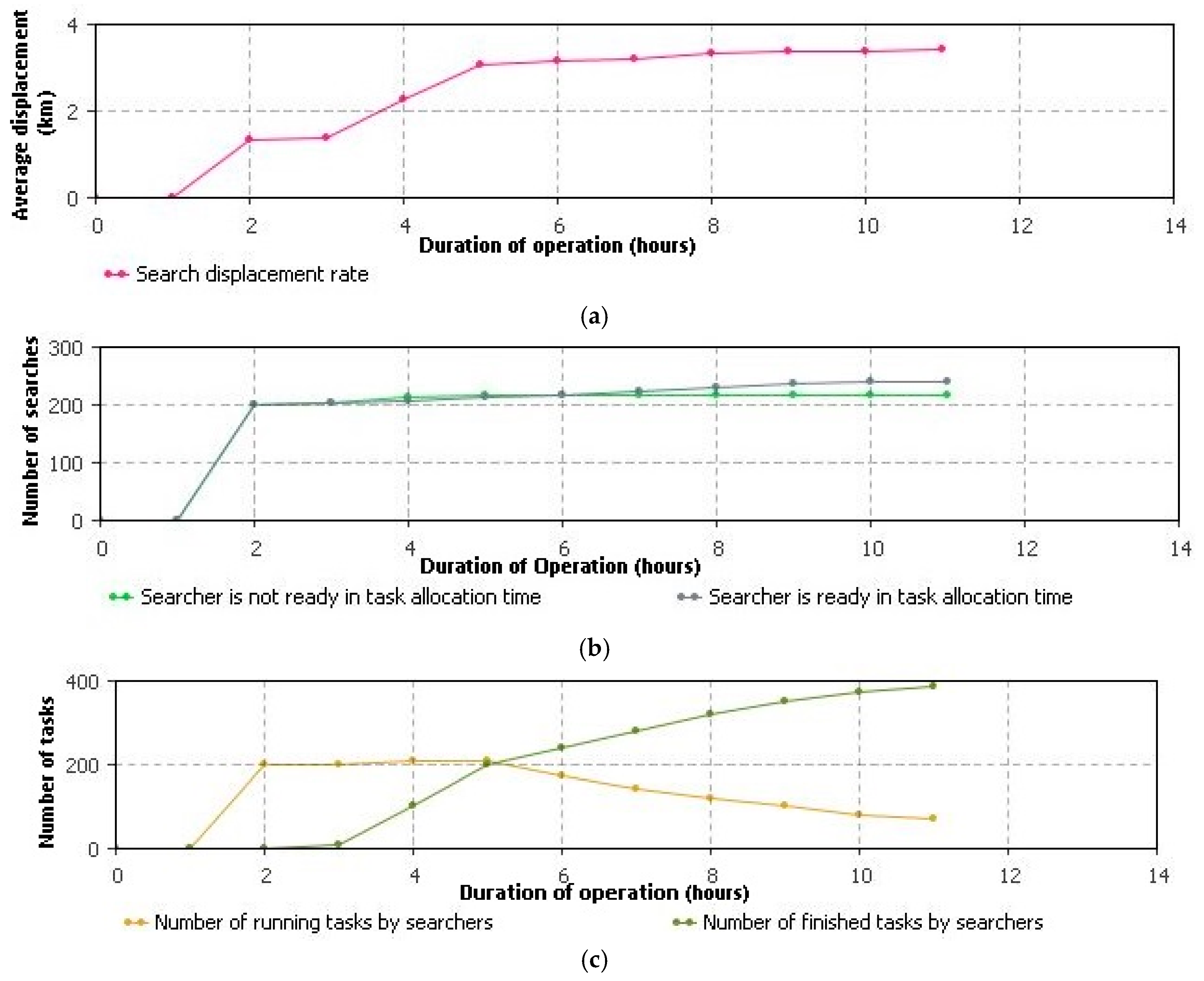
In the search and rescue simulator environment, adding a specific team to a specific location is possible if the latter exists on the map. Users can observe the position and tasks of the agents by clicking on each agent. Pages are included to enable continuous observation of the statistics for each agent. The rescue system should have the capabilities to display the best-possible information and status of the agents involved in the operation. At this stage, some facilities are added to the proposed system. Statistics are defined in order for each agent to follow the search and rescue operations.
Figure 6 demonstrates a sample of the statistics defined for the search agent. In addition, the statistics are defined for the overall process of operations.
Then, the rescuer groups change their status to a task-performing status and begin the rescue procedure, before selecting the most suitable medical team to handle the injured. After performing their job, they change their status to the ready state.
The ratio of success between the proposed method and the traditional CNP method is compared on different scales. The application of allocation methods, the size of the agent team, and the number of tasks are three main causes of complexity [
11]. The qualitative evaluation of the proposed algorithms is necessary in order to examine their capabilities in relation to different scales of agents [
42]. The scalability of algorithms is investigated through the implementation of each method per different amounts of each scenario, with the number of agents increasing in each scenario.
Table 5 indicates the results of the system when run for different numbers of each agent. The results were achieved by carrying out each scenario 500 times. The computational time of the proposed method was less than 2 s for a scenario with 300 rescue and search agents and 70 medical teams. In other words, the proposed method runs, at most, for 2 s. Due to the low computational time, this time was not included for different scenarios.
As indicated in
Table 5, with the increase in the number of search, rescue and medical teams, the duration of the rescue operation and the number of fatalities in both the proposed and the traditional CNP models are reduced. Therefore, the smallest number of fatalities and shortest duration of operations relate to the 27th scenario. In the proposed method, the duration of the search and rescue operations for different scales is at least 4.2, at most 30.9 and on average 11.6 h less than the duration in the case of the traditional CNP method. Thus, the average results for different scales indicate that reflecting uncertainty in task assignment improves the time of search and rescue operations by at least 13% and, on average, 20%. The number of fatalities in the proposed method decreased for different scales by at least 131, at most 638 and, on average, 302 individuals, respectively. Therefore, the proposed approach may perform better than the traditional CNP method, while the evaluation of the proposed method is superior for all evaluation parameters. The results demonstrate a significant degree of success in reducing the time spent on performing assigned tasks, as well as the number of fatalities, due to the uncertainty. The results indicate the importance of uncertainty and the need to address uncertainty in task assignments.
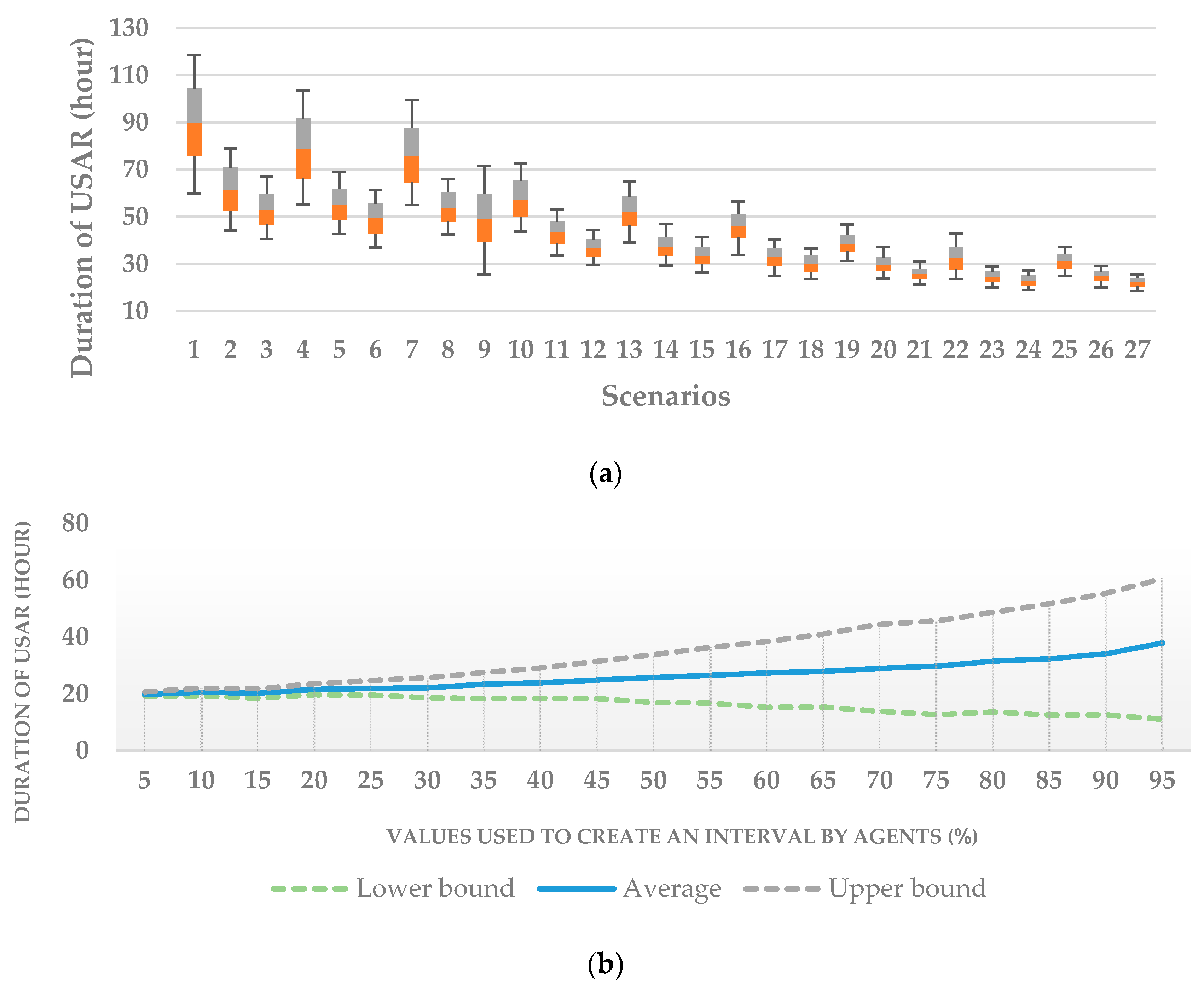
Uncertainty analysis was performed for each scenario. Uncertainty analysis plays an important role in model development and evaluation. It is necessary for defining the uncertainty bounds of model outputs [
43,
44]. There are various methods for analyzing uncertainty, which are mostly in the area of probable uncertainties. Monte Carlo method is one of them [
43] that rely on repeated random sampling to obtain numerical results. In interval uncertainty, it is usually impossible to obtain the distribution of uncertain parameters and also, considering time progresses of probabilistic uncertainty analysis, the overestimation of the bounds will increase. Limited studies have been done on the interval uncertainty analysis. In this study, a proposed method by Lan and Peng (2016) was used for the interval uncertainty analysis [
45].
In our model, the duration of rescue operations depends on task prioritization and outputs of each action in each stage. The final model used to calculate the duration of UARA operation can be defined as Equation (2):
The variables
x1 to
x8 are number of injuries, severity of the victims’ injuries, duration of the operation and infrastructure priorities, energy, route status, task runtime by agents and risk level for agents, respectively.
and
are functions of prioritization and bidding. In the simulated system, task prioritization takes place
n + 1 times (n is the number of tasks that cannot be performed in step 5 of the proposed method and re-added to the list) also,
T +
n bidding will be held (
T is total number of available tasks). Based on this information, Equation (2) can be represented as follows:
Equation (3) is dynamically executed in the simulated system, until the duration of USAR operation is estimated. Based on Lan and Peng (2016) proposed interval uncertainty analysis, the Chebyshev points used. In Chebyshev formula (Equation 4), m collocation points on interval [0, 1], can be constructed using the following points [
45]:
Using Equation (4), for each of the decision-making parameters in phase 1 and 5 of our proposed method, the numbers in the intervals are selected and the simulation continues. This technique presents a range of different outputs that may occur for each simulation. The results for 500 runs of each scenario are shown in
Figure 7.
As shown in
Figure 7a, for scenario 27, the interval of results for duration of USAR operation is the lowest. This means that the length of the interval has a direct relation to the operating time. The reason for this can be found in Equation (3). Based on this formula, fewer task allocation lead to less operational time. Because the fewer task allocation causes less uncertainty in the simulated dynamic system. In step 3 of the proposed method, the agents use the [X, X + 30%X] and [X – 30%X, X] to estimate the bounds. In
Figure 7b the results were obtained for different values instead of 30%. This analysis was applied to the 27th scenario. The graph shows that with the increase of uncertainty percentage of agents, the duration of USAR operation increases. This increase is due to the number of incorrect allocation.
In a limited number of studies, uncertainty in decision-making has been taken into account. Sang (2013) investigated rescue and search operations for disabled people during an earthquake, in which the fuzzy concept was used in order to interfere with linguistic uncertainties [
9]. Fuzzy methods are highly dependent on fuzzy membership functions. Most of the research in this area has examined the proposed methods in a laboratory environment [
11,
26,
27]. Experimenting the USAR operation on real scale to observe the uncertainties and their impact is very difficult and costly. Previous studies used square-shaped environment [
26,
27]. Injured persons, who should be rescued by rescue agents in the random initial position, were randomly distributed in an environment, which every side had a length of 2 km up to 20 km. investigating the proposed methods in simulated environments or real environments can be a more appropriate approach than testing in laboratory environments. According to previous studies, considering uncertainty in task allocation and cooperation between agents, as well as evaluating them in simulated UASR operations, was the main innovation of this research.
6. Conclusions
In the present study, a spatial simulation model for simulating post-earthquake USAR operations and modeling processes, as well as interactions related to natural hazards, was developed. The system provides a user-controlled toolkit to examine the interactions between search and rescue groups. The results of the current research enable appropriate decisions to be made in order to deal with the crisis during an earthquake or the simulation of earthquake conditions. Based on the results, in order to solve the problem of MASs coordination, using the CNP along with uncertainty, in order to coordinate and assign tasks among agents, can improve the behavior of the system. In addition, significant results were obtained in the field of establishing coordination among the agents of MASs.
Numerical results show that the proposed method is better than the CNP in terms of the duration of USAR operations (11.6 h on average) and the number of fatalities (302 individuals on average). Comparing the results of the proposed method and the CNP showed that taking uncertainty in task allocation into account improved the duration of the rescue operations by 20%. Also, decreased the number of fatalities by 15%. Therefore, the proposed approach showed a better performance than the traditional CNP method.
Although post-earthquake operations are difficult to manage and predict, the results of the present study indicated that the method of managing and coordinating is largely predictable, while some improvements can be made by identifying the important influential agents and using a model with a high adaptability to the conditions. Further, the results of the study illustrated that the agent-based modeling, as a low to high mode, can effectively simulate some of the behaviors of various human groups and, by obtaining results, display a general trend of social phenomena, such as cooperation during search and rescue operations. Although chaotic situation modeling can vary according to different factors, such as urban amenities, social culture and seasons, the proposed model can also be considered for chaotic situations involving higher levels of uncertainty (for example, 50% instead of 30%). It should be noted that, at higher rates, the proposed model simplifies the real environment and cannot fully model the chaotic situation.
In addition, the GIS proved its capabilities as an appropriate context for preparing the environment of agents, modeling their behavior and analyzing the results obtained from their activities. The model developed in the present study is flexible, due to having multiple and effective parameters for adapting to the environment, and can be used in other areas by considering its favorable results. Using the simulation of USAR operations can be a good alternative to traditional decision-making methods because these systems can model decision-making members, along with their interaction, as well as model the participation of different groups in decision-making. The characteristics of these systems can be attributed to their high ability to combine and consider incompatible time-spatial and behavioral complexities.
Some cases arising from the results and limitations of this study can be investigated in future research. These include: research to propose a method for interval uncertainty analyses by focusing on reducing the number of executions in dynamic simulations, evaluation of proposed method by calculating road blockages, using logic tree and fuzzy logic in order to address weighting techniques, applying the proposed method in an area where ground data exist (for example, a transportation system, simulation of a gate assignment problem), and focusing on the modeling of a chaotic situation.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}