Advanced Sidereal Filtering for Mitigating Multipath Effects in GNSS Short Baseline Positioning


Abstract
1. Introduction
2. Data and Methods
2.1. Data Collection
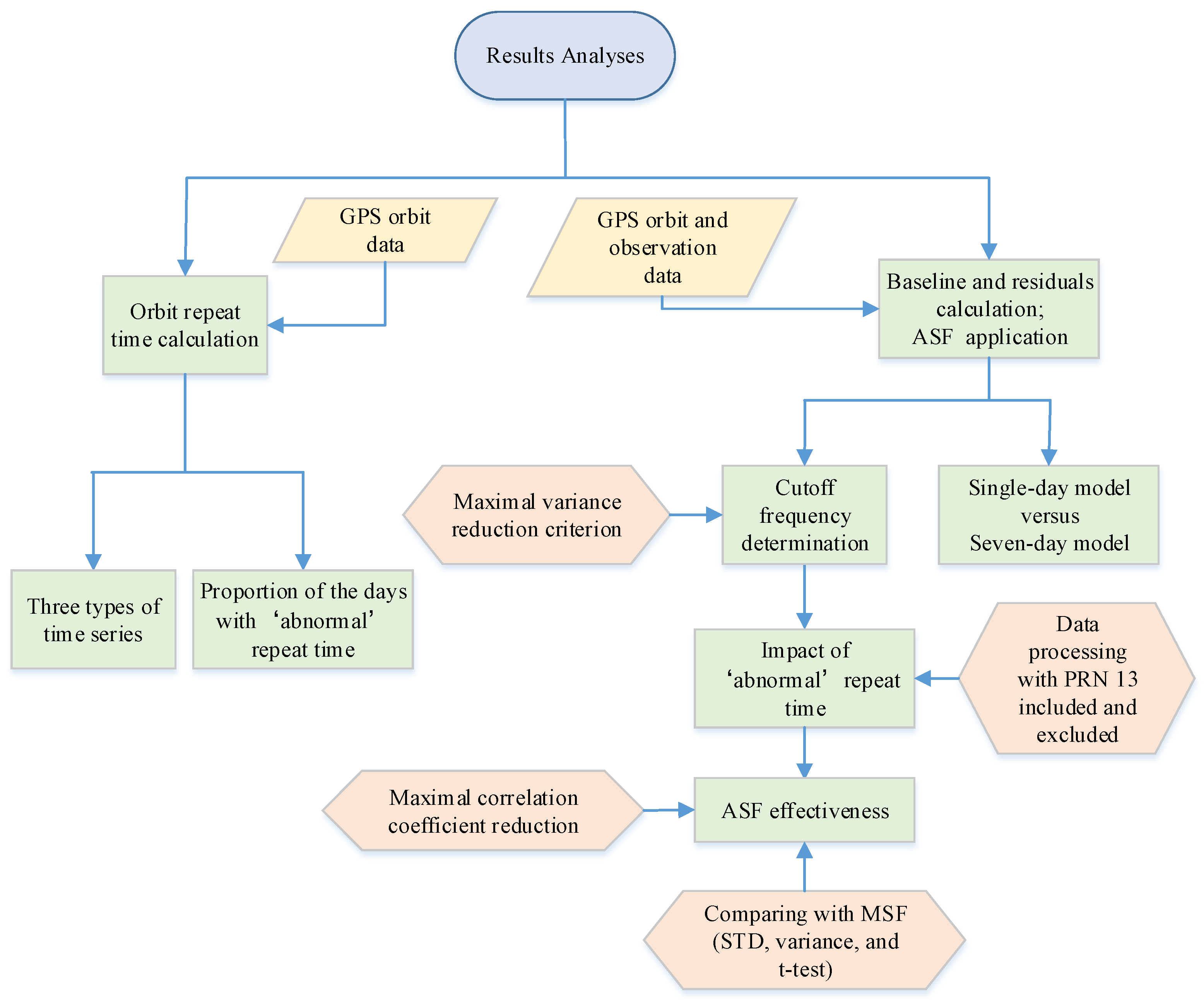
2.2. Methods
- Calculating the repeat time of each satellite;
- Estimating the parameters (CB and three baseline components) with ambiguity resolution for the previous day;
- Recalculating the residuals with the parameters being fixed to their daily average values and low-pass filtering the recalculated residual time series;
- Shifting the recalculated residual time series for each satellite with its own repeat time to construct the multipath correction model;
- Correcting the multipath errors in single-differenced observables with the model and estimating the baseline components and CB for the applied day.
3. Results
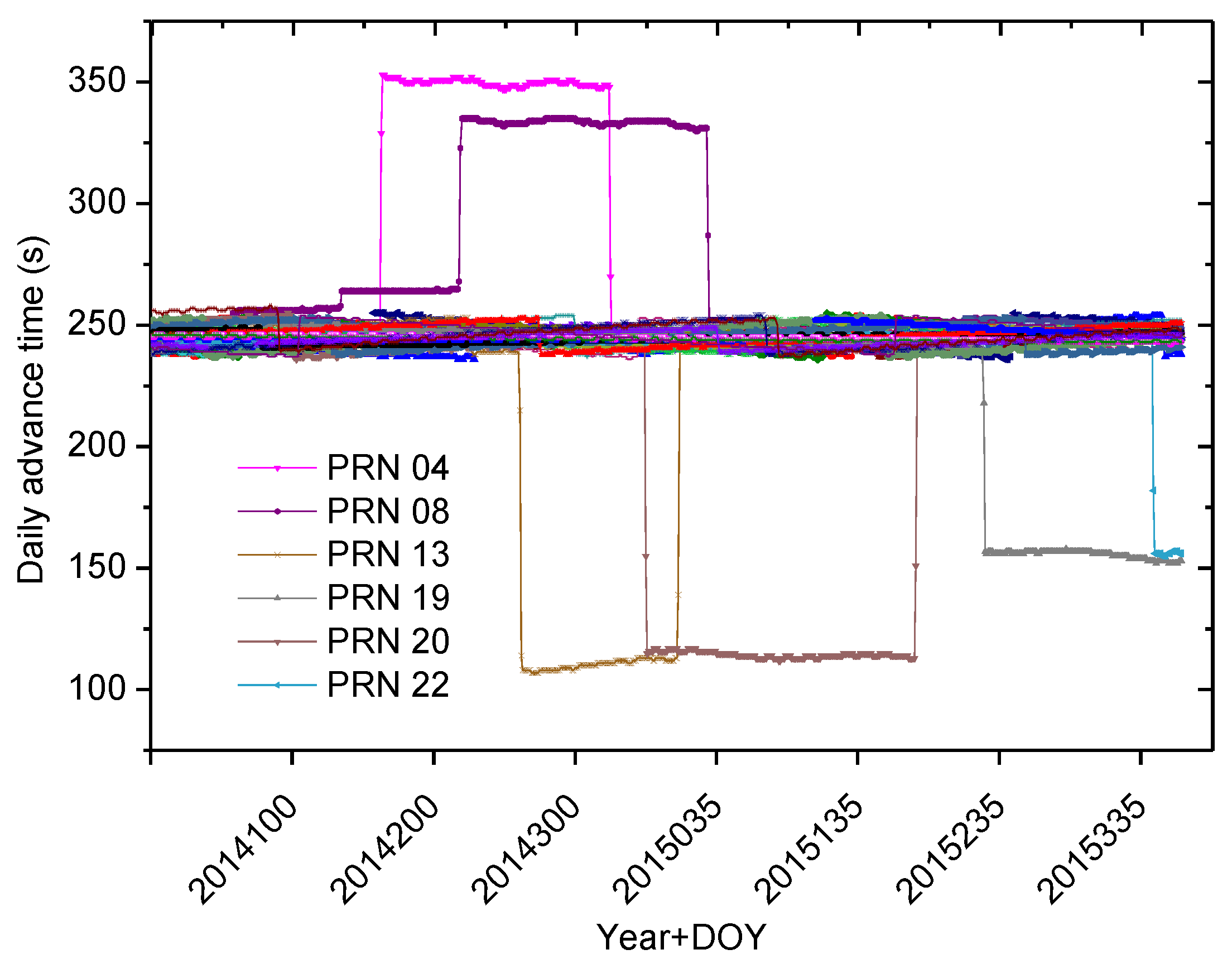
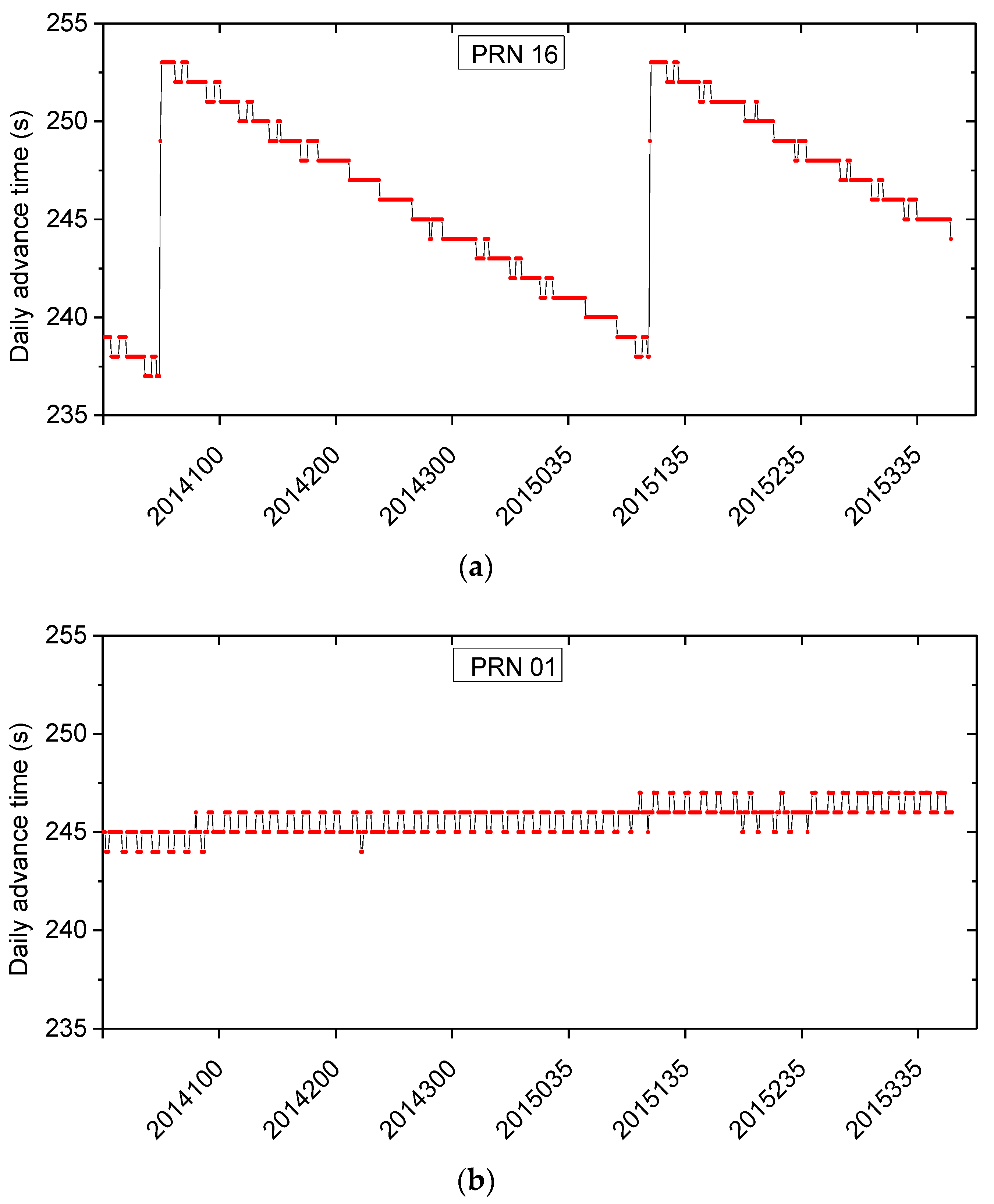
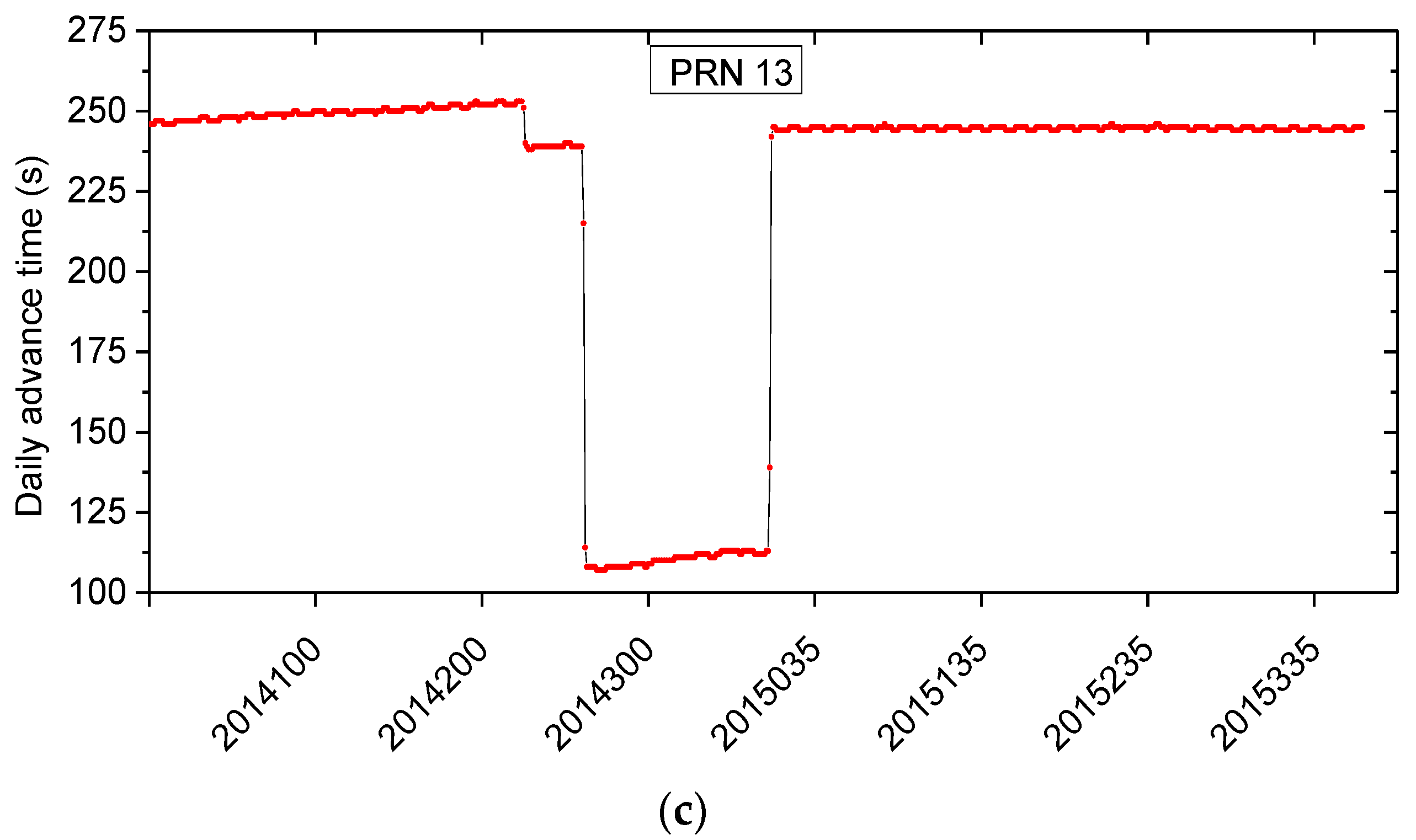
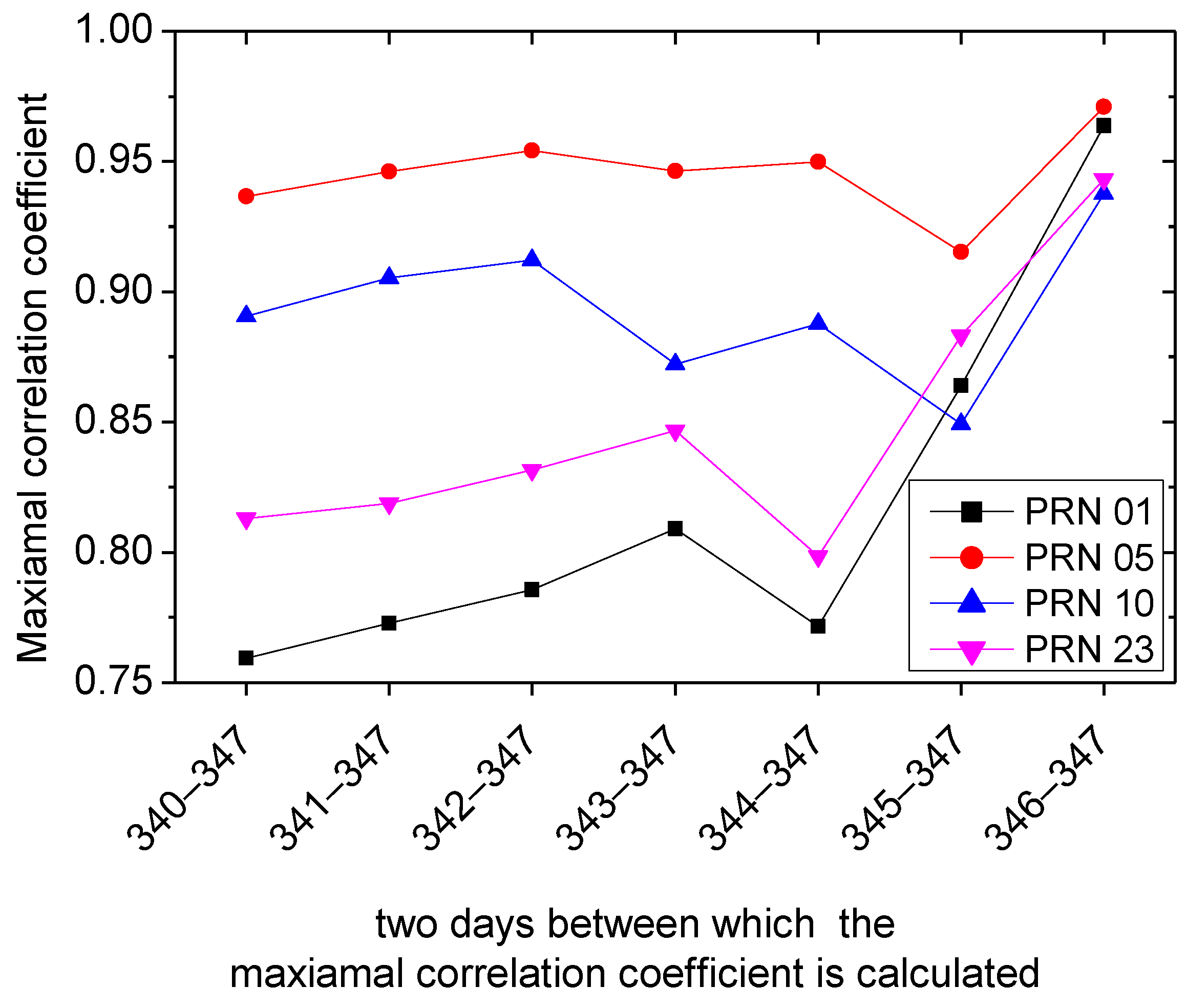
3.1. Orbit Repeat Time
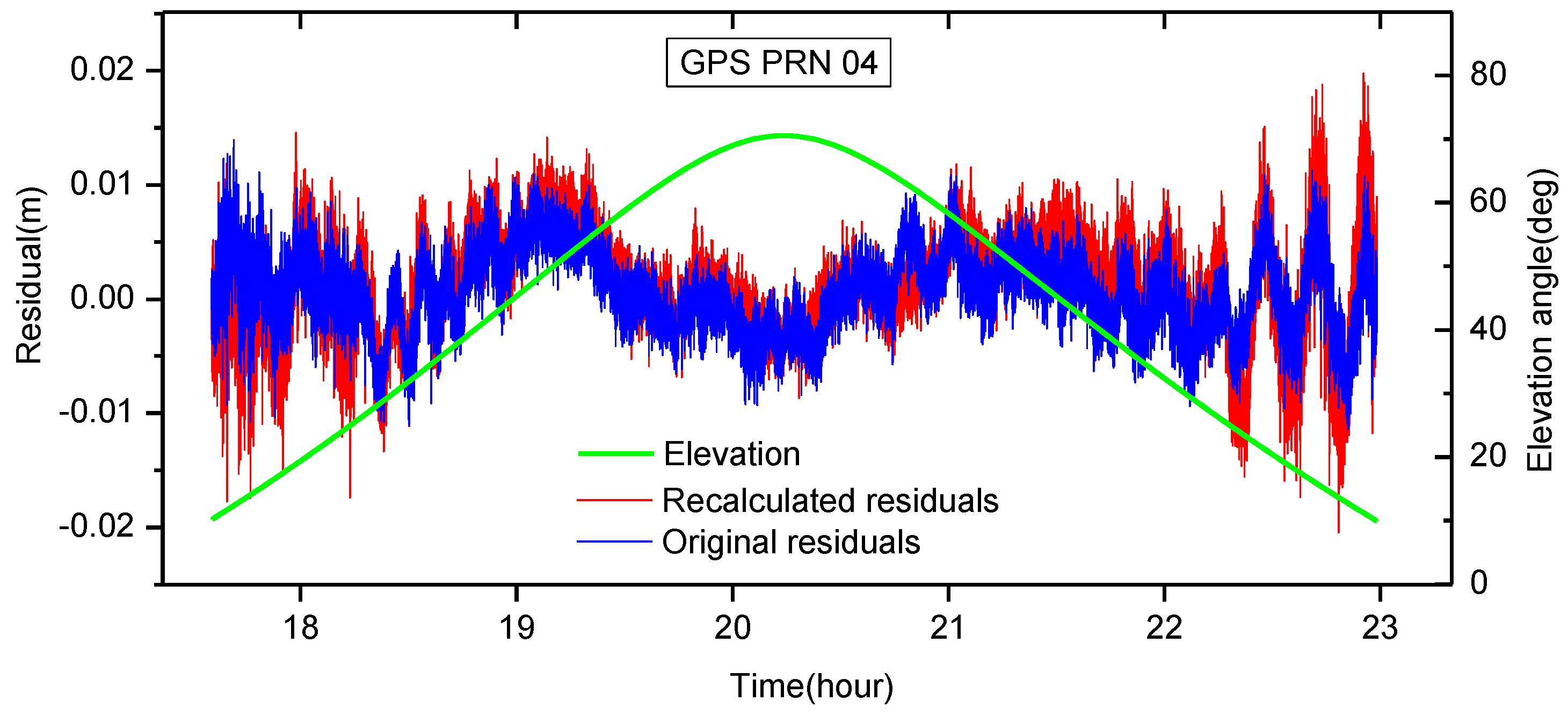
3.2. ASF Multipath Mitigation
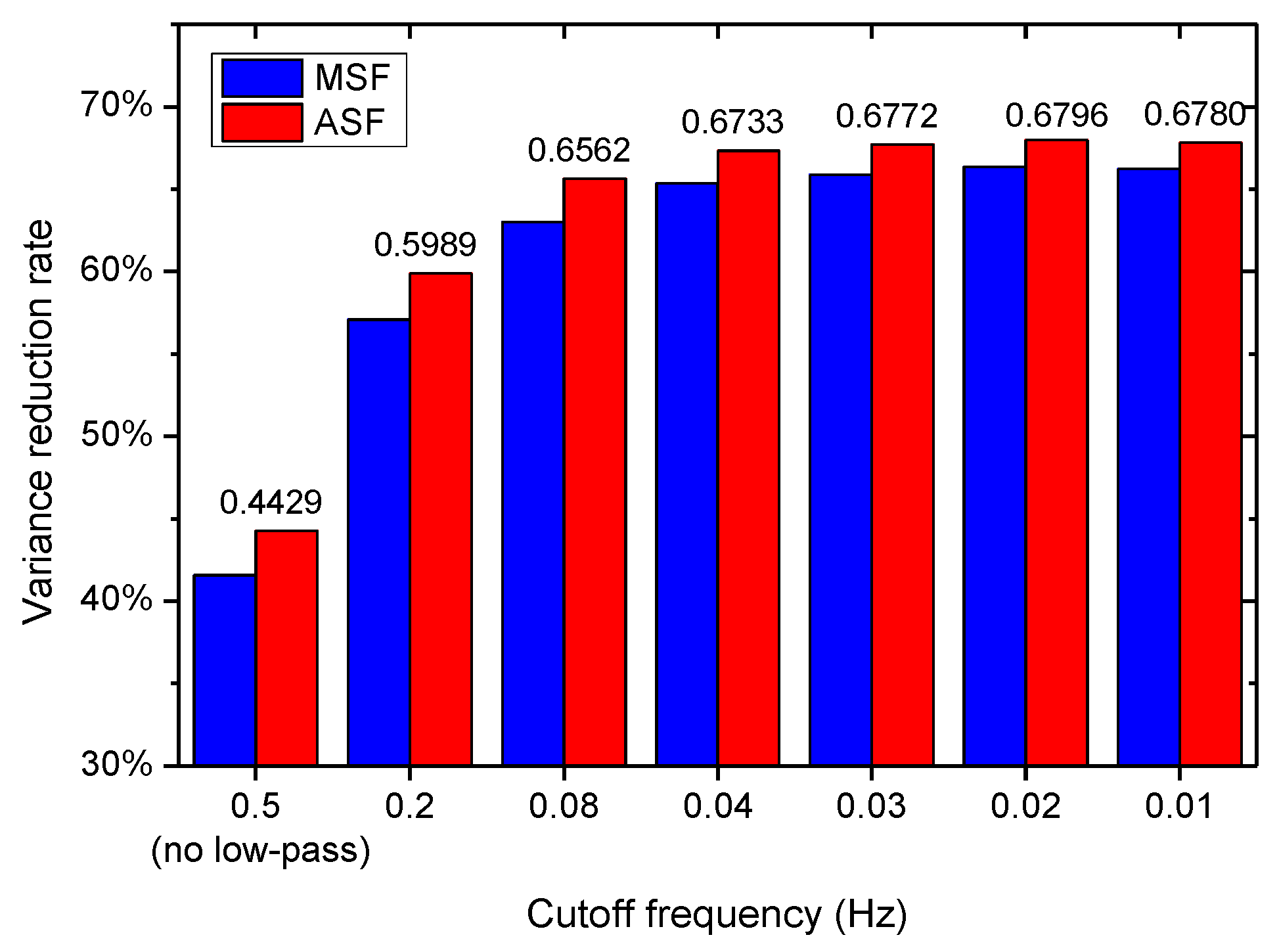
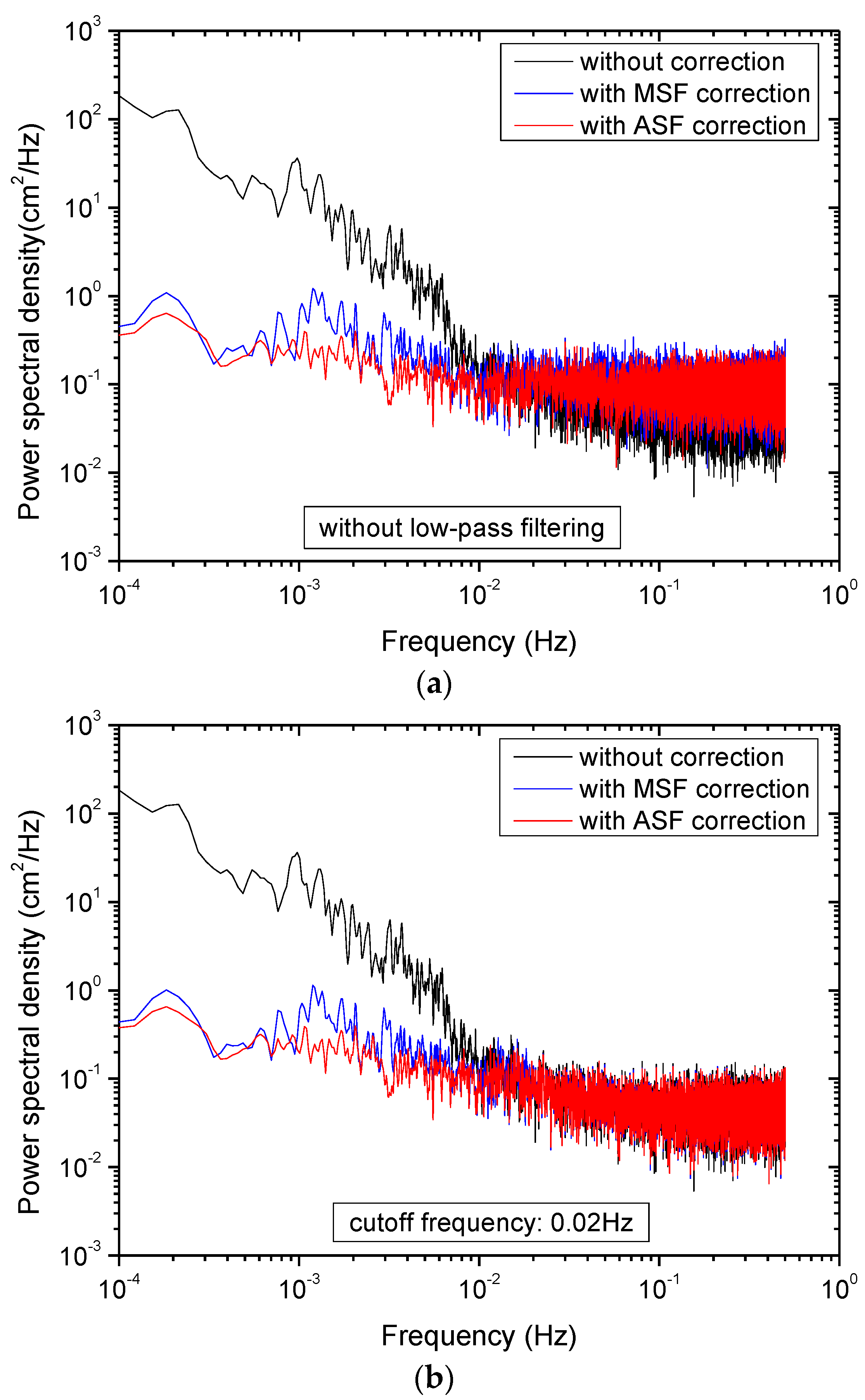
3.2.1. Cutoff Frequency
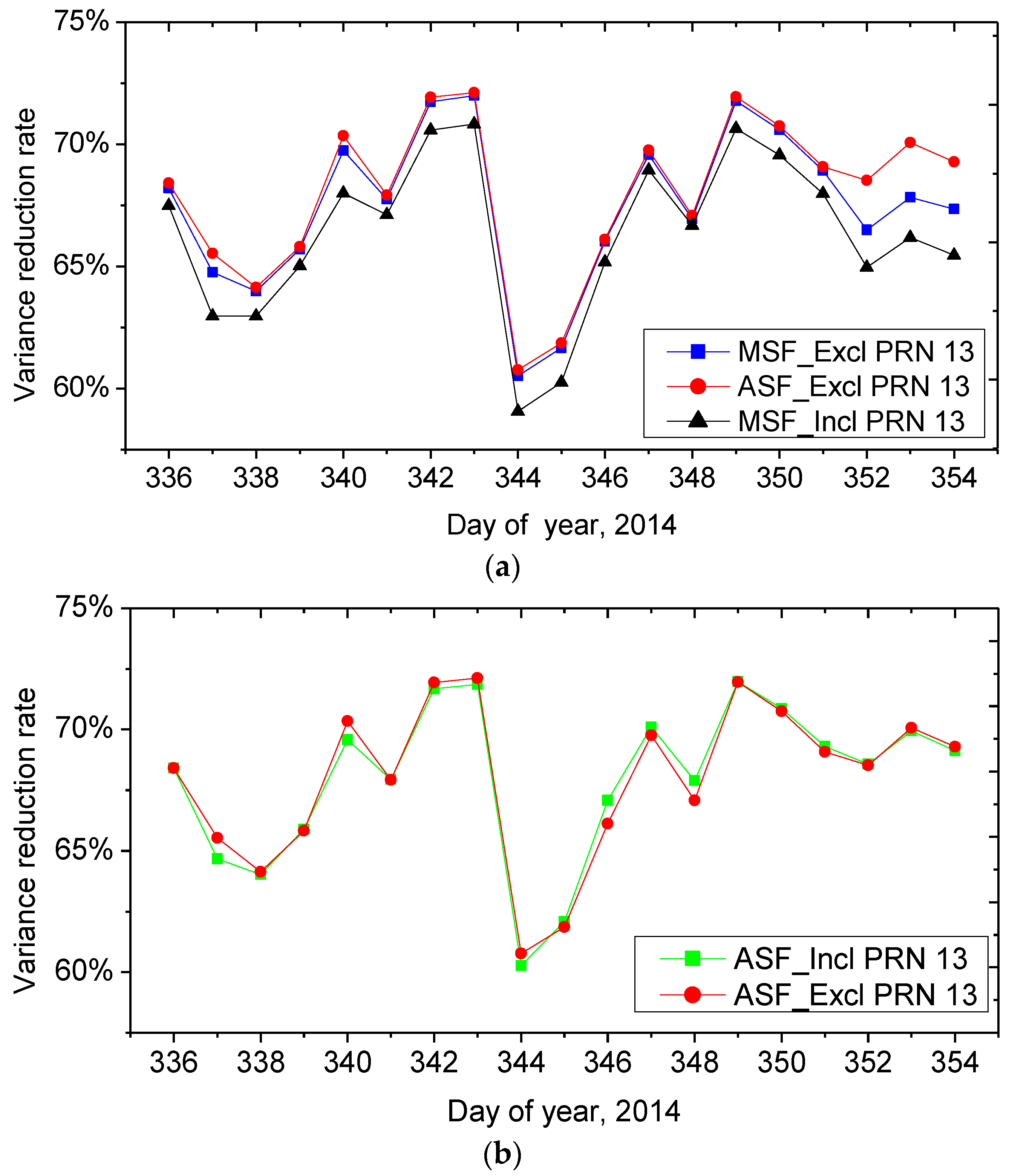
3.2.2. Impact of the Satellite with ‘Abnormal’ Repeat Time
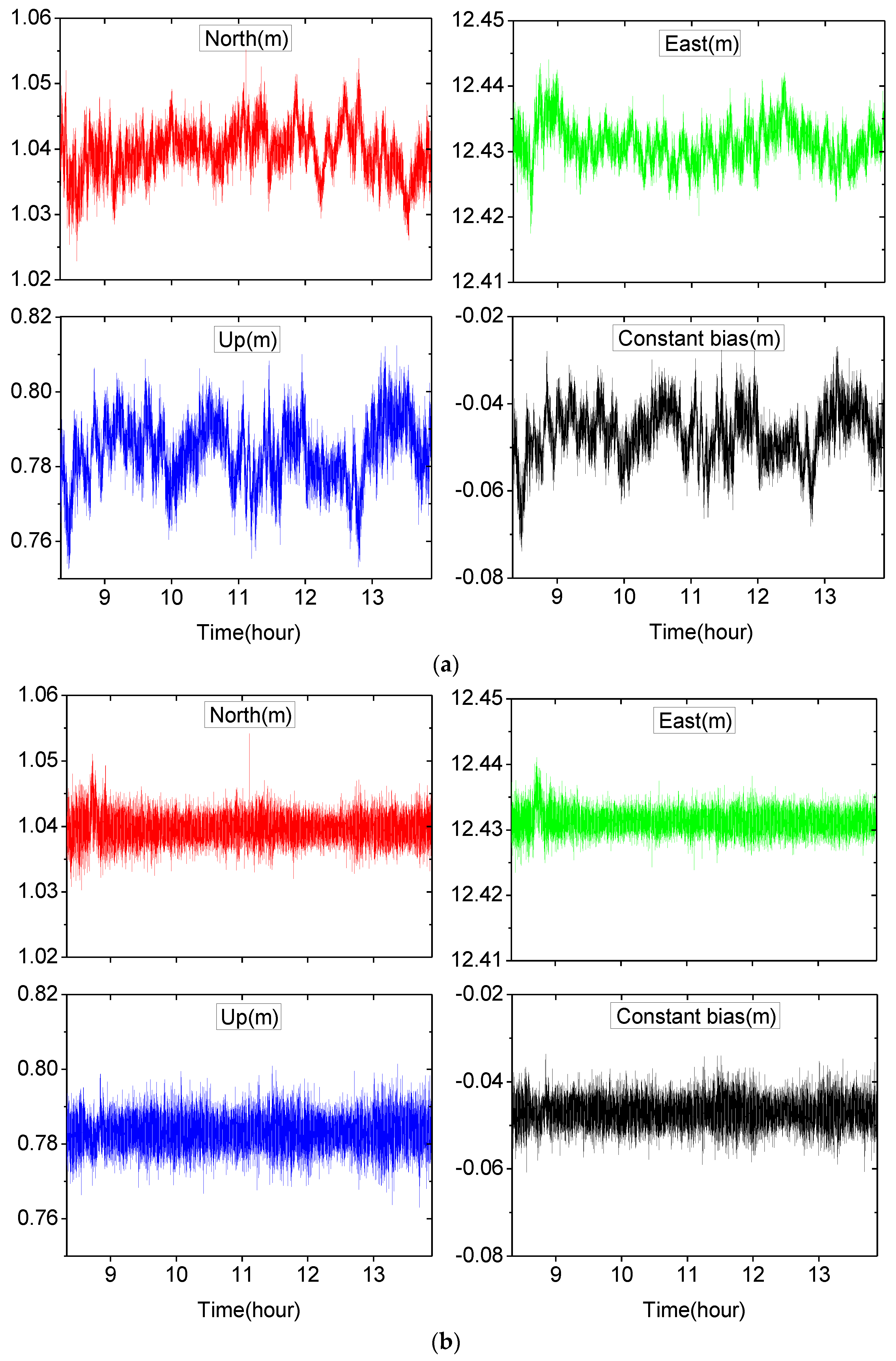
3.2.3. Multipath Reduction
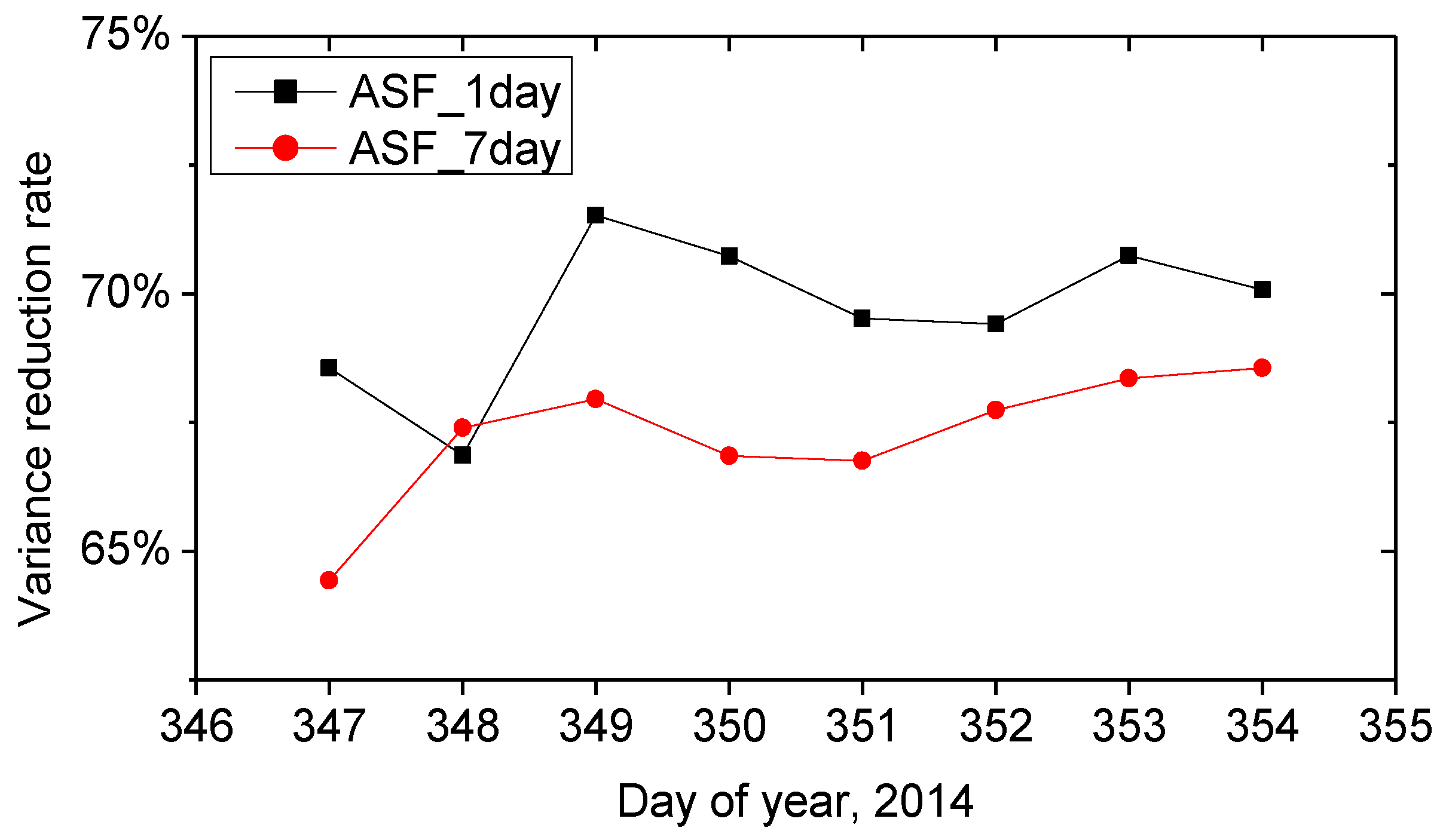
3.3. Single-Day Model Versus Seven-Day Model
4. Discussions
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PRN | DOY 336 | DOY 337 | DOY 338 | DOY 339 | DOY 340 | |||||
| WSF | ASF | WSF | ASF | WSF | ASF | WSF | ASF | WSF | ASF | |
| 1 | 0.9 | 0.014 | 0.925 | 0.065 | 0.943 | 0.04 | 0.962 | 0.063 | 0.961 | 0 |
| 2 | 0.947 | 0.012 | 0.969 | 0.016 | 0.971 | 0.064 | 0.862 | 0.012 | 0.877 | 0.059 |
| 3 | / | / | / | / | / | / | / | / | / | / |
| 4 | 0.984 | 0 | 0.953 | 0.055 | 0.96 | 0.135 | 0.985 | 0.059 | 0.979 | 0.034 |
| 5 | 0.909 | 0.002 | 0.914 | 0.009 | 0.965 | 0.178 | 0.923 | 0.039 | 0.937 | 0 |
| 6 | 0.941 | 0.042 | 0.948 | 0 | 0.964 | 0.051 | 0.957 | 0.069 | 0.963 | 0.043 |
| 7 | 0.976 | 0.023 | 0.944 | 0 | 0.933 | 0.113 | 0.964 | 0.049 | 0.958 | 0.007 |
| 8 | / | / | / | / | / | / | / | / | / | / |
| 9 | 0.969 | 0.01 | 0.962 | 0.038 | 0.956 | 0.029 | 0.975 | 0.071 | 0.984 | 0.043 |
| 10 | 0.912 | 0.011 | 0.914 | 0 | 0.935 | 0.033 | 0.949 | 0.046 | 0.962 | 0.024 |
| 11 | 0.968 | 0 | 0.947 | 0 | 0.957 | 0.12 | 0.984 | 0.017 | 0.96 | 0 |
| 12 | 0.973 | 0 | 0.962 | 0 | 0.966 | 0.09 | 0.971 | 0.039 | 0.98 | 0 |
| 13 | / | / | / | / | / | / | / | / | / | / |
| 14 | 0.98 | 0 | 0.948 | 0 | 0.95 | 0.058 | 0.981 | 0 | 0.983 | 0 |
| 15 | 0.912 | 0 | 0.921 | 0.033 | 0.976 | 0 | 0.876 | 0.005 | 0.889 | 0 |
| 16 | 0.973 | 0.029 | 0.908 | 0.004 | 0.916 | 0.086 | 0.982 | 0.041 | 0.979 | 0.01 |
| 17 | 0.959 | 0 | 0.939 | 0.041 | 0.957 | 0 | 0.979 | 0 | 0.978 | 0.019 |
| 18 | 0.927 | 0.02 | 0.905 | 0 | 0.934 | 0.09 | 0.975 | 0 | 0.98 | 0.019 |
| 19 | 0.964 | 0.041 | 0.92 | 0.071 | 0.927 | 0.05 | 0.974 | 0 | 0.955 | 0.019 |
| 20 | 0.954 | 0.045 | 0.93 | 0.131 | 0.931 | 0 | 0.977 | 0.028 | 0.966 | 0.038 |
| 21 | 0.848 | 0.056 | 0.84 | 0.001 | 0.951 | 0.036 | 0.953 | 0.04 | 0.952 | 0.022 |
| 22 | 0.968 | 0 | 0.774 | 0 | 0.754 | 0.1 | 0.983 | 0.011 | 0.985 | 0.027 |
| 23 | 0.949 | 0.027 | 0.933 | 0.059 | 0.915 | 0 | 0.962 | 0.032 | 0.977 | 0.047 |
| 24 | 0.937 | 0.001 | 0.94 | 0.042 | 0.968 | 0.018 | 0.657 | 0.003 | 0.623 | 0.055 |
| 25 | 0.975 | 0.06 | 0.932 | 0.137 | 0.939 | 0 | 0.972 | 0.007 | 0.975 | 0.042 |
| 26 | / | / | / | / | / | / | 0.907 | 0.003 | / | / |
| 27 | 0.976 | 0.009 | 0.915 | 0 | 0.913 | 0.133 | 0.984 | 0.043 | 0.978 | 0.037 |
| 28 | 0.925 | 0.008 | 0.889 | 0.009 | 0.922 | 0.003 | 0.97 | 0.065 | 0.955 | 0.061 |
| 29 | 0.934 | 0 | 0.83 | 0.073 | 0.866 | 0 | 0.909 | 0.039 | 0.905 | 0.005 |
| 30 | 0.975 | 0.002 | 0.959 | 0 | 0.96 | 0.032 | 0.89 | 0.031 | 0.89 | 0.04 |
| 31 | 0.984 | 0.019 | 0.939 | 0.083 | 0.949 | 0 | 0.982 | 0.009 | 0.986 | 0.032 |
| PRN | DOY 341 | DOY 342 | DOY 343 | DOY 344 | DOY 345 | |||||
| WSF | ASF | WSF | ASF | WSF | ASF | WSF | ASF | WSF | ASF | |
| 1 | 0.945 | 0.069 | 0.96 | 0.008 | 0.98 | 0.022 | 0.918 | 0.065 | 0.914 | 0.088 |
| 2 | 0.976 | 0 | 0.977 | 0.032 | 0.961 | 0.009 | 0.983 | 0.008 | 0.937 | 0.059 |
| 3 | / | / | / | / | / | / | / | / | / | / |
| 4 | 0.981 | 0 | 0.986 | 0.01 | 0.984 | 0.031 | 0.914 | 0 | 0.925 | 0.18 |
| 5 | 0.965 | 0.111 | 0.972 | 0.013 | 0.958 | 0.009 | 0.975 | 0.018 | 0.943 | 0.008 |
| 6 | 0.944 | 0.027 | 0.954 | 0.022 | 0.958 | 0.005 | 0.959 | 0.063 | 0.942 | 0.052 |
| 7 | 0.961 | 0.058 | 0.962 | 0.008 | 0.968 | 0.024 | 0.854 | 0 | 0.863 | 0.066 |
| 8 | / | / | / | / | / | / | / | / | / | / |
| 9 | 0.982 | 0.094 | 0.978 | 0.013 | 0.974 | 0.032 | 0.919 | 0 | 0.891 | 0.021 |
| 10 | 0.94 | 0.056 | 0.952 | 0.012 | 0.941 | 0.022 | 0.942 | 0.016 | 0.924 | 0.034 |
| 11 | 0.97 | 0.04 | 0.981 | 0.007 | 0.984 | 0.018 | 0.85 | 0 | 0.849 | 0.118 |
| 12 | 0.979 | 0.009 | 0.979 | 0.018 | 0.979 | 0.032 | 0.976 | 0 | 0.956 | 0.099 |
| 13 | / | / | / | / | / | / | / | / | / | / |
| 14 | 0.984 | 0.02 | 0.982 | 0.013 | 0.983 | 0.016 | 0.923 | 0.013 | 0.925 | 0.071 |
| 15 | 0.981 | 0 | 0.975 | 0.019 | 0.97 | 0.041 | 0.98 | 0.003 | / | / |
| 16 | 0.974 | 0.016 | 0.983 | 0.007 | 0.977 | 0.051 | 0.868 | 0 | 0.889 | 0.094 |
| 17 | 0.959 | 0 | 0.959 | 0.031 | 0.978 | 0.013 | 0.957 | 0.046 | 0.97 | 0 |
| 18 | 0.984 | 0.015 | 0.978 | 0.017 | 0.979 | 0.021 | 0.968 | 0 | 0.936 | 0.057 |
| 19 | 0.954 | 0.02 | 0.975 | 0 | 0.977 | 0.029 | 0.871 | 0.086 | 0.882 | 0.018 |
| 20 | 0.956 | 0.008 | 0.966 | 0.035 | 0.985 | 0.048 | 0.911 | 0.076 | 0.913 | 0 |
| 21 | 0.982 | 0.015 | 0.982 | 0.008 | 0.967 | 0.011 | 0.867 | 0.088 | 0.883 | 0 |
| 22 | 0.986 | 0.014 | 0.985 | 0.012 | 0.982 | 0.011 | 0.792 | 0 | 0.781 | 0.088 |
| 23 | 0.97 | 0.03 | 0.963 | 0.018 | 0.98 | 0.054 | 0.87 | 0.014 | 0.849 | 0 |
| 24 | 0.987 | 0.02 | 0.983 | 0.02 | 0.978 | 0.02 | 0.975 | 0.007 | 0.967 | 0 |
| 25 | 0.973 | 0.005 | 0.97 | 0.009 | 0.974 | 0.032 | 0.95 | 0.145 | 0.949 | 0 |
| 26 | / | / | 0.964 | 0.004 | 0.963 | 0.031 | 0.979 | 0.034 | 0.941 | 0.064 |
| 27 | 0.981 | 0.01 | 0.985 | 0.007 | 0.985 | 0.027 | 0.812 | 0 | 0.821 | 0.153 |
| 28 | 0.915 | 0.013 | 0.923 | 0.013 | 0.976 | 0.039 | 0.906 | 0.021 | 0.921 | 0.092 |
| 29 | 0.979 | 0.026 | 0.973 | 0.024 | 0.962 | 0.002 | 0.875 | 0.149 | 0.854 | 0 |
| 30 | 0.959 | 0.037 | 0.971 | 0.015 | 0.955 | 0.036 | 0.937 | 0 | 0.93 | 0.099 |
| 31 | 0.985 | 0.02 | 0.987 | 0.021 | 0.982 | 0.013 | 0.868 | 0.137 | 0.884 | 0 |
| 32 | 0.941 | 0.03 | 0.976 | 0.014 | 0.971 | 0.009 | 0.729 | 0 | 0.775 | 0 |
| PRN | DOY 346 | DOY 347 | DOY 348 | DOY 349 | DOY 350 | |||||
| WSF | ASF | WSF | ASF | WSF | ASF | WSF | ASF | WSF | ASF | |
| 1 | 0.964 | 0.032 | 0.981 | 0.06 | 0.974 | 0.023 | 0.974 | 0.032 | 0.976 | 0.062 |
| 2 | 0.953 | 0.053 | 0.973 | 0.055 | 0.969 | 0 | 0.896 | 0.046 | 0.912 | 0.013 |
| 3 | / | / | 0.79 | 0.175 | 0.962 | 0.008 | 0.953 | 0.015 | 0.885 | 0.024 |
| 4 | 0.982 | 0.034 | 0.985 | 0.038 | 0.982 | 0 | 0.976 | 0.034 | 0.972 | 0.044 |
| 5 | 0.951 | 0.044 | 0.972 | 0 | 0.964 | 0.092 | 0.895 | 0.032 | 0.895 | 0.024 |
| 6 | 0.935 | 0.022 | 0.973 | 0.049 | 0.961 | 0.036 | 0.893 | 0.018 | 0.808 | 0.075 |
| 7 | 0.958 | 0.068 | 0.951 | 0.088 | 0.971 | 0.047 | 0.899 | 0.042 | 0.907 | 0.06 |
| 8 | / | / | / | / | / | / | / | / | / | / |
| 9 | 0.96 | 0.017 | 0.974 | 0.035 | 0.978 | 0.07 | 0.947 | 0.035 | 0.872 | 0.002 |
| 10 | 0.934 | 0.036 | 0.95 | 0.024 | 0.95 | 0.063 | 0.824 | 0.002 | 0.827 | 0.024 |
| 11 | 0.978 | 0.059 | 0.983 | 0 | 0.976 | 0 | 0.97 | 0.033 | 0.971 | 0.054 |
| 12 | 0.963 | 0.061 | 0.978 | 0.012 | 0.972 | 0.056 | 0.946 | 0.004 | 0.87 | 0.023 |
| 13 | / | / | / | / | / | / | / | / | / | / |
| 14 | 0.97 | 0.027 | 0.976 | 0.022 | 0.982 | 0.03 | 0.967 | 0.005 | 0.98 | 0 |
| 15 | / | / | 0.971 | 0.016 | 0.976 | 0 | 0.948 | 0.049 | 0.88 | 0.04 |
| 16 | 0.978 | 0.016 | 0.981 | 0.043 | 0.98 | 0 | 0.979 | 0.033 | 0.975 | 0.029 |
| 17 | 0.977 | 0.058 | 0.98 | 0.076 | 0.961 | 0 | 0.938 | 0 | 0.761 | 0.026 |
| 18 | 0.97 | 0 | 0.967 | 0.02 | 0.974 | 0 | 0.926 | 0.004 | 0.951 | 0.029 |
| 19 | 0.965 | 0.006 | 0.972 | 0 | 0.963 | 0.04 | 0.955 | 0.007 | 0.962 | 0.007 |
| 20 | 0.974 | 0 | 0.981 | 0 | 0.967 | 0.028 | 0.965 | 0.006 | / | / |
| 21 | 0.962 | 0.045 | 0.978 | 0.004 | 0.983 | 0.015 | 0.93 | 0.009 | 0.953 | 0.006 |
| 22 | 0.971 | 0.031 | 0.977 | 0.016 | 0.981 | 0 | 0.967 | 0.011 | 0.97 | 0.071 |
| 23 | 0.945 | 0.023 | 0.966 | 0.031 | 0.96 | 0.022 | 0.944 | 0 | 0.839 | 0.032 |
| 24 | 0.974 | 0.077 | 0.976 | 0.019 | 0.977 | 0.049 | 0.936 | 0.005 | 0.936 | 0.026 |
| 25 | 0.973 | 0.007 | 0.974 | 0.006 | 0.959 | 0.034 | 0.936 | 0 | 0.919 | 0.014 |
| 26 | / | / | / | / | / | / | 0.955 | 0.032 | 0.931 | 0.005 |
| 27 | 0.981 | 0.061 | 0.979 | 0.01 | 0.983 | 0.041 | 0.983 | 0.002 | 0.98 | 0.036 |
| 28 | 0.955 | 0 | 0.979 | 0.045 | 0.926 | 0.047 | 0.916 | 0.024 | 0.729 | 0.03 |
| 29 | 0.962 | 0.006 | 0.957 | 0 | 0.979 | 0.043 | 0.874 | 0 | 0.926 | 0.029 |
| 30 | 0.957 | 0.051 | 0.949 | 0.014 | 0.978 | 0.03 | 0.892 | 0.006 | 0.923 | 0.047 |
| 31 | 0.976 | 0.051 | 0.983 | 0.051 | 0.983 | 0.035 | 0.973 | 0 | 0.982 | 0.083 |
| 32 | 0.968 | 0.053 | 0.973 | 0.001 | 0.957 | 0.027 | 0.964 | 0.003 | 0.962 | 0.064 |
| PRN | DOY 351 | DOY 352 | DOY 353 | DOY 354 | ||||||
| WSF | ASF | WSF | ASF | WSF | ASF | WSF | ASF | |||
| 1 | 0.984 | 0 | 0.978 | 0 | 0.984 | 0.02 | 0.986 | 0 | ||
| 2 | 0.938 | 0.051 | 0.952 | 0 | 0.95 | 0.019 | 0.961 | 0.011 | ||
| 3 | 0.923 | 0 | 0.96 | 0.108 | 0.947 | 0.098 | 0.976 | 0.108 | ||
| 4 | 0.987 | 0 | 0.982 | 0 | 0.987 | 0.03 | 0.989 | 0.019 | ||
| 5 | 0.941 | 0.003 | 0.961 | 0.014 | 0.949 | 0.026 | 0.956 | 0.019 | ||
| 6 | 0.842 | 0.044 | 0.943 | 0 | 0.928 | 0 | 0.96 | 0.07 | ||
| 7 | 0.904 | 0.095 | 0.974 | 0.028 | / | / | / | / | ||
| 8 | / | / | / | / | / | / | / | / | ||
| 9 | 0.894 | 0.013 | 0.967 | 0.029 | 0.95 | 0.014 | 0.976 | 0.032 | ||
| 10 | 0.881 | 0.005 | 0.935 | 0.032 | 0.919 | 0 | 0.94 | 0.021 | ||
| 11 | 0.985 | 0.021 | 0.977 | 0 | 0.986 | 0.027 | 0.986 | 0.012 | ||
| 12 | 0.907 | 0 | 0.976 | 0.035 | 0.972 | 0.008 | 0.979 | 0.027 | ||
| 13 | / | / | / | / | / | / | / | / | ||
| 14 | 0.977 | 0.011 | 0.981 | 0.081 | 0.977 | 0.039 | 0.981 | 0.028 | ||
| 15 | 0.917 | 0.003 | 0.98 | 0 | 0.982 | 0.021 | 0.98 | 0.024 | ||
| 16 | 0.984 | 0.003 | 0.978 | 0.003 | 0.964 | 0.015 | 0.983 | 0.081 | ||
| 17 | 0.821 | 0.015 | 0.949 | 0 | 0.923 | 0.046 | 0.968 | 0 | ||
| 18 | 0.932 | 0.008 | 0.979 | 0.027 | 0.98 | 0 | 0.979 | 0.013 | ||
| 19 | 0.978 | 0.036 | 0.972 | 0.01 | 0.971 | 0.024 | 0.979 | 0.017 | ||
| 20 | / | / | 0.727 | 0 | 0.832 | 0.013 | 0.897 | 0.015 | ||
| 21 | 0.949 | 0.03 | 0.982 | 0.018 | 0.979 | 0 | 0.98 | 0.023 | ||
| 22 | 0.977 | 0.056 | 0.985 | 0.01 | 0.983 | 0 | 0.981 | 0.033 | ||
| 23 | 0.865 | 0.075 | 0.953 | 0.07 | 0.923 | 0.018 | 0.967 | 0.052 | ||
| 24 | 0.943 | 0.01 | 0.974 | 0.034 | 0.981 | 0 | 0.978 | 0.02 | ||
| 25 | 0.934 | 0.044 | 0.98 | 0.019 | 0.976 | 0.005 | 0.974 | 0.004 | ||
| 26 | 0.949 | 0.021 | 0.977 | 0.014 | 0.969 | 0.01 | 0.975 | 0.043 | ||
| 27 | 0.985 | 0.006 | 0.983 | 0.02 | 0.98 | 0.024 | 0.988 | 0.07 | ||
| 28 | 0.795 | 0.085 | 0.926 | 0.032 | 0.906 | 0 | 0.965 | 0.024 | ||
| 29 | 0.901 | 0.02 | 0.978 | 0.025 | 0.978 | 0.015 | 0.975 | 0.024 | ||
| 30 | 0.91 | 0.018 | 0.982 | 0.005 | 0.975 | 0.004 | 0.985 | 0.012 | ||
| 31 | 0.987 | 0.035 | 0.985 | 0.018 | 0.983 | 0 | 0.988 | 0.003 | ||
| 32 | 0.977 | 0.038 | 0.968 | 0.032 | 0.953 | 0 | 0.977 | 0.039 | ||
| DOY | Variances of Time Series of Baseline Components (mm2) | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Without SF | MSF | ASF | |||||||
| N | E | U | N | E | U | N | E | U | |
| 336 | 14.81 | 10.50 | 60.37 | 4.52 (69.48) | 3.00 (71.43) | 19.73 (67.32) | 4.51 (69.55) | 2.99 (71.52) | 19.57 (67.58) |
| 337 | 13.96 | 10.50 | 60.08 | 5.28 (62.18) | 3.46 (67.05) | 21.03 (65.00) | 5.20 (62.75) | 3.40 (67.62) | 20.53 (65.83) |
| 338 | 14.65 | 10.14 | 56.09 | 5.56 (62.05) | 3.45 (65.98) | 20.12 (64.13) | 5.53 (62.25) | 3.44 (66.07) | 20.03 (64.29) |
| 339 | 14.36 | 10.48 | 57.79 | 5.36 (62.67) | 3.10 (70.42) | 19.88 (65.60) | 5.35 (62.74) | 3.08 (70.61) | 19.79 (65.76) |
| 340 | 14.59 | 10.23 | 60.26 | 4.41 (69.77) | 2.84 (72.24) | 18.50 (69.30) | 4.35 (70.19) | 2.79 (72.73) | 18.10 (69.96) |
| 341 | 13.58 | 10.00 | 56.40 | 4.78 (64.80) | 2.84 (71.60) | 18.16 (67.80) | 4.77 (64.87) | 2.82 (71.80) | 18.06 (67.98) |
| 342 | 13.52 | 10.18 | 56.66 | 3.80 (71.89) | 2.67 (73.77) | 16.23 (71.36) | 3.78 (72.04) | 2.66 (73.87) | 16.11 (71.57) |
| 343 | 13.73 | 10.40 | 57.06 | 3.87 (71.81) | 2.69 (74.13) | 16.18 (71.64) | 3.85 (71.96) | 2.68 (74.23) | 16.11 (71.77) |
| 344 | 13.05 | 10.27 | 53.92 | 5.32 (59.23) | 3.69 (64.07) | 21.48 (60.16) | 5.30 (59.39) | 3.67 (64.26) | 21.33 (60.44) |
| 345 | 16.10 | 12.51 | 66.65 | 6.23 (61.30) | 4.20 (66.43) | 26.08 (60.87) | 6.21 (61.43) | 4.19 (66.51) | 25.94 (61.08) |
| 346 | 14.68 | 10.61 | 60.06 | 4.77 (67.51) | 3.30 (68.90) | 20.93 (65.15) | 4.76 (67.57) | 3.30 (68.90) | 20.86 (65.27) |
| 347 | 14.36 | 10.25 | 58.68 | 4.36 (69.64) | 2.89 (71.80) | 18.09 (69.17) | 4.35 (69.71) | 2.88 (71.90) | 17.94 (69.43) |
| 348 | 13.55 | 10.12 | 56.54 | 4.81 (64.50) | 2.89 (71.44) | 18.80 (66.75) | 4.80 (64.58) | 2.88 (71.54) | 18.72 (66.89) |
| 349 | 13.48 | 10.50 | 56.10 | 3.64 (73.00) | 2.66 (74.67) | 16.29 (70.96) | 3.63 (73.07) | 2.64 (74.86) | 16.18 (71.16) |
| 350 | 13.61 | 10.11 | 55.86 | 3.93 (71.12) | 2.77 (72.60) | 16.70 (70.10) | 3.92 (71.20) | 2.76 (72.70) | 16.59 (70.30) |
| 351 | 13.54 | 10.06 | 53.73 | 3.88 (71.34) | 2.68 (73.36) | 17.46 (67.50) | 3.87 (71.42) | 2.67 (73.46) | 17.36 (67.69) |
| 352 | 13.48 | 9.97 | 52.79 | 3.90 (71.07) | 2.71 (72.82) | 18.94 (64.12) | 3.81 (71.74) | 2.60 (73.92) | 17.58 (66.70) |
| 353 | 14.79 | 10.05 | 53.52 | 4.08 (72.41) | 2.77 (72.44) | 18.35 (65.71) | 3.88 (73.77) | 2.66 (73.53) | 16.91 (68.40) |
| 354 | 13.61 | 9.72 | 52.16 | 3.98 (70.76) | 2.73 (71.91) | 17.94 (65.61) | 3.84 (71.79) | 2.62 (73.05) | 16.72 (67.94) |
| Ave. | 14.08 | 10.35 | 57.09 | 4.55 (67.68) | 3.02 (70.82) | 18.99 (66.74) | 4.51 (67.97) | 2.99 (71.11) | 18.65 (77.12) |
References
- Teunissen, P.; Kleusberg, A. GPS for Geodesy, 2nd ed.; Springer: Heidelberg, Germany, 1998; pp. 625–648. ISBN 978-3-642-72013-0. [Google Scholar]
- Bock, Y.; Melgar, D. Physical applications of GPS geodesy: A review. Rep. Prog. Phys. 2016, 79, 106801. [Google Scholar] [CrossRef] [PubMed]
- Nikolaidis, R.; Bock, Y.; Jonge, P.; Shearer, P.; Agnew, D.; Domselaar, M. Seismic wave observations with the Global Positioning System. J. Geophys. Res. 2001, 106, 21897–21916. [Google Scholar] [CrossRef]
- Larson, K. GPS seismology. J. Geod. 2009, 83, 227–233. [Google Scholar] [CrossRef]
- Geng, J.; Jiang, P.; Liu, J. Integrating GPS with GLONASS for high-rate seismogeodesy. Geophys. Res. Lett. 2017, 44, 3139–3146. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Herring, T.; Rocken, C.; Anthes, R.; Ware, R. GPS meteorology: Remote sensing of atmospheric water vapor using the Global Positioning System. J. Geophys. Res. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Fang, P.; Bevis, M.; Bock, Y.; Gutman, S.; Wolfe, D. GPS meteorology: Reducing systematic errors in geodetic estimates for zenith delay. Geophys. Res. Lett. 1998, 25, 3583–3586. [Google Scholar] [CrossRef]
- Li, X.; Zus, F.; Lu, C.; Ning, T.; Dick, G.; Ge, M.; Wickert, J.; Schuh, H. Retrieving high-resolution tropospheric gradients from multiconstellation GNSS observations. Geophys. Res. Lett. 2015, 42, 4173–4181. [Google Scholar] [CrossRef]
- Park, K.; Nerem, R.; Schenewerk, M.; Davis, J. Site-specific multipath characteristics of global IGS and CORS GPS sites. J. Geod. 2004, 77, 799–803. [Google Scholar] [CrossRef]
- Bock, Y. Continuous monitoring of crustal deformation. GPS World 1991, 2, 40–47. [Google Scholar]
- Genrich, J.; Bock, Y. Rapid resolution of crustal motion at short ranges with the Global Positioning System. J. Geophys. Res. 1992, 97, 3261–3269. [Google Scholar] [CrossRef]
- Bock, Y.; Nikolaidis, R.; Jonge, P.; Bevis, M. Instantaneous geodetic positioning at medium distances with the Global Positioning System. J. Geophy. Res. 2000, 105, 28223–28253. [Google Scholar] [CrossRef]
- Bock, Y.; Prawirodirdjo, L.; Melbourne, T. Detection of arbitrarily large dynamic ground motions with a dense high-rate GPS network. Geophys. Res. Lett. 2004, 31, L06604. [Google Scholar] [CrossRef]
- Larson, K.; Bodin, P.; Gomberg, J. Using 1-Hz GPS data to measure deformations caused by the Denali fault earthquake. Science 2003, 300, 1421–1424. [Google Scholar] [CrossRef] [PubMed]
- Wübbena, G.; Schmitz, M.; Menge, F.; Seeber, G.; Völksen, C. A new approach for field calibration of absolute GPS antenna phase center variations. Navigation 1997, 44, 247–255. [Google Scholar] [CrossRef]
- Seeber, G.; Menge, F.; Völksen, C.; Wübbena, G.; Schmitz, M. Precise GPS positioning improvements by reducing antenna and site dependent effects. In Advances in Positioning and Reference Frames; Springer: Heidelberg, Germany, 1998; pp. 237–244. ISBN 978-3-642-08425-6. [Google Scholar]
- Langbein, J.; Bock, Y. High-rate real-time GPS network at Parkfield: Utility for detecting fault slip and seismic displacements. Geophys. Res. Lett. 2004, 31, L15S20. [Google Scholar] [CrossRef]
- Ragheb, A.; Clarke, P.; Edwards, S. Coordinate-space and observation-space filtering methods for sidereally repeating errors in GPS. In Proceedings of the 2007 National Technical Meeting of the Institute of Navigation, San Diego, CA, USA, 22–24 January 2007; pp. 480–485. [Google Scholar]
- Dong, D.; Wang, M.; Chen, W.; Zeng, Z.; Song, L.; Zhang, Q.; Cai, M.; Cheng, Y.; Lv, J. Mitigation of multipath effect in GNSS short baseline positioning by the multipath hemispherical map. J. Geodesy 2016, 90, 255–262. [Google Scholar] [CrossRef]
- Choi, K.; Bilich, A.; Larson, K.; Axelrad, P. Modified sidereal filtering: Implications for high-rate GPS positioning. Geophys. Res. Lett. 2004, 31, L22608. [Google Scholar] [CrossRef]
- Axelrad, P.; Larson, K.; Jones, B. Use of the correct satellite repeat period to characterize and reduce site-specific multipath errors. In Proceedings of the ION GNSS 18th International Technical Meeting of the Satellite Division, Long Beach, CA, USA, 13–16 September 2005; pp. 2638–2648. [Google Scholar]
- Agnew, D.; Larson, K. Finding the repeat times of the GPS constellation. GPS Solut. 2007, 11, 71–76. [Google Scholar] [CrossRef]
- Larson, K.; Bilich, A.; Axelrad, P. Improving the precision of high-rate GPS. J. Geophys. Res. 2007, 112, B05422. [Google Scholar] [CrossRef]
- Ragheb, A.; Clarke, P.; Edwards, S. GPS sidereal filtering: Coordinate and carrier-phase-level strategies. J. Geod. 2007, 81, 325–335. [Google Scholar] [CrossRef]
- Zhong, P.; Ding, X.; Yuan, L.; Xu, Y.; Kwok, K.; Chen, Y. Sidereal filtering based on single differences for mitigating GPS multipath effects on short baselines. J. Geod. 2010, 84, 145–158. [Google Scholar] [CrossRef]
- Ye, S.; Chen, D.; Liu, Y.; Jiang, P.; Tang, W.; Xia, P. Carrier phase multipath mitigation for BeiDou navigation satellite system. GPS Solut. 2015, 19, 545–557. [Google Scholar] [CrossRef]
- Alber, C.; Ware, R.; Rocken, C.; Braun, J. Obtaining single path phase delays from GPS double differences. Geophys. Res. Lett. 2000, 27, 2661–2664. [Google Scholar] [CrossRef]
- Dong, D.; Chen, W.; Cai, M.; Zhou, F.; Wang, M.; Yu, C.; Zheng, Z.; Wang, Y. Multi-antenna synchronized global navigation satellite system receiver and its advantages in high-precision positioning applications. Front. Earth Sci. 2016, 10, 772–783. [Google Scholar] [CrossRef]
- Atkins, C.; Ziebart, M. Effectiveness of observation-domain sidereal filtering for GPS precise point positioning. GPS Solut. 2016, 20, 111–122. [Google Scholar] [CrossRef]
- Geng, J.; Pan, Y.; Li, X.; Guo, J.; Liu, J.; Chen, X.; Zhang, Y. Noise characteristics of high-rate multi-GNSS for subdaily crustal deformation monitoring. J. Geophys. Res. 2018, 123, 1987–2002. [Google Scholar] [CrossRef]
- Cai, M.; Chen, W.; Dong, D.; Yu, C.; Zheng, Z.; Zhou, F.; Wang, M.; Yue, W. Ground-based phase wind-up and its application in yaw angle determination. J. Geod. 2016, 90, 757–772. [Google Scholar] [CrossRef]
- Nickitopoulou, A.; Protopsalti, K.; Stiros, S. Monitoring dynamic and quasi-static deformations of large flexible engineering structures with GPS: Accuracy, limitations and promises. Eng. Struct. 2006, 28, 1471–1482. [Google Scholar] [CrossRef]
- Paziewski, J.; Sieradzki, R.; Baryla, R. Multi-GNSS high-rate RTK, PPP and novel direct phase observation processing method: Application to precise dynamic displacement detection. Meas. Sci. Technol. 2017, 29, 035002. [Google Scholar] [CrossRef]
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]













| PRN | DOY 341 | DOY 342 | DOY 343 | |||
|---|---|---|---|---|---|---|
| WSF | ASF | WSF | ASF | WSF | ASF | |
| 1 | 0.945 | 0.069 | 0.960 | 0.008 | 0.980 | 0.022 |
| 7 | 0.961 | 0.058 | 0.962 | 0.008 | 0.968 | 0.024 |
| 10 | 0.940 | 0.056 | 0.952 | 0.012 | 0.941 | 0.022 |
| 11 | 0.970 | 0.040 | 0.981 | 0.007 | 0.984 | 0.018 |
| 12 | 0.979 | 0.009 | 0.979 | 0.018 | 0.979 | 0.032 |
| 20 | 0.956 | 0.008 | 0.966 | 0.035 | 0.985 | 0.048 |
| 21 | 0.982 | 0.015 | 0.982 | 0.008 | 0.967 | 0.011 |
| 30 | 0.959 | 0.037 | 0.971 | 0.015 | 0.955 | 0.036 |
| 31 | 0.985 | 0.020 | 0.987 | 0.021 | 0.982 | 0.013 |
| 32 | 0.941 | 0.030 | 0.976 | 0.014 | 0.971 | 0.009 |
| DOY | Variances of Time Series of Baseline Components (mm2) | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Without SF | MSF | ASF | |||||||
| N | E | U | N | E | U | N | E | U | |
| 336 | 14.81 | 10.50 | 60.37 | 4.52 (69.48) | 3.00 (71.43) | 19.73 (67.32) | 4.51 (69.55) | 2.99 (71.52) | 19.57 (67.58) |
| 341 | 13.58 | 10.00 | 56.40 | 4.78 (64.80) | 2.84 (71.60) | 18.16 (67.80) | 4.77 (64.87) | 2.82 (71.80) | 18.06 (67.98) |
| 342 | 13.52 | 10.18 | 56.66 | 3.80 (71.89) | 2.67 (73.77) | 16.23 (71.36) | 3.78 (72.04) | 2.66 (73.87) | 16.11 (71.57) |
| 353 | 14.79 | 10.05 | 53.52 | 4.08 (72.41) | 2.77 (72.44) | 18.35 (65.71) | 3.88 (73.77) | 2.66 (73.53) | 16.91 (68.40) |
| 354 | 13.61 | 9.72 | 52.16 | 3.98 (70.76) | 2.73 (71.91) | 17.94 (65.61) | 3.84 (71.79) | 2.62 (73.05) | 16.72 (67.94) |
| Ave. | 14.08 | 10.35 | 57.09 | 4.55 (67.68) | 3.02 (70.82) | 18.99 (66.74) | 4.51 (67.97) | 2.99 (71.11) | 18.65 (77.12) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, M.; Wang, J.; Dong, D.; Chen, W.; Li, H.; Wang, Z. Advanced Sidereal Filtering for Mitigating Multipath Effects in GNSS Short Baseline Positioning. ISPRS Int. J. Geo-Inf. 2018, 7, 228. https://doi.org/10.3390/ijgi7060228
Wang M, Wang J, Dong D, Chen W, Li H, Wang Z. Advanced Sidereal Filtering for Mitigating Multipath Effects in GNSS Short Baseline Positioning. ISPRS International Journal of Geo-Information. 2018; 7(6):228. https://doi.org/10.3390/ijgi7060228
Chicago/Turabian StyleWang, Minghua, Jiexian Wang, Danan Dong, Wen Chen, Haojun Li, and Zhiren Wang. 2018. "Advanced Sidereal Filtering for Mitigating Multipath Effects in GNSS Short Baseline Positioning" ISPRS International Journal of Geo-Information 7, no. 6: 228. https://doi.org/10.3390/ijgi7060228
APA StyleWang, M., Wang, J., Dong, D., Chen, W., Li, H., & Wang, Z. (2018). Advanced Sidereal Filtering for Mitigating Multipath Effects in GNSS Short Baseline Positioning. ISPRS International Journal of Geo-Information, 7(6), 228. https://doi.org/10.3390/ijgi7060228