Continuous-Scale 3D Terrain Visualization Based on a Detail-Increment Model

Abstract
:1. Introduction
2. Method
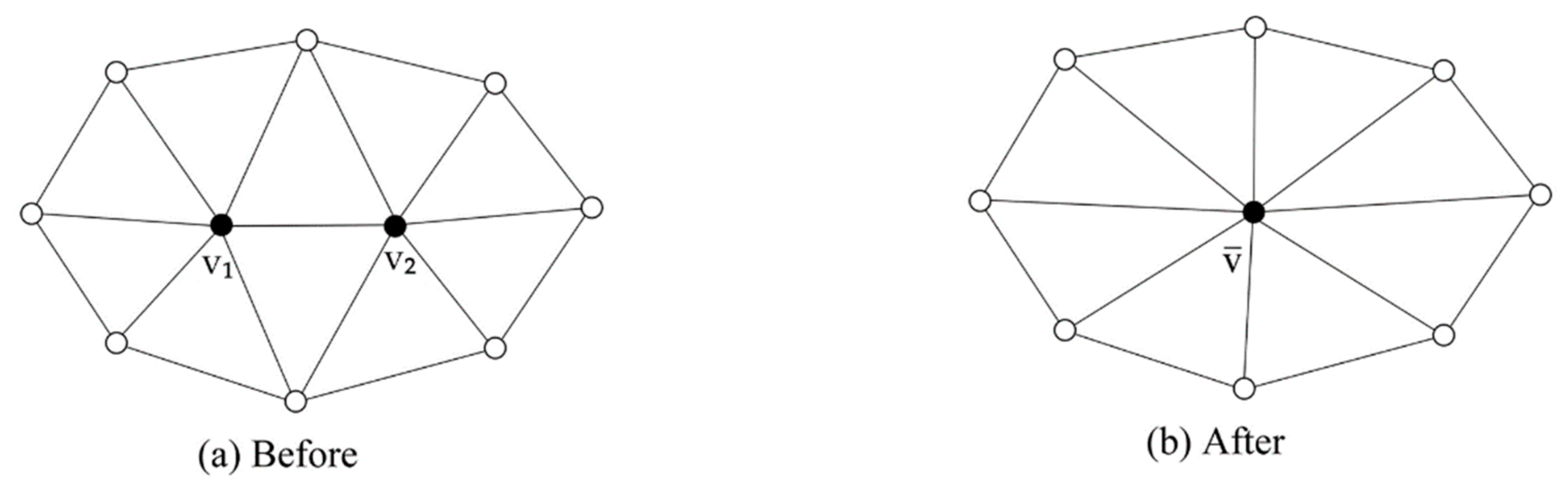
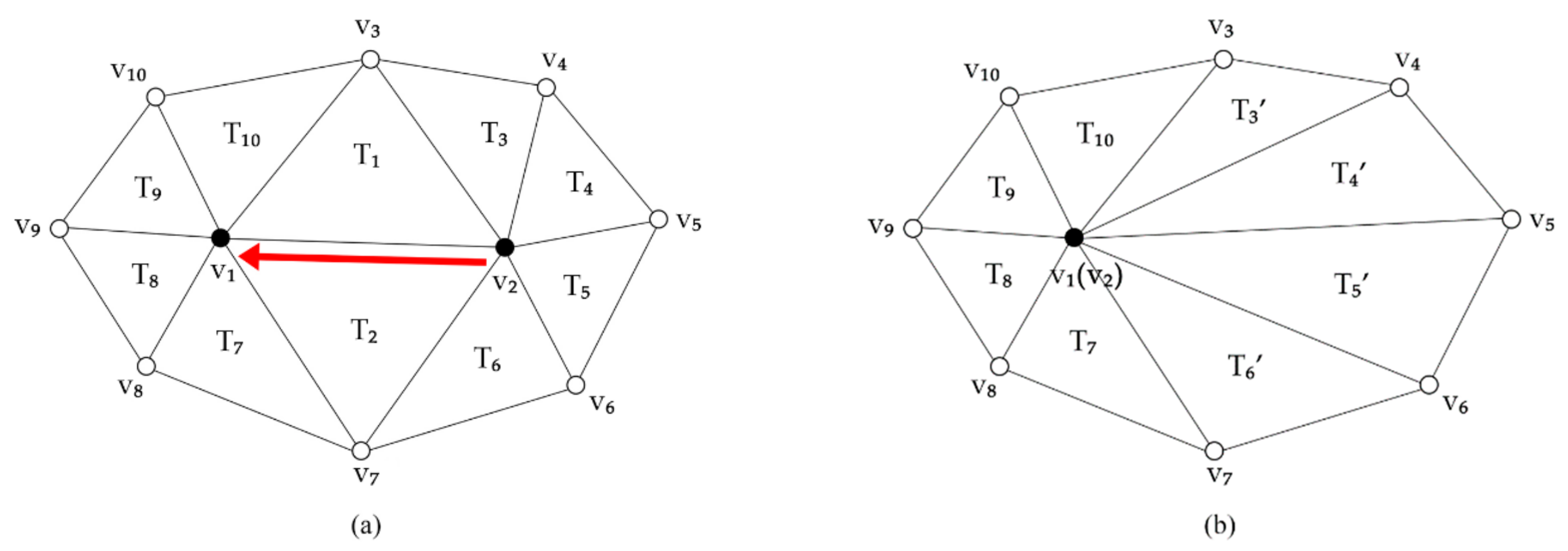
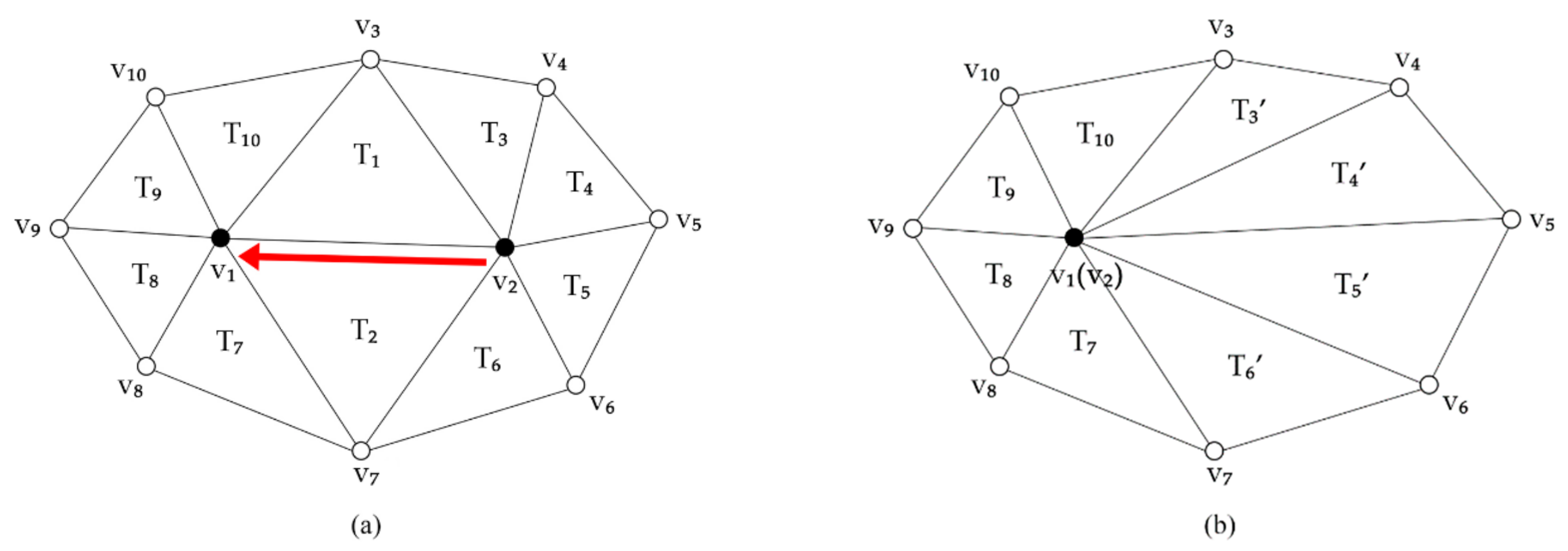
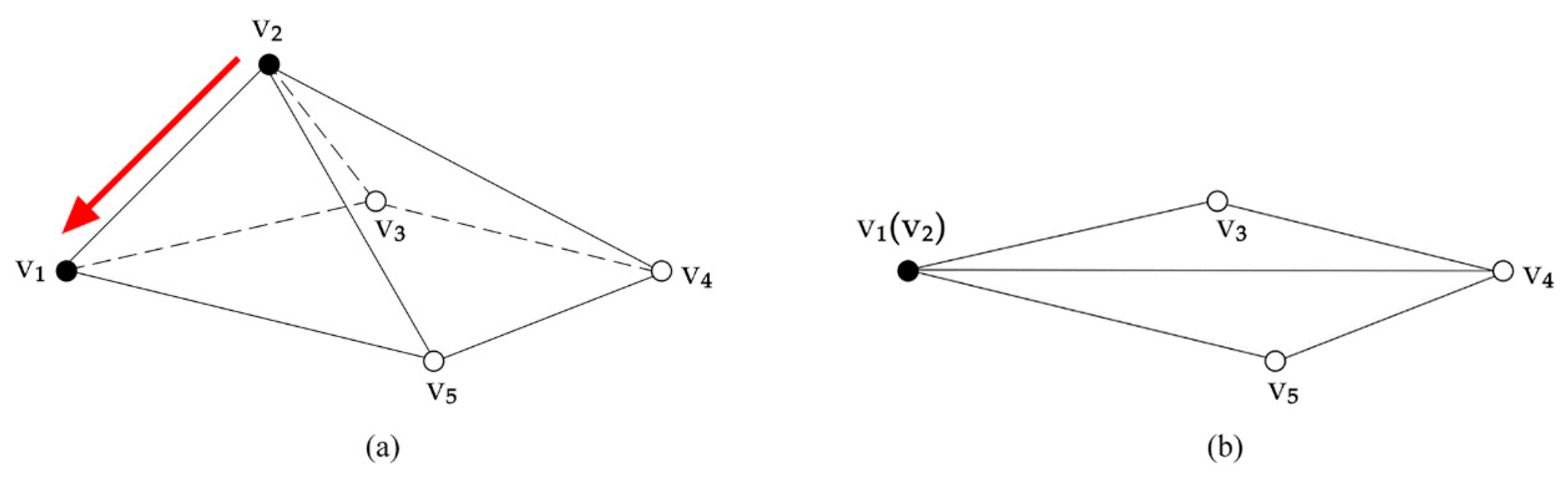
2.1. LOD Simplification Algorithm
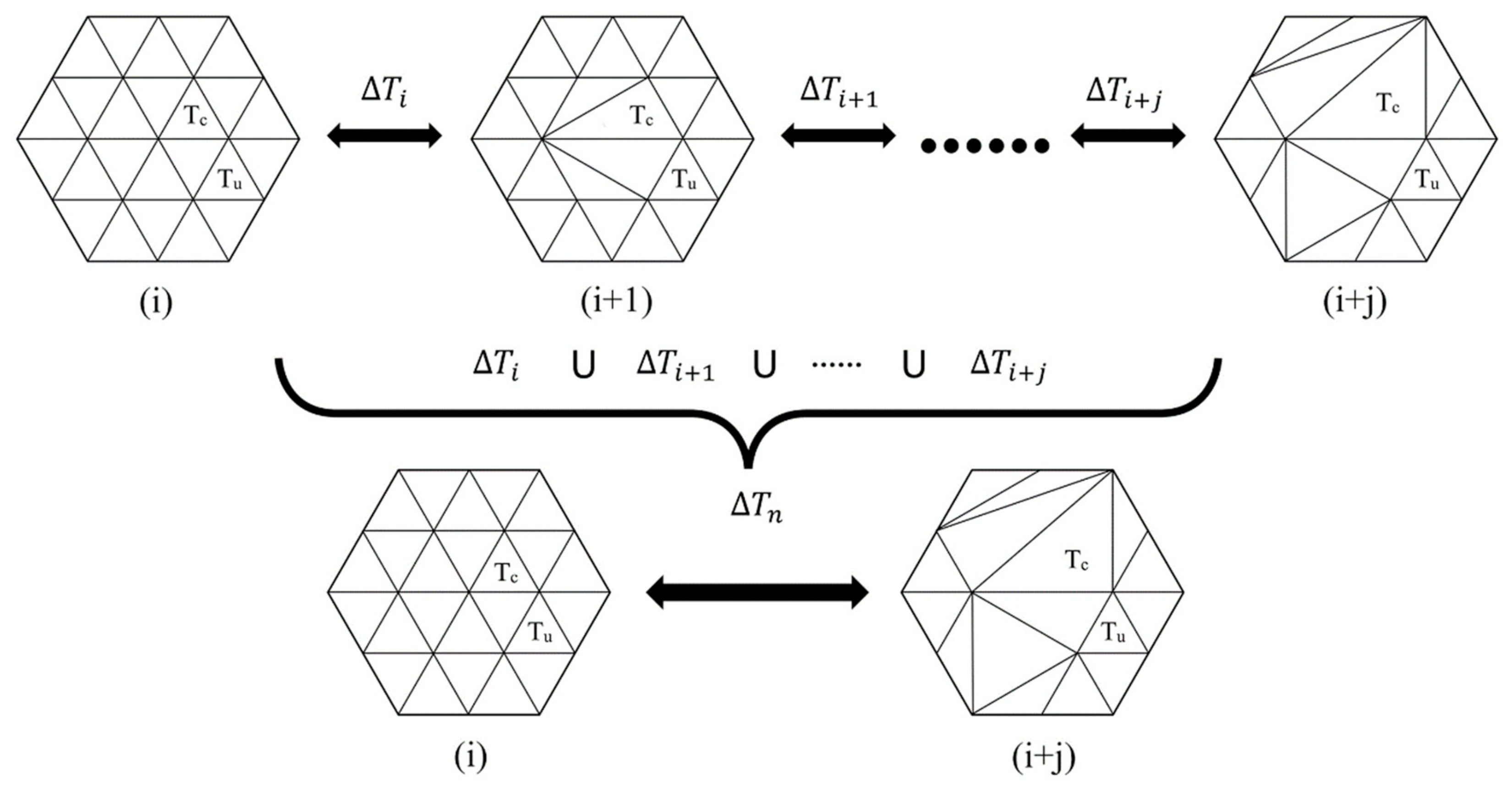
2.2. Incremental and Hierarchical Data Structure
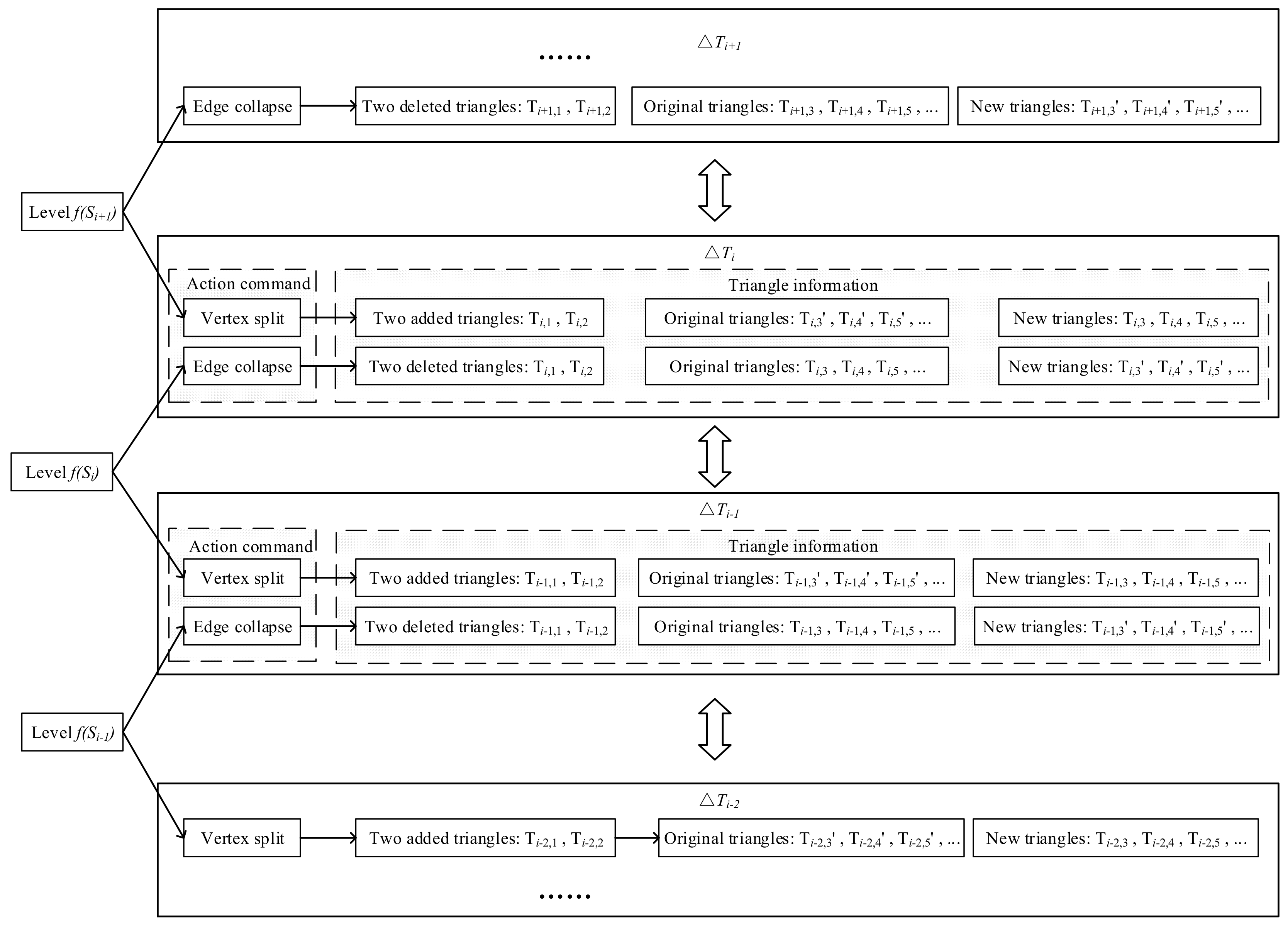
2.2.1. Storage Structure of Incremental Information
- (1)
- Traversing all the scales before the current scale;
- (2)
- Comparing the size of the triangular index in the current scale with the deleted triangular indices in the former scales;
- (3)
- Setting an int-parameter. When the deleted triangular index in the former scales is larger than the triangular index in the current scale, the parameter is increased by 1;
- (4)
- After traversing, the new index in the current scale can be recalculated by subtracting the parameter from the initial index. These steps are performed for each scale.
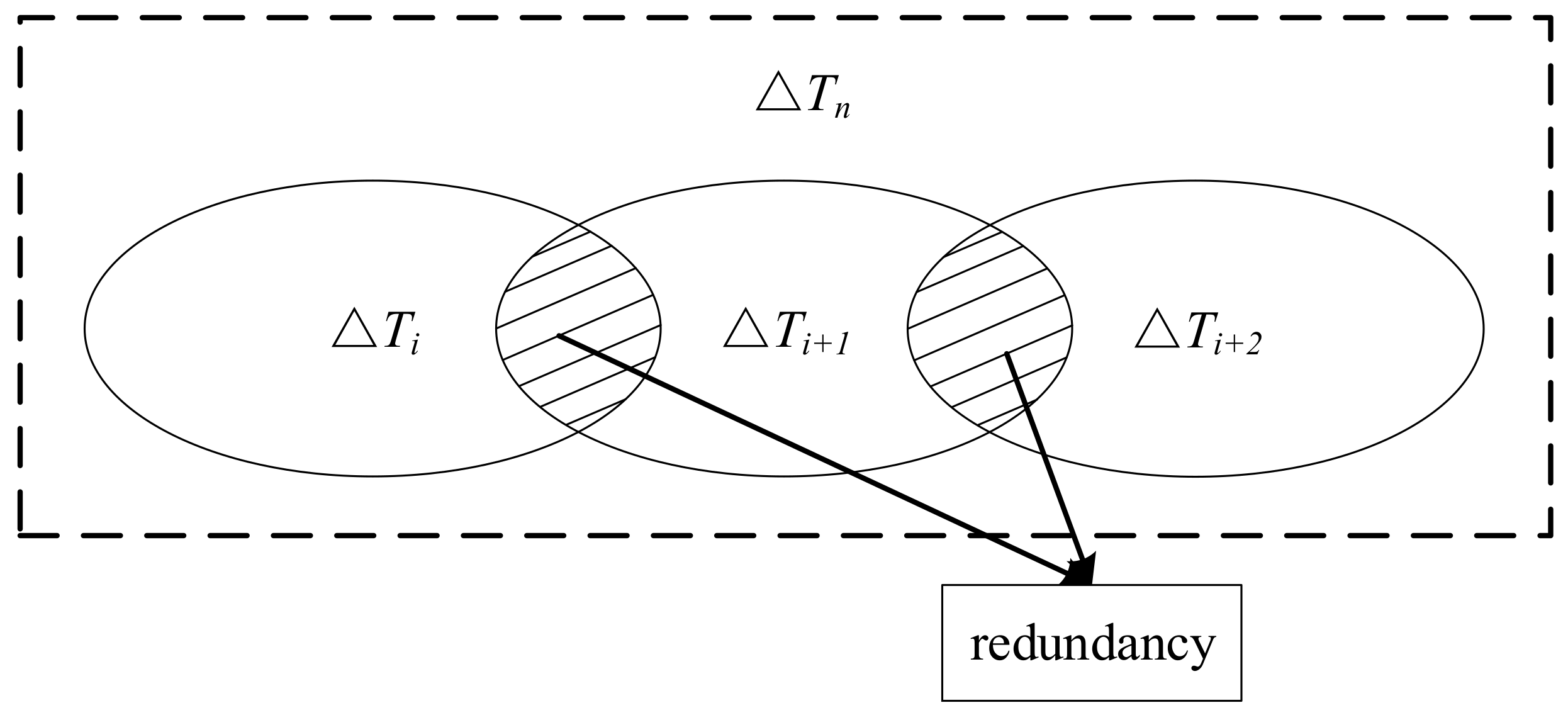
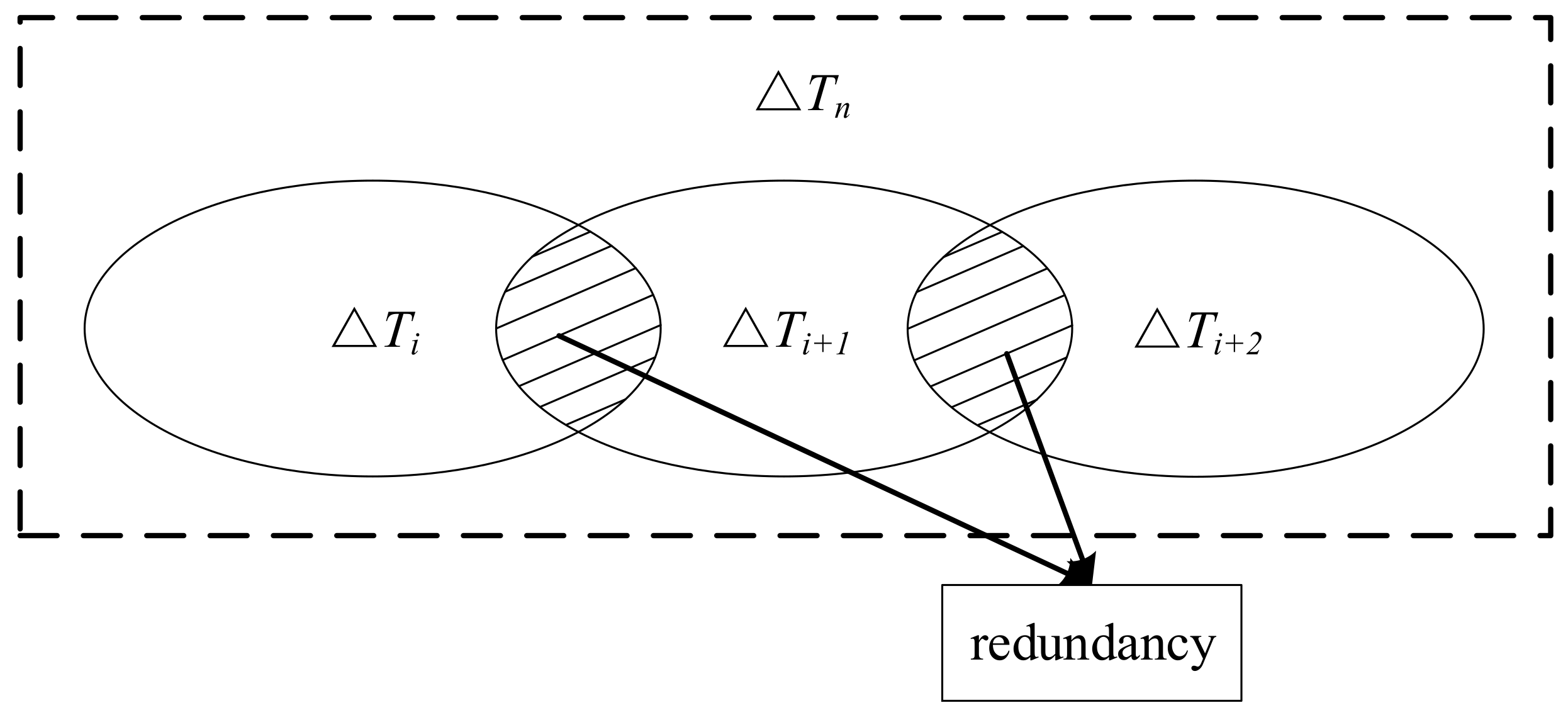
2.2.2. Compression of Incremental Information
- (1)
- If the changed triangle is stored only once, there is no need to compress it, irrespective of whether it is eventually replaced or deleted.
- (2)
- If the changed triangle is stored more than once, and the final result is replaced, then only the original triangle and last replacement need to be retained. The changed information, stored in the middle, can be omitted.
- (3)
- If the changed triangle is stored more than once, and the final result is deleted, then only the initial information on the original triangle needs to be retained as deleted information. All of its changing processes can be omitted.
- (1)
- The number of scales to be merged which can be stored only once.
- (2)
- The total number of triangles changed at the current scale, which includes the deleted triangles and the replaced triangles.
- (3)
- The index information on the deleted triangles.
- (4)
- The index information on the replaced triangles.
- (5)
- The index information on the vertices of the deleted triangles.
- (6)
- The index information on the vertices of the replaced original triangles.
- (7)
- The index information on the vertices of the replaced new triangles.
2.3. Visualization of Continuous-Scale Models
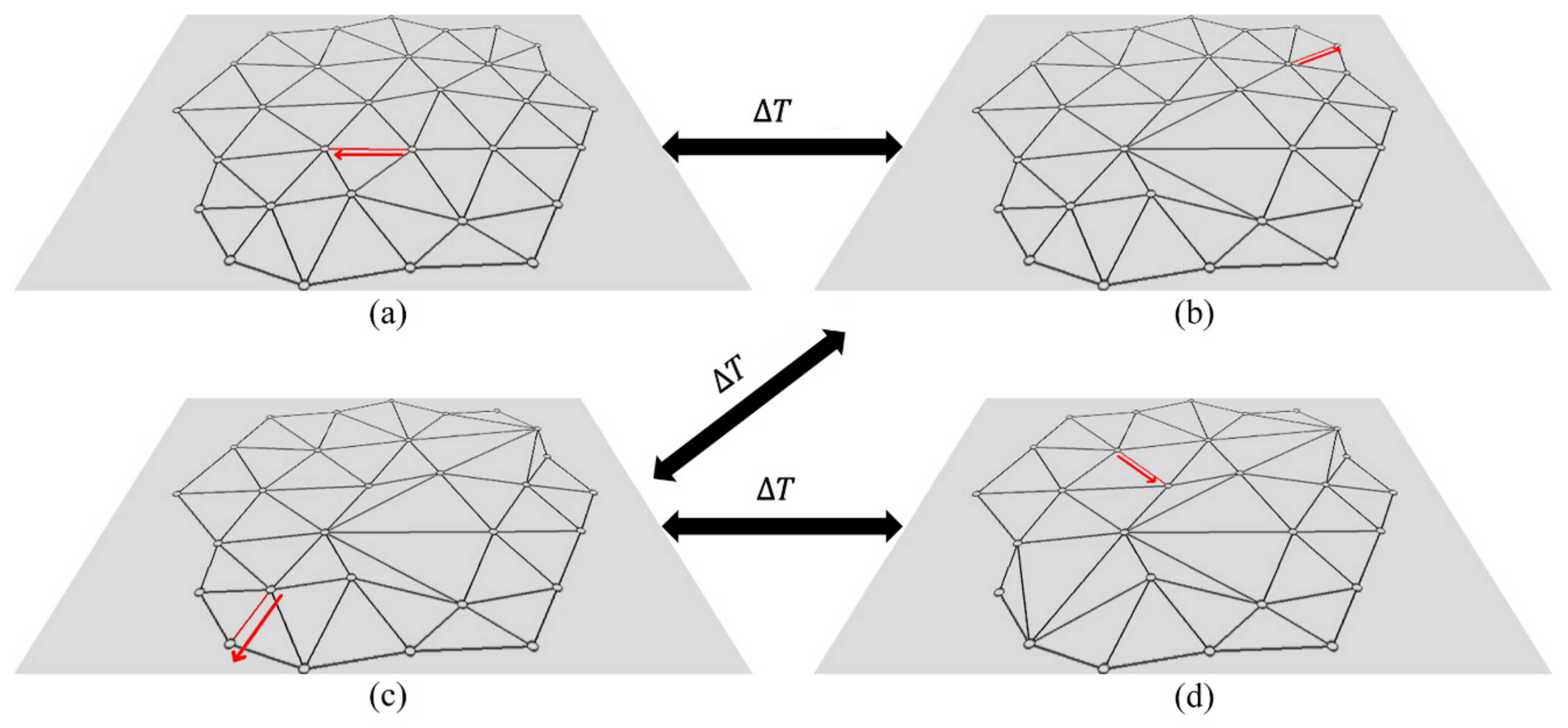
2.3.1. Reconstruction of Continuous-Scale Models
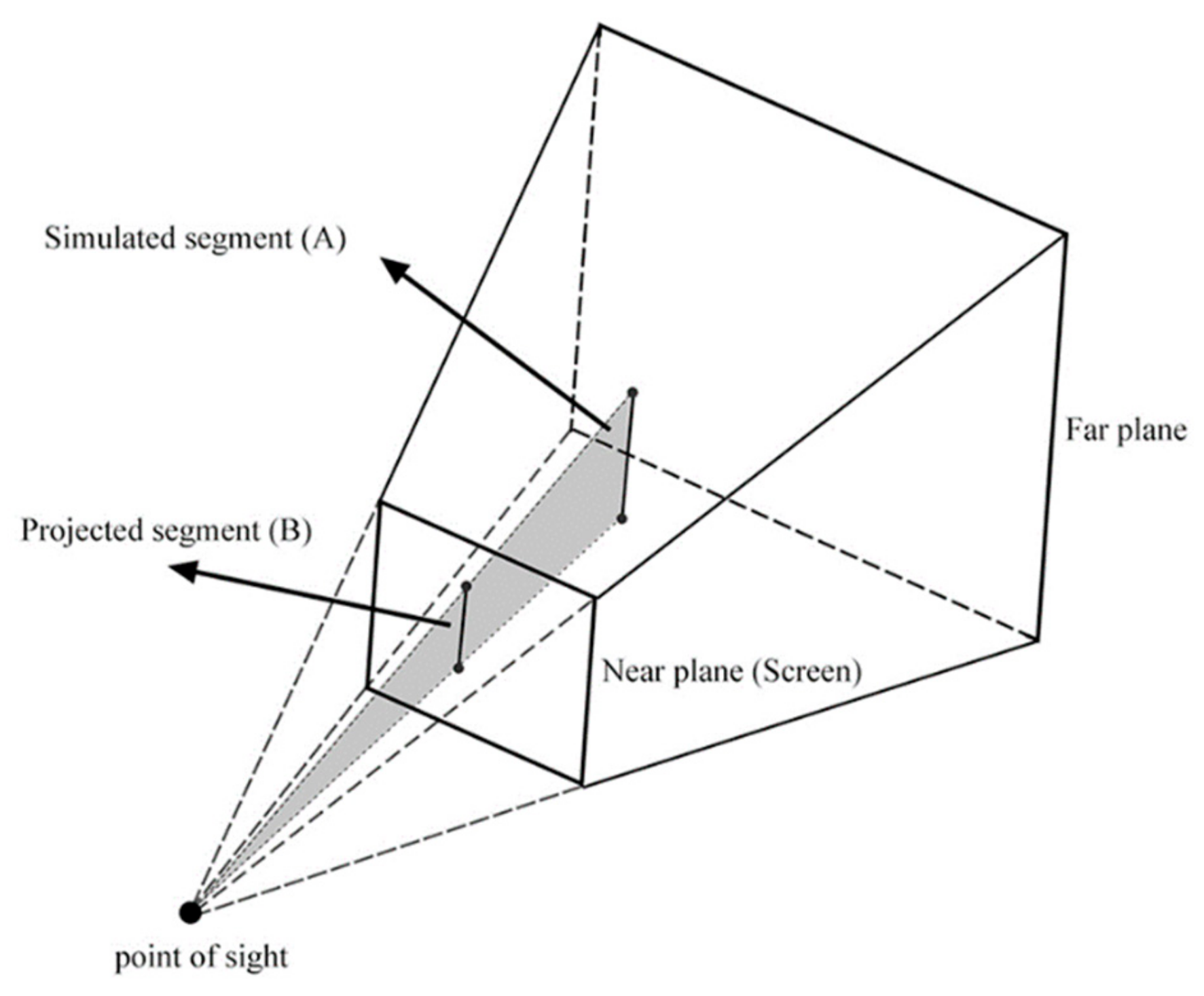
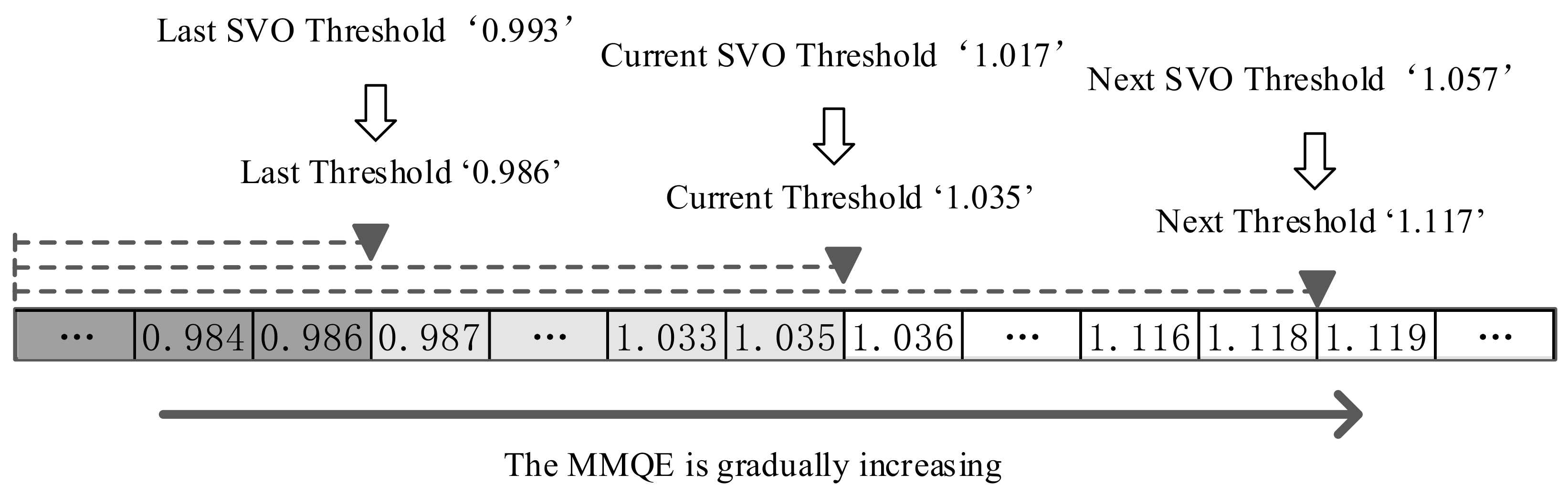
2.3.2. Progressive Representation Based on SVO
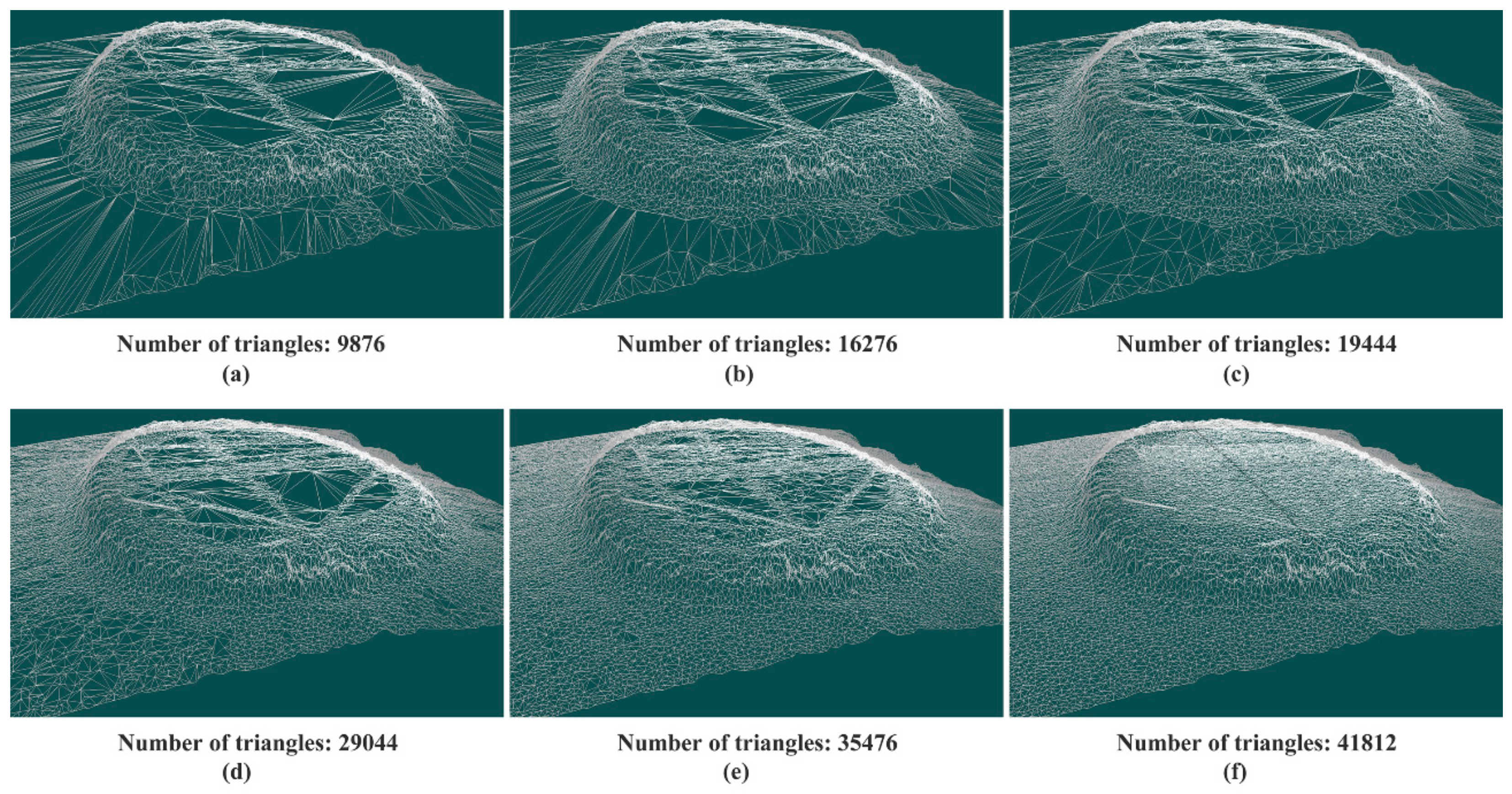
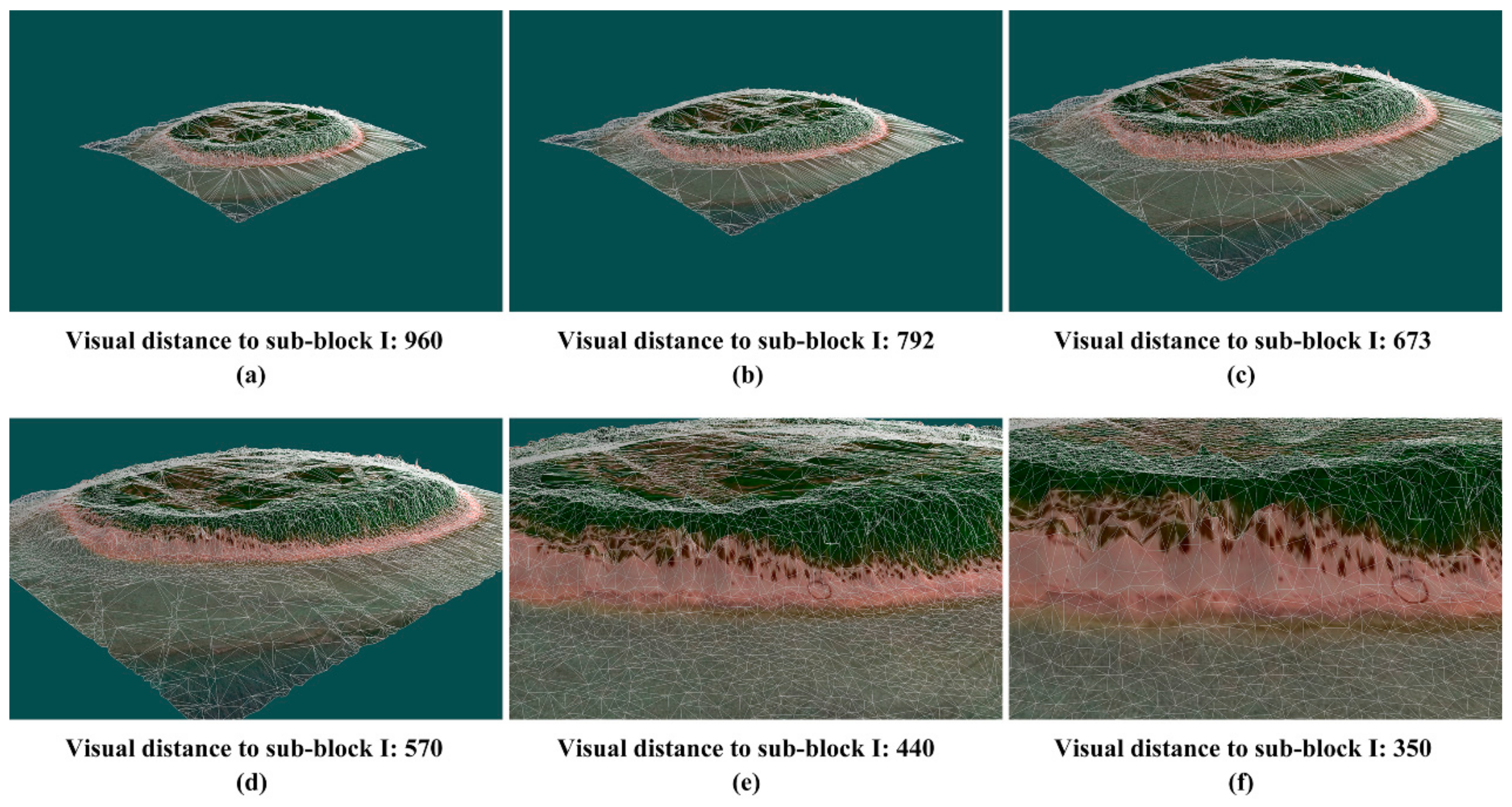
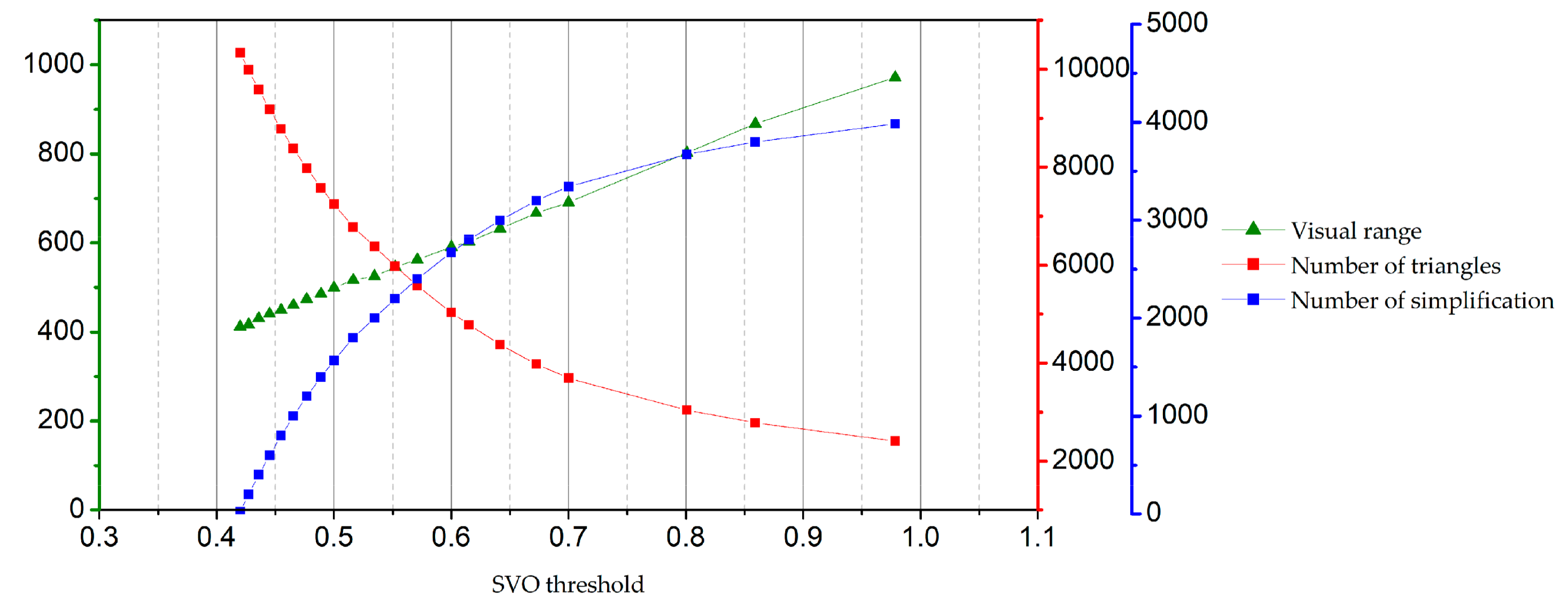
3. Experiments
4. Discussion
- (1)
- Since the stored content contains incremental information and the most simplified model version, and the incremental information mainly concerns the triangular index and the three-vertex indices, the storage space is much lower than the conventional static LOD. Besides, the algorithm can compress the incremental information, as needed, to further reduce the storage space, thus reducing the number of triangle changes during reconstruction and improving the fluency of scale transition.
- (2)
- The algorithm uses edge collapse based on QEM in the process of simplification. The method has a low computational complexity and is easily implemented compared to previously published techniques.
- (3)
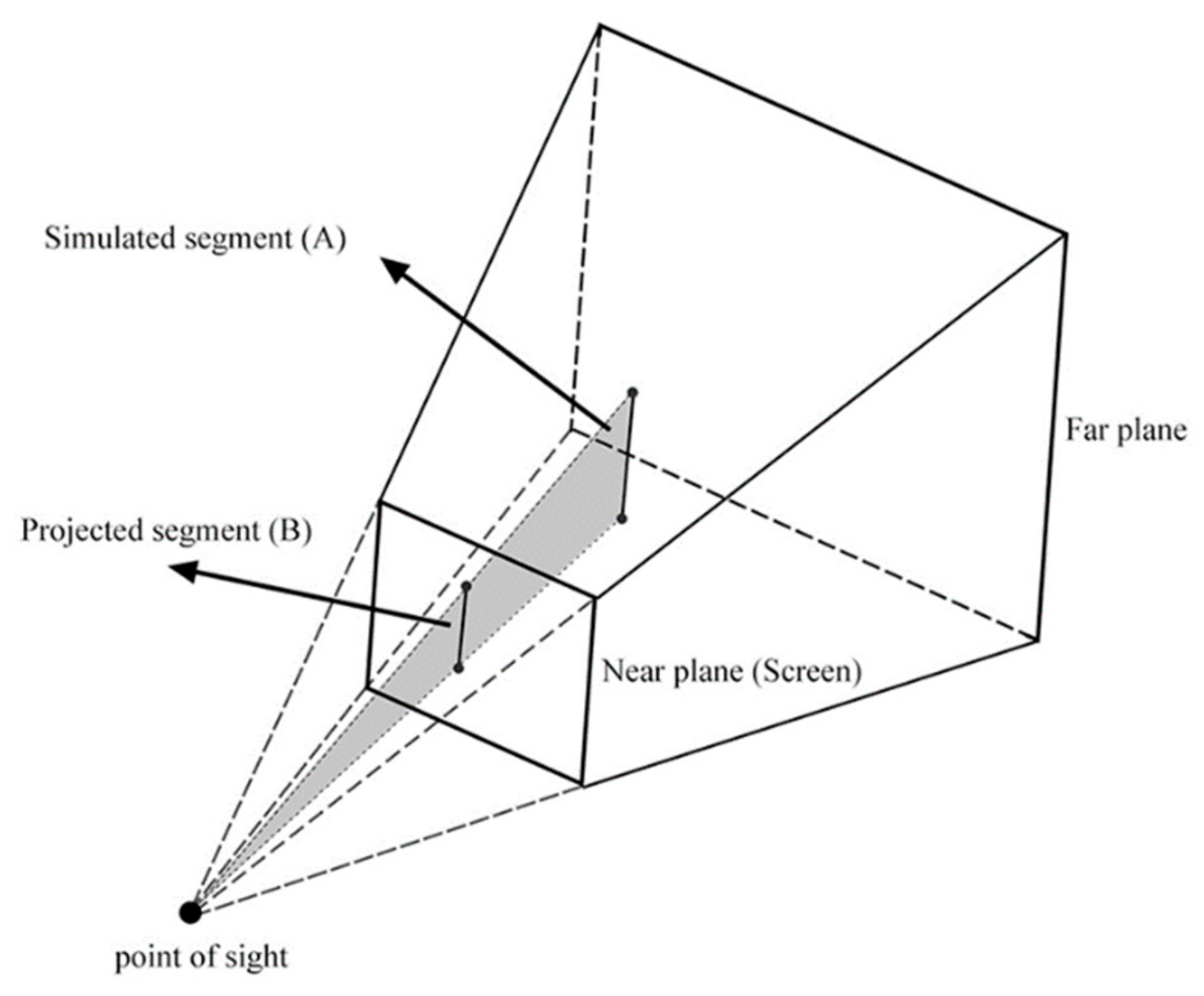
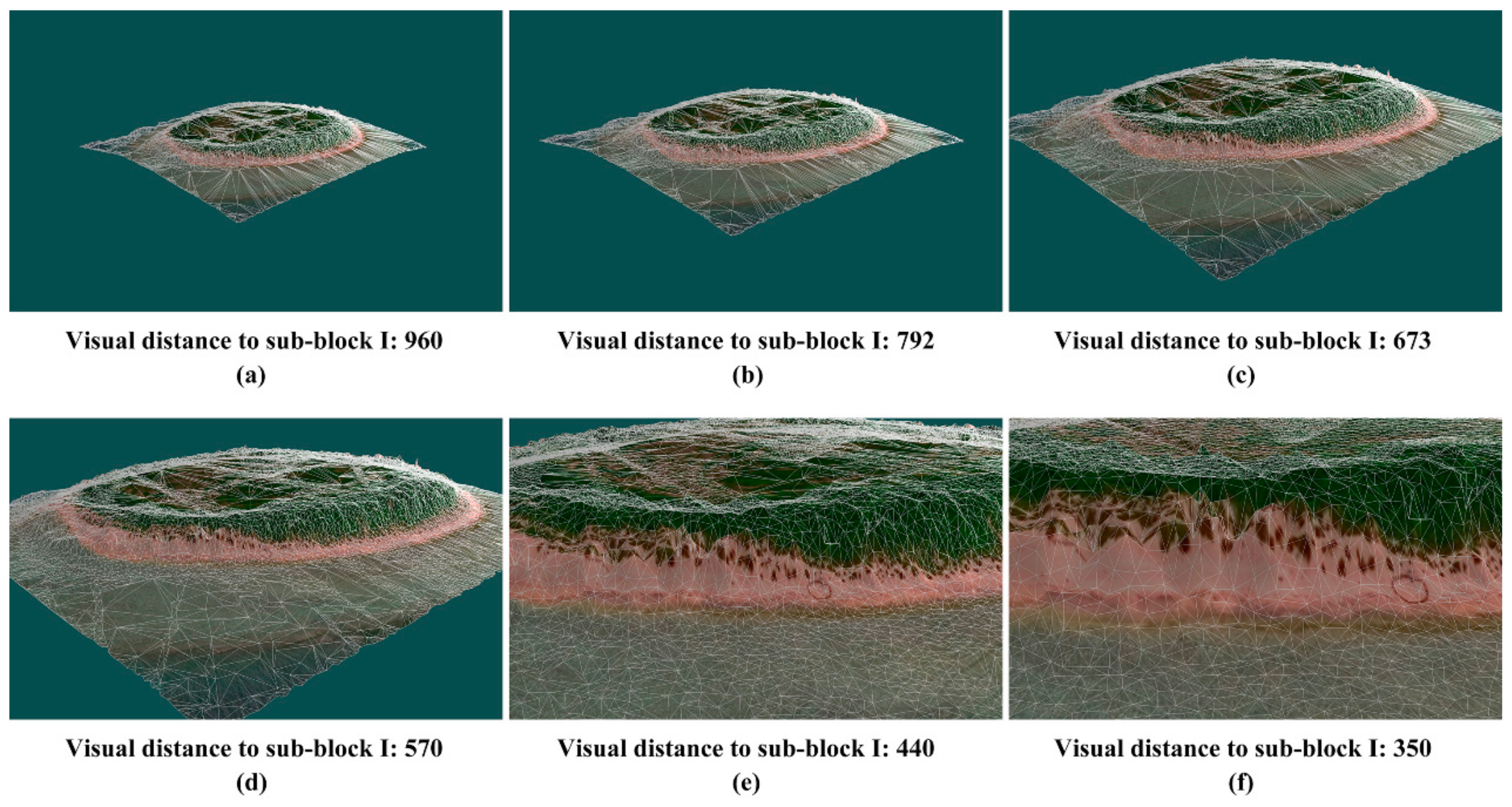
- This algorithm defines SVO as a threshold for the visualization of the terrain model, which can realize continuous scale transitions of the terrain model, with a visual range. Its effect is better than that of the conventional static progressive representation.
5. Conclusions
6. Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Petrie, G.; Kennie, T.J.M. Terrain modelling in surveying and civil engineering. Comput. Aided Des. 1987, 19, 171–187. [Google Scholar] [CrossRef]
- Kidner, D.B.; Ware, J.M.; Sparkes, A.J.; Jones, C.B. Multiscale terrain and topographic modelling with the implicit TIN. Trans. GIS 2000, 4, 361–378. [Google Scholar] [CrossRef]
- Schroeder, W.J.; Zarge, J.A.; Lorensen, W.E. Decimation of triangle meshes. Siggraph 1992, 92, 65–70. [Google Scholar] [CrossRef]
- Oryspayev, D.; Sugumaran, R.; DeGroote, J.; Gray, P. LiDAR data reduction using vertex decimation and processing with GPGPU and multicore CPU technology. Comput. Geosci. 2012, 43, 118–125. [Google Scholar] [CrossRef]
- Li, W.; Chen, Y.; Wang, Z.; Zhao, W.; Chen, L. An improved decimation of triangle meshes based on curvature. In Proceedings of the International Conference on Rough Sets and Knowledge Technology, Shanghai, China, 24–26 October 2014; pp. 260–271. [Google Scholar]
- Li, N.; Gao, P.D.; Lu, Y.Q.; Li, A.; Yu, W.H. A New Adaptive Mesh Simplification Method Using Vertex Clustering with Topology-and-Detail Preserving. In Proceedings of the International Symposium on Information Science & Engineering, Shanghai, China, 20–22 December 2008; pp. 150–153. [Google Scholar]
- Chen, J.; Li, M.; Li, J. An improved texture-related vertex clustering algorithm for model simplification. Comput. Geosci. 2015, 83, 37–45. [Google Scholar] [CrossRef]
- Abdul-Rahman, H.S.; Jiang, X.J.; Scott, P.J. Freeform surface filtering using the lifting wavelet transform. Precis. Eng. 2013, 37, 187–202. [Google Scholar] [CrossRef] [Green Version]
- Cioaca, T.; Dumitrescu, B.; Stupariu, M.S. Lazy wavelet simplification using scale-dependent dense geometric variability descriptors. J. Control Eng. Appl. Inform. 2017, 19, 15–26. [Google Scholar]
- Loop, C. Smooth Subdivision Surfaces Based on Triangles. Master’s Thesis, Department of Mathematics, University of Utah, Salt Lake City, UT, USA, 1987. [Google Scholar]
- Li, G.; Ren, C.; Zhang, J.; Ma, W. Approximation of Loop subdivision surfaces for fast rendering. IEEE Trans. Vis. Comput. Graph. 2011, 17, 500–514. [Google Scholar]
- Pan, Q.; Xu, G.; Xu, G.; Zhang, Y. Isogeometric analysis based on extended Loop’s subdivision. J. Comput. Phys. 2015, 299, 731–746. [Google Scholar] [CrossRef]
- Dyn, N.; Levine, D.; Gregory, J.A. A butterfly subdivision scheme for surface interpolation with tension control. ACM Trans. Graph. (TOG) 1990, 9, 160–169. [Google Scholar] [CrossRef]
- Husain, N.A.; Rahim, M.S.M.; Bade, A. Iterative process to improve simple adaptive subdivision surfaces method with Butterfly scheme. World Acad. Sci. Eng. Technol. 2011, 55, 622–626. [Google Scholar]
- Vlachos, A.; Peters, J.; Boyd, C.; Mitchell, J.L. Curved PN triangles. In Proceedings of the 2001 Symposium on Interactive 3D Graphics, Research Triangle Park, NC, USA, 19–21 March 2001; pp. 159–166. [Google Scholar]
- Schwarz, M.; Staginski, M.; Stamminger, M. GPU-based rendering of PN triangle meshes with adaptive tessellation. In Proceedings of Vision, Modeling, and Visualization; Akademische Verlagsgesellschaft Aka GmbH: Berlin, Germany, 2006; pp. 161–168. [Google Scholar]
- Zheng, X.; Xiong, H.; Gong, J.; Yue, L. A morphologically preserved multi-resolution TIN surface modeling and visualization method for virtual globes. ISPRS J. Photogramm. Remote Sens. 2017, 129, 41–54. [Google Scholar] [CrossRef]
- Chen, Q.; Liu, G.; Ma, X.; Mariethoz, G.; He, Z.; Tian, Y.; Weng, Z. Local curvature entropy-based 3D terrain representation using a comprehensive Quadtree. ISPRS J. Photogramm. Remote Sens. 2018, 139, 30–45. [Google Scholar] [CrossRef]
- Hoppe, H. Progressive Meshes. In Proceedings of the 23rd Annual Conference on Computer Graphics and Interactive Techniques, New Orleans, LA, USA, 4–9 August 1996; pp. 99–108. [Google Scholar]
- Shafae, M.; Pajarola, R. Dstrips: Dynamic triangle strips for real-time mesh simplification and rendering. In Proceedings of the 11th Pacific Conference on Computer Graphics and Applications, Canmore, AB, Canada, 8–10 October 2003; pp. 271–280. [Google Scholar]
- Maximo, A.; Velho, L.; Siqueira, M. Adaptive multi-chart and multiresolution mesh representation. Comput. Graph. 2014, 38, 332–340. [Google Scholar] [CrossRef]
- Strasser, M.; Schlunegger, F. Erosional processes, topographic length-scales and geomorphic evolution in arid climatic environments: The ‘Lluta collapse’, northern Chile. Int. J. Earth Sci. 2005, 94, 433–446. [Google Scholar] [CrossRef]
- Schilling, A.; Basanow, J.; Zipf, A. Vector based Mapping of Polygons on Irregular Terrain Meshes for Web 3D Map Services. In Proceedings of the 3rd International Conference on Web Information Systems and Technologies (WEBIST), Barcelona, Spain, 3–6 March 2007; pp. 198–205. [Google Scholar]
- Hu, Y.; Zhu, J.; Li, W.; Zhang, Y.; Zhu, Q.; Qi, H.; Zhang, H.; Cao, Z.; Yang, W.; Zhang, P. Construction and optimization of three-dimensional disaster scenes within mobile virtual reality. ISPRS Int. J. Geo-Inf. 2018, 7, 215. [Google Scholar] [CrossRef]
- Djuricic, A.; Dorninger, P.; Nothegger, C.; Harzhauser, M.; Székely, B.; Rasztovits, S.; Mandic, O.; Molnár, G.; Pfeifer, N. High-resolution 3D surface modeling of a fossil oyster reef. Geosphere 2016, 12, 1457–1477. [Google Scholar] [CrossRef] [Green Version]
- Garland, M.; Heckbert, P.S. Surface simplification using quadric error metric. In Proceedings of the 24th Annual Conference on Computer Graphics and Interactive Techniques, Los Angeles, CA, USA, 3–8 August 1997; pp. 209–216. [Google Scholar]
- Li, Z.; Openshaw, S. Algorithms for automated line generalization based on a natural principle of objective generalization. Int. J. Geogr. Inf. Syst. 1992, 6, 373–389. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Member Variables | Type | describe |
|---|---|---|
| levelIndex | unsigned int | The corresponding scale |
| mmqeValue | float | The MMQE value for current scale |
| deletedTriInfo | vector<int> | The deleted triangles’ index array |
| deletedTriVexInfo | vector<pointIndex> | The deleted triangles’ three-vertex index array |
| replacedTriInfo | vector<int> | The replaced triangles’ index array |
| replacedTriVexOriInfo | vector<pointIndex> | The replaced triangles’ original three-vertex index array |
| replacedTriVexNewInfo | vector<pointIndex> | The replaced triangles’ new three-vertex index array |
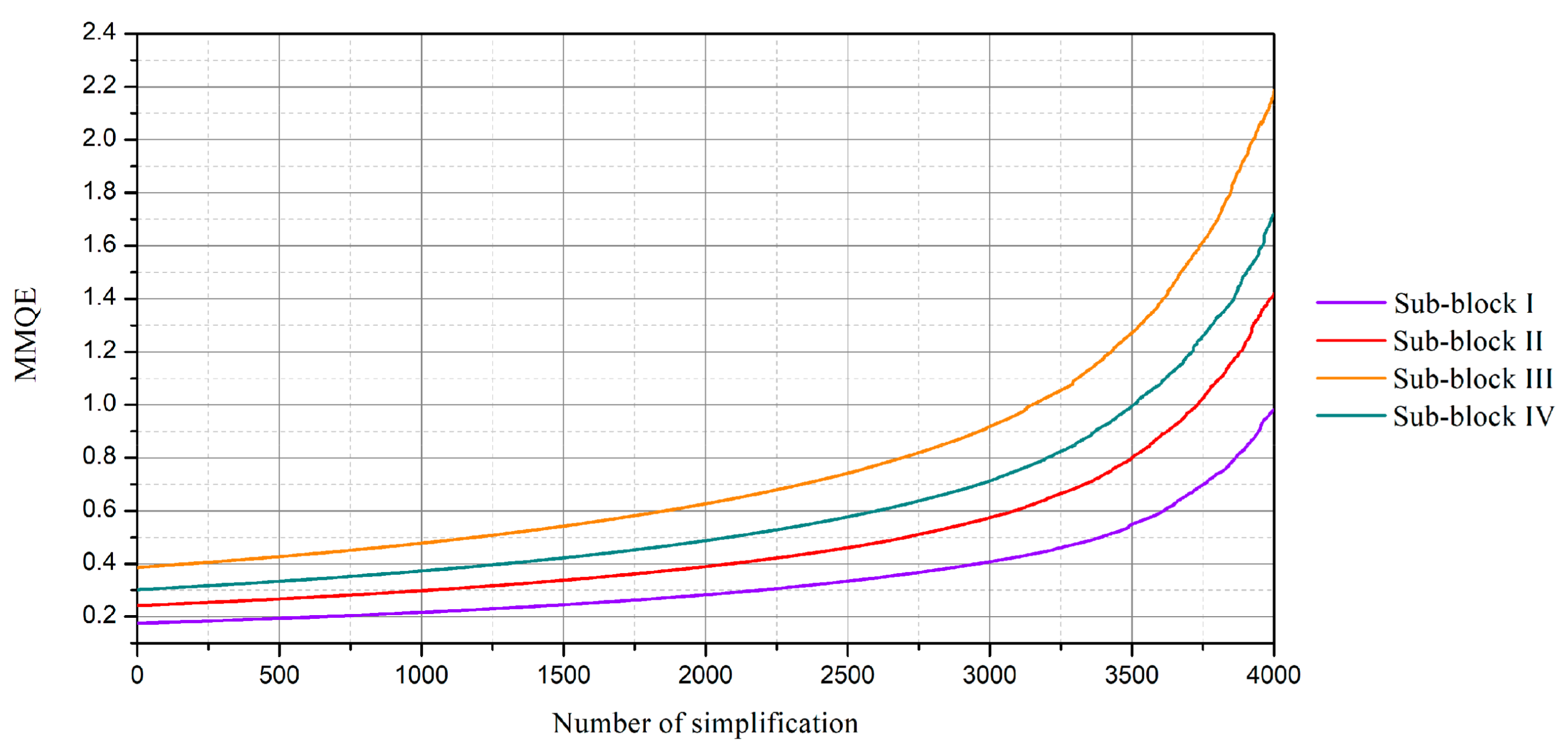
| State | Sub-Block | SVO Threshold | Visual Range (m) | Number of Triangles | Number of Simplification |
|---|---|---|---|---|---|
| T1 | I | 0.42 | 411.98 | 10337 | 22 |
| II | 0.60 | 649.79 | 6914 | 1735 | |
| III | 0.72 | 781.67 | 7571 | 1334 | |
| IV | 0.91 | 909.59 | 3815 | 3260 | |
| T2 | I | 0.50 | 499.32 | 7245 | 1568 |
| II | 0.67 | 731.01 | 5522 | 2431 | |
| III | 0.79 | 861.48 | 6177 | 2031 | |
| IV | 1.00 | 993.85 | 3297 | 3519 | |
| T3 | I | 0.60 | 590.65 | 5037 | 2672 |
| II | 0.77 | 817.25 | 4246 | 3069 | |
| III | 0.91 | 946.31 | 4641 | 2799 | |
| IV | 1.07 | 1082.39 | 2973 | 3681 | |
| T4 | I | 0.70 | 691.23 | 3693 | 3344 |
| II | 0.89 | 913.34 | 3398 | 3493 | |
| III | 1.01 | 1040.98 | 3849 | 3195 | |
| IV | 1.17 | 1180.36 | 2667 | 3834 | |
| T5 | I | 0.80 | 801.95 | 3037 | 3672 |
| II | 1.00 | 1020.11 | 2920 | 3732 | |
| III | 1.12 | 1146.33 | 3273 | 3483 | |
| IV | 1.30 | 1288.63 | 2359 | 3988 | |
| T6 | I | 0.97 | 971.57 | 2413 | 3984 |
| II | 1.15 | 1185.07 | 2484 | 3950 | |
| III | 1.31 | 1309.43 | 2621 | 3809 | |
| IV | 1.31 | 1455.19 | 2335 | 4000 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ai, B.; Wang, L.; Yang, F.; Bu, X.; Lin, Y.; Lv, G. Continuous-Scale 3D Terrain Visualization Based on a Detail-Increment Model. ISPRS Int. J. Geo-Inf. 2019, 8, 465. https://doi.org/10.3390/ijgi8100465
Ai B, Wang L, Yang F, Bu X, Lin Y, Lv G. Continuous-Scale 3D Terrain Visualization Based on a Detail-Increment Model. ISPRS International Journal of Geo-Information. 2019; 8(10):465. https://doi.org/10.3390/ijgi8100465
Chicago/Turabian StyleAi, Bo, Linyun Wang, Fanlin Yang, Xianhai Bu, Yaoyao Lin, and Guannan Lv. 2019. "Continuous-Scale 3D Terrain Visualization Based on a Detail-Increment Model" ISPRS International Journal of Geo-Information 8, no. 10: 465. https://doi.org/10.3390/ijgi8100465
APA StyleAi, B., Wang, L., Yang, F., Bu, X., Lin, Y., & Lv, G. (2019). Continuous-Scale 3D Terrain Visualization Based on a Detail-Increment Model. ISPRS International Journal of Geo-Information, 8(10), 465. https://doi.org/10.3390/ijgi8100465