Template-Based 3D Road Modeling for Generating Large-Scale Virtual Road Network Environment

Abstract
:
1. Introduction
2. Methodology
3. Data Pre-Processing
3.1. Topology Analysis
3.2. Road Centerline Resampling
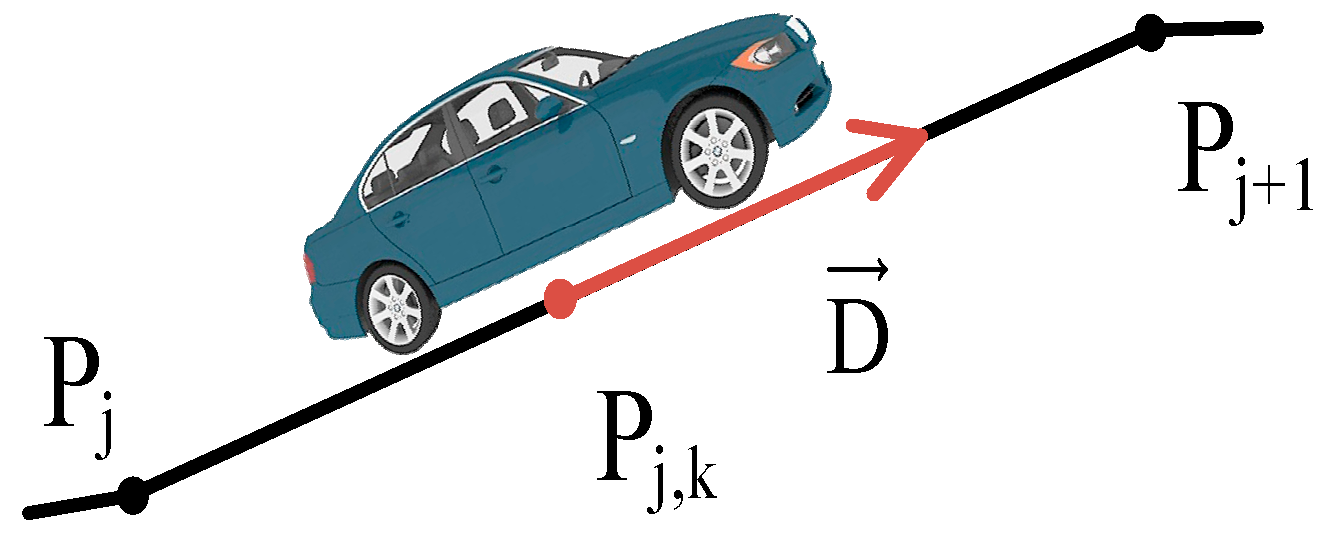
3.2.1. Straight Road Sampling
3.2.2. Corner Road Sampling
3.3. Road Segmentation and Organization
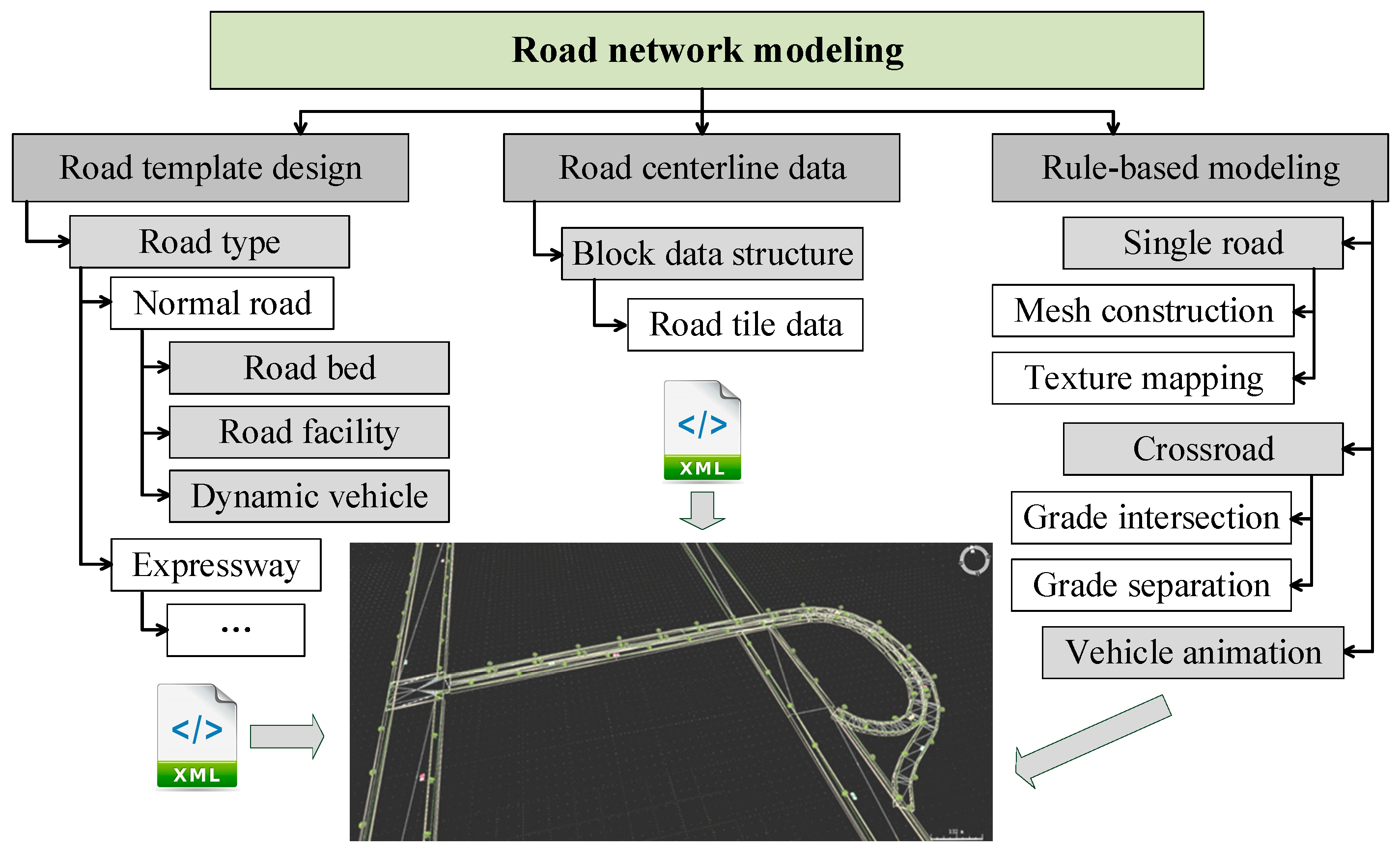
4. Road Network Modeling
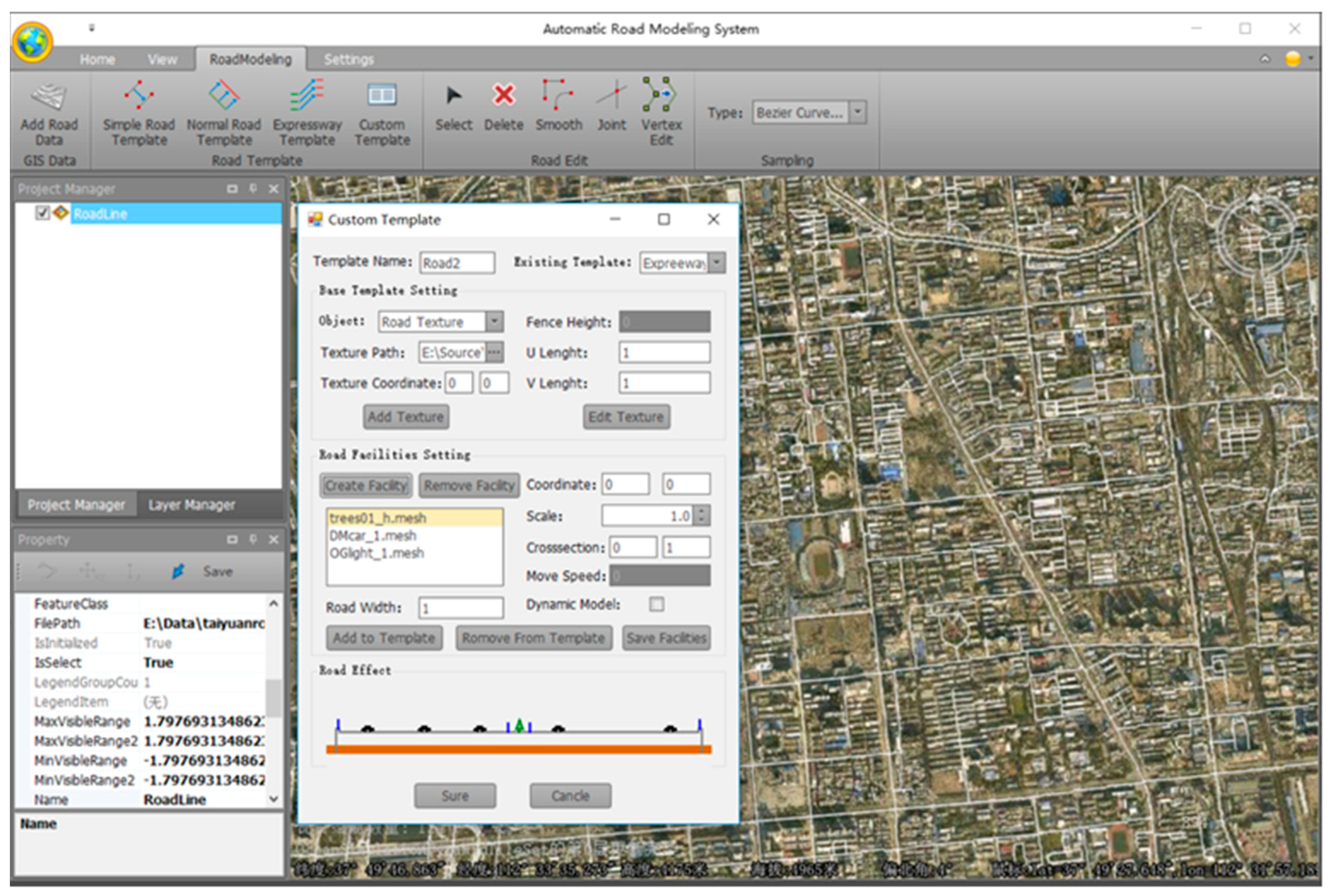
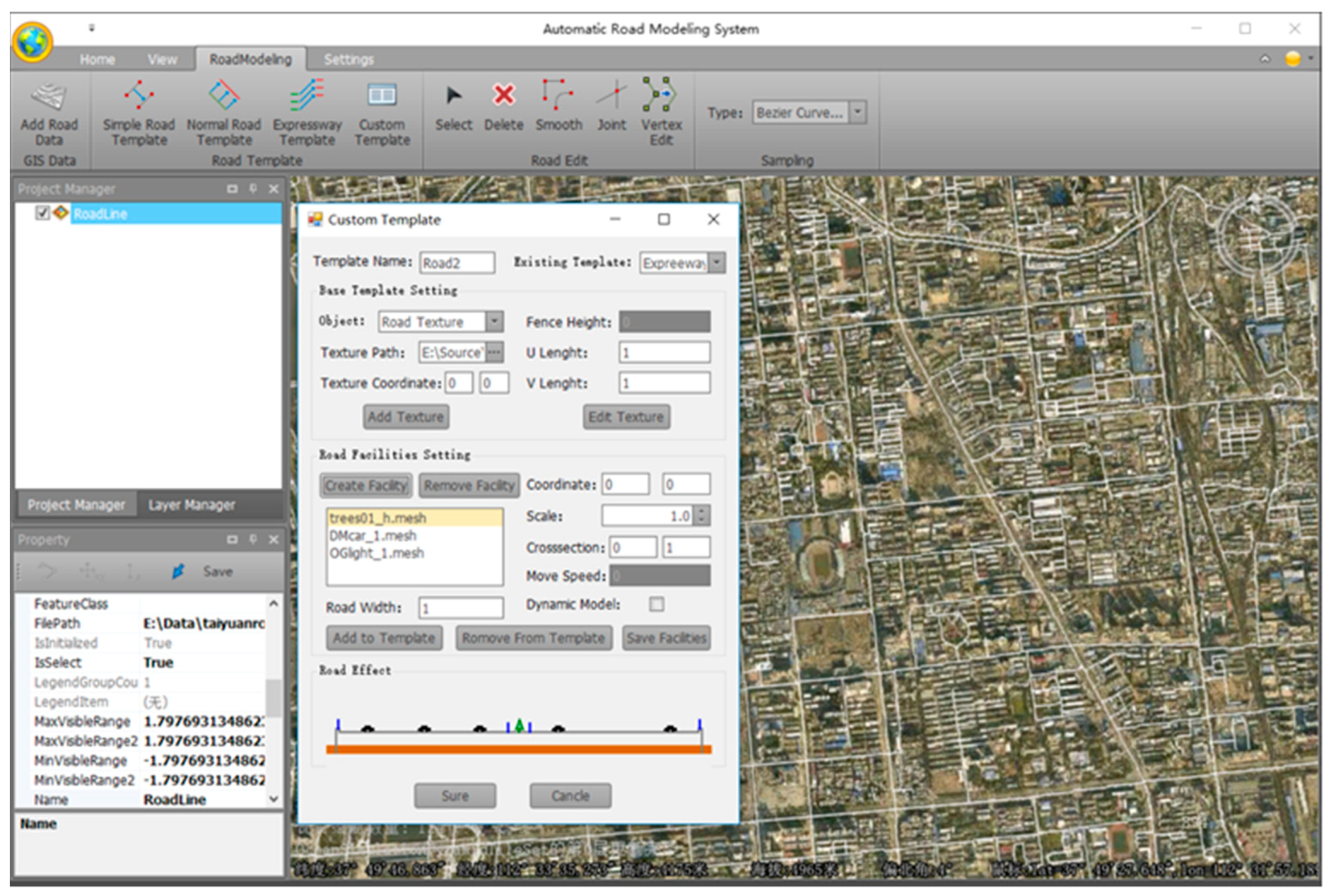
4.1. Road Template Design
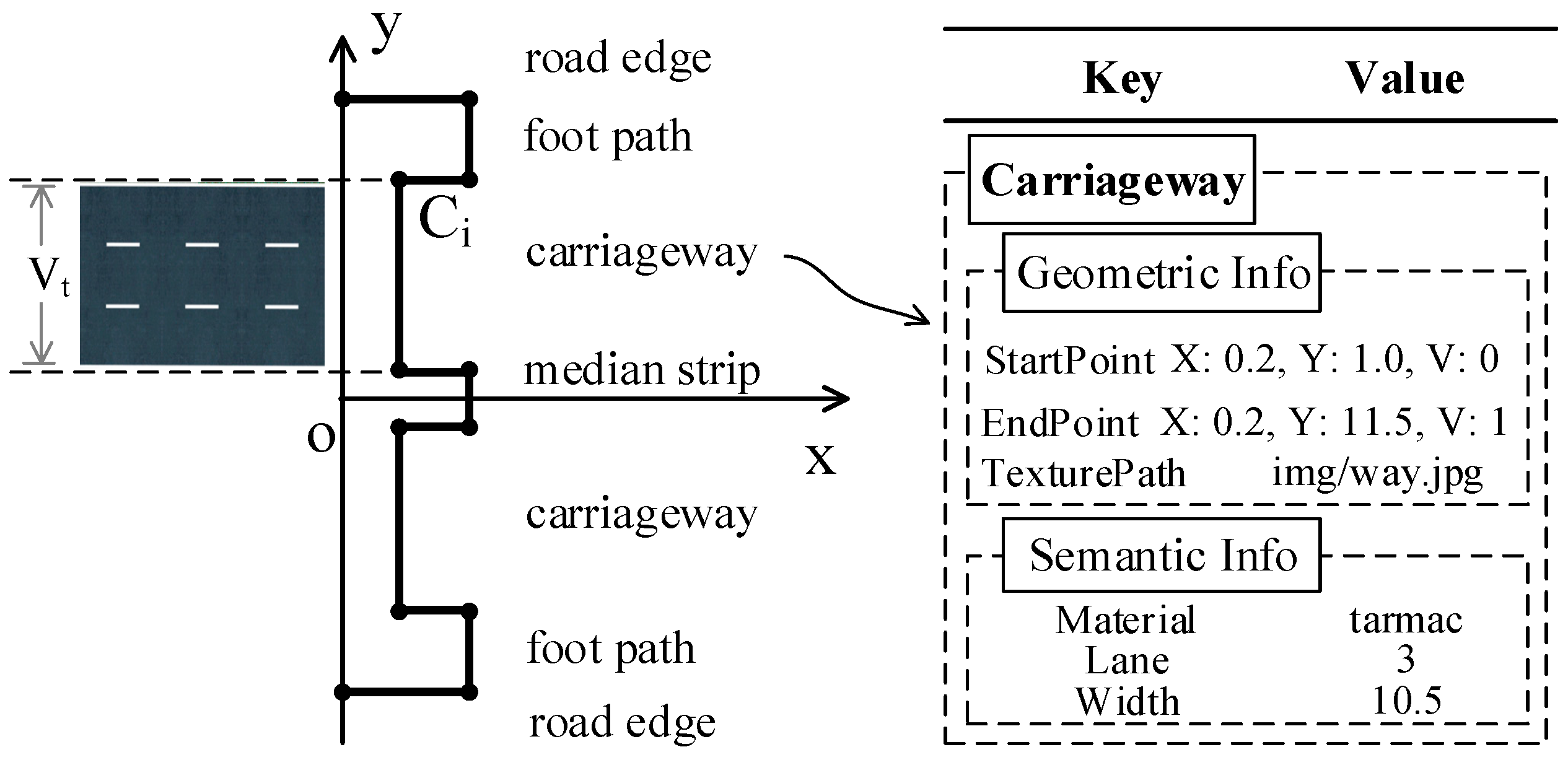
4.1.1. Road Type Template
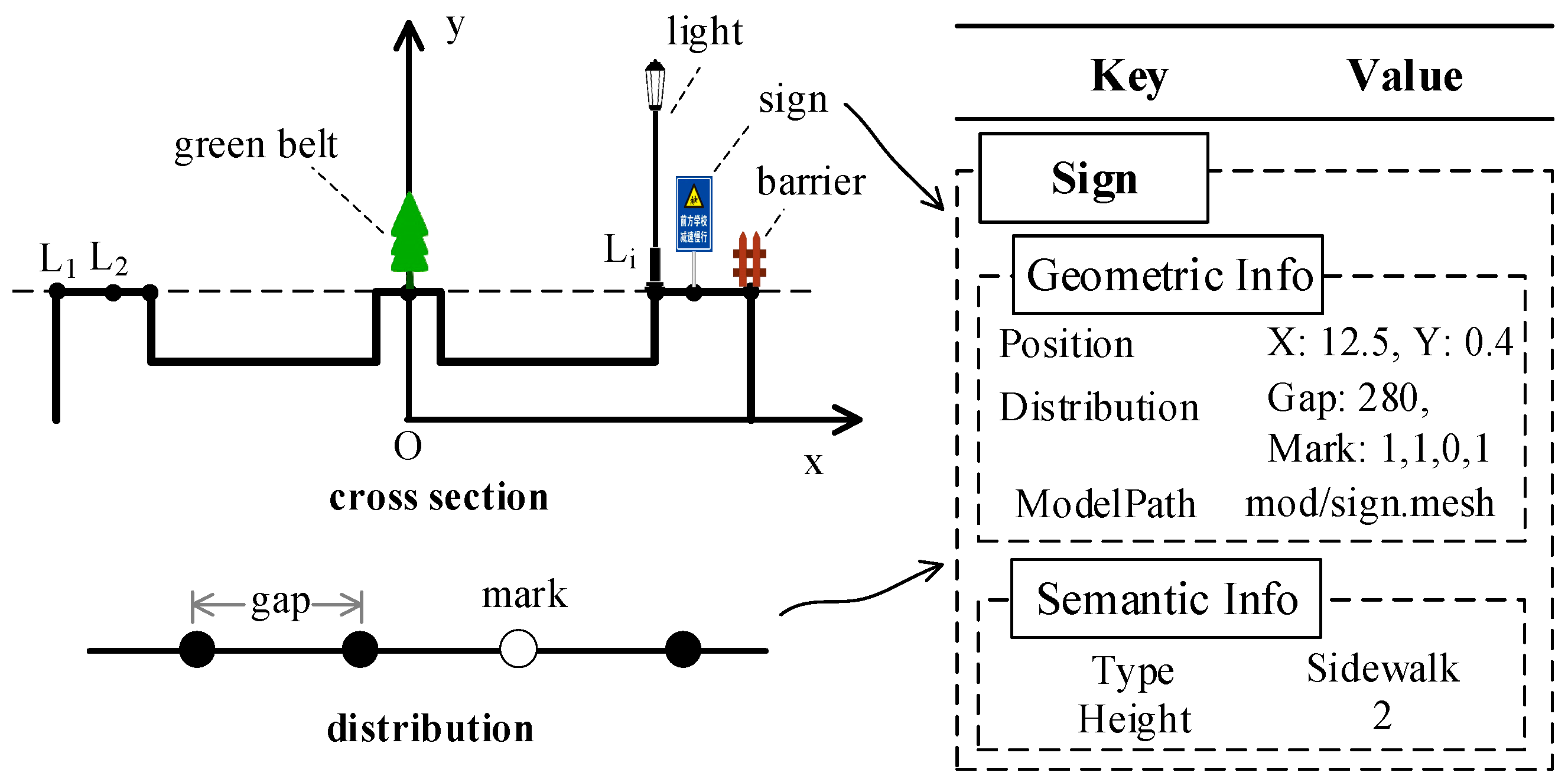
4.1.2. Roadbed Template
4.1.3. Road Facility Template
4.1.4. Moving Vehicle Template
4.2. Road Modeling Method
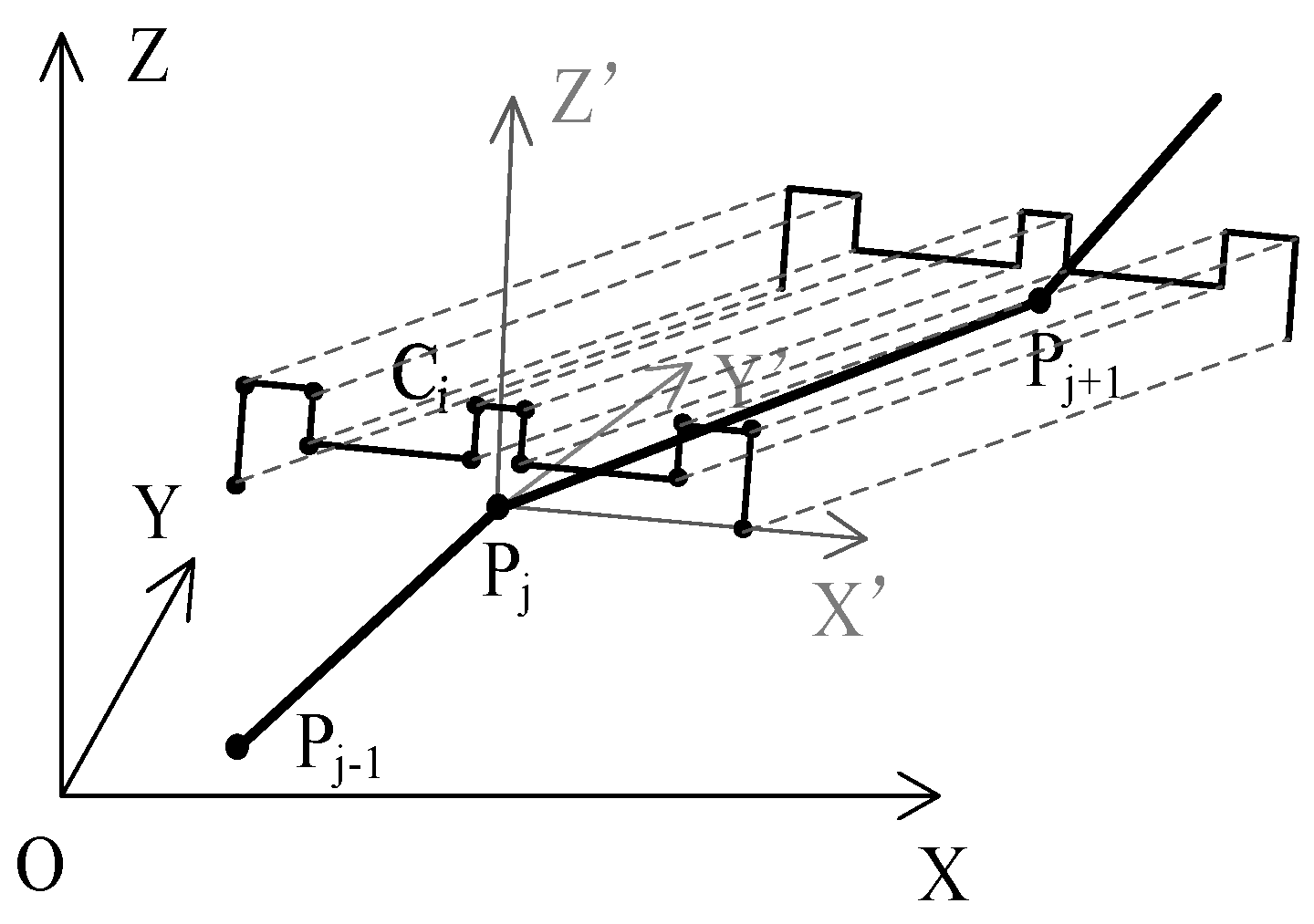
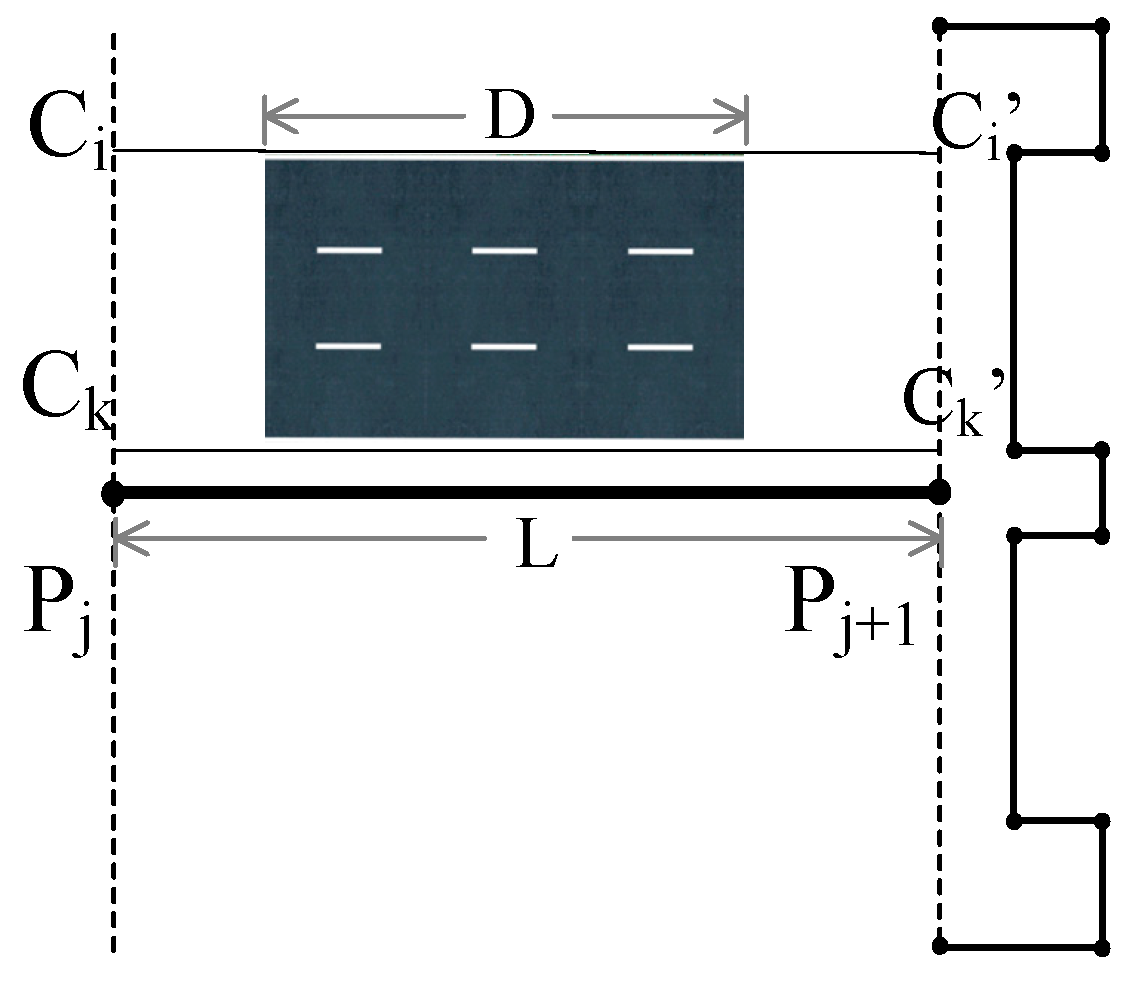
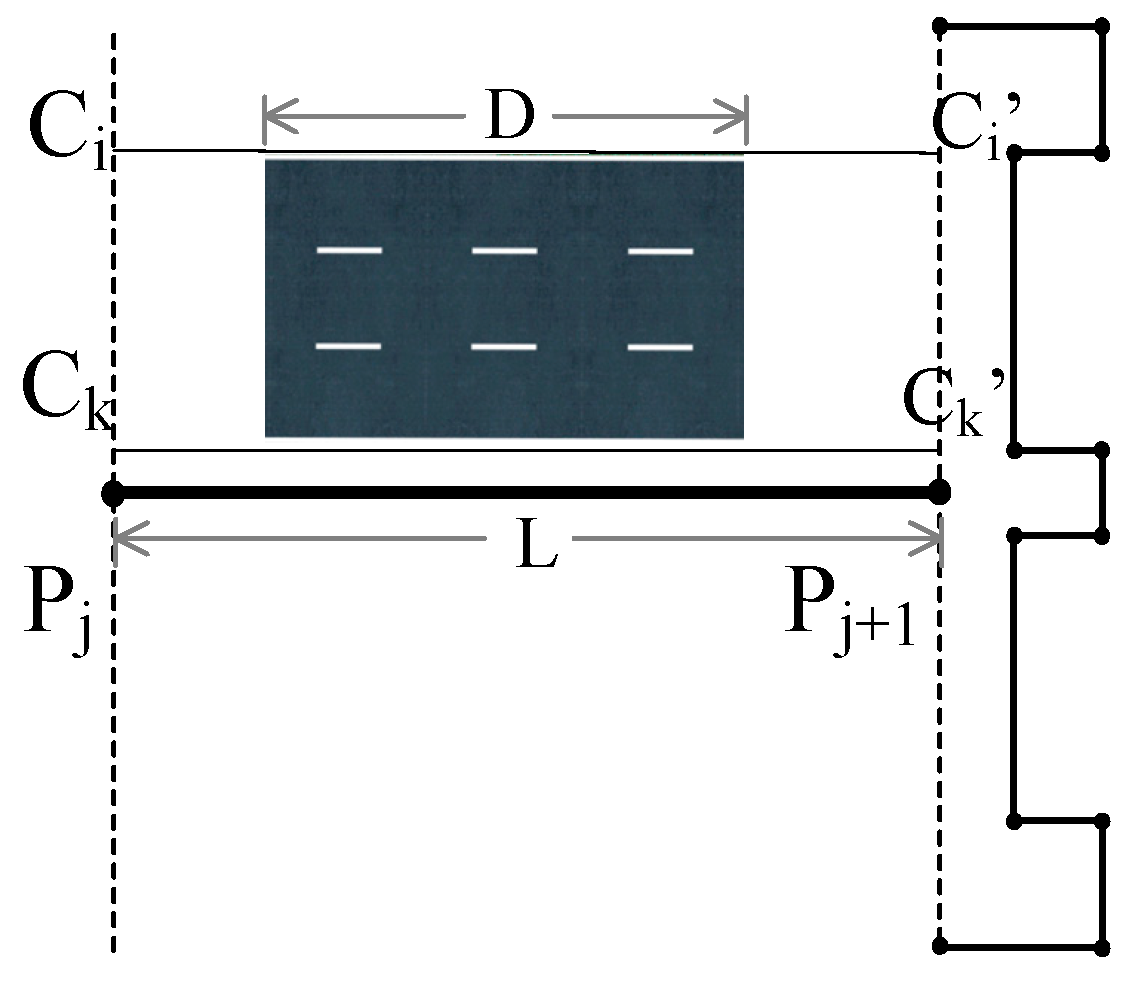
4.2.1. Single Road Modeling
Road Mesh Construction
Road Texture Mapping
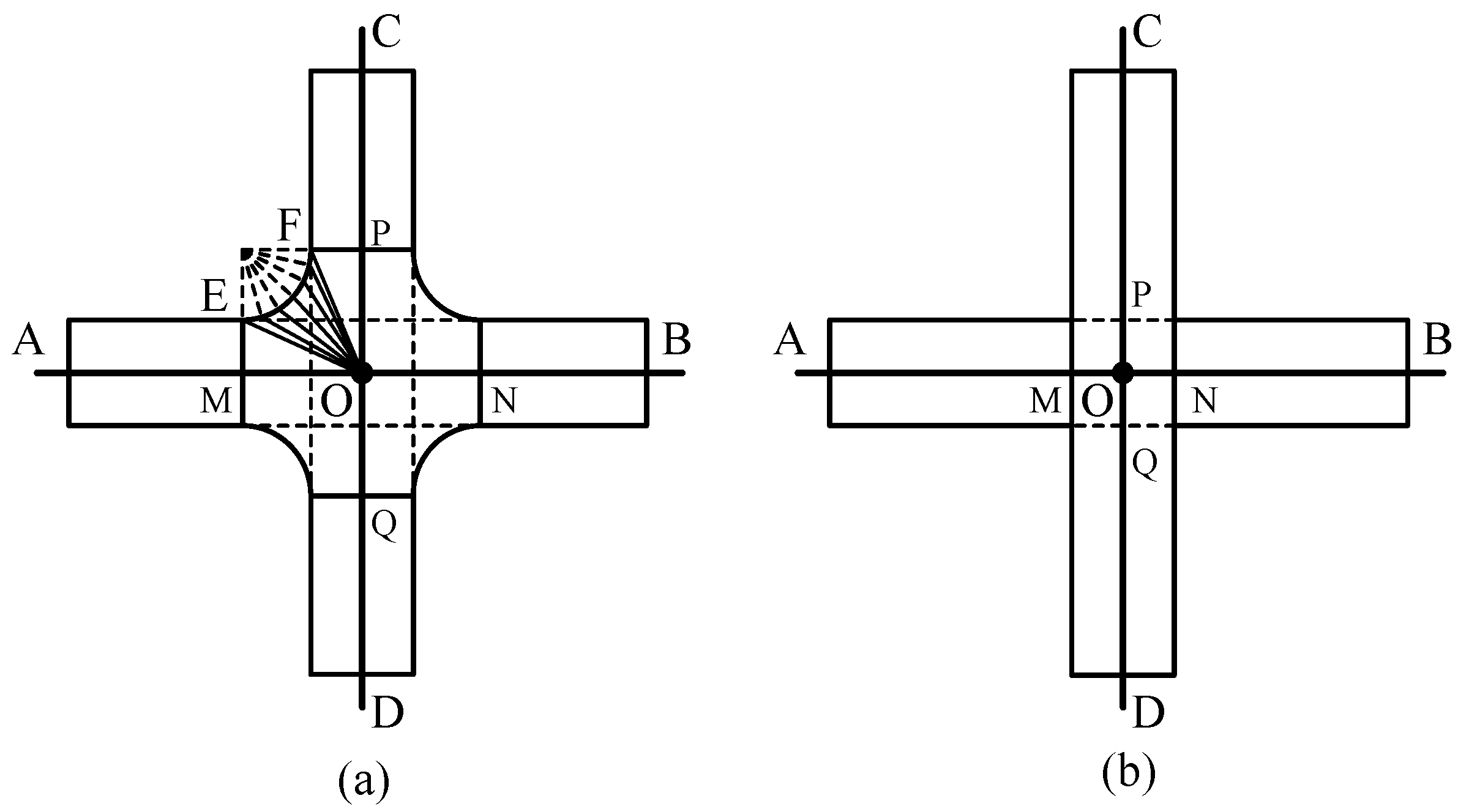
4.2.2. Intersection Modeling
At-grade Intersection Modeling
Grade Separated Intersection Modeling
4.2.3. Vehicle Animation Modeling
5. Experiment and Discussion
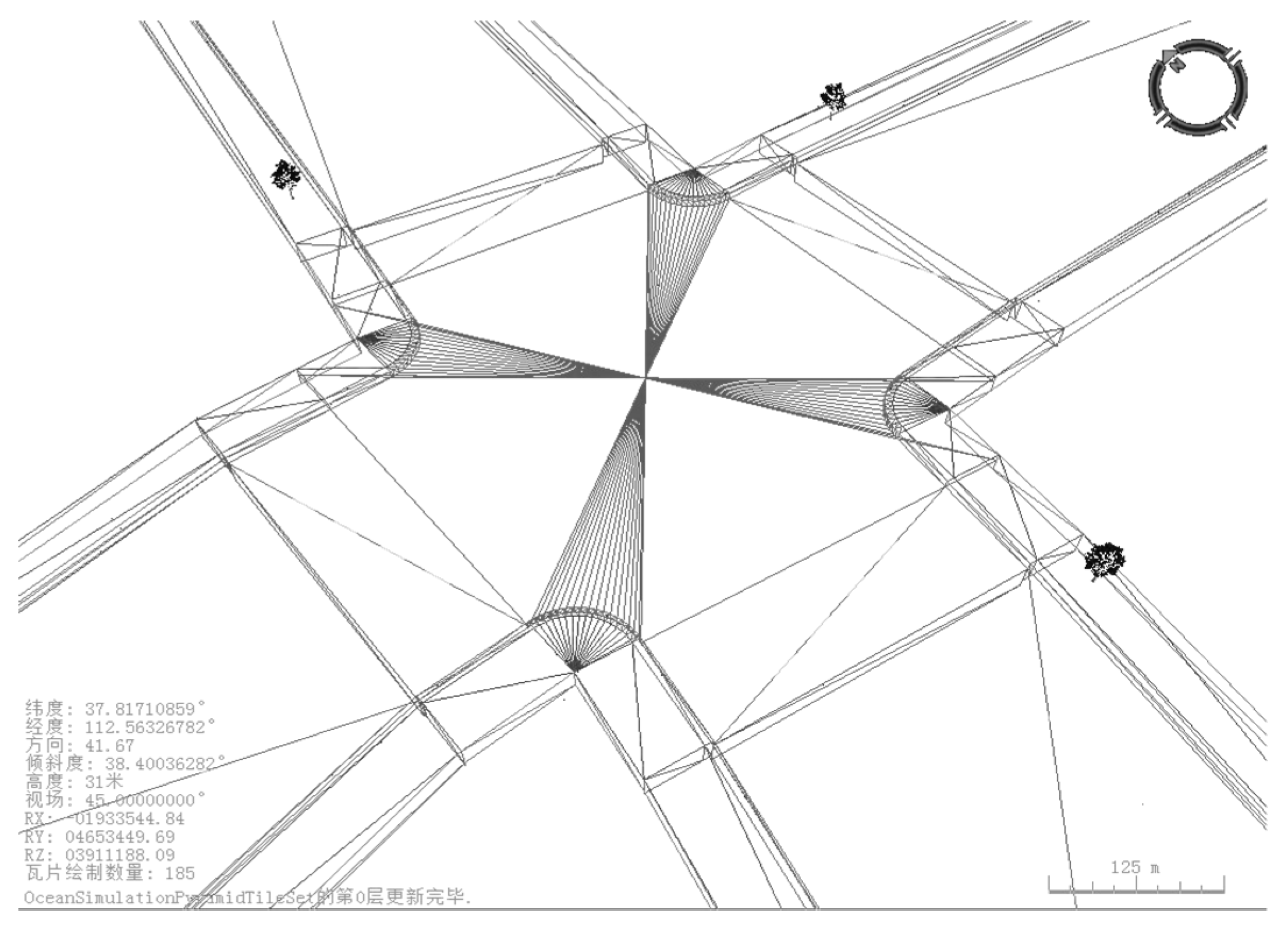
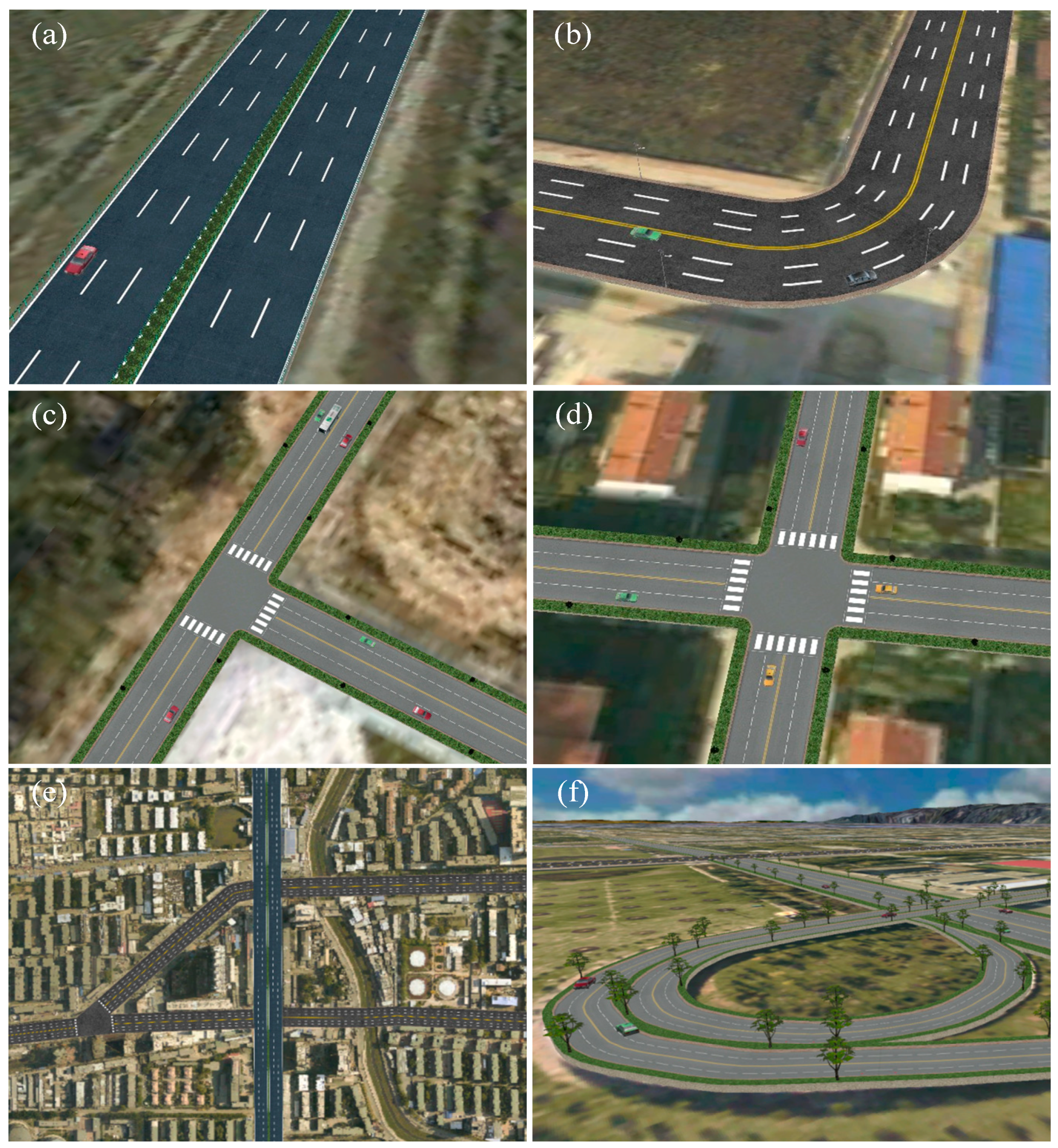
5.1. Experiment Result
5.2. Discussion
6. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Pojani, D.; Stead, D. Sustainable urban transport in the developing world: Beyond megacities. Sustainability 2015, 7, 7784–7805. [Google Scholar] [CrossRef]
- Memon, I. Distance and clustering-based energy-efficient pseudonyms changing strategy over road network. Int. J. Commun. Syst. 2018, 31, e3704. [Google Scholar] [CrossRef]
- Boughton, R.K.; Allen, B.L.; Tillman, E.A.; Wisely, S.M.; Engeman, R.M. Road hogs: Implications from GPS collared feral swine in pastureland habitat on the general utility of road-based observation techniques for assessing abundance. Ecol. Indic. 2019, 99, 171–177. [Google Scholar] [CrossRef]
- Biljecki, F.; Stoter, J.; Ledoux, H.; Zlatanova, S.; Çöltekin, A. Applications of 3D city models: State of the art review. ISPRS Int. J. Geo Inf. 2015, 4, 2842–2889. [Google Scholar] [CrossRef]
- Borrmann, A.; Kolbe, T.H.; Donaubauer, A.; Steuer, H.; Jubierre, J.R.; Flurl, M. Multi-scale geometric-semantic modeling of shield tunnels for GIS and BIM applications. Comput. Aided Civ. Infrastruct. Eng. 2015, 30, 263–281. [Google Scholar] [CrossRef]
- Barazzetti, L.; Banfi, F. BIM and GIS: When parametric modeling meets geospatial data. In Proceedings of the ISPRS Workshop on Geospatial Solutions for Structural Design, Construction and Maintenance in Training Civil Engineers and Architects, Kyiv, Ukraine, 4–6 December 2017. [Google Scholar]
- Segerström, O. Automating 3D Graphics Generation Using GIS Data-Terrain and Road Reproduction. Master’s Thesis, Umea University, Umeå, Sweden, 2015. [Google Scholar]
- Wang, J.; Papelis, Y.; Shen, Y.; Unal, O.; Cetin, M. High-Fidelity Roadway Modeling and Simulation. In Proceedings of the MODSIM World Conference & Expo, Virginia Beach, VA, USA, 14–16 October 2009. [Google Scholar]
- Chen, G.; Esch, G.; Wonka, P.; Müller, P.; Zhang, E. Interactive procedural street modeling. In Proceedings of the ACM Transactions on Graphics (TOG), Los Angeles, CA, USA, 11–15 August 2008. [Google Scholar]
- Parish, Y.I.; Müller, P. Procedural modeling of cities. In Proceedings of the 28th Annual Conference on Computer Graphics and Interactive Techniques, Los Angeles, CA, USA, 12–17 August 2001. [Google Scholar]
- Zhang, H.; Zhu, J.; Xu, Z.; Hu, Y.; Wang, J.; Yin, L.; Liu, M.; Gong, J. A rule-based parametric modeling method of generating virtual environments for coupled systems in high-speed trains. Comput. Environ. Urban Syst. 2016, 56, 1–13. [Google Scholar] [CrossRef]
- McCrae, J.; Singh, K. Sketch-Based Path Design; Canadian Information Processing Society: Mississauga, ON, Canada, 2009. [Google Scholar]
- McCrae, J.; Singh, K. Sketching piecewise clothoid curves. Comput. Graph. 2009, 33, 452–461. [Google Scholar] [CrossRef]
- Galin, E.; Peytavie, A.; Maréchal, N.; Guérin, E. Procedural generation of roads. Comput. Graph. Forum 2010, 29, 429–438. [Google Scholar] [CrossRef]
- Galin, E.; Peytavie, A.; Guérin, E.; Beneš, B. Authoring hierarchical road networks. Comput. Graph. Forum 2011, 30, 2021–2030. [Google Scholar] [CrossRef]
- Applegate, C.S.; Laycock, S.D.; Day, A. A sketch-based system for highway design with user-specified regions of influence. Comput. Graph. 2012, 36, 685–695. [Google Scholar] [CrossRef]
- Wilkie, D.; Sewall, J.; Lin, M.C. Transforming GIS data into functional road models for large-scale traffic simulation. IEEE Trans. Vis. Comput. Graph. 2012, 18, 890–901. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Lawson, G.; Shen, Y. Automatic high-fidelity 3D road network modeling based on 2D GIS data. Adv. Eng. Softw. 2014, 76, 86–98. [Google Scholar] [CrossRef]
- Nguyen, H.H.; Desbenoit, B.; Daniel, M. Realistic urban road network modelling from GIS data. In Proceedings of the Eurographics Workshop on Urban Data Modelling and Visualisation, Belgium, Germany, 28–30 May 1996. [Google Scholar]
- Cura, R.; Perret, J.; Paparoditis, N. StreetGen: In base city scale procedural generation of streets: Road network, road surface and street objects. arXiv 2018, arXiv:1801.05741. [Google Scholar]
- Zhang, H.; Zhu, J.; Zhu, Q.; Qi, H.; Wang, C.; Han, Z.; Hu, Y.; Ning, X. A template-based knowledge reuse method for generating multitype 3D railway scenes. Int. J. Digit. Earth 2018, 11, 179–194. [Google Scholar] [CrossRef]
- Wu, Z.; Wang, N.; Shao, J.; Deng, G. GPU ray casting method for visualizing 3D pipelines in a virtual globe. Int. J. Digit. Earth 2019, 12, 428–441. [Google Scholar] [CrossRef]
- Li, M.; Mao, S.; Wang, H.; Lu, B. 3D dynamic modeling and interactive query of underground roadway. In Proceedings of the Geoinformatics 2011—The 19th International Conference on Geoinformatics, Shanghai, China, 24–26 June 2011. [Google Scholar]
- Jakkula, S.; Shen, Y.; Sokolowski, J. Extraction of Road Network Topology for Transportation and GIS Applications. In Proceedings of the MODSIM World Conference & Expo, Virginia Beach, VA, USA, 14–16 October 2009. [Google Scholar]
- Chen, G.; Li, L. An optimized algorithm for lossy compression of real-time data. In Proceedings of the 2010 IEEE International Conference on Intelligent Computing and Intelligent Systems, Xiamen, China, 29–31 October 2010. [Google Scholar]
- Harvey, B.R. Transformation of 3D co-ordinates. Aust. Surv. 1986, 33, 105–125. [Google Scholar] [CrossRef]
- Zhang, X.; Yue, P.; Chen, Y.; Hu, L. An efficient dynamic volume rendering for large-scale meteorological data in a virtual globe. Comput. Geosci. 2019, 126, 1–8. [Google Scholar] [CrossRef]
- Sun, J.; Yu, X.; Baciu, G.; Green, M. Template-based generation of road networks for virtual city modeling. In Proceedings of the ACM Symposium on Virtual Reality Software and Technology, Tokyo, Japan, 28 November–1 December 2018. [Google Scholar]
- Joe, B. Construction of three-dimensional Delaunay triangulations using local transformations. Comput. Aided Geom. Des. 1991, 8, 123–142. [Google Scholar] [CrossRef]
- Weinhaus, F.M.; Devarajan, V. Texture mapping 3D models of real-world scenes. ACM Comput. Surv. 1997, 29, 325–365. [Google Scholar] [CrossRef]
- Bell, D.G.; Kuehnel, F.; Maxwell, C.; Kim, R.; Kasraie, K.; Gaskins, T.; Hogan, P.; Coughlan, J. NASA World Wind: Opensource GIS for mission operations. In Proceedings of the 2007 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2007. [Google Scholar]
- Boucher, C.; Noyer, J.-C. A general framework for 3-D parameters estimation of roads using GPS, OSM and DEM data. Sensors 2018, 18, 41. [Google Scholar] [CrossRef]
- Yang, X.; Tang, L.; Niu, L.; Zhang, X.; Li, Q. Generating lane-based intersection maps from crowdsourcing big trace data. Transp. Res. Part C Emerg. Technol. 2018, 89, 168–187. [Google Scholar] [CrossRef]
- Qiang, S.; Xu, L.; Qiang, L.; WAN, H.-H. 3D Rapid Modeling and Key Technology Analysis of Mountain Tunnel. DEStech Trans. Comput. Sci. Eng. 2019. [Google Scholar] [CrossRef]
- Fuse, T.; Yokozawa, N. Development of a Change Detection Method with Low-Performance Point Cloud Data for Updating Three-Dimensional Road Maps. ISPRS Int. J. Geo-Inf. 2017, 6, 398. [Google Scholar] [CrossRef]
- Mobasheri, A.; Huang, H.; Degrossi, L.; Zipf, A. Enrichment of openstreetmap data completeness with sidewalk geometries using data mining techniques. Sensors 2018, 18, 509. [Google Scholar] [CrossRef] [PubMed]
- Hanssen, R. VRbanism: Assessing Virtual Reality as an Urban Design Tool; TUDelft: Delft, The Netherlands, 2017. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pyramid Level | Road Parts | Memory Amount | FPS |
|---|---|---|---|
| 16 | 79 | 761 MB | 32 |
| 17 | 44 | 632 MB | 43 |
| 18 | 27 | 558 MB | 50 |
| 19 | 14 | 487 MB | 54 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Zhong, M.; Liu, S.; Zheng, L.; Chen, Y. Template-Based 3D Road Modeling for Generating Large-Scale Virtual Road Network Environment. ISPRS Int. J. Geo-Inf. 2019, 8, 364. https://doi.org/10.3390/ijgi8090364
Zhang X, Zhong M, Liu S, Zheng L, Chen Y. Template-Based 3D Road Modeling for Generating Large-Scale Virtual Road Network Environment. ISPRS International Journal of Geo-Information. 2019; 8(9):364. https://doi.org/10.3390/ijgi8090364
Chicago/Turabian StyleZhang, Xuequan, Ming Zhong, Shaobo Liu, Luoheng Zheng, and Yumin Chen. 2019. "Template-Based 3D Road Modeling for Generating Large-Scale Virtual Road Network Environment" ISPRS International Journal of Geo-Information 8, no. 9: 364. https://doi.org/10.3390/ijgi8090364
APA StyleZhang, X., Zhong, M., Liu, S., Zheng, L., & Chen, Y. (2019). Template-Based 3D Road Modeling for Generating Large-Scale Virtual Road Network Environment. ISPRS International Journal of Geo-Information, 8(9), 364. https://doi.org/10.3390/ijgi8090364