Capacitated Refuge Assignment for Speedy and Reliable Evacuation


Abstract
1. Introduction
2. Related Work
2.1. Geographical Risk Analysis and Path Selection
2.2. Evacuation Guiding and Human Interactions
2.3. Refuge Assignment
2.4. Multi-Objective Mathematical Programming
3. Capacitated Refuge Assignment for Speedy and Reliable Evacuation
3.1. Preliminaries
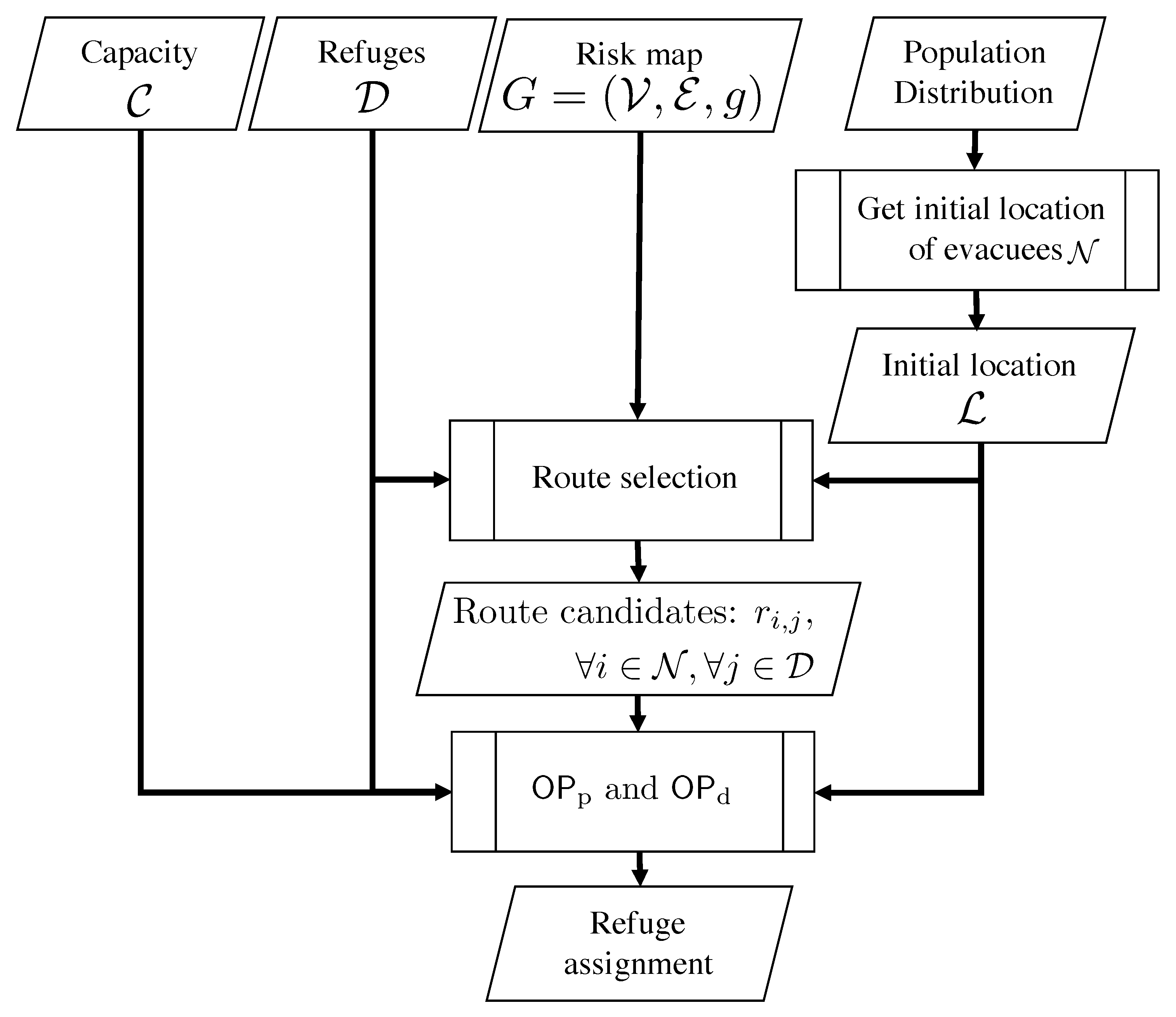
3.2. Overview of Proposed Refuge Assignment Scheme
3.3. Two-Step ILP Formulation for Refuge Assignment
3.3.1. First Step: Maximization of Average Route Reliability among Evacuees under Refuge Capacity Constraint
3.3.2. Second Step: Minimization of Average Route Length among Evacuees under Refuge Capacity Constraint and Average Route Reliability
3.4. Calculation of Speedy and Reliable Route Candidates between Evacuees and Their Possible Refuges
| Algorithm 1: Enumeration of at most shortest route candidates between evacuee i and refuge j under constraint on route length, , and route reliability, . | |
| Require: | |
| Ensure: | |
| 1: , | ▹ Initialization |
| 2: ←k | ▹ Calculation of the -shortest routes |
| 3: | ▹ Calculation of the length of the shortest route |
| 4: for do | |
| 5: if then | ▹ Check on the route length condition |
| 6: break | |
| 7: if then | ▹ Check on the route reliability condition |
| 8: | |
| 9: return | |
| Algorithm 2: Calculation of speedy and reliable route candidate between evacuee i and refuge j. | |
| Require: | |
| Ensure: | |
| 1: , | ▹ Initialization |
| 2: while do | |
| 3: | ▹ Calculation of the route candidates |
| 4: if then | |
| 5: return according to (9) | ▹ Calculation of the speedy and reliable route candidate |
| 6: | ▹ Update of |
4. Numerical Results
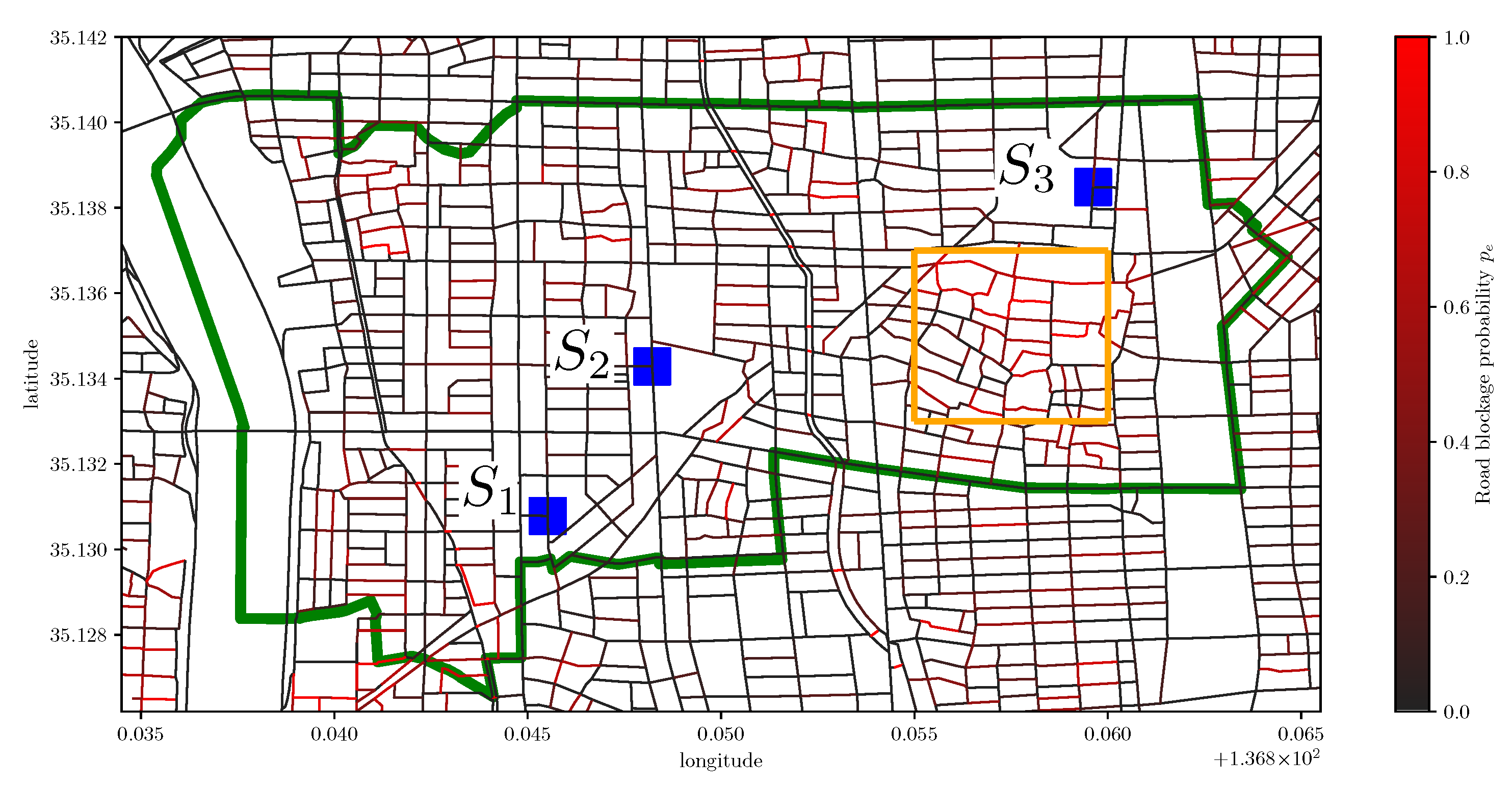
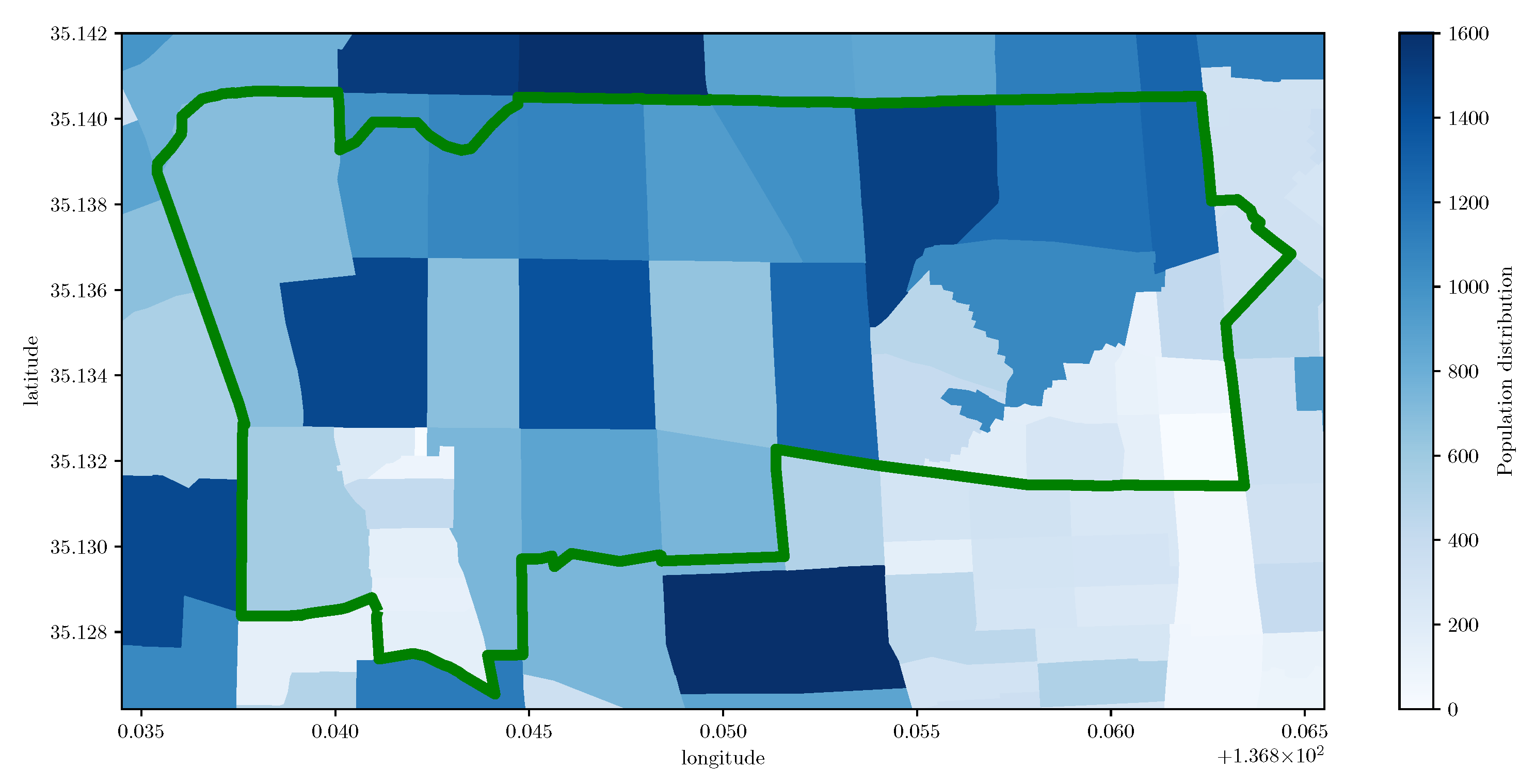
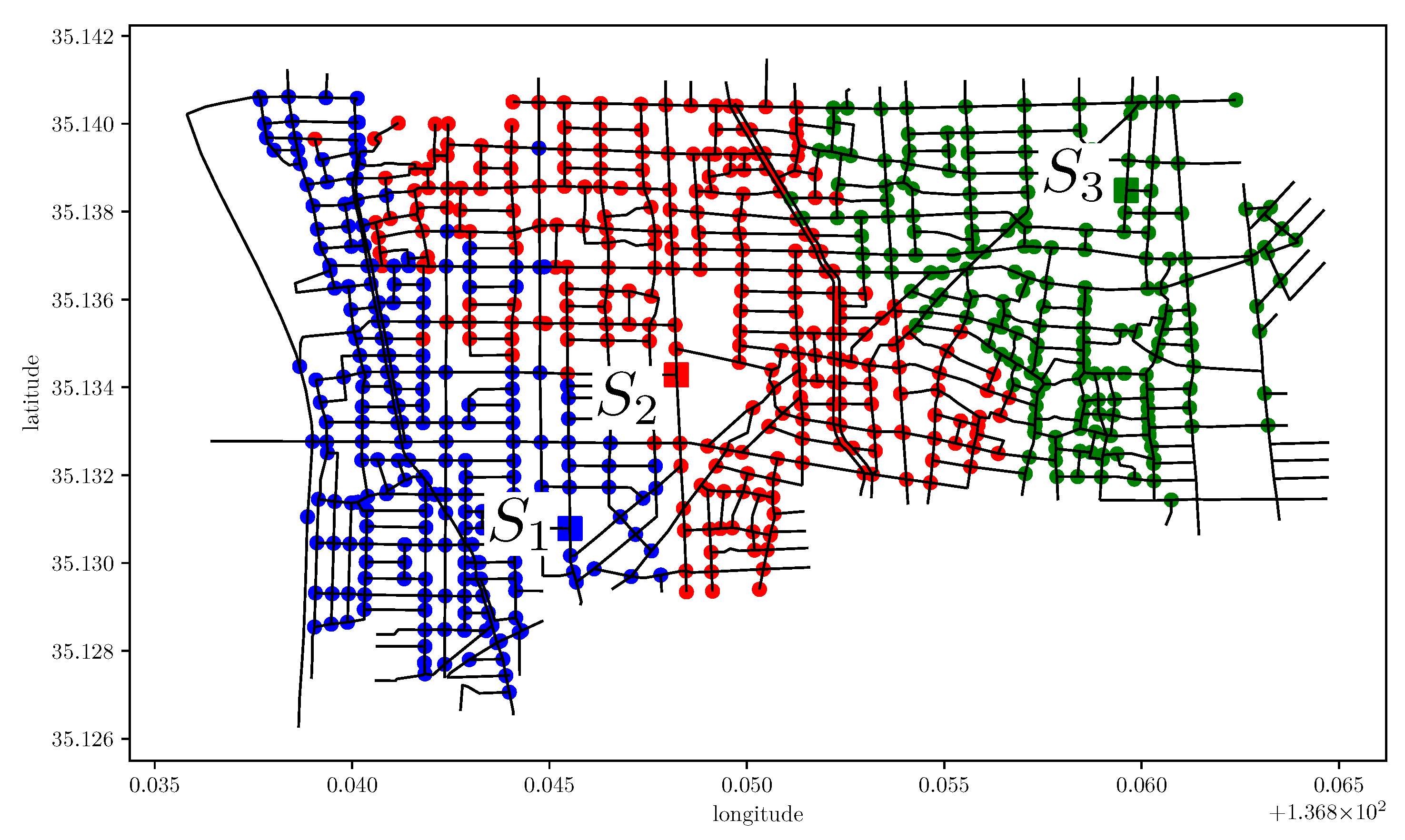
4.1. Evaluation Model
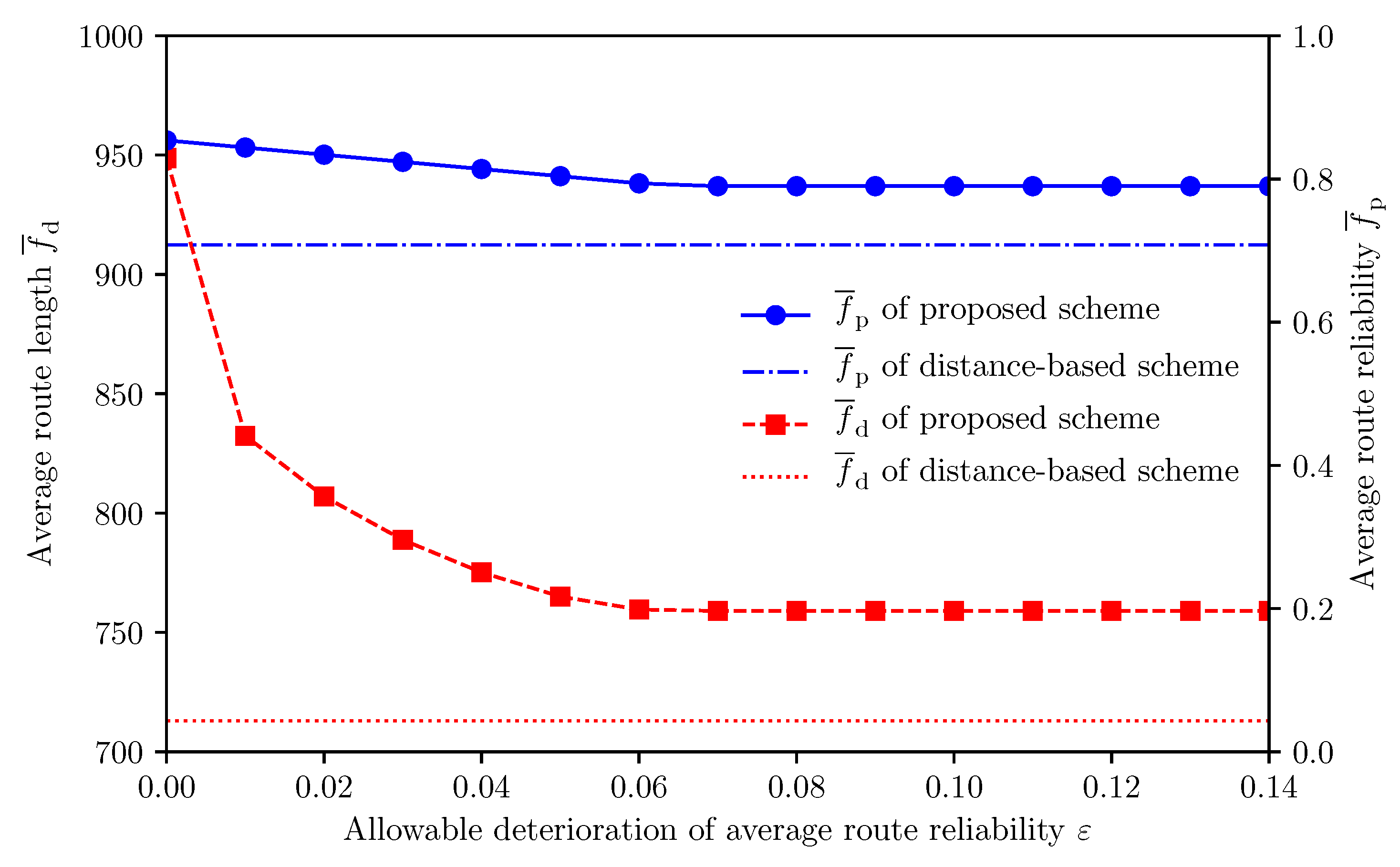
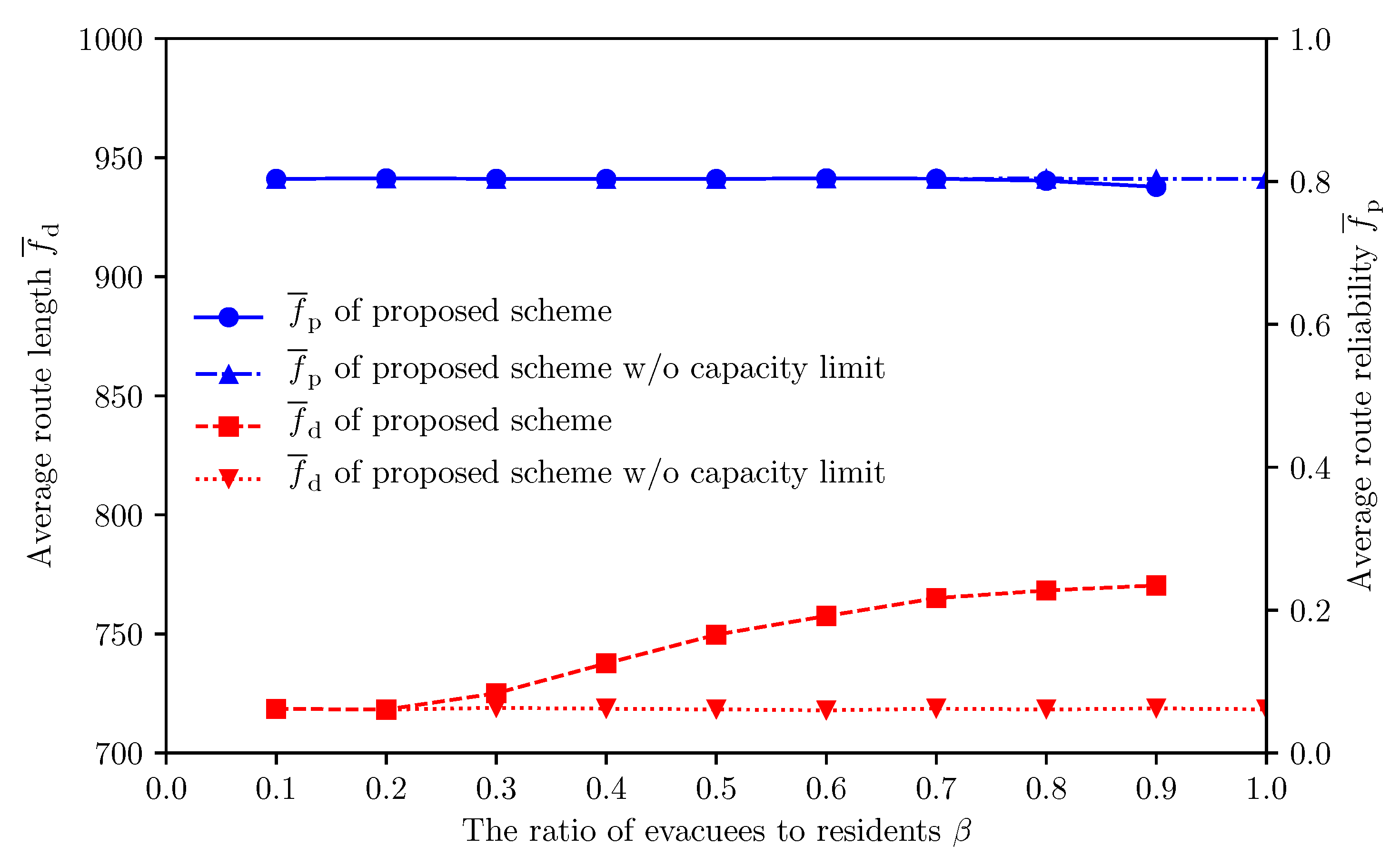
4.2. Analysis of Trade-Off between Speediness and Safety under Capacity Constraint
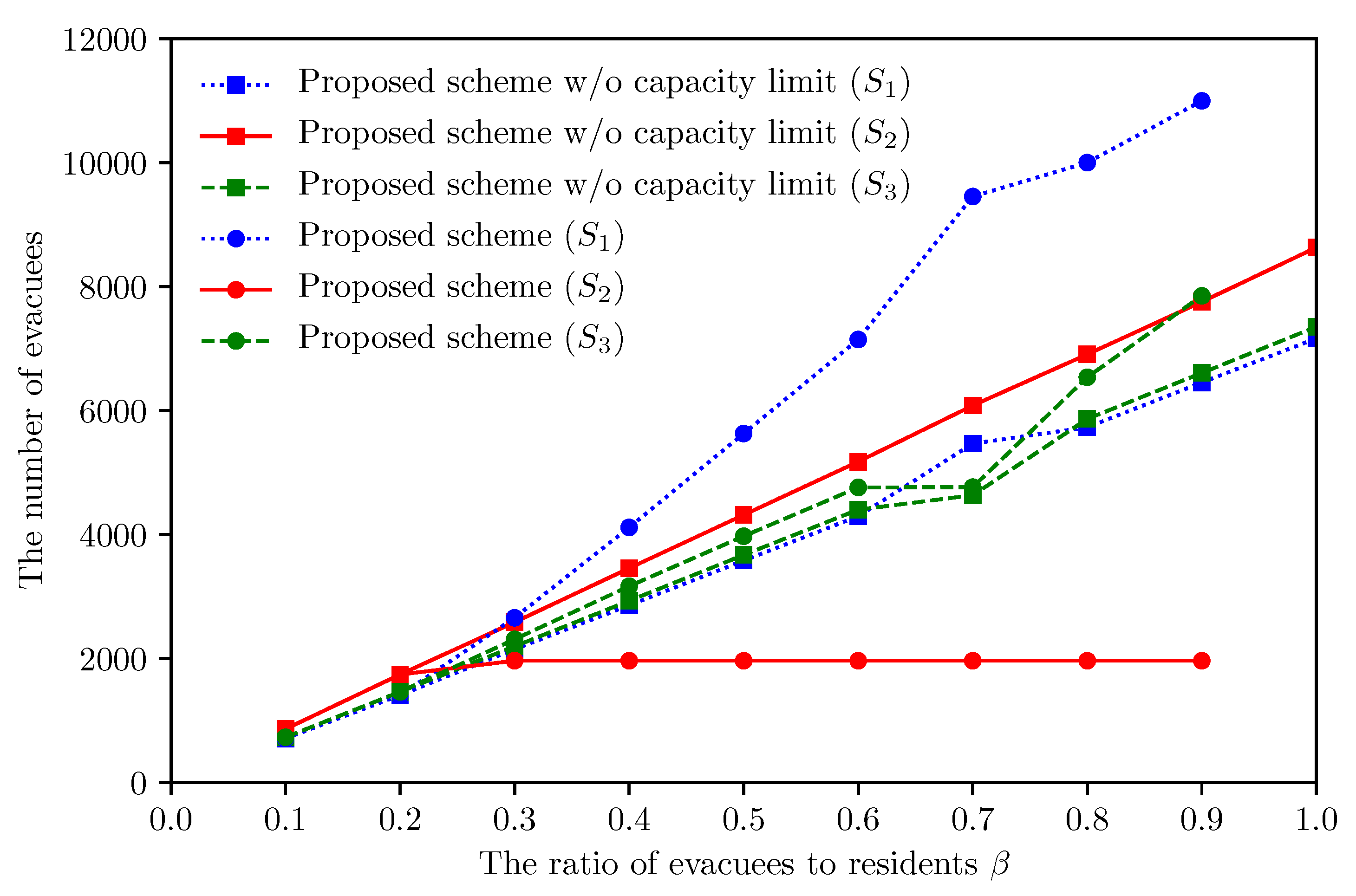
4.3. Impact of Capacity Limit on Speedy and Reliable Evacuation
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Road Blockage Probability
References
- Kongsomsaksakul, S.; Yang, C.; Chen, A. Shelter Location-Allocation Model for Flood Evacuation Planning. J. East. Asia Soc. Transp. Stud. 2005, 6, 4237–4252. [Google Scholar]
- Coutinho-Rodrigues, J.; Tralhão, L.; Alçada-Almeida, L. Solving a Location-Routing Problem with a Multiobjective Approach: The Design of Urban Evacuation Plans. J. Transp. Geogr. 2012, 22, 206–218. [Google Scholar] [CrossRef]
- Coutinho-Rodrigues, J.; Sousa, N.; Natividade-Jesus, E. Design of Evacuation Plans for Densely Urbanised City Centres. In Proceedings of the Institution of Civil Engineers-Municipal Engineer; Thomas Telford Ltd.: London, UK, 2015; Volume 169, pp. 160–172. [Google Scholar]
- Bayram, V.; Tansel, B.Ç.; Yaman, H. Compromising System and User Interests in Shelter Location and Evacuation Planning. Transp. Res. Part B Methodol. 2015, 72, 146–163. [Google Scholar] [CrossRef]
- Kılcı, F.; Kara, B.Y.; Bozkaya, B. Locating Temporary Shelter Areas after an Earthquake: A Case for Turkey. Eur. J. Oper. Res. 2015, 243, 323–332. [Google Scholar] [CrossRef]
- Xu, J.; Yin, X.; Chen, D.; An, J.; Nie, G. Multi-Criteria Location Model of Earthquake Evacuation Shelters to Aid in Urban Planning. Int. J. Disaster Risk Reduct. 2016, 20, 51–62. [Google Scholar] [CrossRef]
- Ng, M.; Park, J.; Waller, S.T. A Hybrid Bilevel Model for the Optimal Shelter Assignment in Emergency Evacuations. Comput. Aided Civ. Infrastruct. Eng. 2010, 25, 547–556. [Google Scholar] [CrossRef]
- Saadatseresht, M.; Mansourian, A.; Taleai, M. Evacuation Planning Using Multiobjective Evolutionary Optimization Approach. Eur. J. Oper. Res. 2009, 198, 305–314. [Google Scholar] [CrossRef]
- Bayram, V. Optimization Models for Large Scale Network Evacuation Planning and Management: A Literature Review. Surv. Oper. Res. Manag. Sci. 2016, 21, 63–84. [Google Scholar] [CrossRef]
- Lu, Q.; George, B.; Shekhar, S. Capacity Constrained Routing Algorithms for Evacuation Planning: A Summary of Results. In International Symposium on Spatial and Temporal Databases; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2005; pp. 291–307. [Google Scholar]
- Yusoff, M.; Ariffin, J.; Mohamed, A. Optimization Approaches for Macroscopic Emergency Evacuation Planning: A Survey. In Proceedings of the 2008 International Symposium on Information Technology, Kuala Lumpur, Malaysia, 26–28 August 2008; Volume 3, pp. 1–7. [Google Scholar]
- Zheng, Y.J.; Chen, S.Y.; Ling, H.F. Evolutionary Optimization for Disaster Relief Operations: A Survey. Appl. Soft Comput. 2015, 27, 553–566. [Google Scholar] [CrossRef]
- City of Nagoya. Earthquake-Resistance City Development Policy. 2015. Available online: http://www.city.nagoya.jp/jutakutoshi/cmsfiles/contents/0000002/2717/honpen.pdf (accessed on 25 April 2019). (In Japanese).
- Sekimoto, Y.; Shibasaki, R.; Kanasugi, H.; Usui, T.; Shimazaki, Y. PFlow: Reconstructing People Flow Recycling Large-Scale Social Survey Data. IEEE Pervasive Comput. 2011, 10, 27–35. [Google Scholar] [CrossRef]
- Larsson, D. Developing the Structure of a Fire Risk Index Method for Timber-Frame Multistorey Apartment Buildings; Student Report; Lund University: Lund, Sweden, 2000. [Google Scholar]
- Sasabe, M.; Fujii, K.; Kasahara, S. Road Network Risk Analysis Considering People Flow Under Ordinary and Evacuation Situations. Environ. Plan. B Urban Anal. City Sci. 2018, 47, 1–16. [Google Scholar] [CrossRef]
- Italian Technical Commission for Seismic Micro-Zoning. Handbook of Analysis of Emergency Conditions in Urban Scenarios (Manuale per L’analisi della Condizione Limite Dell’emergenza Dell’insediamento Urbano (CLE)); CNR, Dipartimento Sistemi di Produzione: Rome, Italy, 2014. (In Italian)
- Fujihara, A.; Miwa, H. Disaster Evacuation Guidance Using Opportunistic Communication: The Potential for Opportunity-Based Service. In Big Data and Internet of Things: A Roadmap for Smart Environments; Bessis, N., Dobre, C., Eds.; Springer International Publishing: Cham, Switzerland, 2014; Volume 546, pp. 425–446. [Google Scholar]
- Komatsu, N.; Sasabe, M.; Kawahara, J.; Kasahara, S. Automatic Evacuation Guiding Scheme Based on Implicit Interactions between Evacuees and Their Mobile Nodes. GeoInformatica 2018, 22, 127–141. [Google Scholar] [CrossRef]
- Hara, T.; Sasabe, M.; Kasahara, S. Geographical Risk Analysis Based Path Selection for Automatic, Speedy, and Reliable Evacuation Guiding Using Evacuees’ Mobile Devices. J. Ambient. Intell. Humaniz. Comput. 2019, 10, 2291–2300. [Google Scholar] [CrossRef]
- Galea, E.R.; H, X.; Lawrence, P.J. Experimental and Survey Studies on the Effectiveness of Dynamic Signage Systems. Fire Saf. Sci. 2014, 11, 1129–1143. [Google Scholar] [CrossRef]
- Xie, H.; Filippidis, L.; Galea, E.R.; Blackshields, D.; Lawrence, P.J. Experimental Analysis of the Effectiveness of Emergency Signage and Its Implementation in Evacuation Simulation. Fire Mater. 2012, 36, 367–382. [Google Scholar] [CrossRef]
- Zhu, R.; Lin, J.; Becerik-Gerber, B.; Li, N. Human-Building-Emergency Interactions and Their Impact on Emergency Response Performance: A Review of the State of the Art. Saf. Sci. 2020, 127, 104691. [Google Scholar] [CrossRef]
- ILOG. IBM ILOG CPLEX Optimizer. 2019. Available online: https://www.ibm.com/products/ilog-cplex-optimization-studio (accessed on 25 April 2019).
- MILT of Japan. National Land Numerical Information Download Service: School District Data. 2010. Available online: http://nlftp.mlit.go.jp/ksj/gml/datalist/KsjTmplt-A27-v2_1.html (accessed on 25 April 2019). (In Japanese)
- Aichi Prefecture. Aichi Prefecture Regional Disaster Prevention Plan Annex. 2017. Available online: http://www.pref.aichi.jp/bousai/boukei/list-fuzoku.htm (accessed on 25 April 2019). (In Japanese).
- MIC of Japan. e-Stat Portal Site of Official Statistics of Japan. 2008. Available online: https://www.e-stat.go.jp/en (accessed on 25 April 2019).
- Fruin, J. Designing for Pedestrians: A Level of Service Concept; Polytechnic University of Brooklyn: Brooklyn, NY, USA, 1970. [Google Scholar]
- Seyfried, A.; Steffen, B.; Lippert, T. Basics of Modelling the Pedestrian Flow. Phys. A Stat. Mech. Appl. 2006, 368, 232–238. [Google Scholar] [CrossRef]
- Kwan, M.P.; Ransberger, D.M. LiDAR Assisted Emergency Response: Detection of Transport Network Obstructions Caused by Major Disasters. Comput. Environ. Urban Syst. 2010, 34, 179–188. [Google Scholar] [CrossRef]
- Santarelli, S.; Bernardini, G.; Quagliarini, E. Earthquake Building Debris Estimation in Historic City Centres: From Real World Data to Experimental-Based Criteria. Int. J. Disaster Risk Reduct. 2018, 31, 281–291. [Google Scholar] [CrossRef]
- Santarelli, S.; Bernardini, G.; Quagliarini, E.; D’Orazio, M. New Indices for the Existing City-Centers Streets Network Reliability and Availability Assessment in Earthquake Emergency. Int. J. Archit. Herit. 2018, 12, 153–168. [Google Scholar] [CrossRef]
- Quagliarini, E.; Bernardini, G.; Santarelli, S.; Lucesoli, M. Evacuation Paths in Historic City Centres: A Holistic Methodology for Assessing their Seismic Risk. Int. J. Disaster Risk Reduct. 2018, 31, 698–710. [Google Scholar] [CrossRef]
- Bernardini, G.; Quagliarini, E.; D’Orazio, M. Towards Creating a Combined Database for Earthquake Pedestrians’ Evacuation Models. Saf. Sci. 2016, 82, 77–94. [Google Scholar] [CrossRef]
- Liu, H.; Xu, B.; Lu, D.; Zhang, G. A Path Planning Approach for Crowd Evacuation in Buildings Based on Improved Artificial Bee Colony Algorithm. Appl. Soft Comput. 2018, 68, 360–376. [Google Scholar] [CrossRef]
- Kasai, Y.; Sasabe, M.; Kasahara, S. Congestion-Aware Route Selection in Automatic Evacuation Guiding based on Cooperation Between Evacuees and Their Mobile Nodes. EURASIP J. Wirel. Commun. Netw. 2017, 2017, 164. [Google Scholar] [CrossRef][Green Version]
- Bernardini, G.; Santarelli, S.; Quagliarini, E.; D’Orazio, M. Dynamic Guidance Tool for a Safer Earthquake Pedestrian Evacuation in Urban Systems. Comput. Environ. Urban Syst. 2017, 65, 150–161. [Google Scholar] [CrossRef]
- Fall, K. A Delay-Tolerant Network Architecture for Challenged Internets. In Proceedings of the 2003 Conference on Applications, Technologies, Architectures, and Protocols for Computer Communications, Karlsruhe, Germany, 25–29 August 2003; pp. 27–34. [Google Scholar]
- Sugiman, T.; Misumi, J. Development of a New Evacuation Method for Emergencies: Control of Collective Behavior by Emergent Small Groups. J. Appl. Psychol. 1988, 73, 3–10. [Google Scholar] [CrossRef]
- Ehrgott, M. Multicriteria Optimization; Springer Science & Business Media: Berlin, Germany, 2005; Volume 491. [Google Scholar]
- Chankong, V.; Haimes, Y.Y. Multiobjective Decision Making: Theory and Methodology; Courier Dover Publications: Mineola, NY, USA, 2008. [Google Scholar]
- YV, Y.H.; Lasdon, L.S.; Da Wismer, D.A. On a Bicriterion Formulation of the Problems of Integrated System Identification and System Optimization. IEEE Trans. Syst. Man Cybern. 1971, SMC-1, 296–297. [Google Scholar] [CrossRef]
- Mavrotas, G. Effective Implementation of the ε-constraint Method in Multi-Objective Mathematical Programming Problems. Appl. Math. Comput. 2009, 213, 455–465. [Google Scholar] [CrossRef]
- Mavrotas, G.; Florios, K. An Improved Version of the Augmented ε-constraint Method (AUGMECON2) for Finding the Exact Pareto Set in Multi-Objective Integer Programming Problems. Appl. Math. Comput. 2013, 219, 9652–9669. [Google Scholar] [CrossRef]
- The Government of Japan. Disaster Countermeasures Basic Act. 1961. Available online: http://www.japaneselawtranslation.go.jp/law/detail_main?re=02&vm=&id=3092 (accessed on 25 April 2019).
- Ansari, R.I.; Chrysostomou, C.; Hassan, S.A.; Guizani, M.; Mumtaz, S.; Rodriguez, J.; Rodrigues, J.J.P.C. 5G D2D Networks: Techniques, Challenges, and Future Prospects. IEEE Syst. J. 2018, 12, 3970–3984. [Google Scholar] [CrossRef]
- Santos, R.; Mosse, D.; Znati, T.; Comfort, L. Design and Implementation of a Witness Unit for Opportunistic Routing in Tsunami Alert Scenarios. Saf. Sci. 2016, 90, 75–83. [Google Scholar] [CrossRef]
- Quddus, M.A.; Ochieng, W.Y.; Zhao, L.; Noland, R.B. A General Map Matching Algorithm for Transport Telematics Applications. GPS Solut. 2003, 7, 157–167. [Google Scholar] [CrossRef]
- Usman, F.; Murakami, K.; Wicaksono, A.D.; Setiawan, E. Application of Agent-Based Model Simulation for Tsunami Evacuation in Pacitan, Indonesia. MATEC Web Conf. 2017, 97, 01064. [Google Scholar] [CrossRef]
- Yen, J.Y. Finding the K Shortest Loopless Paths in a Network. Manag. Sci. 1971, 17, 712–716. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Definition |
|---|---|
| G | Directed graph of the road network |
| The set of vertices | |
| The set of edges | |
| Road blockage probability of road e | |
| The set of evacuees | |
| The set of initial locations of each evacuee i, | |
| The set of refuges | |
| The set of refuge capacity | |
| Decision variable | |
| Evacuee i’s route to refuge j | |
| The length of road e | |
| The reliability of route r | |
| The length of route r | |
| The optimal route reliability | |
| The constraint on the decrease of the route reliability |
| Scheme | Refuge Assignment | Route Selection |
|---|---|---|
| Distance-based scheme | without (8) | Shortest path selection |
| Proposed scheme | and | |
| Proposed scheme without capacity constraint | and without (6) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hara, T.; Sasabe, M.; Matsuda, T.; Kasahara, S. Capacitated Refuge Assignment for Speedy and Reliable Evacuation. ISPRS Int. J. Geo-Inf. 2020, 9, 442. https://doi.org/10.3390/ijgi9070442
Hara T, Sasabe M, Matsuda T, Kasahara S. Capacitated Refuge Assignment for Speedy and Reliable Evacuation. ISPRS International Journal of Geo-Information. 2020; 9(7):442. https://doi.org/10.3390/ijgi9070442
Chicago/Turabian StyleHara, Takanori, Masahiro Sasabe, Taiki Matsuda, and Shoji Kasahara. 2020. "Capacitated Refuge Assignment for Speedy and Reliable Evacuation" ISPRS International Journal of Geo-Information 9, no. 7: 442. https://doi.org/10.3390/ijgi9070442
APA StyleHara, T., Sasabe, M., Matsuda, T., & Kasahara, S. (2020). Capacitated Refuge Assignment for Speedy and Reliable Evacuation. ISPRS International Journal of Geo-Information, 9(7), 442. https://doi.org/10.3390/ijgi9070442