Comparing Fully Deep Convolutional Neural Networks for Land Cover Classification with High-Spatial-Resolution Gaofen-2 Images


 ,
,
Abstract
:1. Introduction
2. Materials and Methods
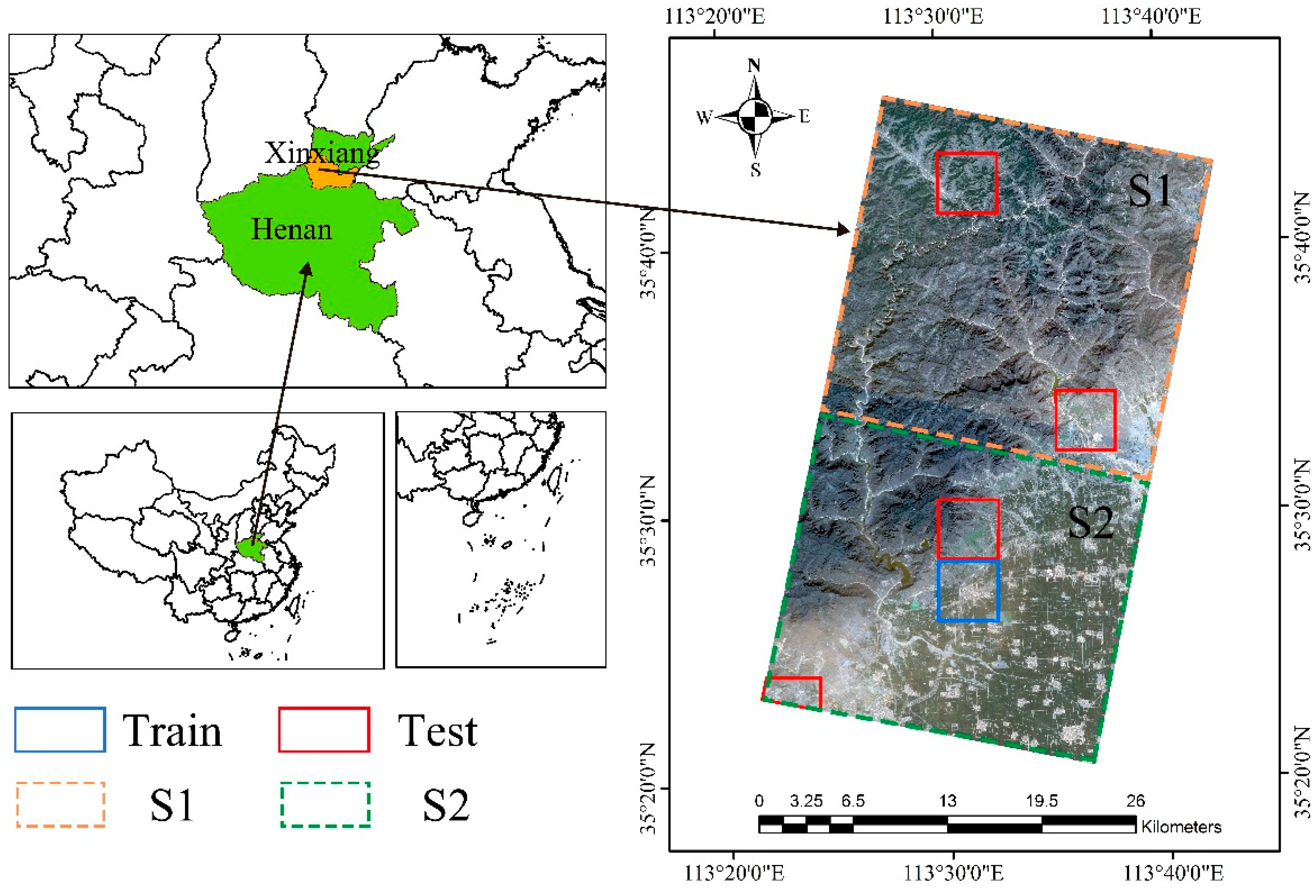
2.1. Study Area and Data
2.2. Land Cover Classes
2.3. Architecture of FCNs
2.4. Evaluation Metrics
3. Results
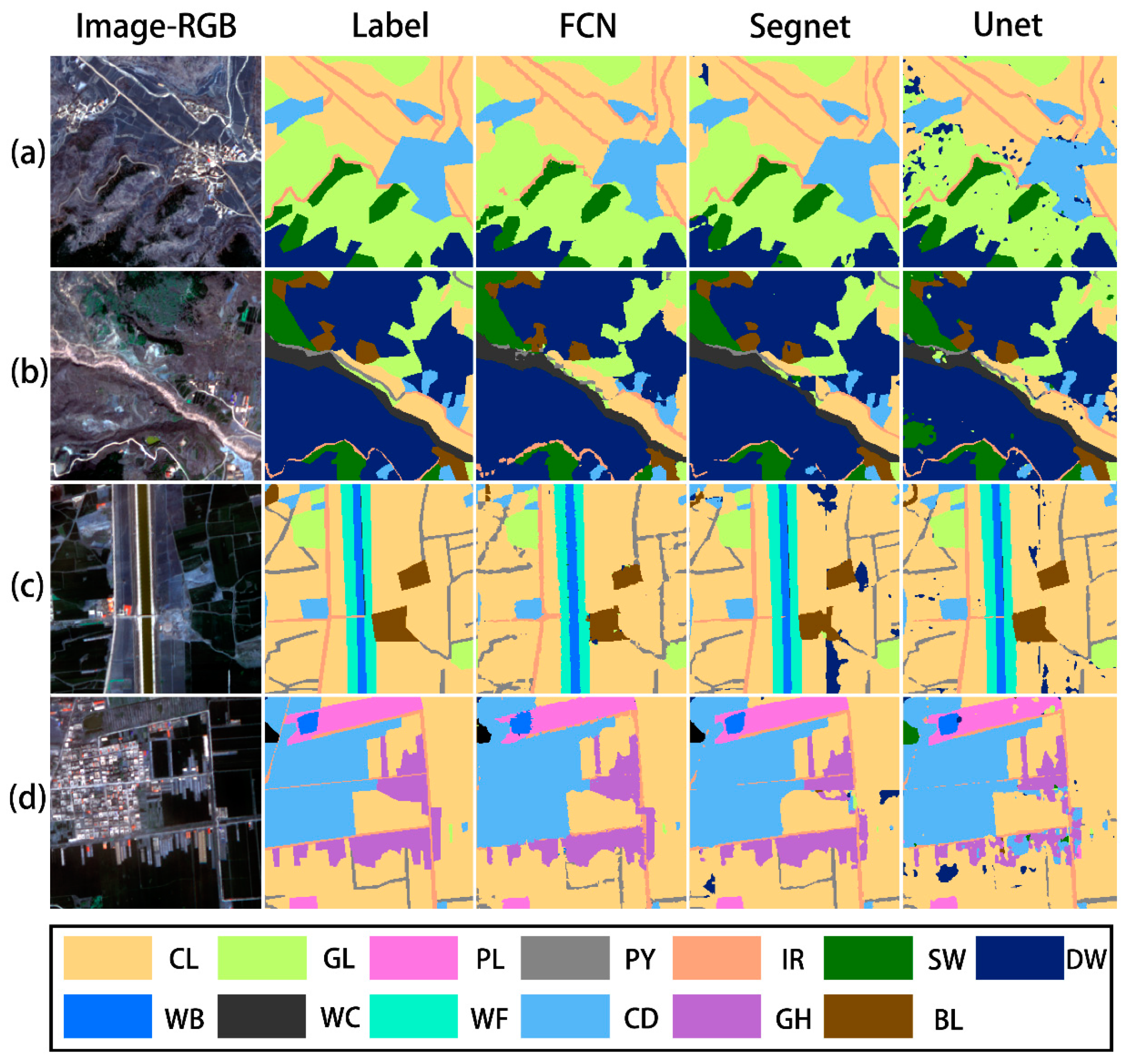
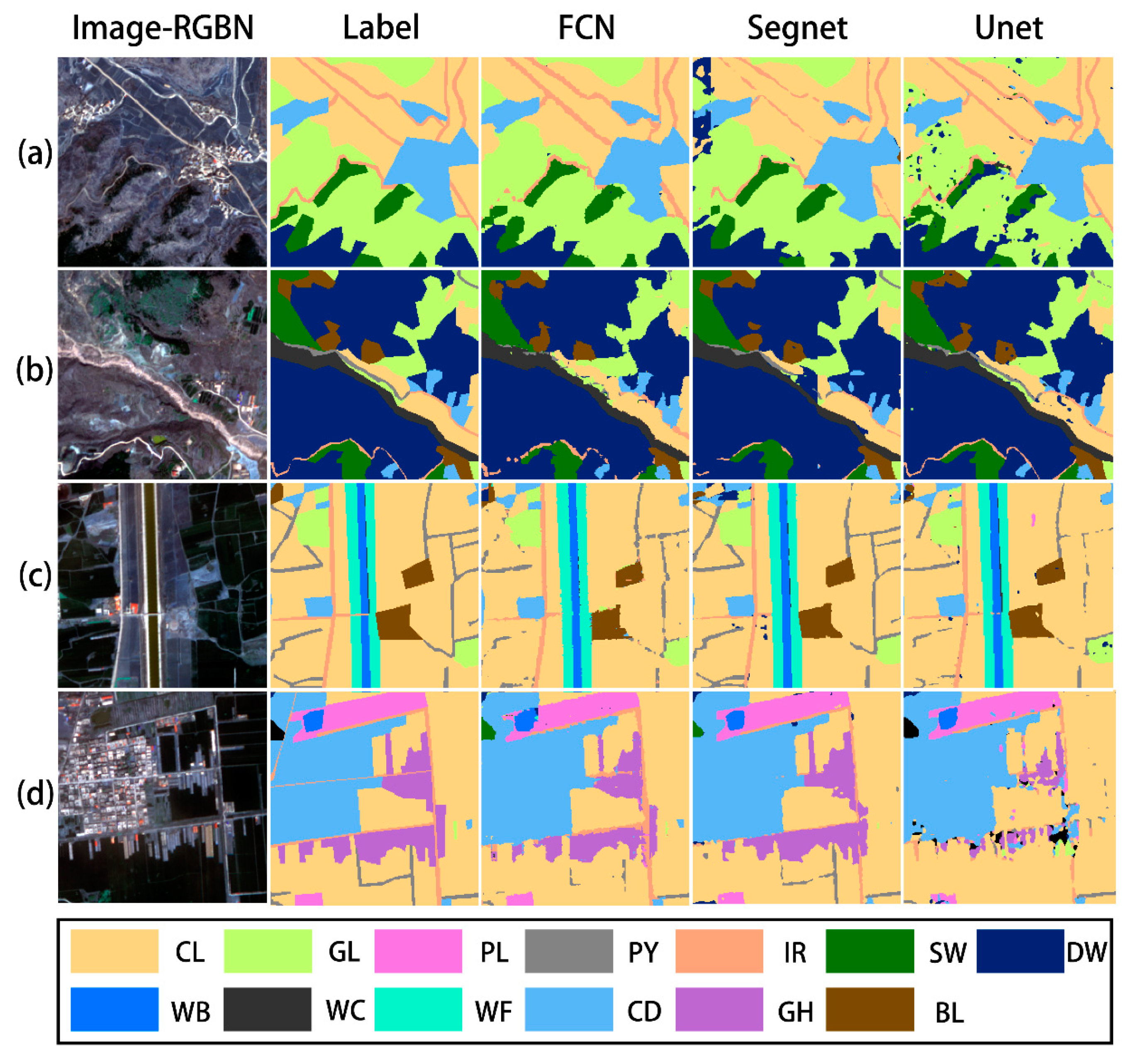
3.1. Classification Results and Visual Assessment
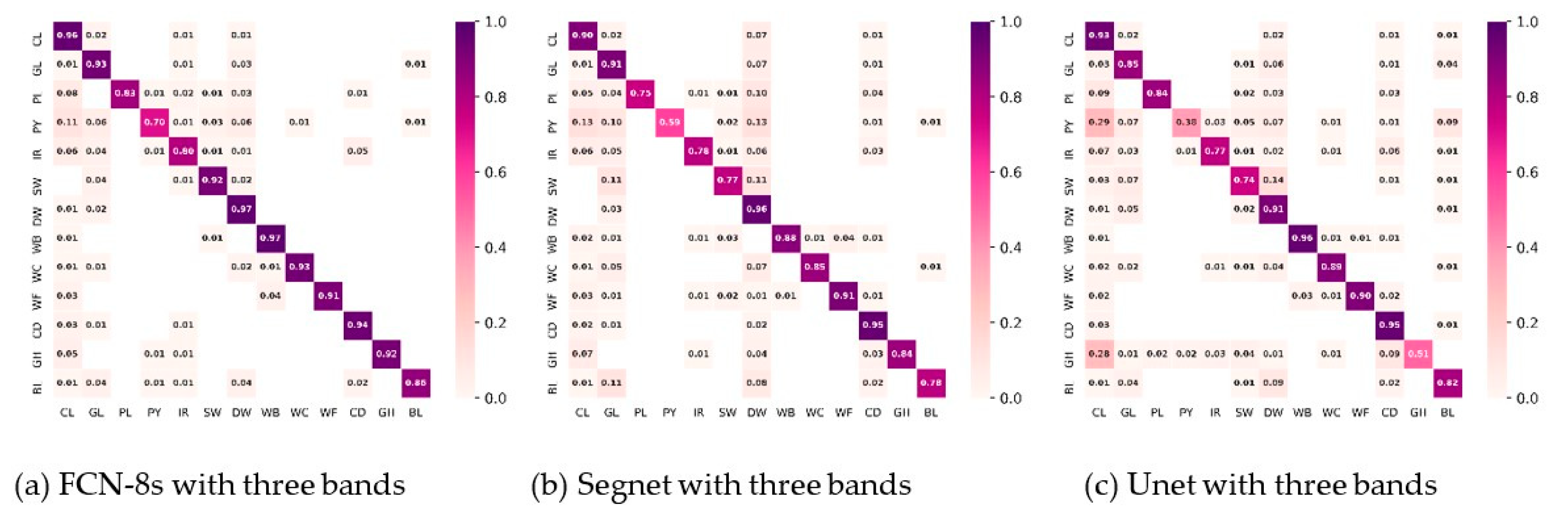
3.2. Classification Accuracy Assessment
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chen, J.; Chen, J.; Liao, A.; Cao, X.; Chen, L.; Chen, X.; He, C.; Han, G.; Peng, S.; Lu, M.; et al. Global land cover mapping at 30 m resolution: A POK-based operational approach. ISPRS J. Photogramm. Remote Sens. 2015, 103, 7–27. [Google Scholar] [CrossRef] [Green Version]
- Wulder, M.A.; Hermosilla, T.; Stinson, G.; Gougeon, F.A.; White, J.C.; Hill, D.A.; Smiley, B.P. Satellite-based time series land cover and change information to map forest area consistent with national and international reporting requirements. For. Int. J. For. Res. 2020, 93, 331–343. [Google Scholar] [CrossRef] [Green Version]
- Griffiths, P.; van der Linden, S.; Kuemmerle, T.; Hostert, P. A Pixel-Based Landsat Compositing Algorithm for Large Area Land Cover Mapping. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 2088–2101. [Google Scholar] [CrossRef]
- Hauser, L.T.; Nguyen Vu, G.; Nguyen, B.A.; Dade, E.; Nguyen, H.M.; Nguyen, T.T.Q.; Le, T.Q.; Vu, L.H.; Tong, A.T.H.; Pham, H.V. Uncovering the spatio-temporal dynamics of land cover change and fragmentation of mangroves in the Ca Mau peninsula, Vietnam using multi-temporal SPOT satellite imagery (2004–2013). Appl. Geogr. 2017, 86, 197–207. [Google Scholar] [CrossRef]
- Karakizi, C.; Karantzalos, K.; Vakalopoulou, M.; Antoniou, G. Detailed Land Cover Mapping from Multitemporal Landsat-8 Data of Different Cloud Cover. Remote Sens. 2018, 10, 1214. [Google Scholar] [CrossRef] [Green Version]
- Lobser, S.E.; Cohen, W.B. MODIS tasselled cap: Land cover characteristics expressed through transformed MODIS data. Int. J. Remote Sens. 2007, 28, 5079–5101. [Google Scholar] [CrossRef]
- Ratajczak, R.; Crispim-Junior, C.F.; Faure, E.; Fervers, B.; Tougne, L. Automatic Land Cover Reconstruction From Historical Aerial Images: An Evaluation of Features Extraction and Classification Algorithms. IEEE Trans. Image Process. 2019, 28, 3357–3371. [Google Scholar] [CrossRef] [PubMed]
- Preidl, S.; Lange, M.; Doktor, D. Introducing APiC for regionalised land cover mapping on the national scale using Sentinel-2A imagery. Remote Sens. Environ. 2020, 240, 111673. [Google Scholar] [CrossRef]
- Gong, P.; Liu, H.; Zhang, M.; Li, C.; Wang, J.; Huang, H.; Clinton, N.; Ji, L.; Li, W.; Bai, Y.; et al. Stable classification with limited sample: Transferring a 30-m resolution sample set collected in 2015 to mapping 10-m resolution global land cover in 2017. Sci. Bull. 2019, 64, 370–373. [Google Scholar] [CrossRef] [Green Version]
- Jin, B.; Ye, P.; Zhang, X.; Song, W.; Li, S. Object-Oriented Method Combined with Deep Convolutional Neural Networks for Land-Use-Type Classification of Remote Sensing Images. J. Indian Soc. Remote Sens. 2019, 47, 951–965. [Google Scholar] [CrossRef] [Green Version]
- Khan, N.; Chaudhuri, U.; Banerjee, B.; Chaudhuri, S. Graph convolutional network for multi-label VHR remote sensing scene recognition. Neurocomputing 2019, 357, 36–46. [Google Scholar] [CrossRef]
- Tong, X.-Y.; Lu, Q.; Xia, G.-S.; Zhang, L. Large-scale Land Cover Classification in GaoFen-2 Satellite Imagery. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018. [Google Scholar]
- Cheng, Y.; Jin, S.; Wang, M.; Zhu, Y.; Dong, Z. Image Mosaicking Approach for a Double-Camera System in the GaoFen2 Optical Remote Sensing Satellite Based on the Big Virtual Camera. Sensors 2017, 17, 1441. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, C.; Sargent, I.; Pan, X.; Gardiner, A.; Hare, J.; Atkinson, P.M. VPRS-Based Regional Decision Fusion of CNN and MRF Classifications for Very Fine Resolution Remotely Sensed Images. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4507–4521. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Pan, X.; Li, H.; Gardiner, A.; Sargent, I.; Hare, J.; Atkinson, P.M. A hybrid MLP-CNN classifier for very fine resolution remotely sensed image classification. ISPRS J. Photogramm. Remote Sens. 2018, 140, 133–144. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Fan, B.; Wang, L.; Bai, J.; Xiang, S.; Pan, C. Semantic labeling in very high resolution images via a self-cascaded convolutional neural network. ISPRS J. Photogramm. Remote Sens. 2018, 145, 78–95. [Google Scholar] [CrossRef] [Green Version]
- Sherrah, J. Fully Convolutional Networks for Dense Semantic Labelling of High-Resolution Aerial Imagery. arXiv 2016, arXiv:160602585 Cs. [Google Scholar]
- Heydari, S.S.; Mountrakis, G. Meta-analysis of deep neural networks in remote sensing: A comparative study of mono-temporal classification to support vector machines. ISPRS J. Photogramm. Remote Sens. 2019, 152, 192–210. [Google Scholar] [CrossRef]
- Ma, L.; Liu, Y.; Zhang, X.; Ye, Y.; Yin, G.; Johnson, B.A. Deep learning in remote sensing applications: A meta-analysis and review. ISPRS J. Photogramm. Remote Sens. 2019, 152, 166–177. [Google Scholar] [CrossRef]
- Zhang, C.; Sargent, I.; Pan, X.; Li, H.; Gardiner, A.; Hare, J.; Atkinson, P.M. An object-based convolutional neural network (OCNN) for urban land use classification. Remote Sens. Environ. 2018, 216, 57–70. [Google Scholar] [CrossRef] [Green Version]
- Mohammadimanesh, F.; Salehi, B.; Mahdianpari, M.; Gill, E.; Molinier, M. A new fully convolutional neural network for semantic segmentation of polarimetric SAR imagery in complex land cover ecosystem. ISPRS J. Photogramm. Remote Sens. 2019, 151, 223–236. [Google Scholar] [CrossRef]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation. arXiv 2015, arXiv:151100561 Cs. [Google Scholar] [CrossRef] [PubMed]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. arXiv 2015, arXiv:150504597 Cs. [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar] [CrossRef] [Green Version]
- Kemker, R.; Salvaggio, C.; Kanan, C. Algorithms for semantic segmentation of multispectral remote sensing imagery using deep learning. ISPRS J. Photogramm. Remote Sens. 2018, 145, 60–77. [Google Scholar] [CrossRef] [Green Version]
- Stivaktakis, R.; Tsagkatakis, G.; Tsakalides, P. Deep Learning for Multilabel Land Cover Scene Categorization Using Data Augmentation. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1031–1035. [Google Scholar] [CrossRef]
- Zhu, X.X.; Tuia, D.; Mou, L.; Xia, G.-S.; Zhang, L.; Xu, F.; Fraundorfer, F. Deep Learning in Remote Sensing: A Comprehensive Review and List of Resources. IEEE Geosci. Remote Sens. Mag. 2017, 5, 8–36. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Zhang, L.; Du, B. Deep Learning for Remote Sensing Data: A Technical Tutorial on the State of the Art. IEEE Geosci. Remote Sens. Mag. 2016, 4, 22–40. [Google Scholar] [CrossRef]
- Kroupi, E.; Kesa, M.; Navarro-Sánchez, V.D.; Saeed, S.; Pelloquin, C.; Alhaddad, B.; Moreno, L.; Soria-Frisch, A.; Ruffini, G. Deep convolutional neural networks for land-cover classification with Sentinel-2 images. J. Appl. Remote Sens. 2019, 13, 024525. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Land Cover Name | Code | Description | Polygon | Train Pixels | Test Pixels |
|---|---|---|---|---|---|
| Cereal Land | CL | Including rice, wheat, millet, soybeans, etc., mainly plant seeds and fruits | 496 | 907,785 | 226,946 |
| Grass Land | GL | Grassland is the land where herbs and shrubs are grown | 660 | 604,179 | 151,045 |
| Poplar Land | PL | Growing poplar | 38 | 18,622 | 4655 |
| Pathway in Farmland | PY | The road for people to walk between the fields | 268 | 48,829 | 12,207 |
| Impervious Road | IR | A road for people to drive through, a passage between the two places | 443 | 83,094 | 20,773 |
| Sparse Woods | SW | Forest land with a canopy cover less than 20% | 198 | 223,582 | 55,895 |
| Dense Woods | DW | Forest land with dense trees and canopy cover greater than 20% | 689 | 942,067 | 235,517 |
| Water Bodies | WB | The collection of water is an important part of the surface water ring | 26 | 14,213 | 3553 |
| Waterless Channel | WC | Refers to the waterway that can be navigable | 44 | 59,933 | 14,983 |
| Water Conservancy Facilities | WF | Land for reservoirs and hydraulic structures | 22 | 20,693 | 5173 |
| Construction Land | CD | This refers to the land where buildings and structures are built | 251 | 229,085 | 57,271 |
| Greenhouse | GH | A facility that can be used to grow plants by transmitting light and maintaining warmth | 46 | 14,641 | 3660 |
| Bare Land | BL | No exposed ground for plant growth | 148 | 114,279 | 28,570 |
| Class | 3 Band | 4 Band | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| FCN-8s | Segnet | Unet | FCN-8s | Segnet | Unet | |||||||||||||
| P | R | F1 | P | R | F1 | P | R | F1 | P | R | F1 | P | R | F1 | P | R | F1 | |
| Cereal Land (CL) | 0.96 | 0.96 | 0.96 | 0.97 | 0.90 | 0.93 | 0.93 | 0.93 | 0.93 | 0.96 | 0.96 | 0.96 | 0.96 | 0.92 | 0.94 | 0.93 | 0.92 | 0.93 |
| Grassland (GL) | 0.91 | 0.93 | 0.92 | 0.84 | 0.91 | 0.88 | 0.85 | 0.85 | 0.85 | 0.90 | 0.94 | 0.92 | 0.94 | 0.86 | 0.90 | 0.82 | 0.91 | 0.86 |
| Poplar Land (PL) | 0.95 | 0.83 | 0.89 | 0.99 | 0.75 | 0.85 | 0.88 | 0.84 | 0.86 | 0.95 | 0.86 | 0.90 | 0.97 | 0.80 | 0.88 | 0.96 | 0.76 | 0.85 |
| Pathway in Farmland (PY) | 0.78 | 0.70 | 0.74 | 0.94 | 0.59 | 0.73 | 0.83 | 0.38 | 0.52 | 0.90 | 0.52 | 0.66 | 0.91 | 0.57 | 0.70 | 0.89 | 0.52 | 0.66 |
| Impervious Road (IR) | 0.78 | 0.80 | 0.79 | 0.93 | 0.78 | 0.85 | 0.85 | 0.77 | 0.81 | 0.79 | 0.79 | 0.79 | 0.97 | 0.66 | 0.78 | 0.90 | 0.83 | 0.86 |
| Sparse Woods (SW) | 0.96 | 0.92 | 0.94 | 0.96 | 0.77 | 0.86 | 0.81 | 0.74 | 0.77 | 0.97 | 0.92 | 0.95 | 0.97 | 0.79 | 0.87 | 0.88 | 0.74 | 0.80 |
| Dense Woods (DW) | 0.96 | 0.97 | 0.96 | 0.85 | 0.96 | 0.90 | 0.89 | 0.91 | 0.90 | 0.96 | 0.97 | 0.96 | 0.8 | 0.99 | 0.88 | 0.89 | 0.91 | 0.90 |
| Water Bodies (WB) | 0.89 | 0.97 | 0.93 | 0.98 | 0.88 | 0.92 | 0.95 | 0.96 | 0.95 | 0.94 | 0.97 | 0.96 | 0.97 | 0.89 | 0.93 | 0.97 | 0.93 | 0.95 |
| Waterless Channel (WC) | 0.93 | 0.93 | 0.93 | 0.97 | 0.85 | 0.91 | 0.85 | 0.89 | 0.87 | 0.91 | 0.94 | 0.92 | 0.97 | 0.84 | 0.90 | 0.91 | 0.88 | 0.89 |
| Water Conservancy Facilities (WF) | 0.94 | 0.91 | 0.93 | 0.96 | 0.91 | 0.93 | 0.98 | 0.90 | 0.94 | 0.91 | 0.97 | 0.94 | 0.96 | 0.86 | 0.91 | 0.95 | 0.95 | 0.95 |
| Construction Land (CD) | 0.95 | 0.94 | 0.95 | 0.91 | 0.95 | 0.93 | 0.89 | 0.95 | 0.92 | 0.94 | 0.96 | 0.95 | 0.96 | 0.94 | 0.95 | 0.91 | 0.96 | 0.93 |
| Greenhouse (GH) | 0.92 | 0.92 | 0.92 | 1.00 | 0.84 | 0.91 | 0.98 | 0.51 | 0.67 | 0.99 | 0.83 | 0.90 | 0.98 | 0.84 | 0.9 | 0.99 | 0.78 | 0.87 |
| Bare Land (BL) | 0.90 | 0.86 | 0.88 | 0.93 | 0.78 | 0.85 | 0.66 | 0.82 | 0.73 | 0.94 | 0.88 | 0.91 | 0.93 | 0.76 | 0.84 | 0.83 | 0.71 | 0.77 |
| OA | 93.9% | 89.9% | 87.9% | 94.2% | 90.1% | 88.8% | ||||||||||||
| Kappa | 0.92 | 0.86 | 0.85 | 0.93 | 0.87 | 0.86 | ||||||||||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, Z.; Dian, Y.; Xia, H.; Zhou, J.; Jian, Y.; Yao, C.; Wang, X.; Li, Y. Comparing Fully Deep Convolutional Neural Networks for Land Cover Classification with High-Spatial-Resolution Gaofen-2 Images. ISPRS Int. J. Geo-Inf. 2020, 9, 478. https://doi.org/10.3390/ijgi9080478
Han Z, Dian Y, Xia H, Zhou J, Jian Y, Yao C, Wang X, Li Y. Comparing Fully Deep Convolutional Neural Networks for Land Cover Classification with High-Spatial-Resolution Gaofen-2 Images. ISPRS International Journal of Geo-Information. 2020; 9(8):478. https://doi.org/10.3390/ijgi9080478
Chicago/Turabian StyleHan, Zemin, Yuanyong Dian, Hao Xia, Jingjing Zhou, Yongfeng Jian, Chonghuai Yao, Xiong Wang, and Yuan Li. 2020. "Comparing Fully Deep Convolutional Neural Networks for Land Cover Classification with High-Spatial-Resolution Gaofen-2 Images" ISPRS International Journal of Geo-Information 9, no. 8: 478. https://doi.org/10.3390/ijgi9080478
APA StyleHan, Z., Dian, Y., Xia, H., Zhou, J., Jian, Y., Yao, C., Wang, X., & Li, Y. (2020). Comparing Fully Deep Convolutional Neural Networks for Land Cover Classification with High-Spatial-Resolution Gaofen-2 Images. ISPRS International Journal of Geo-Information, 9(8), 478. https://doi.org/10.3390/ijgi9080478