
Modelling of Parachute Airborne Clusters Flight Dynamics and Parachute Interactions

Abstract
:1. Introduction
2. Models and Equations
2.1. Deployment Stage
2.2. Inflation and Descent Stages
2.3. Model Validations
3. Flight Characteristics of Parachute Systems
3.1. Parachute and Flight Parameters
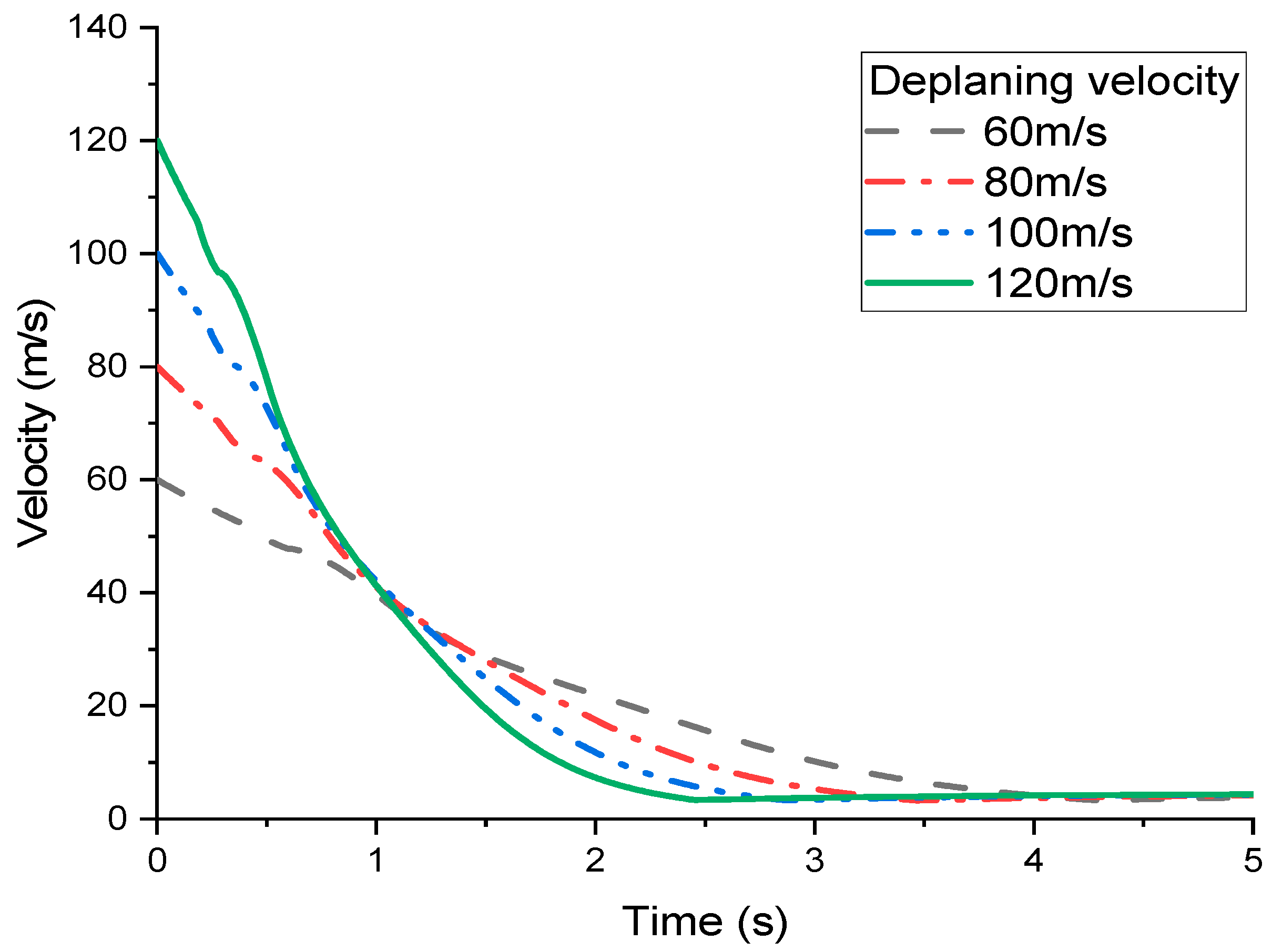
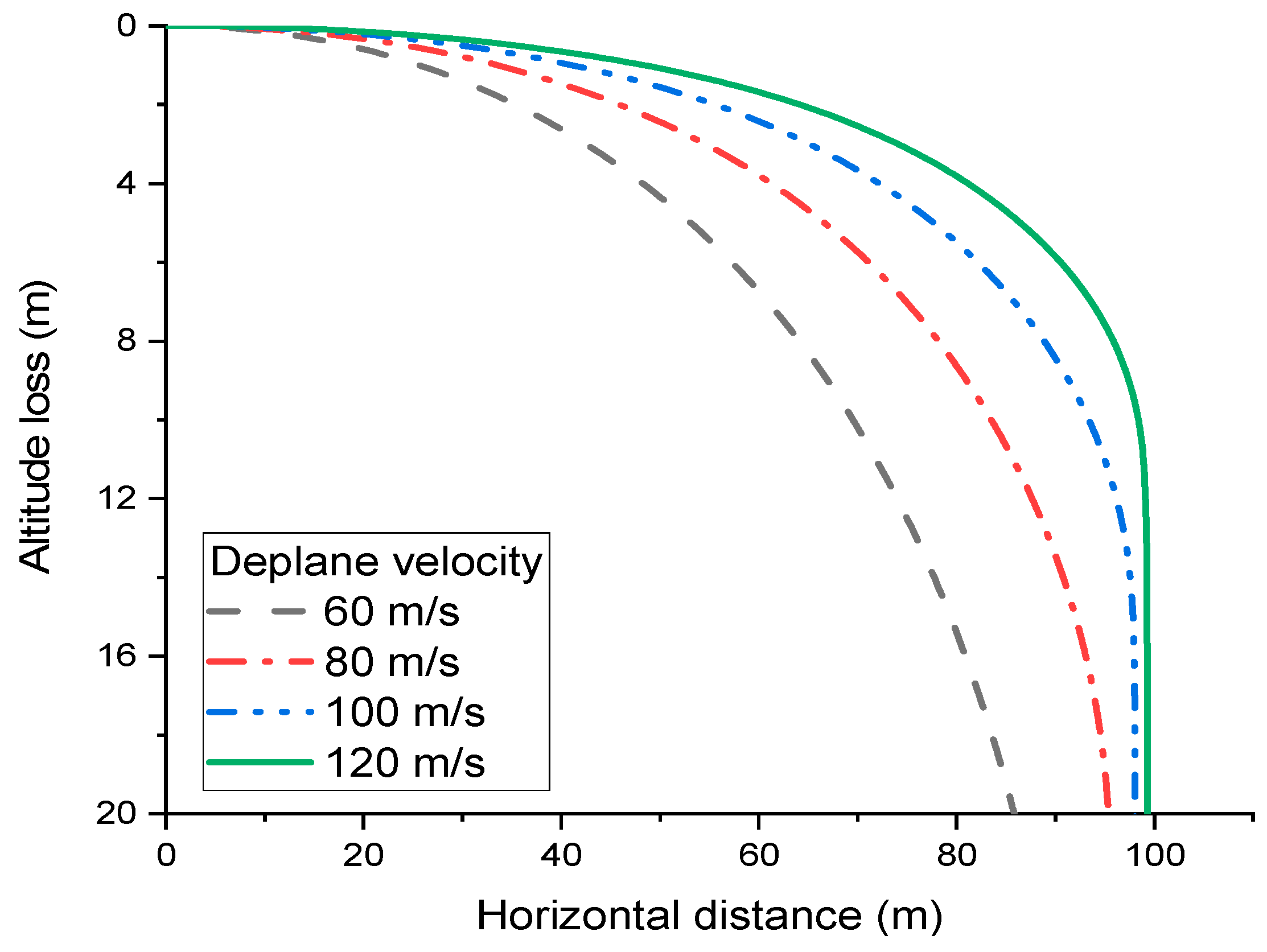
3.2. Effect of Flight Conditions
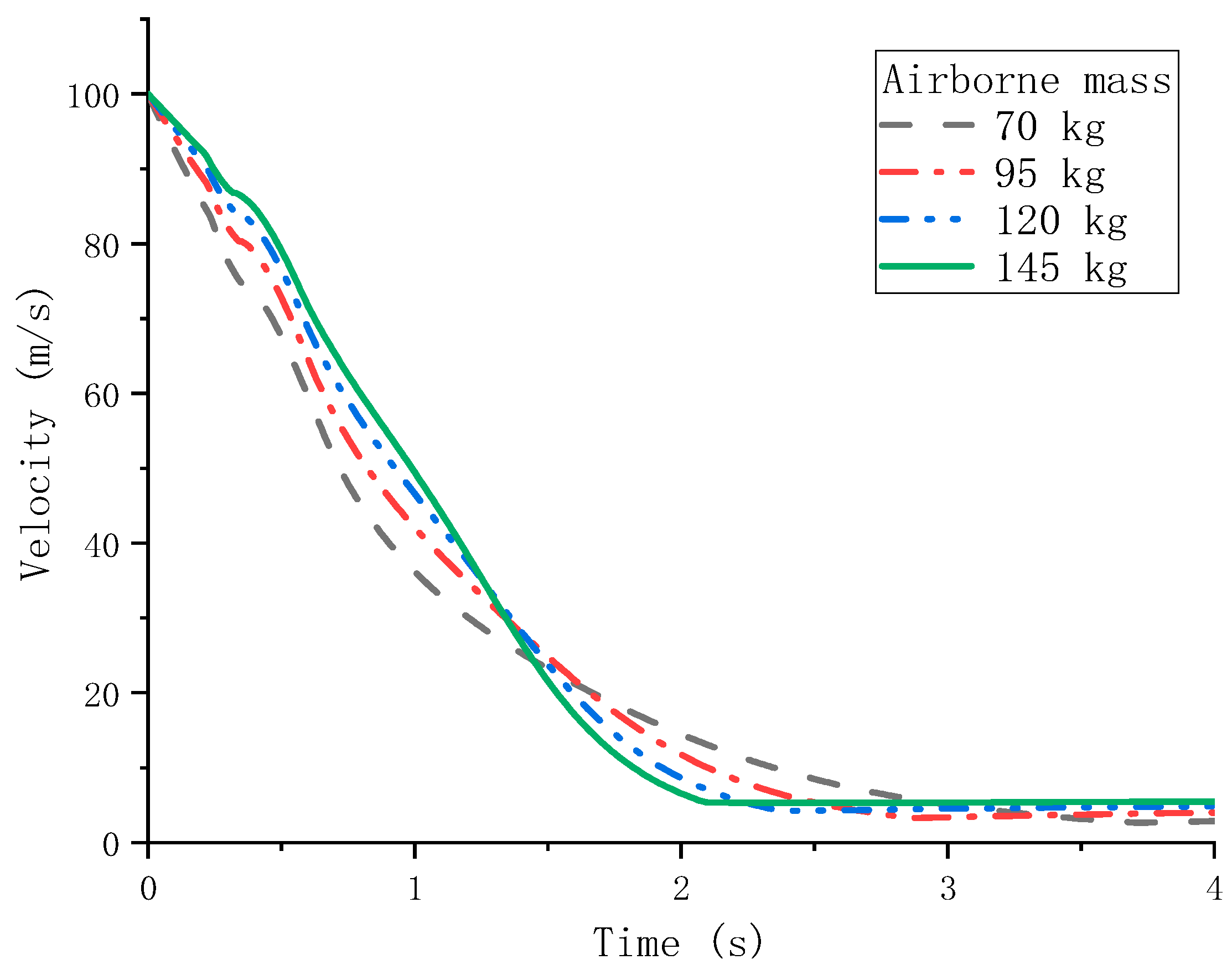
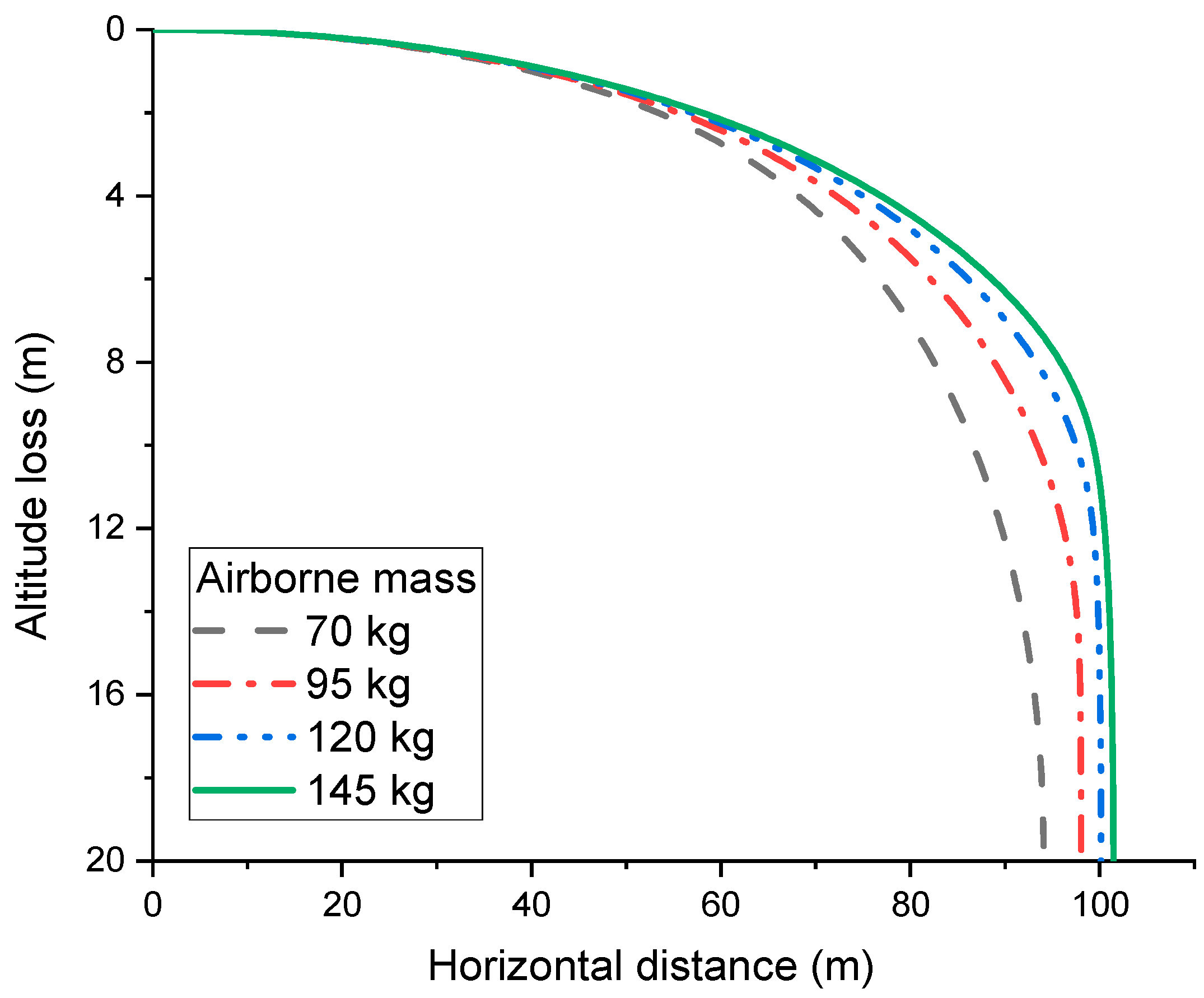
3.3. Effect of Airborne Mass
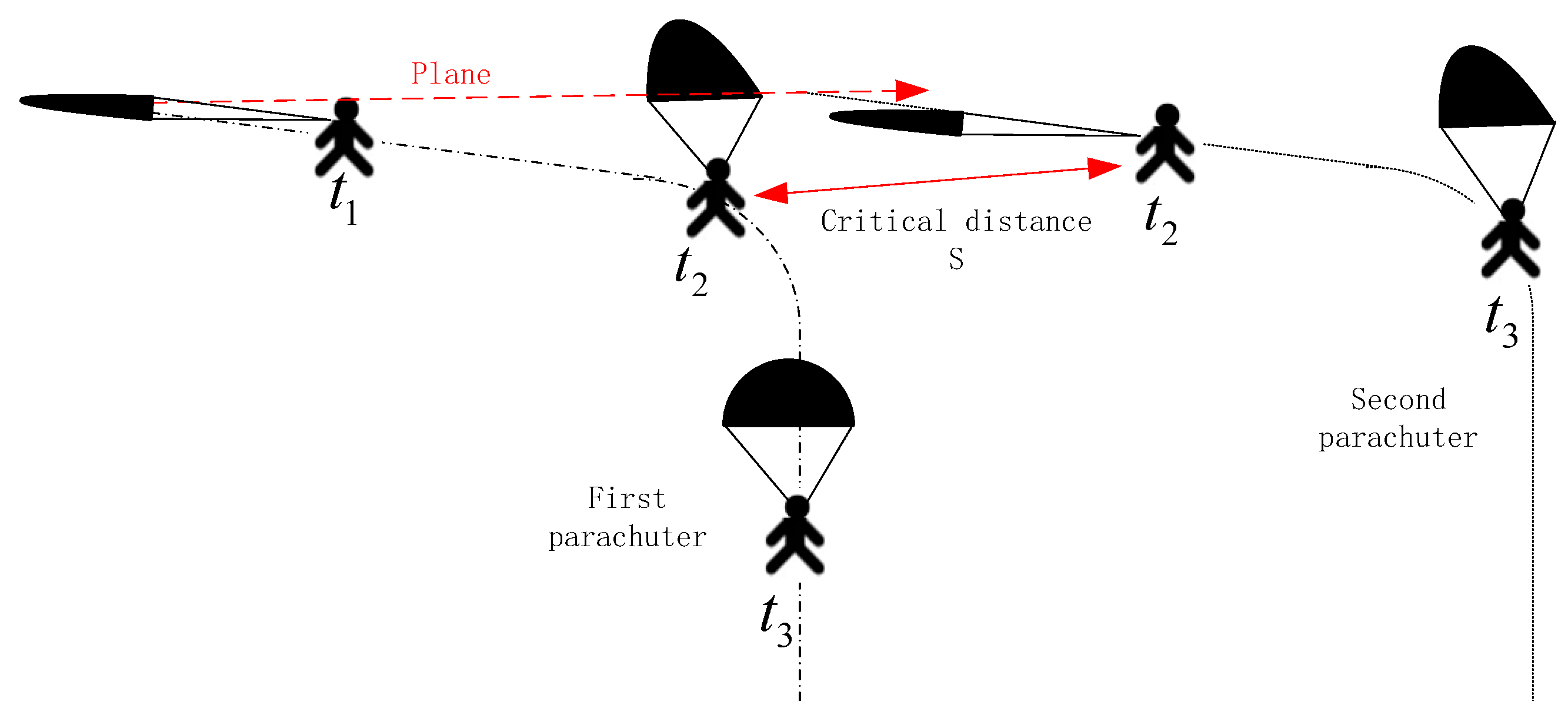
4. Interactions of Airborne Clusters
4.1. Criteria of Parachute Interactions
4.2. Airborne Conditions
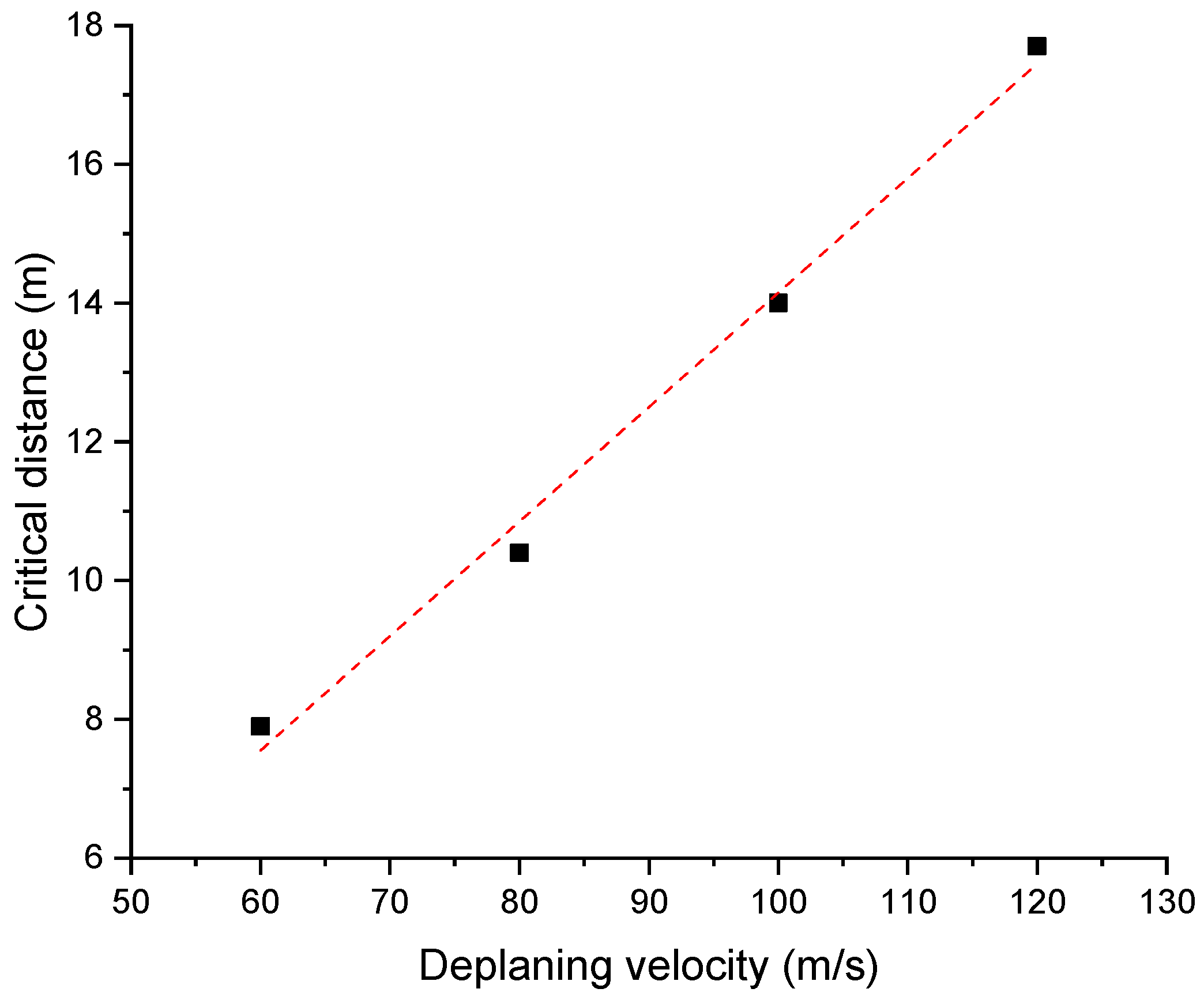
4.3. Effect of Flight Conditions
4.4. Effect of Airborne Sequence
5. Concluding Remarks
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Devlin, K. Army Skydiver Dies after Airshow Accident, CNN, 18 August 2015. Available online: https://wsvn.com/news/army-skydiver-dies-after-airshow-accident/amp/&ved=2ahUKEwi52t2_hIb7AhVxj2oFHdaxCYUQFnoECB0QAQ&usg=AOvVaw1I0etLe6fxRQD31Ec0SS1c (accessed on 30 October 2022).
- Wuest, M.R.; Benney, R.J. Precision Airdrop; The Research and Technology Organisation (RTO) of NATO: Natick, MA, USA, 2005. [Google Scholar]
- Zhang, S.; Yu, L.; Wu, Z.; Jia, H.; Liu, X. Numerical investigation of ram-air parachutes inflation with fluid-structure interaction method in wind environments. Aerosp. Sci. Technol. 2021, 109, 106400. [Google Scholar] [CrossRef]
- Pirson, J.; Verbiest, E. A study of some factors influencing military parachute landing injuries. Aviat. Space Environ. Med. 1985, 56, 564–567. [Google Scholar] [PubMed]
- Goodrick, T. Estimation of wind effect on gliding parachute cargo systems using computer simulation. In Proceedings of the AIAA Aerodynamic Deceleration Systems Conference, Dayton, OH, USA, 14–16 September 1970. [Google Scholar]
- Boustani, J.; Cadieux, F.; Kenway, G.; Barad, M.; Kiris, C.; Brehm, C. Fluid-structure interaction simulations of the ASPIRE SR01 supersonic parachute flight test. Aerosp. Sci. Technol. 2022, 126, 107596. [Google Scholar] [CrossRef]
- Bendura, R.J.; Lundstrom, R.R.; Renfroe, P.G.; Lecroy, S.R. Flight Tests of Viking Parachute System in Three Mach Number Regimes. 2: Parachute Test Results; NASA Langley Research Center: Hampton, VA, USA, 2013. [Google Scholar]
- O’Farrell, C.; Sonneveldt, B.S.; Karhgaard, C.; Tynis, J.A.; Clark, I.G. Overview of the ASPIRE Project’s Supersonic Flight Tests of a Strengthened DGB Parachute. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019. [Google Scholar]
- Stein, J.M.; Madsen, C.M.; Strahan, A.L. An Overview of the Guided Parafoil System Derived from X-38 Experience. In Proceedings of the 18th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar, Munich, Germany, 23–26 May 2005. [Google Scholar]
- Toni, R. Theory on the dynamics of bag strip for a parachute deployment aided. In Proceedings of the 2nd AIAA Aerodynamic Deceleration Systems Conference, El Centro, CA, USA, 23–25 September 1968. [Google Scholar]
- Huckins, E.K. Techniques for Selection and Analysis of Parachute Deployment Systems; NASA Langley Research Center: Hampton, VA, USA, 1970. [Google Scholar]
- Huckins, E.K. Snatch force during lines-first deployments. J. Aircr. 1971, 8, 298–299. [Google Scholar] [CrossRef]
- Heinrich, H. A parachute snatch force theory incorporating line disengagement impulses. In Proceedings of the 4th Aerodynamic Deceleration Systems Conference, Palm Springs, CA, USA, 21–23 May 1973. [Google Scholar]
- McVey, D.; Wolf, D. Analysis of Deloyment and Inflation of Large Ribbon Parachute. J. Aircr. 1974, 11, 96–103. [Google Scholar] [CrossRef]
- Purvis, J. Prediction of parachute line sail during lines-first deployment. J. Aircr. 1983, 20, 940–945. [Google Scholar] [CrossRef]
- Eckroth, W.; Garrard, W.; Miller, N. Design of a recovery system for a reentry vehicle. In Proceedings of the Third International Conference on Adaptive Structures, San Diego, CA, USA, 9–11 November 1992. [Google Scholar]
- Yu, L.; Shi, X.; Yuan, W. Effects of Parachute Deployment Using Attached Apex Drogue. J. Nanjing Univ. Aeronaut. Astronaut. 2009, 41, 198–201. [Google Scholar]
- Tang, M.; Wang, L.; Liu, Y.; Zhang, S. Effects of Aerodynamics on Line Sail During Parachute Deployment. In Proceedings of the ASME 2021 Fluids Engineering Division Summer Meeting, Virtual, Online, 10–12 August 2021. [Google Scholar]
- Zhang, Q.; Cheng, W.; Peng, Y.; Qin, Z. A Multi-Rigid-body Model of Parachute Deployment. Chin. Space Sci. Technol. 2003, 23, 45–50. [Google Scholar]
- Heinrich, H. The Opening Time of Parachutes Under Infinite Mass Conditions. In Proceedings of the AIAA 6th Aerospace Sciences Meeting, New York, NY, USA, 22–24 January 1968. [Google Scholar]
- Heinrich, H.; Noreen, R. Analysis of parachute opening dynamics with supporting wind-tunnel experiments. J. Aircr. 1970, 7, 341–347. [Google Scholar] [CrossRef]
- Berndt, R.; Deweese, J. Filling Time Prediction Approach for Solid Cloth Type Parachute Canopies. In Proceedings of the 1st AIAA Aerodynamic Decelerator Systems Technology Conference, Reston, VA, USA, 7–9 September 1966. [Google Scholar]
- Heinrich, H.; Saari, D. Parachute opening shock calculations with experimentally established input functions. J. Aircr. 1978, 15, 100–105. [Google Scholar] [CrossRef]
- Wolf, D. A simplified dynamic model of parachute inflation. J. Aircr. 1974, 11, 28–33. [Google Scholar] [CrossRef]
- French, K. Initial phase of parachute inflation. J. Aircr. 1969, 6, 376–378. [Google Scholar] [CrossRef]
- Scheubel, F. Notes on Opening Shock of a Parachute; B.I.O.S. Interrogation Report No.104: London, UK, 1946. [Google Scholar]
- Taylor, A.; Murphy, E. The DCLDYN parachute inflation and trajectory analysis tool-an overview. In Proceedings of the 18th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar, Munich, Germany, 23–26 May 2005. [Google Scholar]
- Macha, J. A simple, approximate model of parachute inflation. In Proceedings of the Aerospace Design Conference, Irvine, CA, USA, 16–19 February 1993. [Google Scholar]
- Guo, P.; Xia, G.; Qin, Z.-z. Automated Image Measurement of Parachute Projection Area under Inflation Process. Procedia Eng. 2012, 29, 1944–1951. [Google Scholar] [CrossRef] [Green Version]
- Ghaem-Maghami, E.; Desabrais, K.; Johari, H. Measurement of the geometry of a parachute canopy using image correlation photogrammetry. In Proceedings of the 19th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar, Williamsburg, VA, USA, 21–24 May 2007. [Google Scholar]
- Johari, H.; Desabrais, K.; Lee, C. Effects of Inflation Dynamics on the Drag of Round Parachute Canopies. In Proceedings of the 19th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar, Williamsburg, VA, USA, 21–24 May 2007. [Google Scholar]
- Haitao, G.; Dong, S.; Wang, Y.; Qin, Z. Influence of Inflation Conditions Parachute Inflation. Chin. Space Sci. Technol. 2008, 6, 45–51. [Google Scholar]
- Ginn, J.M.; Clark, I.G.; Braun, R.D. Parachute dynamic stability and the effects of apparent inertia. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, Atlanta, GA, USA, 16–20 June 2014. [Google Scholar]
- National Defence Industry Press. Editorialteam, Introduction of Parachute Technology; National Defence Industry Press: Beijing, China, 1977. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Deployment Stage | Inflation Stage | ||
|---|---|---|---|
| (m) | 10.6 | Parachute type | C-9 flat circle parachute |
| (m) | 15.49 | (m) | 8.5 |
| (m2) | 0.3 | Deployed velocity (m/s) | 77 |
| (kg) | 102.25 | (m2) | 45 |
| Altitude, h (m) | 600 | (kg) | 200 |
| Altitude, h (m) | 1850 |
| Airborne Altitude (m) | Deplaning Velocity (m/s) | Airborne Mass (kg) |
|---|---|---|
| 1000, 2000, 3000, 4000 | 100 | 95 |
| 1000 | 60, 80, 100, 120 | 95 |
| 1000 | 100 | 70, 95, 110, 130 |
| Mass Sequence of Parachute Systems (kg) | Airborne Altitude (m) | Deplaning Velocity (m/s) |
|---|---|---|
| 90-90 | 1000 | 100 |
| 2000 | ||
| 3000 | ||
| 4000 | ||
| 90-90 | 1000 | 60 |
| 80 | ||
| 100 | ||
| 120 | ||
| Mixed combinations of 70, 90, 120, 145 | 1000 | 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Qu, C.; Li, J.; Yu, L. Modelling of Parachute Airborne Clusters Flight Dynamics and Parachute Interactions. Aerospace 2023, 10, 51. https://doi.org/10.3390/aerospace10010051
Li Y, Qu C, Li J, Yu L. Modelling of Parachute Airborne Clusters Flight Dynamics and Parachute Interactions. Aerospace. 2023; 10(1):51. https://doi.org/10.3390/aerospace10010051
Chicago/Turabian StyleLi, Yanjun, Congyuan Qu, Jun Li, and Li Yu. 2023. "Modelling of Parachute Airborne Clusters Flight Dynamics and Parachute Interactions" Aerospace 10, no. 1: 51. https://doi.org/10.3390/aerospace10010051