
Predefined-Time Control of a Spacecraft Attitude with Thrust Booms

Abstract
:1. Introduction
2. Mathematical Model and Problem Formulation
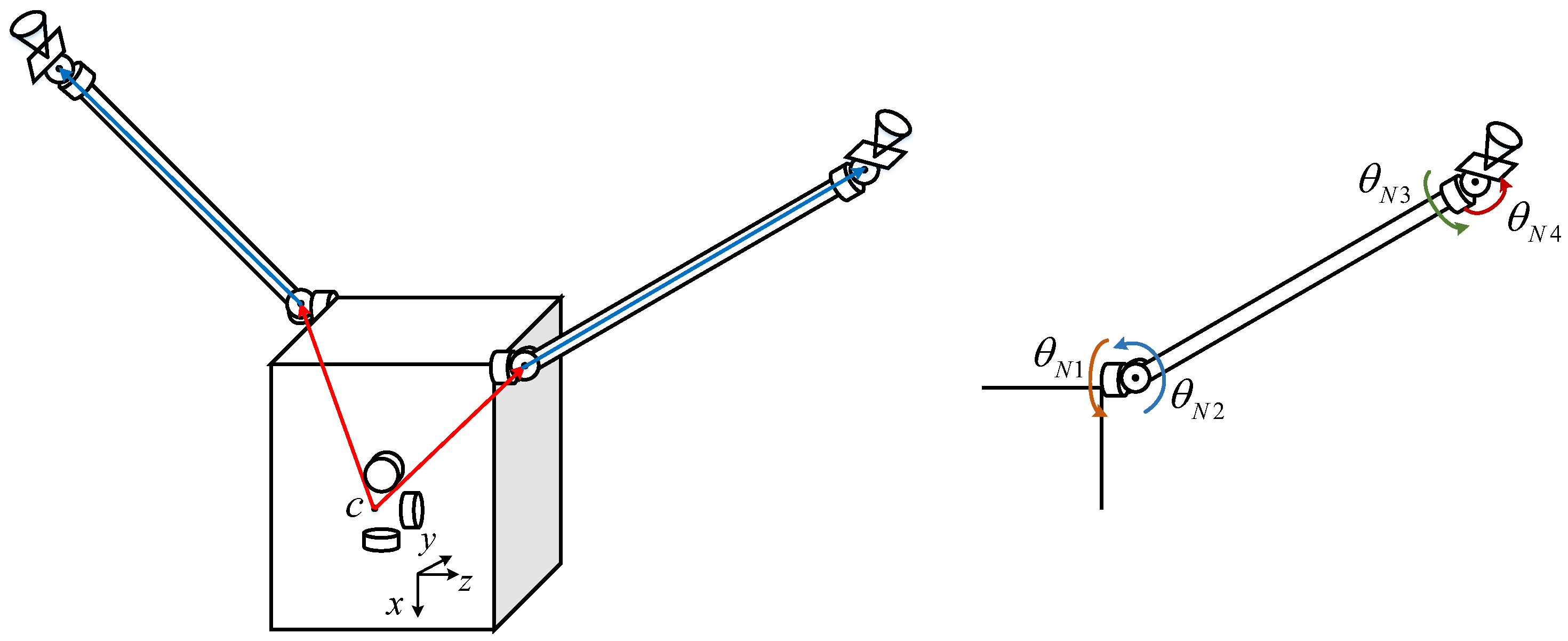
2.1. Mathematical Model of Spacecraft
2.2. Preliminaries
- (1)
- ;
- (2)
- ;
- (3)
- For , the derivative of satisfies:where , are constants. Then the system is predefined-time stable with the predefined-time .
- (1)
- ;
- (2)
- ;
- (3)
- For , the derivative of satisfies:where , , are constants. Then for any initial state, the system can converge within the bounds within a predefined-time.
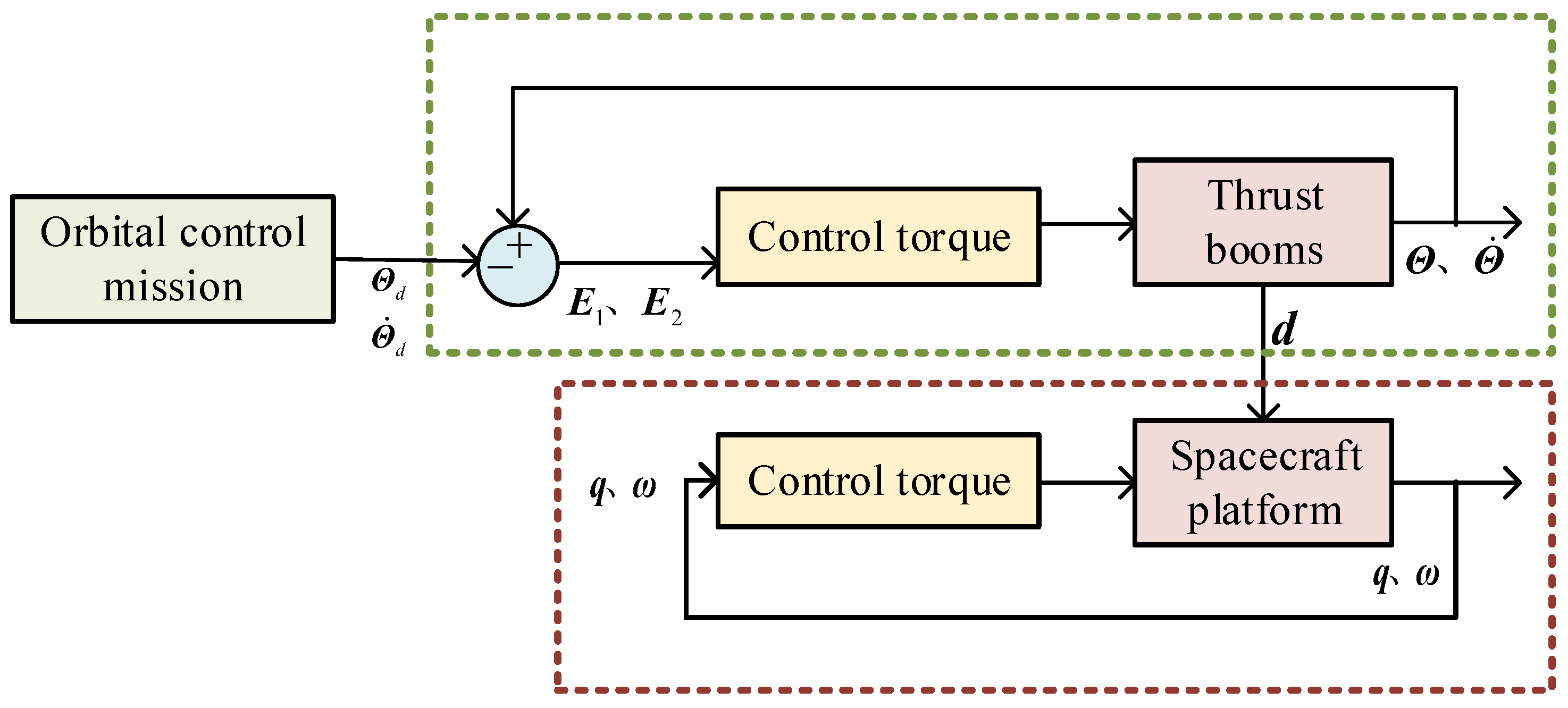
3. Predefined-Time Controller Design for Thrust Boom
3.1. Predefined-Time Disturbance Observer
3.2. Predefined-Time Controller Design Base on Second-Order Sliding Mode
4. Predefined-Time Attitude Stable for Spacecraft
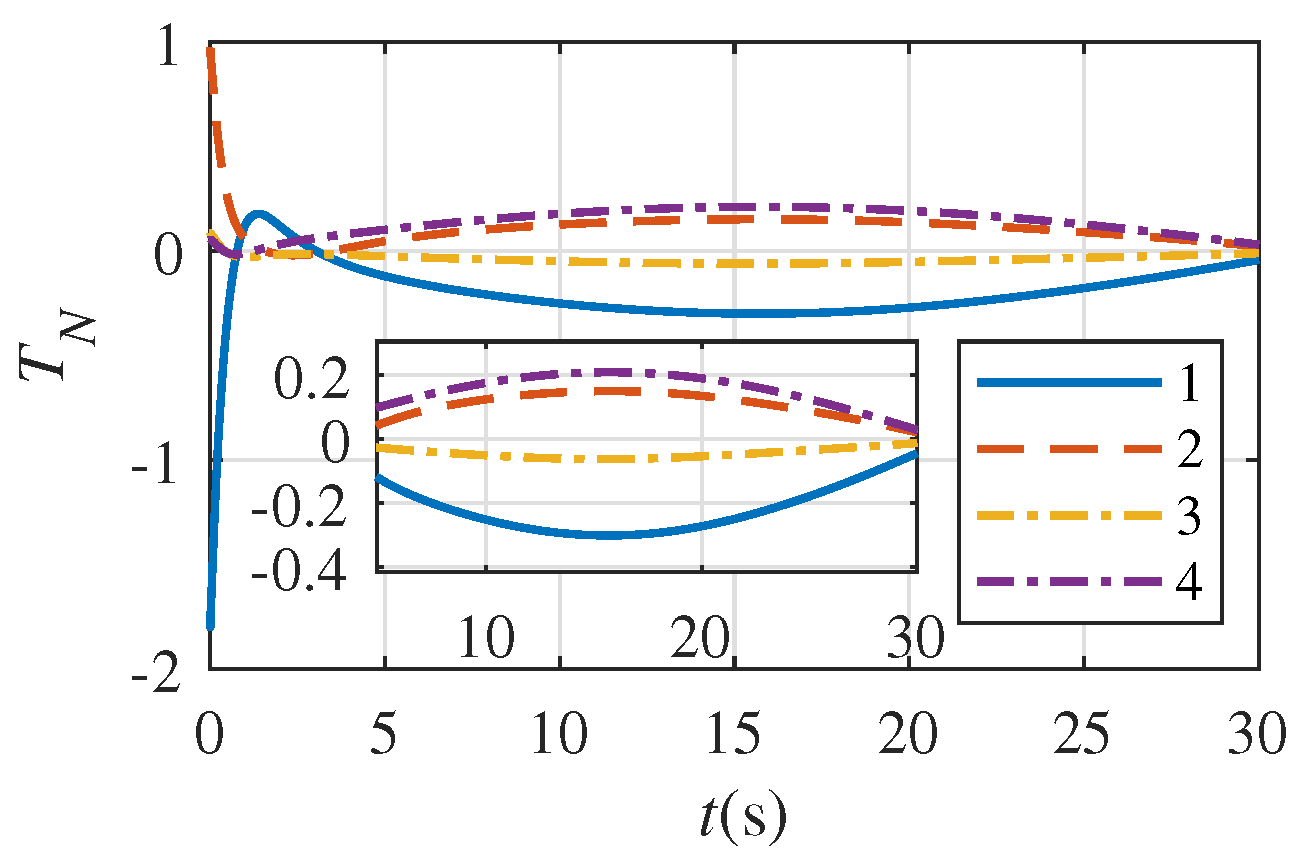
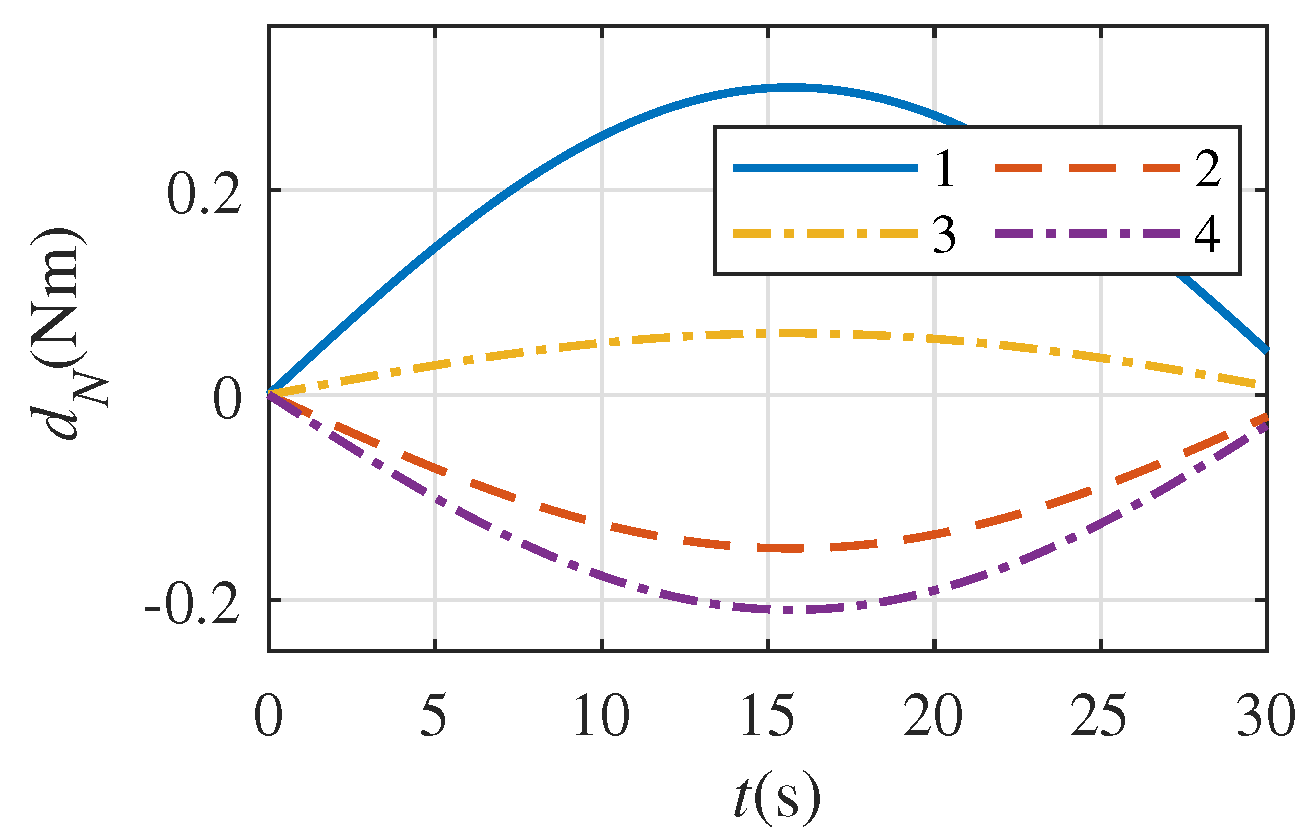
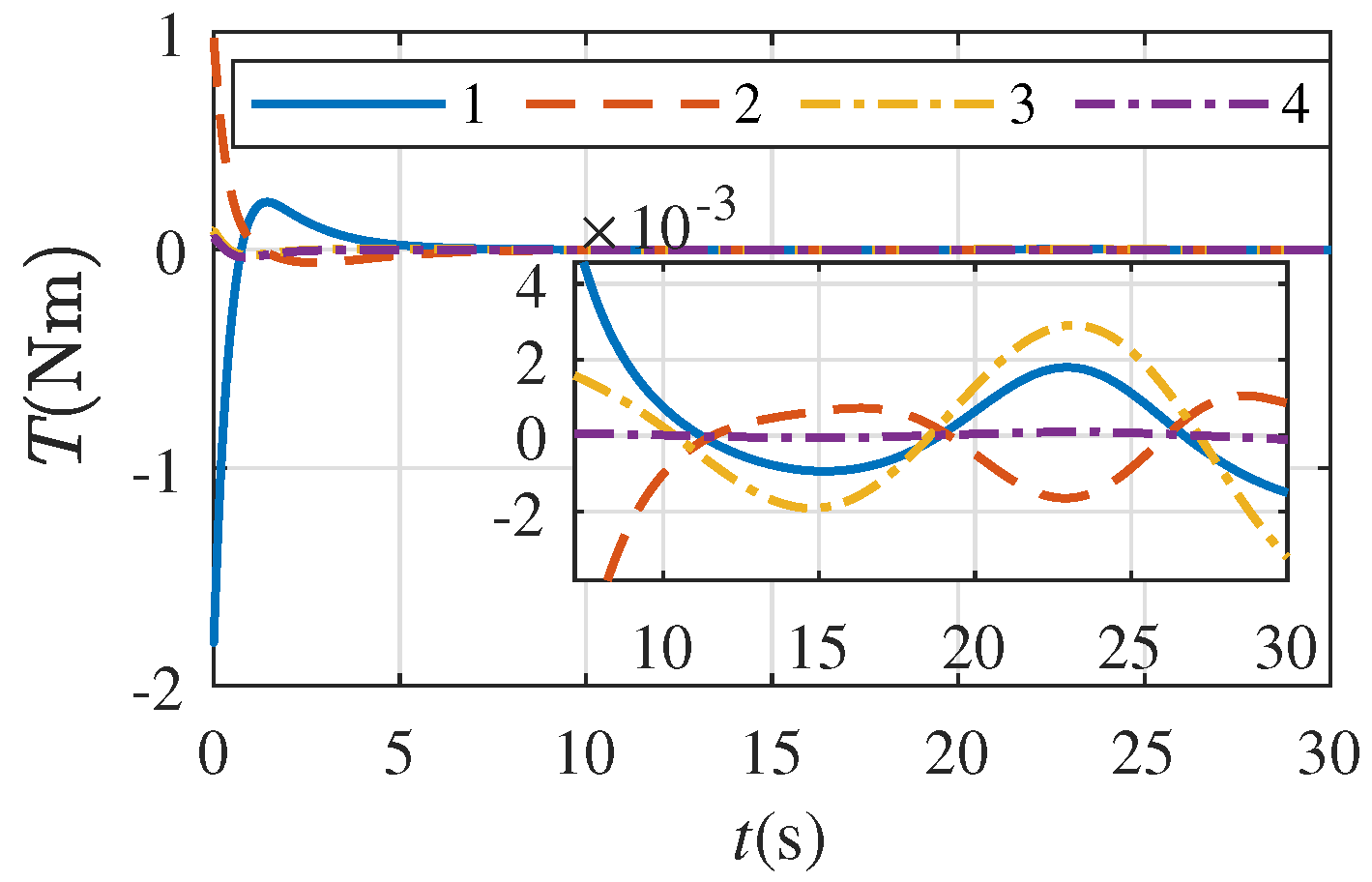
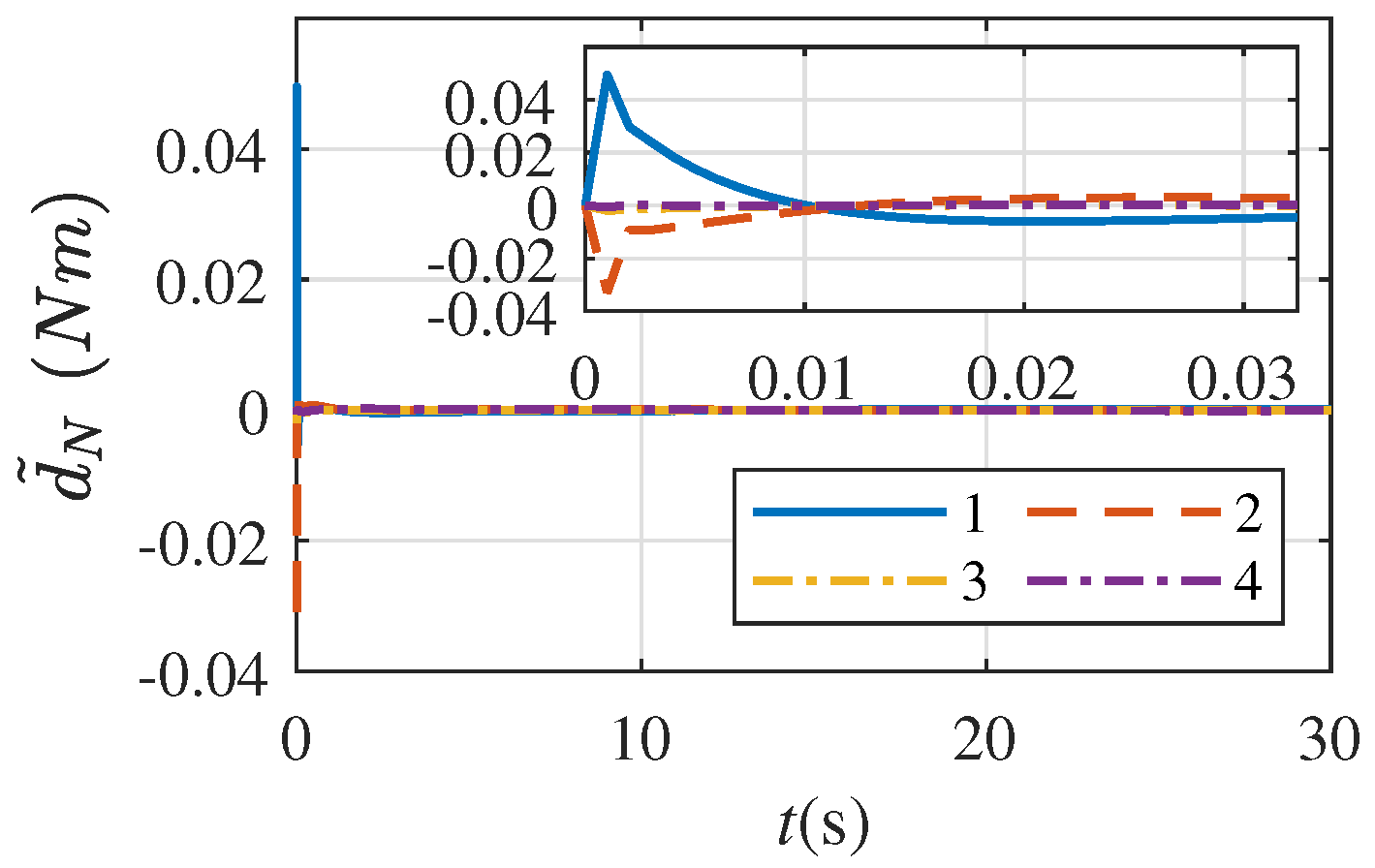
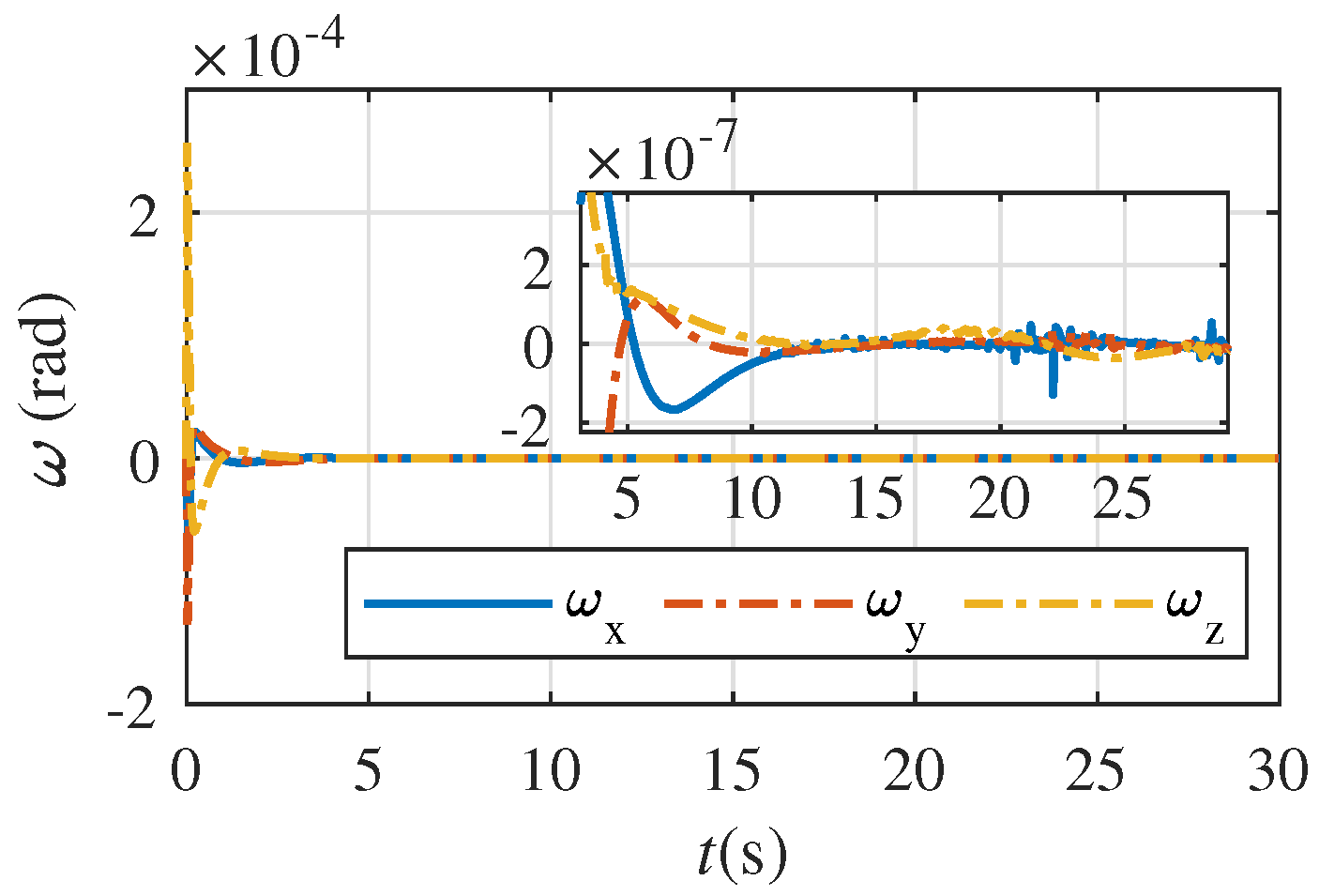
5. Numerical Simulation Example
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Walsh, A.; Di Cairano, S.; Weiss, A. MPC for coupled station keeping, attitude control, and momentum management of low-thrust geostationary satellites. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 7408–7413. [Google Scholar]
- Martinez-Sanchez, M.; Pollard, J.E. Spacecraft electric propulsion—An overview. J. Propuls. Power 1998, 14, 688–699. [Google Scholar] [CrossRef] [Green Version]
- Wei, Y.; Yan, H.; Liu, X.; Yu, Y.; Geng, J.; Chen, T.; Fu, T.; Su, G.; Hu, Y.; Han, D. The View of Micropropulsion Technology for China’s Advanced Small Platforms in Deep Space. Space Sci. Technol. 2022, 2022, 9769713. [Google Scholar] [CrossRef]
- Wertz, J.R.; Larson, W.J.; Kirkpatrick, D.; Klungle, D. Space Mission Analysis and Design; Springer: Dordrecht, The Netherlands, 1999; Volume 8. [Google Scholar]
- Herman, D.A.; Soulas, G.C.; Van Noord, J.L.; Patterson, M.J. NASA’s evolutionary xenon thruster (NEXT) long-duration test results. J. Propuls. Power 2012, 28, 625–635. [Google Scholar] [CrossRef]
- Caverly, R.; Di Cairano, S.; Weiss, A. Control Allocation and Quantization of a GEO Satellite with 4DOF Gimbaled Thruster Booms. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 1687. [Google Scholar]
- Gazzino, C.; Arzelier, D.; Louembet, C.; Cerri, L.; Pittet, C.; Losa, D. Long-term electric-propulsion geostationary station-keeping via integer programming. J. Guid. Control Dyn. 2019, 42, 976–991. [Google Scholar] [CrossRef]
- Leomanni, M.; Bianchini, G.; Garulli, A.; Giannitrapani, A.; Quartullo, R. Orbit control techniques for space debris removal missions using electric propulsion. J. Guid. Control Dyn. 2020, 43, 1259–1268. [Google Scholar] [CrossRef]
- Caverly, R.J.; Di Cairano, S.; Weiss, A. Electric Satellite Station Keeping, Attitude Control, and Momentum Management by MPC. IEEE Trans. Control Syst. Technol. 2020, 29, 1475–1489. [Google Scholar] [CrossRef]
- Li, B.; Qin, K.; Xiao, B.; Yang, Y. Finite-time extended state observer based fault tolerant output feedback control for attitude stabilization. ISA Trans. 2019, 91, 11–20. [Google Scholar] [CrossRef]
- Nagesh, I.; Edwards, C. A multivariable super-twisting sliding mode approach. Automatica 2014, 50, 984–988. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Liu, J.; Wang, L. Disturbance observer based attitude control for flexible spacecraft with input magnitude and rate constraints. Aerosp. Sci. Technol. 2018, 72, 486–492. [Google Scholar] [CrossRef]
- Zhang, C.; Dai, M.Z.; Wu, J.; Xiao, B.; Li, B.; Wang, M. Neural-networks and event-based fault-tolerant control for spacecraft attitude stabilization. Aerosp. Sci. Technol. 2021, 114, 106746. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, Y. An AEFA-Based Optimum Design of Fuzzy PID Controller for Attitude Control Flywheel with BLDC Motor. Aerospace 2022, 9, 789. [Google Scholar] [CrossRef]
- Hu, Q.; Li, B.; Xiao, B.; Zhang, Y. Spacecraft attitude fault-tolerant control based on iterative learning observer and control allocation. In Control Allocation for Spacecraft Under Actuator Faults; Springer: Singapore, 2021; pp. 133–155. [Google Scholar]
- Miao, Y.; Hwang, I.; Liu, M.; Wang, F. Adaptive fast nonsingular terminal sliding mode control for attitude tracking of flexible spacecraft with rotating appendage. Aerosp. Sci. Technol. 2019, 93, 105312. [Google Scholar] [CrossRef]
- Xia, X.; Jia, Y.; Wang, X.; Zhang, J. Neural-Network-Based Terminal Sliding Mode Control of Space Robot Actuated by Control Moment Gyros. Aerospace 2022, 9, 730. [Google Scholar] [CrossRef]
- Fu, J.; Liu, M.; Cao, X.; Li, A. Robust neural-network-based quasi-sliding-mode control for spacecraft-attitude maneuvering with prescribed performance. Aerosp. Sci. Technol. 2021, 112, 106667. [Google Scholar] [CrossRef]
- Pukdeboon, C. Optimal sliding mode controllers for attitude stabilization of flexible spacecraft. Math. Probl. Eng. 2011, 2011, 863092. [Google Scholar] [CrossRef]
- Tiwari, P.M.; Janardhanan, S.U.; un Nabi, M. Rigid spacecraft attitude control using adaptive integral second order sliding mode. Aerosp. Sci. Technol. 2015, 42, 50–57. [Google Scholar] [CrossRef]
- Hu, Q.; Niu, G. Attitude output feedback control for rigid spacecraft with finite-time convergence. ISA Trans. 2017, 70, 173–186. [Google Scholar] [CrossRef]
- Geng, Y.; Li, C.; Guo, Y.; Biggs, J.D. Fixed-time near-optimal control for repointing maneuvers of a spacecraft with nonlinear terminal constraints. ISA Trans. 2020, 97, 401–414. [Google Scholar] [CrossRef]
- Gao, S.; Liu, X.; Jing, Y.; Dimirovski, G.M. A novel finite-time prescribed performance control scheme for spacecraft attitude tracking. Aerosp. Sci. Technol. 2021, 118, 107044. [Google Scholar] [CrossRef]
- Hua, B.; Zhong, S.; Wu, Y.; Chen, Z. Research into a Consistency Cooperative Control Method for Attitude Orbit Coupling of SAR Satellite Formations under Communication Constraints. Aerospace 2022, 9, 556. [Google Scholar] [CrossRef]
- Du, H.; Zhang, J.; Wu, D.; Zhu, W.; Li, H.; Chu, Z. Fixed-time attitude stabilization for a rigid spacecraft. ISA Trans. 2020, 98, 263–270. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Z.G.; Zhou, D.; Shi, X.N.; Li, R.F.; Kan, B.Q. Prescribed performance fixed-time tracking control for a class of second-order nonlinear systems with disturbances and actuator saturation. Int. J. Control 2021, 94, 223–234. [Google Scholar] [CrossRef]
- Muñoz-Vázquez, A.J.; Sánchez-Torres, J.D.; Gutiérrez-Alcalá, S.; Jiménez-Rodríguez, E.; Loukianov, A.G. Predefined-time robust contour tracking of robotic manipulators. J. Frankl. Inst. 2019, 356, 2709–2722. [Google Scholar] [CrossRef]
- Xie, S.; Chen, Q. Adaptive nonsingular predefined-time control for attitude stabilization of rigid spacecrafts. IEEE Trans. Circuits Syst. II Express Briefs 2021, 69, 189–193. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Base | 1 | N1 | N3 | N4 | S1 | S2 | S3 | S4 | |
|---|---|---|---|---|---|---|---|---|---|---|
| Mass (kg) | 500 | 3 | 6 | 3 | 2 | 3 | 6 | 3 | 2 | |
| (m) | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 0 | 0.038 | 0 | 0.038 | 0 | 0.038 | 0 | 0.038 | 0 | ||
| 0 | 0 | 0.15 | 0 | 0.075 | 0 | 0.15 | 0 | 0.075 | ||
| (m) | 0.356 | −0.356 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| −0.491 | 0.491 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 0.491 | −0.491 | 0.062 | 0.15 | 0.062 | 0.16 | 0.062 | 0.15 | 0.062 | 0.16 | |
| moment of inertia () | 150 | 0.033 | 0.15 | 0.033 | 0.052 | 0.033 | 0.15 | 0.033 | 0.052 | |
| 150 | 0.017 | 0.15 | 0.017 | 0.052 | 0.017 | 0.15 | 0.017 | 0.052 | ||
| 120 | 0.026 | 0.075 | 0.026 | 0.02 | 0.026 | 0.075 | 0.026 | 0.02 | ||
| 0.26 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| 0.37 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| −0.29 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, X.; Sun, Y.; Guo, Y.; Ma, G.; Gong, Y. Predefined-Time Control of a Spacecraft Attitude with Thrust Booms. Aerospace 2023, 10, 94. https://doi.org/10.3390/aerospace10020094
Kong X, Sun Y, Guo Y, Ma G, Gong Y. Predefined-Time Control of a Spacecraft Attitude with Thrust Booms. Aerospace. 2023; 10(2):94. https://doi.org/10.3390/aerospace10020094
Chicago/Turabian StyleKong, Xianglong, Yue Sun, Yanning Guo, Guangfu Ma, and Youmin Gong. 2023. "Predefined-Time Control of a Spacecraft Attitude with Thrust Booms" Aerospace 10, no. 2: 94. https://doi.org/10.3390/aerospace10020094