

A New Force Control Method by Combining Traditional PID Control with Radial Basis Function Neural Network for a Spacecraft Low-Gravity Simulation System

Abstract
:1. Introduction
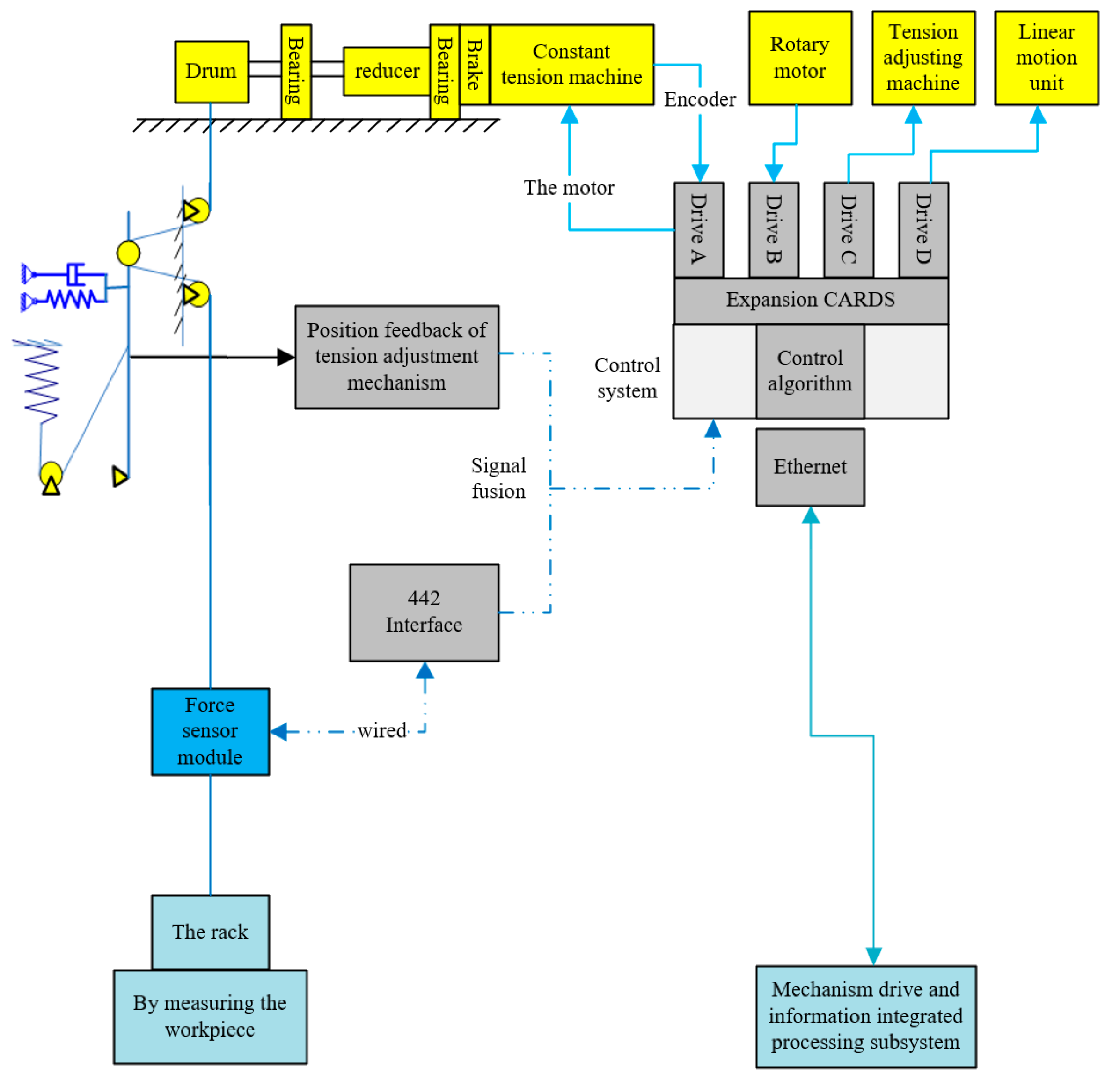
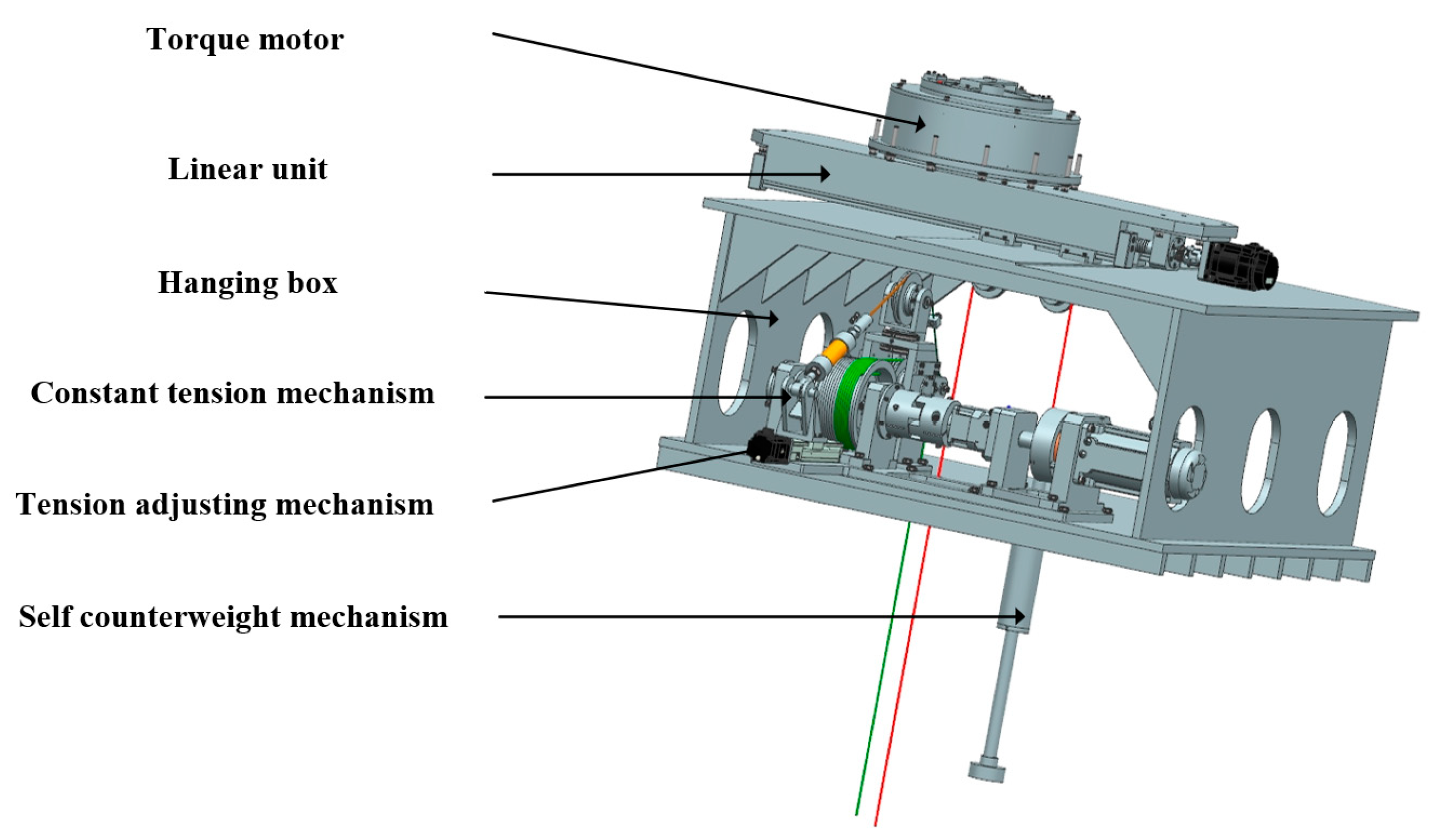
2. Low Gravity Simulation System Scheme
3. Mathematical Modeling of Constant-Tension System
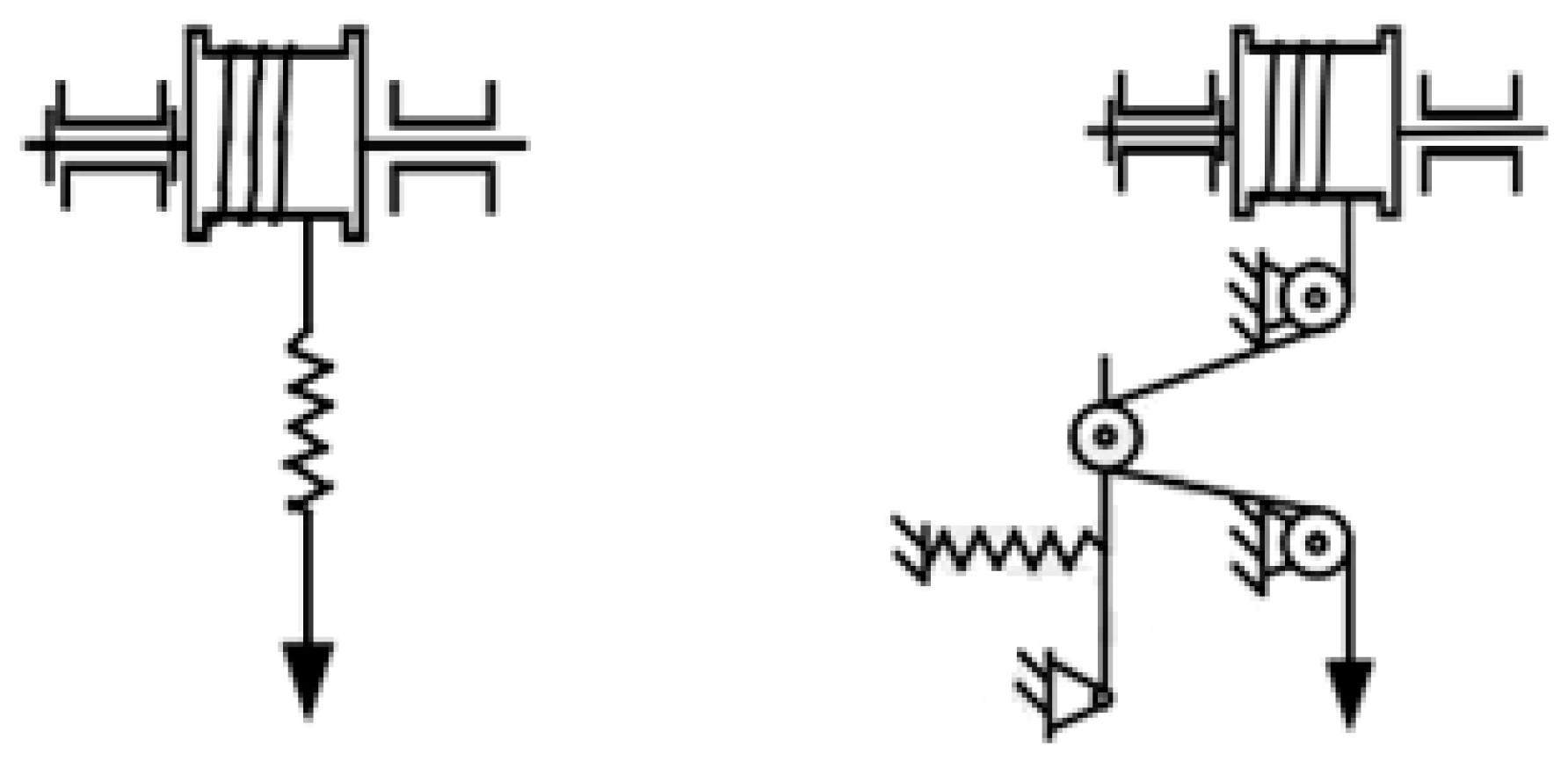
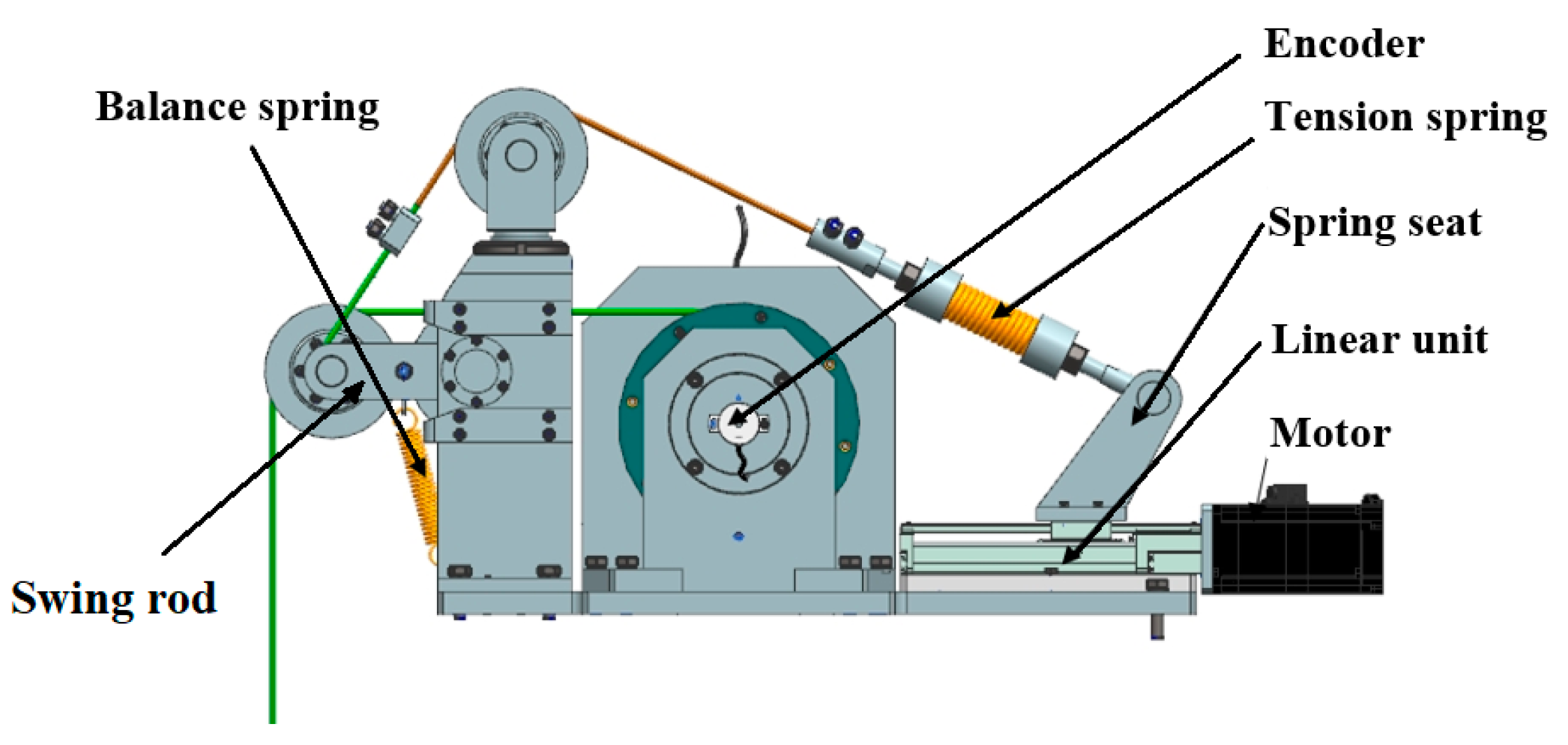
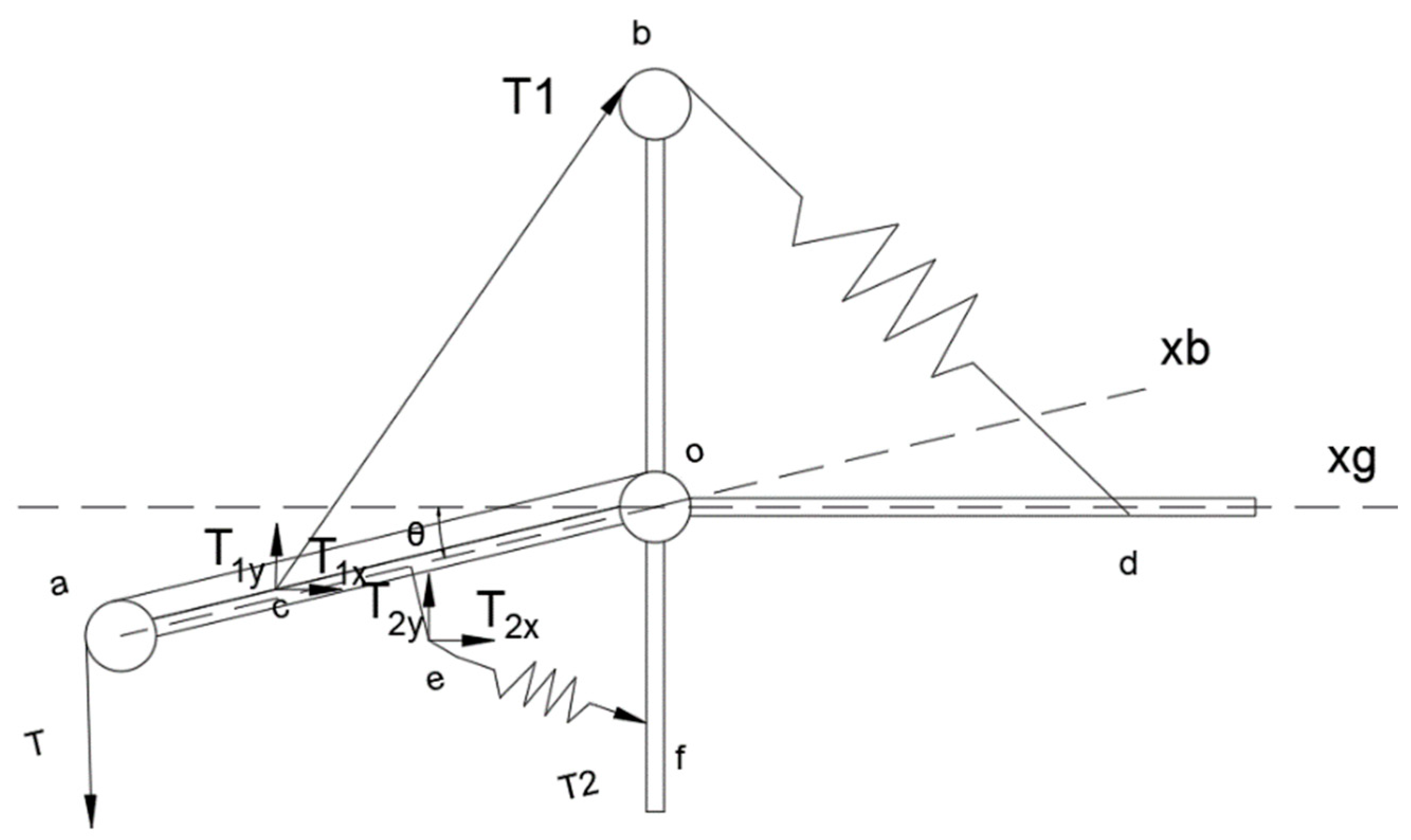
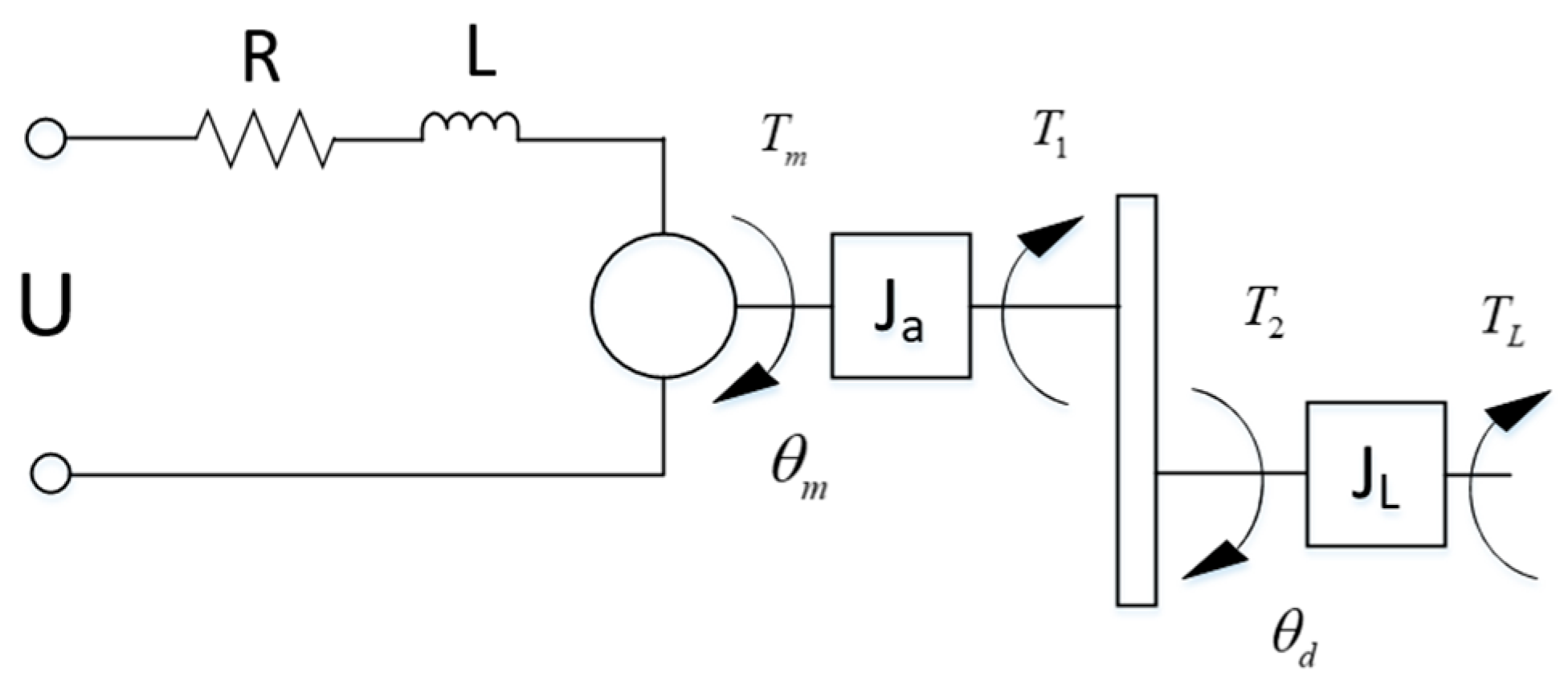
3.1. Modeling of the Buffer Mechanism
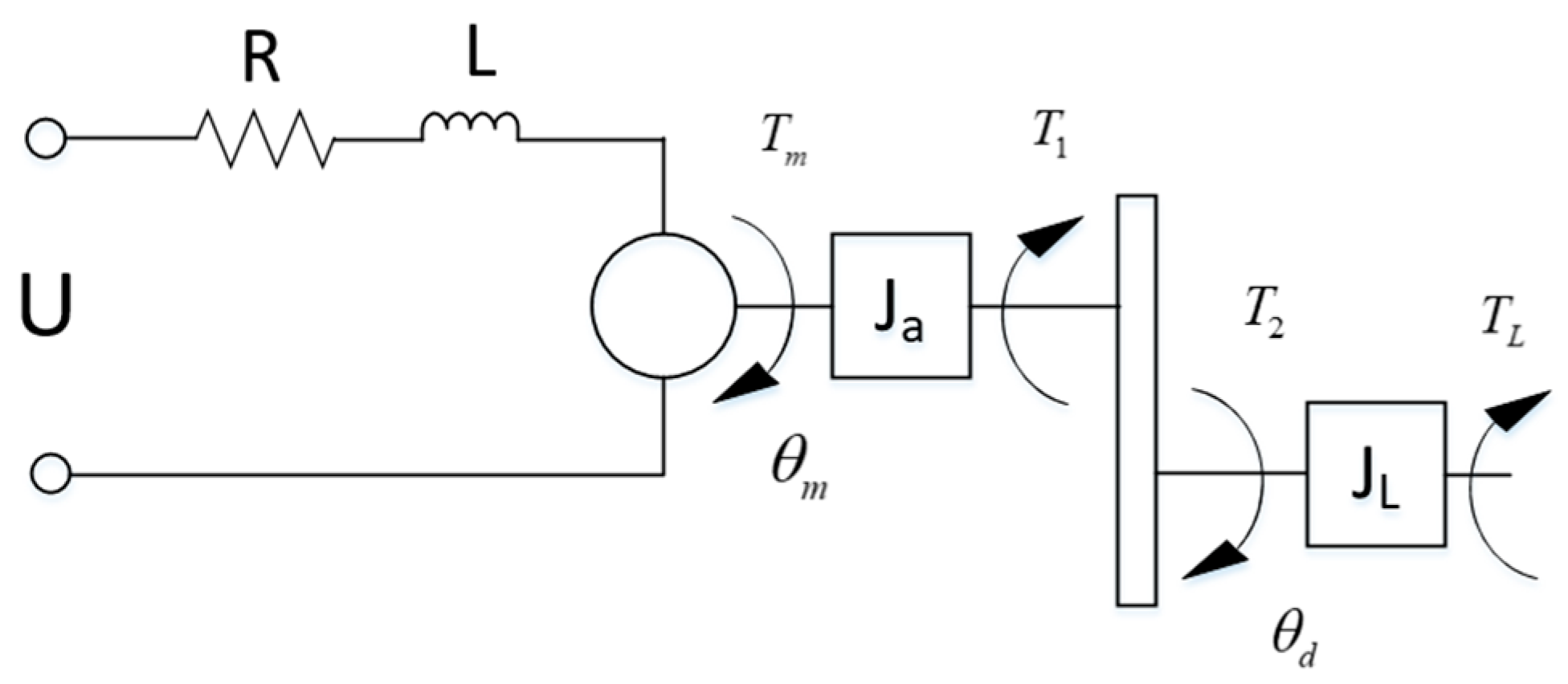
3.2. Overall Modeling of Constant-Tension System
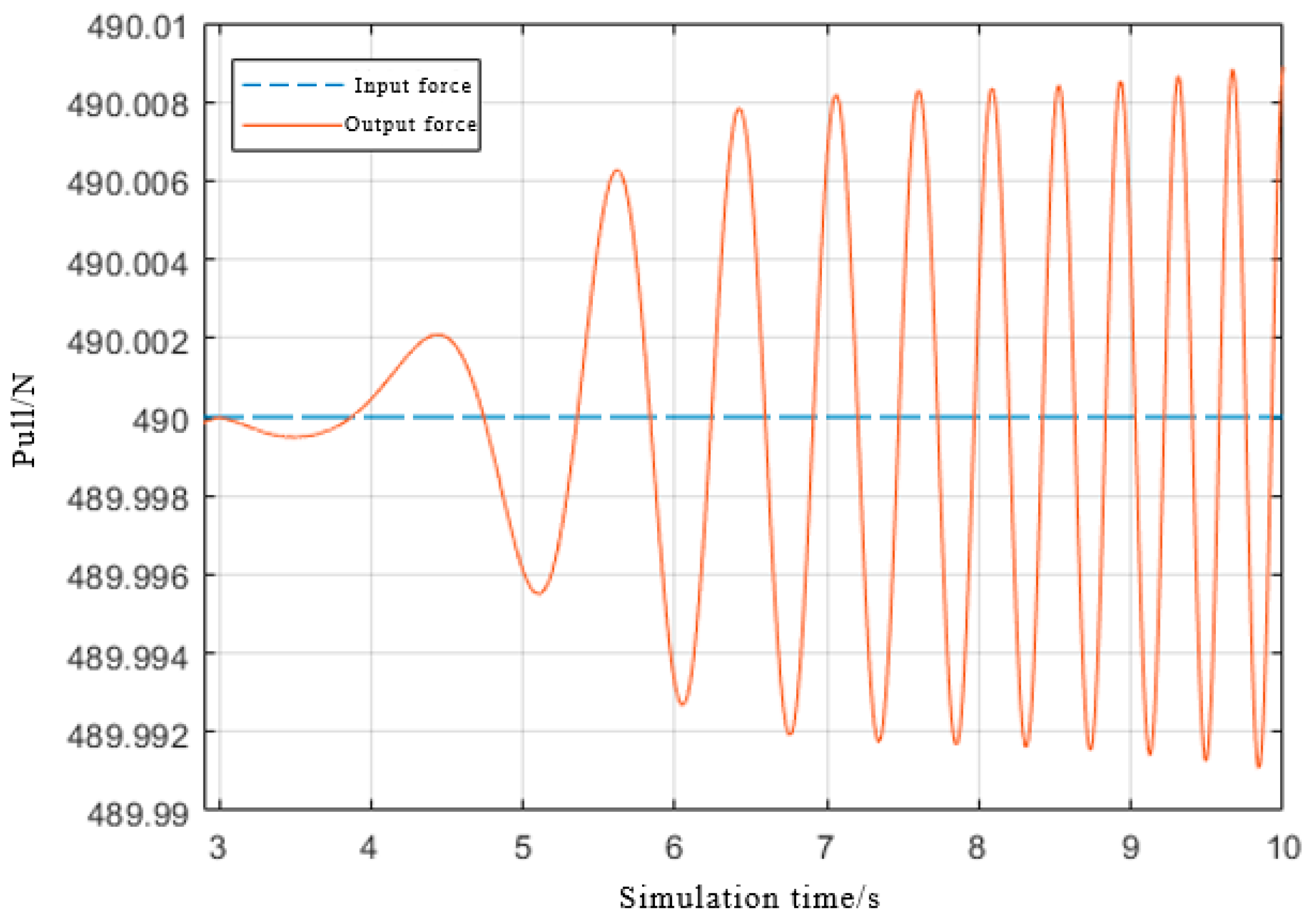
3.3. PID Control System Construction
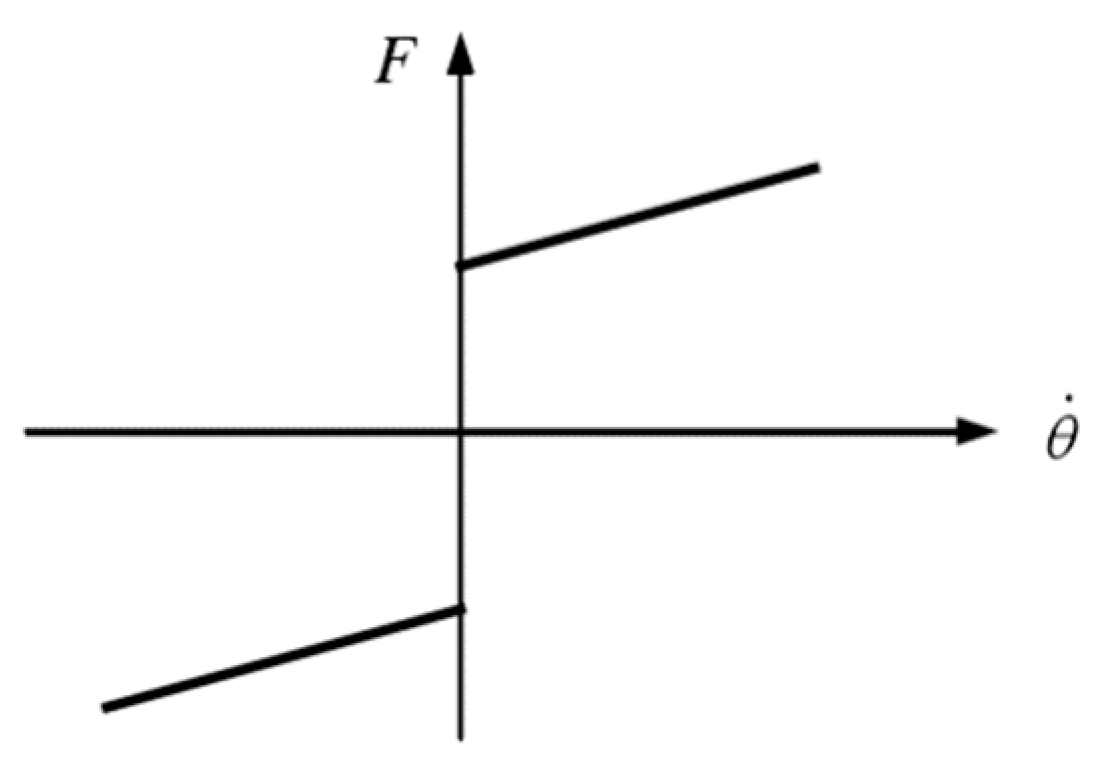
3.4. Influence of System Friction on Constant-Tension Control
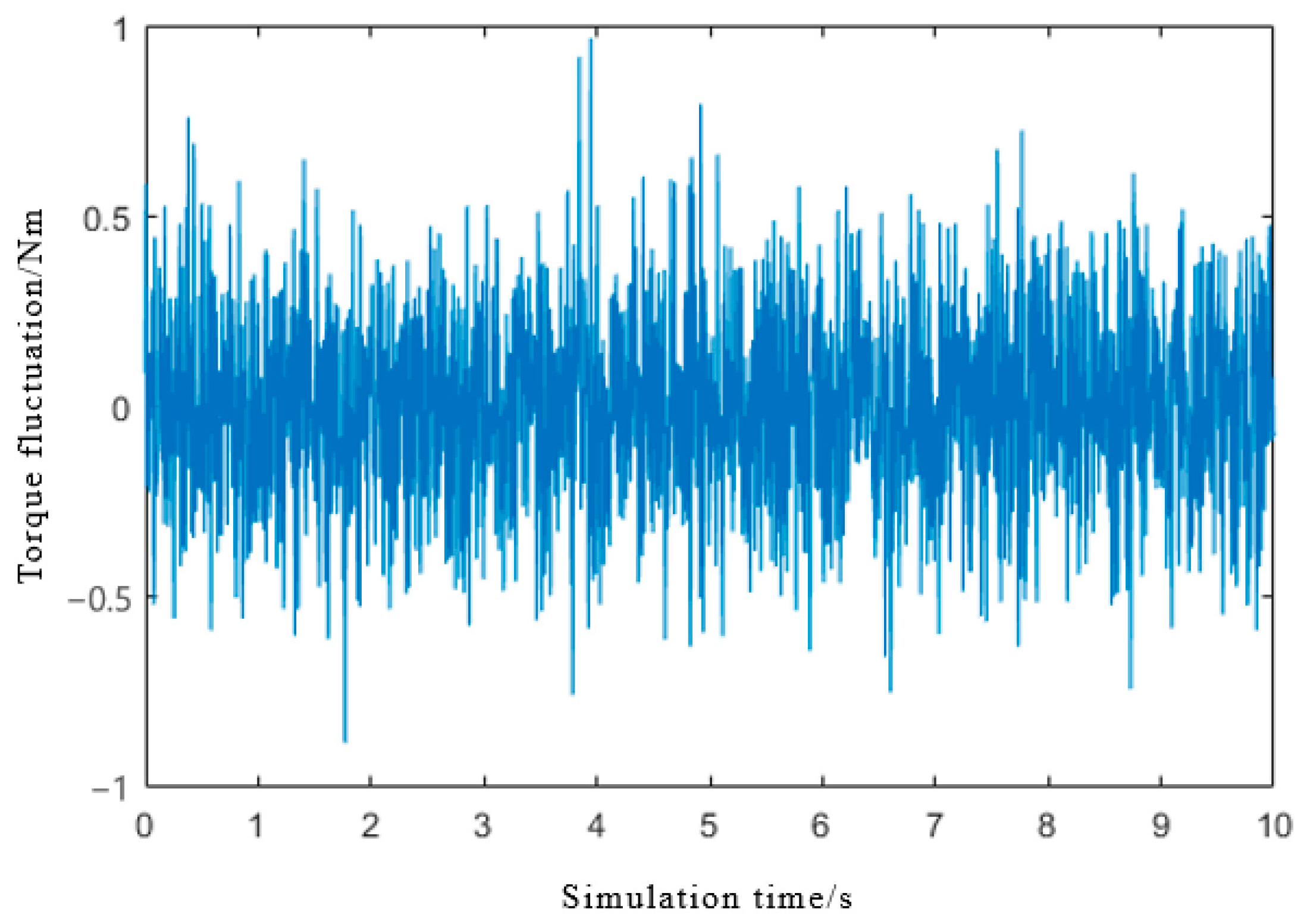
3.5. Influence of Motor Torque Fluctuation
3.6. Impact of Load Acceleration Interference
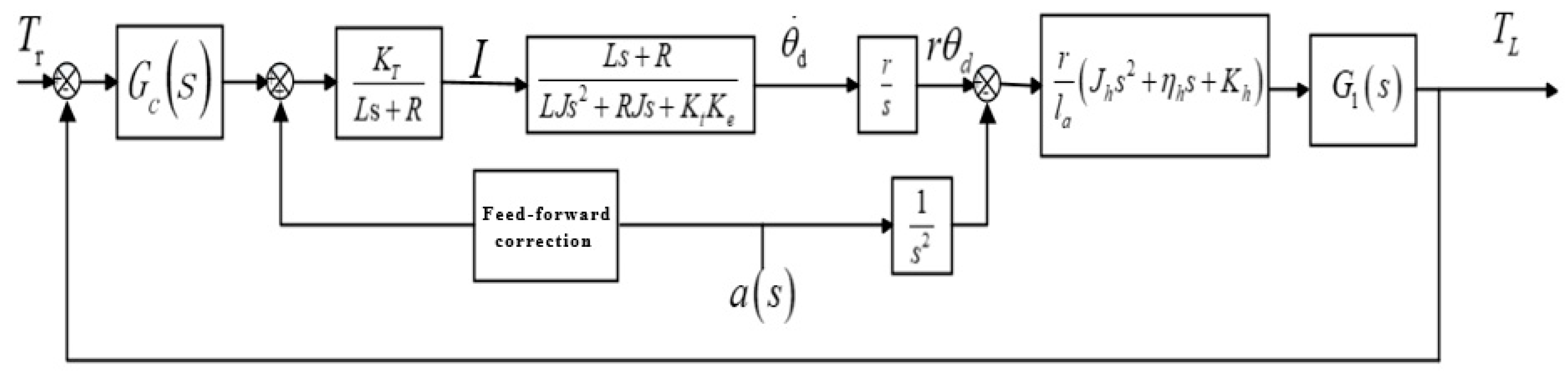
4. Controller Design of Constant-Tension System
4.1. Feed-Forward Compensation for Acceleration Interference
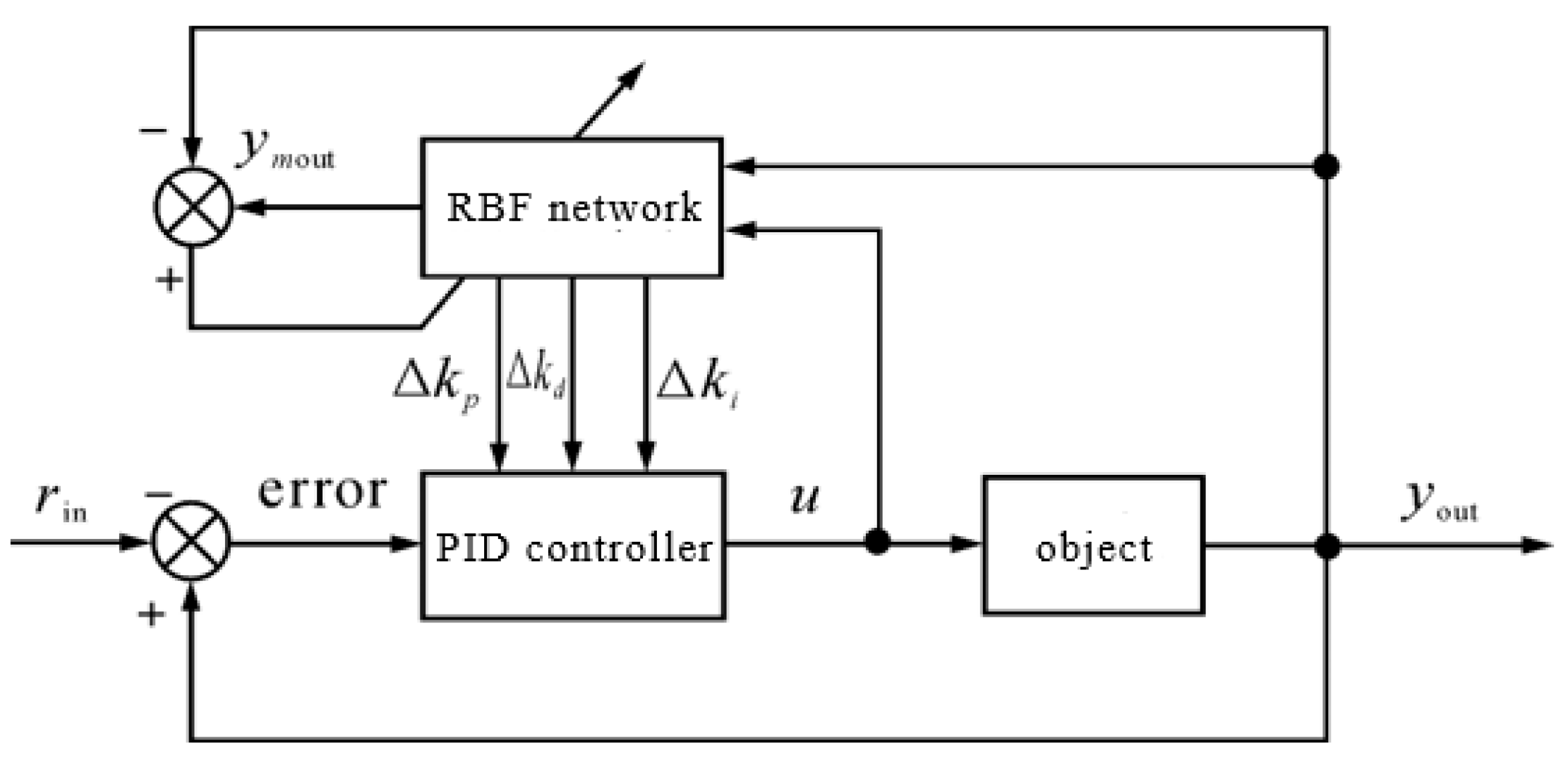
4.2. Adaptive PID Control Based on RBF Neural Network Identification
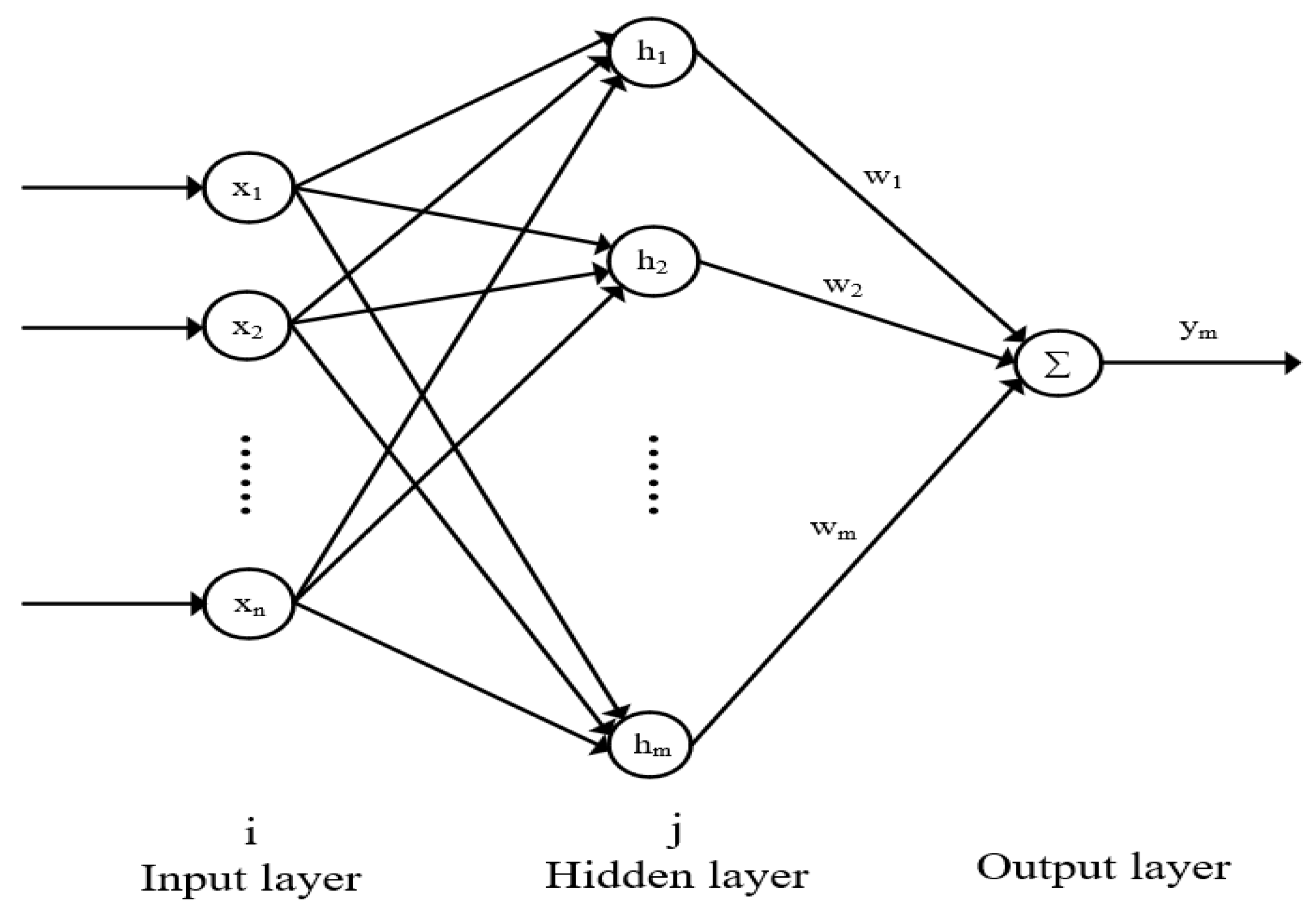
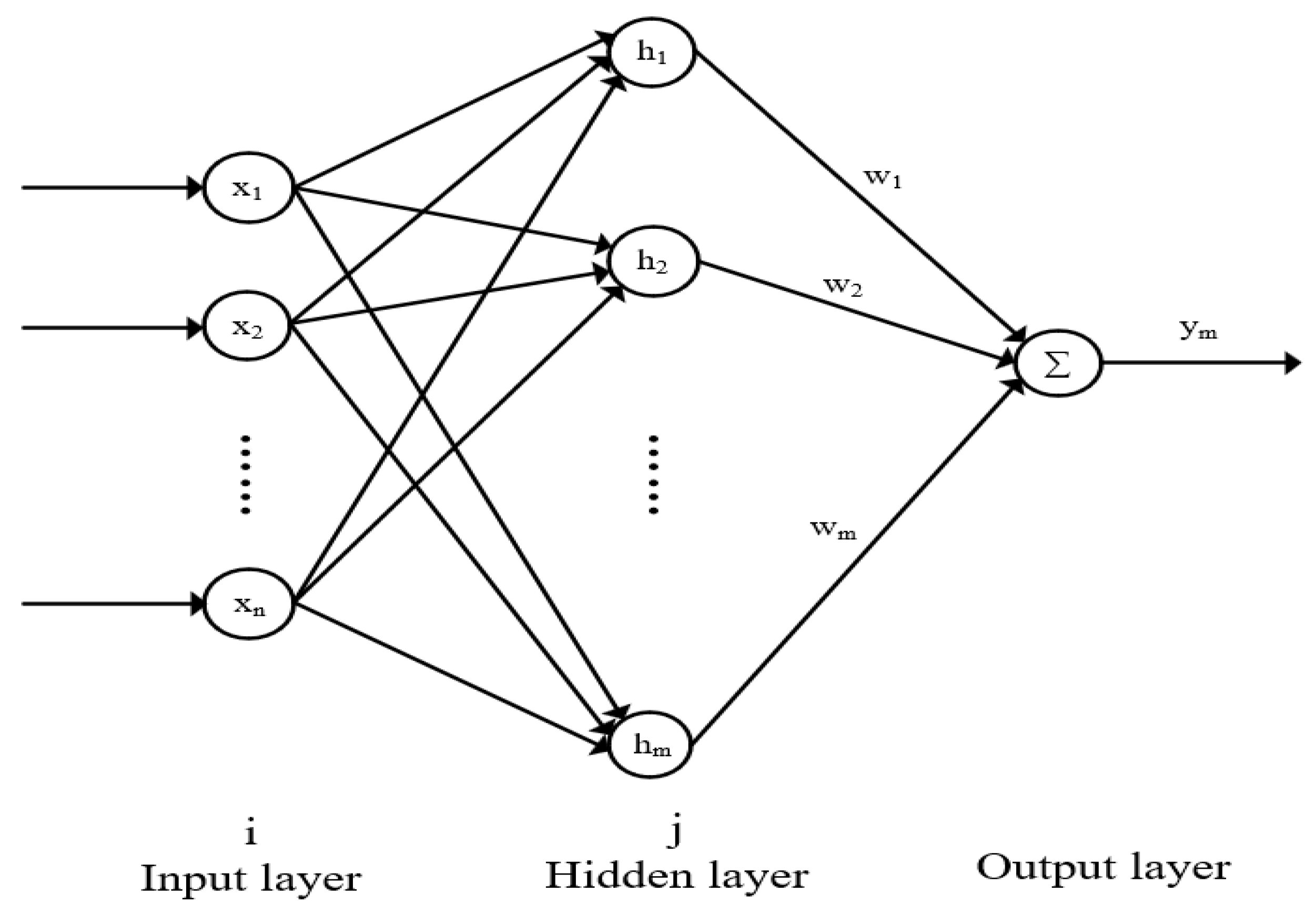
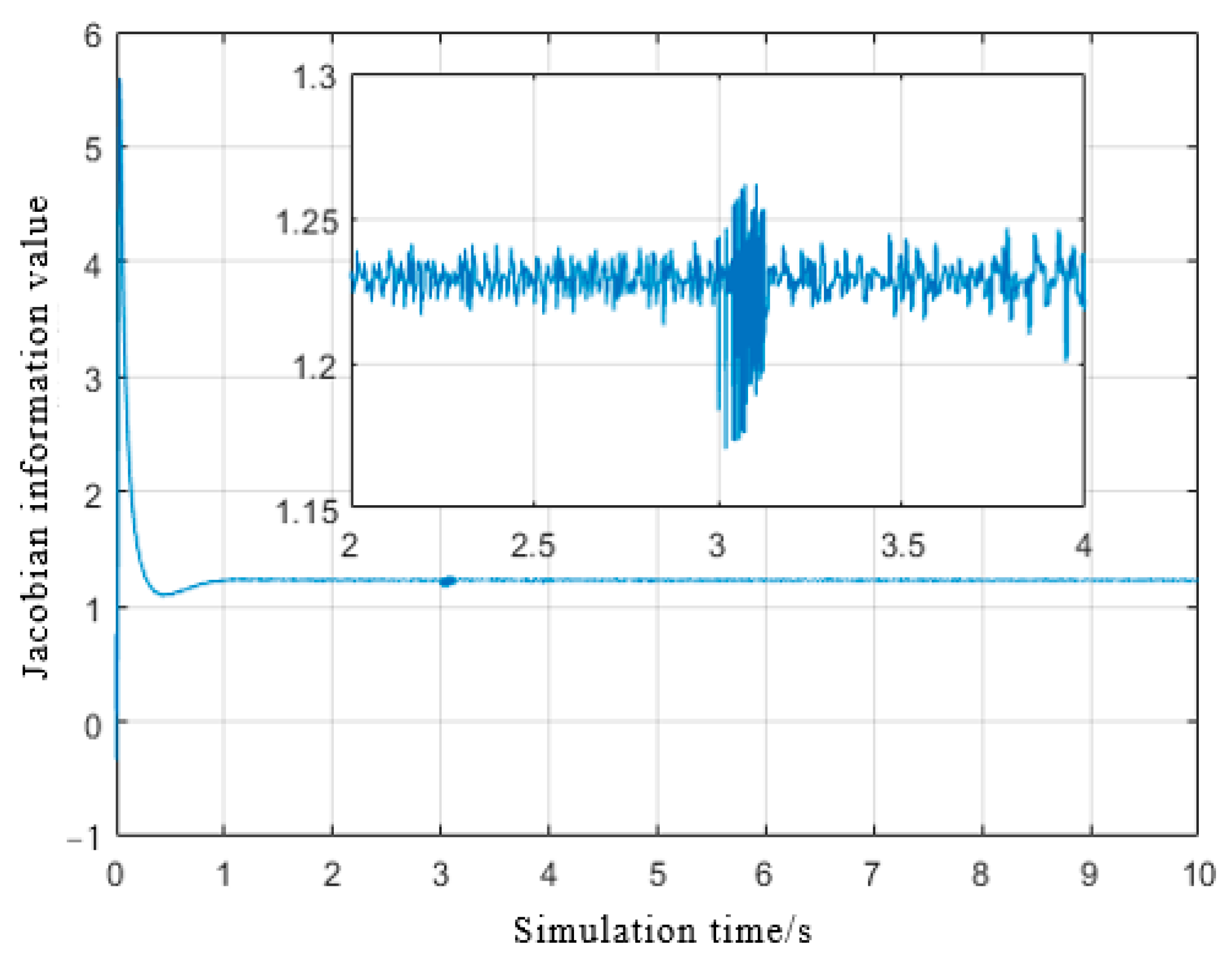
4.2.1. RBF Network Structure and Learning Algorithm
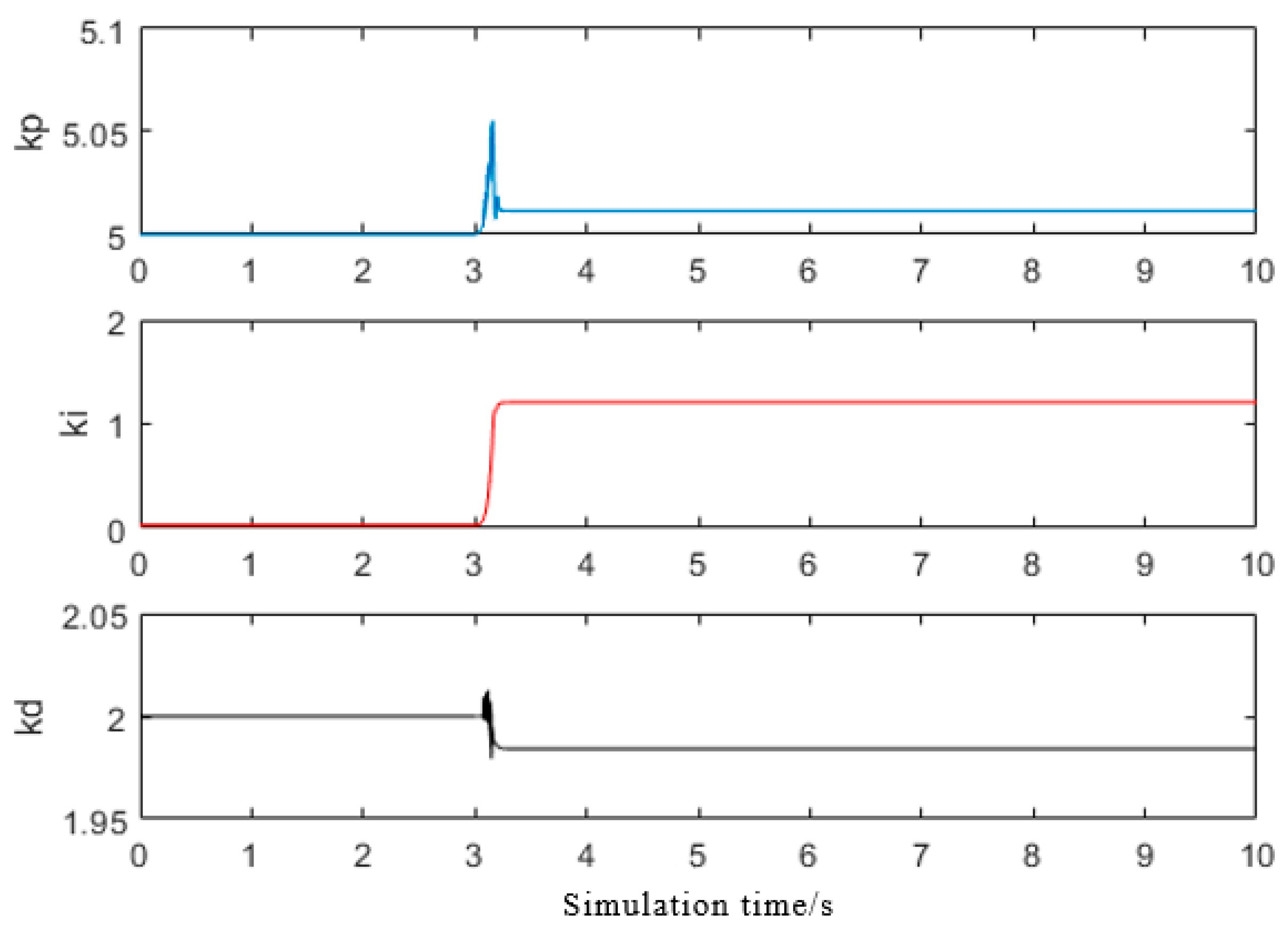
4.2.2. RBF Network PID Parameter Setting Principle
4.2.3. Initial Parameter Determination of Network Based on Ant Colony Algorithm
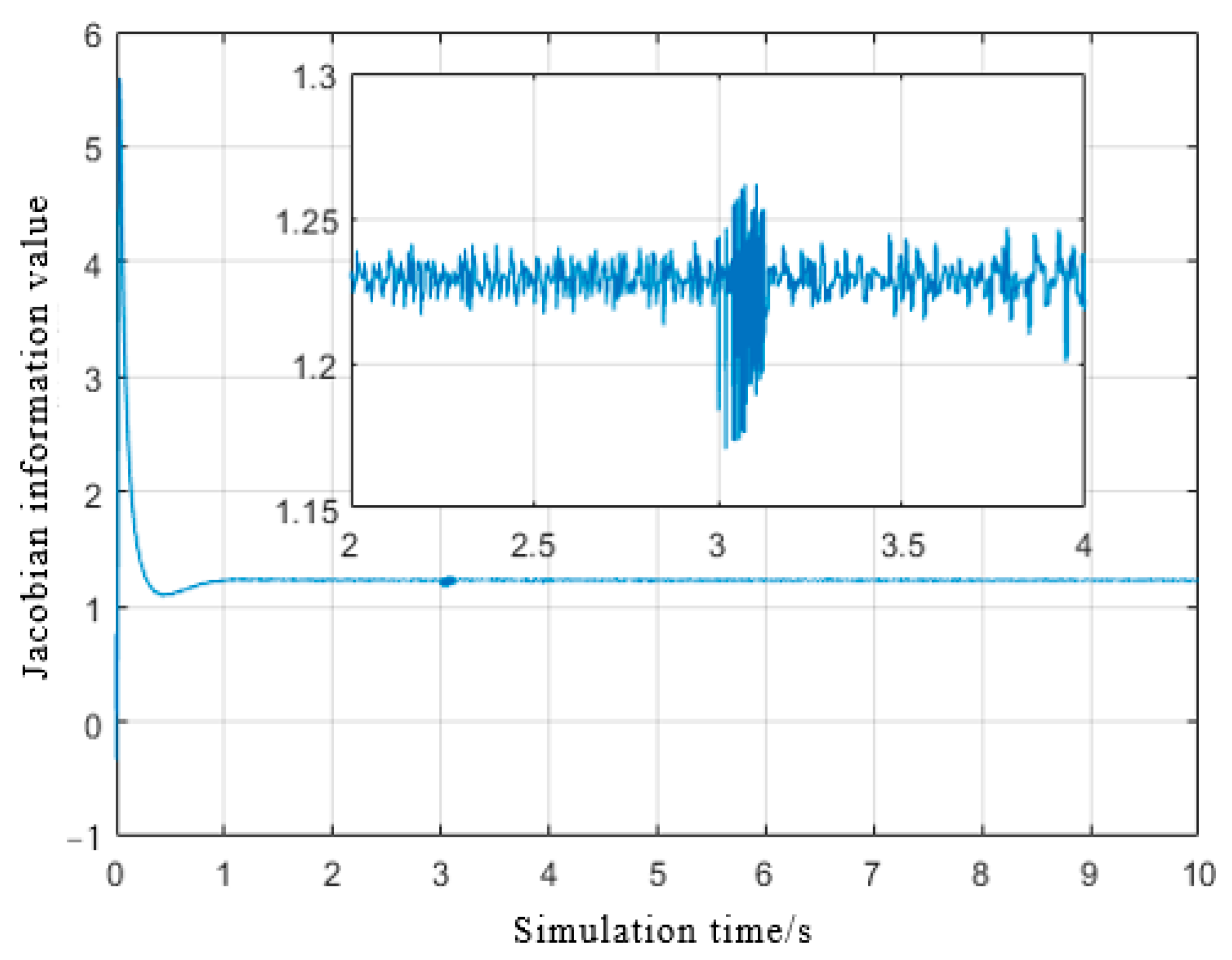
4.2.4. RBF Neural Network PID Control Simulation
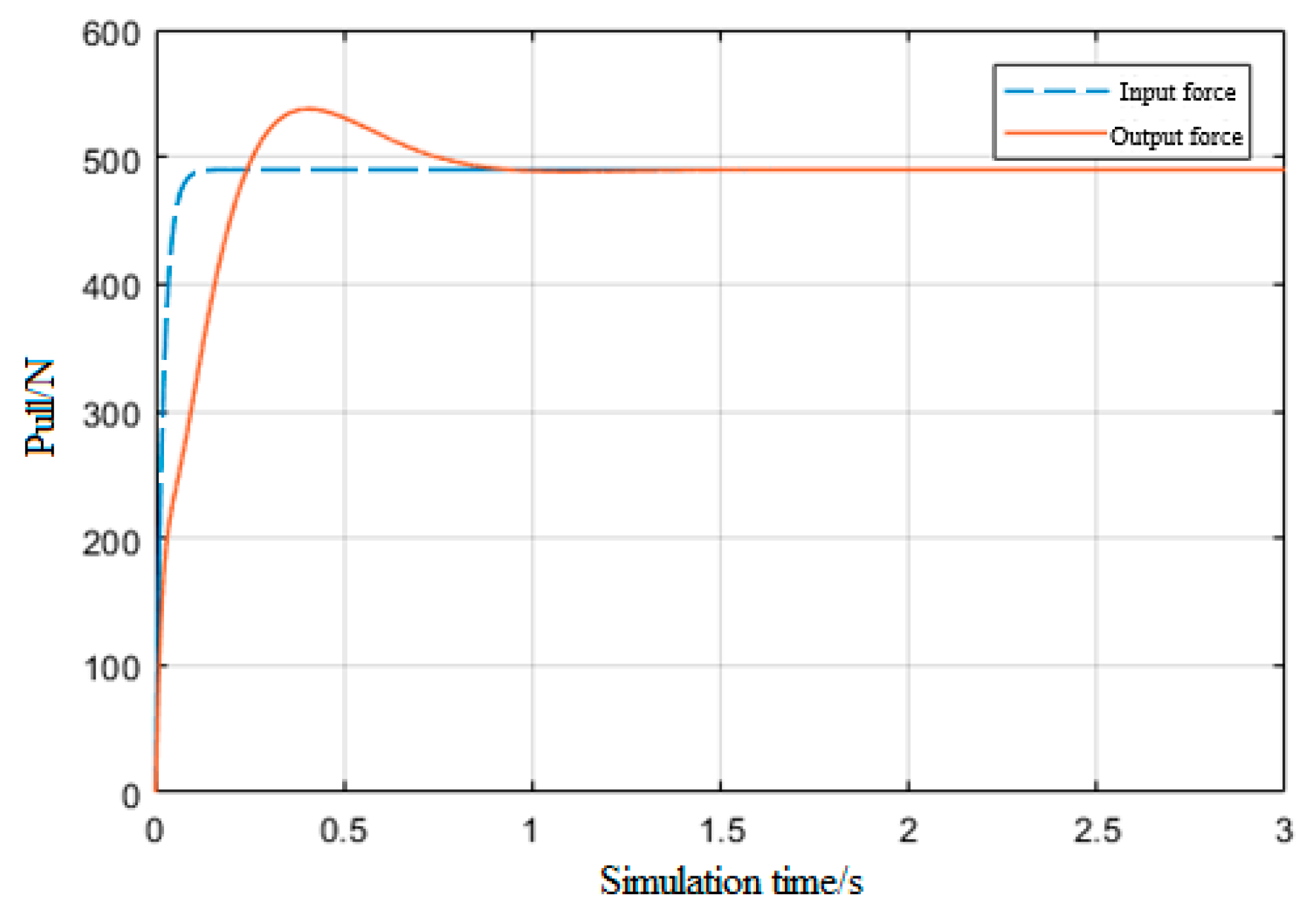
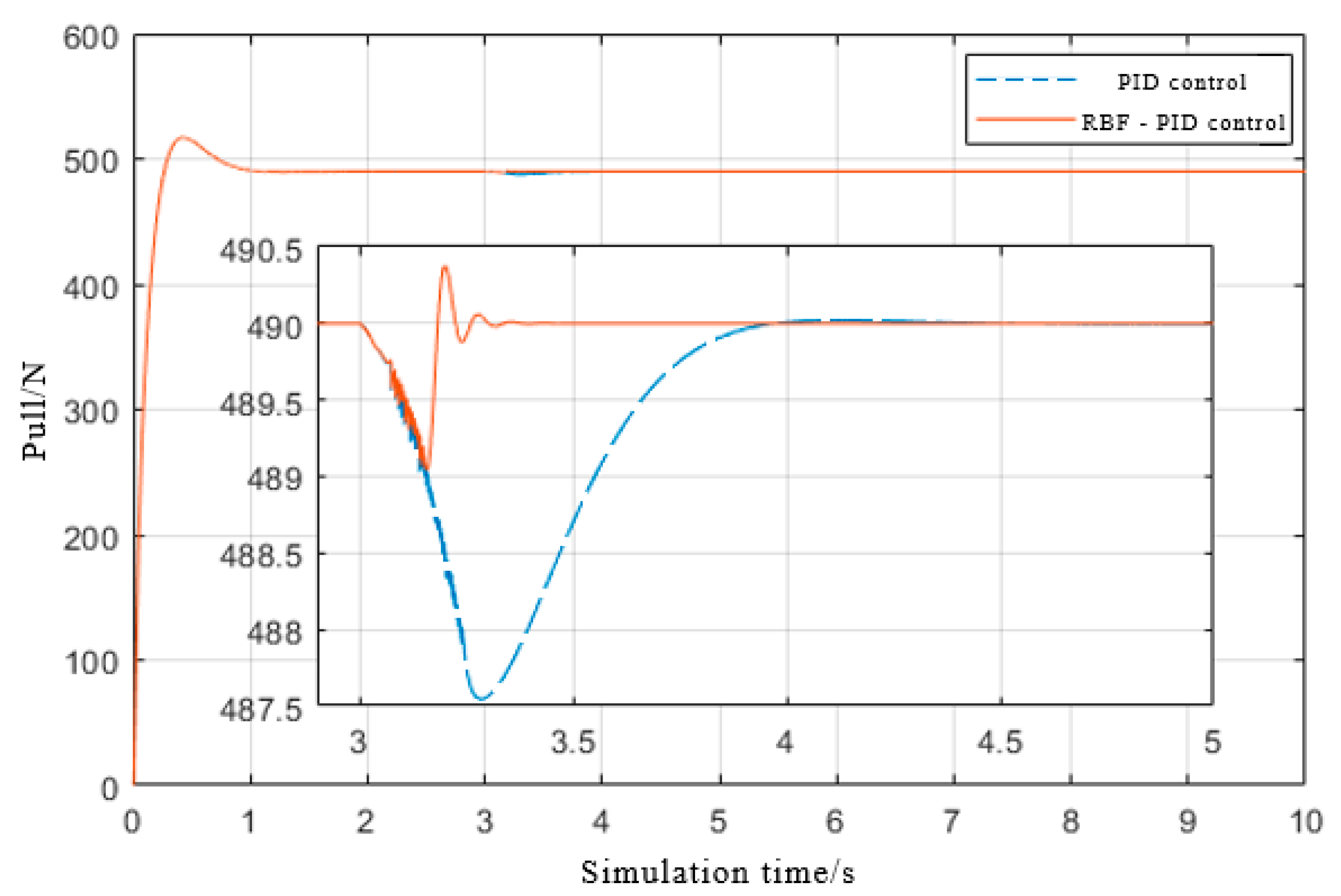
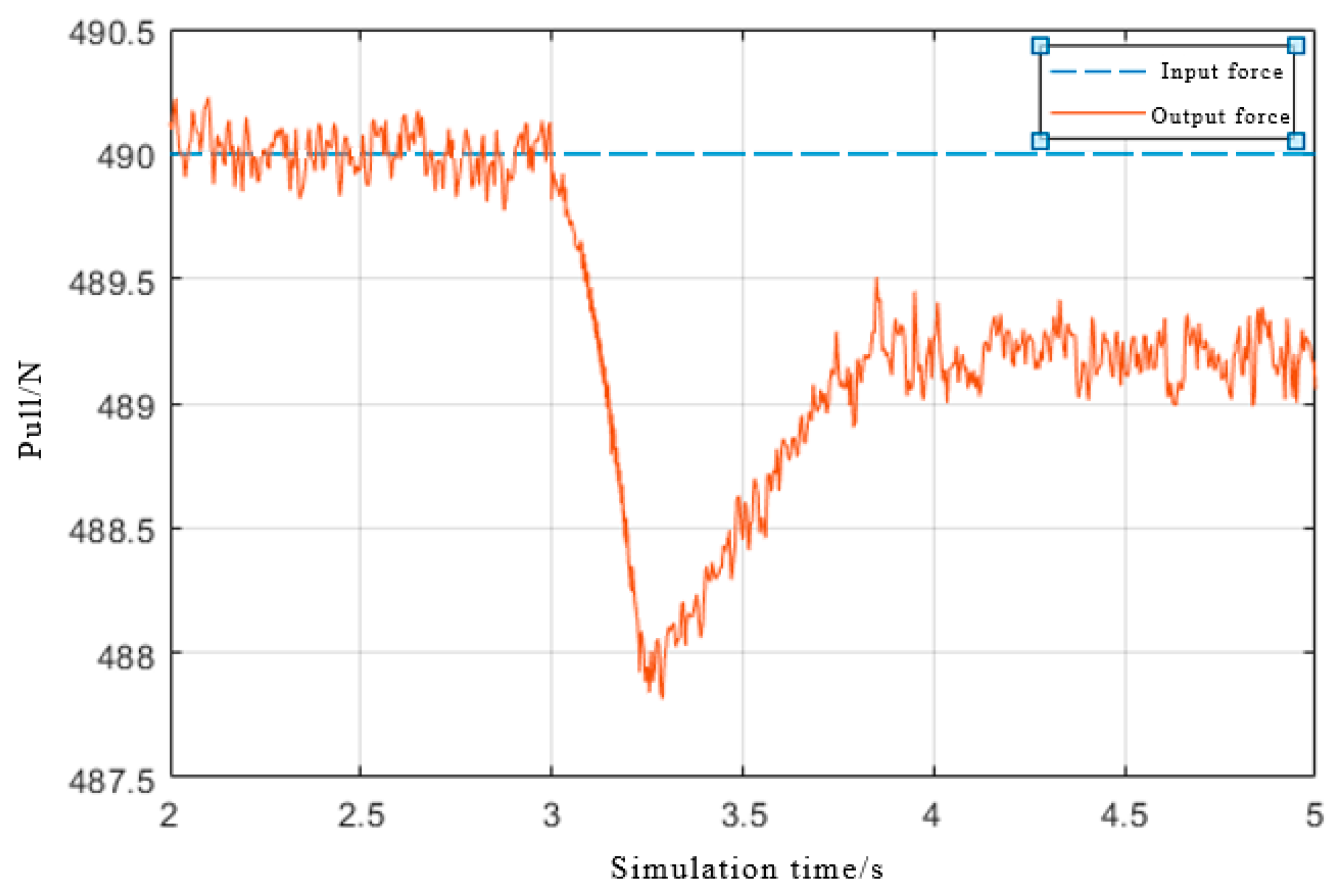
4.3. Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gao, H.; Niu, F.; Liu, Z. Suspended micro-low gravity environment simulation technology: Status quo and prospect. Acta Astronaut. Et Astronaut. Sin. 2021, 42, 523911. (In Chinese) [Google Scholar]
- Zhang, H.; Li, C.; You, J.; Zhang, X.; Wang, Y.; Chen, L.; Fu, Q.; Zhang, B.; Wang, Y. The Investigation of Plume-Regolith Interaction and Dust Dispersal during Chang’E-5 Descent Stage. Aerospace 2022, 9, 358. [Google Scholar] [CrossRef]
- Qi, N.; Sun, K.; Wang, Y.; Liu, Y.; Huo, M.; Yao, W.; Gao, P. Micro/Low Gravity Simulation and Experiment Technology for Spacecraft. J. Astronaut. 2020, 41, 770–779. (In Chinese) [Google Scholar]
- Callens, N.; Ventura-Traveset, J.; De Lophem, T.-L.; De Echazarreta, C.L.; Pletser, V.; Van Loon, J.J.W.A. ESA Parabolic Flights, Drop Tower and Centrifuge Opportunities for University Students. Microgravity Sci. Technol. 2010, 23, 181–189. [Google Scholar] [CrossRef]
- von Kampen, P.; Kaczmarczik, U.; Rath, H.J. The new Drop Tower catapult system. Acta Astronaut. 2006, 59, 278–283. [Google Scholar] [CrossRef]
- Urban, D. Drop tower workshop. In 29th American Society for Gravitational and Space Research; NTSR: Orlando, FL, USA, 2013. [Google Scholar]
- Liu, T.Y.; Wu, Q.P.; Sun, B.Q.; Han, F.T. Microgravity Level Measurement of the Beijing Drop Tower Using a Sensitive Accelerometer. Sci. Rep. 2016, 6, 31632. [Google Scholar] [CrossRef] [PubMed]
- Carr, C.E.; Bryan, N.C.; Saboda, K.N.; Bhattaru, S.A.; Ruvkun, G.; Zuber, M.T. Acceleration profiles and processing methods for parabolic flight. Npj Microgravity 2018, 4, 14. [Google Scholar] [CrossRef] [PubMed]
- Matsuzawa, T. Parabolic flight: Experiencing zero gravity to envisage the future of human evolution. Primates 2018, 59, 1–3. [Google Scholar] [CrossRef] [PubMed]
- Carignan, C.R.; Akin, D.L. The Reaction Stabilization of On-Orbit Robots. IEEE Control. Syst. Mag. 2000, 20, 19–33. [Google Scholar]
- Akin, D.; Ranniger, C.; DeLevie, M. Development and testing of an EVA simulation system for neutral buoyancy operations. In Proceedings of the Space Programs and Technologies Conference, Huntsville, AL, USA, 24–26 September 1996. [Google Scholar]
- Heard, W.L.; Lake, M.S. Neutral buoyancy evaluation of extravehicular activity assembly of a large precision reflector. J. Spacecr. Rocket. 1994, 31, 569–577. [Google Scholar] [CrossRef]
- Laryssa, P.; Lindsay, E.; Layi, O.; Marius, O.; Nara, K.; Aris, L. International Space Station Robotics: A Comparative Study of ERA, JEMRMS and MSS. In 7th ESA Workshop on Advanced Space Technologies for Robotics and Automation ‘ASTRA 2002’; ESTEC: Noordwijk, The Netherlands, 2002. [Google Scholar]
- Anderson, M.C.; Hasselman, T.K.; Pollock, T.C. Compensation for passive damping in a large amplitude microgravity suspension system. In Proceedings of the SPIE: Smart Structures and Materials 1997: Passive Damping and Isolation, San Diego, CA, USA, 9 May 1997; pp. 224–235. [Google Scholar]
- Valle, P. Reduced Gravity Testing of Robots (and Humans) Using the Active Response Gravity Offload System. In Proceedings of the International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017; NASA: Washington, DC, USA, 2017. [Google Scholar]
- Kapil, A.; Satish, B. Analysis of cogging torque reduction by increasing magnet edge inset in radial flux permanent magnet brushless DC motor. In Proceedings of the 2016 IEEE 1st International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 4–6 July 2016. [Google Scholar]
- Duan, M.; Jia, J.; Ito, T. Fast terminal sliding mode control based on speed and disturbance estimation for an active suspension gravity compensation system. Mech. Mach. Theory 2021, 155, 104073. [Google Scholar] [CrossRef]
- Rank, E. Application of Bayesian trained RBF networks to nonlinear time-series modeling. Signal Process. 2003, 83, 1393–1410. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Values |
|---|---|
| Swinging rod length | 130 |
| Length of ob section of the longitudinal rod lb | 200 |
| C point coordinates | |
| E point coordinates | |
| Length of the longitudinal rod lf, (mm) | 155.7 |
| The moment of inertia of the pendulum Ja, (kg·m2) | 0.02 |
| Damping coefficient η | 0.5 |
| Parameters | Values |
|---|---|
| Equivalent moment of inertia of motor shaft J, (kg·m2) | 0.04 |
| Motor armature inductance L, (H) | 3.8 × 10−3 |
| Motor armature resistance R, (ω) | 1.85 |
| Torque coefficient KT, (Nm/A) | 2.39 |
| Back emf coefficient Ke, (Vs/rad) | 2.43 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, J.; Zhang, Y.; Ju, C.; Xue, X.; Zhang, J. A New Force Control Method by Combining Traditional PID Control with Radial Basis Function Neural Network for a Spacecraft Low-Gravity Simulation System. Aerospace 2023, 10, 520. https://doi.org/10.3390/aerospace10060520
Cao J, Zhang Y, Ju C, Xue X, Zhang J. A New Force Control Method by Combining Traditional PID Control with Radial Basis Function Neural Network for a Spacecraft Low-Gravity Simulation System. Aerospace. 2023; 10(6):520. https://doi.org/10.3390/aerospace10060520
Chicago/Turabian StyleCao, Jian, Yang Zhang, Chuanyu Ju, Xinyi Xue, and Jiyuan Zhang. 2023. "A New Force Control Method by Combining Traditional PID Control with Radial Basis Function Neural Network for a Spacecraft Low-Gravity Simulation System" Aerospace 10, no. 6: 520. https://doi.org/10.3390/aerospace10060520
APA StyleCao, J., Zhang, Y., Ju, C., Xue, X., & Zhang, J. (2023). A New Force Control Method by Combining Traditional PID Control with Radial Basis Function Neural Network for a Spacecraft Low-Gravity Simulation System. Aerospace, 10(6), 520. https://doi.org/10.3390/aerospace10060520