1. Introduction
Solar sails stand apart from other forms of spacecraft propulsion that have been flown. By providing a large area with which to absorb and reflect photons from the Sun, they can achieve thrust without expending propellant. Although the thrust for typical sail designs is small, the continuous nature of this form of propulsion enables entirely new classes of trajectories. Missions have been proposed, for instance, based on a variety of non-Keplerian orbits, including pole-sitters and artificial Lagrange points [
1,
2]. Pole-sitters may be of considerable commercial and scientific interest for telecommunications and Earth remote-sensing, while artificial Lagrange points closer to the Sun than L1 could improve warning times for threatening space weather events [
2,
3].
Solar sails can also be an enhancing technology for conventional missions. They have featured prominently in work on solar–polar mission designs, as they can achieve the necessary inclination change without the Jovian gravity assist that drove the long-orbit period of the Ulysses mission [
4,
5,
6,
7,
8]. Since the thrust of solar sails scales with the inverse square law, they are particularly advantageous for transfers and stationkeeping within the inner solar system. For example, they can be used to force sun-synchronous orbits at Mercury, where such orbits do not exist naturally yet are useful for remote sensing [
9]. Trajectories that pass close to the Sun to harness the increased solar radiation pressure for achieving escape velocity have also been studied as a means of rapid transport to the outer solar system, heliopause, and interstellar space [
2,
10,
11,
12].
All of these potential missions rely on adjusting the orientation of the sail to control the magnitude and direction of the solar radiation pressure [
13]. This can be especially challenging for solar sails, since the sail is normally made of a large area of lightweight material to maximize the acceleration of the spacecraft. Demonstrating attitude control with a solar sail is therefore a key step in advancing the technology readiness level (TRL) of the technology.
The first step in this respect was taken by JAXA’s IKAROS spacecraft [
14]. The experiment used an array of reflectivity control devices to reverse the drift in the spacecraft’s spin axis by 0.5 degrees in 24 h while en route to Venus in 2010. The acceleration provided by the sail was also measured via ground-based Doppler and showed a delta-V of approximately 100 m/s delivered during the first six months.
IKAROS had a wet mass of 310 kg and a sail area of 200 m
[
14]. This resulted in a sail loading of 1467 g·m
. The next solar sail to fly was NASA’s NanoSail D2 in 2011 [
15]. Though uncontrolled and deployed on an Earth orbit too low to observe the effects of solar radiation pressure due to atmospheric drag, the combination of a 10 m
sail deployed from a 4 kg 3U CubeSat bus gave the spacecraft a sail loading of 400 g·m
. Sail loading is inversely related to metrics such as lightness number or characteristic acceleration, which broadly define the trajectory capabilities of the sail [
1].
The compact nature of CubeSats therefore brings both advantages in sail performance and challenges in miniaturizing the attitude determination and control system (ADCS) to control the sail. Advancing the TRL of CubeSat solar sails was one of the main goals of The Planetary Society’s LightSail program, which began crowdfunding the development of a pair of Earth-orbiting 3U solar sails in 2010. These became LightSail 1 and LightSail 2 (LS2).
LigthSail 1 flew in 2015 and demonstrated successful deployment and imaging of its 32 m
sail [
16]. Like NanoSail D2, it was uncontrolled and launched into a low orbit (356 × 705 km) that decayed quickly after deployment of the sail. The goal of LightSail 2 was to demonstrate controlled solar sailing using a CubeSat. This has two aspects: demonstrating successful attitude control of the sail, and demonstrating that the attitude control has the expected effect on the orbit due to solar radiation pressure.
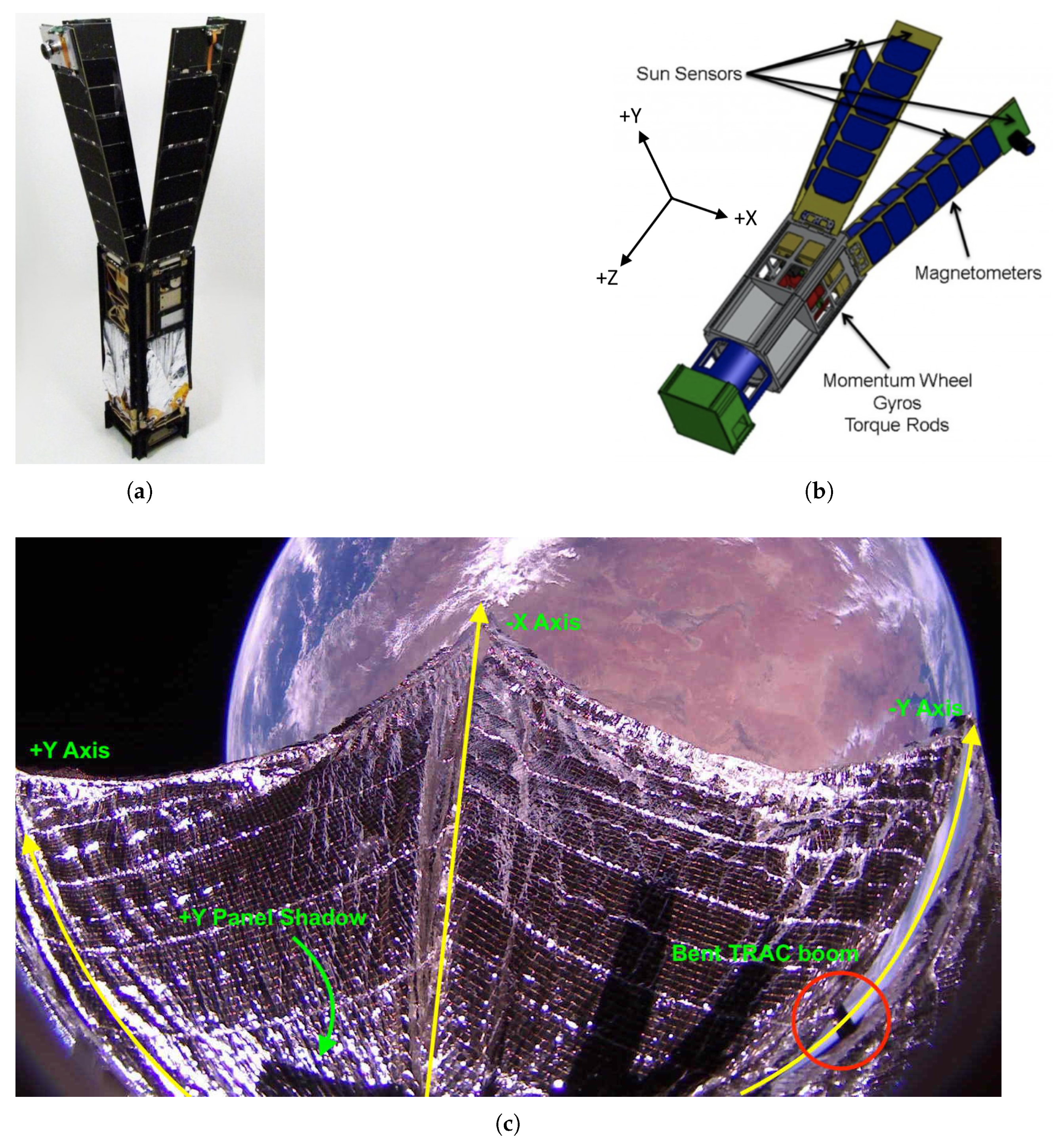
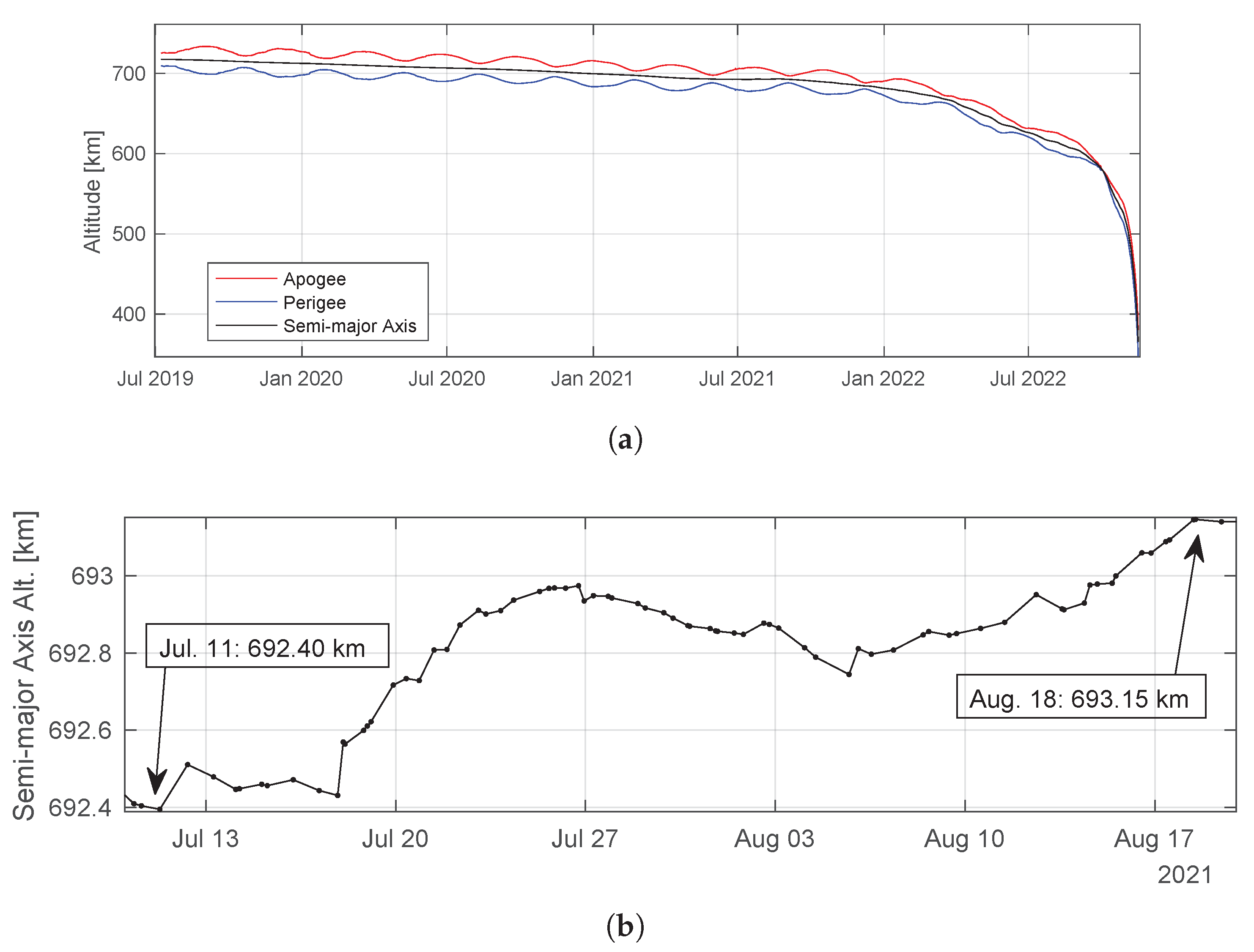
LS2 was launched into a 709 × 726 km altitude 24 degree inclination orbit on 25 June 2019. Its sail was deployed on 23 July 2019, and the spacecraft operated continuously until its eventual deorbit on 16–17 November 2022. The mission succeeded in demonstrating controlled solar sailing using a CubeSat. By reorienting the sail by 90 degrees twice each orbit, LS2 harnessed solar radiation pressure to slow, and sometimes even reverse, its orbit decay due to atmospheric drag.
Previous publications about the mission have focused on the design and early operations of the spacecraft [
17,
18,
19]. However, continuing refinements to the spacecraft’s ADCS improved attitude control performance and culminated in a period of sustained orbit energy increases during the summer of 2021. The purpose of this paper is to discuss these improvements and assess the ADCS and solar sailing performance over the full mission.
Section 2 reviews the design and solar sailing concept of operations for LS2.
Section 3 analyzes ADCS performance.
Section 4 discusses the orbit evolution over the mission and the impact of sail control. Finally,
Section 5 assesses the final week of operations to determine if the sail may have collapsed prior to re-entry. The results are relevant not only to future solar sails, but also to deployable deorbit devices that are becoming an increasingly popular means of space debris mitigation.
3. Attitude Performance
3.1. Methods of Assessment
LS2’s onboard attitude filter produced a quaternion estimate that was available in regularly downlinked telemetry. This quaternion represents a body frame to J2000 Earth Mean Equator rotation and is the best estimate for the spacecraft’s attitude at each telemetry point. Also downlinked in the telemetry were the raw measurement values from each sensor and the latitude, longitude, and altitude of the spacecraft as determined by the onboard TLE propagator. The latter allows the inertial velocity of the spacecraft relative to the Sun to be reconstructed to determine at each telemetry point whether the “On” or “Off” sail orientation was being commanded. Note that it is important to derive these commands from positions calculated by the onboard TLE propagator, since this is what the spacecraft used when determining whether to command either the “On” or “Off” attitude. Spacecraft clock errors or stale TLEs could sometimes lead to discrepancies in spacecraft position compared to TLEs propagated on the ground.
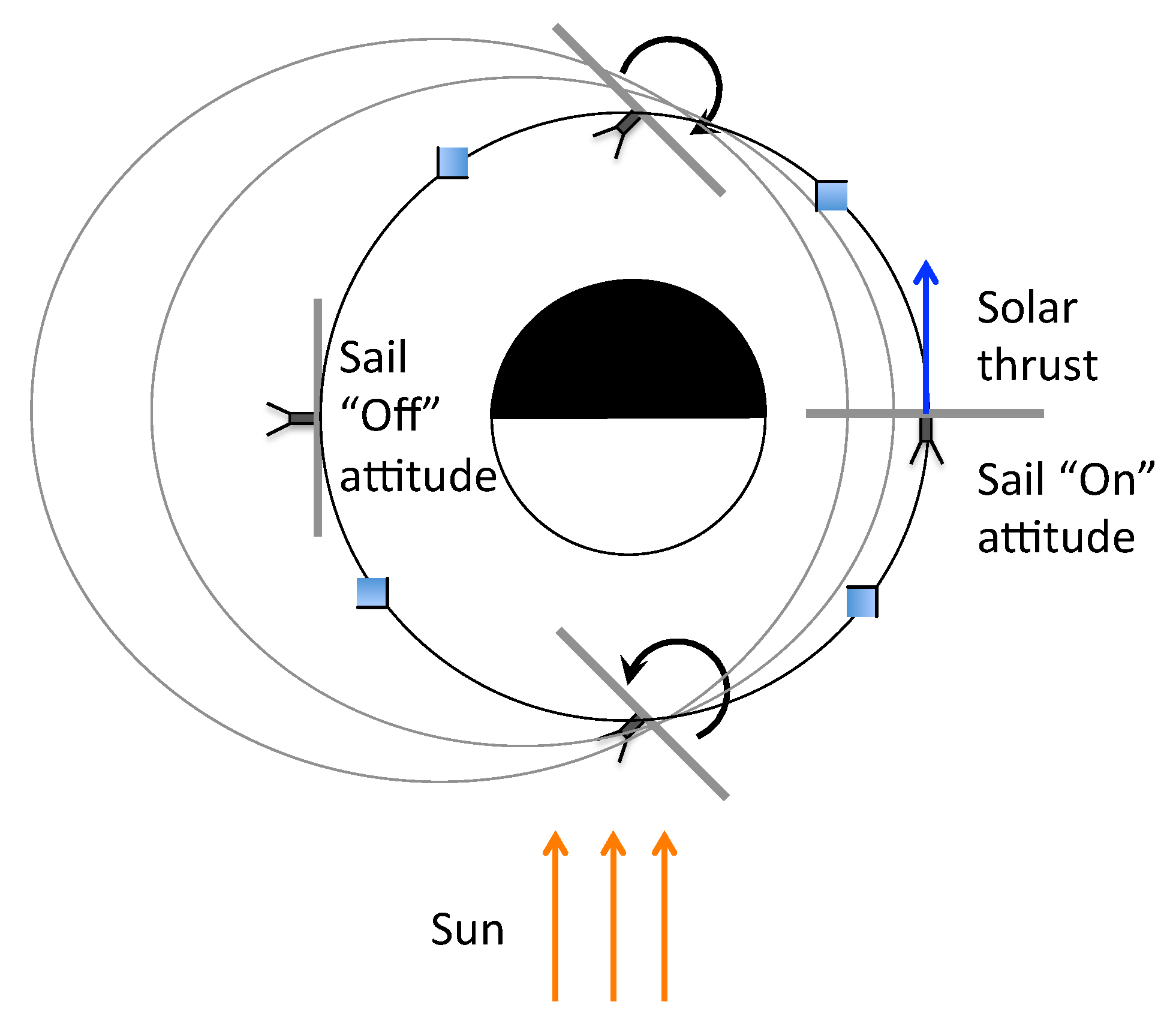
Once the sail command is reconstructed, it can be compared to the onboard quaternion estimate to determine the pointing accuracy of the spacecraft. The results were typically assessed using plots such as those shown in
Figure 3. The plots show the actual orientation of the spacecraft compared against the On–Off commands at five select points in the mission. The first plot
Figure 3a shows the slew performance during spacecraft commissioning before the solar sail was deployed. The next
Figure 3b exemplifies how recognizable On–Off control was initially intermittent but improved as the momentum management strategy was refined. By mid-2020 (
Figure 3c), an accumulating bias in the PIB gyros disrupted control. An in-flight recalibration strategy was developed in 2021 and restored sail control, ultimately leading to improved solar sailing and consistent increases in the semi-major axis (
Figure 3d,e).
Since the pointing accuracy assessment is based on the spacecraft’s own attitude estimate, it is important to assess the quality of that estimate. In theory, the Kalman filter provides a state covariance matrix alongside the estimated quaternion that is fit for this purpose, but it is based on assumptions of wide-sense stationary stochastics with mean zero white noise for measurement errors. In practice, the actual noise of the magnetometers was difficult to determine and likely varied with time due to interference from currents in the solar panels. Both the mainboard and PIB gyros were also corrupted by a time-varying bias that became increasingly problematic over the mission.
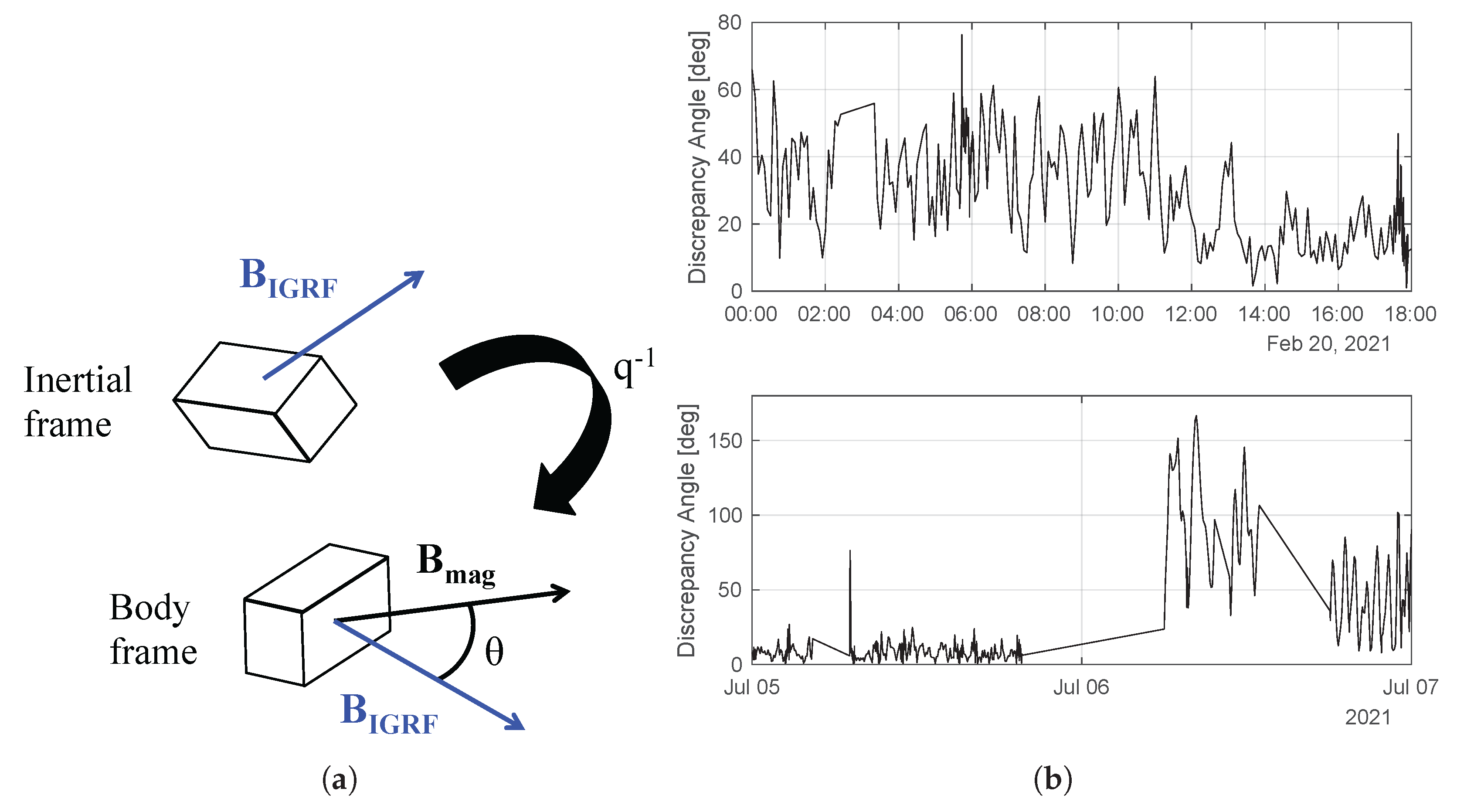
We therefore developed an alternative “quaternion consistency check” with which to monitor the reliability of the onboard attitude. The check verifies that the estimated quaternion can reproduce the observed magnetic field by using the quaternion to rotate the IGRF magnetic field vector queried at the spacecraft’s position into the spacecraft body frame. The angular error between the transformed IGRF vector and the average of both magnetometer measurements provides a crude but independent estimate of the attitude estimation error. While an angular error of zero does not guarantee robust attitude knowledge (errors in rotation about the magnetic field vector are not detectable), the check was nonetheless extremely useful in detecting periods of degraded attitude knowledge due to the IGRF being queried at an incorrect position.
Figure 4 depicts a schematic of the consistency check alongside plots showing the discrepancy angle during the initial recalibration of the PIB gyros and later during an anomaly. The anomaly resulted from the flight computer running out of memory, which halted the onboard orbit propagator and caused a loss of attitude knowledge.
One final method by which ADCS performance was assessed was by detecting and diagnosing anomalies. Initially, this was done by manually inspecting telemetry or by aggregating data into derived signals such as the quaternion consistency check. Examples of some common anomalies were stuck values in one of the magnetometers, spacecraft clock resets, cyclic computer resets due to corrupted telemetry files, and shadowing of the solar panels by the sail. Beginning in 2020, we developed a machine learning model that was pre-trained on LS2’s ADCS simulator and deployed as a ground tool to both detect and diagnose anomalies in LS2 telemetry. The system proved useful in identifying anomalies that may have otherwise gone unnoticed [
20].
3.2. Performance over the Mission
Figure 3 and
Figure 4 provide a look at attitude knowledge and control performance at a few select points in the mission. To discuss trends over the entire mission,
Figure 5 and
Figure 6 display distributions for the quaternion discrepancy and pointing error month by month. We discuss the history of LS2’s attitude knowledge first.
3.2.1. Attitude Knowledge
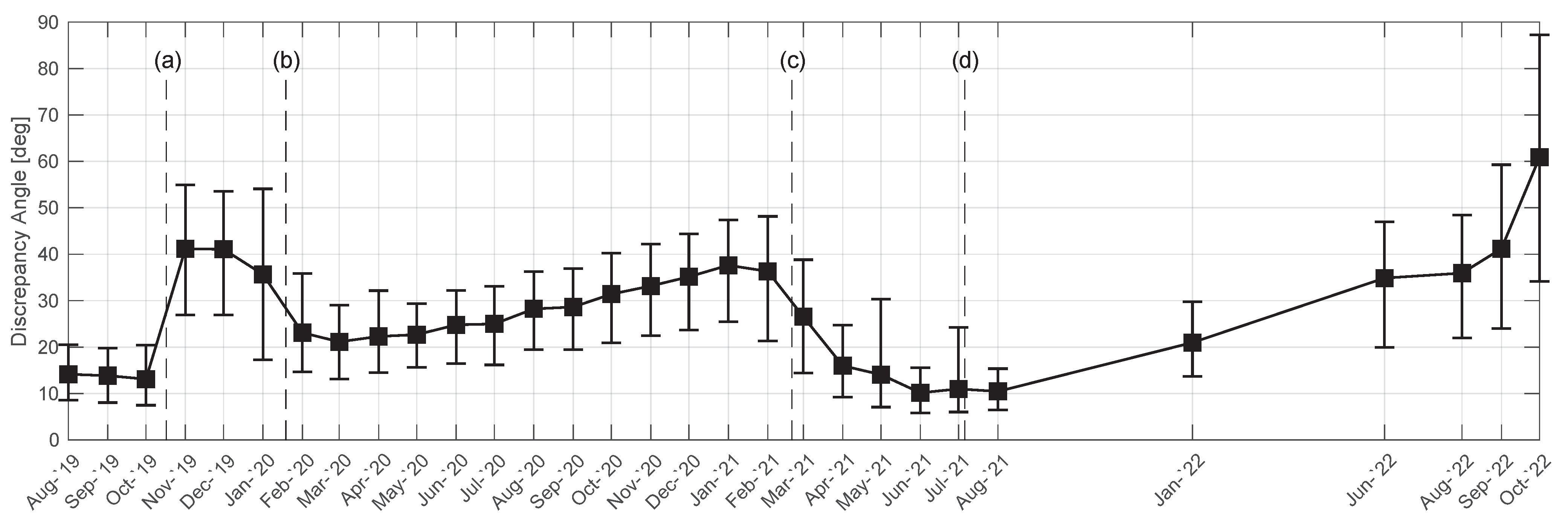
Figure 5 calculates the quaternion discrepancy for each 5-min telemetry sample from ADCS mode 2 in a given month and plots the median value along with error bars extending to the 20th and 80th percentiles. Each point therefore represents the distribution in attitude knowledge error for that month. Using the 20th and 80th percentiles helps filter out transient spikes, such as those following momentum desaturation events while the attitude filter re-converges. In some months not enough telemetry was downlinked to report reliable statistics. This was particularly true towards the end of the mission when the reduced availability of spare parts for tracking equipment due to the COVID-19 pandemic led to less consistent communication with the spacecraft. Months for which telemetry covers less than 15% of the month (about 4.5 days) are thus omitted from the plot.
Beginning on the left-hand side in August 2019,
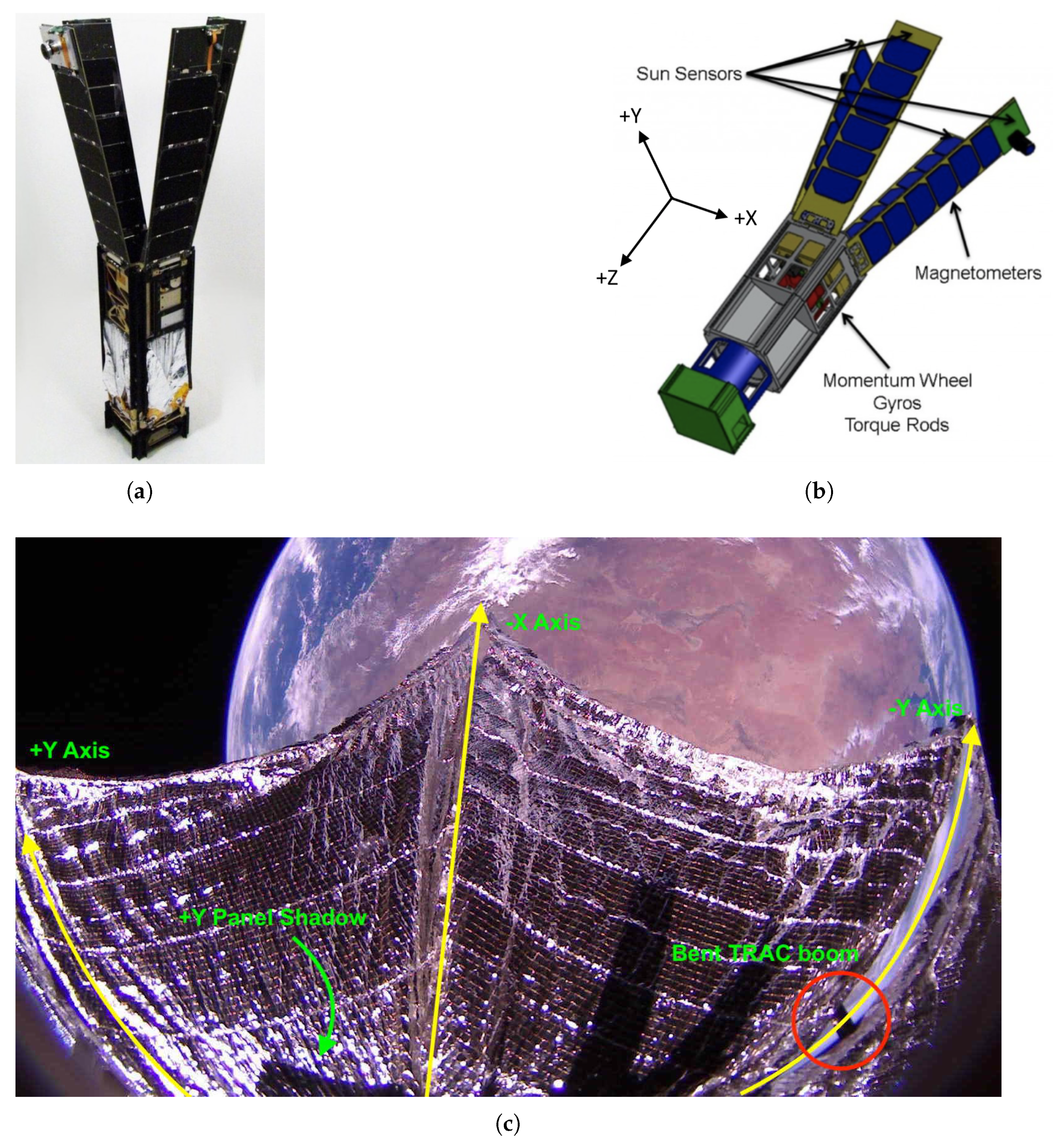
Figure 5 shows how attitude knowledge error was consistent at about 15 deg for the first several months of the mission. During these months, it was discovered that both the +Y sun sensor and magnetometer were behaving anomalously [
17]. The anomalous deployment of the +Y solar panel was unknown at this time, so the sensors were simply passivated so as not to corrupt the attitude estimate. On 17 October 2019, at annotation (a) in the plot, LS2 encountered the overloaded memory anomaly for the first time. This anomaly occurred several times during the mission, often because interruptions to regular communication delayed uplinking the commands to free memory. When this anomaly manifested, it caused a complete loss of attitude knowledge due to crashing the onboard TLE propagator. Resolving the anomaly required re-uplinking several critical files, one of which included the passivation instruction for the +Y sensors. The first time this anomaly was encountered, an earlier version of that file that did not include the passivation was uplinked, causing the +Y sensors to be ingested into the attitude filter with incorrect sensor-frame-to-body-frame rotation matrices. This was the cause of the degraded attitude performance throughout November and December 2019.
In January 2020, images such as
Figure 1c revealed the anomalous deployment angle of the +Y solar panel. Further analysis refined the deployment angle, and the rotation matrices for the +Y sensors were updated, allowing them to be correctly incorporated into the attitude estimate following annotation (b). This is reflected in the improved attitude knowledge for January and February 2020.
Over the next year, attitude knowledge slowly degraded once again. By February 2021, the cause of this was isolated to an accumulating bias in the PIB gyros, and a recalibration strategy was implemented (see
Section 3.3). This was an iterative process. Beginning at point (c) in the plot, a series of recalibrations restored the level of quaternion discrepancy to slightly better than the beginning of the mission. At point (d), the memory overload anomaly occured once again but was quickly resolved.
Over the following months until the end of the mission, tracking station difficulties greatly reduced the amount of telemetry being downlinked. This made further recalibrations of the PIB gyros difficult. As a result, the attitude knowledge degraded at a rate similar to 2020.
3.2.2. Sailing Performance
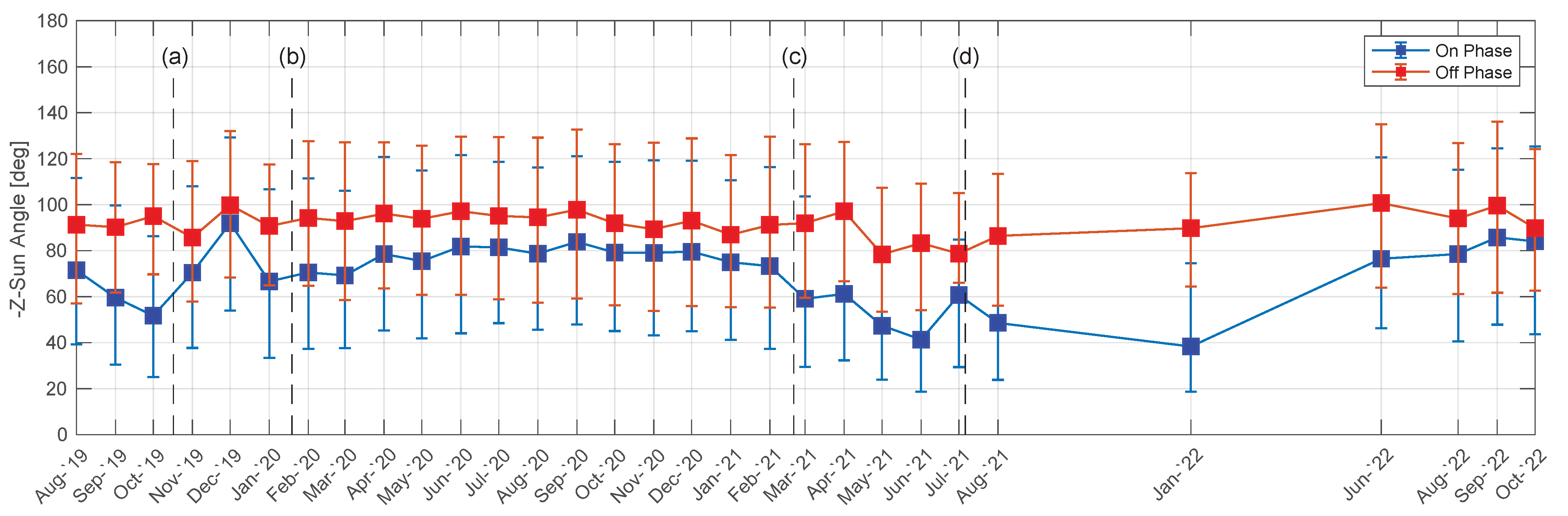
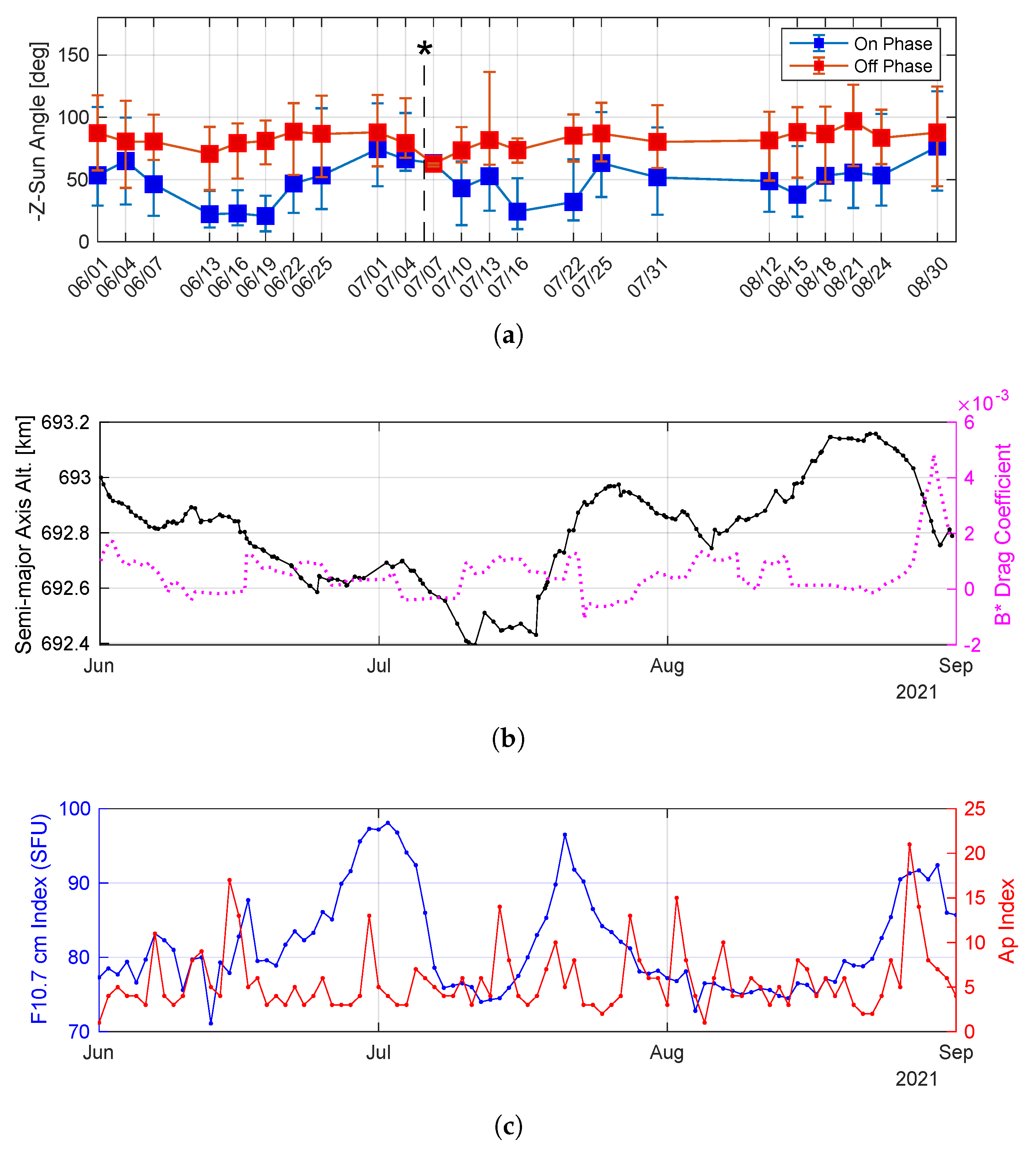
Figure 6 shows the month-to-month solar sail control. Similar to
Figure 5, the plot collects the 20th–80th percentile range for the attitude pointing in each month. The angle between the spacecraft −Z axis and the Sun is plotted separately for the On and Off phases of the control strategy. Recall that the On phase commands a −Z-Sun angle of 0 deg, while the Off phase commands 90 deg. The distance between the distributions for the On and Off angles in each month provides a measure of how well LS2 is following this strategy.
The control performance generally mirrors the trend in attitude knowledge seen in
Figure 5. Performance improved initially as control gains and the momentum management strategy were refined, but degraded between points (a) and (b) due to poor attitude knowledge. Recognizable On–Off slews were intermittent in 2020 before disappearing altogether due to accumulating biases on the gyros. The recalibration of the gyros and the resulting improvement in attitude knowledge in 2021 at point (c) restored successful On–Off control. Additional recalibrations improved performance further throughout the spring and summer of 2021 and provided the best sailing of the mission. An overloaded memory briefly interrupted this period in early July but was resolved within several days. This is the cause of the brief spike in On-phase pointing error near point (d). Excellent control performance followed and persisted until at least January 2022. However, the subsequent slow degradation of attitude knowledge meant that this was one of the last periods of recognizable On–Off slewing. By the last two months before deorbit, LS2 was essentially tumbling freely.
A notable feature of the plot is that the median Off-phase pointing remains close to 90 deg even when attitude knowledge is poor, while the On-phase performance varies significantly throughout the mission. This is a reflection of the different pointing objectives. For the On-phase, only a single attitude points the -Z spacecraft axis towards the Sun, whereas for the Off-phase, an angle of 90 deg can be satisfied by any rotation about the Sun vector that provides = 0. A better way to assess the Off-phase performance is to consider the narrowness of the distribution about a 90 deg pointing angle. In months such as January 2022, the 20th–80th percentile range is much smaller—about 90 deg—than it is for months with poor sailing, such as September 2020.
3.3. On-Orbit Gyro Recalibration
Key to LS2’s successful solar sailing during its extended mission was the recalibration of the primary gyros. By early 2021, both attitude knowledge and control performance were poor, leaving the satellite in an essentially uncontrollable attitude similar to
Figure 3c. A simple visual inspection of PIB gyro telemetry by this time showed that the X-rotation rates were noticeably biased towards positive rates. This, along with data from the diagnosis tool, led us to hypothesize that the X axis and possibly other PIB gyros had accumulated significant bias.
In February 2021, we began a campaign of estimating these biases by cross-calibrating PIB rates against rates derived from the magnetometers. During periods of 5 s telemetry, the spacecraft rotation rate is essentially constant from one time step to the next. The angular rate can therefore be estimated from successive magnetometer measurements in the spacecraft body frame:
Equation (
1) calculates the angle traversed by the measured magnetic field vector
in the body frame between time steps k and k
. Equation (
2) computes the axis of that rotation. Equation (
3) combines these into the angular rate vector of the body frame with respect to the inertial frame.
Although rates derived in this manner are too noisy to use for attitude control directly, over enough data points, they can provide a meaningful comparison against the PIB measurements. We also averaged rates derived independently from the +X and +Y magnetometers to compare against the rate determined from the PIB gyros at each time step.
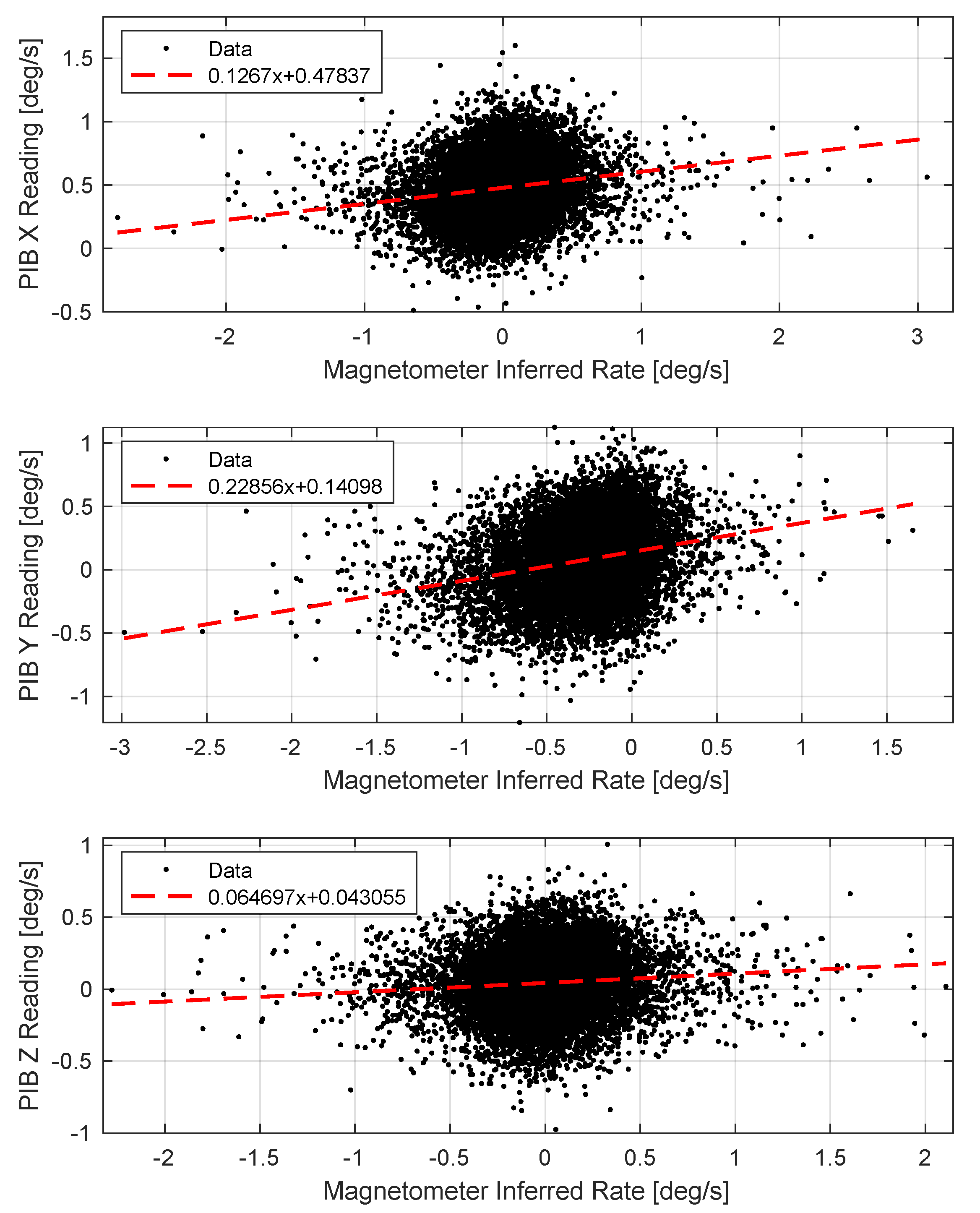
Figure 7 shows the cross-calibration of all 5 s PIB telemetry with the corresponding components of the derived rates between 10 December 2020 and 5 February 2021. A linear fit confirmed a nearly 0.5 deg/s bias in the PIB X measurements while also revealing a 0.14 deg/s and 0.04 deg/s bias in the Y and Z gyros, respectively. The slopes of each line were neglected other than to verify that they were positive. We subsequently uplinked a software update to subtract these offsets from the PIB gyros. As shown in
Figure 4b and
Figure 5c, the result was an immediate improvement in attitude knowledge. We continued to iterate on these estimates as additional 5 s telemetry was downlinked, uploading further corrections approximately once per month. The final bias update was performed in October 2022. The reduced availability of 5 s telemetry afterwards prevented further updates.
3.4. Momentum Management Strategy
Significant improvements in attitude control performance during the first three months of solar sailing were achieved through refinements to the angular momentum management strategy. At deployment, momentum desaturation (“desats”) was commanded manually via transition to mode 0 followed by a manual command back to solar sailing. This sometimes led to long periods of momentum wheel saturation if the saturation occurred shortly after the final tracking pass for a day, or if mode 2 could not be re-commanded in time before end of the last pass.
The next strategy was to automatically command 10 min in mode 0 if the wheel speed exceeded 4000 RPM. This was performed by an onboard script. The strategy was retired after less than a month, however, as it was observed that the frequent transitions were disruptive to attitude control, as LS2 usually required multiple orbits to reacquire a controlled attitude after tumbling in mode 0. The final strategy that was employed was to adjust the onboard script to automatically command mode 0 for two orbits at a regular cadence regardless of the wheel RPM. This strategy also introduced the delay in mode 3 before cycling back to solar sailing. Initially, the desats were performed every day with only 5 min in mode 3. By 2021, the desats were being commanded once every two days with a full orbit in mode 3. This remained the strategy for the rest of the mission.
5. Deorbit
5.1. Data Collection
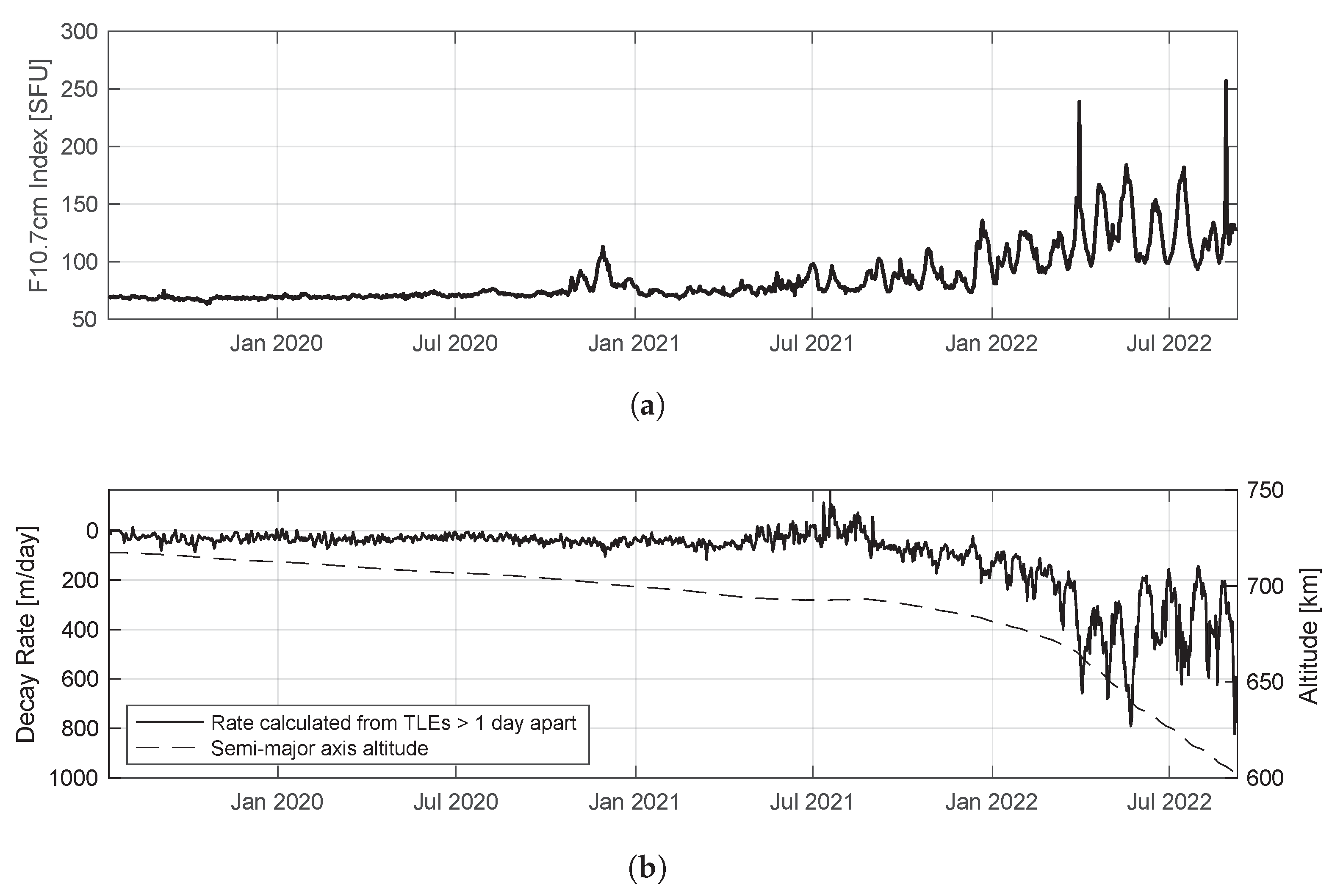
LS2’s orbital altitude entered a rapid decline in early 2022. Although some periods of On–Off control comparable to the best performance of the mission (see
Figure 6) were still visible at the start of the year, the effects on the orbit were overwhelmed by atmospheric drag. Difficulties keeping the PIB gyros calibrated due to challenges in downlinking sufficient 5 s telemetry data led to degrading attitude performance and, by summer 2022, On–Off slews were no longer visible in downlinked data. The team recognized that the spacecraft was no longer under control and that attitude knowledge was unreliable.
During the final months before deorbit, emphasis was placed on frequent imaging of the sail and recording the uncontrolled behavior of the satellite. In particular, we were interested in observing whether the sail would stabilize aerodynamically during the final days in orbit. The hypothesis was that the offset of the 3U CubeSat bus (and thus center of mass) from the sail might cause the sail to stabilize into a maximum drag orientation with the bus ahead of the sail. Demonstrating such behavior is relevant to drag sail research, as some proposed designs seek to leverage aerodynamic stability to accelerate orbit decay [
25]. A secondary question was whether the sail might distort or collapse prematurely due to the compromised support boom.
Achieving the desired observations required a final software update. To give LS2 the best chance of stabilizing, we needed to deactivate the spacecraft’s actuators so that they would not interfere with the aerodynamic torques that might provide stability. Normally this would be accomplished using LS2’s “No Torques” mode (
Table 3), but this mode also turned off the PIB Gyros. Since one indication of aerodynamic stability is a rotation rate that decreases with time, data from the PIB gyros were needed [
25].
With the orbit decaying rapidly and two-way communication with the satellite difficult, a major software update was not feasible. Instead, our solution was to uplink zeros for the ACS control gains, transition to detumble mode to stop the momentum wheel, then return LS2 to mode 2. This successfully prevented the torque rods and momentum wheel from actuating while retaining telemetry from the PIB gyros.
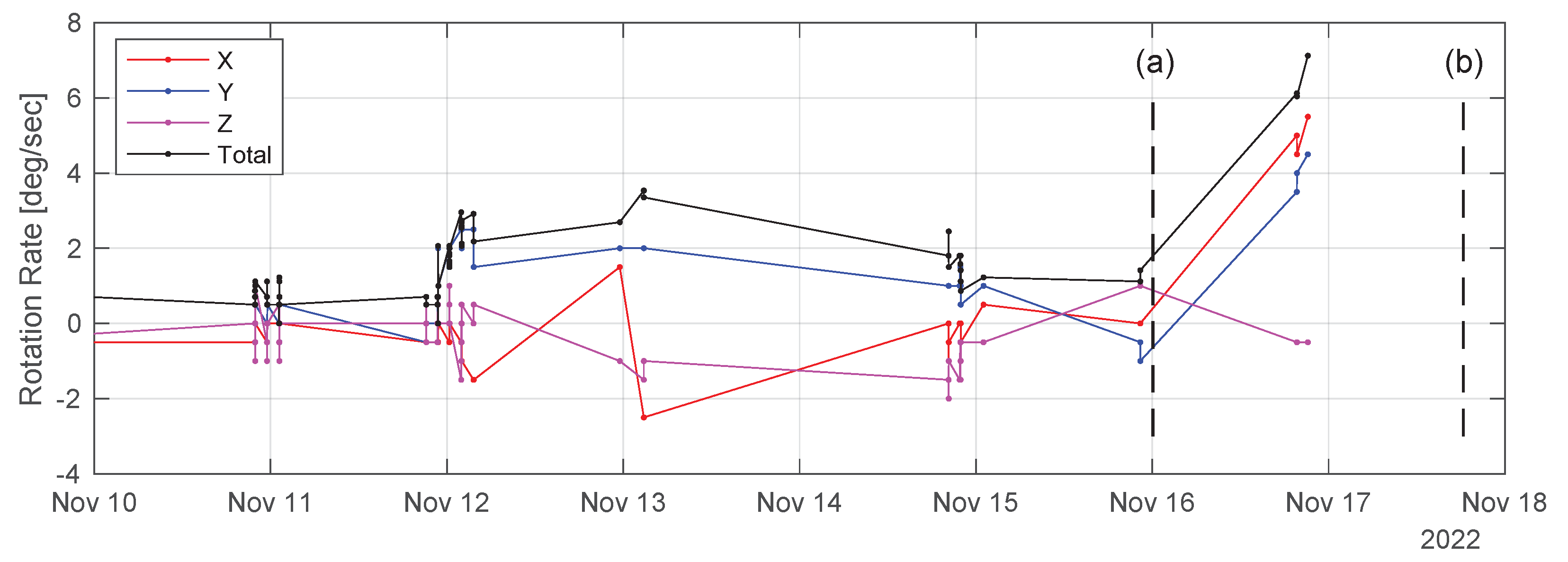
Figure 11 shows the angular rates measured by the PIB gyros during the final week of the mission after the actuators had been pacified. The data were captured from telemetry beacons broadcast by LS2 every 7 s rather than coming from downlinked telemetry files. The clusters of data points therefore represent times when the spacecraft was in direct view of either the Purdue University or Cal Poly San Luis Obispo ground stations. Note that the discretization of the of the PIB rates is coarser in the beacons than in the telemetry log files.
On 11 November, the rotation rates were comparable to other times during the mission. By 12 November, the total angular rate exceeded 2 deg/s and remained at this level for the next several days. During the ground station passes on 15 and 16 November, the rates had decreased. The sparsity of the data and lack of a reliable attitude estimate make it difficult to infer that LS2 had indeed stabilized; however, the decreasing rates may indicate that some aerodynamic damping was taking place. Note that, while the difficulty of performing gyro recalibrations by this time in the mission means that unknown rate biases are likely present in the data, we estimate that the biases are small relative to the trends in
Figure 11. This is based on the observation that the biases measured during the first recalibration (
Figure 7) were all less than 0.5 deg/s.
The final TLE epoch was at 00:06:41 UTC on November 16 and placed LS2 at an altitude of 382 km. The spacecraft was still in orbit during the tracking station passes later that day, but the observed angular rates exceeded 6 deg/s and appeared to be increasing. The last data from LS2 were received at 21:10:33 UTC from the Purdue tracking station. No data were received during Cal Poly passes rising at 22:42 UTC November 16 or 00:19 UTC 17 November, but this was not unusual given the low elevation of these passes (<10 deg) and similar behavior on previous days. However, beacons from LS2 were not received after the expected rise time at Purdue at 18:20 UTC 17 November, or any pass thereafter.
Given the high rotation rates observed in the final beacons on 16 November and the lack of contact on 17 November, we conclude that LS2 deorbited some time between 21:10 UTC 16 November and 18:20 UTC 17 November.
5.2. Comparison to 6DOF Simulations
The unusually high rotation rates observed on 16 November showed that LS2 was not aerodynamically stabilized during the final set of passes. A natural question is whether these high rates indicate that the solar sail had already collapsed. To answer this question, we performed a 6-degrees-of-freedom (6DOF) Monte-Carlo simulation of LS2’s orbit and attitude from the state indicated by the last TLE to deorbit.
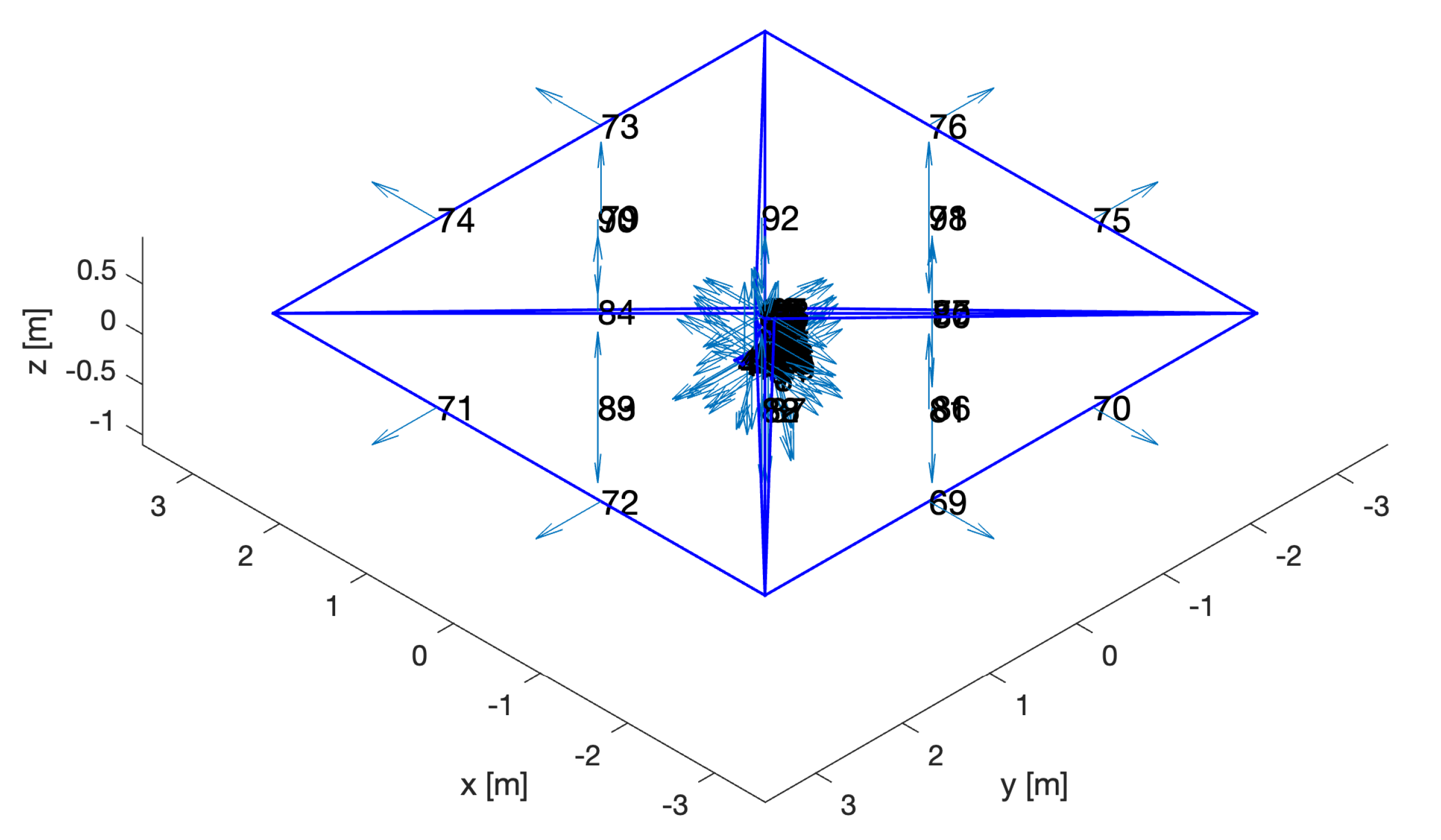
To integrate the equations of motion, we used “VSim”, a rigid-body 6DOF propagator produced by Vestigo Aerospace Inc., La Cañada Flintridge, CA, USA, for analyzing drag sail designs. The software simulates gravity gradient, solar radiation pressure, and aerodynamic torques on a panelized representation of the spacecraft.
Figure 12 depicts the panel mesh and normal vectors used to represent LS2. The assumed optical properties of the sail are consistent with [
26], and the simulator includes an EarthGRAM implementation of the NRLMSISE-00 atmospheric model [
27]. The initial state for the orbit is derived from the final TLE, with uniform distributions of [
, 0.1] deg/s for each body axis rotation rate.
Similar to
Section 4.1.1, we consider two cases to bound the uncertainty caused by the compromised sail boom: one scenario with the full sail area, and another with 75% of the area created by shortening one of the booms by half its length (thus halving the area of the panels adjacent to that boom). We ran 250 simulations of each case.
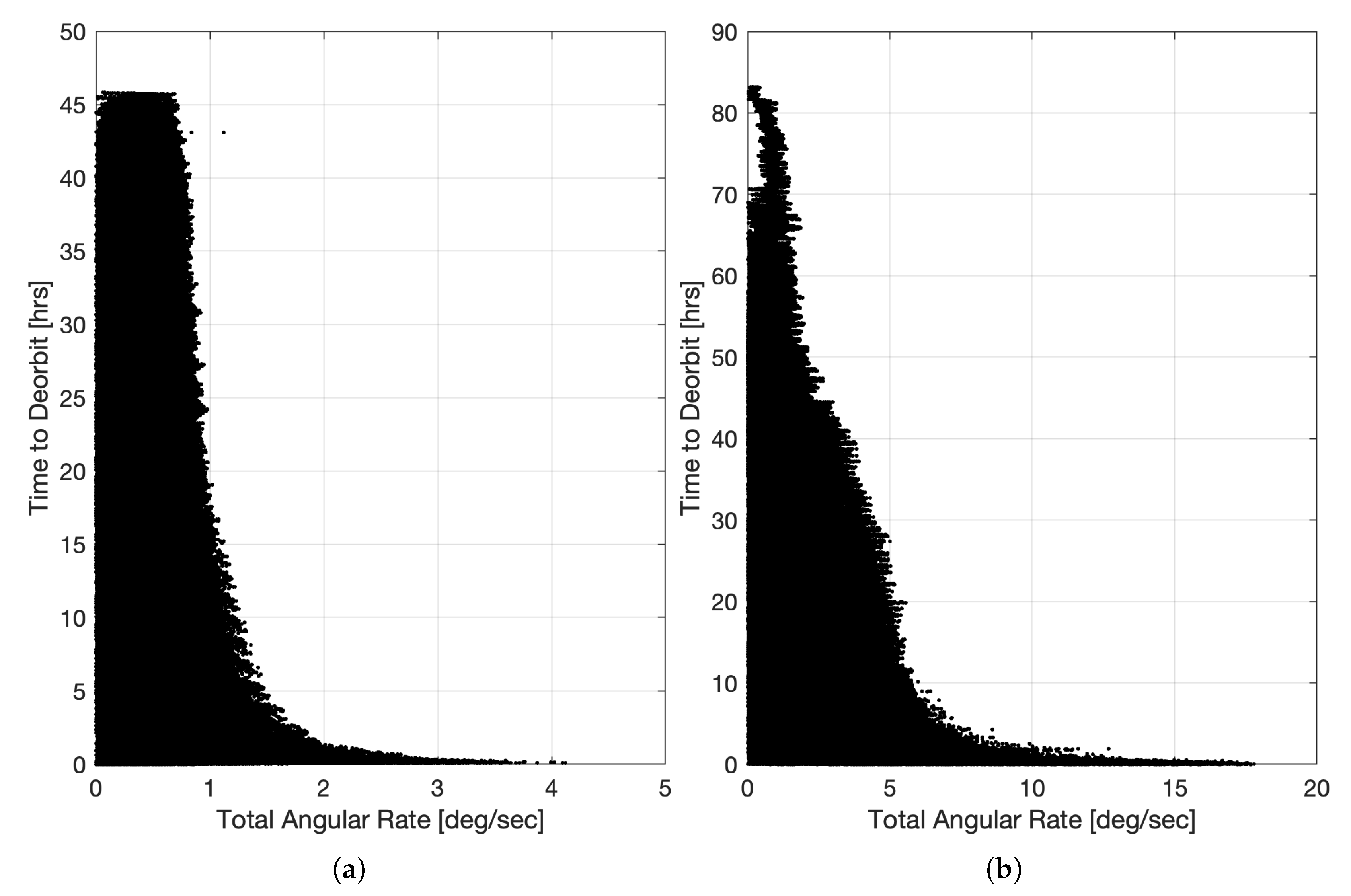
Figure 13 consolidates these runs and plots every angular rate at every time step for the full area case (
Figure 13a) and the reduced area case (
Figure 13b).
Figure 13a reveals that, with the full area of the sail, LS2 never achieves the high rotations rates (>5 deg/s) that were observed in the final tracking passes. In
Figure 13b, the asymmetry of the sail due to the collapsed boom leads to higher rotation rates. Rates >2 deg/s are present in some of the runs more than 48 h before deorbit, while rates of 5 deg/s begin to appear 24 h before. The highest observed rate of 7.1 deg/s in the final LS2 beacon is achieved by some of the runs about 5 h prior to deorbit.
Two conclusions can be made from this analysis. First, sail collapse is not necessary to explain the high rotation rates at the end of LS2’s mission because simulations with a shortened boom length exhibit similar rates to those observed both immediately prior to deorbit and several days before. Second, the fact that rates >7.1 deg/s are achieved only a few hours before deorbit in
Figure 13b suggests that LS2 deorbited within a few hours of the final tracking passes on 16 November 2022. The former conclusion is a consequential result for drag sail deorbit technology, as it suggests that even a partially failed support boom can maintain the sail until atmospheric entry is imminent.
6. Conclusions
The Planetary Society’s LightSail 2 mission was one of only a handful of solar sails that have flown to date. It was the second controlled solar sail and the first to demonstrate control of a 3-axis stabilized sail. The combination of a 4.93 kg CubeSat bus and a 32 m sail gave LS2 the lowest sail loading of any solar sail so far deployed in space, but also presented several challenges that had to be overcome. In this article we have analyzed how LS2 used an “On–Off” slewing strategy to affect the orbit in a controlled manner using solar radiation pressure. The limited actuators and attitude sensors and a bent deployment boom made maintaining control difficult, but performance improved throughout the flight as the team refined the momentum management strategy and performed on-obit recalibrations of the gyros.
For most of the mission, the orbit decayed due atmospheric drag, but our analysis shows that the On–Off strategy extended LS2’s orbit lifetime by approximately 10 months. During the summer of 2021, LS2 also demonstrated consistent increases in its orbit semi-major axis and a negative SGP4 B* drag coefficient due to improvements in On–Off control performance. Increasing solar activity and degraded communications eventually resumed orbit decay. LS2 was allowed to tumble freely during its final week in orbit, during which we observed heightened rotation rates that were nonetheless insufficient to suggest that the weakened sail had collapsed.
LS2’s orbit behavior is worthy of further analysis. A major limitation of this study has been a reliance on TLEs for defining the orbit. The limitations of the SGP4 model used to generate TLEs meant that only general trends between LS2’s orbit evolution and attitude behavior could be drawn. Future work should attempt to reconstruct the orbit with a more complete dynamic model to estimate the solar radiation pressure on the sail, including how it compares to theoretical models and how it changed over the mission. In these efforts, the TLEs could be treated as pseudo-observables to offset the lack of raw observations for orbit determination. It may also be wise to constrain uncertainties in atmospheric density and the resulting drag on LS2 by simultaneously fitting the orbits of other spacecraft with the model. Ideally, these other spacecraft should be those for which raw observations are available.
Finally, our analysis has focused mainly on the evolution of LS2’s semi-major axis. The effect of LS2’s solar sailing on other orbit elements is currently unexplored and could be important for extracting empirical sail accelerations. Obtaining these results will help validate the solar radiation pressure models that are necessary to design solar sail trajectories. Having demonstrated controlled solar sailing, the next milestone for this technology is to fly a trajectory, such as an artificial Lagrange point, which is uniquely suited to solar sails. This will prove the practical benefits of solar sailing and help realize their ultimate potential.


 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}