
Coverage Path Planning Method for Agricultural Spraying UAV in Arbitrary Polygon Area


Abstract
:1. Introduction
2. Methodology for the Agricultural UAV CPP Problem
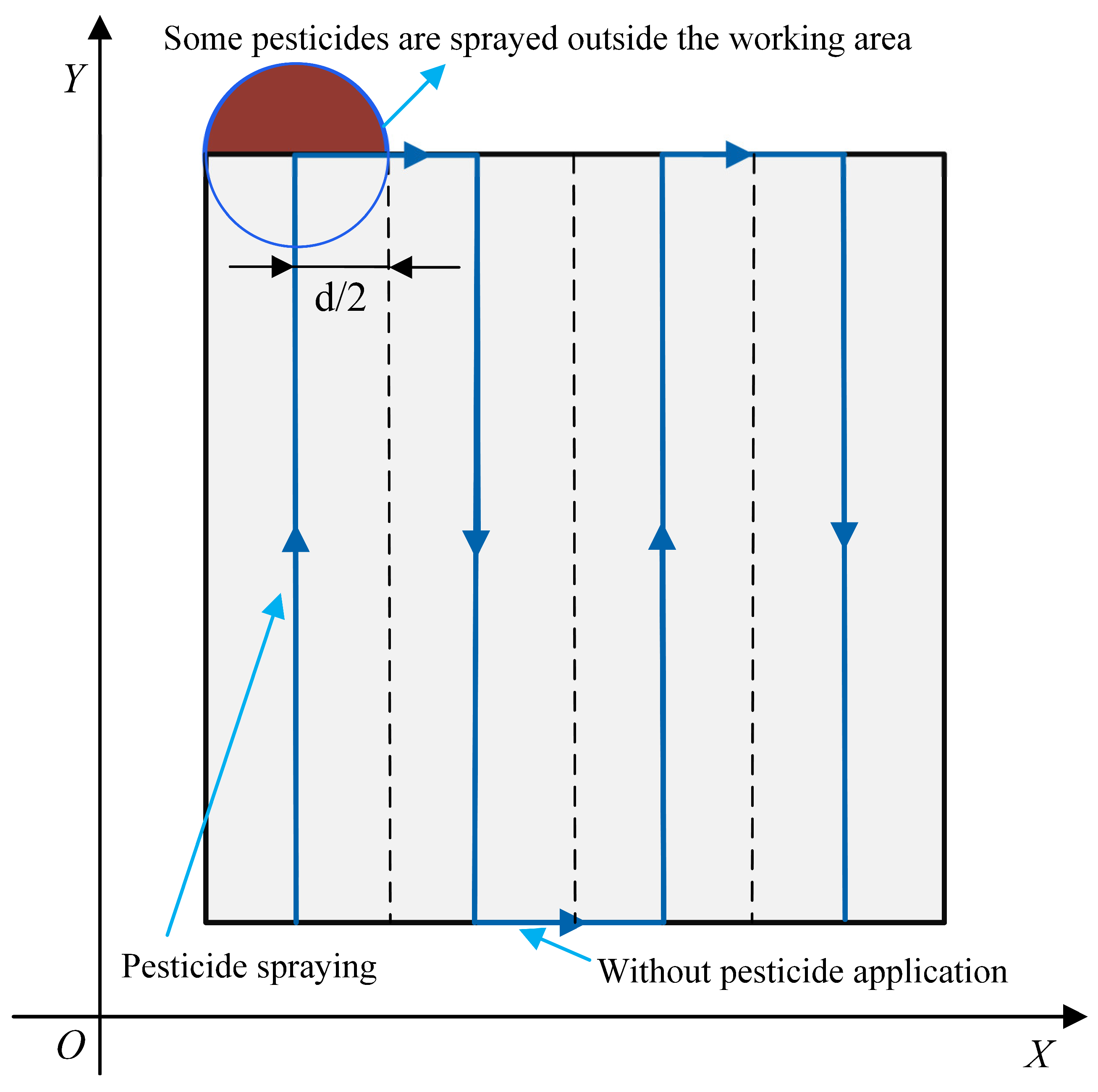
2.1. Margin Reduction of Operating Area for Agricultural Spraying UAV
2.2. CPP Algorithm in Convex Polygon Operating Area
2.3. Concave Point Detection Based on Topological Mapping
2.4. CPP Algorithm in Concave Polygon Operating Area
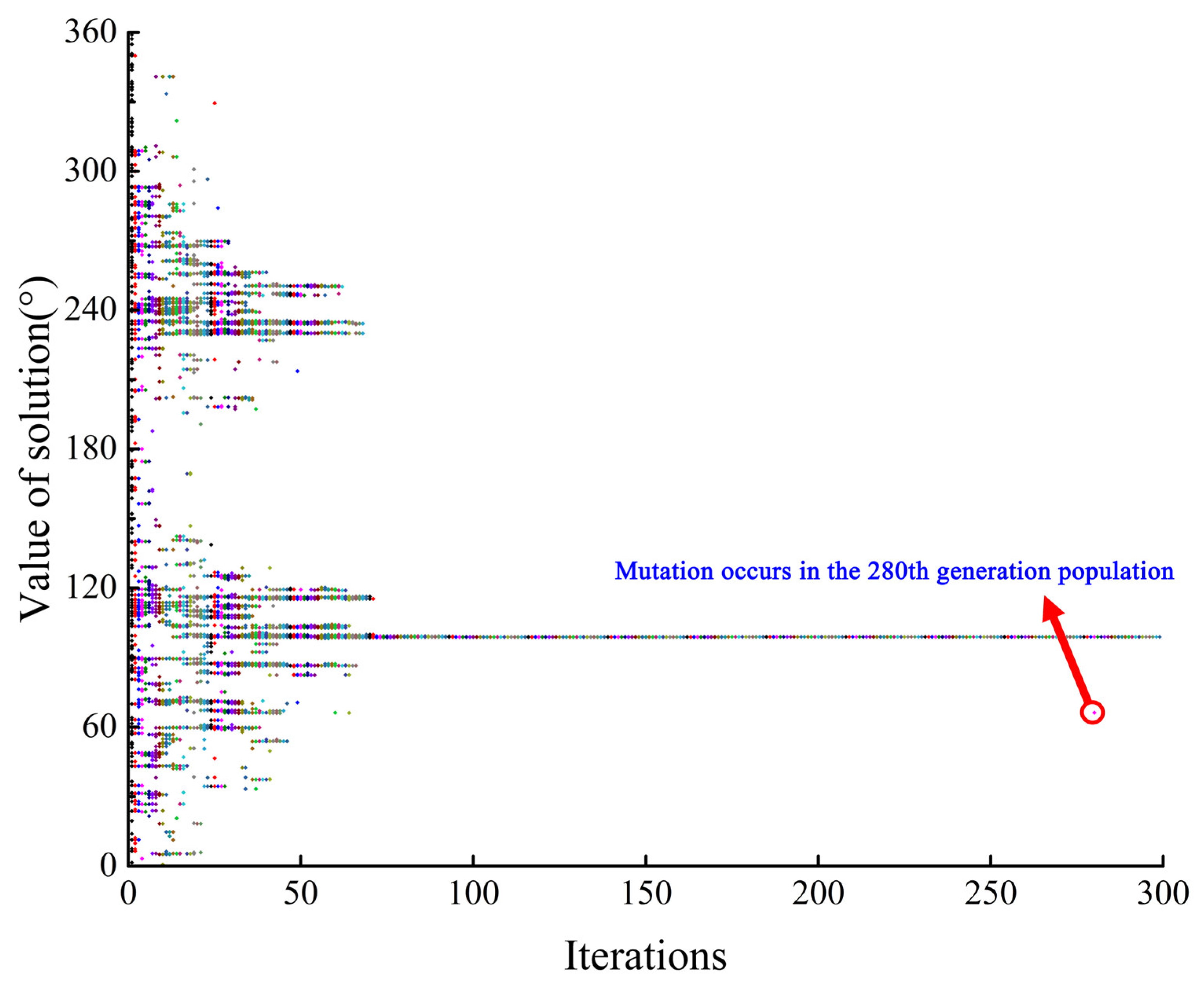
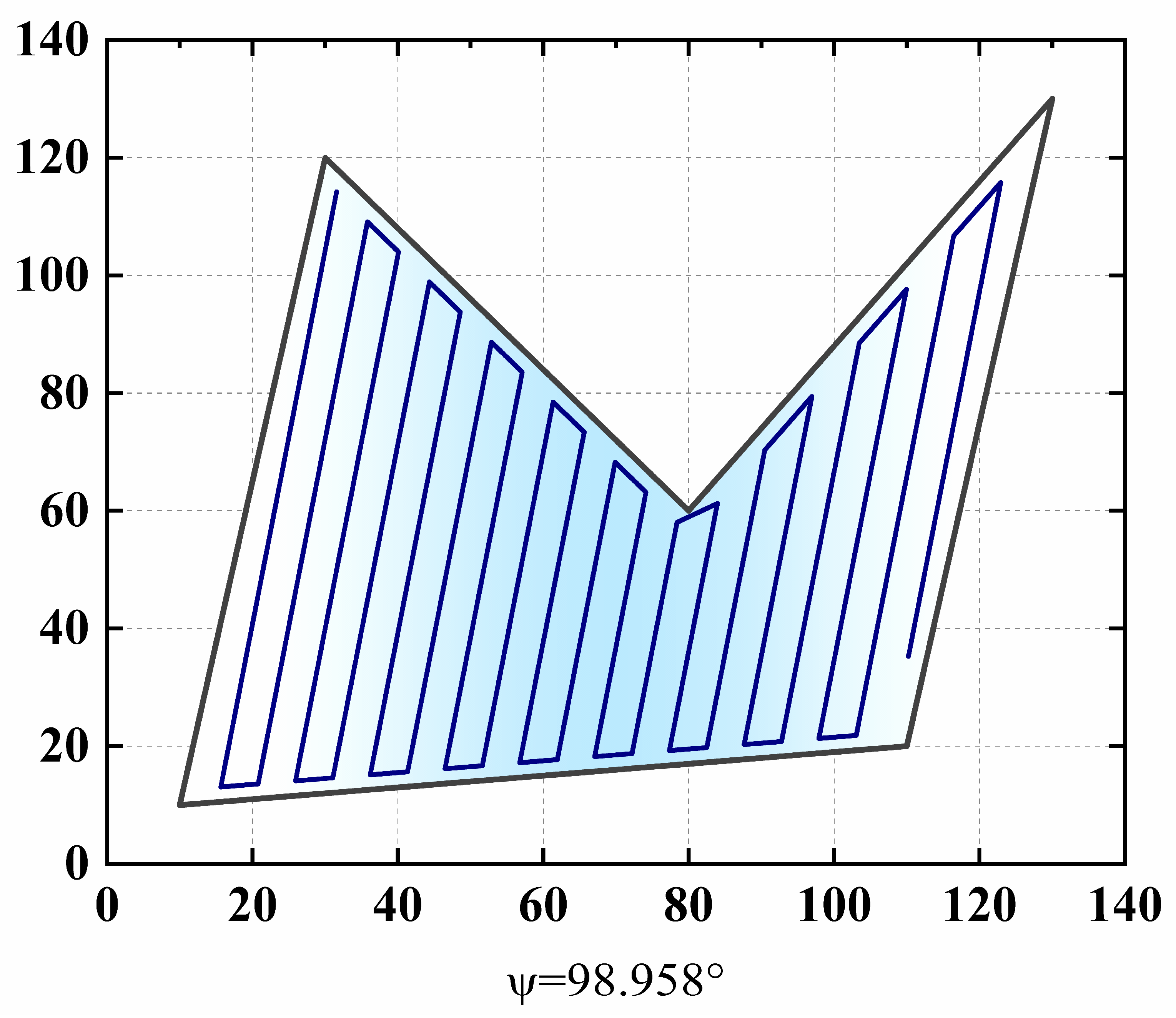
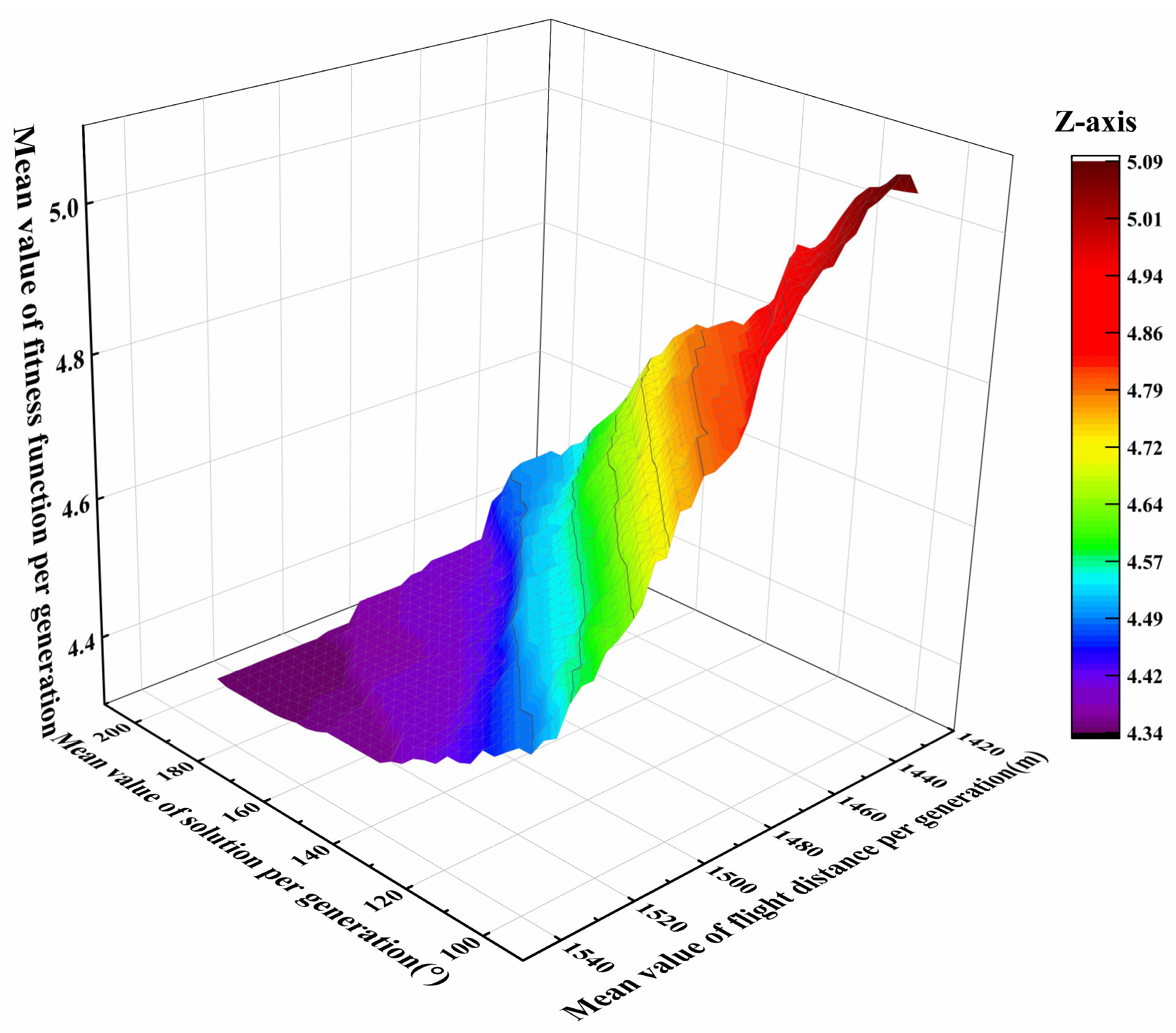
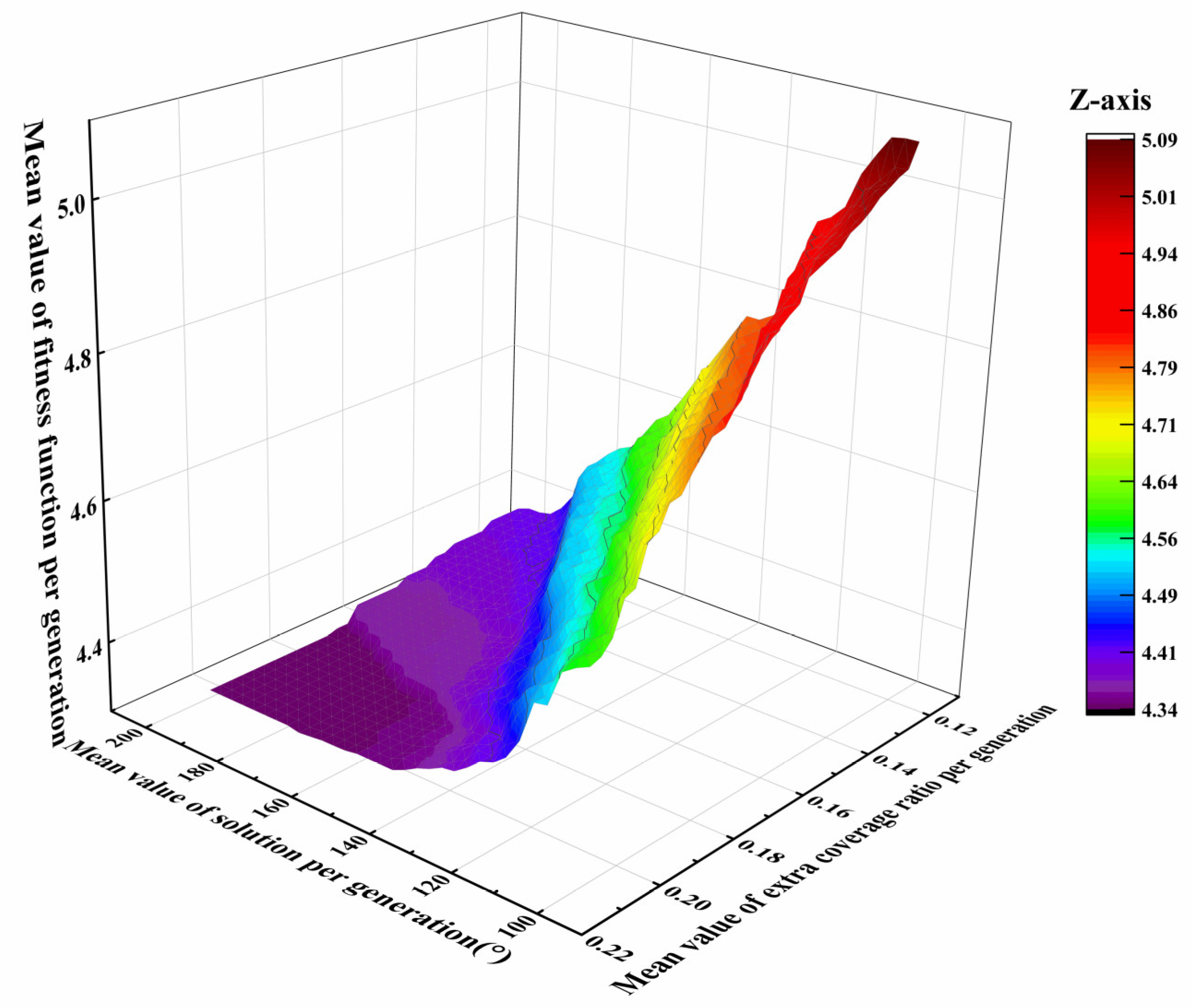
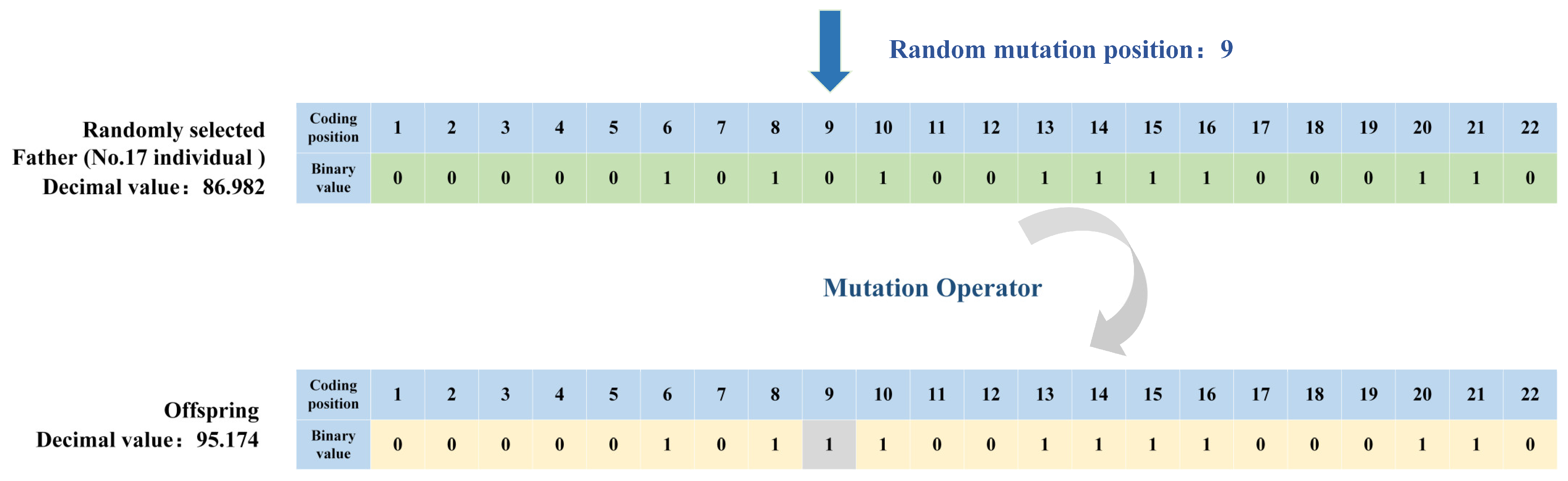
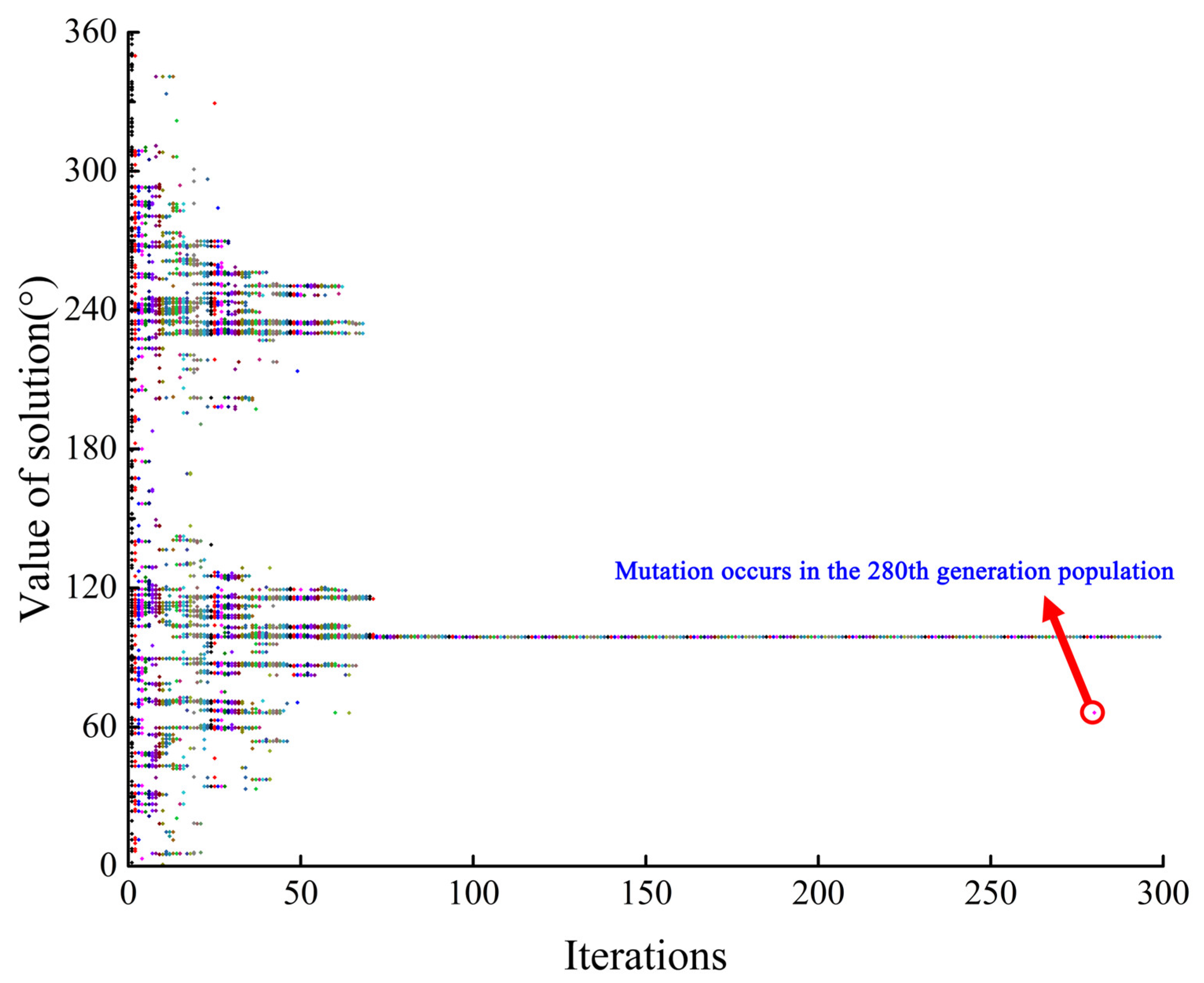
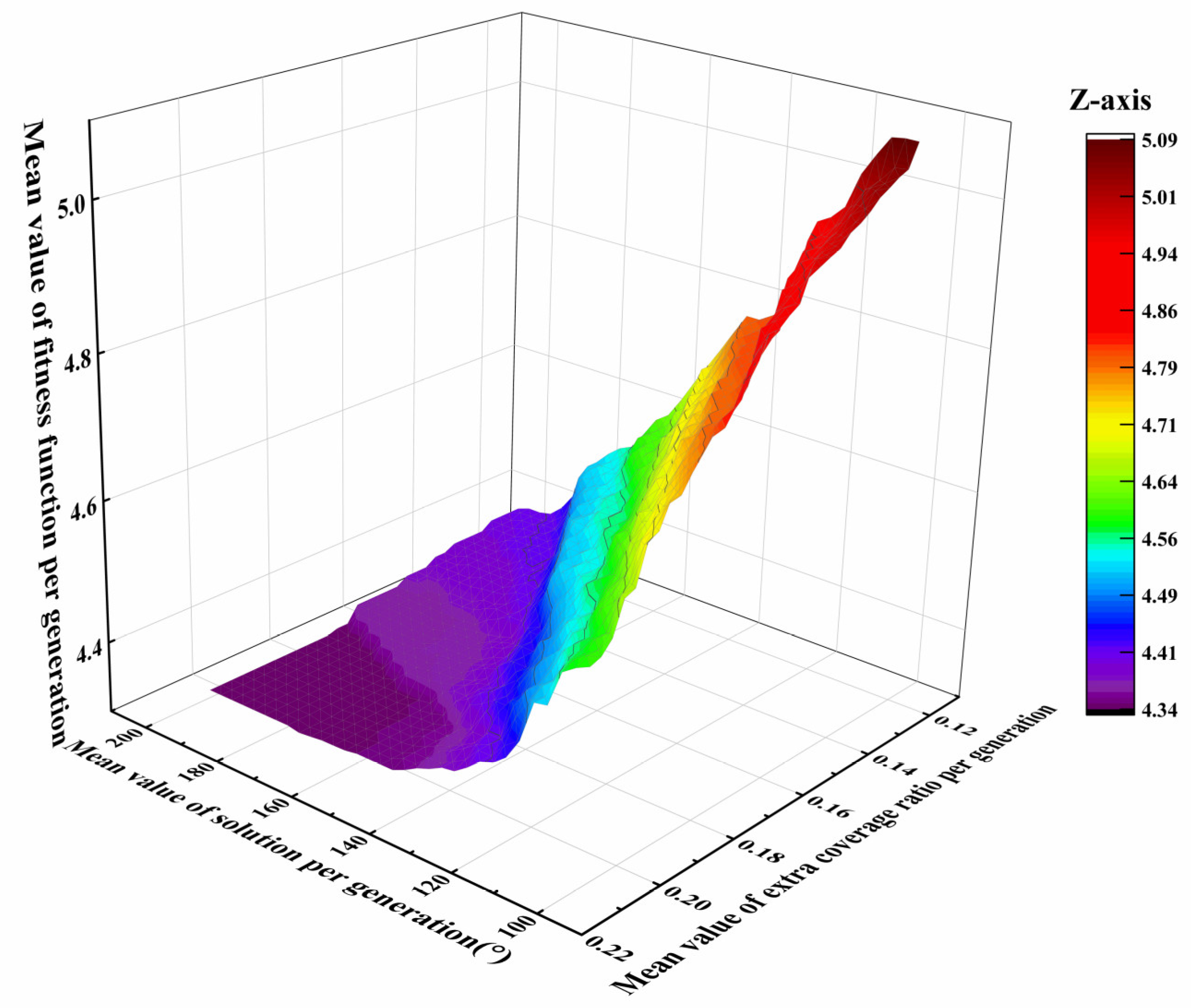
2.5. Heading Angle Optimization Based on Genetic Algorithm
| Algorithm 1: CPP algorithm for agricultural spraying UAV in the arbitrary polygon area based on genetic algorithm. |
 |
3. Implementation of Algorithm, Simulation, and Data Analysis
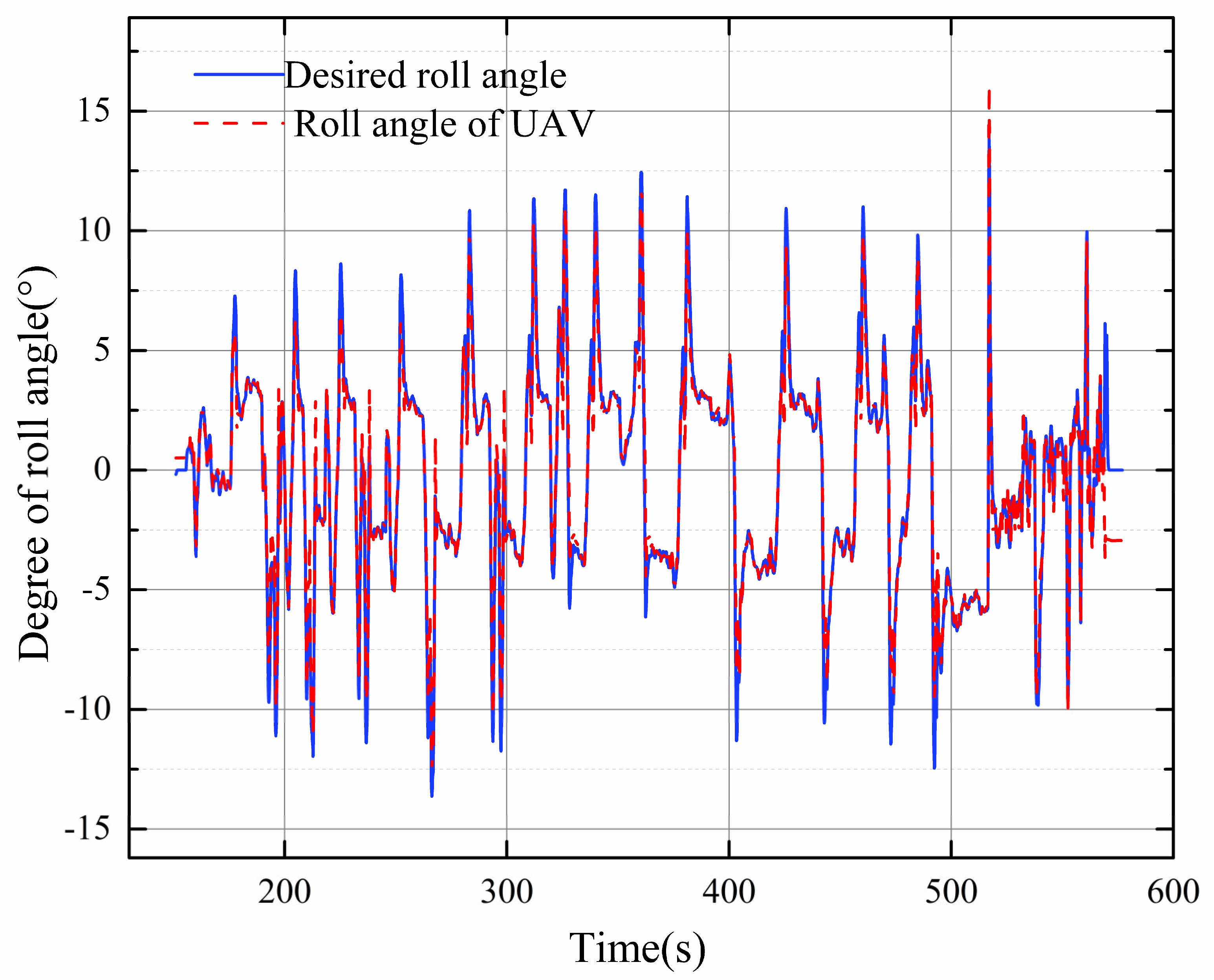
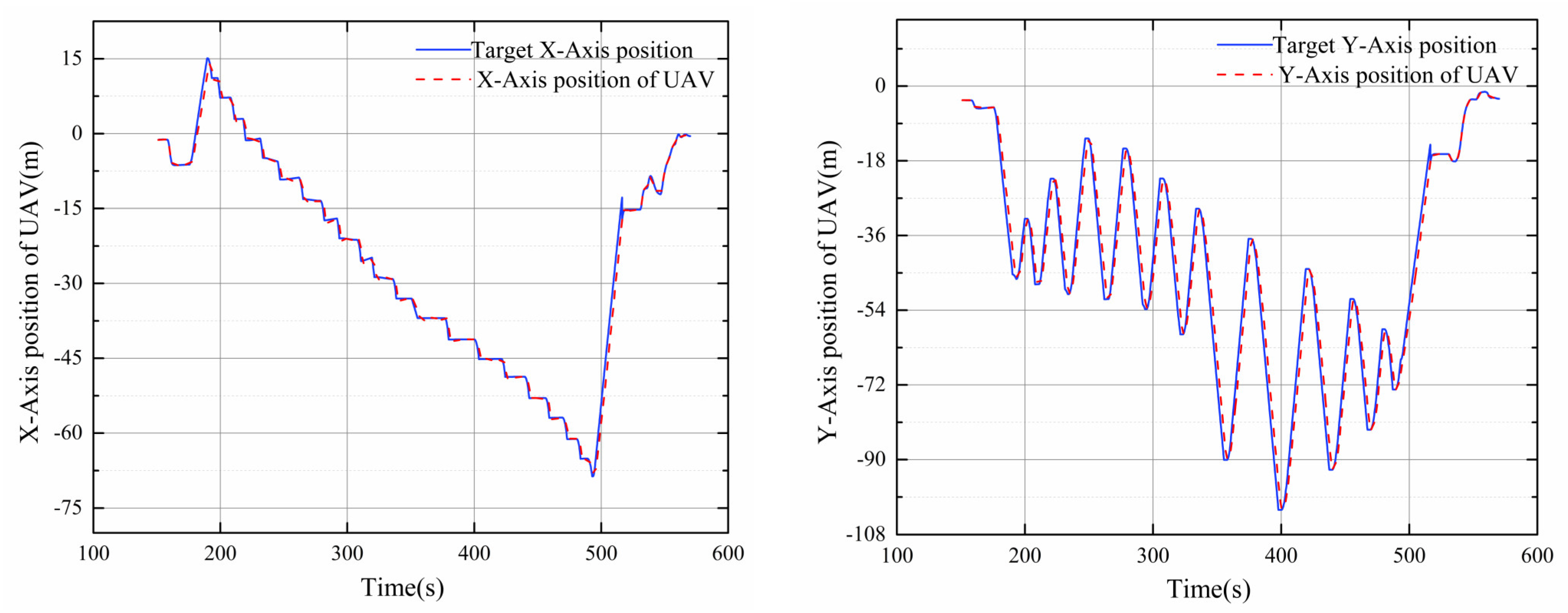
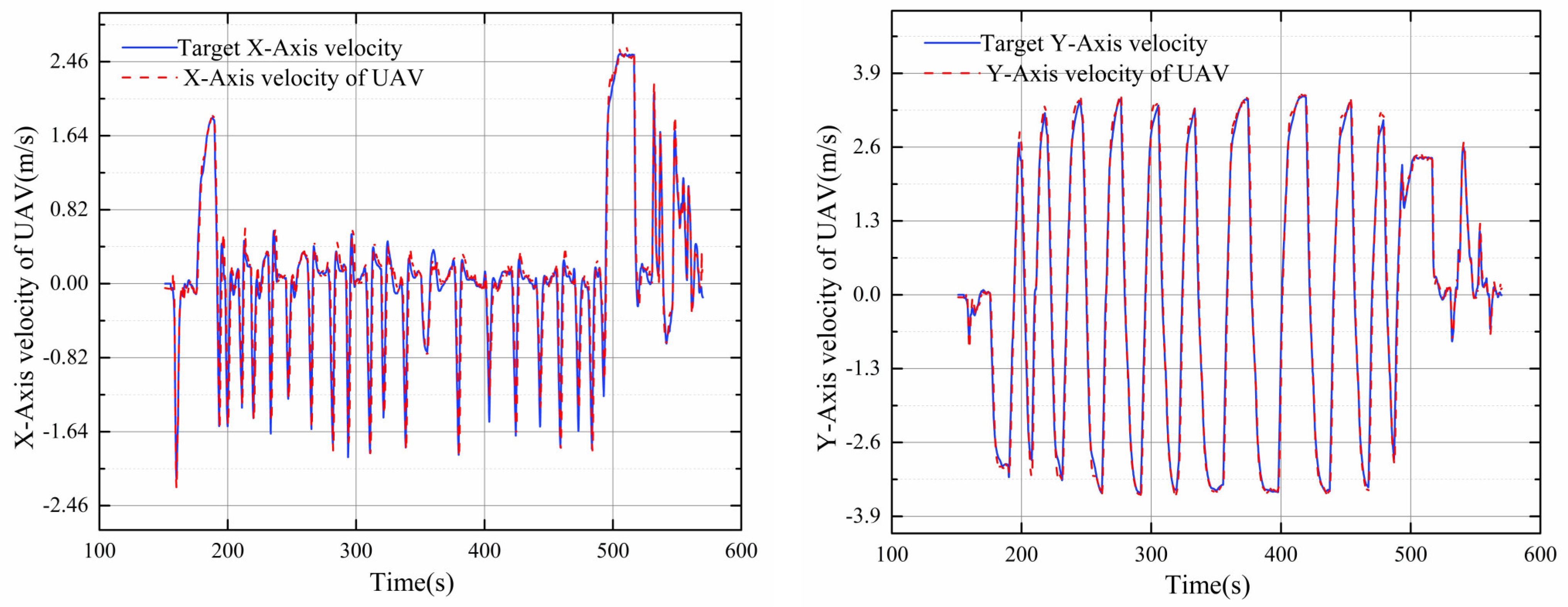
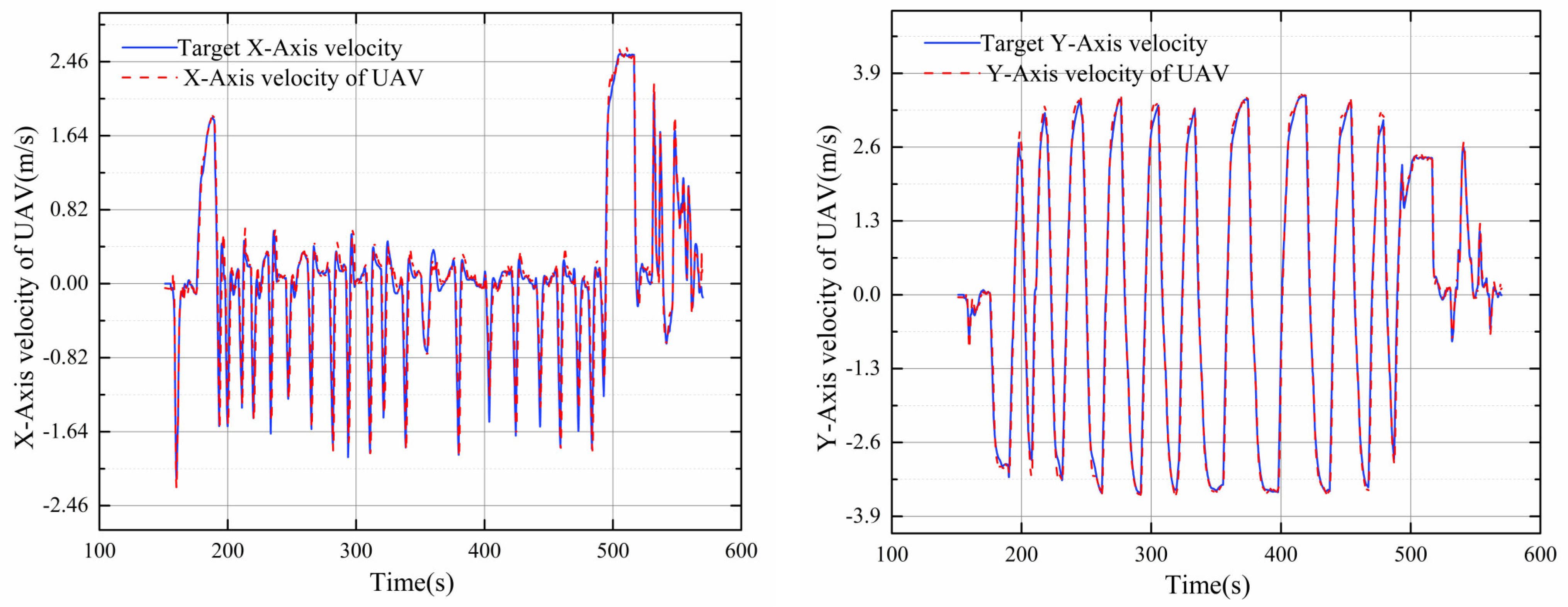
4. Engineering Application and Flight Test
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, W.; Zhang, Q.; Zou, Y.; Zhang, H.; Chen, Y. Research on Transportation Path Planning for Logistics UAV Based on Improved A* Algorithm. J. East China Jiaotong Univ. 2019, 36, 39–46. [Google Scholar] [CrossRef]
- Liu, H. A Novel Path Planning Method for Aerial UAV based on Improved Genetic Algorithm. In Proceedings of the 2023 Third International Conference on Artificial Intelligence and Smart Energy (ICAIS), Coimbatore, India, 2–4 February 2023; pp. 1126–1130. [Google Scholar] [CrossRef]
- Liu, G.; Shu, C.; Liang, Z.; Peng, B.; Cheng, L. A modified sparrow search algorithm with application in 3D route planning for UAV. Sensors 2021, 21, 1224. [Google Scholar] [CrossRef] [PubMed]
- Yan, S.; Cai, K. A multi-objective multi-memetic algorithm for network-wide conflict-free 4D flight trajectories planning. Chin. J. Aeronaut. 2017, 30, 1161–1173. [Google Scholar] [CrossRef]
- Cowlagi, R.V.; Sperry, J.P.; Griffin, J.C. Unmanned aerial vehicle trajectory optimization for executing intelligent tasks. J. Guid. Control Dyn. 2018, 41, 1389–1396. [Google Scholar] [CrossRef]
- Xu, L.; Cao, X.; Du, W.; Li, Y. Cooperative path planning optimization for multiple UAVs with communication constraints. Knowl. Based Syst. 2023, 260, 110164. [Google Scholar] [CrossRef]
- Upadhyay, S.; Ratnoo, A. Smooth path planning for unmanned aerial vehicles with airspace restrictions. J. Guid. Control Dyn. 2017, 40, 1596–1612. [Google Scholar] [CrossRef]
- Pham, T.H.; Bestaoui, Y.; Mammar, S. Aerial robot coverage path planning approach with concave obstacles in precision agriculture. In Proceedings of the 2017 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Linköping, Sweden, 3–5 October 2017; pp. 43–48. [Google Scholar] [CrossRef]
- Adhikari, M.P.; de Ruiter, A.H. Online feasible trajectory generation for collision avoidance in fixed-wing unmanned aerial vehicles. J. Guid. Control Dyn. 2020, 43, 1201–1209. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Asymptotically optimal path planning for ground surveillance by a team of UAVs. IEEE Syst. J. 2021, 16, 3446–3449. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Multi-UAV Navigation for Optimized Video Surveillance of Ground Vehicles on Uneven Terrains. IEEE Trans. Intell. Transp. Syst. 2023, 1–5. [Google Scholar] [CrossRef]
- Hailong, H.; Eskandari, M.; Savkin, A.V.; Ni, W. Energy-efficient joint UAV secure communication and 3D trajectory optimization assisted by reconfigurable intelligent surfaces in the presence of eavesdroppers. Def. Technol. 2022, in press. [Google Scholar] [CrossRef]
- Yao, P.; Wang, H.; Su, Z. Cooperative path planning with applications to target tracking and obstacle avoidance for multi-UAVs. Aerosp. Sci. Technol. 2016, 54, 10–22. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, L.; Long, T. Minimum-time trajectory planning for multi-unmanned-aerial-vehicle cooperation using sequential convex programming. J. Guid. Control Dyn. 2017, 40, 2976–2982. [Google Scholar] [CrossRef]
- Yao, W.; Qi, N.; Wan, N.; Liu, Y. An iterative strategy for task assignment and path planning of distributed multiple unmanned aerial vehicles. Aerosp. Sci. Technol. 2019, 86, 455–464. [Google Scholar] [CrossRef]
- Mukherjee, A.; Misra, S.; Raghuwanshi, N.S. A survey of unmanned aerial sensing solutions in precision agriculture. J. Netw. Comput. Appl. 2019, 148, 102461. [Google Scholar] [CrossRef]
- Jung, J.; Maeda, M.; Chang, A.; Bhandari, M.; Ashapure, A.; Landivar-Bowles, J. The potential of remote sensing and artificial intelligence as tools to improve the resilience of agriculture production systems. Curr. Opin. Biotechnol. 2021, 70, 15–22. [Google Scholar] [CrossRef] [PubMed]
- Xue, X.; Lan, Y.; Sun, Z.; Chang, C.; Hoffmann, W.C. Develop an unmanned aerial vehicle based automatic aerial spraying system. Comput. Electron. Agric. 2016, 128, 58–66. [Google Scholar] [CrossRef]
- Basiri, A.; Mariani, V.; Silano, G.; Aatif, M.; Iannelli, L.; Glielmo, L. A survey on the application of path-planning algorithms for multi-rotor UAVs in precision agriculture. J. Navig. 2022, 75, 364–383. [Google Scholar] [CrossRef]
- Cabreira, T.M.; Brisolara, L.B.; Ferreira, P.R., Jr. Survey on coverage path planning with unmanned aerial vehicles. Drones 2019, 3, 4. [Google Scholar] [CrossRef]
- Xu, B.; Xu, M.; Chen, L.P.; Tan, Y. Review on coverage path planning algorithm for intelligent machinery. Comput. Meas. Control 2016, 24, 1–5. [Google Scholar] [CrossRef]
- Tan, G.; Song, G.; Wang, B.; Tan, G.; Tan, G. Computer-based convex polygon field unmanned aerial vehicle spraying operation route planning method. Chinese Patent CN104503464A, 8 April 2015. [Google Scholar]
- Hong, Y.; Jung, S.; Kim, S.; Cha, J. Autonomous mission of multi-UAV for optimal area coverage. Sensors 2021, 21, 2482. [Google Scholar] [CrossRef]
- Choset, H. Coverage of known spaces: The boustrophedon cellular decomposition. Auton. Robot. 2000, 9, 247–253. [Google Scholar] [CrossRef]
- Chen, H.; He, K.F.; Qian, W.Q. Cooperative coverage path planning for multiple UAVs. Acta Aeronaut. Astronaut. Sin. 2016, 37, 928–935. [Google Scholar] [CrossRef]
- Wang, Z.; Luo, D.; Wu, S. A UAV path planning method for concave polygonal area coverage. Aero Weapon. 2019, 26, 95–100. [Google Scholar] [CrossRef]
- Shivgan, R.; Dong, Z. Energy-efficient drone coverage path planning using genetic algorithm. In Proceedings of the 2020 IEEE 21st International Conference on High Performance Switching and Routing (HPSR), Newark, NJ, USA, 11–14 May 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Ahmadi, S.M.; Kebriaei, H.; Moradi, H. Constrained coverage path planning: Evolutionary and classical approaches. Robotica 2018, 36, 904–924. [Google Scholar] [CrossRef]
- Nolan, P.; Paley, D.A.; Kroeger, K. Multi-UAS path planning for non-uniform data collection in precision agriculture. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017; pp. 1–12. [Google Scholar] [CrossRef]
- Mukhamediev, R.I.; Yakunin, K.; Aubakirov, M.; Assanov, I.; Kuchin, Y.; Symagulov, A.; Levashenko, V.; Zaitseva, E.; Sokolov, D.; Amirgaliyev, Y. Coverage path planning optimization of heterogeneous UAVs group for precision agriculture. IEEE Access 2023, 11, 5789–5803. [Google Scholar] [CrossRef]
- Jamshidi, V.; Nekoukar, V.; Hossein Refan, M. Implementation of UAV smooth path planning by improved parallel genetic algorithm on controller area network. J. Aerosp. Eng. 2022, 35, 04021136. [Google Scholar] [CrossRef]
- Liu, Y.; Qi, N.; Yao, W.; Zhao, J.; Xu, S. Cooperative path planning for aerial recovery of a UAV swarm using genetic algorithm and homotopic approach. Appl. Sci. 2020, 10, 4154. [Google Scholar] [CrossRef]
- Luna, M.A.; Ale Isaac, M.S.; Ragab, A.R.; Campoy, P.; Flores Peña, P.; Molina, M. Fast multi-uav path planning for optimal area coverage in aerial sensing applications. Sensors 2022, 22, 2297. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Description |
|---|---|
| Coordinates of operation area boundary |
[(10, 10), (30, 120), (80, 60), (130, 130), (110, 20)] |
| Problem solution interval | [0, 360] |
| The population size | 200 |
| Iterations | 300 |
| Precise digits of solution | 3 decimal places |
| Selection rate | 0.5 |
| Crossover rate | 0.4 |
| Mutation rate | 0.001 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Sheng, H.; Zhang, J.; Zhang, H. Coverage Path Planning Method for Agricultural Spraying UAV in Arbitrary Polygon Area. Aerospace 2023, 10, 755. https://doi.org/10.3390/aerospace10090755
Li J, Sheng H, Zhang J, Zhang H. Coverage Path Planning Method for Agricultural Spraying UAV in Arbitrary Polygon Area. Aerospace. 2023; 10(9):755. https://doi.org/10.3390/aerospace10090755
Chicago/Turabian StyleLi, Jiacheng, Hanlin Sheng, Jie Zhang, and Haibo Zhang. 2023. "Coverage Path Planning Method for Agricultural Spraying UAV in Arbitrary Polygon Area" Aerospace 10, no. 9: 755. https://doi.org/10.3390/aerospace10090755
APA StyleLi, J., Sheng, H., Zhang, J., & Zhang, H. (2023). Coverage Path Planning Method for Agricultural Spraying UAV in Arbitrary Polygon Area. Aerospace, 10(9), 755. https://doi.org/10.3390/aerospace10090755