
Energy Analysis for Solar-Powered Unmanned Aerial Vehicle under Static Soaring

Abstract
:1. Introduction
2. Problem Formulation
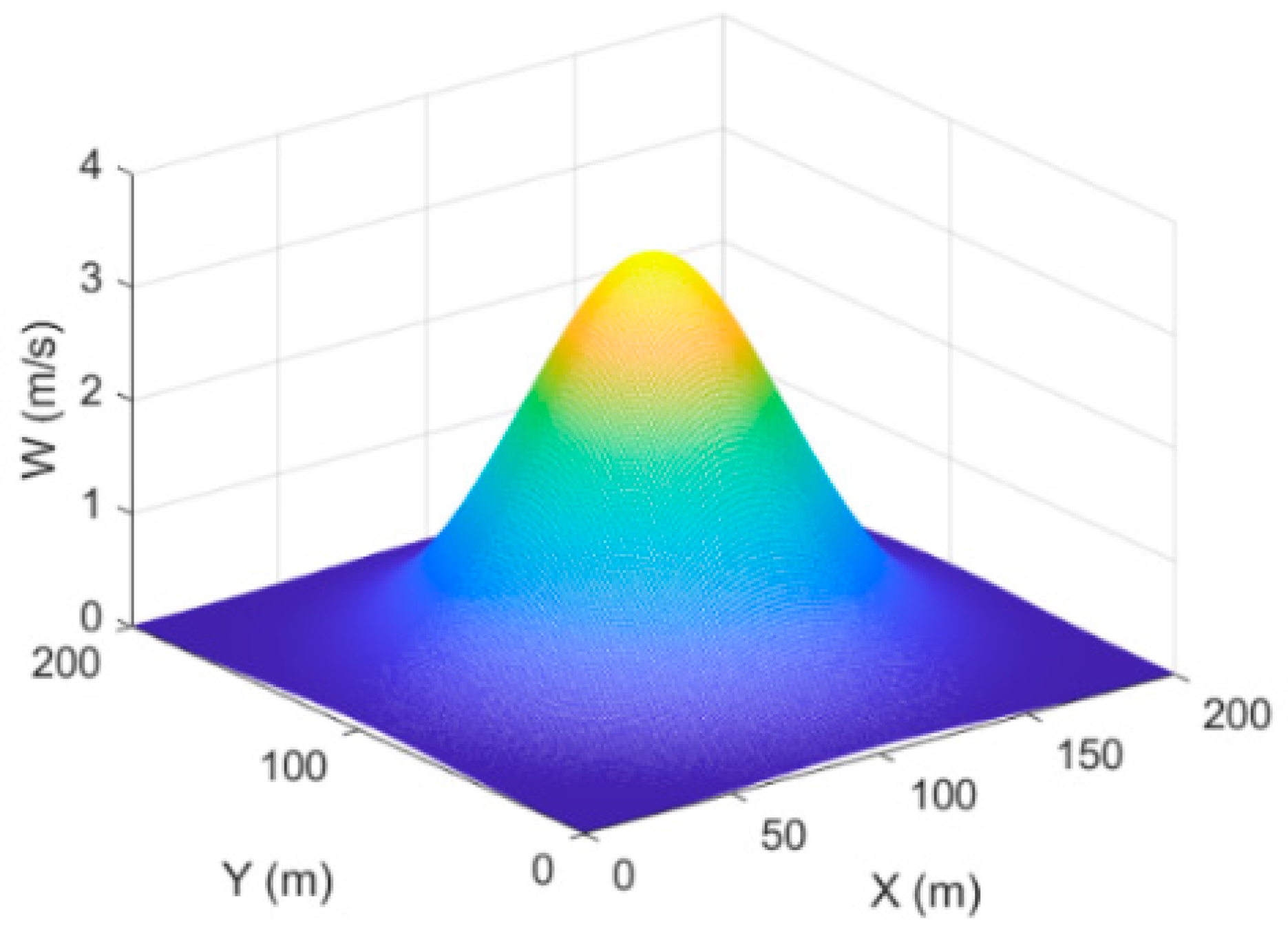
2.1. Model of Thermal
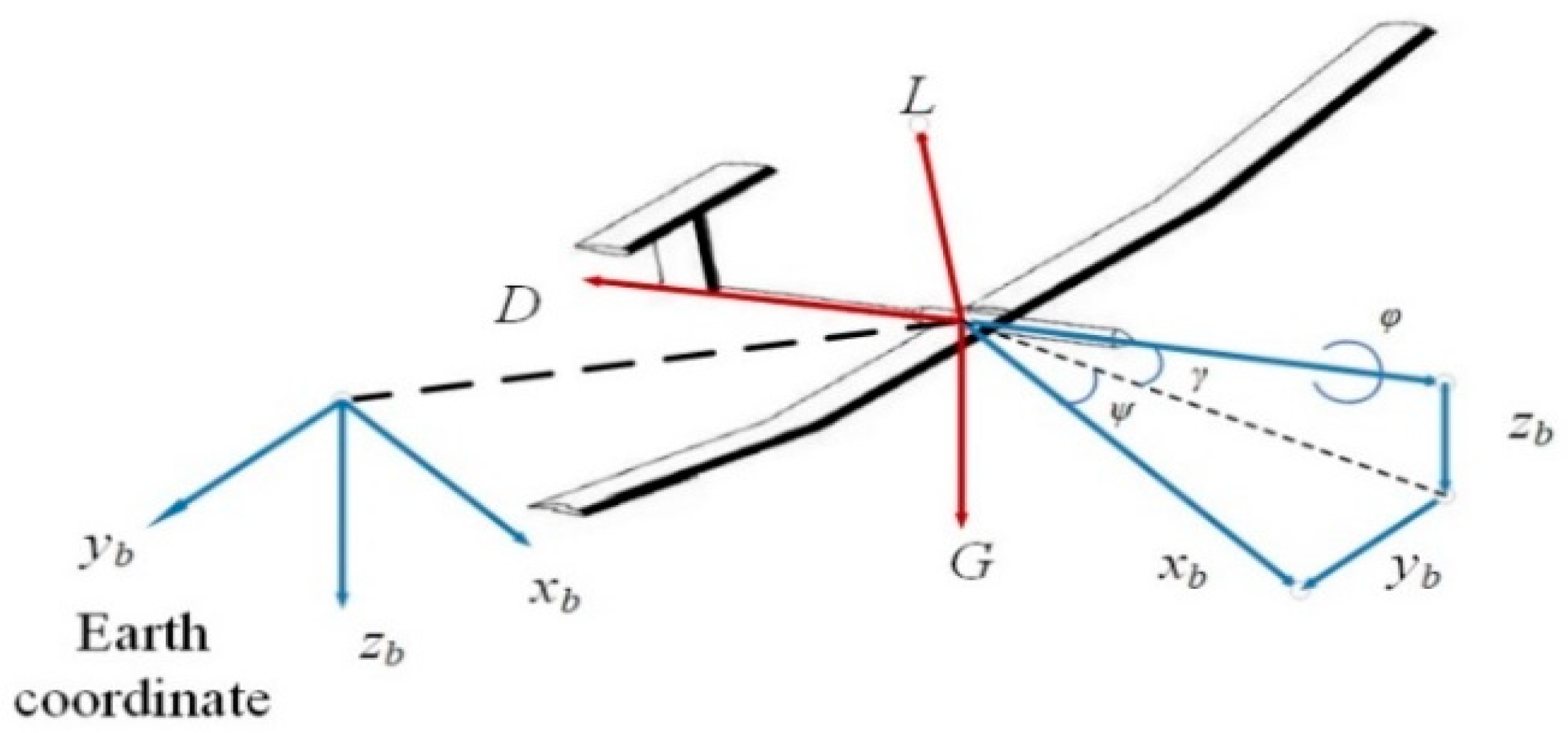
2.2. Vehicle Kinematic Model
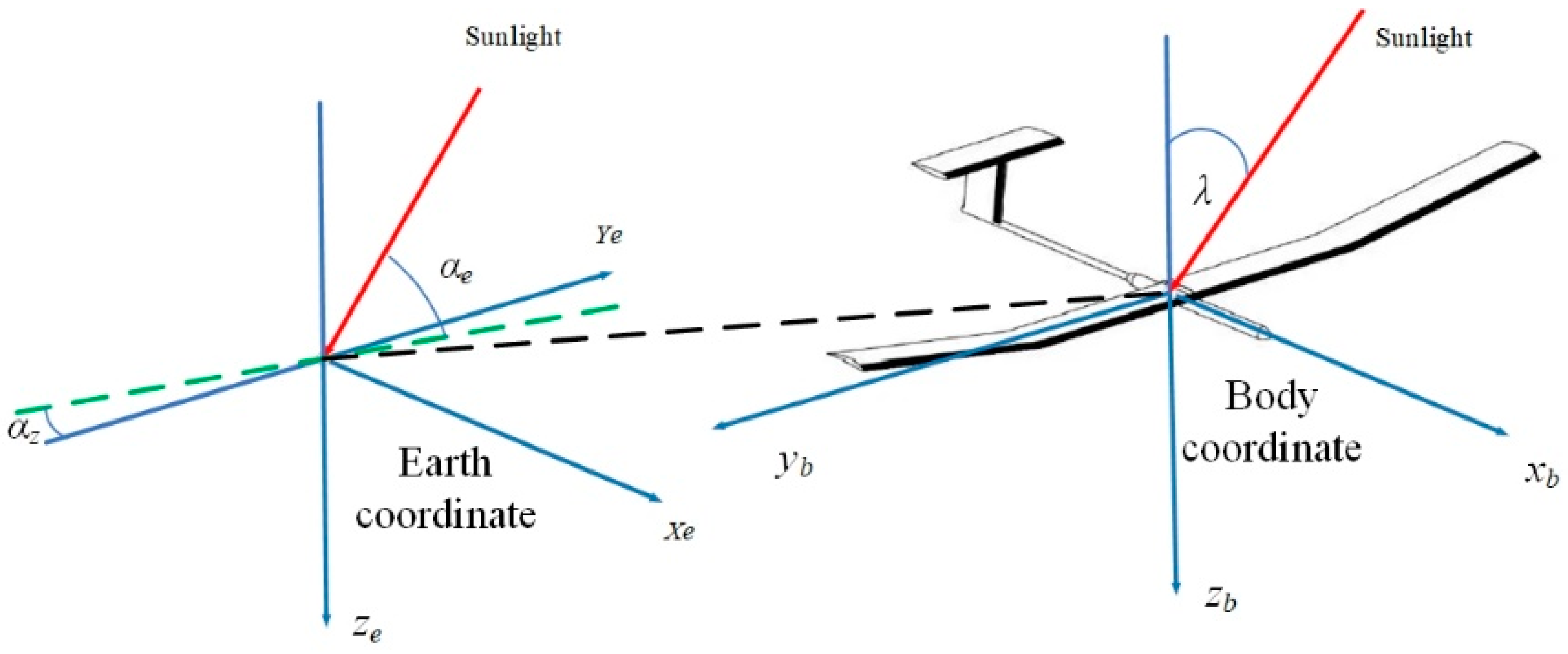
2.3. Solar Irradiance Model
2.4. Energy Model of the SUAV
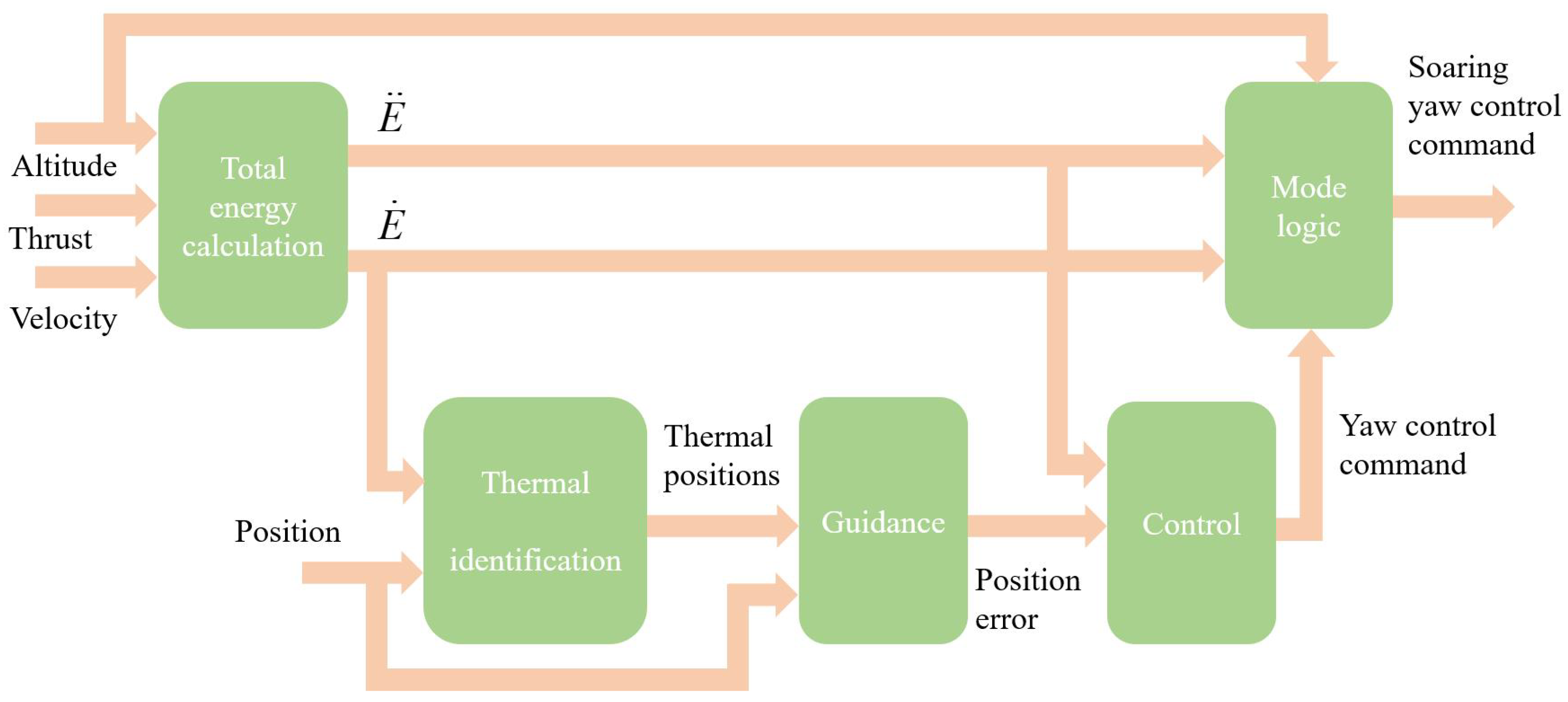
3. Integrated Guidance and Control Process for Soaring
3.1. Total Energy and Autonomous Soaring Process
3.2. Guidance and Control
4. Simulation and Results
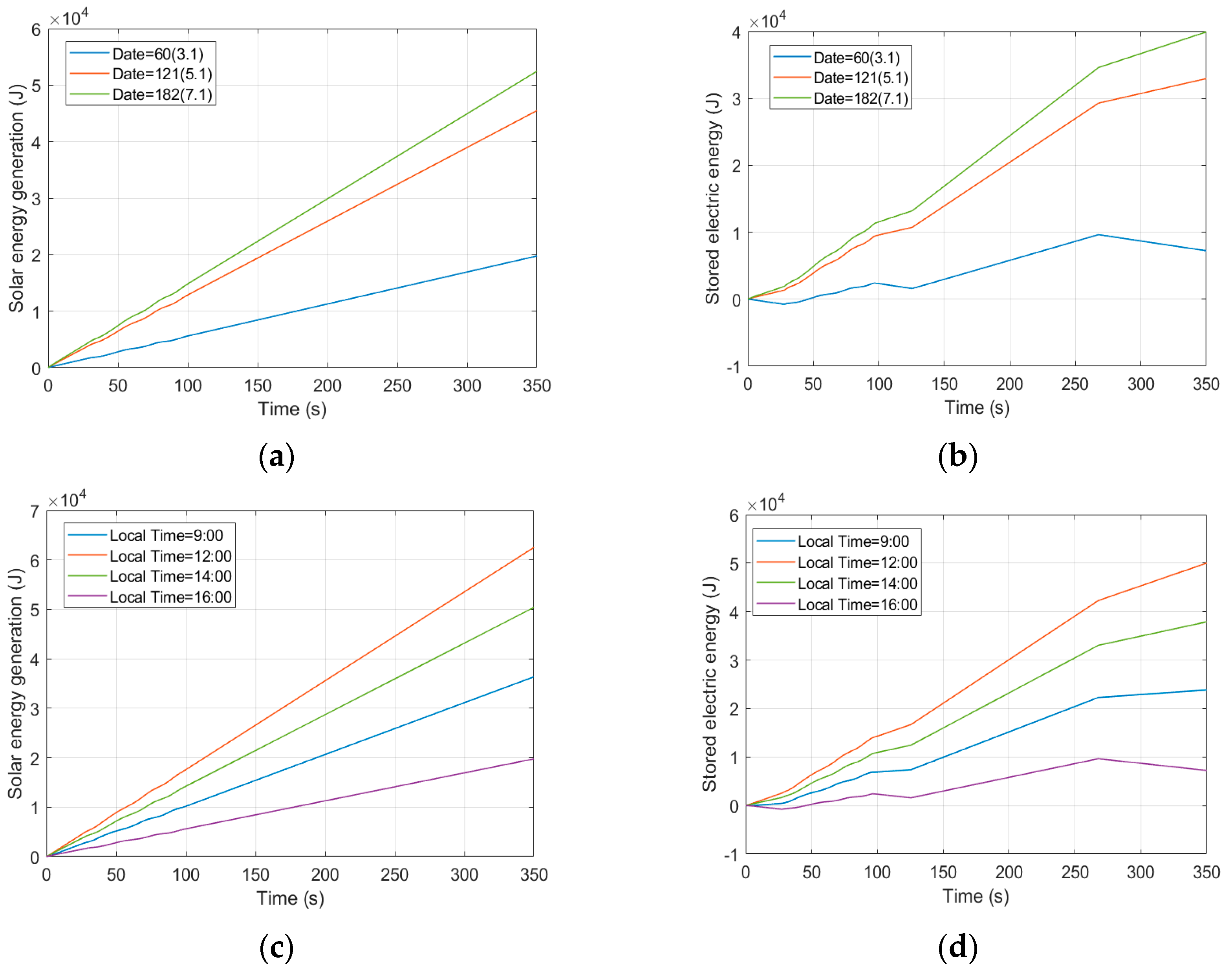
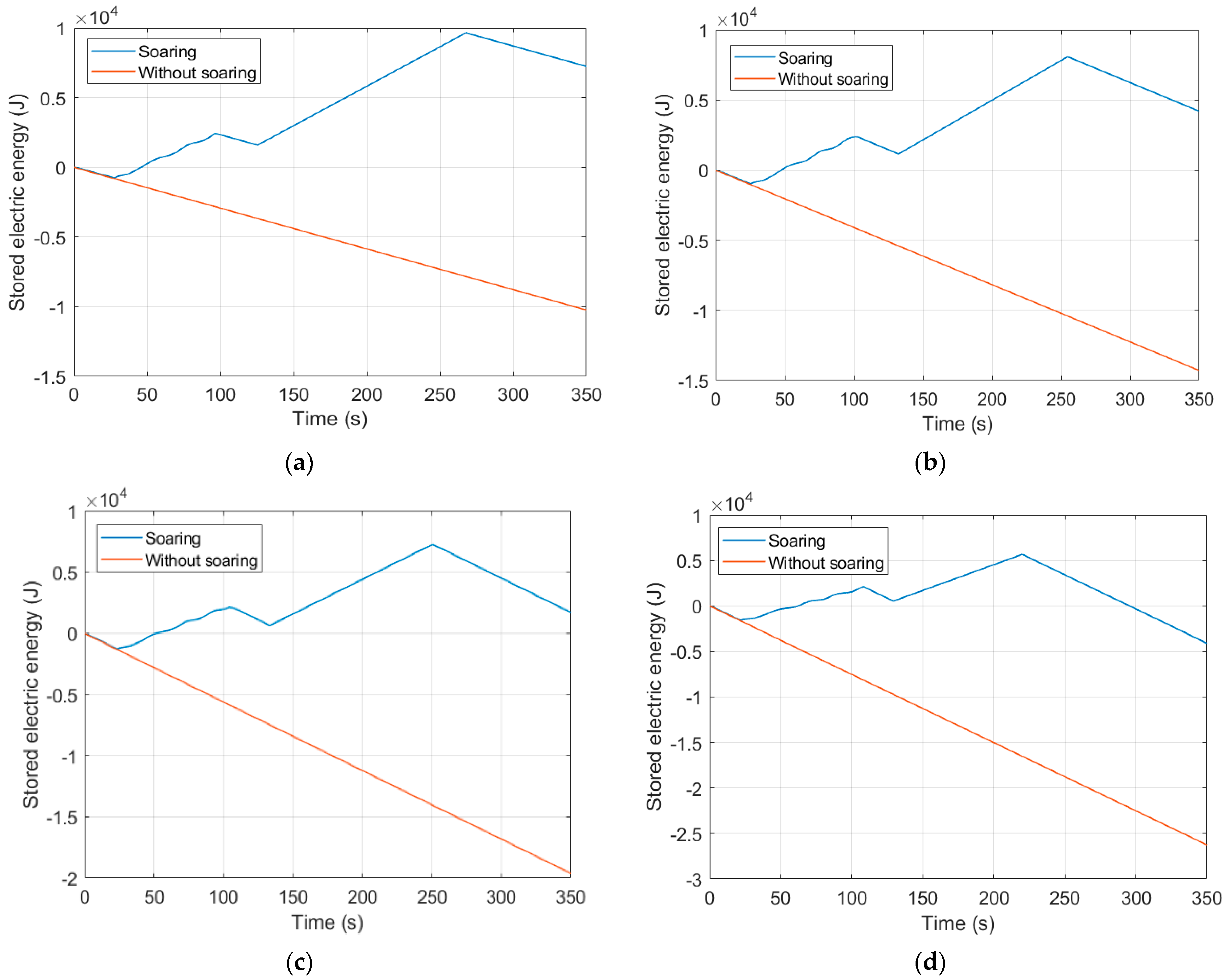
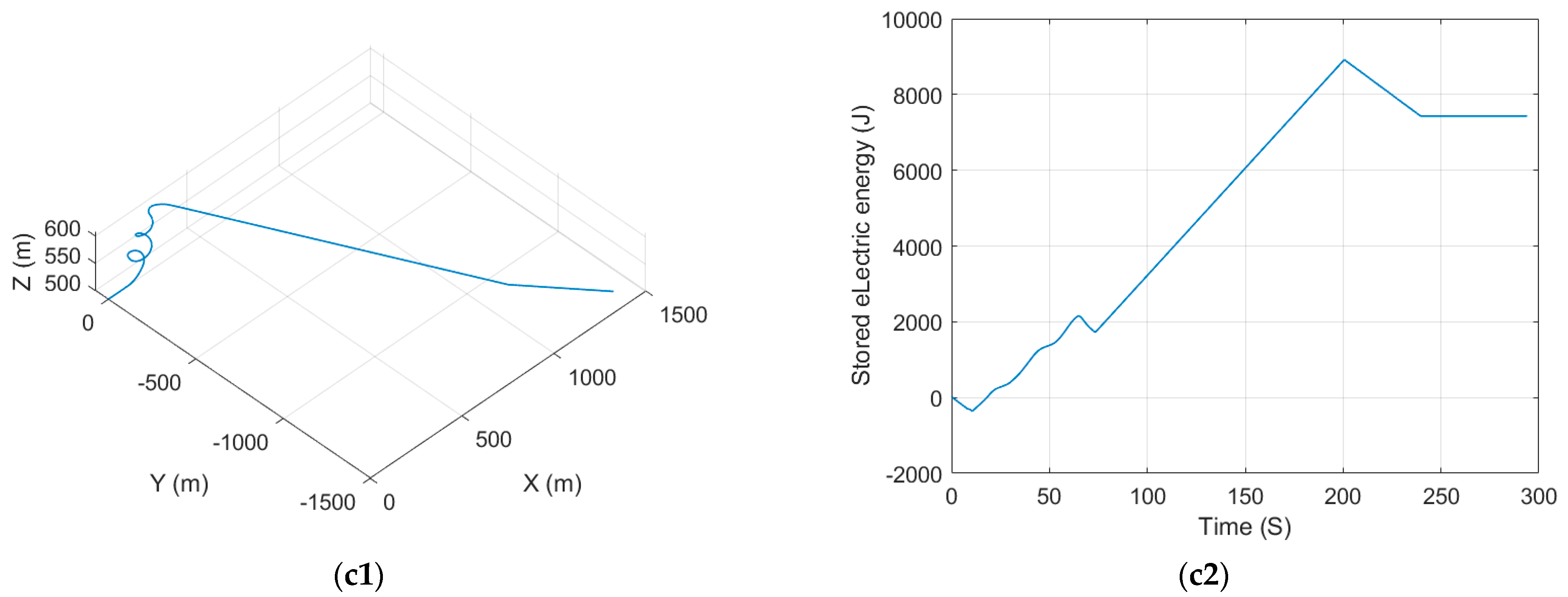
4.1. Stored Electric Energy Analysis
4.2. Equivalent Endurance
4.3. SUAV Velocity Selection and Energy Variation under Time Constraints
5. Conclusions
- (1)
- The SUAV has advanced endurance with thermal, with a more pronounced effect observed when the SUAV’s thrust consumption is higher.
- (2)
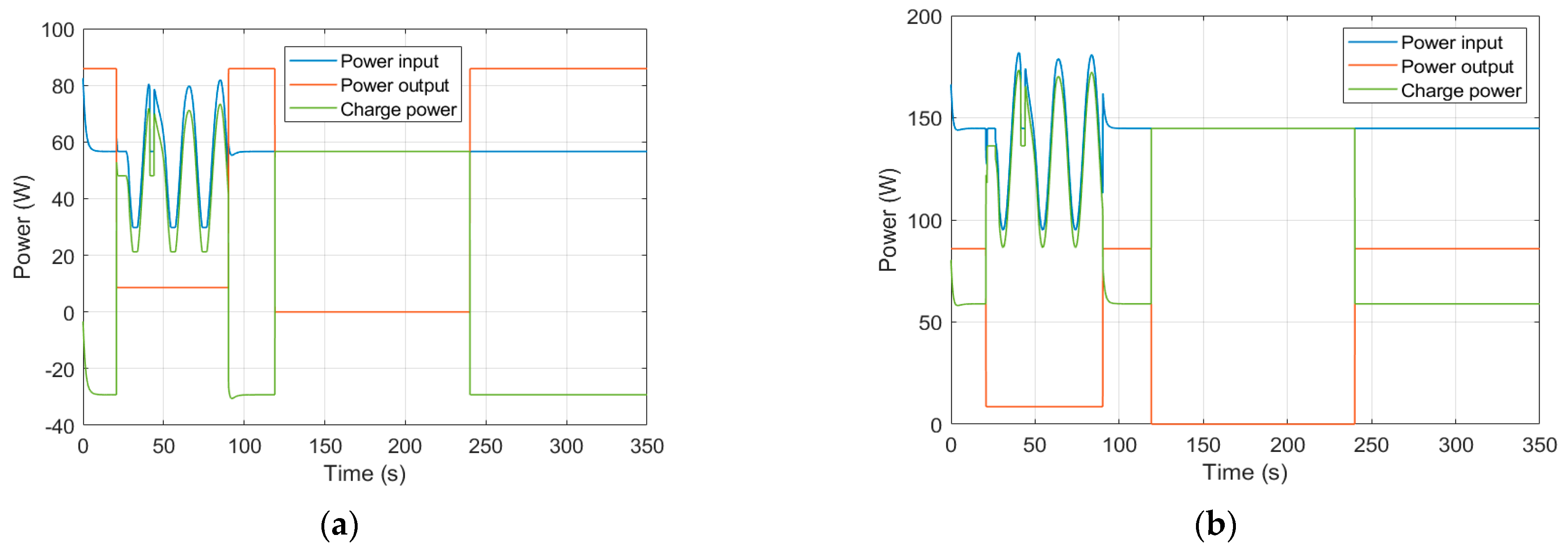
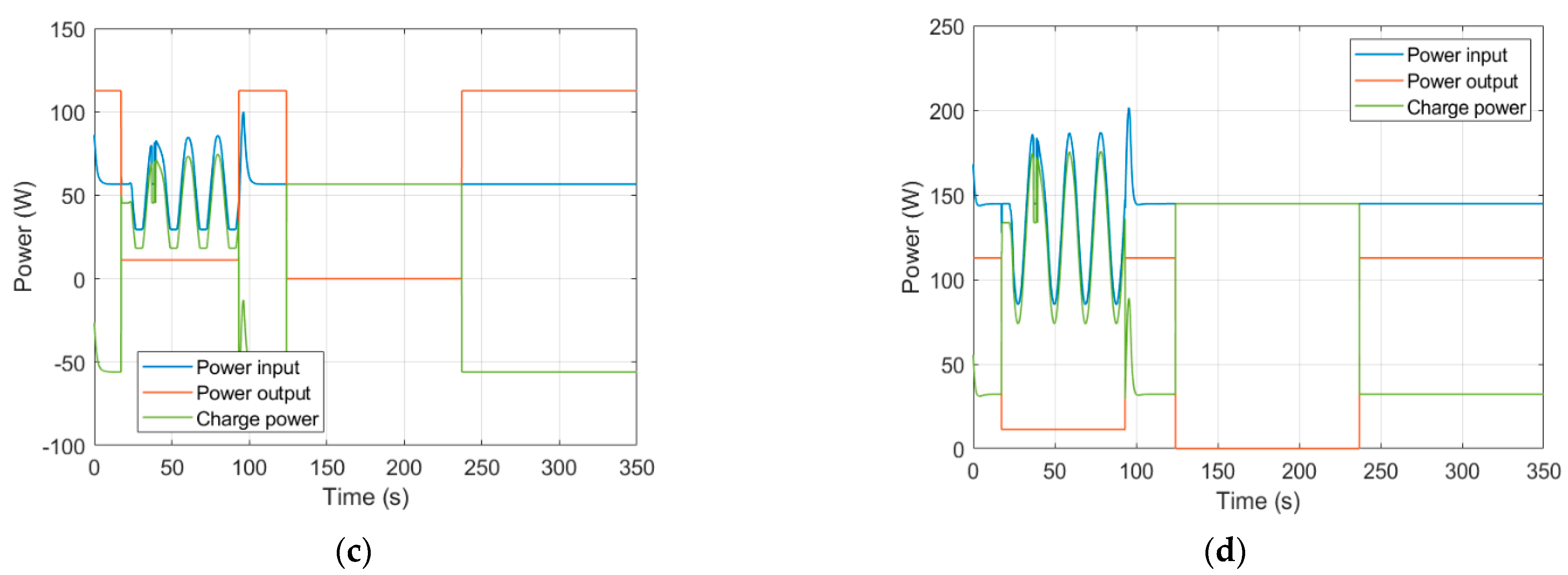
- The charging power of the SUAV is mainly determined by solar irradiation during soaring and gliding, whereas the influence of velocity and power consumption is not as crucial as previously presumed. This is because the thrust remains at a low level during the soaring or gliding phase.
- (3)
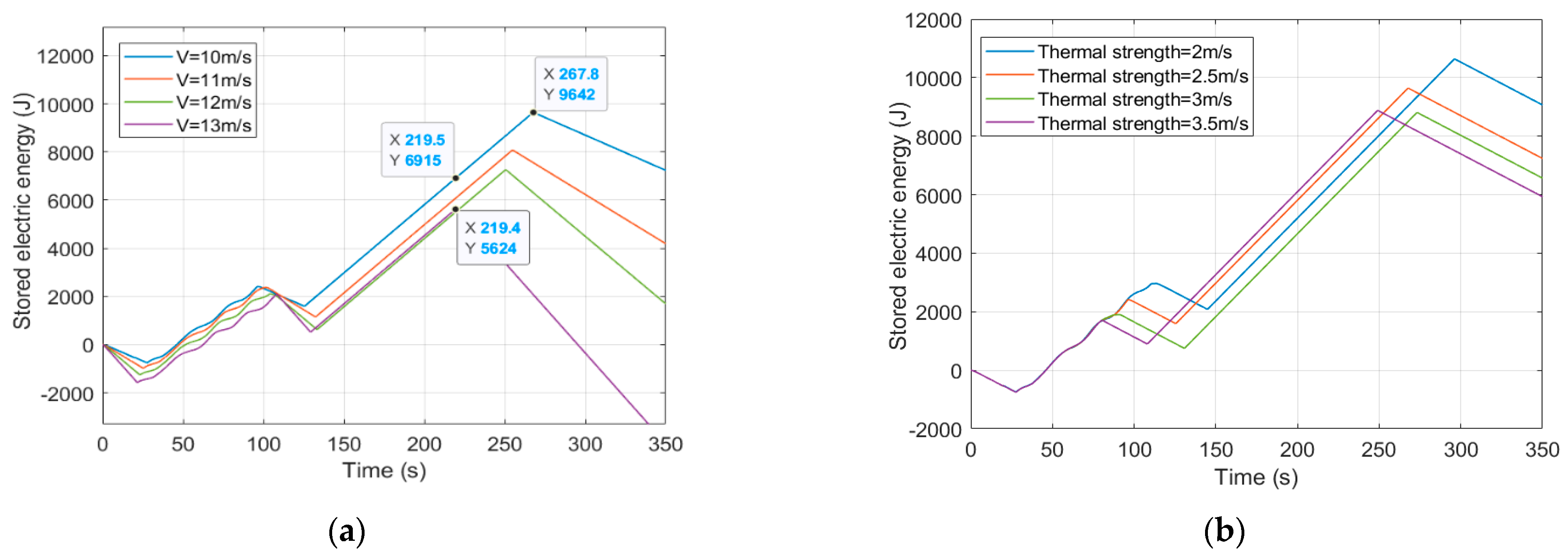
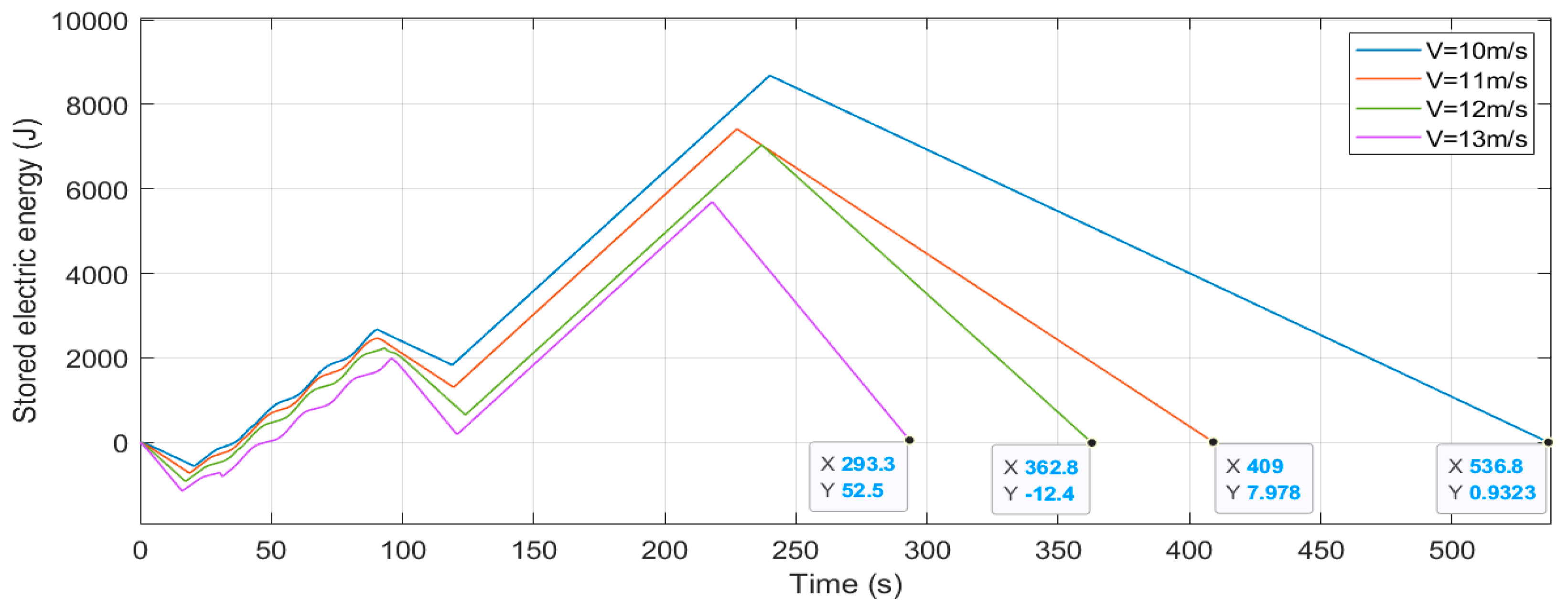
- Both power and time play significant roles in the electric energy harvested from thermals. Velocity and thermal strength independently affect the gliding and soaring time, thereby influencing the electric energy storage at the same power.
- (4)
- The concept of equivalent endurance is put forward to evaluate the extra energy that the SUAV harvests from a thermal compared to a direct flight condition.
- (5)
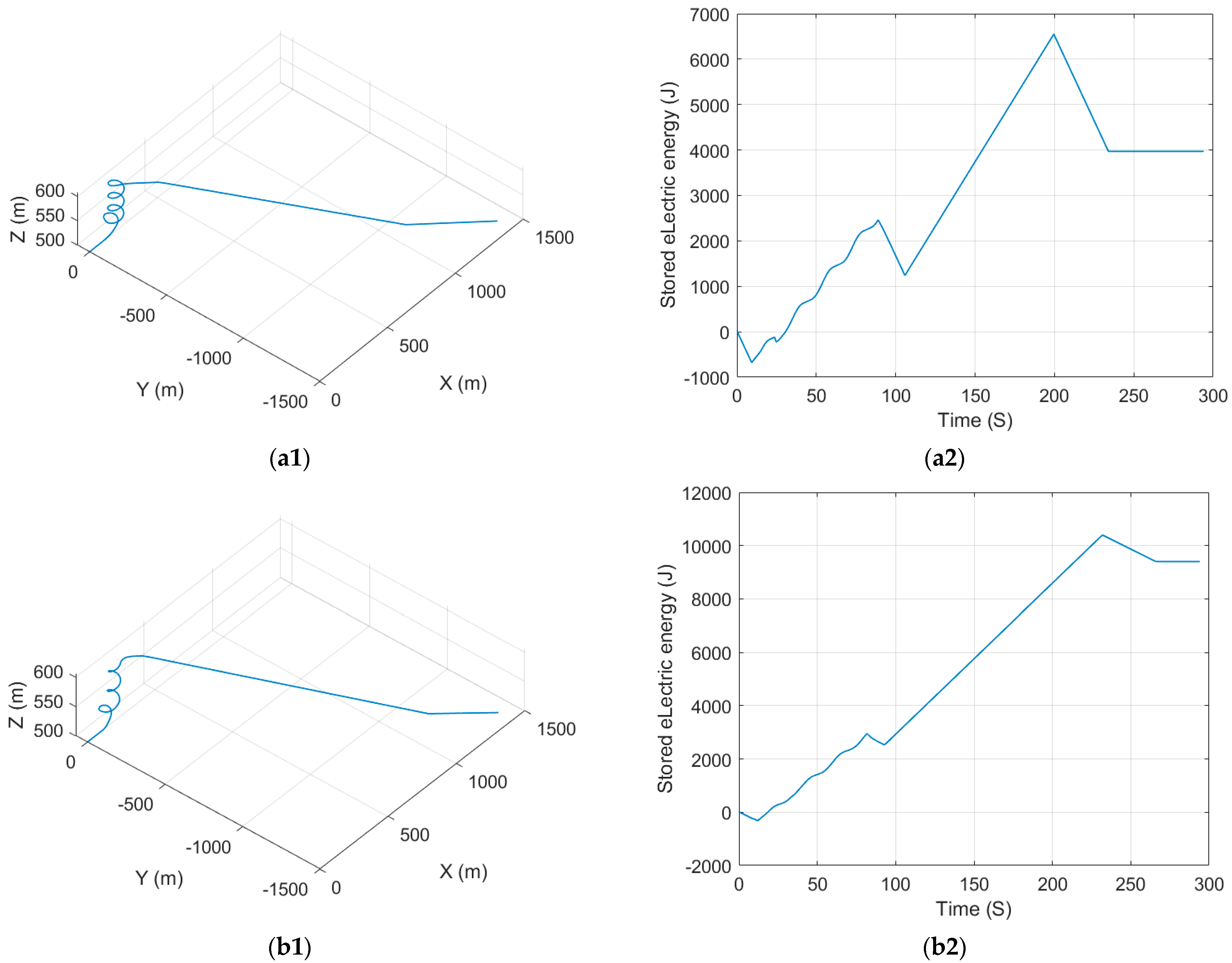
- The time constraint is considered to obtain the most appropriate velocity for the SUAV by soaring to meet possible mission conditions. The SUAV’s chosen velocity is influenced by the limited time and thermal strength.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gao, X.Z.; Hou, Z.X.; Guo, Z.; Chen, X.Q. Reviews of methods to extract and store energy for solar-powered aircraft. Renew. Sustain. Energy Rev. 2015, 44, 96–108. [Google Scholar] [CrossRef]
- Hu, S.Y.; Ni, W.; Wang, X.; Jamalipour, A. Disguised Tailing and Video Surveillance with Solar-Powered Fixed-Wing Unmanned Aerial Vehicle. IEEE Trans. Veh. Technol. 2022, 71, 5507–5518. [Google Scholar] [CrossRef]
- Huang, H.L.; Savkin, A.V. Energy-efficient decentralized navigation of a team of solar-powered UAVs for collaborative eavesdropping on a mobile ground target in urban environments. Ad Hoc Netw. 2021, 117, 102485. [Google Scholar] [CrossRef]
- Lun, Y.B.; Yao, P.; Wang, Y.X. Trajectory Optimization of SUAV for Marine Vessels Communication Relay Mission. IEEE Syst. J. 2020, 14, 5014–5024. [Google Scholar] [CrossRef]
- Li, K.; Wu, Y.; Bakar, A.; Wang, S.; Li, Y.; Wen, D. Energy System Optimization and Simulation for Low-Altitude Solar-Powered Unmanned Aerial Vehicles. Aerospace 2022, 9, 331. [Google Scholar] [CrossRef]
- Allen, M. Updraft Model for Development of Autonomous Soaring Uninhabited Air Vehicles. In Proceedings of the 44th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 6–12 January 2006. [Google Scholar]
- Kahveci, N.E.; Ioannou, P.A.; Mirmirani, M.D. Adaptive LQ Control with Anti-Windup Augmentation to Optimize UAV Performance in Autonomous Soaring Applications. IEEE Trans. Control Syst. Technol. 2018, 16, 691–707. [Google Scholar] [CrossRef]
- Walton, C.; Kaminer, I. Alternate Strategies for Optimal Unmanned Aerial Vehicle Thermaling. J. Aircr. 2018, 55, 2347–2356. [Google Scholar] [CrossRef]
- Allen, M.; Lin, V.; Samuel, T. Guidance and Control of an Autonomous Soaring Vehicle with Flight Test Results. In Proceedings of the 45th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8–11 January 2007. [Google Scholar]
- Tabor, S.; Guilliard, I.; Kolobov, A. ArduSoar: An Open-Source Thermalling Controller for Resource-Constrained Autopilots. In Proceedings of the 25th IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018. [Google Scholar]
- Kahn, A.D. Atmospheric Thermal Location Estimation. J. Guid. Control Dyn. 2017, 40, 2359–2365. [Google Scholar] [CrossRef]
- Notter, S.; Gross, P.; Schrapel, P. Fichte, Multiple Thermal Updraft Estimation and Observability Analysis. J. Guid. Control Dyn. 2020, 43, 490–503. [Google Scholar] [CrossRef]
- Chung, J.J.; Lawrance, N.R.J.; Sukkarieh, S. Learning to soar: Resource-constrained exploration in reinforcement learning. Int. J. Robot. Res. 2015, 34, 158–172. [Google Scholar] [CrossRef]
- Notter, S.; Schimpf, F.; Muller, G.; Fichter, W. Hierarchical Reinforcement Learning Approach for Autonomous Cross-Country Soaring. J. Guid. Control Dyn. 2022, 46, 114–126. [Google Scholar] [CrossRef]
- Schermann, E.; Omran, H.; Durand, S.; Kiefer, R. Stochastic Trajectory Optimization for Autonomous Soaring of UAV. In Proceedings of the 11th International-Federation-of-Automatic-Control (IFAC) Symposium on Nonlinear Control Systems, Vienna, Austria, 4–6 September 2019. [Google Scholar]
- Gunetti, P.; Thompson, H.; Dodd, T. Autonomous mission management for UAVs using soar intelligent agents. Int. J. Syst. Sci. 2013, 44, 831–852. [Google Scholar] [CrossRef]
- Cobano, J.A.; Alejo, D.; Vera, S.; Heredia, G.; Ollero, A. Multiple gliding UAV coordination for static soaring in real time applications. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013. [Google Scholar]
- Andersson, K.; Jones, K.; Dobrokhodov, V.; Kaminer, I. Thermal Highs and Pitfall Lows -Notes on the Journey to the First Cooperative Autonomous Soaring Flight. In Proceedings of the 51st IEEE Annual Conference on Decision and Control, Maui, HI, USA, 10–13 December 2012. [Google Scholar]
- Mateja, K.; Skarka, W.; Peciak, M.; Niestrój, R.; Gude, M. Energy Autonomy Simulation Model of Solar Powered UAV. Aerospace 2023, 10, 479. [Google Scholar] [CrossRef]
- Peciak, M.; Skarka, W.; Mateja, K.; Gude, M. Impact Analysis of Solar Cells on Vertical Take-Off and Landing (VTOL) Fixed-Wing UAV. Energies 2023, 16, 247. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, J.G.; Wang, H.L.; Su, G.F. A method of 3D path planning for solar-powered UAV with fixed target and solar tracking. Aerosp. Sci. Technol. 2019, 92, 831–838. [Google Scholar] [CrossRef]
- Wu, J.F.; Wang, H.L.; Huang, Y.; Zhang, M.H.; Su, Z.K. Solar-Powered Aircraft Endurance Map. J. Guid. Control Dyn. 2019, 42, 687–694. [Google Scholar] [CrossRef]
- Edwards, D.J.; Kahn, A.D.; Kelly, M.; Heinzen, S.; Scheiman, D.A.; Jenkins, P.P.; Walters, R.; Hoheisel, R. Maximizing net power in circular turns for solar and autonomous soaring aircraft. J. Aircr. 2016, 53, 1237–1247. [Google Scholar] [CrossRef]
- Huang, Y.; Wang, H.L.; Yao, P. Energy-optimal path planning for Solar-powered UAV with tracking moving ground target. Aerosp. Sci. Technol. 2016, 53, 241–251. [Google Scholar] [CrossRef]
- Wu, J.; Wang, H.; Li, N.; Yao, P.; Huang, Y.; Su, Z.; Yu, Y. Distributed trajectory optimization for multiple solar-powered UAVs target tracking in urban environment by Adaptive Grasshopper Optimization Algorithm. Aerosp. Sci. Technol. 2017, 70, 497–510. [Google Scholar] [CrossRef]
- Wu, J.F.; Wang, H.L.; Li, N.; Yao, P.; Huang, Y.; Yang, H.M. Path planning for solar-powered UAV in urban environment. Neurocomputing 2018, 275, 2055–2065. [Google Scholar] [CrossRef]
- Kim, S.H.; Padilla, G.E.G.; Kim, K.J.; Yu, K.H. Flight Path Planning for a Solar Powered UAV in Wind Fields Using Direct Collocation. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 1094–1105. [Google Scholar] [CrossRef]
- Oettershagen, P.; Stastny, T.; Hinzmann, T.; Rudin, K.; Mantel, T.; Melzer, A.; Wawrzacz, B.; Hitz, G.; Siegwart, R. Robotic technologies for solar-powered UAVs: Fully autonomous updraft-aware aerial sensing for multiday search-and-rescue missions. J. Field Robot. 2018, 35, 612–640. [Google Scholar] [CrossRef]
- Walton, C.; Kaminer, I.; Dobrokhodov, V.; Jones, K.D. New Insights into Autonomous Soaring. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control, Melbourne, Australia, 12–15 December 2017. [Google Scholar]
- Xin, W.; Yao, P.; Xie, Z. Comprehensive optimization of energy storage and standoff tracking for solar-powered UAV. IEEE Syst. J. 2020, 14, 5133–5143. [Google Scholar]
- Hottel, H.C. A simple model for estimating the transmittance of direct solar radiation through clear atmospheres. Sol. Energy 1976, 18, 129–134. [Google Scholar] [CrossRef]
- Duffie, J.A.; Beckman, W.A. Solar Engineering of Thermal Processes, 4th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2013. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sign | Title 2 | Value | Unit |
|---|---|---|---|
| I0 | Solar irradiance | 1367 | W/m2 |
| τb | Beam optical depths | 0.626 | N/A |
| τd | Diffuse optical depths | 1.707 | N/A |
| Ssolar | Solar cell area | 1.37 | m2 |
| S | Wing area | 1.75 | m2 |
| m | Mass | 6.93 | kg |
| ρ | Air density | 1.26 | kg/m3 |
| CD0 | Parasitic drag | 0.025 | N/A |
| ε | Oswald efficiency factor | 0.92 | N/A |
| Ra | Aspect ratio of the wing | 18.5 | N/A |
| ηprop | Propeller efficiency | 60% | N/A |
| ηsolar | Solar cell efficiency | 22% | N/A |
| SUAV velocity | 10 m/s | 11 m/s | 12 m/s | 13 m/s |
| Flight path angle | −4.4 degree | −4.5 degree | −4.8 degree | −5.1 degree |
| Thermal Strength | 260 s | 230 s |
|---|---|---|
| 2.5 m/s | 10 m/s | 13 m/s |
| 3.5 m/s | 9.2 m/s | -- |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Li, K.; Zhao, A.; Liu, H.; Li, Y.; Wen, D. Energy Analysis for Solar-Powered Unmanned Aerial Vehicle under Static Soaring. Aerospace 2023, 10, 779. https://doi.org/10.3390/aerospace10090779
Wu Y, Li K, Zhao A, Liu H, Li Y, Wen D. Energy Analysis for Solar-Powered Unmanned Aerial Vehicle under Static Soaring. Aerospace. 2023; 10(9):779. https://doi.org/10.3390/aerospace10090779
Chicago/Turabian StyleWu, Yansen, Ke Li, Anmin Zhao, Haobo Liu, Yuangan Li, and Dongsheng Wen. 2023. "Energy Analysis for Solar-Powered Unmanned Aerial Vehicle under Static Soaring" Aerospace 10, no. 9: 779. https://doi.org/10.3390/aerospace10090779