1. Introduction
Tilt-rotor aircraft, considered unconventional configurations, combine the capabilities of both helicopters and fixed-wing aircraft. This unique design allows them to perform maneuvers traditionally associated with both types of aircraft. Consequently, tilt-rotor craft can perform vertical takeoff and landing (VTOL) within confined spaces while also exhibiting the extended range and endurance characteristics of fixed-wing aircraft during forward flight. However, the change in configuration throughout operation, achieved through tilting the rotors, introduces significant complexities in terms of dynamic response. Notably, the transition phase between helicopter and fixed-wing modes undergoes drastic changes in dynamic behavior, requiring specific considerations for handling and control.
In designing the flight controller of a tilt-rotor aircraft, the dynamic behavior during the transition phase must be anticipated and specifically treated. This is necessary to obtain a good-closed response during this critical maneuver. The potential of rotorcraft, especially tilt-rotor UAVs, has attracted institutions to develop this type of UAV [
1,
2]. The design and development of control systems for multi-rotor aircraft using different techniques are elaborated in many works, for example, in [
3,
4]. Some control techniques that have been used in recent tilt-rotor control development are described in [
5], giving an insight into the challenges in the tilt-rotor flight control research area. An adaptive model inversion control approach is explored and implemented in [
6] for developing a tilt-rotor flight control system. While, in [
7], the non-linear Active Disturbance Rejection Control and Sliding Mode Control (SMC) methods are exploited for providing control of tilt-rotor aircraft in the transition flight phase. A robust (H-inf) linear control approach is proposed in [
8] for constructing a tilt-rotor flight control system. This approach bases its control parameter computation on a set of linear systems, each of which represents a different flight phase of the aircraft, including the transition phase.
A scheduled control system for a conceptual tilt-rotor aircraft is developed in [
9] by using two different controllers for providing body-axis horizontal and normal velocity commands. The handling of the quality criteria is also considered in this work. Flight control development for a quad-tilt-rotor UAV is discussed in [
10], where the modeling and control law design are arranged in a geometric setting to obtain an intrinsic control law, providing stability and tracking capability. While, in reference [
11], a control system for a hybrid UAV is discussed in which the controller is developed by implementing a control allocation scheme. The controller is constructed based on a linear approach and aims to tackle actuator saturation and disturbance problems. A robust reconfigurable control that can anticipate actuator failure is developed and implemented for a hybrid tilt-rotor system [
12]. A switching controller strategy is employed to provide changes in controller parameters for some predefined failures. Research conducted in [
13] presents works in developing a control allocation strategy for a tilt-rotor system, along with its implementation and flight test for evaluating the developed control scheme performance.
The multifaceted challenges associated with tilt-rotor aircraft development have driven continuous research efforts in the realm of control methodologies and strategies aimed at achieving desired performance outcomes. Data-driven learning techniques, fueled by rapid advancements in computational power, have emerged as a prominent approach within this diverse landscape. These learning-based methods offer compelling capabilities for enhancing controller performance through the provision of parameter adjustment and adaptation mechanisms. Ref. [
14] presents insightful discussions on the application of data-learning methods across various domains, effectively demonstrating their potential for addressing diverse engineering challenges. Furthermore, reference [
15] elaborates on the implementation of a neural network scheme utilizing a data-driven learning mechanism for computing controller parameters in the context of aircraft flight control systems. Notably, reference [
16] delves into the implementation of this learning-based technique for tilt-rotor systems, highlighting its potential for achieving in-flight control parameter adaptation.
The application of neural network schemes in the context of VTOL control has been explored in numerous research endeavors. Notably, ref. [
17] elaborates on the implementation of a neural network scheme for adapting controller parameters within a PID framework. Moreover, ref. [
18] investigates the utilization of a neural network-based ADRC for controlling a six-rotor UAV, demonstrating the efficacy of online parameter adjustment and improved trajectory tracking performance. The potential of learning mechanisms for addressing abnormal conditions, including failures, is further explored in reference [
19], which details the development of a neural network-based adaptive approach for constructing a fault-tolerant control system for UAVs. Finally, ref. [
20] presents and discusses various learning-based methods, particularly deep reinforced learning techniques, for drone control applications, providing valuable insights into the features and potential of these approaches.
The implementation of deep reinforcement learning for flight control applications has been extensively explored in numerous studies, as exemplified by references [
21,
22]. In reference [
23], a proof-of-concept demonstration is presented for the implementation of a reinforced learning method for a multicopter flight control system, where training data is generated via numerical simulation. The resulting controller is subsequently evaluated within the same simulated environment, exhibiting its ability to achieve satisfactory closed-loop performance. Further works presented in references [
24,
25,
26] elaborate on the potential and capabilities of deep learning methodologies for constructing various types of flight control systems for UAVs, enabling the attainment of desired performance objectives, such as stability and accurate tracking, across various flight phases, including the transition phase for tilt-rotor UAVs.
Some of the works on machine learning control for multi-copter systems [
23,
24], and also for tilt-rotor systems [
25,
26], employ a reinforced learning approach, where the learning process is regulated using the reward function and cumulative cost value. In those reinforced schemes, a configuration called the actor–critic network is utilized, where the input–output variables of the controller model are initially defined, requiring a priori comprehensive knowledge about the behavior of the controlled system. The networks are trained using simulated data that is generated using Gazebo simulation software [
23,
26] or the more accomplished digital twin environment [
24,
25].
This paper discusses the development of a flight trajectory controller for a tilt-rotor UAV using a deep learning approach. The inherent complexity of tilt-rotor dynamics, particularly during the transition phase, presents a significant challenge for traditional control methods. In response, this study explores the potential of deep learning, known for its effectiveness in handling complex and non-linear systems with unmodeled dynamics. However, for initial feasibility analysis and model exploration, this investigation focuses on the simpler cruise phase. This initial application aims to gain valuable insights and establish a robust deep learning framework without introducing the full complexity of the transition phase. These learned insights and the established framework will then be leveraged in subsequent stages to develop a comprehensive control model that tackles the intricate dynamics of the transition phase and optimizes tilt-rotor performance across all flight regimes. In addition to that, a deep learning approach is employed in this research in order to construct a development framework that, instead of depending solely on the formal and structured representation of the plant dynamics for providing the required input–output relations, it can accommodate information obtained from real-world control actions or from best practice in real control system implementation, to determine the control parameters. The approach that uses the exploitation of data to obtain the dynamic representation of the plant can also, to some extent, reduce the need for the availability of a high-fidelity model for representing the dynamic complexity of the controlled system.
As has been described previously, the proposed control development framework uses data that may come from simulation, or later can also be derived from real test data, as the learning data. More direct relation between the control inputs and the system response are exploited in the developed framework. In this approach, a feature selection procedure is employed to determine the correlation between input–output data, which is important for determining the controller model, i.e., to determine the control variables and the feedback variables required to produce effective controls, especially when redundant effectors are involved. This selection procedure enables the determination of a system input–output relation based on data, to construct the required closed-loop structure. Further, in the construction of the tracking controller, the data used for the learning process are the desired variable tracking error data, which can produce a quite flexible and robust controller in terms of providing good tracking performance for different/various commanded references. The proposed framework is then applied to a UAV configuration with two main tilt-able rotors, and one fixed small rotor, a configuration of which produces a statically unstable flying system.
Three model controllers are developed, including speed hold, altitude hold, and roll hold systems. The tilt-rotor UAV being developed at the Flight Mechanics and Operations Research Group, Faculty of Mechanical and Aerospace Engineering (FMAE), Institut Teknologi Bandung (ITB), is employed as a flight vehicle in which the controller will be implemented. For the present case, this drone is modeled in the X-Plane flight simulator to mimic its characteristics [
27]. The performance and characteristics of the UAV model are constrained by the X-Plane flight simulator’s capabilities and limitations.
2. Tilt-Rotor UAV and Methods
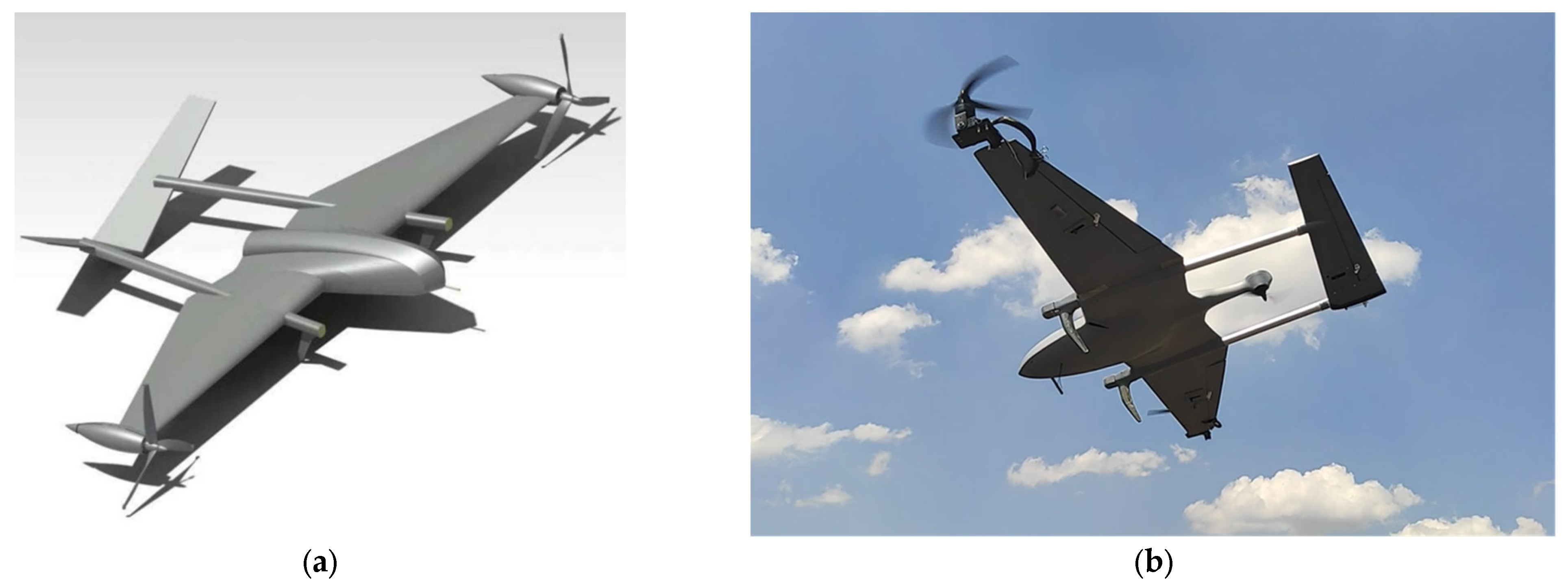
This paper presents the development of a small tilt-rotor UAV at the Flight Mechanics and Operations Research Group FMAE-ITB, Indonesia, intended as a platform for flight control development and testing. The UAV, illustrated in
Figure 1, possesses a maximum takeoff weight (MTOW) of 4.5 kg, a wingspan of 1.8 m, and a fuselage length of 1.1 m. It is equipped with two main rotors mounted at the tips of the left and right wings, respectively, and a smaller tail rotor fixed to the rear fuselage. The main rotor shafts can tilt around the spanwise axis, transitioning from horizontal to vertical orientation, while the tail rotor axis remains fixed in the vertical direction. All rotors are driven by electric motors with adjustable rotational speeds. The main rotors provide the primary thrust for horizontal flight and contribute to lift generation during vertical flight (hover), while the smaller tail rotor offers pitch control, particularly during hover or vertical flight maneuvers. Additionally, the UAV incorporates an inverted V-tail for stabilization. Available control surfaces include the ruddervator on the tailplane (functioning as both elevator and rudder) and ailerons on each wing. Flight control instruments, sensors, and actuators are strategically positioned within the UAV airframe.
This tilt-rotor UAV exhibits three distinct flight phases: helicopter/rotorcraft, fixed-wing, and transition, see
Figure 2. During the helicopter/rotorcraft phase, which encompasses hover and vertical flight, the rotors function as the primary lift generators. In contrast, the fixed-wing phase, associated with horizontal flight, utilizes the wing as the main lift generator, while the main rotors primarily provide thrust for forward propulsion. Additionally, control surfaces become the primary device for controlling the UAV’s attitude and maneuvering during the fixed-wing phase.
During the transition phase of tilt-rotor flight, the gradual adjustment of the main rotor orientation dynamically alters the system’s behavior. The combination of main rotor thrust, tail rotor thrust, aileron, and ruddervator deflection must be regulated correctly during this phase so that the transition can be performed safely and smoothly. A control system that can manage the maneuver by computing the required thrust and control surface deflection is critically needed. A feedback control scheme can usually be employed, as all the control variables can be computed based on the desired parameter setting and the sensed UAV response variables.
2.1. Tilt-Rotor Flight Dynamic
As has been discussed previously, the dynamic behavior of a tilt-rotor system is significantly affected by the change in the main rotor orientation. To obtain a quantitative representation of the tilt-rotor flight dynamic, a mathematical model incorporating the tilt-able main rotor thrust must be constructed. By evaluating the forces and moments that work on the vehicle, as depicted in
Figure 3, the following longitudinal flight model can be derived based on equilibrium condition of these forces and moments.
where
= Speed projected to Body frame in -axis direction ();
= Speed projected to Body from in -axis direction ();
= UAV aerodynamic center;
, = Horizontal and vertical distance from UAV to ;
= Horizontal and vertical distance from main thrust line to ;
= Horizontal and vertical distance from tail rotor thrust line to ;
= Horizontal and vertical distance from tail lift to ;
= Pitch angle;
= Angle of attack;
= Pitch rate;
= Angle between main rotor thrust and -axis Body frame;
= Angle between tail rotor thrust and -axis Body frame;
= Mass of the UAV;
= Momen of inertia about the -axis;
= Weight of the UAV;
= Main rotor thrust;
= Tail rotor thrust;
= Tailplane lift;
= Wing body lift;
= Drag;
= Aerodynamic moment at aerodynamic center.
Based on Equations (1)–(3), the trimmed model for a given flight condition can be determined. The linearized UAV dynamics are then obtained by linearizing this model, which is shown in the state-space formulation. This approach allows for the generation of a collection of linearized models, each representing a specific operating point.
where
and
,
and
represent aileron and ruddervator deflection, respectively, while other symbols have been described previously.
Employing the derived linearized model, the flight characteristic of the tilt-rotor UAV at some flight conditions can be analyzed at designated operating points via a linear analytical approach. The dynamic attributes of the system, contingent upon specific configurations and flight conditions, are encapsulated by the eigenvalues of each corresponding linearized model. These eigenvalues, presented in
Table 1 and
Table 2, offer valuable insights into the stability, controllability, and transient response of the UAV under various operational scenarios.
Table 1 shows that the variation in flight conditions; in this example, the change in speed (
), affects the characteristics of the tilt-rotor, which generally becomes more stable, particularly for motion related to non-oscillatory mode. This behavior is captured by the real eigenvalue, which becomes more negative as the speed increases. The speed in the present case is the kinematic speed along the UAV trajectory, while the altitude
is the altitude measured from the ground. Conversely,
Table 2 shows that the change in configuration, in this case the tilt-rotor angle, significantly alters the characteristic of the tilt-rotor response. The examples above demonstrate that the tilt-rotor configuration may produce unpredicted responses when its configuration and flight conditions are varied.
Table 2 can also be viewed as an indication that in the transition phase because when the main rotor tilt angle is varied, the behavior of the system will change significantly. Therefore, the correct anticipation by the control system must be properly designed.
2.2. Flight Trajectory Control (Longitudinal)
Based on the required maneuver to operate the tilt-rotor from hover to horizontal flight and vice versa, a flight control will be developed for managing and controlling the UAV at each of the flight phases. A framework to develop the controller is constructed by first dividing the processes into each flight phases’ development and later on constructing the procedure and controller at the transition phase. At the horizontal flight phase, a flight trajectory control is developed for regulating the flight path angle of the tilt-rotor. This first development phase is conducted in such a way that a suitable controller feature can be constructed that later on will also be used as the platform for the controllers applied to other flight phases. As previously explained, a deep learning approach will be employed to construct the controller models, ensuring adaptability and robustness across various flight conditions.
2.3. Method
As already mentioned previously, this paper explores the feasibility of applying deep learning for designing the flight control system of a tilt-rotor UAV currently under development by the Flight Mechanics and Operations Research Group at ITB. For the current phase, the control model development will utilize simulated data generated from the X-Plane flight simulator. Two primary research questions guide this work: (1) Can the deep learning-based model achieve sufficient performance to control the tilt-rotor UAV in calm wind conditions?; and (2) does the model, trained under wind-free conditions, exhibit robustness when encountering wind disturbances? This paper addresses these questions and outlines the development methodology of the deep learning-based control model, as detailed below.
The deep learning-based control model development will adhere to a structured approach, as depicted in
Figure 4. The process starts with the “Data Gathering” step, where relevant data for the problem at hand is collected. PID controllers are employed in this step to reduce the possibility of human error in controlling the drone. This will ensure the data collected has less error and is expected to provide good data with rich information content.
The second step, “Data Preprocessing”, involves cleaning and preparing the data. To ensure that it is in a format that the deep learning model can use, of which the data preprocessing step also includes normalization and unit conversion. Within the domain of Machine Learning, and particularly within the subfield of Deep Learning, data normalization is demonstrably effective in enhancing the convergence rate and promoting training stability, as presented by [
28]. Consequently, its inclusion as a preprocessing step is essential for the present research.
Following that, the “Feature Selection and Feature Engineering” step involves identifying and extracting the most relevant features from the collected data. The Spearman correlation coefficient and physical interpretation of features are employed to select the most relevant parameters used to develop the control model.
This step is then followed by the “Define Control Model Architecture” step. At this step, manual input is required from the user to set the deep learning model architecture. This entails specifying the number of layers, the type of network, optimization method, and number of epochs. Once the model structure has been defined, the training phase begins by utilizing the data that was prepared in the preceding step. This training will generate the deep learning-based control model.
The loss function is evaluated and, if it provides the expected result, the training process is terminated and the model will be evaluated in the “Model Validation” step. The model validation step employs data that has never been seen before. It is expected that the performance of the model during the validation process will be the same as that of the training model. However, it is very common that the model’s performance during the validation step is less than that of the training model, as it is hard to evaluate the model on unseen data. In this case, an engineering judgment is often required to terminate the iteration. These three steps, Define the Model Architecture, Train the Model, and Validate the Model, are an iterative process. The process will be terminated after the loss value produced by the model is as expected, or it can also be concluded via the engineering judgement. Sometimes, the process must be re-started from the data-gathering step because the trained model has not achieved the expected performance despite multiple iterations of modifying the model’s architecture. If this case arises, new data from a new experiment is needed and the process is repeated from the beginning.
Once the model achieves the expected level of performance, the developed model will be employed in the prediction step. This step involves predicting the output based on new data. Model prediction is the final stage of the deep learning-based control model development. The model obtained during this process is ready to deploy to the real system. For the case at hand, the final model is deployed in the X-Plane flight simulator and it is expected to perform its role as the controller for the UAV. Each of these steps will be further elaborated in detail in
Section 3.
5. Discussion
As already presented in
Section 4, two experiments are conducted to evaluate the performance of the developed control model. The initial scenario provided a baseline by assessing the model’s effectiveness under wind-free conditions. Subsequently, the second scenario introduced two distinct wind disturbances to the UAV dynamics, aiming to investigate the model’s robustness to realistic environmental perturbations. This sequential approach facilitated a comprehensive evaluation of both intrinsic performance and robustness to external interference.
The first scenario assesses the performance of the control model by setting two altitude setpoints, where the first setpoint is 110 m, followed by 120 m. The UAV is initially placed at 100 m while the control model is actively controlling the UAV; as such, the first setpoint is altered. As presented in
Figure 11, the control model is able to track the setpoint with a small overshoot at the beginning. For the remaining time of observation at this setpoint, the control model closely tracks the altitude. The speed hold system is also actively working to keep the speed at the setpoint of 8 m/s and its performance is also closely monitored by comparing the actual speed with the setpoint. As presented in
Figure 11, the speed hold system provides an adequate performance as the deviation of the actual speed with the setpoint is small, specifically less than 1 m/s. Additionally, the roll hold model demonstrated satisfactory performance. While a transient deviation occurred upon setpoint change, the actual roll angle remained within one degree, indicating adequate roll control. Collectively, these results demonstrate the effectiveness of the deep learning-based control model under wind-free conditions.
Building upon the wind-free evaluation, the second scenario investigated the model’s robustness by introducing two distinct wind perturbations while the target altitude is set to 110 m. The first wind speed is set to ten percent of the cruise speed while the target altitude is introduced simultaneously with the setpoint change.
Figure 13b illustrates the altitude hold system’s ability to effectively track the setpoint despite the external disturbance. Similarly, the speed hold system maintained satisfactory performance, as evidenced by the minimal deviation between actual and desired speeds, as presented in
Figure 13c. Correspondingly, the generated inputs show small fluctuations due to the compensation of the external disturbances. Overall, as indicated in
Figure 12, the control model exhibited robustness, suggesting its capability to handle realistic environmental disturbances without significant performance degradation.
Further intensifying the evaluation, a 2 m/s step-function wind disturbance is introduced to the UAV dynamics, while simultaneously shifting the setpoint to 110 m, see
Figure 13a. This triggered the control model to actively adjust its control strategies. As depicted in
Figure 13b, the altitude hold system is capable of closely tracking the setpoint despite the external perturbation. Similarly, the speed hold system demonstrates satisfactory performance, evidenced by the minimal deviation between actual and desired speeds in
Figure 13c. While a slight discrepancy of less than 1 m/s (to be within 6%) was observed between the target and actual speed, this deviation is regarded negligible within the context of the experiment. Analysis of the control and throttle inputs generated by the model,
Figure 13d–f, reveals that the wind speed has minimal impact. Significant changes in these inputs only occur in response to the setpoint change, representing corrective actions to achieve the desired altitude. In conclusion, consistent with the previous scenario, the control model demonstrates its robustness to external disturbances, maintaining satisfactory performance under the 2 m/s wind perturbation.
Based on the investigation conducted in this paper, our research reveals some findings as presented shortly. In the context of the deep learning-based control model development, the quality of the data does significantly affect the performance of the control model. In this research, the quality of the training data is significantly improved by incorporating a PID controller during the data-gathering process. Additionally, the PID controller also helps in reducing the intervention of human error in controlling the UAV, particularly the tilt-rotor UAV at hand, which is naturally hard to control.
Secondly, the research highlights the crucial role of feature selection. While the deep learning approach possesses inherent feature selection capabilities, this can lead to significantly extended training times. Furthermore, the inclusion of many unrelated parameters during the training phase tends to produce models with overfitting performance. Some statistical measures, such as the correlation coefficient, can be employed to help in finding the most significant parameters to the model. Furthermore, modifications of features based on recorded features also contribute to a significant performance of the control model. The feature modification is facilitated via a so-called feature engineering in the context of Deep Learning field. For the present case, two additional features are incorporated in the training phase, i.e., altitude error and airspeed error, which capture the behavior of the system and contribute to the improvement of the control model significantly.
Finally, the investigation reveals the robustness of the developed control model. It is found that the deep learning-based control model, trained in wind-free conditions, provides a robust control model to withstand external disturbances, while intrinsically, it demonstrates its effectiveness in the wind-free condition.
Although the employed data were collected from an X-Plane flight simulator model, the developed deep learning-based control model demonstrates potential as an alternative control strategy for tilt-rotor UAVs, whose complex dynamic characteristics pose challenges compared to conventional fixed-wing UAVs. As future works, we plan to extend the flight phase control model development. The present work concentrates on control model development for the cruise flight phase. Future research works will focus on extending this to the more challenging transition phase. Furthermore, incorporating a data-driven flight dynamic model, estimated via System Identification of flight test data, is planned to improve the fidelity of the UAV flight dynamics model and allow for broader exploration of various flight phases.
6. Conclusions
The tilt-able configuration can provide a good combination of the flexibility of a rotorcraft and efficiency of a fixed-wing aircraft. However, this configuration inherently introduces complexities due to significant shifts in dynamic characteristics and behavior which require specific consideration and treatment, especially in relation to the control of its response and motion. The complexity of the dynamics behavior means that a set of complex equations is required for representing its dynamics, as well as to further be the basis for developing a closed-loop system. Data learning-based methods can be explored and employed for such situations, where data from “good practice” in controlling the system can be used for constructing the control parameter, instead of deriving it from the mathematical model. At the initial stage, even data from a numerical simulation process can be exploited for determining the structure of the controller and predicting the control parameters.
This paper successfully trained a deep learning-based flight control model utilizing X-Plane flight simulator data. Subsequent evaluation within the same environment demonstrated the model’s effectiveness in tracking desired setpoints with satisfactory performance. Under controlled wind-free conditions, the performance of the developed controller was evaluated via the application of two distinct setpoints. The results demonstrated the controller’s capability to effectively track both reference altitudes, showcasing its accurate and responsive feature. Furthermore, the robustness of the system was explored via its integrated hold systems, encompassing both speed and roll holds. These components displayed tracking fidelity, maintaining desired setpoints with minimal deviations, as evidenced by errors below 0.5 m/s for speed and 0.6 degrees for roll, respectively. The effectiveness of the control model extended beyond static wind-free scenarios, exhibiting a noteworthy degree of robustness against external disturbances. This robustness was further validated via simulations, introducing controlled wind speeds into the model. It was found that these simulations revealed insignificant impacts on the control model’s performance, with induced speed errors remaining within a modest 6% margin. These findings collectively prove the effectiveness and robustness of the developed deep learning-based control model, highlighting its potential for successful implementation in practical applications.



 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}