
Micro UAVs with Fixed Wings: Design, Technological Solutions, and Tests

 ,
,  ,
,  , and
, and 
Abstract
:
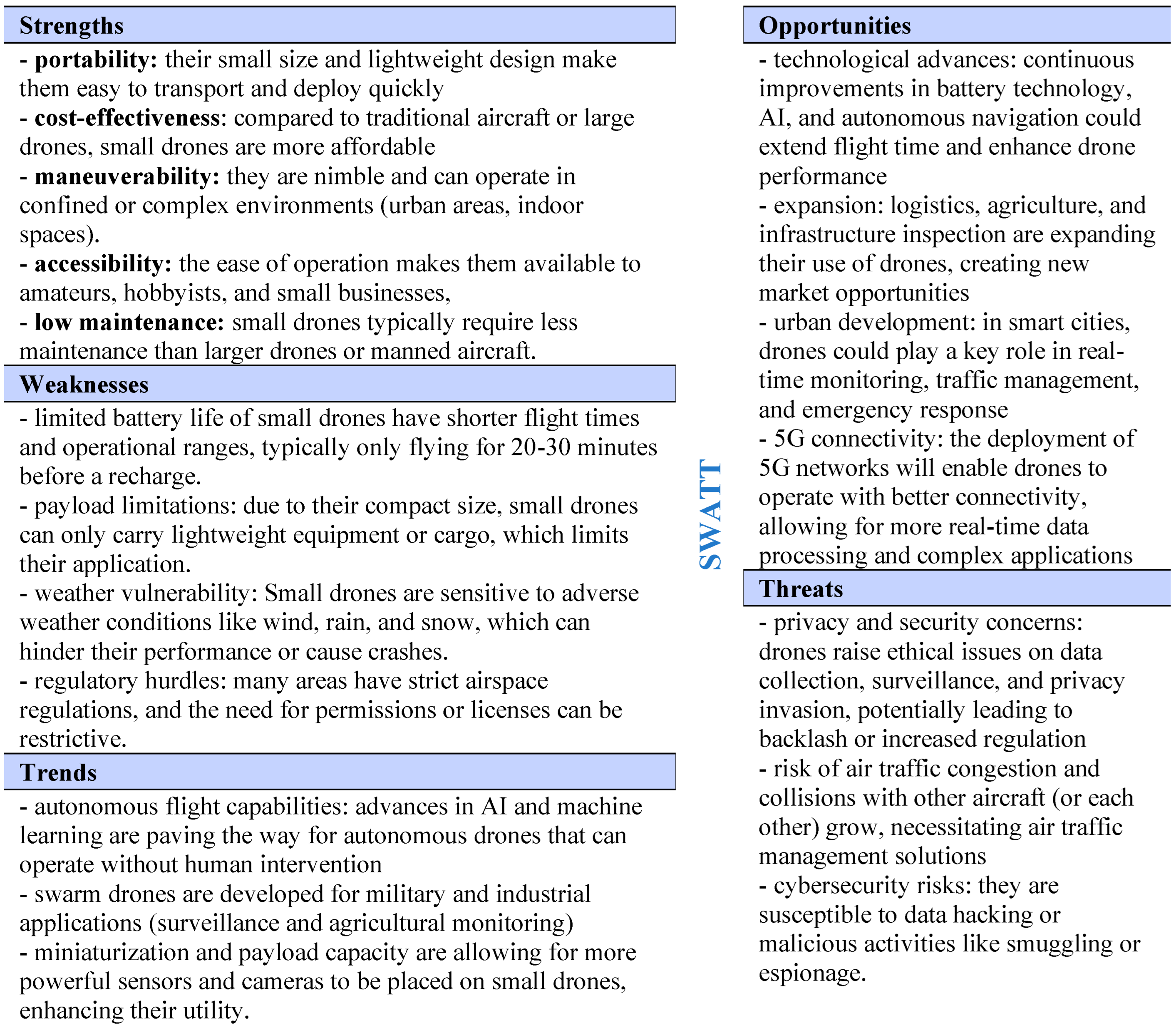
1. About Small Drones
- Advanced autonomy: new-generation drones are equipped with high-precision navigation and control systems, allowing them to perform autonomous flights and perform complex tasks without human intervention;
- Payload capabilities: modern drones are capable of carrying various types of payloads, such as high-resolution cameras and video cameras, specialized sensors for environmental monitoring, and delivery equipment;
- Advanced aerodynamic performance: the aerodynamic design of next-generation drones is optimized to maximize flight efficiency and provide superior stability and maneuverability;
- Connectivity and communication: modern drones are equipped with advanced communication technologies, allowing them to stay connected and transmit data to operators and other devices in real time.
- –
- Composites with carbon fibers are lightweight, strong, durable, and resistant to corrosion; they offer high strength-to-weight ratios, making them ideal for drone frames; they also absorb vibrations, enhancing flight stability; but they are expensive and brittle when subjected to significant impacts [12].
- –
- Polymers (e.g., ABS, polypropylene, etc.), blends, and composites containing polymers are inexpensive, lightweight, and easy to mold. Plastics are cost-effective and easy to manufacture. They are flexible and resilient, allowing drones to handle minor impacts without damage. Plastic is not as strong as other materials like carbon fiber, and it is less durable in harsh environmental conditions.
- –
- Aluminum alloys are lightweight, corrosion-resistant, and affordable; they are easy to shape, and their strength-to-weight ratio make them good materials for the production of drone parts such as motor mounts or arms. However, they are weaker than carbon fibers and less impact-resistant.
- –
- Foams (expanded polypropylene—EPP—and so on) are lightweight, impact-absorbing, and inexpensive; foams are commonly used in hobbyist drones due to their low cost and excellent impact resistance; they are useful for applications where weight savings are critical; however, they have short life expectancy and are more prone to wear over time than harder materials.
- –
- Magnesium alloys are lightweight and high-strength, displaying excellent heat dissipation properties. Magnesium alloys offer the strength of metals like aluminum but at a lower weight. They are also better at dissipating heat from motors and electronics, but they are more expensive and can corrode in certain conditions.
- –
- Graphene-based materials are ultra-lightweight, very strong, and highly conductive: while not widely used in drones yet, graphene holds immense potential for use in future drone technology due to its strength and conductivity, making them ideal for the production of structural parts and batteries. However, they are still in the experimental phase and expensive to produce in large quantities.
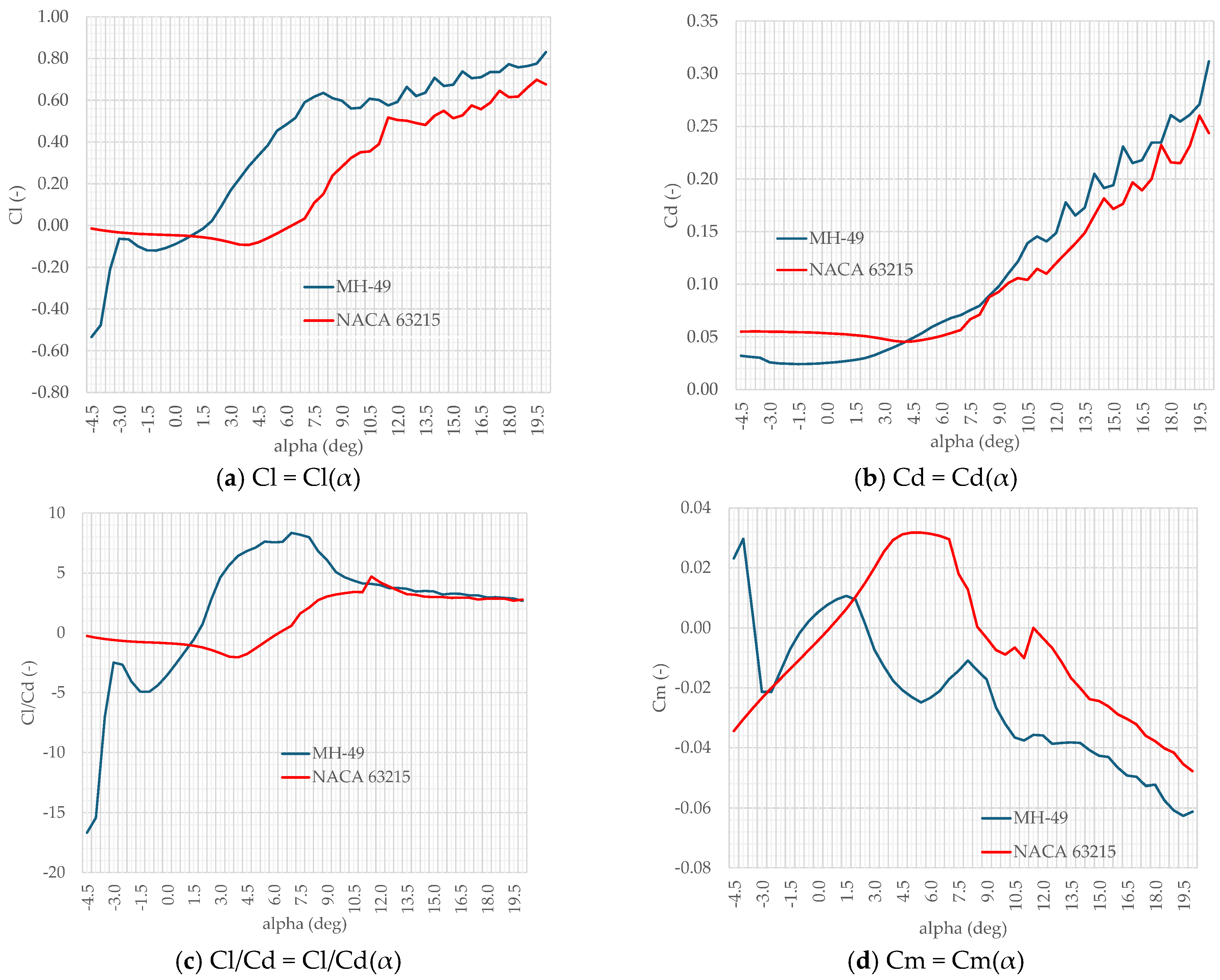
2. Arguments in Selecting the MH Wing Profile Selection

3. Fabrication of the Drone
3.1. Material Considerations
- –
- Low production costs: EPS is a low-production-cost material with a similar price to cardboard.
- –
- It can be obtained by in-mold expansion, which facilitates high-volume production and low-specific-cost technology, as validated in the packaging industry for household appliances and in any other sensitive products requiring high-protection packaging.
- –
- Superior aerodynamic capabilities: its production involves processing, which allows the production of wings with complex geometries, e.g., arrow-shaped wings and/or wings with variable airfoils in span, thus ensuring a significantly better aerodynamic performance than a straight wing that is processed from cardboard in the Corvi project.
- –
- The possibility of creating high-performance airfoils with accentuated tapers and complex shapes towards the trailing edge, which can significantly increase the diversity of UAV types.
- –
- EPS is stable over time and independent of humidity conditions and can be stored for a long time without noticeable changes in mechanical properties, offering more stability and durability.
- –
- UV resistance and operational without restrictions in humid, rainy, tropical or coastal conditions.
- –
- EPS has acceptable mechanical properties.
- –
- It provides a high degree of protection for on-board radio electronic equipment.
- –
- It allows fiberglass reinforcement, reinforcing critical areas such as the leading edge and trailing edge of the wing, with reinforcements necessary for structural protection, especially stress relief in critical areas, such as those relating to control surfaces.
- –
- Low radar detectability: EPS is transparent to radar waves, which makes UAVs constructed of this material extremely difficult to detect using radar. This offers a significant tactical advantage by reducing the radar signature, making the drones very difficult to detect.
- –
- Large-scale batch production: EPS allows the finished product to be obtained by in-mold expansion, which is much more efficient for high-volume than multiple board processing operations, which can increase costs and the complexity of production.
- –
- Geometric complexity: EPS allows for complex geometries and advanced aerodynamic airfoils, providing greater flexibility in the design of UAVs with superior aerodynamic performance, essential characteristics for UAVs with superior flight envelope performance.
- –
- Durability and resistance to environmental conditions: EPS is unaffected by moisture and is UV-resistant, making it suitable for use in a variety of environmental conditions, including humid or tropical environments; the paperboard, even when waxed, can be susceptible to damage in humid conditions, especially when in storage conditions for considerable periods in humid environments.
- –
- The protection of equipment: the mechanical properties of EPS provide better protection for on-board radio-electronic equipment, with an ability to absorb shock and vibration, and allow the processing of complex shaped cavities that can accurately support on-board equipment.
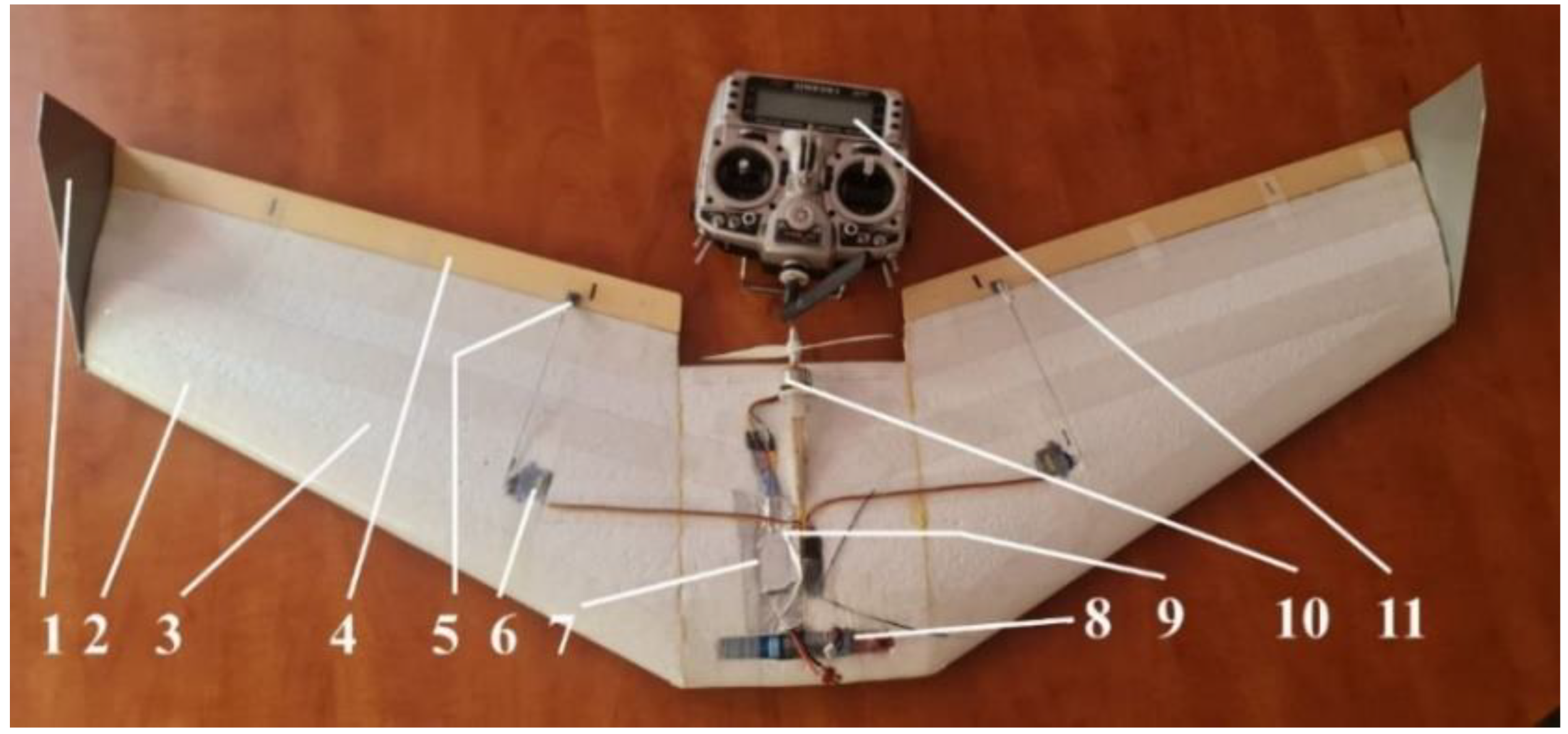
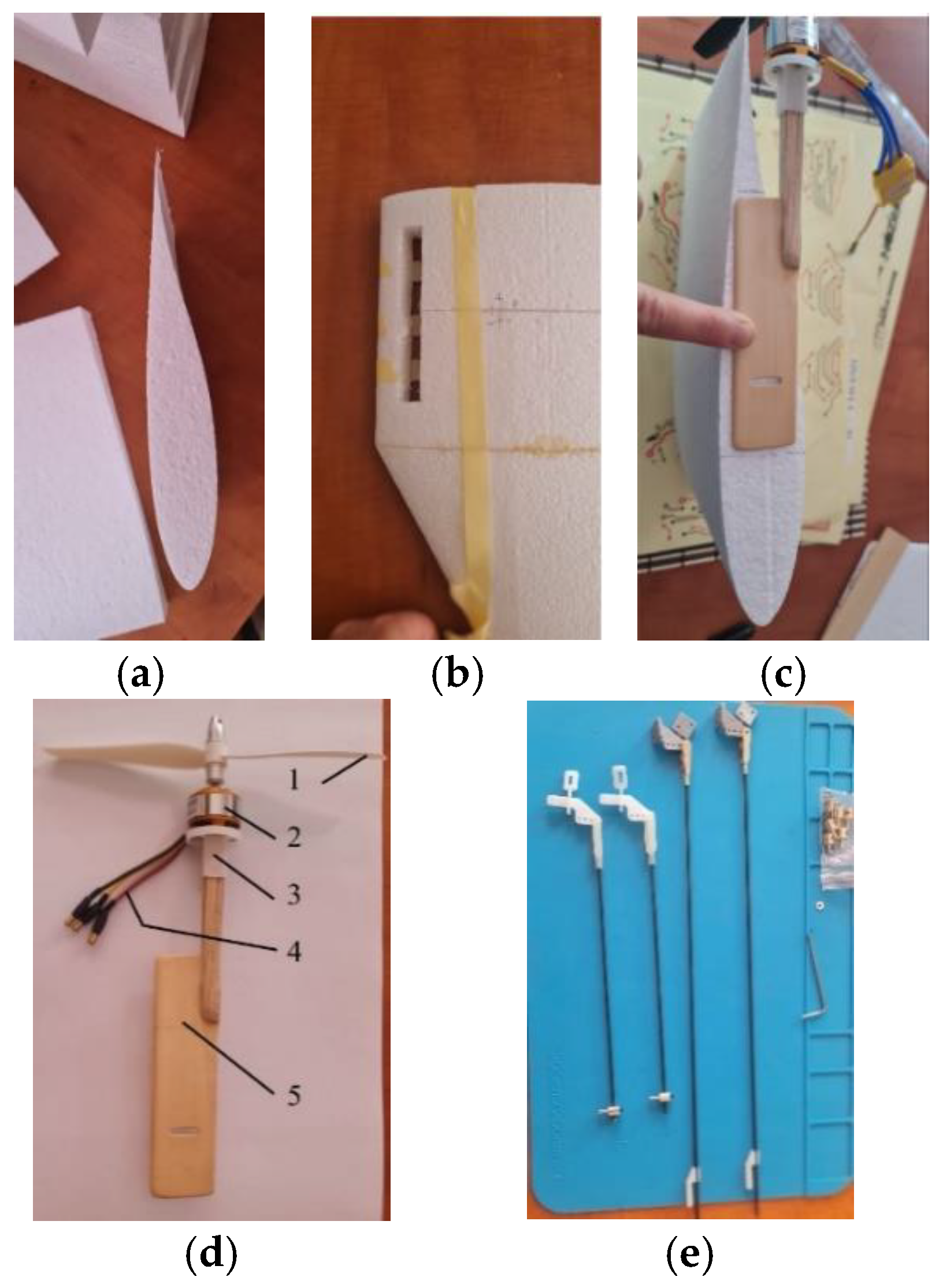
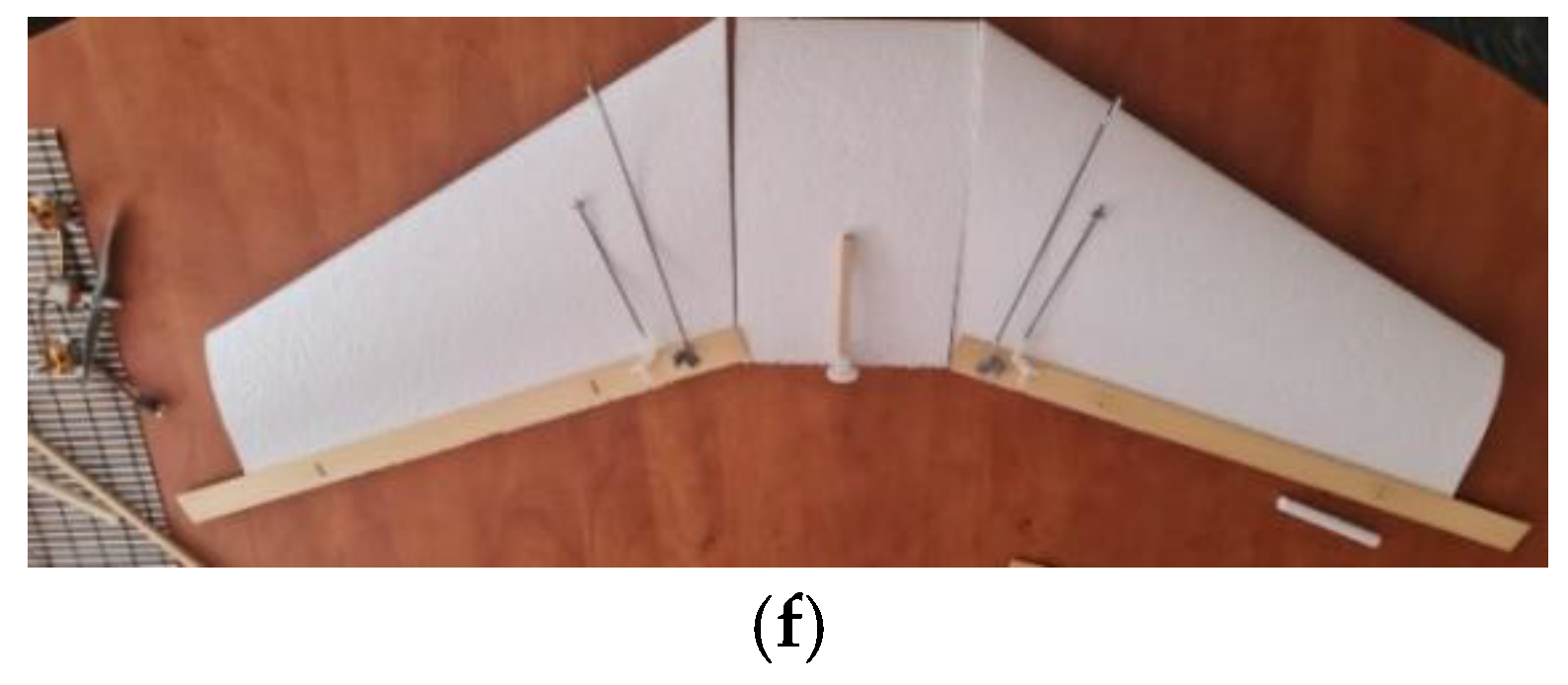
3.2. The Drone Components
4. Finite Element Analysis of the Body Structure Under Static Loading
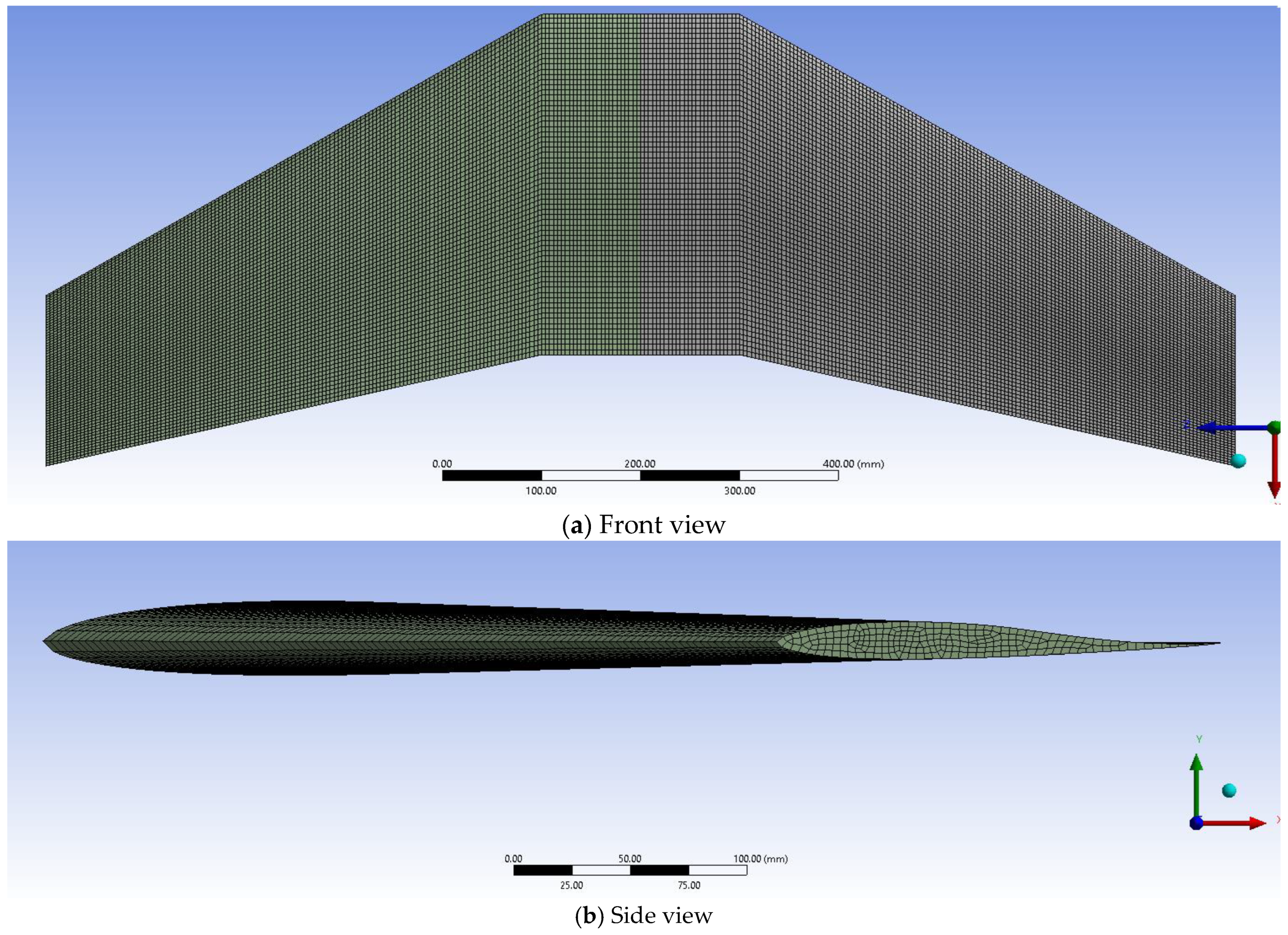
4.1. The Model of the Drone
4.2. Model Meshing and Material Constitutive Model
- –
- Isothermal regime: this is assumed because no traces of thermal damage are observed on the drone as it is made of a thermoset material and because the mechanical properties change little with temperature up to the point of material damage;
- –
- Perfectly smooth body: the stress and strain state study showed very low values of roughness parameters because the granular nature of polystyrene was not taken into account;
- –
- Elasto-plastic model for polystyrene: selecting from the literature survey on tests and models for plastics, bilinear–isotropic modeling with hardening is opted for based on experimental data provided by some researchers, with the equivalent plastic strain at break added as the failure criteria [40];
- –
4.3. Simulation Results
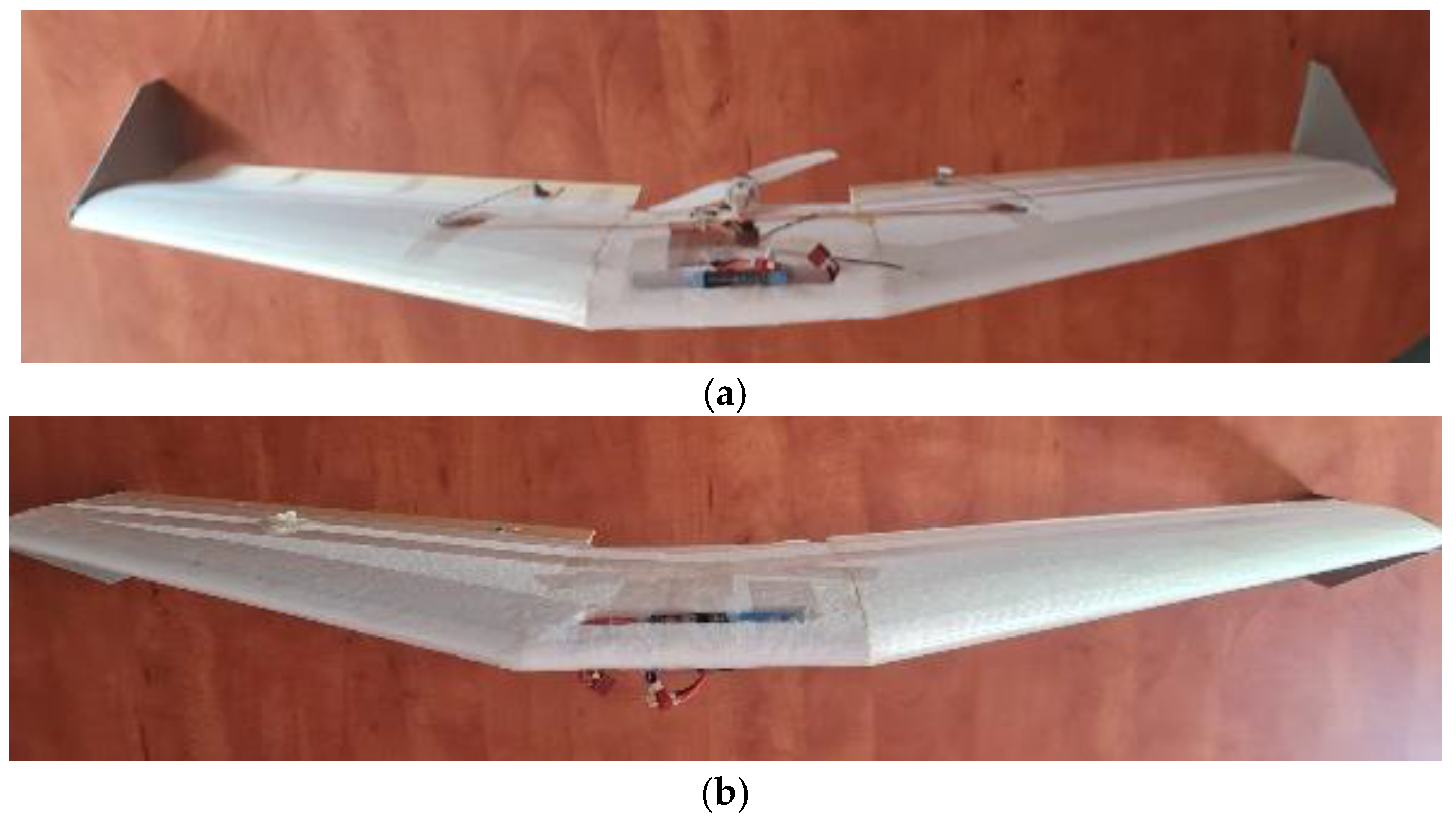
5. Drone Fabrication
6. Results of Fly Tests
6.1. Flight Tests
6.2. Flight Test 1
6.3. Flight Test 2
- –
- The two propeller blades were found to be approximately 50 m apart around the incident area.
- –
- The engine was not found.
- –
- A section of the engine mount was found missing.
- –
- The motor and propeller assembly were found missing.
- –
- No structural integrity issues were found in the areas in the vicinity of the propeller, which indicates a lack of blade-to-body impact.
- –
- The wing structure remained intact except for the detachment of the fiberglass reinforcement strips, which intersected the recessed area of the detached engine–engine mount section.
- –
- The blade tip speed regime verification table prepared as part of the project indicated that the propulsion assembly used—consisting of the A2206 2600 Kv engine, equipped with a GWS 7x3.5 propeller and powered by a 3-cell Li-ion battery—is susceptible to transonic speed at the blade tip.
- –
- During the last evolution, the engine was ran at full throttle, including during the descent section.
- –
- It is known that both the structural aerodynamic efforts and the airspeed reach their maximum values at the exit point of the looping, which corresponds exactly to the time at which the incident was observed.
- –
- The decrease in aerodynamic effort on the propeller blades can reach negative values due to the increased speed dictated by the aircraft’s evolution at this point, which facilitates engine overload, which in turn induces the blade tip to become transonic.
6.4. Conclusions of These Two Flight Tests
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- McCormick, B.W. Aerodynamics of V/STOL Flight; Dover Publications: Garden City, NY, USA; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Mueller, T.J.; DeLaurier, J.D. Aerodynamics of Small Vehicles. Annu. Rev. Fluid Mech. 2003, 35, 89–111. [Google Scholar] [CrossRef]
- Beard, R.W.; McLain, T.W. Small Unmanned Aircraft: Theory and Practice; Princeton University Press: Princeton, NJ, USA, 2012. [Google Scholar]
- Fahlstrom, P.G.; Gleason, T.J. Introduction to UAV Systems; John Wiley & Sons Ltd.: West Sussex, UK, 2012. [Google Scholar]
- Professional Drones Built for Work. Parrot Drones Adapt to the Needs of Professionals. Available online: https://www.parrot.com/en/drones (accessed on 25 June 2024).
- Esmaeel, E.; Tadjfar, M.; Najafi, S. Aerodynamic performance of Parastoo UAV. Aircr. Eng. Aerosp. Technol. 2013, 85, 97–103. [Google Scholar] [CrossRef]
- Shafiee, M.; Zhou, Z.; Mei, L.; Dinmohammadi, F.; Karama, J.; Flynn, D. Unmanned Aerial Drones for Inspection of Offshore Wind Turbines: A Mission-Critical Failure Analysis. Robotics 2021, 10, 26. [Google Scholar] [CrossRef]
- Kumar, M.; Senthil, A.; Krishnan, S.; Vijayanandh, R. Vibrational fatigue analysis of NACA 63215 small horizontal axis wind turbine blade. Mater. Today Proc. 2018, 5, 6665–6674. [Google Scholar] [CrossRef]
- DJI Phantom. Available online: https://www.dji.com/de/phantom (accessed on 25 June 2024).
- Kuşhan, M.C.; Gürgen, S.; Sofuoğlu, M.A. (Eds.) Materials, Structures and Manufacturing for Aircraft (Sustainable Aviation); Springer International Publishing: Cham, Switzerland, 2022. [Google Scholar]
- Keane, A.J.; Sóbester, A.; Scanlan, J.P. Small Unmanned Fixed-Wing Aircraft Design. A Practical Approach; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2017; pp. 45–48. [Google Scholar]
- Maier, R.; Mandoc, A.; Gherasim, S.; Petculescu, S.; Manolache, D.; Carlanescu, R. Design, Aerodynamic Calculation and Manufacturing using CFRP and Additive Manufacturing of a Small Tilt-Rotor UAV for Railway Inspection. INCAS Bull. 2020, 12, 111–125. [Google Scholar] [CrossRef]
- Fear the Cardboard Drones. Available online: https://www.thedroningcompany.com/blog/fear-the-cardboard-drones (accessed on 10 July 2024).
- de Mateo Sanguino, T.J.; Lozano Domínguez, J.M. Design and stabilization of a Coandă effect-based UAV: Comparative study between fuzzy logic and PID control approaches. Robot. Auton. Syst. 2024, 175, 104662. [Google Scholar] [CrossRef]
- UAV’s and Drones. Available online: https://www.engineeredfoamproducts.com/products/uavs-and-drones/ (accessed on 20 June 2024).
- Sharun, S.M.; Iberahim, R.; Kasim, M.S.; Yusof, S.N.A.; Halim Yap, M.F.A.A.; Ab Aziz, A.A. Development of a Cost-Effective UAV for Extended Duration Disaster Management Operations using Expanded Polystyrene. J. Adv. Res. Appl. Sci. 2024, 47, 1–5. [Google Scholar] [CrossRef]
- Sonkar, S.; Kumar, P.; George, R.C.; Yuvaraj, T.P.; Philip, D.; Ghosh, A.K. Low-cost development of a fully composite fixed-wing hybrid VTOL UAV. J Braz. Soc. Mech. Sci. Eng. 2024, 46, 252. [Google Scholar] [CrossRef]
- NACA 63-215 Airfoil (n63215-il) NACA 63-215 Airfoil—NACA 63(2)-215 Airfoil. Available online: https://m-selig.ae.illinois.edu/ads/coord/n63215.dat (accessed on 20 November 2024).
- NASA Glenn Research Center—The Beginner’s Guide to Aeronautics. Available online: https://www.grc.nasa.gov/www/k-12/airplane/ (accessed on 25 June 2024).
- Abbott, I.H.; von Doenhoff, A.E. Theory of Wing Sections: Including a Summary of Airfoil Data; Dover Publications, Inc.: Garden City, NY, USA, 1959; Available online: https://aeroknowledge77.wordpress.com/wp-content/uploads/2011/09/58986488-theory-of-wing-sections-including-a-summary-of-airfoil-data.pdf (accessed on 27 June 2024).
- van Dyke, M.D. High-Speed Subsonic Characteristics of 16 Naca 6-Serie_Airfoil Sections. 1952. Available online: https://digital.library.unt.edu/ark:/67531/metadc56889/m2/1/high_res_d/19930083777.pdf (accessed on 17 June 2024).
- Balașa, R.; Andrei, C.C.; Andrei, A.G.; Semenescu, A. The Impact of Different Outward and Inward Protrusion Positions on the NACA 1410 Airfoil Section at Various Angles of Attack. Mech. Test. Diagn. 2021, 11, 10–17. [Google Scholar] [CrossRef]
- Maughmer, M.D.; Bramesfeld, D.P. Aerodynamic Characteristics of Airfoils at Low Reynolds Numbers. Teh. Vjesn. 2017, 24, 1111–1118. [Google Scholar] [CrossRef]
- Ives, R.; Keir, S.A.; Bassey, E.; Hamad, F.A. Investigation of the flow around an aircraft wing of section NACA 2412 utilising ANSYS fluent. INCAS Bull. 2018, 10, 95–104. [Google Scholar] [CrossRef]
- Kapoulas, I.K.; Statharas, J.C.; Hatziefremidis, A.; Baldoukas, A.K. Fast Airfoil Selection Methodology for Small Unmanned Aerial Vehicles. Appl. Sci. 2022, 12, 9328. [Google Scholar] [CrossRef]
- Selig, M.S.; Guglielmo, J.J. High-Lift Low Reynolds Number Airfoil Design. J. Airc. 1997, 34, 72–79. [Google Scholar] [CrossRef]
- Selig, M.S.; Somers, R.W. Low-Speed Airfoil Data for NACA 6-Series Airfoils. Available online: https://ntrs.nasa.gov/api/citations/19740013521/downloads/19740013521.pdf (accessed on 3 November 2024).
- Sang, L.Q.; Phengpom, T.; Thin, D.V.; Duc, N.H.; Hang, L.T.T.; Huyen, C.T.T.; Huong, N.T.T.; Tran, Q.T. A Method to Design an Efficient Airfoil for Small Wind Turbines in Low Wind Speed Conditions Using XFLR5 and CFD Simulations. Energies 2024, 17, 4113. [Google Scholar] [CrossRef]
- MH-49. Available online: https://www.mh-aerotools.de/airfoils/mh49koo.htm (accessed on 2 November 2024).
- Fadiji, T.; Tarl, B.; Corne, C.; Umezuruike, L.O. Investigating the Mechanical Properties of Paperboard Packaging Material for Handling Fresh Produce under Different Environmental Conditions: Experimental Analysis and Finite Element Modelling. J. Appl. Packag. Res. 2017, 9, 20–34. Available online: https://repository.rit.edu/cgi/viewcontent.cgi?article=1066&context=japr (accessed on 24 September 2024).
- Chen, W.; Hao, H.; Hughes, D.; Shi, Y.; Cui, J.; Li, Z.-X. Static and dynamic mechanical properties of expanded polystyrene. Mater. Des. 2015, 69, 170–180. [Google Scholar] [CrossRef]
- Cronin, D.S.; Ouellet, S. Low density polyethylene, expanded polystyrene and expanded polypropylene: Strain rate and size effects on mechanical properties. Polym. Test. 2016, 53, 40–50. [Google Scholar] [CrossRef]
- Tahir, M.N.; Hamed, E. Effects of temperature and thermal cycles on the mechanical properties of expanded polystyrene foam. J. Sandw. Struct. Mater. 2022, 24, 1535–1555. [Google Scholar] [CrossRef]
- Overview of Materials for Expanded Polystyrene (EPS). Available online: https://www.matweb.com/search/DataSheet.aspx?MatGUID=5f099f2b5eeb41cba804ca0bc64fa62f (accessed on 24 September 2024).
- Brungardt, J. Unmanned Aircraft System Elements. In Introduction to Unmanned Aircraft Systems; Barnhart, R.K., Hottman, S.B., Marshall, D.M., Shappee, E., Eds.; CRC Press Taylor & Francis Group: Boca Raton, FL, USA, 2012; pp. 17–28. [Google Scholar]
- Carvalhal, P.; Santos, C.; Ferreira, M.; Silva, L.; Afonso, J. Design and Development of a Fly-by-Wireless UAV Platform. In Unmanned Aerial Vehicles (UAV) and Drones; Gacovski, Z., Ed.; Arcler Press: Burlington, ON, Canada, 2021; pp. 3–78. [Google Scholar]
- Năstăsescu, V.; Ştefan, A.; Lupoiu, C. Analiza Neliniară Prin Metoda Elementelor Finite, Fundamente Teoretice şi Aplicaţii; Academia Tehnică Militară: Bucharest, Romania, 2001. (In Romanian) [Google Scholar]
- Lee, H.-H. Finite Element Simulations with ANSYS Workbench 2019; SDC Publications: Mission, KS, USA, 2019. [Google Scholar]
- ANSYS. Explicit Dynamics Analysis Guide; ANSYS, Inc.: Canonsburg, PA, USA, 2021. [Google Scholar]
- Report, S.; Corona, E.; Reedlunn, B. A Review of Macroscopic Ductile Failure Criteria. OSTI ID 1096245. USA. 2013. Available online: https://www.osti.gov/servlets/purl/1096245 (accessed on 10 June 2024). [CrossRef]
- BLDC A2212/13T/1000 KV Brushless DC Motor SKU: A-41. Available online: https://www.graylogix.in/product/bldc-a2212-13t-1000-kv-brushless-dc-motor (accessed on 12 February 2024).
- Dumitrescu, H.; Georgescu, A.; Creangă, V.; Popovici, J.; Ghiță, G.; Dumitrache, A.; Nicolescu, B. Calculul Elicei; Editura Academiei Române: Bucharest, Romania, 1990. (In Romanian) [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of the Profile | MH (Martin Hepperle) | NACA |
|---|---|---|
| Designer | Martin Hepperle | NACA (National Advisory Committee for Aeronautics) |
| Aplications | UAVs, gliders, propellers | Aviation. General applications. |
| Performance | Lift-to-drag ratio better than NACA profiles to achieve low Reynolds numbers | Better aerodynamic coefficients for high Reynolds numbers |
| Complexity | Complex profile, obtained by computational optimization | Simpler shapes, easy to fabricate |
| Reynolds range | Optimized profiles to achieve low and medium Reynolds numbers (until 500,000) | Applicable for any Reynolds number |
| Property | Value |
| Density [kg m3] | 600 |
| Young modulus [MPa] | 2650 |
| Poisson ratio | 0.3 |
| Isotropic bilinear hardening model | |
| Yield limit [MPa] | 50 |
| Tangent modulus [MPa] | 450 |
| Failure criterion | |
| Equivalent plastic strain at break | 0.01 |
| 2600 Kv | |||
|---|---|---|---|
| Propellers | A2208 8t | 3 s | |
| 7x3.5 | 838 | gf | Transonic regime |
| 6x5 L | |||
| 6x6 APC | 600 | gf | Critical T regulator and motor |
| 6x3GWS | 830 | gf | Sightly heated |
| 7x6 TF | |||
| 5x5 APC | 430 | gf | N/A |
| 6x4 MA L | Not tested | ||
| 8x4 APC C-2 | Not tested | ||
| 8x4 MA L | Not tested | ||
| 9x6 APC e | Not tested | ||
| GWS 11X4,5 | Not tested |
| Evolution | Mark | Observations | Fly Safety | Corrective Measures |
|---|---|---|---|---|
| Take-off | 10 | No altitude loss | ||
| Command efficiency | 8 | Slightly lagged commands | Not affecting | |
| Stability | No oscillations | |||
| Landing | No shock |
| Evolution | Mark | Observations | Fly Safety | Corrective Measures |
|---|---|---|---|---|
| Looping 1 | 10 | N/A | ||
| Looping 2 | 10 | N/A | ||
| Looping 3 | 6 | Propeller breakage and motor dismantling | Affecting | Flight ending |
| Looping 4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iorga, D.; Georgescu, C.; Constantinescu, S.; Ojoc, G.G.; Vasiliu, A.V.; Constantinescu, M.; Andrei, C.C.; Deleanu, L. Micro UAVs with Fixed Wings: Design, Technological Solutions, and Tests. Aerospace 2024, 11, 977. https://doi.org/10.3390/aerospace11120977
Iorga D, Georgescu C, Constantinescu S, Ojoc GG, Vasiliu AV, Constantinescu M, Andrei CC, Deleanu L. Micro UAVs with Fixed Wings: Design, Technological Solutions, and Tests. Aerospace. 2024; 11(12):977. https://doi.org/10.3390/aerospace11120977
Chicago/Turabian StyleIorga, Daniel, Constantin Georgescu, Sorin Constantinescu, George Ghiocel Ojoc, Alexandru Viorel Vasiliu, Mihai Constantinescu, Constantin Cristian Andrei, and Lorena Deleanu. 2024. "Micro UAVs with Fixed Wings: Design, Technological Solutions, and Tests" Aerospace 11, no. 12: 977. https://doi.org/10.3390/aerospace11120977
APA StyleIorga, D., Georgescu, C., Constantinescu, S., Ojoc, G. G., Vasiliu, A. V., Constantinescu, M., Andrei, C. C., & Deleanu, L. (2024). Micro UAVs with Fixed Wings: Design, Technological Solutions, and Tests. Aerospace, 11(12), 977. https://doi.org/10.3390/aerospace11120977