In this section, the design of the relative trajectory and attitude Guidance and Control (GC) strategies for impingement operations is presented, considering the coupling between the efficiency of impingement operations, trajectory safety and robustness.
4.1. Chaser Translational Guidance
In past studies performed by [
19,
21,
23] a V-bar hovering strategy is employed to maintain the chaser in a stable relative position with respect to the target and perform perform impingement firings. Despite its simplicity, the latter approach lacks of key safety requirements due to the highly perturbed relative trajectory controlled during impingement operations. Particularly, passive abort safety during the V-bar approach is not granted given the absence one-orbit RN separation.
Let us consider the relative dynamics of the chaser and uncooperative target on a near-circular orbit expressed through the Relative Orbital Elements (ROE) parametrisation [
35,
36]:
where
and
are, respectively, the plant and input control matrix of relative motion considering Keplerian motion. The acceleration vector
represents the total actions affecting on the relative motion in the RTN frame, while the
u is the scalar mean argument of latitude of the target. The peculiarity of impingement operations lies in the variety of the contributions to the total acceleration vector acting on the formation.
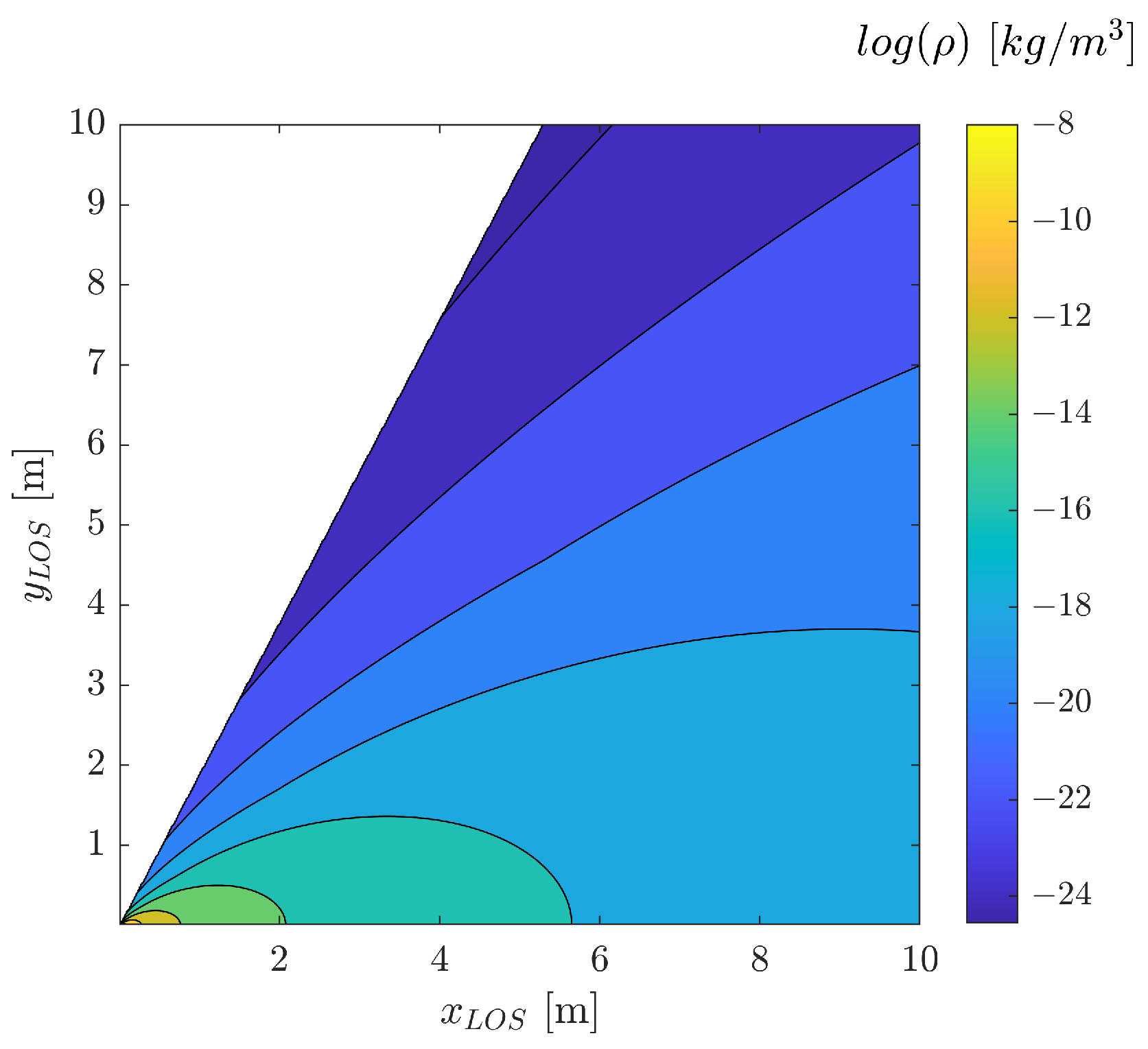
The contribution represents the disturbance acceleration acting on the chaser resulting from the impingement firings towards the target. The quantity denotes instead the disturbance accelerations due to the plume effect on the target surfaces. Both contributions will affect the relative motion of the two objects, despite one acting directly on the chaser or on the target. The accelerations denoted as represent the control actions applied to the chaser platform to maintain the desired relative motion around the target. The contribution is typically known from the chaser firing time and impingement thrust line of sight (LOS) direction, except for firing control errors. On the other hand, the contribution on the target, , is affected by significant uncertainties. The models used for plume gas properties and surface interactions in space are simplified to an analytic model for the ease of impingement control algorithm development and implementation, but they entail large uncertainties compared to real effects in space. Consequently, the control response to achieve formation keeping, , is also influenced by these uncertainties, particularly in the trajectory evolution during failure scenarios.
Considerations on the effects of the plume actions uncertainties are therefore deemed crucial in the trajectory and operations design. Safe relative trajectory operations are often managed by carefully planning the trajectory to stay outside a Keep-Out-Zone (KOZ) and planning collision avoidance policies that force the chaser to move away from the target in case of any contingency. Another option is, the use of the passive abort safety, which is highly desired thanks to its capability to guarantee collision avoidance for a certain amount of time even in the cases of complete loss of control of the chaser platform [
35,
37]. Passive Relative Orbits (PRO) characterised by E/I vector separation can grant passive abort safety imposing a relative orbit geometry with minimum separation in the RN plane of the relative eccentricity and inclination vectors. Specifically, anti-parallel and parallel configurations of relative eccentricity and inclination vector result in an analytic solution for a non-vanishing minimum one-orbit separation between chaser and target in the RN plane.
A study on the improved safety of such trajectories with respect to failures is hereafter presented. Let us consider a failure scenario, where the safety is evaluated considering an initial error due to the uncertainties arising from the unmodelled impingement effects. The covariance change due to impingement related uncertainties is modelled considering an error source that behaves like an impulsive perturbation to the system, both in terms of magnitude and direction errors, according to the Gates model [
38]:
where
and
are the instant before and after the impulsive impingement burn. The
and
are, respectively, the magnitude and pointing variance of the impingement action on the target, while the
is the vector of impulsive impingement effect direction. The covariance evolution in a failure scenario, which models the propagation of the impingement model errors, is presented for two main test cases, namely: the V-bar hovering and a PSO orbit with E/I separation. The parameters of the errors propagation in the aforementioned test cases are reported in
Table 2. In the values of thrust magnitude and direction errors, both are contributions of the perturbing acceleration during impingement on the target (due to the surface pressure) and on the servicer (due to control errors). Conservative values were chosen for the preliminary analysis in this section to encompass the various uncertain phenomenon involved in the impingement operations acting on the relative motion as impulsive effects.
Figure 6 and
Figure 7 show the evolution of the covariance ellipse in RTN in the V-bar hovering case and in the PSO case, respectively. The KOZ in both cases is considered spherical with a radius of 8 m and centred on the target centre of mass. The magnitude and pointing uncertainties on the initial impulsive perturbation due to impingement are modelled as Gaussian distributions with 1
, respectively, of 20% of the delta-v perturbation and 20 degrees of pointing direction error. A magnitude of delta-v perturbation of 1 mm/s was used in this analysis. The dynamics considered in the covariance propagation with the state transition matrix were limited to the Keplerian acceleration effects on the relative motion. The latter assumption was introduced in this preliminary analysis due to the limited propagation time evaluated, as well as the relatively high contribution of control-related action with respect to environmental disturbances. The future covariance ellipses represent the dispersion of the chaser position after a specific time in the presence of impingement effects uncertainties and uncontrolled flight. It is clear from
Figure 6 how uncertainties in the impingement firing towards the target in the V-bar hovering case results in a quick violation of a target KOZ due to the majority of the impingement effects in the along-track direction. On the other hand, in the PSO case, a minimum separation in the RN plane is guaranteed thanks to the majority of effects of the covariance evolution under Keplerian dynamics in the along-track direction.
Both trajectory guidance options studied are almost bounded, hence stable, orbits in the assumption of relative Keplerian dynamics, hence not introducing additional unnecessary station keeping actions during operations. Nonetheless, based on the greater passive safety guaranteed the PSO option will be considered. A further assessment for the definition of the guidance orbits and trajectory guidance is the coupling of the impingement control algorithm with the relative position of the chaser and target.
According to the algorithm explained in
Section 3, the chaser pointing and firing logic depends on two main factors: (1) the relative geometry and orientation of the chaser position vector concerning the target rotational angular momentum vector, and (2) the relative distance between the firing thruster and target’s surfaces. Assuming the target and chaser flying on a near-circular orbit, the inertially fixed rotational angular momentum vector of the target can be modelled in RTN with a precession motion of constant precession rate, which is equal to
n orbital mean motion. An example of the characteristic precession motion of the
vector in the RTN frame for a specific initial orientation is displayed in
Figure 8. Considering the V-bar hovering case, the relative angle between the chaser position vector and
vector depends mainly on the initial angle of the latter with respect to the normal direction and in time. Instead, in the PSO case the relative angle between the position vector and
depends both on the chaser motion along the PSO orbit and on the angular momentum precession motion. Specifically, for any initial constant angle that the angular momentum vector has with the normal direction, namely,
, a synchronised PSO is designed to maximise the orthogonality condition of the position vector and angular momentum vector in the region of closer flight to the target. At the first iteration, the trajectories with null relative semi-major axis
and null relative mean argument of longitude
are selected to ensure simultaneously null drift and same average inter-satellite distance during the path on the relative orbit. The geometry of the trajectory in RTN is then defined by the magnitude of relative eccentricity and inclination vectors and their phase. The magnitude of the vectors fixes the size of the elliptic motion of the chaser around the target. In this regard, is desirable for impingement operations the exploitation of smaller and closer relative orbits. The key aspect analysed in this work is the analysis of the phase of the relative eccentricity and inclination vectors. If we consider the E/I separation condition to ensure passive abort safety, only one of the two vector phases shall be defined, since the other will be derived from the (anti-)parallel condition. The choice of the relative phasing of relative eccentricity (or inclination vectors) is performed in this work considering the relative phasing with the precession motion of the rotational angular momentum of the target. Specifically for a particular motion of the target rotational angular momentum with phase
, the desired phase of the relative eccentricity vector
is defined as:
where
is defined as the angle of the projection of the rotational angular momentum of the target on the RT plane with respect to the R axis at initial time. The “g” subscript stands for the guidance relative eccentricity vector phase. In this way, the relative eccentricity vector, defined as follows:
which guarantees two regions along the PSO where the rotational angular momentum and the relative position vector between the chaser and target are orthogonal. In the specific choice of relative phasing through the angle,
, the regions where the rotational angular momentum vector and the chaser–target position vector are close to the orthogonality conditions is when the latter is mostly along the positive and negative radial direction R. This feature is beneficial to the operations since impingement disturbances acceleration due to impingement will be distributed mostly along the radial direction, which is half more effective in changing the relative trajectory with respect to the transversal effects. Moreover, this will benefit also the flight safety by inducing actions that create instantaneous separation in the along-track direction.
By designing such synchronised PSO to detumble the target, the efficiency of the firing in the thrusting regions is enhanced. It is therefore sufficient to estimate the rotational angular momentum vector initial motion with the initial pose determination algorithm to retrieve the operational relative PSO to be used as guidance for impingement operations. However, once the impingement operations begin, the plume effects will induce a change of the rotational angular momentum vector of the target in both magnitude and phase
. This is due to how the impingement guidance is constructed to generate a torque in the P plane, and to both plume modelling and control errors, the latter related to the thresholds employed to rule the ON/OFF behaviour of the thruster (see
Section 3). As a result, the phase of the rotational angular momentum will slightly change over the impingement firings. To cope with these situations where the orthogonality condition of the guidance orbit is degraded, a dynamic synchronisation strategy is implemented in this work. The concept of the strategy relies on the knowledge of the instantaneous phase of the
vector from the servicer pose estimation and it implements a correction sequence when the said phase difference with the relative eccentricity vector exceeds a threshold value. The correction sequence will act on the phase of the relative eccentricity vector
and bring it to the desired relative phasing of 90 degrees with respect to the current target angular momentum vector. The logic of the PSO synchronised adaptive guidance is depicted in the flow diagram of
Figure 9. According to previous considerations, a guidance ROE state
is defined considering null relative semi-major axis and relative mean longitude, magnitude of relative eccentricity and inclination vectors considering to the size of the relative orbit compliant with the distances required for effective impingement. The phase of relative eccentricity and inclination vectors are taken both equal to
.
The synchronisation sequence that brings the servicer from the condition
to the next guidance ROE
is performed through impulsive burns. Specifically, a modification of the analytic manoeuvre definition method of reference [
39] is employed. From the latter reference, the delta-v optimal in-plane and out-of-plane manoeuvres are placed at the the mean argument of latitude computed from the desired changes of the relative eccentricity and inclination vectors.
The minimum number of optimal manoeuvres for the in-plane to achieve a complete reconfiguration of the full ROE state is three. For the out-of-plane problem, it is one. The delta-v magnitudes are obtained considering the
and
and solving the following linear system:
In our specific case, the phase of the relative eccentricity and inclination vectors at the start/end of the transfer are equal thanks to the E/I separation conditions. Therefore, the optimal location of the in-plane and out-of-plane corrections coincide. Accordingly, it is convenient to split the out-of-plane burn into three manoeuvres, to occur simultaneously to the in-plane ones. Hence, a (anti-)parallel phasing of the relative eccentricity/inclination vectors is kept throughout the whole reconfiguration. A similar strategy is discussed in the design of transfers between inspection spiral trajectories in Borelli et al. [
15]. The reconfiguration strategy adopted is thus performed with impulsive burns planned over a time span of two periods in this work. It is noteworthy that to retain the condition of optimality of in-plane re-configuration with three impulsive manoeuvres, the control time interval needs to be at least 1.5 periods [
39]. The obtained manoeuvres are delta-v optimal, in the sense that they provide the minimum impulsive burn to reach a in-plane and out-of-plane reconfiguration provided that the total transfer time can be greater than 1.5 period, which is imposed in this work.
4.2. Chaser Translational Control
A feedback controller shall be defined to track the guidance trajectory in the PSO defined by
to counteract external disturbances and unmodelled effects. Specifically for the impingement operation where the plume effects and frequent firing introduce a substantial perturbation, the controller shall be able to guarantee the required tracking of the guidance of the formation. Starting from the impingement control algorithm which defines the thruster firing, the control action on the chaser platform to counteract the disturbances on the formation is described by Equation (
12). The perturbation resulting from the thruster firing on the chaser is cancelled out with an equal and opposite action with another thruster. Then the tracking of the guidance PSO will be achieved by cancelling the perturbation on the target and the model errors in thruster applications and pointing.
The controller defined to control this system is an Active Disturbance Rejection Controller (ADRC), which is designed to generate a stabilising system by using an Extended State Observer (ESO) to estimate the total disturbance. The concepts of ADRC are hereafter briefly described. Let us consider the relative motion dynamics expressed as second order system in function of Cartesian coordinates in the RTN frame:
where
and
are position and velocity vectors, respectively,
and
are the lower matrices of the CW dynamics, and
indicates the errors and uncertainties in the system. Let us now consider the dynamics as an unknown function, forced also by the uncertainties and error term:
The key idea that lies behind the synthesis of a ADRC controller is to deal with the poor knowledge of the dynamics function
through a variable augmentation of the system as follows:
where the term
—referred to as total disturbance—is the contribution to be overcome with the controller, without the need to be expressively known. From Equation (
20), an Extended State Observer (ESO) is constructed for the system as follows:
where the
parameters are diagonal matrices which have in general different scalar values for the elements of the diagonal. For simplicity in this work the vector function
is simply taken as linear function of
, resulting in a substitution of
in the dynamics of the ESO for both
and
. For the nonlinear definitions of the functions the reader is referred to reference [
40]. Selecting the nonlinear functions as
and
will synthesise different controllers, which will exhibit particular behaviours. For example properties like overshoot or set-back time will change in relation to the nonlinear function selected and systems on which are applied. The proposed ESO will be used to estimate the augmented plant states
with the variables
.
The controller to track the reference
, obtained with
defined by the guidance scheme of
Section 4.1, can then be defined considering a stabilising feedback as follows:
where
and
are constant diagonal gain matrices. It is noteworthy that this definition relies on linear control functions, but the ADRC methods can exploit different nonlinear functions in the definition of
, providing controller with different behaviours. The proposed control law of Equation (
22), coupled with the ESO, is in the form
, which reduces Equation (
19) to a cascade integral form [
40]. Therefore, the control
can be trivially defined as a function of the error and derivative of the error of the state with respect to the reference in order to stabilise the system. This formulation of ADRC is used in this work to track the PSO guidance during impingement operations. The parameters used in the controller synthesised for this purpose are reported in
Table 3.
_Zhu.png)





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















