
Optimal Impulsive Orbit Transfers from Gateway to Low Lunar Orbit

Abstract
:1. Introduction
- develop a high-fidelity dynamical framework in cislunar space, to investigate orbit transfers, using modified equinoctial elements for orbit dynamics propagations;
- determine optimal two-impulse orbit transfers from Gateway to a set of LLOs with different inclinations, using a new heuristic optimization approach;
- determine optimal two-impulse orbit transfers from Gateway to polar LLOs with specified RAAN, using two distinct numerical techniques, i.e., (i) Lambert-based guess generation, and (ii) heuristic guess generation, with subsequent refinement (for both (i) and (ii));
- identify the existing options for optimal orbit transfers, while comparing the related propellant consumption in relation to the final orbit.
2. Orbit Dynamics
2.1. Reference Frames
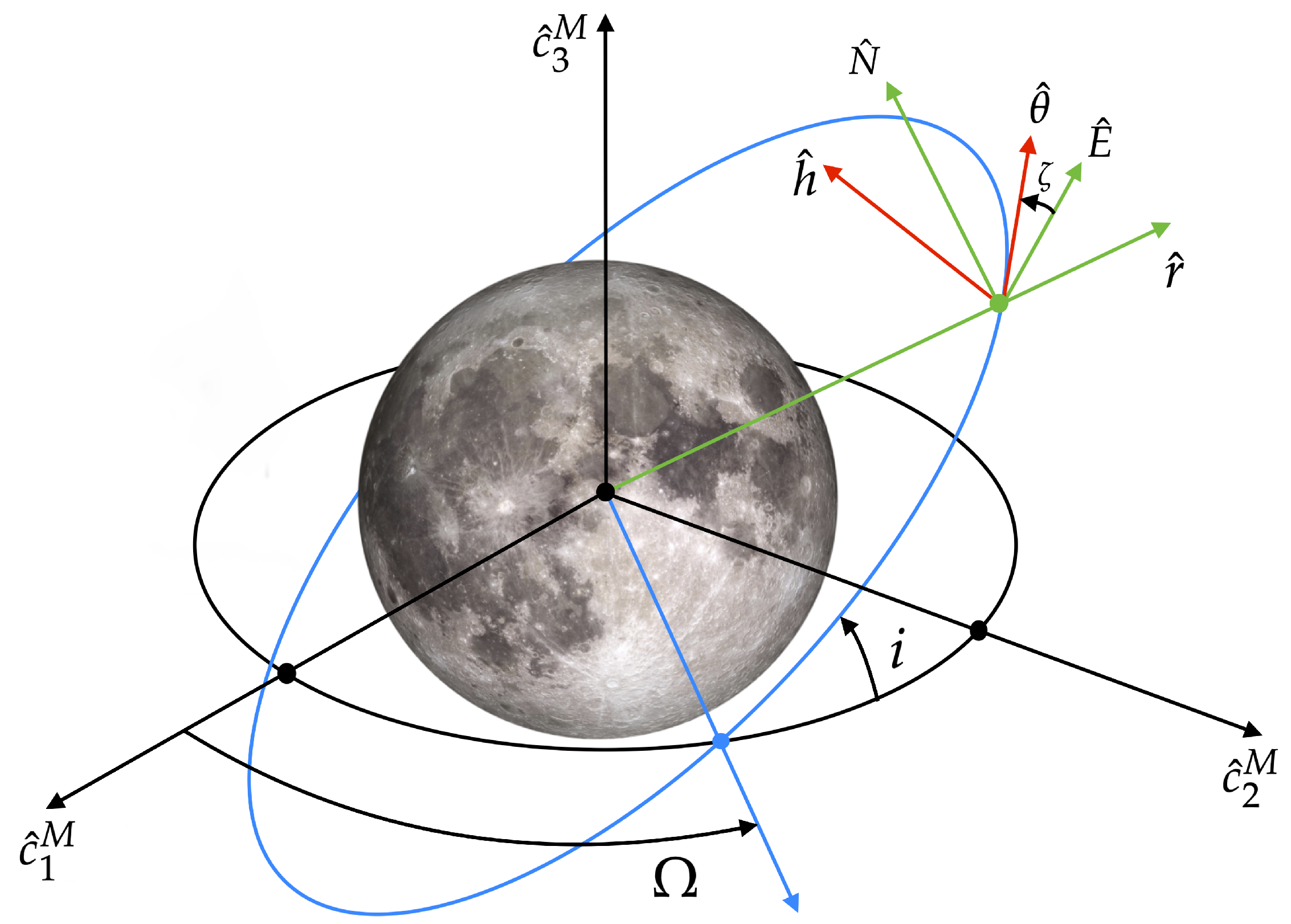
- The Moon-centered inertial frame (MCI) is identified by unit vectors ; and are defined as in [23], with the reference epoch set to 17 May 2025; points toward the lunar rotation axis.
- The local-vertical local-horizontal (LVLH) frame is attached to the center of mass of the spacecraft. The unit vector is directed from the Moon center to the instantaneous position of the vehicle; is aligned with the spacecraft’s orbit angular momentum, while completes the right-handed set. If denotes the RAAN, i the inclination of the orbital plane, the argument of periselenium, and the true anomaly, then the following rotations link MCI to the LVLH-frame:
- The local-horizontal (LH) frame is attached to the center of mass of the spacecraft. The unit vectors and are aligned with the local (lunar) east and north directions, respectively. The LH and LVLH frames can be linked through the following relation:where is the heading angle.
2.2. Equations of Motion
2.3. Orbit Perturbations
2.3.1. Third-Body Perturbations
2.3.2. Harmonics of the Selenopotential
3. Orbital Motion of Gateway
3.1. Gateway Orbit Dynamics from Ephemeris
3.2. Gateway Orbit Dynamics from High-Fidelity Model
4. Minimum-Fuel Orbit Transfers (Free RAAN)
4.1. Formulation of the Problem
- is applied at the initial time along the orbit of Gateway to inject the spacecraft into a transfer trajectory. Consequently, the spacecraft’s dynamical state after the maneuver is given bywhere () and (), respectively, indicate the position and velocity vectors before and after the instantaneous application of the velocity change at ;
- is applied at the end of the transfer time to insert the spacecraft into the desired LLO.
4.2. Method of Solution
- After applying at , the spacecraft is inserted into the transfer. Its state is propagated forward in time according to the equations of motion of the high-fidelity model (cfr. Section 2.2), with a maximum ToF of 48 h. The integration ends when the target sphere of radius is reached.
- The value of for the target orbit can be computed fromwhere is the spacecraft position vector at the end of the transfer, whose components are expressed in the MCI frame, whileidentifies the direction of the angular momentum associated with the orbit containing the final spacecraft position.
- Equation (21) yields two solutions for the RAAN, denoted by (, ). The corresponding values of the argument of latitude (, ) are then calculated. For each solution (, ), the comparison point along the LLO is determined via a single-parameter search, aimed at minimizing the cost functionwhere is the distance of from the final position (identified with , while and are weighting coefficients with proper units. The single parameter of interest is the argument of latitude, identifying along the desired final LLO.
- The primary optimization is conducted using a cost function defined aswhere represents the difference between the altitude reached at the end of the transfer and the desired altitude , while , , , and are weighting coefficients with proper units. The term guides the trajectory toward the target sphere. When deg, including in the cost function yields convergence when the intersection between the transfer and target spheres occurs at latitudes higher than the inclination of the target orbit.
- The cost function J is evaluated for each pair , , and the values that minimize J are selected.
- (i)
- A first global optimization of J is performed by means of the Stochastic Fractal Search (SFS) algorithm. Its stochastic approach enhances the exploration phase and reduces the possibility of becoming stuck in local minima. A detailed description of the SFS algorithm is reported in Appendix A.
- (ii)
- Then, the MATLAB built-in routine fmincon is employed for solution refinement, with an equality constraint on the final altitude, and an inequality constraint on the latitude of , i.e., . The latter inequality constraint ensures that an LLO with inclination passes through .
- The distance unit (DU) is equal to the lunar mean equatorial radius,
- The time unit (TU) is chosen to yield a unit gravitational parameter,with km3/s2.
4.3. Numerical Results
5. Minimum-Fuel Orbit Transfers (Specified RAAN)
5.1. Formulation of the Problem
5.2. Method 1: Lambert-Based Guess Generation and High-Fidelity Refinement
- The initial state , identified by ;
- The final state , identified by ;
- The transfer time, .
5.3. Numerical Results Using Method 1
- Population size, 50;
- Maximum generation number, 250;
- Maximum diffusion number, 10.
5.4. Method 2: High-Fidelity Heuristic Guess and Local Refinement
5.5. Numerical Results Using Method 2
5.6. Comparison of Results
6. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CR3BP | Circular restricted 3-body problem |
| DRO | Distant retrograde orbit |
| LEO | Low earth orbit |
| LH | Local horizontal |
| LLO | Low lunar orbit |
| LVLH | Local vertical local horizontal |
| MCI | Moon-centered inertial |
| NRHO | Near-rectilinear halo orbit |
| RAAN | Right ascension of the ascending node |
| SFS | Stochastic fractal search |
| ToF | Time of flight |
Appendix A. Stochastic Fractal Search Algorithm
- An initial diffusing phase, in which the existing individuals are “diffused” around their current position. To generate the branch-like fractal shape, the diffusion-limited aggregation (DLA) [41] model is employed, by exploiting the Gaussian walk statistical technique. Only the best individual generated from this diffusion is considered, while the others are discarded in order to avoid a dramatic increase in the number of individuals.
- A subsequent updating phase, in which the less well performing candidates are replaced by other individuals, randomly generated. This updating step aims at introducing a way for the individuals to exchange information, to speed up convergence toward the optimal solution.
- For , evaluate the fitness function associated with individual i, .
- The best individual, which corresponds to the current minimum value of the fitness function, is identified and is associated with index .
- Diffusion phase. For :
- (a)
- The “diffusion limited aggregation” growth process employs the Gaussian distribution to generate new individuals; is the number of individuals generated by diffusion of individual i. For ,where , denotes a threshold value, whereas , and are three random variables with uniform distribution in . Symbol denotes a vector with random components , subject to Gaussian distribution, with mean value (component of ) and standard deviationThe term aims at decreasing the size of the Gaussian jumps, to promote more localized search as the generation index g increases.
- (b)
- The bounds (A1) are enforced for each component () of the generated individuals. For and ,
- (c)
- For , evaluate the fitness function associated with individual .
- (d)
- Select the best individual among , such that .
- (e)
- Select the best individual between and , i.e.,At the end of the diffusion phase, N individuals are replaced by N individuals .
- For , evaluate the fitness function .
- First updating phase. For :
- (a)
- A probability value is assigned to each individual, in order to give a higher probability to survive to more performing individuals:where equals 1 for the best individual and N for the worst one.
- (b)
- For , select two random integers in the interval and setwhere is a random number with a uniform distribution in . In this way, a “mutant” vector is generated.
- (c)
- For ,
- (d)
- Evaluate the fitness function associated with individual .
- (e)
- Select the best individual between and , i.e.,At the end of the first updating phase, N individuals are replaced by N individuals .
- For , evaluate the fitness function .
- Second updating phase. For :
- (a)
- A probability value is assigned again to each individual, using the preceding definition of .
- (b)
- For , select two random integers in the interval and setwhere and are two random numbers with uniform distribution in . In this way a new “mutant” vector is generated.
- (c)
- For ,
- (d)
- Evaluate the fitness function associated with individual .
- (e)
- Select the best individual between and , i.e.,At the end of the second updating phase, the new population is generated.
References
- NASA. Artemis Plan. 2020. Available online: https://www.nasa.gov/wp-content/uploads/2020/12/artemis_plan-20200921.pdf (accessed on 3 July 2023).
- NASA. What Is CAPSTONE? Available online: https://www.nasa.gov/smallspacecraft/capstone/ (accessed on 12 July 2023).
- Howell, K.C.; Kakoi, M. Transfers between the Earth–Moon and Sun–Earth systems using manifolds and transit orbits. Acta Astronaut. 2006, 59, 367–380. [Google Scholar] [CrossRef]
- Alessi, E.M.; Gomez, G.; Masdemont, J.J. Two-manoeuvres transfers between LEOs and Lissajous orbits in the Earth–Moon system. Adv. Space Res. 2010, 45, 1276–1291. [Google Scholar] [CrossRef]
- Pontani, M.; Teofilatto, P. Polyhedral representation of invariant manifolds applied to orbit transfers in the Earth–Moon system. Acta Astronaut. 2016, 119, 218–232. [Google Scholar] [CrossRef]
- Patrick, B.; Pascarella, A.; Woollands, R. Hybrid Optimization of High-Fidelity Low-Thrust Transfers to the Lunar Gateway. J. Astronaut. Sci. 2023, 70, 27. [Google Scholar] [CrossRef]
- Singh, S.K.; Anderson, B.D.; Taheri, E.; Junkins, J.L. Low-thrust transfers to southern L2 near-rectilinear halo orbits facilitated by invariant manifolds. J. Optim. Theory Appl. 2021, 191, 517–544. [Google Scholar] [CrossRef]
- He, G.; Conte, D.; Melton, R.G.; Spencer, D.B. Fireworks Algorithm Applied to Trajectory Design for Earth to Lunar Halo Orbits. J. Spacecr. Rocket. 2020, 57, 235–246. [Google Scholar] [CrossRef]
- Muralidharan, V.; Howell, K.C. Stretching directions in cislunar space: Applications for departures and transfer design. Astrodynamics 2023, 7, 153–178. [Google Scholar] [CrossRef]
- Parrish, N.L.; Parker, J.S.; Hughes, S.P.; Heiligers, J. Low-thrust transfers from distant retrograde orbits to L2 halo orbits in the Earth-Moon system. In Proceedings of the International Conference on Astrodynamics Tools and Techniques, Darmstadt, Germany, 14–17 March 2016. [Google Scholar]
- Pino, B.P.; Howell, K.C.; Folta, D. An energy-informed adaptive algorithm for low-thrust spacecraft cislunar trajectory design. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, South Lake Tahoe, CA, USA, 9–13 August 2020. [Google Scholar]
- Pritchett, R.E. Strategies for Low-Thrust Transfer Design Based on Direct Collocation Techniques. Ph.D. Thesis, Purdue University, West Lafayette, IN, USA, 2020. [Google Scholar]
- Das-Stuart, A.; Howell, K.C.; Folta, D.C. Rapid trajectory design in complex environments enabled by reinforcement learning and graph search strategies. Acta Astronaut. 2020, 171, 172–195. [Google Scholar] [CrossRef]
- McCarty, S.L.; Burke, L.M.; McGuire, M. Parallel monotonic basin hopping for low thrust trajectory optimization. In Proceedings of the 2018 Space Flight Mechanics Meeting, Kissimmee, FL, USA, 8–12 January 2018; p. 1452. [Google Scholar]
- Vutukuri, S. Spacecraft Trajectory Design Techniques Using Resonant Orbits. Master’s Thesis, Purdue University, West Lafayette, IN, USA, 2018. [Google Scholar]
- Zimovan-Spreen, E.M.; Howell, K.C. Dynamical structures nearby NRHOS with applications in cislunar space. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Portland, ME, USA, 11–15 August 2019; p. 18. [Google Scholar]
- Whitley, R.; Martinez, R. Options for staging orbits in cislunar space. In Proceedings of the 2016 IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016; pp. 1–9. [Google Scholar]
- Trofimov, S.; Shirobokov, M.; Tselousova, A.; Ovchinnikov, M. Transfers from near-rectilinear halo orbits to low-perilune orbits and the Moon’s surface. Acta Astronaut. 2020, 167, 260–271. [Google Scholar] [CrossRef]
- Rozek, M.; Ogawa, H.; Ueda, S.; Ikenaga, T. Multi-objective optimisation of NRHO-LLO orbit transfer via surrogate-assisted evolutionary algorithms. In Proceedings of the 27th International Symposium on Space Flight Dynamics, Melbourne, Australia, 24–28 February 2019. [Google Scholar]
- Lu, L.; Li, H.; Zhou, W.; Liu, J. Design and analysis of a direct transfer trajectory from a near rectilinear halo orbit to a low lunar orbit. Adv. Space Res. 2021, 67, 1143–1154. [Google Scholar] [CrossRef]
- Bucchioni, G.; Innocenti, M. Phasing maneuver analysis from a low lunar orbit to a near rectilinear halo orbit. Aerospace 2021, 8, 70. [Google Scholar] [CrossRef]
- Zeng, H.; Li, Z.; Xu, R.; Peng, K.; Wang, P. Further Advances for staging orbits of manned lunar exploration mission. Acta Astronaut. 2023, 204, 281–293. [Google Scholar] [CrossRef]
- Pontani, M.; Di Roberto, R.; Graziani, F. Lunar orbit dynamics and maneuvers for Lunisat missions. Acta Astronaut. 2018, 149, 111–122. [Google Scholar] [CrossRef]
- Battin, R.H. An Introduction to the Mathematics and Methods of Astrodynamics; AIAA: Reston, VA, USA, 1999. [Google Scholar]
- Giorgi, S. Una Formulazione Caratteristica del Metodo Encke in Vista dell’Applicazione Numerica; Università di Roma, Scuola di Ingegneria Aerospaziale: Roma, Italy, 1964. [Google Scholar]
- Konopliv, A.; Asmar, S.; Carranza, E.; Sjogren, W.; Yuan, D. Recent gravity models as a result of the Lunar Prospector mission. Icarus 2001, 150, 1–18. [Google Scholar] [CrossRef]
- Leonardi, E.M.; Pontani, M.; Carletta, S.; Teofilatto, P. Low-Thrust Nonlinear Orbit Control for Very Low Lunar Orbits. Appl. Sci. 2024, 14, 1924. [Google Scholar] [CrossRef]
- Lee, D.E. White Paper: Gateway Destination Orbit Model: A Continuous 15 Year NRHO Reference Trajectory; Technical Report; NASA Johnson Space Center: Houston, TX, USA, 2019.
- Davis, D.; Bhatt, S.; Howell, K.; Jang, J.W.; Whitley, R.; Clark, F.; Guzzetti, D.; Zimovan, E.; Barton, G. Orbit maintenance and navigation of human spacecraft at cislunar near rectilinear halo orbits. In Proceedings of the AAS/AIAA Space Flight Mechanics Meeting, San Antonio, TX, USA, 5–9 February 2017. [Google Scholar]
- Davis, D.C.; Phillips, S.M.; Howell, K.C.; Vutukuri, S.; McCarthy, B.P. Stationkeeping and transfer trajectory design for spacecraft in cislunar space. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Columbia River Gorge, Stevenson, WA, USA, 20–24 August 2017; Springer Nature: London, UK, 2017; Volume 8. [Google Scholar]
- Li, S.; Lucey, P.G.; Milliken, R.E.; Hayne, P.O.; Fisher, E.; Williams, J.P.; Hurley, D.M.; Elphic, R.C. Direct evidence of surface exposed water ice in the lunar polar regions. Proc. Natl. Acad. Sci. USA 2018, 115, 8907–8912. [Google Scholar] [CrossRef]
- McGuire, M. Power & Propulsion Element (PPE) Spacecraft Reference Trajectory Document; Vol. PPE-DOC-0079, Rev B; NASA, John H. Glenn Research Center: Cleveland, OH, USA, 2018; pp. 4–5.
- Lee, D.E.; Whitley, R.J.; Acton, C. Sample Deep Space Gateway Orbit. 2018. Available online: https://naif.jpl.nasa.gov/pub/naif/misc/MORE_PROJECTS/DSG/ (accessed on 7 July 2023).
- Zimovan-Spreen, E.M.; Davis, D.C.; Howell, K.C. Recovery Traejctories for Inadvertent Departures from an NRHO. In Proceedings of the AAS/AIAA Spaceflight Mechanics Meeting, Virtual Event, 1–3 February 2021. paper AAS 21-345. [Google Scholar]
- Kolmogorov, A.N. On the Conservation of Conditionally Periodic Motions under Small Perturbation of the Hamiltonian. Dokl. Akad. Nauk SSSR 1954, 98, 527–530. [Google Scholar]
- Arnol’d, V.I. Proof of a theorem of A. N. Kolmogorov on the invariance of quasi-periodic motions under small perturbations of the Hamiltonian. Uspekhi Mat. Nauk 1963, 18, 9–36. [Google Scholar] [CrossRef]
- Moser, J. On invariant curves of area-preserving mappings of an annulus. Matematika 1962, 6, 51–68. [Google Scholar]
- JPL. Ice Confirmed at the Moon’s Poles. 2018. Available online: https://www.jpl.nasa.gov/news/ice-confirmed-at-the-moons-poles (accessed on 12 July 2023).
- Curtis, H.D. Orbital Mechanics for Engineering Students; Butterworth-Heinemann: Oxford, UK, 2013. [Google Scholar]
- Salimi, H. Stochastic Fractal Search: A powerful metaheuristic algorithm. Knowl. Based Syst. 2015, 75, 1–18. [Google Scholar] [CrossRef]
- Witten, T.A.; Sander, L.M. Diffusion-limited aggregation. Phys. Rev. B 1983, 27, 5686–5697. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i [deg] | [m/s] | (UTC) | ToF [h] |
|---|---|---|---|
| 90 | 666 | 22 May 2025 at 09:44 | 36.13 |
| 80 | 710 | 22 May 2025 at 19:05 | 27.15 |
| 70 | 770 | 23 May 2025 at 03:37 | 18.95 |
| 60 | 848 | 17 May 2025 at 16:35 | 47.96 |
| 50 | 908 | 17 May 2025 at 17:10 | 48.00 |
| 40 | 1001 | 17 May 2025 at 14:46 | 44.78 |
| 30 | 1115 | 17 May 2025 at 13:32 | 41.20 |
| 20 | 1253 | 17 May 2025 at 12:32 | 21.95 |
| 10 | 1395 | 17 May 2025 at 11:57 | 12.41 |
| 0 | 1541 | 17 May 2025 at 11:32 | 8.33 |
| ToF | |||||
|---|---|---|---|---|---|
| [deg] | [m/s] | [m/s] | [m/s] | (UTC) | [h] |
| 0 | 90 | 648 | 738 | 30 May 2025 at 00:21 | 5.05 |
| 45 | 152 | 690 | 842 | 27 May 2025 at 15:52 | 48.00 |
| 90 | 40 | 633 | 673 | 5 June 2025 at 02:59 | 17.86 |
| 135 | 202 | 655 | 857 | 21 May 2025 at 01:06 | 48.00 |
| 180 | 45 | 676 | 721 | 10 June 2025 at 13:01 | 48.00 |
| 225 | 197 | 654 | 851 | 27 May 2025 at 09:51 | 48.00 |
| 270 | 47 | 635 | 682 | 23 May 2025 at 09:04 | 13.15 |
| 315 | 175 | 678 | 853 | 21 May 2025 at 05:14 | 48.00 |
| ToF | ||||||
|---|---|---|---|---|---|---|
| [deg] | [deg] | [m/s] | [m/s] | [m/s] | (UTC) | [h] |
| 0 | 8.8 × | 90 | 648 | 738 | 29 May 2025 at 01:35 | 5.04 |
| 45 | 9.0 × | 120 | 718 | 838 | 27 May 2025 at 15:23 | 47.99 |
| 90 | 1.2 × | 38 | 634 | 672 | 5 June 2025 at 02:30 | 18.24 |
| 135 | 1.4 × | 188 | 658 | 846 | 21 May 2025 at 01:04 | 47.98 |
| 180 | 2.9 × | 29 | 716 | 745 | 10 June 2025 at 12:30 | 47.57 |
| 225 | 8.4 × | 182 | 657 | 840 | 27 May 2025 at 09:45 | 48.00 |
| 270 | 1.7 × | 46 | 636 | 682 | 23 May 2025 at 08:45 | 13.43 |
| 315 | 3.0 × | 152 | 699 | 851 | 21 May 2025 at 04:59 | 47.10 |
| ToF | ||||||
|---|---|---|---|---|---|---|
| [deg] | [deg] | [m/s] | [m/s] | [m/s] | (UTC) | [h] |
| 0 | 5.9 × | 78 | 661 | 739 | 29 May 2025 at 23:17 | 6.05 |
| 45 | 3.2 × | 167 | 667 | 834 | 27 May 2025 at 07:42 | 48.00 |
| 90 | 1.2 × | 34 | 637 | 671 | 4 June 2025 at 22:45 | 21.90 |
| 135 | 5.9 × | 187 | 659 | 846 | 21 May 2025 at 01:16 | 48.00 |
| 180 | 3.1 × | 31 | 712 | 743 | 10 June 2025 at 11:26 | 48.00 |
| 225 | 2.6 × | 184 | 656 | 840 | 27 May 2025 at 09:25 | 48.00 |
| 270 | 7.1 × | 43 | 639 | 682 | 23 May 2025 at 07:17 | 14.85 |
| 315 | 4.6 × | 175 | 666 | 841 | 20 May 2025 at 23:37 | 48.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sanna, D.; Leonardi, E.M.; De Angelis, G.; Pontani, M. Optimal Impulsive Orbit Transfers from Gateway to Low Lunar Orbit. Aerospace 2024, 11, 460. https://doi.org/10.3390/aerospace11060460
Sanna D, Leonardi EM, De Angelis G, Pontani M. Optimal Impulsive Orbit Transfers from Gateway to Low Lunar Orbit. Aerospace. 2024; 11(6):460. https://doi.org/10.3390/aerospace11060460
Chicago/Turabian StyleSanna, Dario, Edoardo Maria Leonardi, Giulio De Angelis, and Mauro Pontani. 2024. "Optimal Impulsive Orbit Transfers from Gateway to Low Lunar Orbit" Aerospace 11, no. 6: 460. https://doi.org/10.3390/aerospace11060460