

Compound Control Design of Near-Space Hypersonic Vehicle Based on a Time-Varying Linear Quadratic Regulator and Sliding Mode Method

Abstract
:1. Introduction
2. Dynamic Model
3. Time-Varying LQR Control Law Design
3.1. The Jacobi Polynomials for Time-Varying System
3.2. The Jacobi Polynomials Operation Matrix
- , ;
- , ;
- , ;
- , ,
- , .
3.3. LQR Time-Varying Control Law
4. Sliding Mode Control Law Design
5. Stability Analysis
5.1. Lyapunov–Krasovskii Functional
5.2. Stability Analysis
6. Simulation
6.1. LQR Time-Varying Control Law
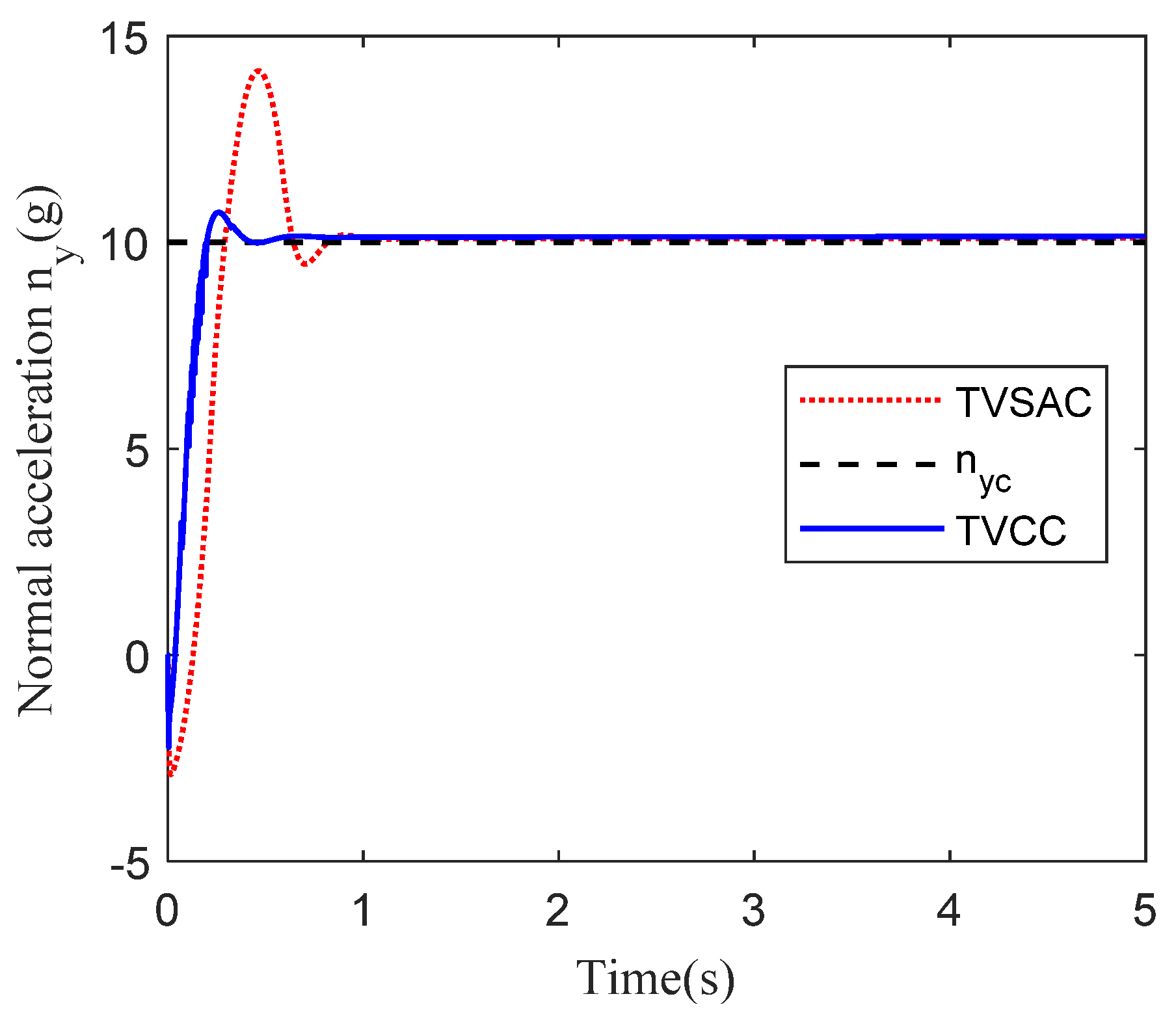
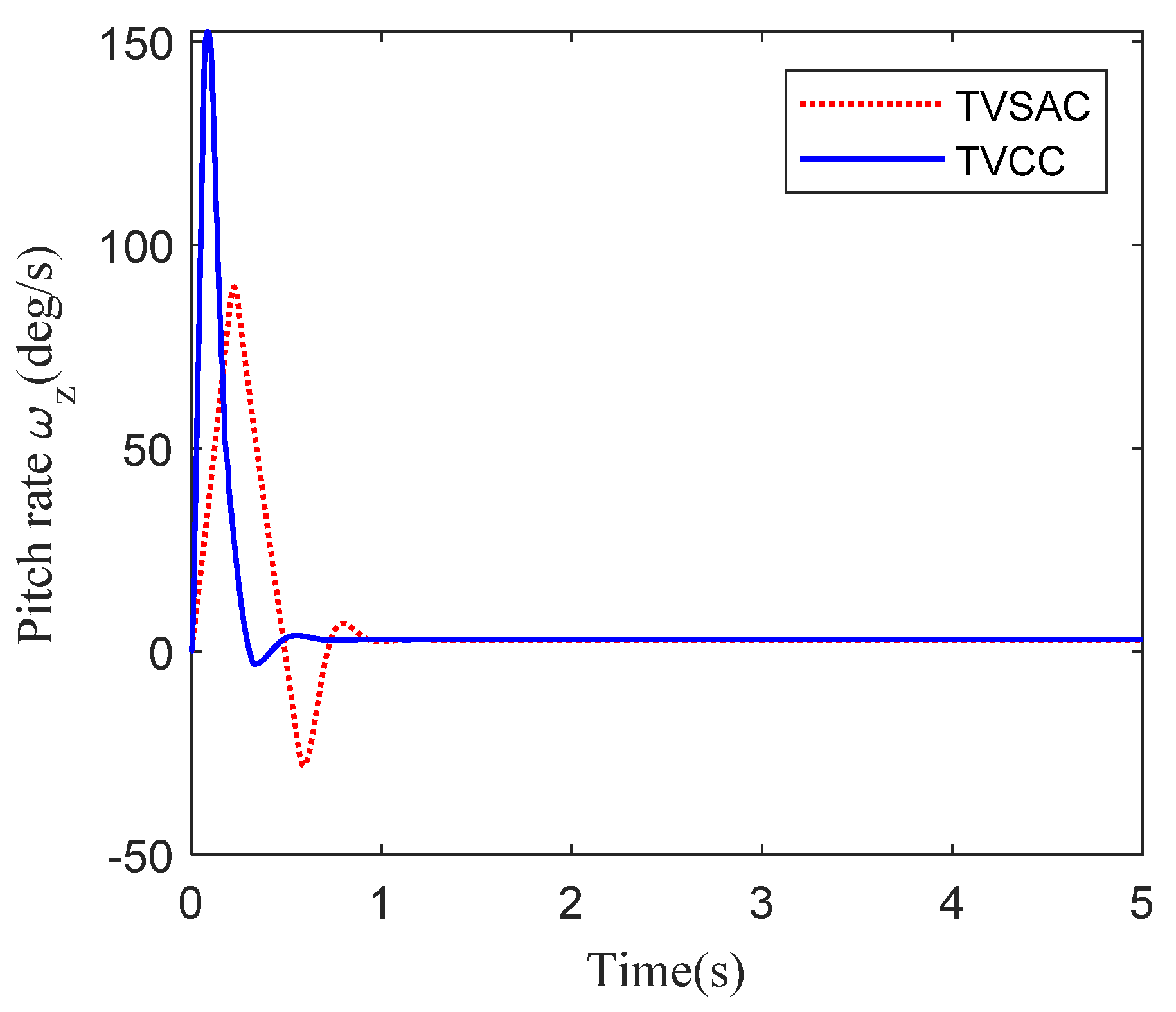
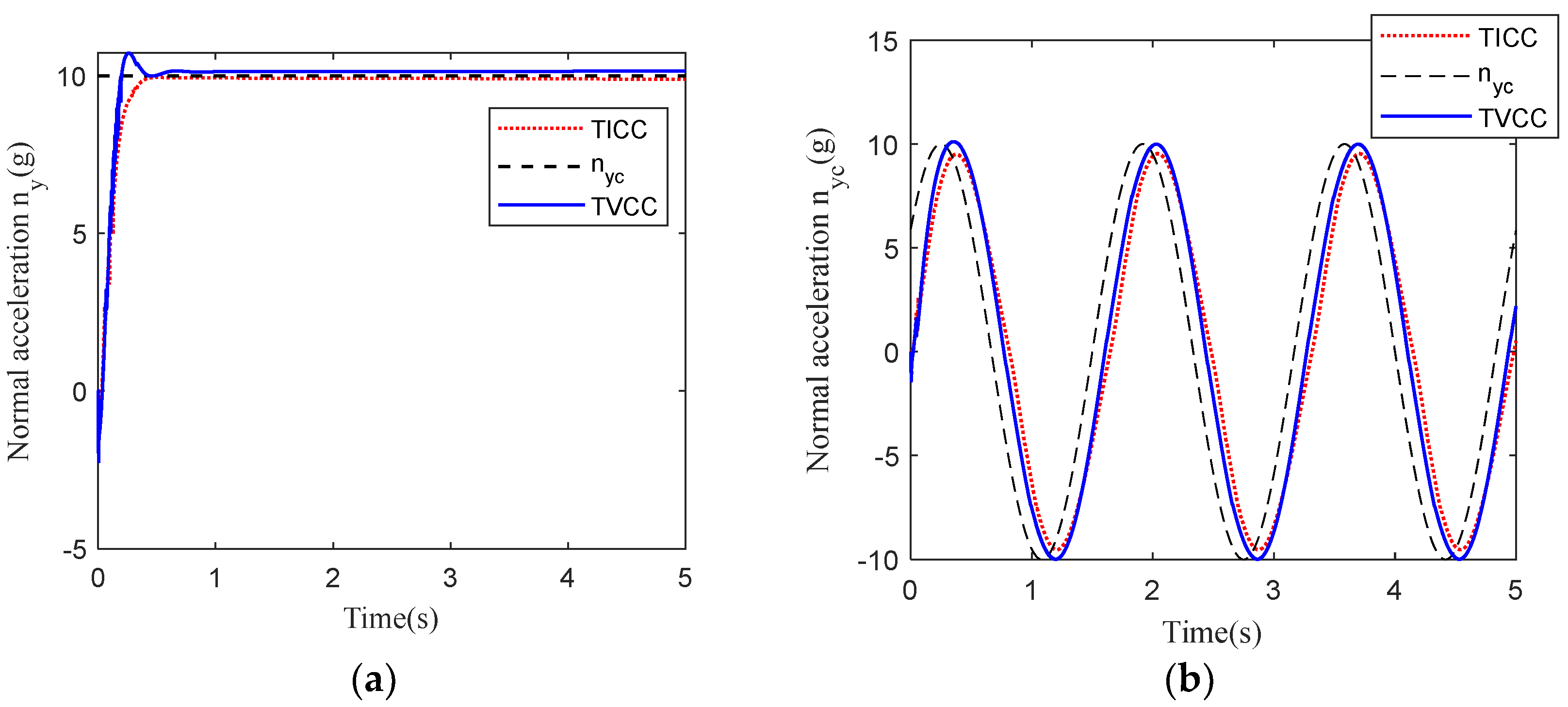
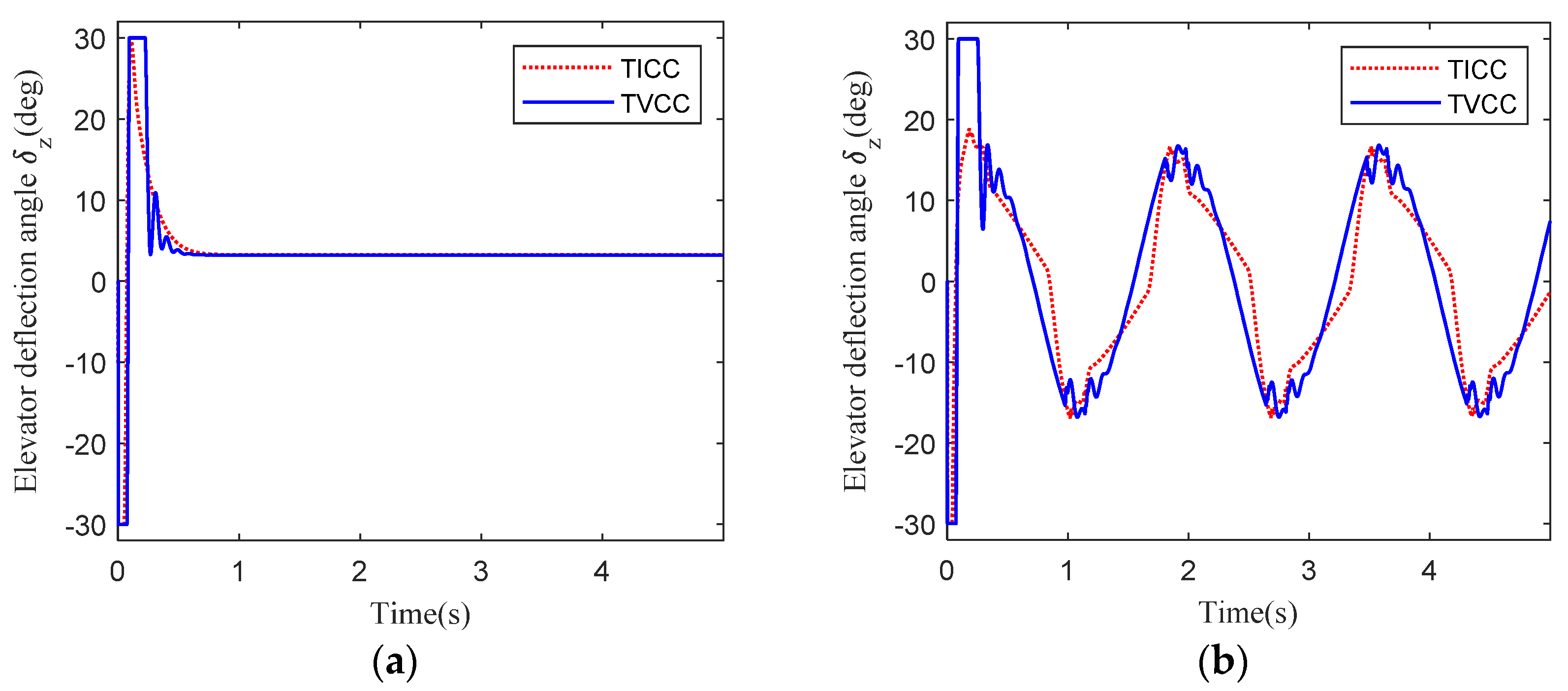
6.2. Simulation Analysis
- (1)
- Case 1
- (2)
- Case 2
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Dynamic coefficients of the vehicle | |
| Elements of the matrix | |
| Normal acceleration command tracking error | |
| Square error integral | |
| Arbitrary time function | |
| Jacobi polynomials coefficient of | |
| , | Engine thrust and engine command, respectively |
| Gravitational acceleration constant | |
| Expansion coefficient of | |
| Coefficient matrix | |
| Product operation matrix of the Jacobi polynomials | |
| dimensional identity matrix | |
| Moment inertia | |
| Minimum quadratic index of LQR | |
| Jacobi polynomials in time-varying system | |
| the Jacobi polynomials vector | |
| the generalized Jacobi polynomials vector | |
| Reciprocal of | |
| Distance from the center of force to the center of mass | |
| Ratio of to | |
| Vehicle mass | |
| Non-negative integers | |
| Arbitrary time-varying matrix | |
| , | Normal acceleration and its command, respectively |
| Integral operation matrix | |
| the nonsingular transformation matrix | |
| Sliding mode surface | |
| Vehicle flight speed | |
| State vectors | |
| Variable of the Jacobi polynomials | |
| Parameters of the Jacobi polynomials | |
| , | Elevator deflection angle and its command, respectively |
| Small constants | |
| , | Time constants |
| Angular velocity | |
| State transition matrix |
References
- Tan, Y.; Jing, W.; Gao, C.; An, R. Adaptive improved super-twisting integral sliding mode guidance law against maneuvering target with terminal angle constraint. Aerosp. Sci. Technol. 2022, 129, 107820. [Google Scholar] [CrossRef]
- Lee, S.; Cho, N.; Kim, Y. Impact-Time-Control Guidance Strategy with a Composite Structure Considering the Seeker’s Field-of-View Constraint. J. Guid. Control. Dyn. 2020, 43, 1566–1574. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, J.; Duan, T.; Wang, J.; Li, X.; Zhang, K. Numerical and Experimental Investigation on Nosebleed Air Jet Control for Hypersonic Vehicle. Aerospace 2023, 10, 552. [Google Scholar] [CrossRef]
- Huang, S.; Jiang, J.; Li, O. Adaptive Neural Network-Based Sliding Mode Backstepping Control for Near-Space Morphing Vehicle. Aerospace 2023, 10, 891. [Google Scholar] [CrossRef]
- Xu, D.; Zhang, J.; Wang, P.; Yan, X.; Dong, H.; Shao, X. Composite Terminal Guidance Law for Supercavitating Torpedoes with Impact Angle Constraints. Math. Probl. Eng. 2022, 1, 65108811. [Google Scholar] [CrossRef]
- Yu, X.; Luo, S.; Liu, H. Integrated Design of Multi-Constrained Snake Maneuver Surge Guidance Control for Hypersonic Vehicles in the Dive Segment. Aerospace 2023, 10, 765. [Google Scholar] [CrossRef]
- Zhang, Y.; Shou, Y.; Zhang, P.; Han, W. Sliding mode based fault-tolerant control of hypersonic reentry vehicle using composite learning. Neurocomputing 2022, 484, 142–148. [Google Scholar] [CrossRef]
- Dong, T.; Zhao, C.; Song, Z. Autopilot Design for a Compound Control Small-Scale Solid Rocket in the Initial Stage of Launch. Int. J. Aerosp. Eng. 2019, 1, 4749109. [Google Scholar] [CrossRef]
- Sun, W. Research on Thrust Vector/Aerodynamics Compound Control Method Based on Linear Quadratic Regulator Control for Solid Rocket. In Proceeding of the Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 545–548. [Google Scholar]
- Liu, Y.; Wang, H.; Wu, T.; Lun, Y.; Fan, J.; Wu, J. Attitude control for hypersonic reentry vehicles: An efficient deep reinforcement learning method. Appl. Soft Comput. 2022, 123, 108865. [Google Scholar] [CrossRef]
- Zhang, B.; Liang, Y.; Rao, S.; Kuang, Y.; Zhu, W. RBFNN-Based Anti-Input Saturation Control for Hypersonic Vehicles. Aerospace 2024, 11, 108. [Google Scholar] [CrossRef]
- Mechali, O.; Xu, L.; Huang, Y.; Shi, M.; Xie, X. Observer-based fixed-time continuous nonsingular terminal sliding mode control of quadrotor aircraft under uncertainties and disturbances for robust trajectory tracking: Theory and experiment. Control. Eng. Pract. 2021, 111, 104806. [Google Scholar] [CrossRef]
- Yun, Y.; Tang, S.; Guo, J.; Shang, W. Robust controller design for compound control missile with fixed bounded convergence time. J. Syst. Eng. Electron. 2018, 29, 116–133. [Google Scholar] [CrossRef]
- Sun, J.; Liu, C. Auxiliary-system-based composite adaptive optimal backstepping control for uncertain nonlinear guidance systems with input constraints. ISA Trans. 2020, 107, 294–306. [Google Scholar] [CrossRef] [PubMed]
- Lv, X.; Zhang, G.; Bai, Z.; Zhou, X.; Shi, Z.; Zhu, M. Adaptive Neural Network Global Fractional Order Fast Terminal Sliding Mode Model-Free Intelligent PID Control for Hypersonic Vehicle’s Ground Thermal Environment. Aerospace 2023, 10, 777. [Google Scholar] [CrossRef]
- Jiang, W.; Wu, K.; Wang, Z.; Wang, Y. Gain-scheduled control for morphing aircraft via switching polytopic linear parameter-varying systems. Aerosp. Sci. Technol. 2020, 107, 106242. [Google Scholar] [CrossRef]
- Yue, T.; Wang, L.; Ai, J. Gain self-scheduled H∞ control for morphing aircraft in the wing transition process based on an LPV model. Chin. J. Aeronaut. 2013, 26, 909–917. [Google Scholar] [CrossRef]
- He, Z.; Yin, M.; Lu, Y.-p. Tensor product model-based control of morphing aircraft in transition process. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2015, 230, 378–391. [Google Scholar] [CrossRef]
- Galván-Guerra, R.; Fridman, L. Robustification of time varying linear quadratic optimal control based on output integral sliding modes. IET Control. Theory Appl. 2015, 9, 563–572. [Google Scholar] [CrossRef]
- Lan, J.; Zhao, D. Finding the LQR Weights to Ensure the Associated Riccati Equations Admit a Common Solution. IEEE Trans. Autom. Control 2023, 68, 6393–6400. [Google Scholar] [CrossRef]
- Abdallah, N.B.; Chouchene, F. New recurrence relations for Wilson polynomials via a system of Jacobi type orthogonal functions. J. Math. Anal. Appl. 2021, 498, 124978. [Google Scholar] [CrossRef]
- Zhang, H.-Y.; Luo, J.-Z.; Zhou, Y. Explicit Symplectic-Precise Iteration Algorithms for Linear Quadratic Regulator and Matrix Differential Riccati Equation. IEEE Access 2021, 9, 105424–105438. [Google Scholar] [CrossRef]
- Bhattacharya, R. Robust LQR design for systems with probabilistic uncertainty. Int. J. Robust Nonlinear Control 2019, 29, 3217–3237. [Google Scholar] [CrossRef]
- Aipanov, S.A.; Murzabekov, Z.N. Analytical solution of a linear quadratic optimal control problem with control value constraints. J. Comput. Syst. Sci. Int. 2014, 53, 84–91. [Google Scholar] [CrossRef]
- Boukadida, W.; Benamor, A.; Messaoud, H. Multi-Objective Design of Optimal Sliding Mode Control for Trajectory Tracking of SCARA Robot Based on Genetic Algorithm. J. Dyn. Syst. Meas. Control 2019, 141, 031015. [Google Scholar] [CrossRef]
- Hu, S.; Wang, J.; Wang, Y.; Tian, S. Stability Limits for the Velocity Orientation Autopilot of Rolling Missiles. IEEE Access 2021, 9, 110940–110951. [Google Scholar] [CrossRef]
- Lee, S.; Cho, N.; Shin, H.-S. Analysis of Guidance Laws With Nonmonotonic Line-of-Sight Rate Convergence. IEEE Trans. Aerosp. Electron. Systems 2022, 58, 1029–1041. [Google Scholar] [CrossRef]
- Guo, J.; Li, Y.; Zhou, J. Qualitative indicator-based guidance scheme for bank-to-turn missiles against couplings and maneuvering targets. Aerosp. Sci. Technol. 2020, 106, 106196. [Google Scholar] [CrossRef]
- Zhou, Z.; Liu, Z.; Pan, Y.; Yi, J. Controller design and stability analysis for spinning missiles via tensor product. Aerosp. Sci. Technol. 2022, 130, 107877. [Google Scholar] [CrossRef]
- Qiao, H.; Meng, H.; Ke, W.; Gao, Q.; Wang, S. Adaptive control of missile attitude based on BP–ADRC. Aircr. Eng. Aerosp. Technol. 2020, 92, 1475–1481. [Google Scholar] [CrossRef]
- Li, W.; Wen, Q.; Yang, Y. Stability analysis of spinning missiles induced by seeker disturbance rejection rate parasitical loop. Aerosp. Sci. Technol. 2019, 90, 194–208. [Google Scholar] [CrossRef]
- Zhou, T.; Cai, G.; Zhou, B. Further results on the construction of strict Lyapunov–Krasovskii functionals for time-varying time-delay systems. J. Frankl. Inst. 2020, 357, 8118–8136. [Google Scholar] [CrossRef]
- Zhou, B. Construction of strict Lyapunov–Krasovskii functionals for time-varying time-delay systems. Automatica 2019, 107, 382–397. [Google Scholar] [CrossRef]
- Lin, S.-D.; Chao, Y.-S.; Srivastava, H.M. Some families of hypergeometric polynomials and associated integral representations. J. Math. Anal. Appl. 2004, 294, 399–411. [Google Scholar] [CrossRef]
- Ma, C.; Malyarenko, A. Time-Varying Isotropic Vector Random Fields on Compact Two-Point Homogeneous Spaces. J. Theor. Probab. 2018, 33, 319–339. [Google Scholar] [CrossRef]
- Aksikas, I.; Forbes, J.F.; Belhamadia, Y. Optimal control design for time-varying catalytic reactors: A Riccati equation-based approach. Int. J. Control. 2009, 82, 1219–1228. [Google Scholar] [CrossRef]
- Athans, M.; Falb, P.L. Optimal Control. In An Introduction to the Theory and Its Applications; McGraw-Hill: New York, NY, USA, 2007. [Google Scholar]
- Kwakernaak, H.; Sivan, R. Linear Optimal Control Systems; John Wiley, Ed.; Wiley-interscience: New York, NY, USA, 1972. [Google Scholar]
- Kalenova, V.I.; Morozov, V.M. A new class of reducible linear time-varying systems and its relation to the optimal control problem. J. Appl. Math. Mech. 2016, 80, 105–112. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| 500 | kg | |
| 1963.4 | m/s | |
| 0.0025 | s | |
| 0.001 | s | |
| 1.36 | m | |
| 9.81 | m/s2 | |
| 300 | Nms2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Zhou, D.; Zhang, Y.; Lou, C. Compound Control Design of Near-Space Hypersonic Vehicle Based on a Time-Varying Linear Quadratic Regulator and Sliding Mode Method. Aerospace 2024, 11, 567. https://doi.org/10.3390/aerospace11070567
Wang H, Zhou D, Zhang Y, Lou C. Compound Control Design of Near-Space Hypersonic Vehicle Based on a Time-Varying Linear Quadratic Regulator and Sliding Mode Method. Aerospace. 2024; 11(7):567. https://doi.org/10.3390/aerospace11070567
Chicago/Turabian StyleWang, Huan, Di Zhou, Yiqun Zhang, and Chaofei Lou. 2024. "Compound Control Design of Near-Space Hypersonic Vehicle Based on a Time-Varying Linear Quadratic Regulator and Sliding Mode Method" Aerospace 11, no. 7: 567. https://doi.org/10.3390/aerospace11070567