
On the Generalization Capability of a Data-Driven Turbulence Model by Field Inversion and Machine Learning
Abstract
:1. Introduction
2. Methodology
2.1. Field Inversion and Machine Learning
2.2. A Closed-Form Correction with Radial Basis Function
2.3. Numerical Set-Up
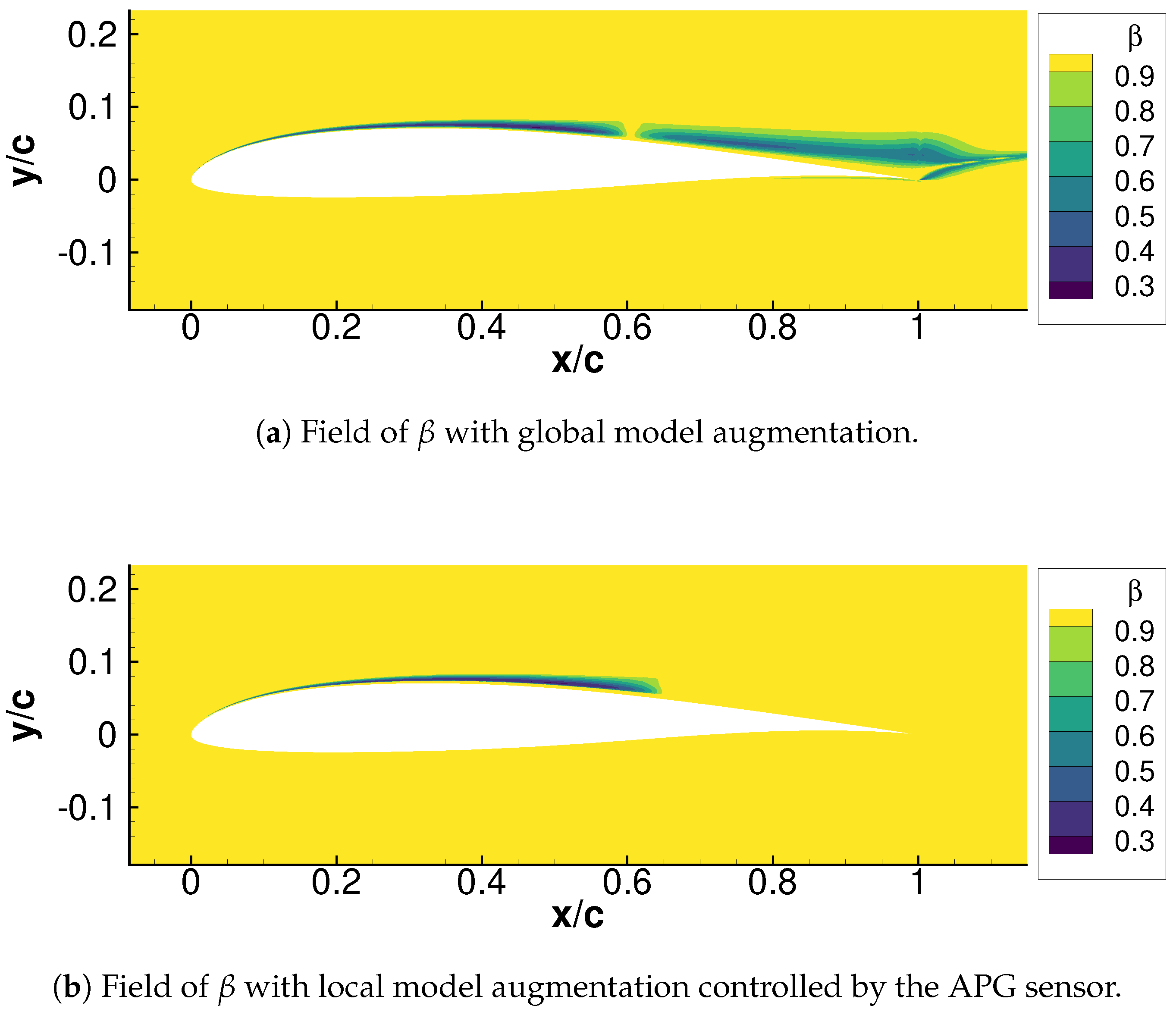
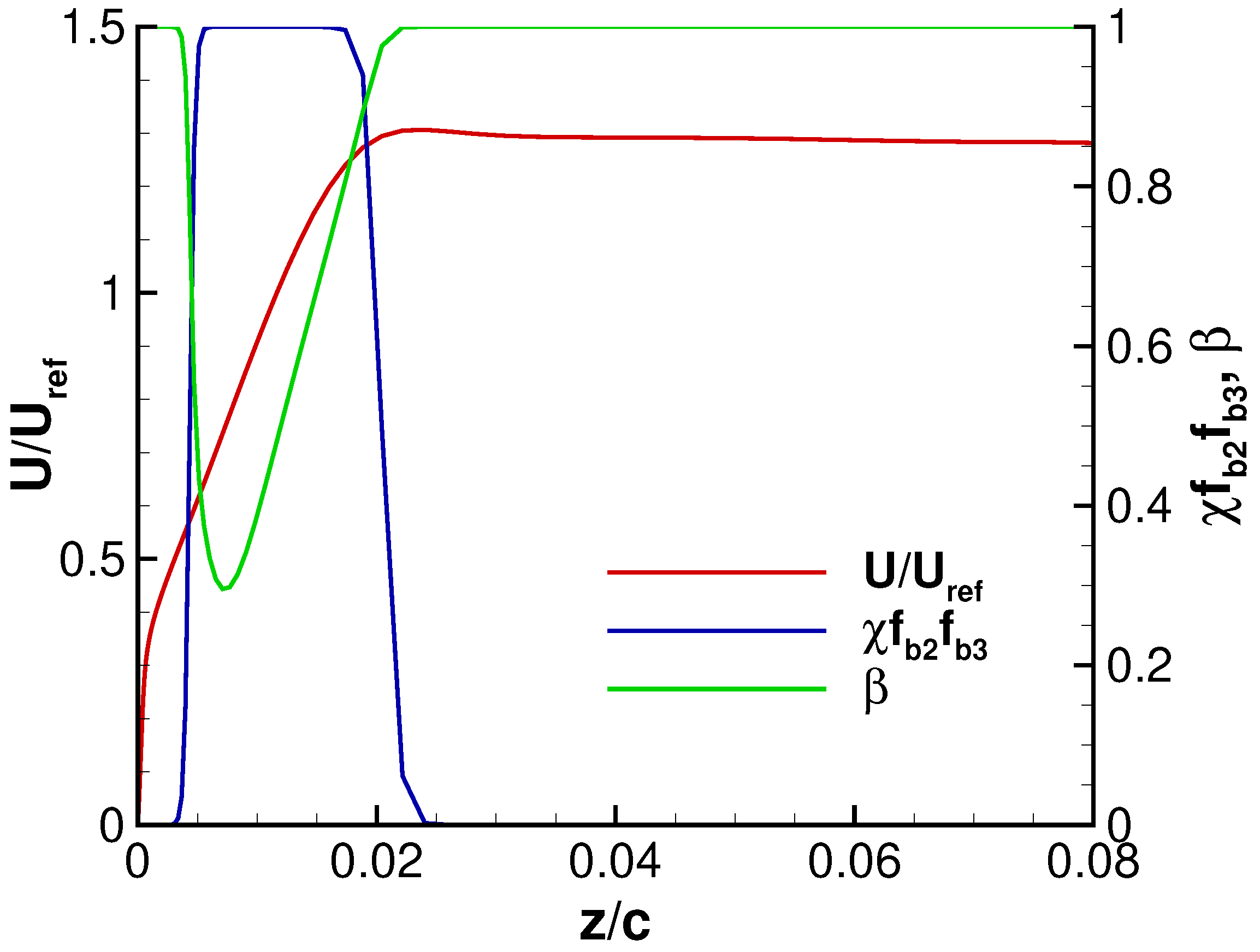
2.4. Localized Model Correction with Sensor Functions for Adverse Pressure Gradient Flows
3. Two-Dimensional Flow Cases
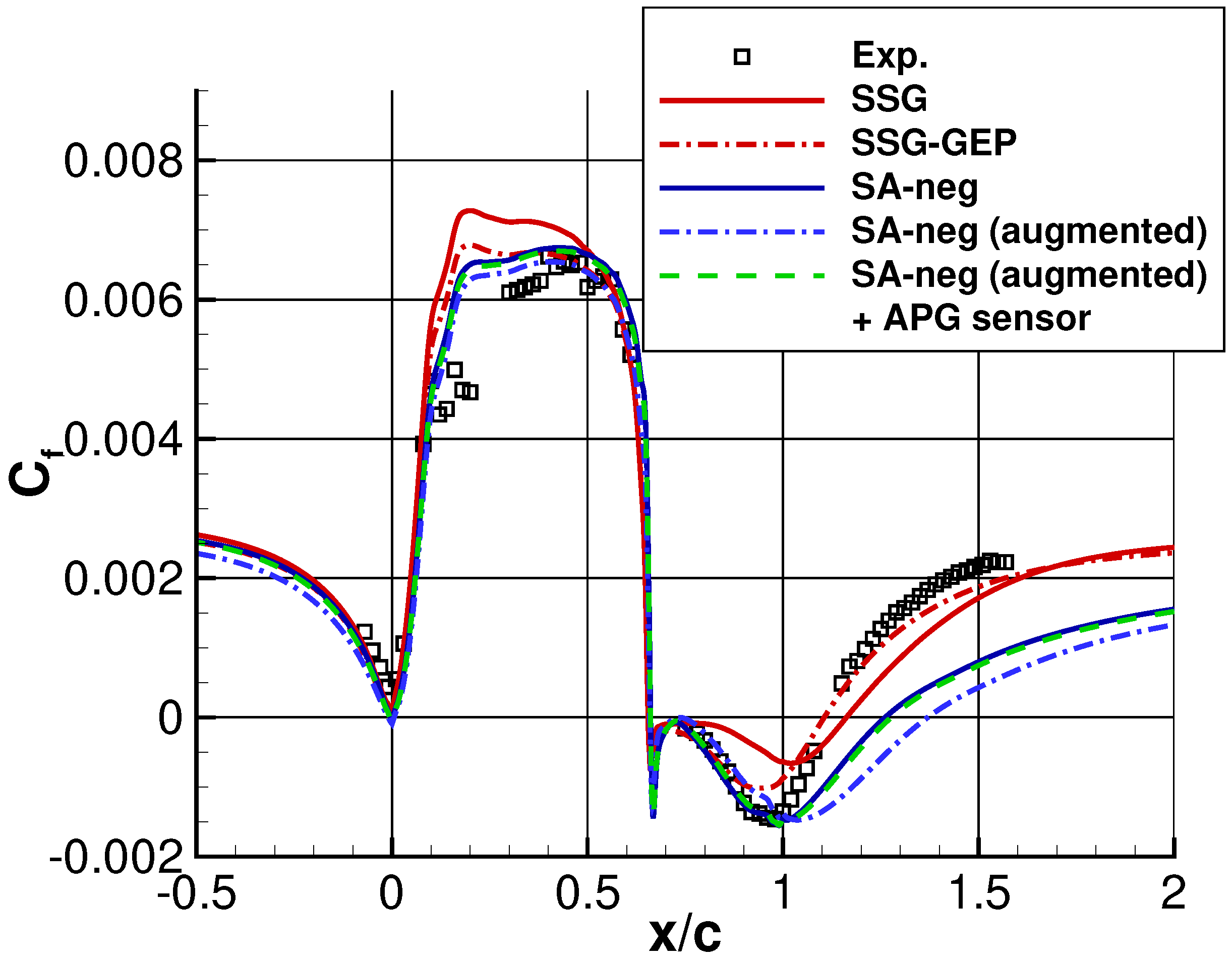
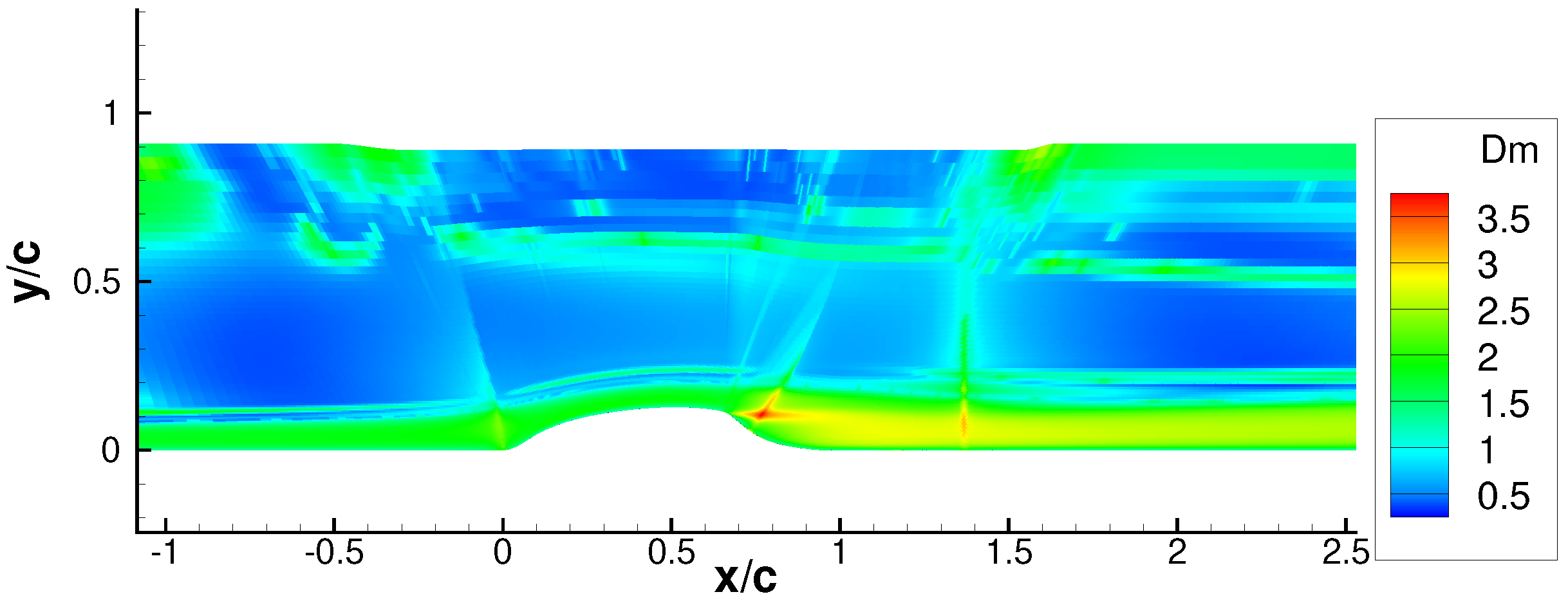
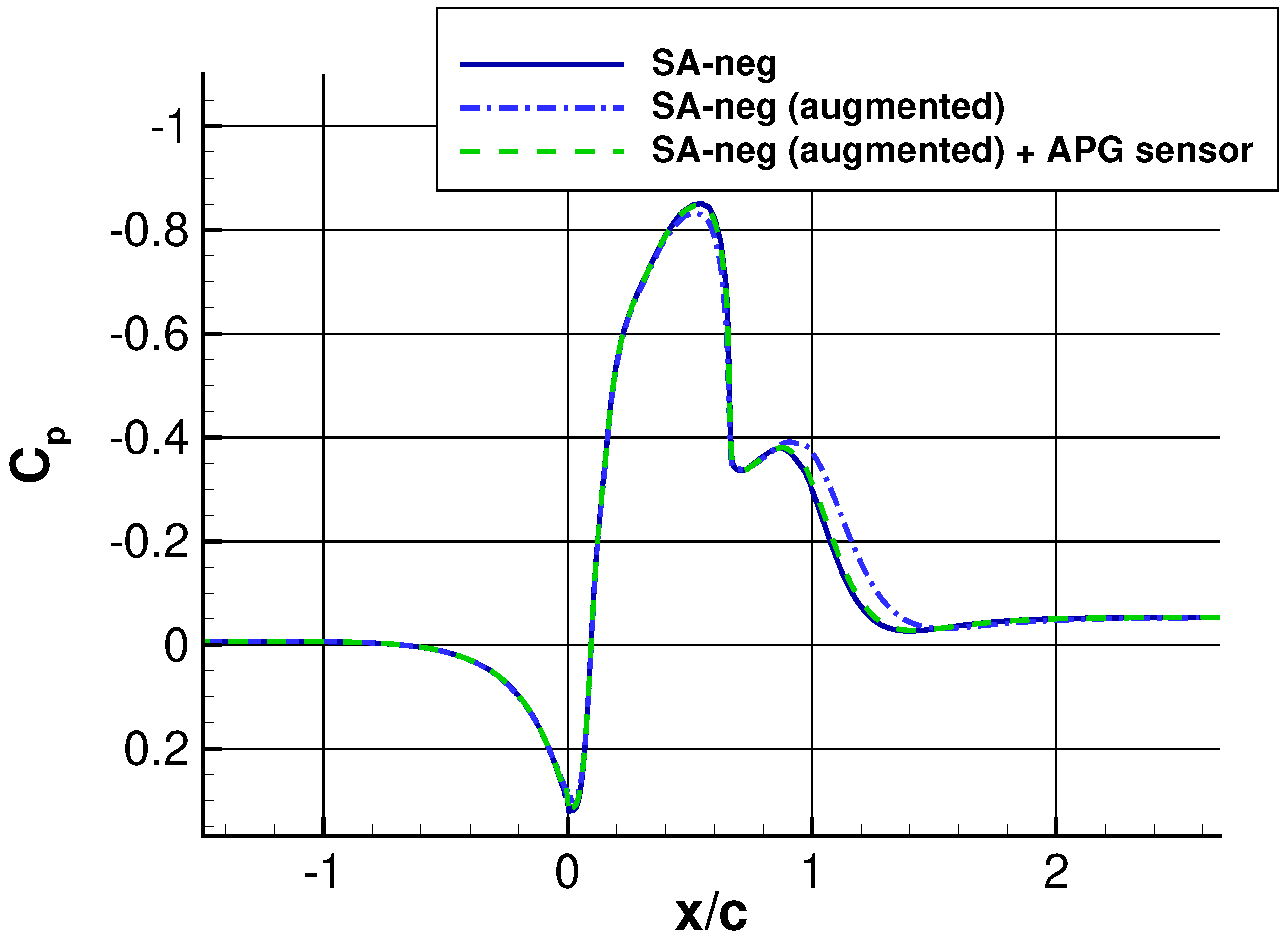
3.1. NASA Wall-Mounted Hump
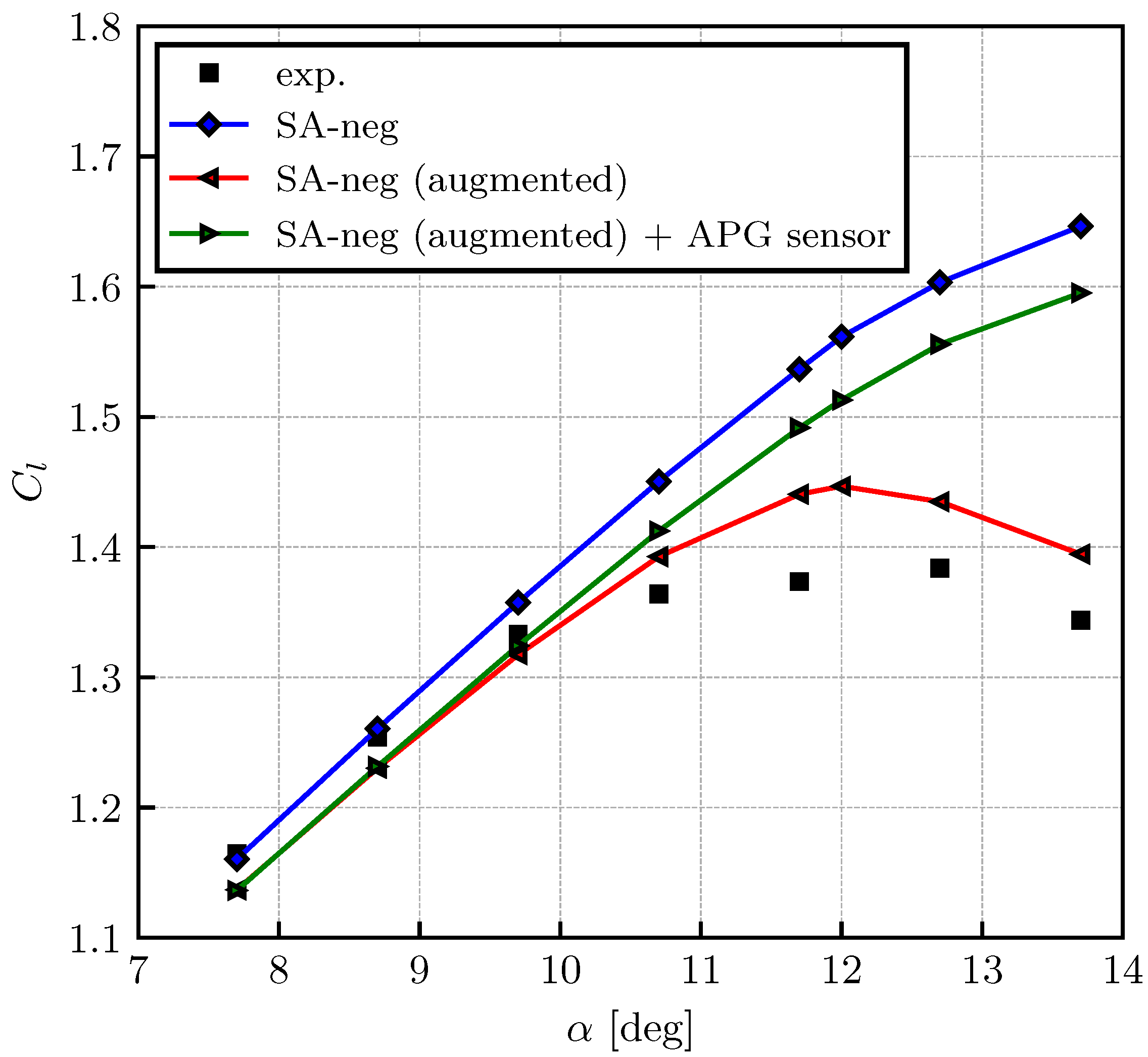
3.2. HGR-01 Airfoil
4. Application to Three-Dimensional Flows
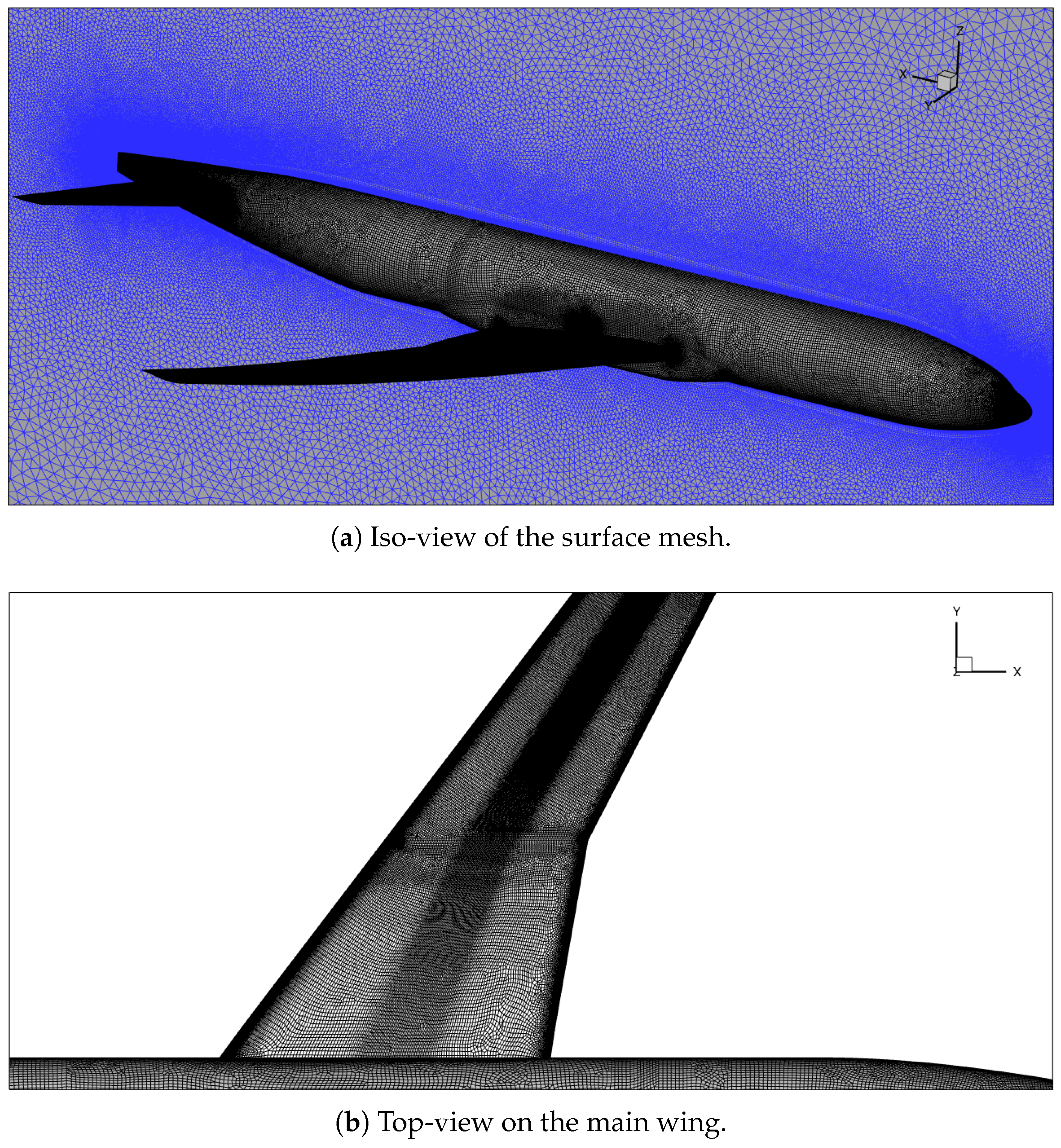
4.1. Test Case: NASA Common Research Model
4.2. Results
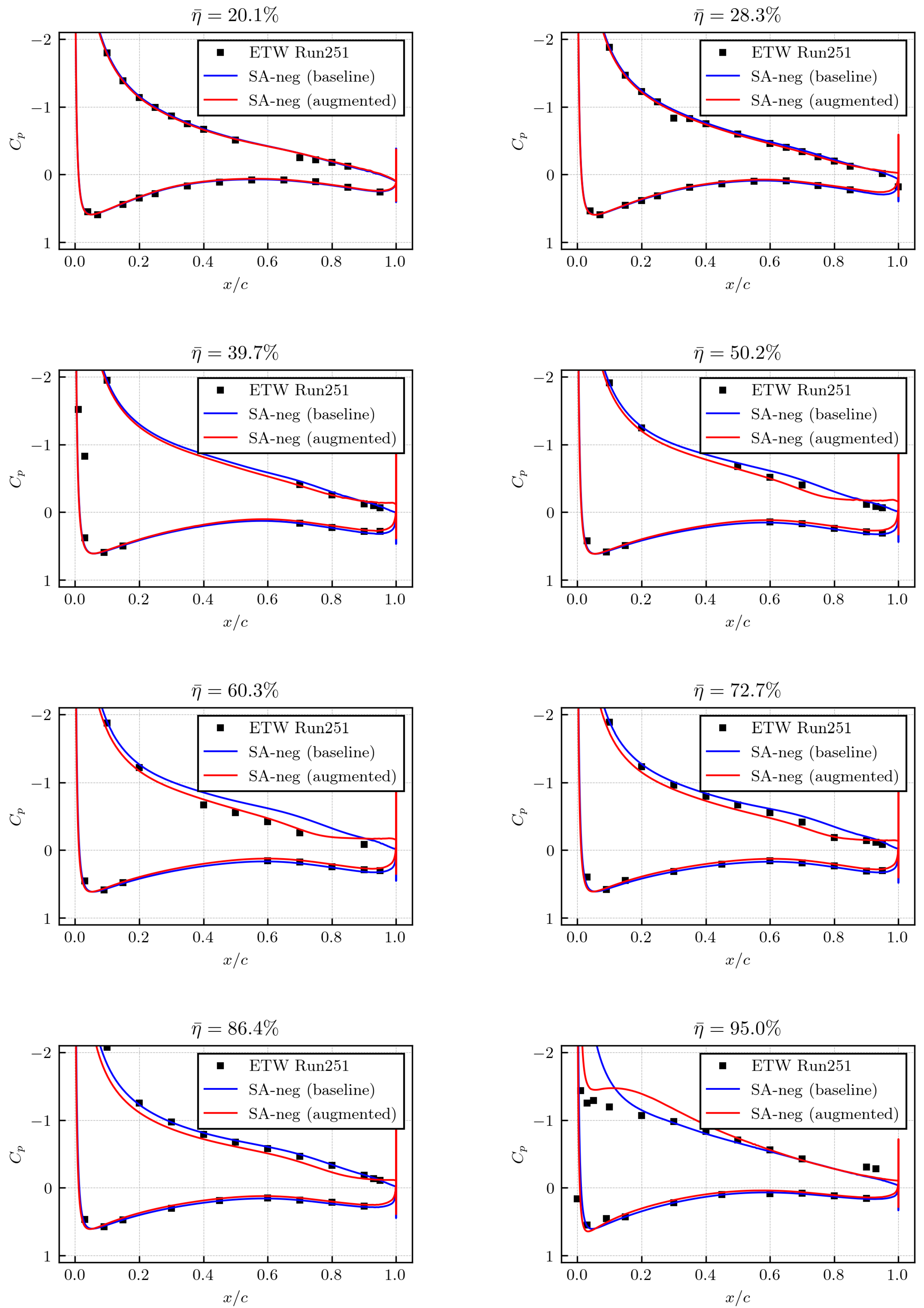
4.2.1. Pressure Coefficients
4.2.2. Model Correction Fields
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cary, A.W.; Chawner, J.; Duque, E.P.; Gropp, W.; Kleb, W.L.; Kolonay, R.M.; Nielsen, E.; Smith, B. CFD Vision 2030 Road Map: Progress and Perspectives. In Proceedings of the AIAA Aviation 2021 Forum, Virtual, 2–6 August 2021. [Google Scholar] [CrossRef]
- Weatheritt, J.; Sandberg, R. A novel evolutionary algorithm applied to algebraic modifications of the RANS stress–strain relationship. J. Comput. Phys. 2016, 325, 22–37. [Google Scholar] [CrossRef]
- Schmelzer, M.; Dwight, R.P.; Cinnella, P. Discovery of Algebraic Reynolds-Stress Models Using Sparse Symbolic Regression. Flow Turbul. Combust. 2020, 104, 579–603. [Google Scholar] [CrossRef]
- Ling, J.; Kurzawski, A.; Templeton, J. Reynolds averaged turbulence modelling using deep neural networks with embedded invariance. J. Fluid Mech. 2016, 807, 155–166. [Google Scholar] [CrossRef]
- Singh, A.P.; Duraisamy, K. Using field inversion to quantify functional errors in turbulence closures. Phys. Fluids 2016, 28, 045110. [Google Scholar] [CrossRef]
- Cherroud, S.; Merle, X.; Cinnella, P.; Gloerfelt, X. Space-dependent Aggregation of Stochastic Data-driven Turbulence Models. arXiv 2024, arXiv:2306.16996. [Google Scholar]
- Srivastava, V.; Rumsey, C.L.; Coleman, G.N.; Wang, L. On Generalizably Improving RANS Predictions of Flow Separation and Reattachment. In Proceedings of the AIAA Scitech 2024 Forum, Orlando, FL, USA, 8–12 January 2024. [Google Scholar] [CrossRef]
- Jäckel, F. A Closed-Form Correction for the Spalart–Allmaras Turbulence Model for Separated Flows. AIAA J. 2023, 61, 2319–2330. [Google Scholar] [CrossRef]
- Allmaras, S.R.; Johnson, F.T. Modifications and clarifications for the implementation of the Spalart-Allmaras turbulence model. In Proceedings of the Seventh International Conference on Computational Fluid Dynamics (ICCFD7), Big Island, HI, USA, 9–13 July 2012; Volume 1902. [Google Scholar]
- Holland, J.R.; Baeder, J.D.; Duraisamy, K. Field Inversion and Machine Learning with Embedded Neural Networks: Physics-Consistent Neural Network Training. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019. [Google Scholar] [CrossRef]
- Somers, D.M. Design and Experimental Results for the S809 Airfoil. Technical Report. 1997. Available online: https://www.osti.gov/biblio/437668/ (accessed on 30 May 2024).
- Wokoeck, R.; Krimmelbein, N.; Ortmanns, J.; Ciobaca, V.; Radespiel, R.; Krumbein, A. RANS Simulation and Experiments on the Stall Behaviour of an Airfoil with Laminar Separation Bubbles. In Proceedings of the 44th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 9–12 January 2006. [Google Scholar] [CrossRef]
- Schwamborn, D.; Gerhold, T.; Heinrich, R. The DLR TAU-Code: Recent Applications in Research and Industry. In Proceedings of the European Conference on Computational Fluid Dynamics, ECCOMAS CFD 2006, Delft, The Netherlands, 5–8 September 2006. [Google Scholar]
- Brezillon, J.; Dwight, R. Discrete Adjoint of the Navier-Stokes Equations for Aerodynamic Shape Optimization. In Proceedings of the EUROGEN 2005—Sixth Conference on Evolutionary and Deterministic Methods for Design, Optimization and Control with Applications to Industrial and Societal Problems, Munich, Germany, 2–14 September 2005. [Google Scholar]
- Bekemeyer, P.; Bertram, A.; Chaves, D.A.H.; Ribeiro, M.D.; Garbo, A.; Kiener, A.; Sabater, C.; Stradtner, M.; Wassing, S.; Widhalm, M.; et al. Data-Driven Aerodynamic Modeling Using the DLR SMARTy Toolbox. In Proceedings of the AIAA AVIATION 2022 Forum, Chicago, IL, USA, 27 June–1 July 2022. AIAA 2022-3899. [Google Scholar] [CrossRef]
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L.; et al. PyTorch: An Imperative Style, High-Performance Deep Learning Library. arXiv 2019, arXiv:1912.01703. [Google Scholar]
- Eisfeld, B. The importance of turbulent equilibrium for Reynolds-stress modeling. Phys. Fluids 2022, 34, 025123. [Google Scholar] [CrossRef]
- Nishi, Y.; Knopp, T.; Probst, A.; Grabe, C.; Krumbein, A. Towards local application oF data-driven turbulence modeling for separated flows. In Proceedings of the 14th International ERCOFTAC Symposium on Engineering, Turbulence, Modelling and Measurements, ETMM14, Barcelona, Spain, 6–8 September 2023. [Google Scholar]
- Ling, J.; Kurzawski, A. Data-driven Adaptive Physics Modeling for Turbulence Simulations. In Proceedings of the 23rd AIAA Computational Fluid Dynamics Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar] [CrossRef]
- Knopp, T.; Reuther, N.; Novara, M.; Schanz, D.; Schülein, E.; Schröder, A.; Kähler, C.J. Modification of the SSG/LRR-Omega Model for Turbulent Boundary Layer Flows in an Adverse Pressure Gradient. Flow Turbul. Combust. 2023, 111, 409–438. [Google Scholar] [CrossRef]
- Naughton, J.W.; Viken, S.; Greenblatt, D. Skin Friction Measurements on the NASA Hump Model. AIAA J. 2006, 44, 1255–1265. [Google Scholar] [CrossRef]
- Alaya, E.; Grabe, C.; Eisfeld, B. Evolutionary Algorithm applied to Differential Reynolds Stress Model for Turbulent Boundary Layer subjected to an Adverse Pressure Gradient. In Proceedings of the AIAA AVIATION 2022 Forum, Chicago, IL, USA, 27 June–1 July 2022. [Google Scholar] [CrossRef]
- Speziale, C.G.; Sarkar, S.; Gatski, T.B. Modelling the pressure–strain correlation of turbulence: An invariant dynamical systems approach. J. Fluid Mech. 1991, 227, 245–272. [Google Scholar] [CrossRef]
- Yacine Bentaleb, S.L.; Leschziner, M.A. Large-eddy simulation of turbulent boundary layer separation from a rounded step. J. Turbul. 2012, 13, N4. [Google Scholar] [CrossRef]
- Ling, J.; Templeton, J. Evaluation of machine learning algorithms for prediction of regions of high Reynolds averaged Navier Stokes uncertainty. Phys. Fluids 2015, 27, 085103. [Google Scholar] [CrossRef]
- Boyet, G. ESWIRP: European strategic wind tunnels improved research potential program overview. Ceas Aeronaut. J. 2018, 9, 249–268. [Google Scholar] [CrossRef]
- Vassberg, J.; Tinoco, E.; Mani, M.; Rider, B.; Zickuhr, T.; Levy, D.; Brodersen, O.; Eisfeld, B.; Crippa, S.; Wahls, R.; et al. Summary of the Fourth AIAA CFD Drag Prediction Workshop. In Proceedings of the 28th AIAA Applied Aerodynamics Conference, Chicago, IL, USA, 28 June–1 July 2010. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nishi, Y.; Krumbein, A.; Knopp, T.; Probst, A.; Grabe, C. On the Generalization Capability of a Data-Driven Turbulence Model by Field Inversion and Machine Learning. Aerospace 2024, 11, 592. https://doi.org/10.3390/aerospace11070592
Nishi Y, Krumbein A, Knopp T, Probst A, Grabe C. On the Generalization Capability of a Data-Driven Turbulence Model by Field Inversion and Machine Learning. Aerospace. 2024; 11(7):592. https://doi.org/10.3390/aerospace11070592
Chicago/Turabian StyleNishi, Yasunari, Andreas Krumbein, Tobias Knopp, Axel Probst, and Cornelia Grabe. 2024. "On the Generalization Capability of a Data-Driven Turbulence Model by Field Inversion and Machine Learning" Aerospace 11, no. 7: 592. https://doi.org/10.3390/aerospace11070592