
Framework for Numerical 6DOF Simulation with Focus on a Wing Deforming UAV in Perch Landing †



Abstract
:1. Introduction
2. Numerical Methods
2.1. Solver
2.2. Capabilities of the Framework for 6DOF Simulations
- Moving grid for 6DOF simulations
- Grid deformation and Arbitrary Mesh Interface (AMI)
- Addition of algorithm for elevator rotation and emulated propeller lift
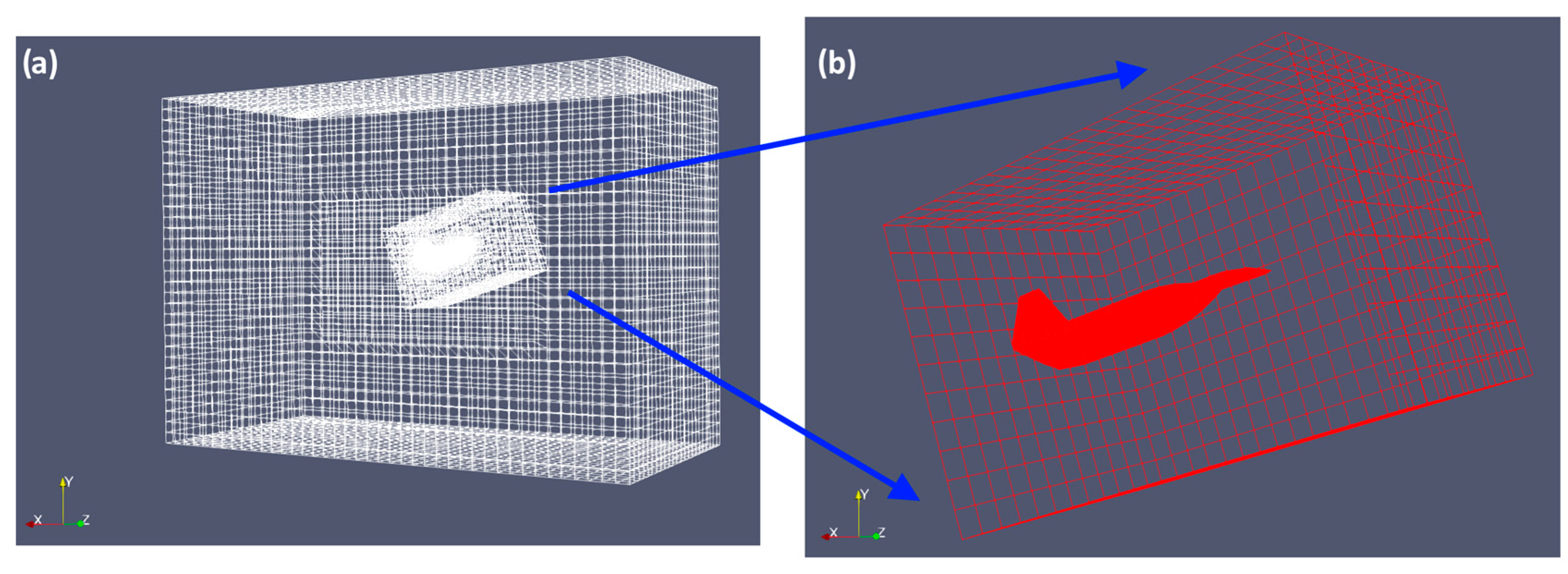
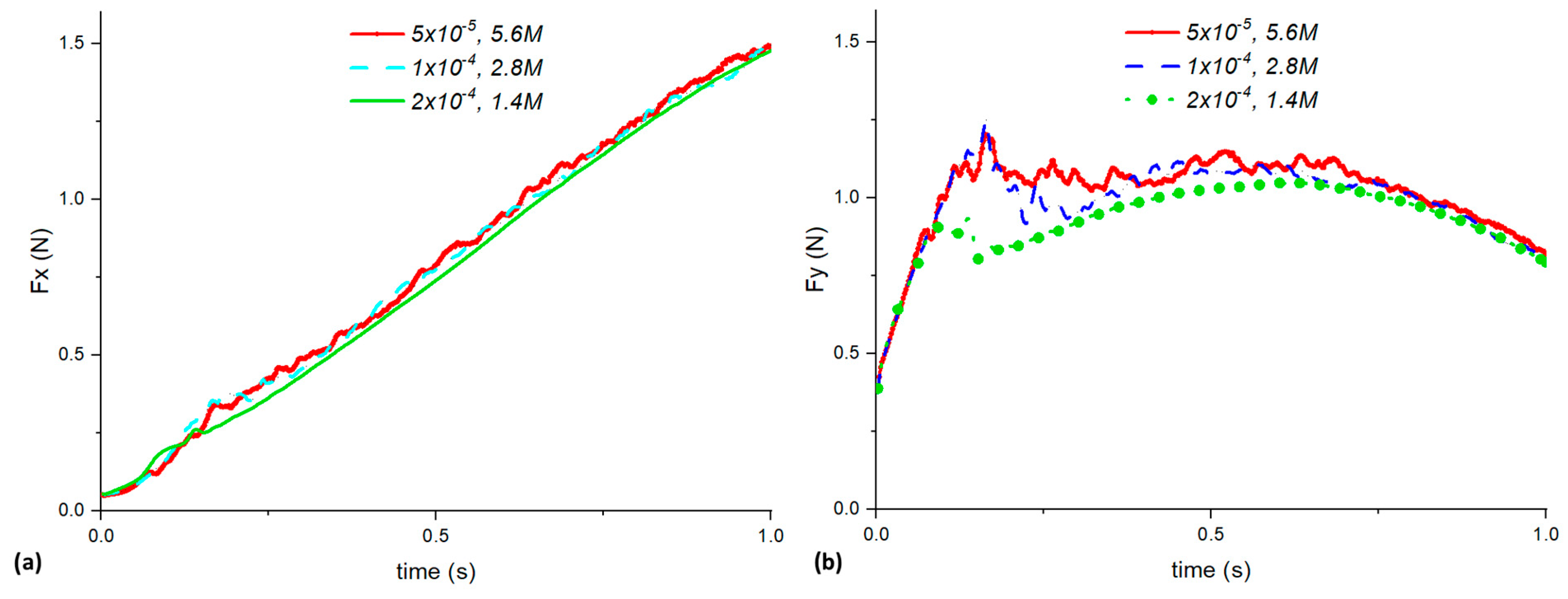
2.3. Grid Convergence Study and Validations
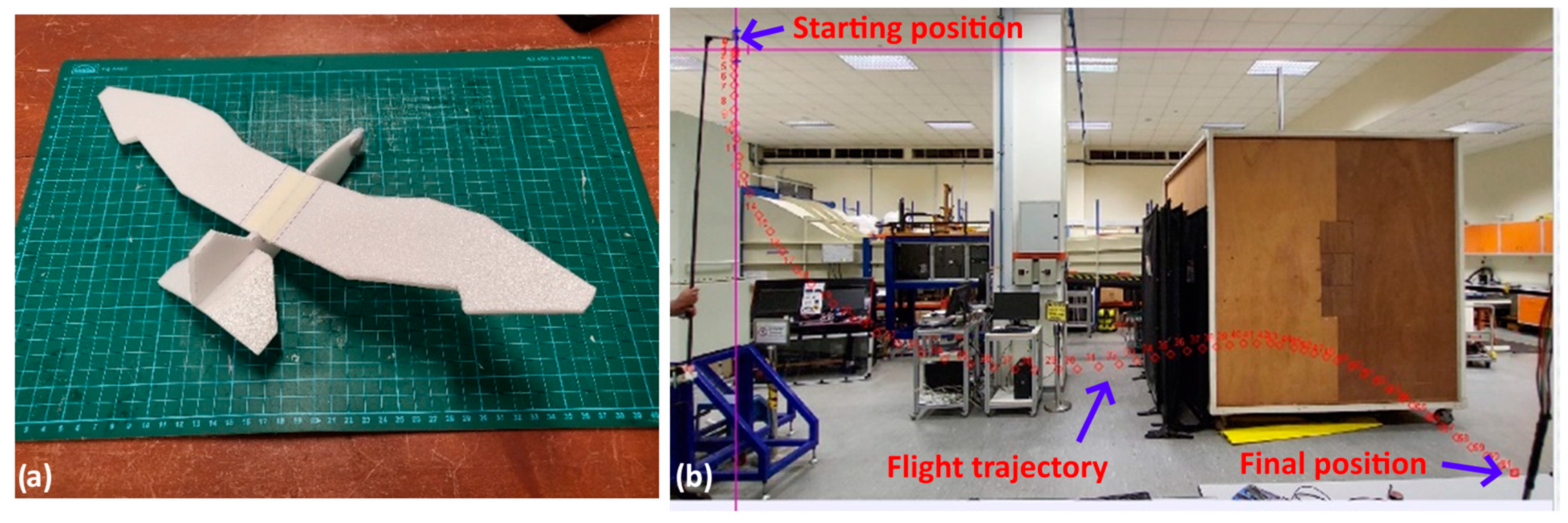
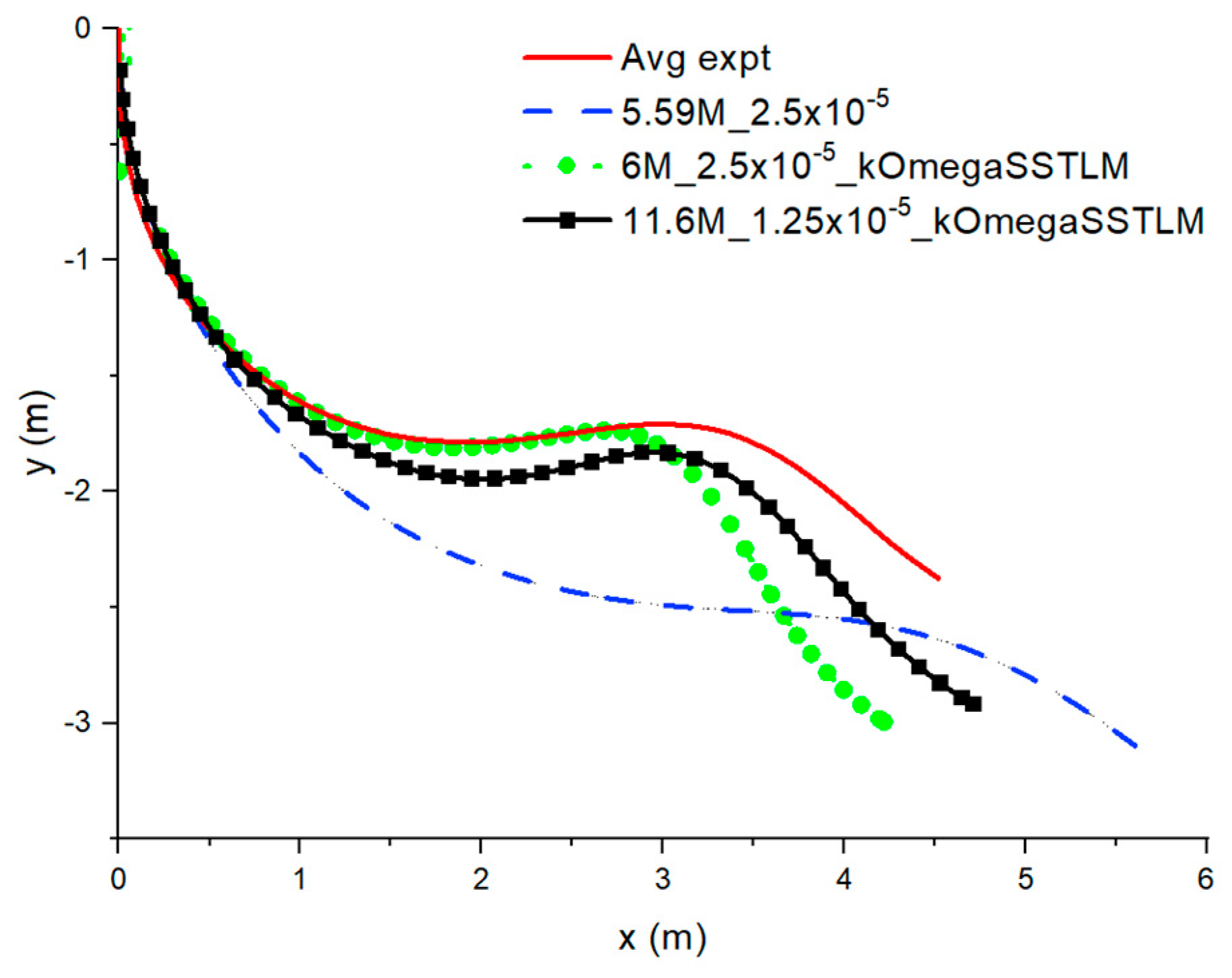
2.4. Experimental Validation of the MG6DOFM Solver
3. Research Methodology
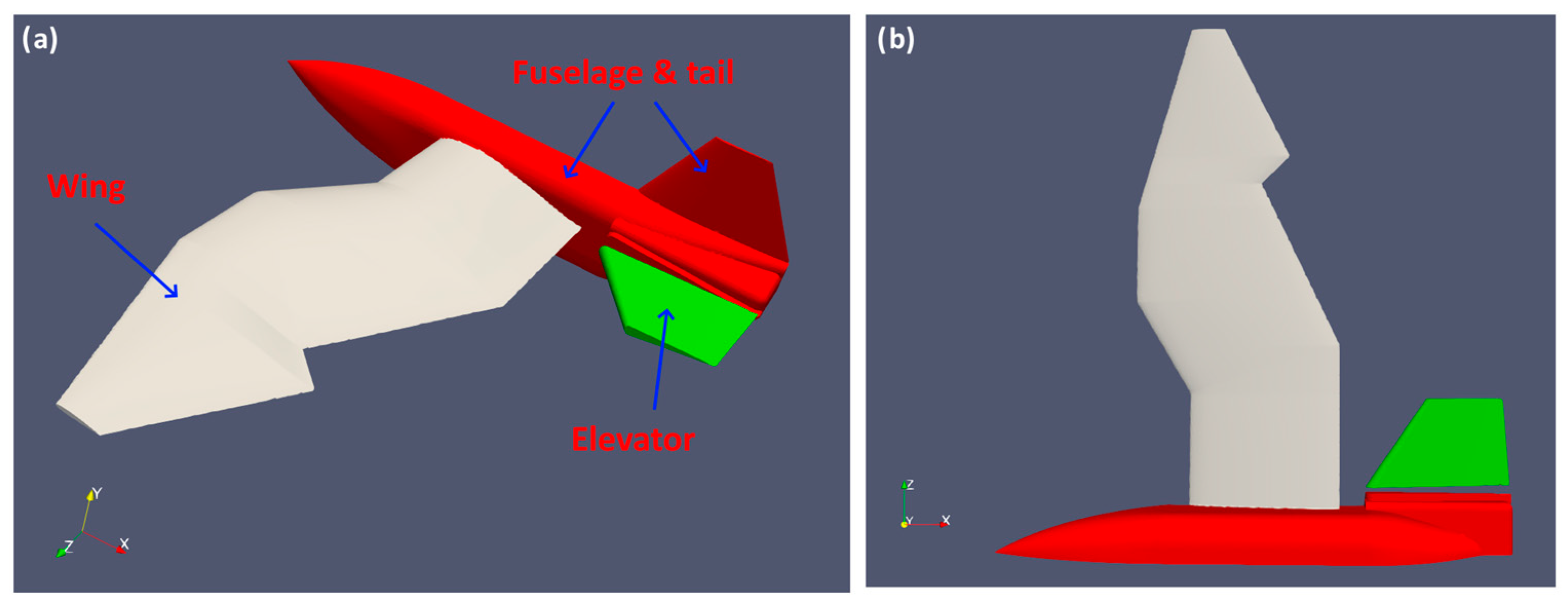
3.1. UAV Prototype and Wing Deformation
3.2. Elevator Control
| Pseudocode for elevator’s rotational motion with a simple feedback algorithm | |
| omega of elevator = -feedback_coeff × (desired_pitch_angle_ − saved_pitch) | |
| angle_ = angle_old_ + omega of elevator × delta_t, | |
3.3. Emulated Propeller Lift
| Pseudocode for emulated propeller lift with a simple feedback algorithm | |||
| if t < activation_time then | |||
| propeller_lift = 0 | |||
| propeller_lift_x = 0 | |||
| propeller_lift_y = 0 | |||
| else | |||
| propeller_lift_y = (t − activation_time) × (t − activation_time) × propeller_coeff | |||
| propeller_lift = propeller_lift_y/abs(sin(angle_old)) | |||
| if (propeller_lift > max_propeller_lift_) then | |||
| propeller_lift = max_propeller_lift | |||
| propeller_lift_x = propeller_lift × cos(-angle_old) | |||
| propeller_lift_y = propeller_lift × abs(sin(angle_old)) | |||
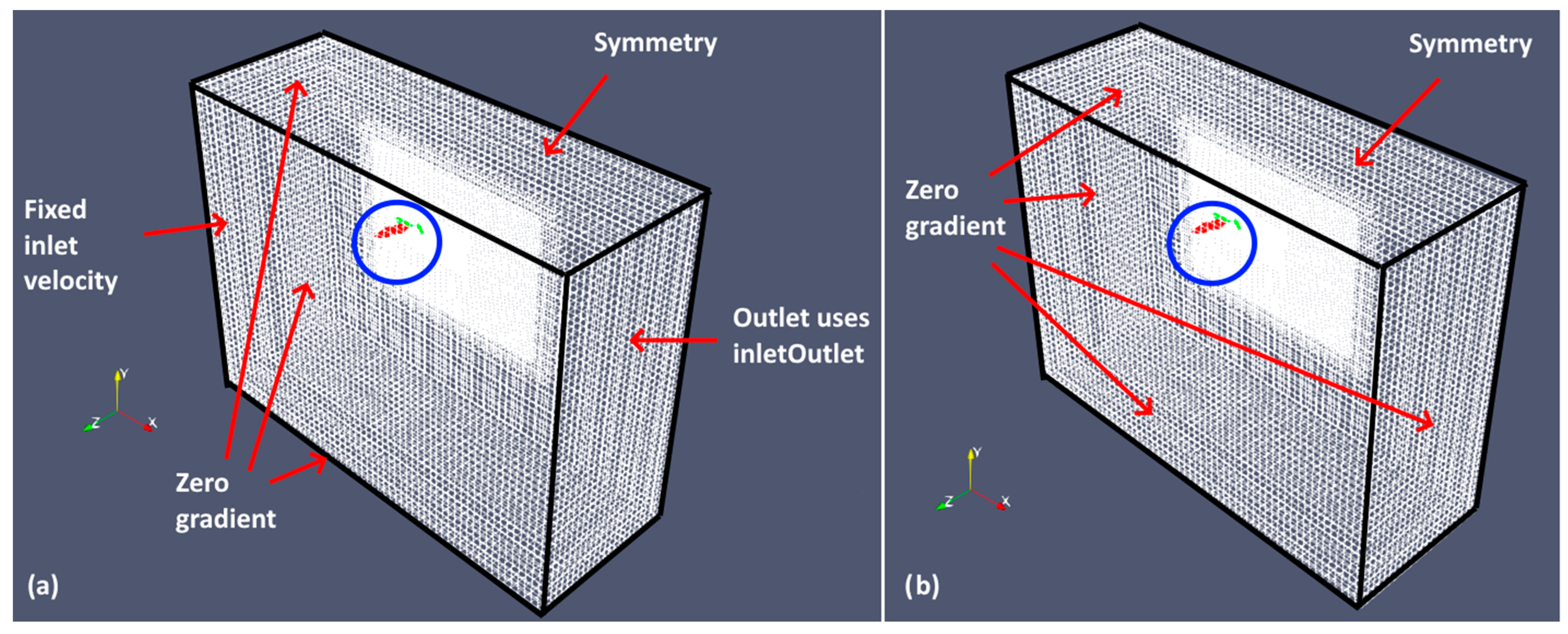
3.4. Simulation Setup
4. Results and Discussions
4.1. Pure Wing Deformation Results
- (1)
- velocity/pressure flow fields;
- (2)
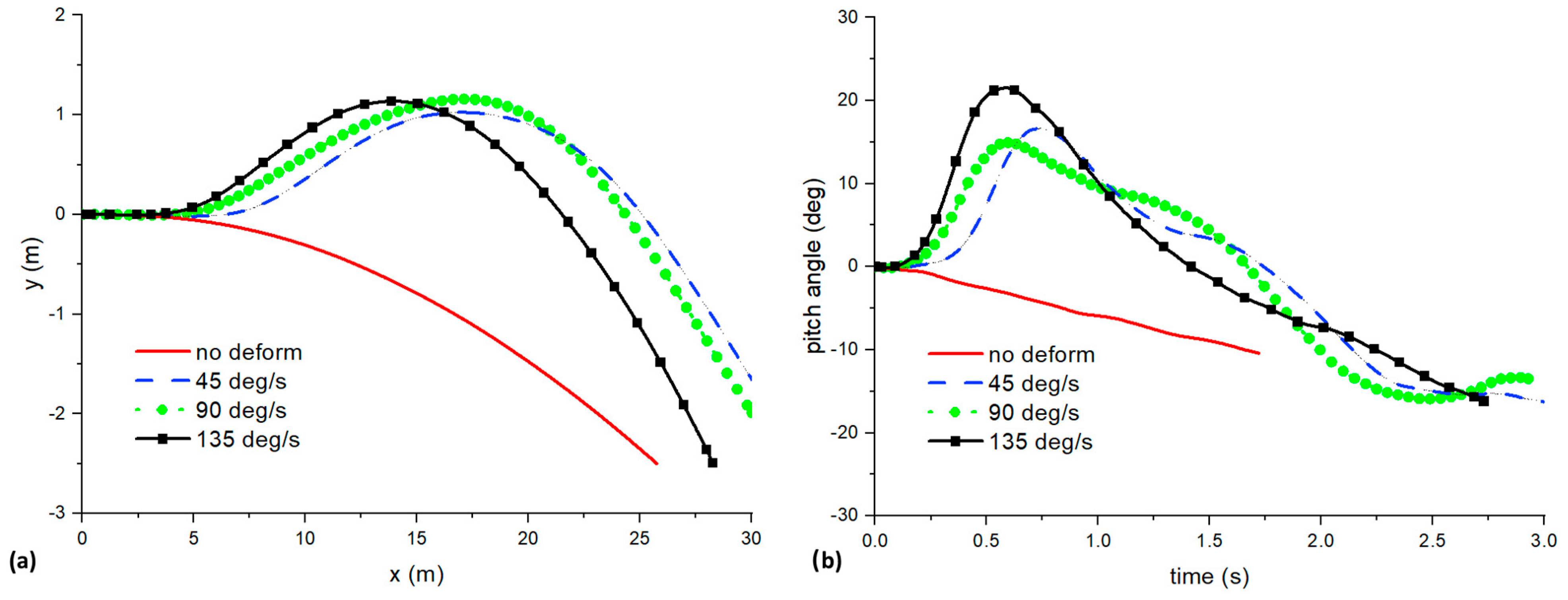
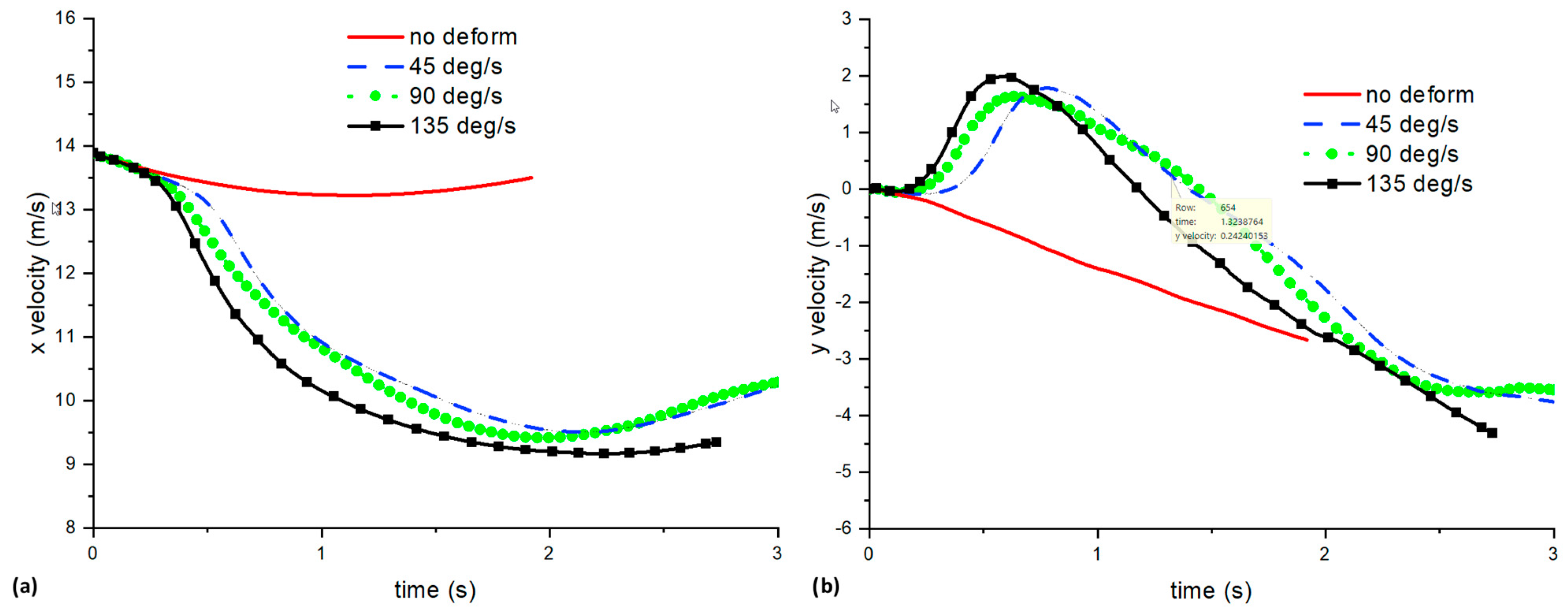
- x/y displacement, velocity, and acceleration;
- (3)
- pitch angle and angular velocity of the UAV.
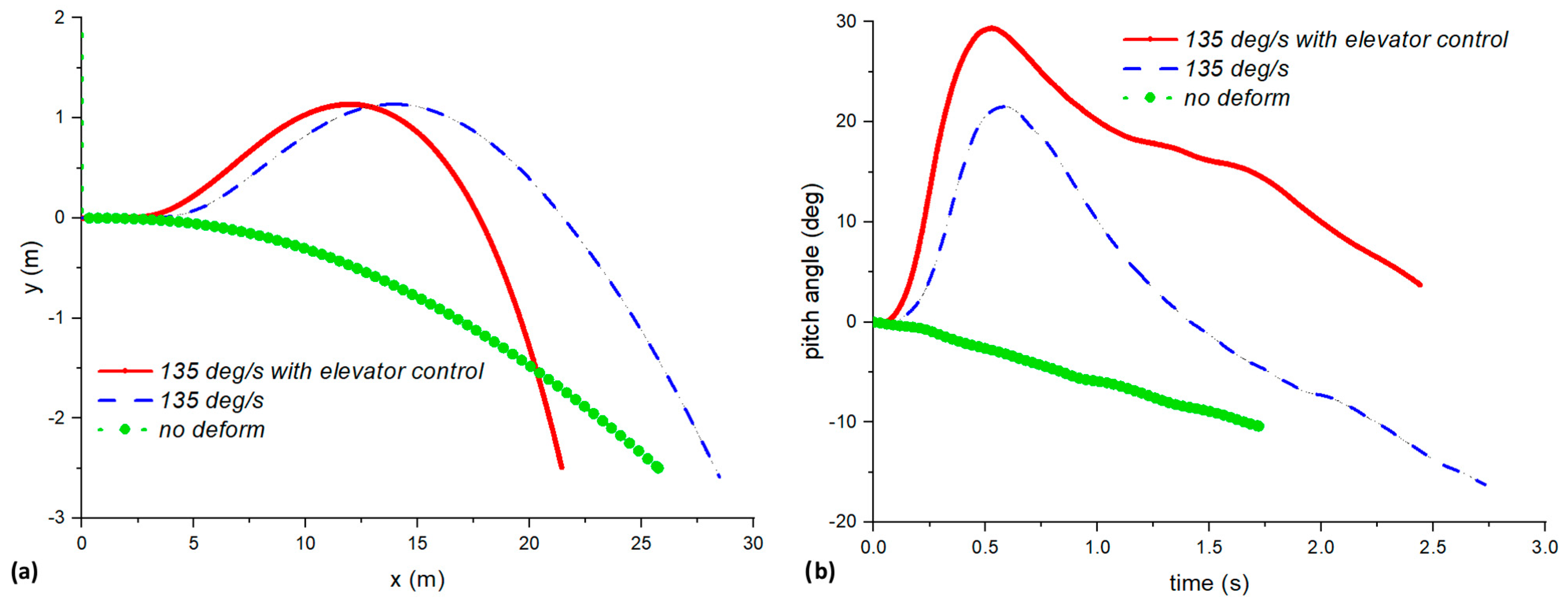
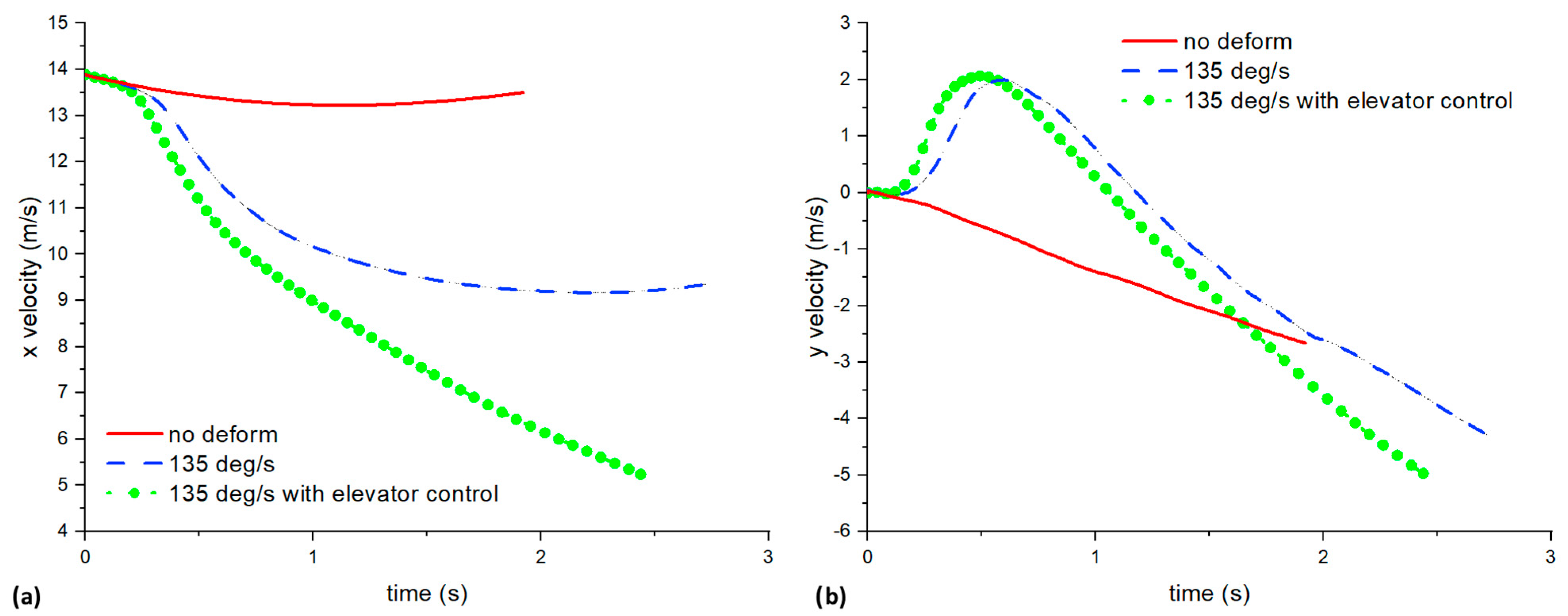
4.2. Wing Deformation with Elevator Control
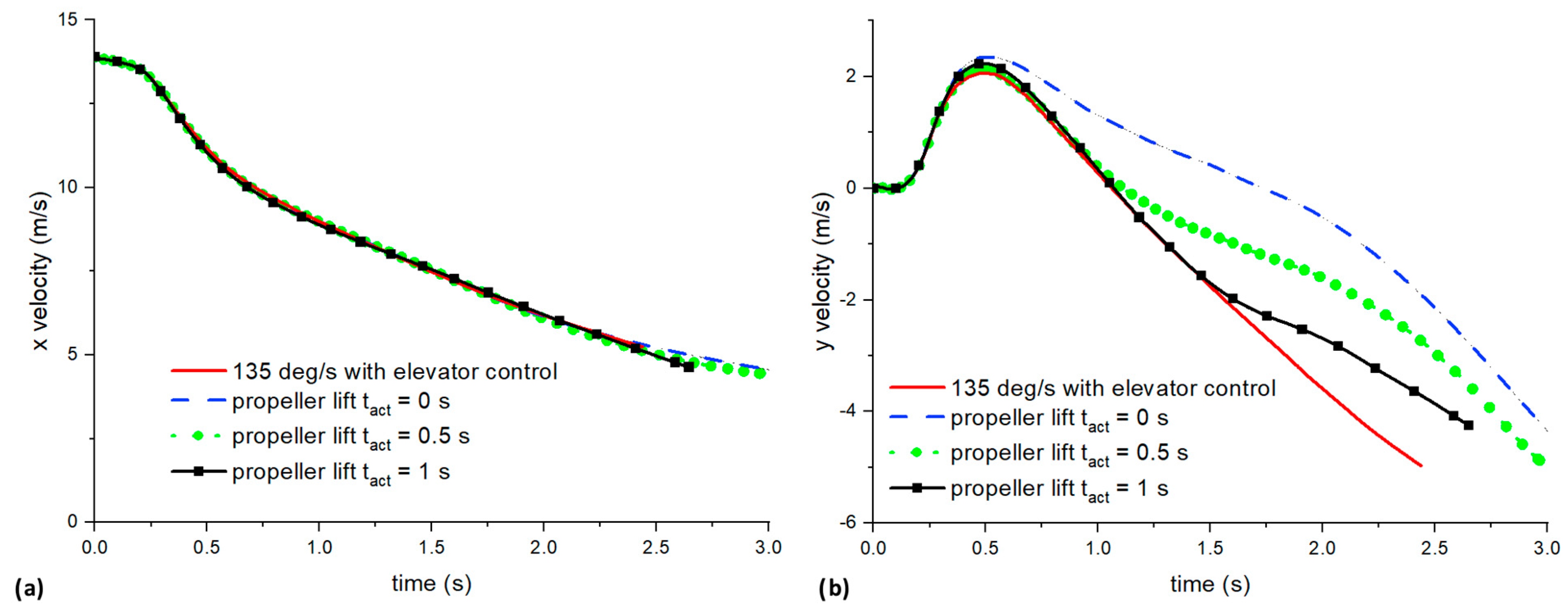
4.3. Wing Deformation with Elevator Control and Emulated Propeller Lift
5. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Moore, J.; Cory, R.; Tedrake, R. Robust Post-Stall Perching with a Simple Fixed-Wing Glider Using LQR-Trees. Bioinspir. Biomim. 2014, 9, 025013. [Google Scholar] [CrossRef] [PubMed]
- Paranjape, A.; Kim, J.; Gandhi, N.; Chung, S.-J. Experimental Demonstration of Perching by an Articulated Wing MAV. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Portland, OR, USA, 8–11 August 2011. [Google Scholar] [CrossRef]
- Waldock, A.; Greatwood, C.; Salama, F.; Richardson, T. Learning to Perform a Perched Landing on the Ground Using Deep Reinforcement Learning. J. Intell. Robot. Syst. 2018, 92, 685–704. [Google Scholar] [CrossRef]
- Wickenheiser, A.M.; Garcia, E. Longitudinal Dynamics of a Perching Aircraft. J. Aircr. 2006, 43, 1386–1392. [Google Scholar] [CrossRef]
- Li, H.; Li, Y.; Zhao, Z.; Wang, X.; Yang, H.; Ma, S. High-Speed Virtual Flight Testing Platform for Performance Evaluation of Pitch Maneuvers. Aerospace 2023, 10, 962. [Google Scholar] [CrossRef]
- Lukić, N.; Ivanov, T.; Svorcan, J.; Simonović, A. Numerical Investigation and Optimization of a Morphing Airfoil Designed for Lower Reynolds Number. Aerospace 2024, 11, 252. [Google Scholar] [CrossRef]
- Cheng, B.; Guo, Z. Study on Small UAVs’ Deep Stall Landing Procedure. In Proceedings of the 2017 5th International Conference on Mechanical, Automotive and Materials Engineering (CMAME), Guangzhou, China, 1–3 August 2017. [Google Scholar] [CrossRef]
- Adhikari, D.R.; Loubimov, G.; Kinzel, M.P.; Bhattacharya, S. Effect of Wing Sweep on a Perching Maneuver. Phys. Rev. Fluids 2022, 7, 044702. [Google Scholar] [CrossRef]
- Tay, W.B.; Chan, W. Numerical 6DOF Simulation of a Perching Wing Deforming UAV. In Proceedings of the AIAA SCITECH 2023 Forum, National Harbor, MD, USA/Online, 23–27 January 2023. [Google Scholar] [CrossRef]
- Weller, H.G.; Tabor, G.; Jasak, H.; Fureby, C. A Tensorial Approach to Computational Continuum Mechanics Using Object-Oriented Techniques. Comput. Phys. 1998, 12, 620. [Google Scholar] [CrossRef]
- Issa, R.I. Solution of the Implicitly Discretised Fluid Flow Equations by Operator-Splitting. J. Comput. Phys. 1986, 62, 40–65. [Google Scholar] [CrossRef]
- Patankar, S.V.; Spalding, D.B. A Calculation Procedure For Heat, Mass And Momentum Transfer In Three-Dimensional Parabolic Flows. Int. J. Heat Mass Transf. 1972, 15, 1787–1806. [Google Scholar] [CrossRef]
- Petersson, N.A. Hole-Cutting for Three-Dimensional Overlapping Grids. SIAM J. Sci. Comput. 1999, 21, 646–665. [Google Scholar] [CrossRef]
- Mittal, R.; Iaccarino, G. Immersed Boundary Methods. Annu. Rev. Fluid Mech. 2005, 37, 239–261. [Google Scholar] [CrossRef]
- Schnepf, C.; Richter, K. Investigation of the Transient Aerodynamic Behavior of a UAV with Folding Wings in a Generic Airdrop. In Proceedings of the AIAA SCITECH 2024 Forum, Orlando, FL, USA, 8–12 January 2024. [Google Scholar] [CrossRef]
- Brown, D. Tracker; Cabrillo College: Aptos, CA, USA, 2023. [Google Scholar]
- Langtry, R.B.; Menter, F.R. Correlation-Based Transition Modeling for Unstructured Parallelized Computational Fluid Dynamics Codes. AIAA J. 2009, 47, 2894–2906. [Google Scholar] [CrossRef]
- Tay, W.B.; Chong, R.O.; Tay, J.C.M. Numerical Validation and Sensitivity Tests of a Model Aircraft in Free Fall. In Proceedings of the AIAA SCITECH 2024 Forum, Orlando, FL, USA, 8–12 January 2024. [Google Scholar] [CrossRef]
- Chin, D.D.; Lentink, D. Birds Repurpose the Role of Drag and Lift to Take off and Land. Nat. Commun. 2019, 10, 5354. [Google Scholar] [CrossRef] [PubMed]
- Ellington, C.P. The Aerodynamics of Flapping Animal Flight. Am. Zool. 1984, 24, 95–105. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cases | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Wing deformation speed (deg/s) | 0 (non-deforming) | 45 | 90 | 135 |
| Fx (N) | Fy (N) | Mz (Nm) |
|---|---|---|
| 0.90 | 7.50 | 0.0064 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tay, W.-B.; Chan, W.-L.; Chong, R.-O.; Tay Chien-Ming, J. Framework for Numerical 6DOF Simulation with Focus on a Wing Deforming UAV in Perch Landing. Aerospace 2024, 11, 657. https://doi.org/10.3390/aerospace11080657
Tay W-B, Chan W-L, Chong R-O, Tay Chien-Ming J. Framework for Numerical 6DOF Simulation with Focus on a Wing Deforming UAV in Perch Landing. Aerospace. 2024; 11(8):657. https://doi.org/10.3390/aerospace11080657
Chicago/Turabian StyleTay, Wee-Beng, Woei-Leong Chan, Ren-Ooi Chong, and Jonathan Tay Chien-Ming. 2024. "Framework for Numerical 6DOF Simulation with Focus on a Wing Deforming UAV in Perch Landing" Aerospace 11, no. 8: 657. https://doi.org/10.3390/aerospace11080657