
Integrating Model-Based Systems Engineering into CubeSat Development: A Case Study of the BOREALIS Mission

 , , ,
, , ,  , , , ,
, , , ,  ,
,  , , , , , ,
, , , , , ,  , ,
, ,  and add
Show full author list
and add
Show full author list
Abstract
:1. Introduction
2. The BOREALS Mission
2.1. Importance of Biofilms
2.2. Past Biofilm Experiments and Findings
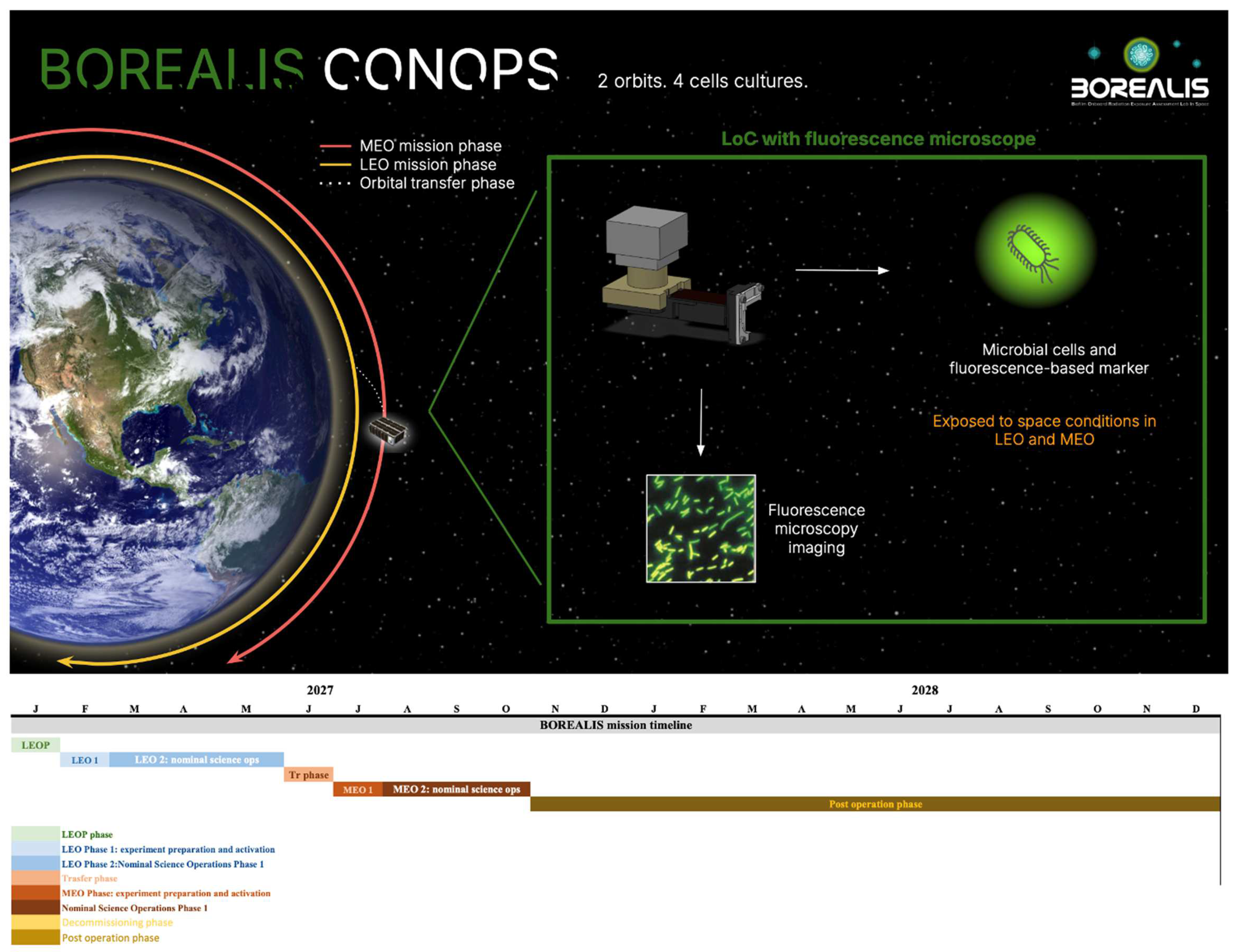
2.3. BOREALIS Mission Overview
2.4. Orbital Transfer
- To distinguish the effects associated with microgravity and cosmic radiation, the satellite will have to operate in orbits in which the intensity of the cosmic radiation is significantly different;
- The deployment orbit must be compatible with the rideshare performance of Vega-C (and eventually other launch vehicles);
- Within 5 years from the end of the mission, the satellite will no longer have to orbit in LEO (below 2000 km); the TID collected during the operative mission will be limited to ensure the survival of the microbial cultures and the operativity of on-board devices and subsystems.
- Transferring the satellite to an MEO with an altitude of 2000 km or higher also satisfies specification (3);
- Even though Vega-C (and other launchers) can deploy a spacecraft to an altitude of 1100 km, common rideshare opportunities address altitudes between 450 km and 800 km; therefore, selecting such an orbit simplifies satisfying specification (2).
2.4.1. Monopropellant Thruster
2.4.2. Hall-Effect Thruster
2.4.3. RF Ion-Thruster
2.5. Radiation, Dose, and Shielding Generalities
- Orbital radiative sources, such as trapped particles (TPs), galactic cosmic rays (GCRs), and possible emissions of solar energy particles (SEPs), as foreseen by SPENVIS (Space Environment Information System) [44] and IRENE (International Radiation Environment Near Earth) codes [45] at mission epoch (reference period 1 January 2026) at the given altitude and orbital inclination.
- A 3D satellite geometry layout, including all the relevant components (payload, spectrometers, dosimeters, shielding, etc.). The layout definition is, at this stage, significantly simplified, but it will be increasingly detailed as the concurrent design proceeds. The pressurised payload is divided into two regions. The first one, denoted as a non-shielded payload (NS-payload), is protected from the external radiative environment by the external CubeSat shell (including the solar panels) plus the 3 mm of aluminium of the payload shell. The second payload region, the shielded payload (S-payload), has an additive multi-layer shielding solution constituted of a first layer of metallic tungsten (thickness = 0.7 mm) to stop charged particles, followed by a second layer of PEEK (Polyether Ether Ketone) that allows for secondary neutrons slowing down and scattering (thickness 15 mm), and a last aluminium layer (thickness 5 mm) to attenuate low-energy charged secondaries. The thickness of each layer has been optimised based on the outcomes of a set of FLUKA simple three-slab problems executed by an automated UNIX shell script, in which material thickness and layer sequence are changed within pre-established limits. Once all the simulations are finished, the sequence of layers of the three materials minimising the ionisation dose has been included in the complete satellite layout. Finally, in both NS and S-payloads, identical cylindrical sample holders filled with a biomaterial (ICRU #37-1984) were located. A RADFET dosimeter modelled according to [42] is located close to each sample holder. The dose responses from the biomaterial and the one obtained from the RADFET allow for the consideration of the coherency between the physical dose absorbed from the biosample (that cannot be measured) and the one estimated by the RADFET dosimeter (that shall be measured).
- A set estimator has been placed in various regions of the satellite layout with the scope of quantifying doses and fluxes of primary and secondary particles and ions. It is intended that a subset of such results will be used to stay within the scope of the present work.
2.6. TID
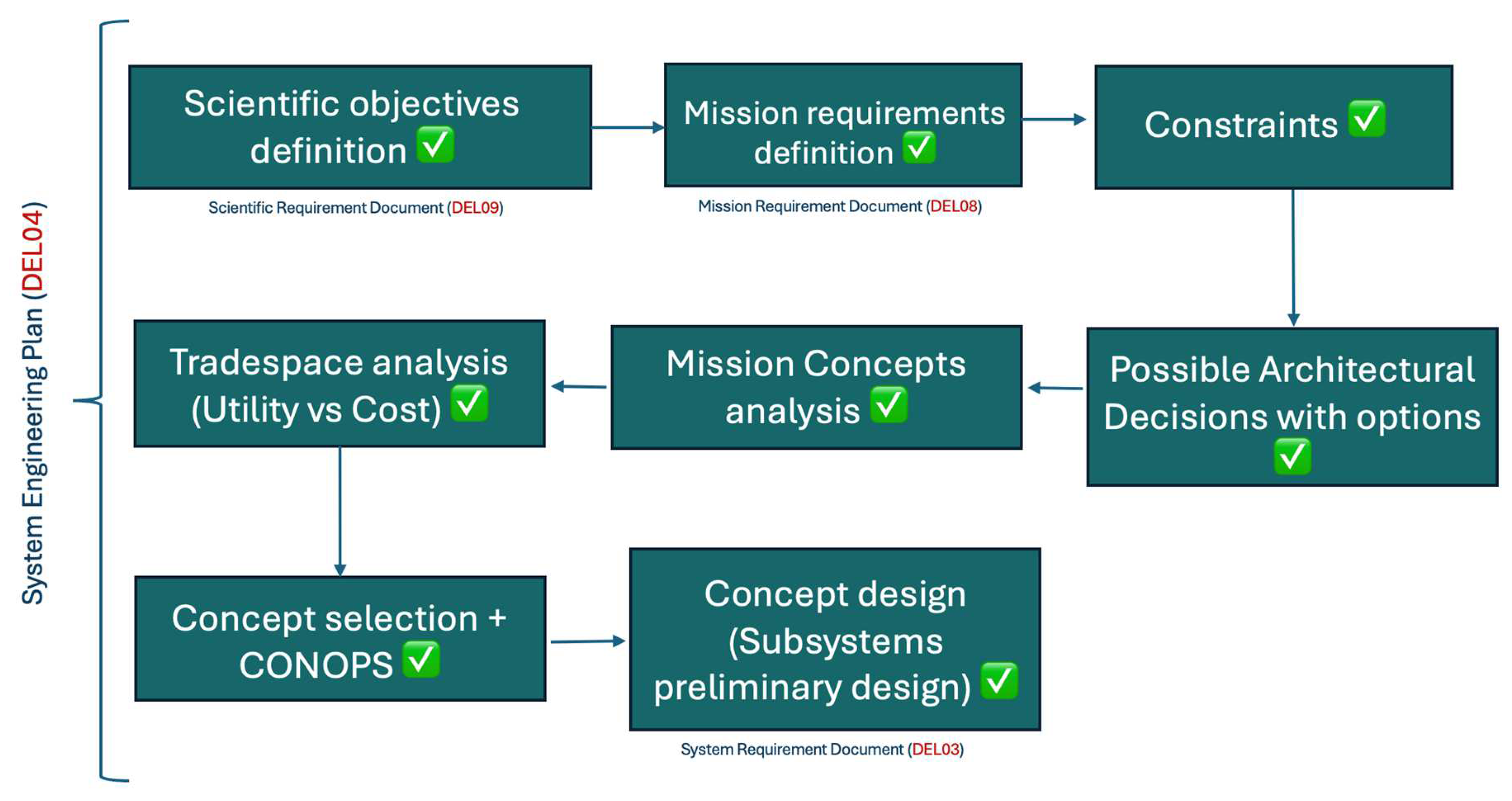
3. System Engineering Process and Model-Based Systems Engineering
3.1. System Engineering Inputs
- Scientific Requirements: Detailed scientific objectives set to guide the development of a payload, enabling the exploration of the effects of microgravity and radiation on microbial biofilms, which lead the overall mission goals. They were summed up in Section 1, Section 2.1 and Section 2.2.
- Mission Profile Analysis: Operational parameters, such as orbit, timelines, and key mission phases analysis. These inputs come from the Mission Analysis work package, and the main results are presented in Section 2.3 and Section 2.4.
- Component Requirements: Specifications for critical components like the fluorescence microscope, propulsion systems, and lab-on-chip device, identified from ongoing or completed work in other specific work packages.
- Test Results: Data from preliminary tests, including biofilm behaviour under simulated conditions, radiation shielding effectiveness, and subsystem prototypes.
3.2. System Engineering Outputs
- System and Subsystem Specifications: Comprehensive documentation detailing the functionalities and integration details of all subsystems addressed in the specific deliverable.
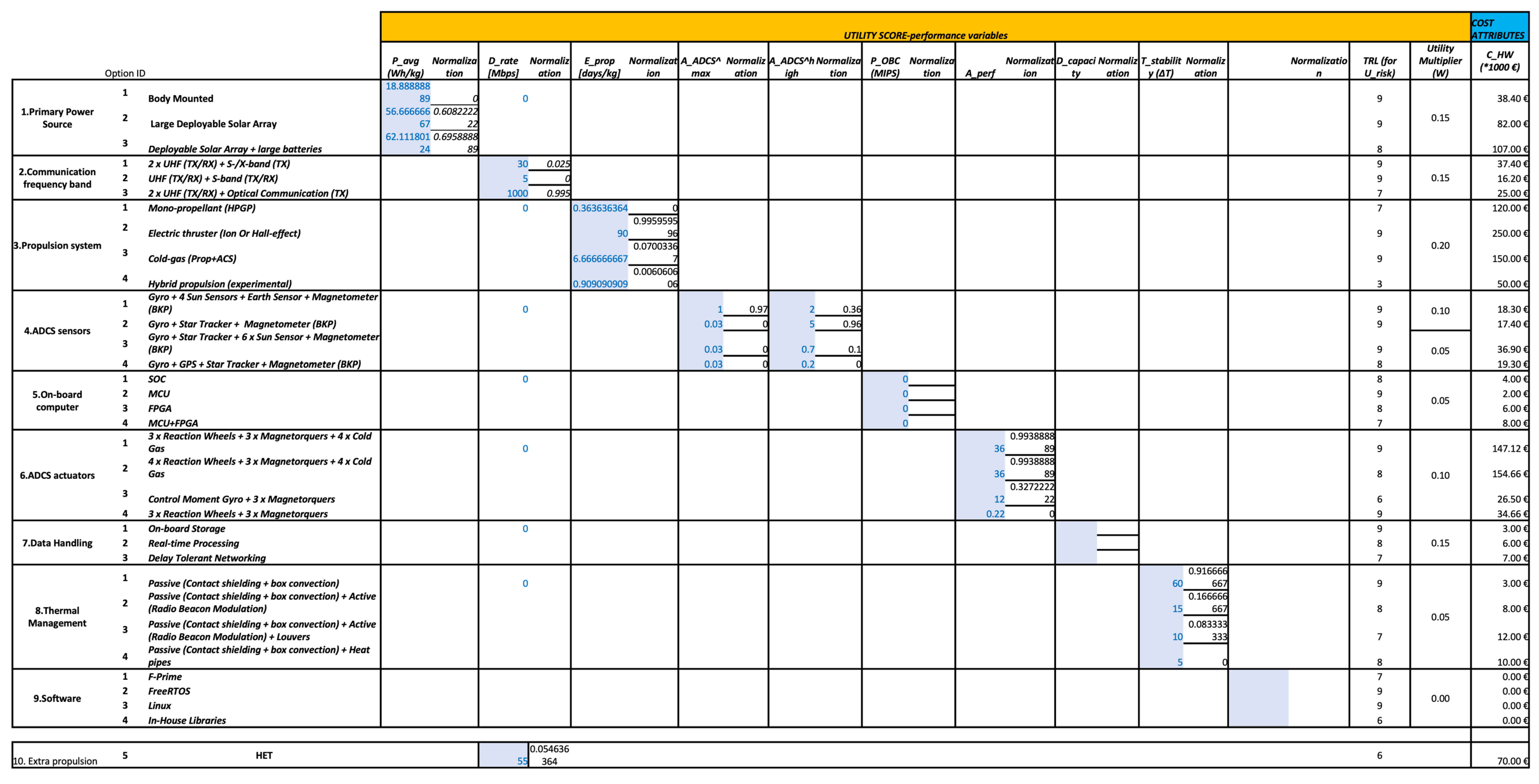
- Mission Concept Evaluation Model: A dedicated analytical model based on the definition of the principal architectural decisions (ADs) according to mission constraints, which will then be combined into different possible satellite configurations. The ADs represent multiple decision points across various subsystems, including primary power sources, communication bands, propulsion systems, and more, each with distinct options ranging from simple to complex setups. For each AD, specific performance variables were identified, and some equations were developed to model the utility and cost of each mission concept. These data have been used to construct a tradespace that visually represents the performance of various concepts, facilitating an informed decision on the baseline architecture. Additionally, the model incorporates some reference 6U CubeSat architectures that are missions already launched, allowing for their performance evaluation within the developed framework and establishing a benchmark for comparing BOREALIS mission concepts. A sensitivity analysis has also been performed to quantify the impact of uncertainties on the parameters on the model outputs. This has also been complemented by a Monte Carlo simulation that incorporated stochastic elements into the input data, enhancing the model reliability by capturing the inherent variability and ensuring robust mission planning. This dual-methodology approach can substantiate the model foundation, allowing for robust, data-driven decisions, which optimize the mission architecture for both performance and cost.
- Integrated Design Model (IDM): Once the mission concept baseline is chosen, a dynamic model hosted within Valispace environment [47] that integrates all subsystems will be developed, facilitating real-time updates and collaborative design efforts across different teams. It will be developed first in a simplified version in Excel, and all the collected data will be used as an input to the Valispace model to track all the mission data and requirements, providing extra technical analysis for requirements, components budgets and data, system development tracking, and more.
- Development and Verification Plans: Strategic documents that outline the procedures for system validation against the mission requirements and operational readiness checks.
3.3. Model-Based Systems Engineering
4. BOREALIS 6U CubeSat Design and Development Using MBSE
4.1. Identifying System Constraints and Requirements
4.2. Mission Concepts Generation
- AD1 (electric power system) has been selected to guarantee a suitable power/energy budget to the power system (i.e., electric thrusters show a significantly larger power/energy budget compared to monopropellant ones).
- Concepts that include low-thrust propulsion systems have redundant transceivers, in order not to reduce the reliability of the AD2 (telecommunication system) possibly undermined by long mission times (and radiation exposure).
- Concepts that include high-thrust propulsion systems have AD6 (ADCS actuators) that can provide a larger control torque, to be capable of compensating for the large parasite torque eventually generated by the thruster if misaligned.
- Concepts that include electric propulsion systems, introducing high thermal loads, have more effective AD8 (thermal control systems).
4.3. Development of the BOREALIS System Model
WOBC × POBC + Wdata × Dcapacity + Wactuators × Aperf − Wthermal × Tstability) − Urisk
- Uscience: Base utility from scientific objectives (vote for the scientific value of that specific configuration of the s/c; the value is from 0 to 1 and the ratio is that some configurations may not guarantee the achievement of all the scientific objectives; in the BOREALIS case, all the Uscience is considered 1 since the 10 mission architectures can fulfill all the scientific objectives).
- Wpower, Wcomm, Wprop, WADCS high, WADCS max, Wcomp, Wactuators, Wdata, Wthermal: Assigned weight of the respective variable; each parameter of the equation is assigned a weight to indicate its relative importance to mission performance. These weights have been determined based on mission requirements and engineering constraints [Annex B]. For example, propulsion (Wprop) has a higher weight because it directly impacts the orbital transfer and mission duration, which are critical for achieving the scientific goals. Similarly, power (Wpower) is weighted significantly due to the high energy demands of the payload and subsystems.
- Pavg: Average power generated (Wh/kg); power generation determines the energy availability for operations, including payload experiments, propulsion, communication, and data processing. A higher Pavg ensures system longevity and reduces risks of mission failure due to power shortages, especially during critical phases like orbital transfer.
- Drate: Data transmission rate (considering average for UHF/VHF, S-band, X-band, Optical); the capability to transmit scientific and operational data efficiently is crucial for mission success. This parameter considers the average data rate for UHF/VHF, S-band, X-band, and Optical communication. A higher Drate ensures that the payload data can be sent back to Earth without excessive delays, which is important for real-time monitoring of biofilm behavior.
- Eprop: Effectiveness of the propulsion system (transfer time * mass system); this metric quantifies the efficiency of the propulsion system in executing the orbital transfer. It accounts for both propellant consumption and transfer duration, impacting mission timeline and overall feasibility considering CubeSat constraints.
- AADCS max: ADCS accuracy (considering gyroscope and sensor options); the satellite requires precise pointing capabilities. This parameter evaluates how well the ADCS system (e.g., star trackers, gyros, magnetometers) maintains stability for attitude-dependent manoeuvres.
- AADCS high: ADCS accuracy at high angular rate (considering gyroscope and sensor options); the satellite requires precise pointing capabilities, and this parameter evaluates it at high angular rates.
- POBC: On-board computer processing power (considering SOC, MCU, FPGA); the OBC determines the ability to process and store scientific and housekeeping data efficiently. Higher processing power is critical for autonomous operations, reducing reliance on ground intervention and enabling real-time adjustments to mission conditions.
- Aperformance: Slew rate (max angular velocity managed) for each type of actuator selected; this parameter evaluates the actuators’ ability to reorient the CubeSat, which is crucial for precise targeting and orbital transfer manoeuvres.
- Dcapacity: Data handling capacity (on-board storage, real-time processing, cloud, delay-tolerant); given that CubeSats have limited access to ground stations, on-board data handling is crucial for storing and processing experiments locally before transmission. A higher Dcapacity supports larger datasets and more efficient operations, reducing the risk of data loss or latency issues.
- Tstability: Thermal stability (ΔT considering passive vs. active systems); the parameter assesses temperature fluctuations between passive (radiators, shielding) and active (heaters, thermal coatings) control methods. A more stable thermal system enhances robustness by preventing overheating or extreme cooling failures, which could compromise biofilm viability and payload functionality.
- Urisk: Based on average Technology Readiness Level (TRL). This accounts for the uncertainty and potential failure rates associated with integrating new technologies. Concepts using lower-TRL components (e.g., novel hybrid propulsion or untested payload subsystems) incur a higher risk factor.
- CHW: Development costs, including design, testing, and assembly of the CubeSat.
- Cdevelopment: HW development costs; it has been considered from a minimum of 1.2 to maximum of 2 × CHW in accordance with the TRL and development needed for the specific AD options of that configuration (for example, for Concept 1 and 2, it has been considered with the maximum value of 2 since these concepts employ a novel hybrid propulsor for CubeSat that would mean extensive study and tests).
- Claunch: Launch costs associated with securing a launch opportunity and integration with the launch vehicle (considered 0 for all the concepts since the launch cost for BOREALIS mission will not change with different AD combinations).
- Coperations: Operations costs for mission operations, including ground stations and data handling; it has been considered 10% of CHW).
- Crisk: Additional costs factored in for risks associated with unproven technologies or operational complexities; it has been considered in the range from 10% to 30% of the CHW.
4.4. Incorporation of Reference Architectures
- ArgoMoon: Developed for ESA Artemis 1 mission, ArgoMoon employs a hybrid propulsion system suitable for deep-space manoeuvres and a comprehensive suite of ADCS sensors, including star trackers and gyros, to maintain high-precision orientation. This satellite uses deployable solar arrays and larger batteries to compensate for reduced solar intensity in deep space. The mission robust data handling and thermal management systems provide critical points of reference for BOREALIS planned LEO and MEO operations, offering insights into the endurance of passive thermal control solutions and on-board storage capabilities in extended mission profiles [53].
- Mars Cube One (MarCO): Designed as a communications relay for NASA InSight mission, MarCO is equipped with large deployable solar arrays and cold-gas propulsion for course adjustments, aligning with BOREALIS requirements for flexible power and propulsion options. MarCO’s use of star trackers, sun sensors, and real-time data processing capabilities highlights effective subsystems for interplanetary missions. Its thermal management strategy, involving radiators and thermal blanketing, offers a precedent for active thermal control considerations relevant to BOREALIS orbital transitions and high-radiation environments [54].
- LICIACube: The LICIACube mission, which accompanied the NASA DART mission to test asteroid impact redirection, relies on a mono-propellant propulsion system for manoeuvrability. Equipped with a sophisticated ADCS suite to support high-precision imaging, LICIACube design prioritizes data handling and on-board storage for capturing and transmitting high-resolution images. Its deployable solar arrays and thermal management system provide examples of subsystem choices that can be adapted for BOREALIS high-altitude radiation exposure and energy requirements [55].
- Lunar Flashlight: As a mission to detect water ice on the lunar surface, Lunar Flashlight combines large deployable solar arrays with a mono-propellant propulsion system to achieve sustained operations near the Moon. The CubeSat use of FPGA-based on-board computing and passive thermal control, supplemented by heat pipes, underscores a highly efficient configuration for handling the challenging thermal and radiation conditions expected for the BOREALIS MEO phase. Its reliance on on-board storage for data handling aligns with BOREALIS design for storing data before transmission, especially in high-radiation environments, where real-time data transfer may be limited [56].
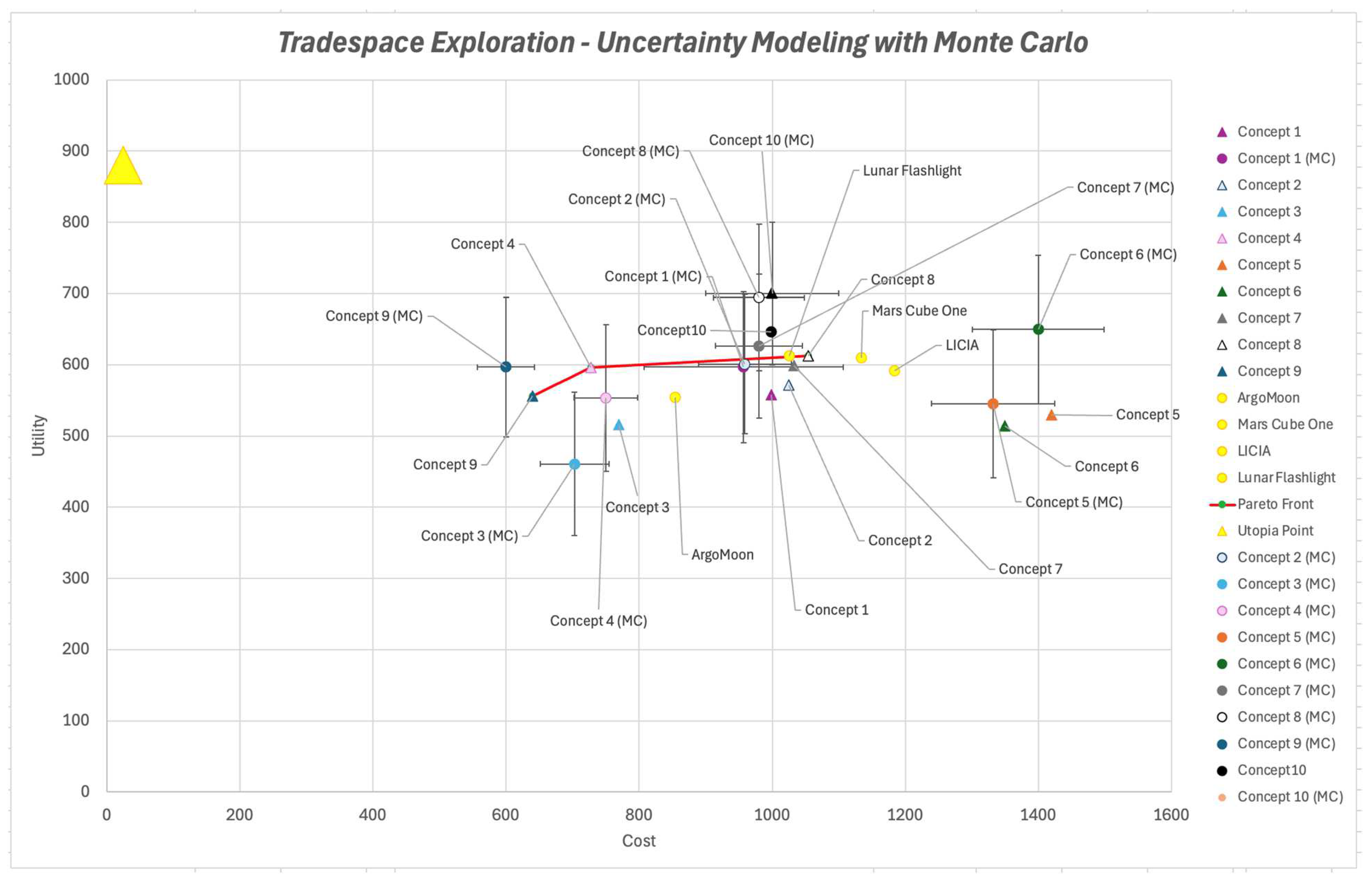
5. Tradespace Analysis and Optimization
5.1. Basic Tradespace
5.2. Enhancing Analysis with Monte Carlo Simulations
- Cost Variables: Log-normal distributions were applied to hardware development, risk, and launch costs, reflecting their asymmetric variability, while triangular distributions were used for operational costs, capturing bounded logistical constraints.
- Utility Variables: Normal distributions were applied to subsystem performance metrics, such as power generation, propulsion efficiency, and ADCS accuracy, assuming symmetric variability around nominal values.
5.3. Sensitivity Analysis
5.3.1. Methodology
- In the first graph set (Figure 6), sensitivity results were grouped by AD, evaluating how changes in a specific AD impacted the utility across all mission concepts.
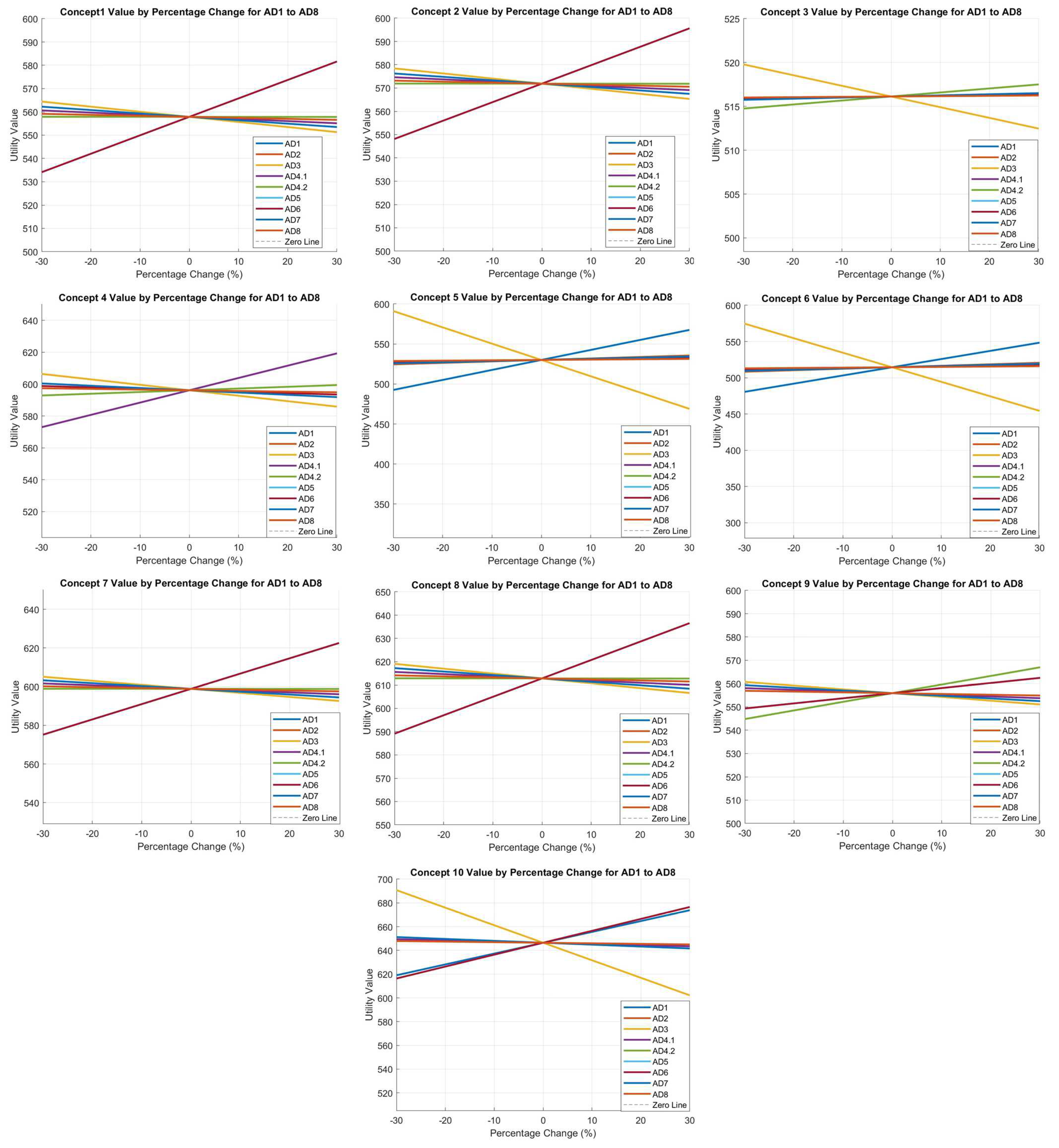
- In the second graph set (Figure 7), results were grouped by concept, illustrating how each concept utility responded to variations in all ADs.
5.3.2. Sensitivity Key Findings
- Criticality of ADs: Across all concepts, variations in propulsion performance (AD3) and power subsystem (AD1) had the most significant impact on utility. These ADs represent critical subsystems for achieving the BOREALIS mission scientific and operational objectives.
- Robustness of Concepts: Concepts 10 and 8, which were identified as Pareto-optimal in the tradespace analysis, showed minimal utility variation across all ADs and, even at their minimum, they still have higher utility with respect to the others.
- Nonlinear Impacts: Nonlinear utility trends were observed for several ADs. For example, in AD3 (propulsion), small improvements (+10%) for Concept 5 resulted in disproportionately large utility gains, reflecting a propulsion-limited design. Conversely, utility for some simpler configurations dropped dramatically with small performance reductions in propulsion and ADCS, indicating high dependency on these parameters.
- Parameter Prioritization: The analysis confirmed the dominance of AD1 (power subsystem) and AD3 (propulsion system) as the most impactful parameters across all concepts. This finding provides clear guidance for prioritizing engineering efforts and resource allocation to these critical subsystems.
5.4. Results Discussion
- Power Subsystem: Deployable solar arrays (AD1), providing enhanced power generation necessary for high-performance payload operations and propulsion requirements.
- Communication Subsystem: Dual UHF (TX/RX) and S-band (TX/RX) transceivers (AD2), ensuring reliable data transmission with flexibility for different mission phases.
- Propulsion Subsystem: Hall-effect thruster (HET) propulsion system (AD3), enabling efficient orbital transfer and supporting the complex mission profile.
- ADCS Subsystem: A comprehensive suite of gyroscopes, star trackers, and sun sensors (AD4), coupled with reaction wheels and magnetorquers for precise attitude control and stability in both LEO and MEO environments.
- Thermal Management: A combination of passive and active thermal management (AD8), ensuring temperature stability, which is critical for payload and electronic systems.
- Data Handling: On-board storage with real-time processing capability (AD7), allowing for effective data management and transmission during limited communication windows.
- On-Board Computer (OBC): A hybrid architecture using an MCU and FPGA (AD5), offering the computational flexibility required for payload operations and system management.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ABCS | AstroBio CubeSat |
| AD | Architectural Decisions |
| ADCS | Attitude Determination and Control Subsystem |
| ASI | Agenzia Spaziale Italiana |
| BOREALIS | Biofilm Onboard Radiation Exposure Assessment Lab In Space |
| CIRI | Centro Interdipartimentale di Ricerca Industriale Aerospaziale—UNIBO |
| COTS | Commercial off the shelf item |
| ECSS | European Cooperation for Space Standardization |
| ESA | European Space Agency |
| EPS | Electric Power System |
| GFP | Green Fluorescent Protein |
| GS | Ground Segment |
| H/W | Hardware |
| HET | Hall Effect Thruster |
| HPGP | High Performance Green Propulsion |
| IDM | Integrated Design Model |
| KI | Kayser Italia S.r.l. |
| LEO | Low Earth Orbit |
| MAU | Multi-Attribute Utility |
| MBSE | Model-Based Systems Engineering |
| MC | Monte Carlo |
| MEO | Medium Earth Orbit |
| MRD | Mission Requirement Document |
| NS | Non-shielded |
| OBC | On-Board Computer |
| S | Shielded |
| S/W | Software |
| SE | System Engineering |
| SIA | Scuola di Ingegneria Aerospaziale—Sapienza Università di Roma |
| SOC | System on Chip |
| SRD | System Requirements Document |
| TID | Total Ionizing Dose |
| TRL | Technology Readiness Level |
| TRR | Test Readiness Review |
| UNIBO | Università di Bologna |
Appendix A
 |
Appendix B. BOREALIS Mission, Scientific and System Requirements
- L0—Mission Goals
- L1—Scientific and System Requirements
References
- ISECG. Global Exploration Roadmap, 3rd ed.; ISECG: Illkirch-Graffenstaden, France, 2018; Available online: https://www.globalspaceexploration.org/wordpress/wp-content/isecg/GER_2018_small_mobile.pdf (accessed on 12 December 2024).
- Ricco, A.J.; Beasley, C.; Giovangrandi, L.; Henschke, M.; Kitts, C.; Levine, L.; Luzzi, E.; Ly, D.; Mas, I.; McIntyre, M.; et al. Autonomous Genetic Analysis System to Study Space Effects on Microorganisms: Results from Orbit. In Proceedings of the TRANSDUCERS 2007-2007 International Solid-State Sensors, Actuators and Microsystems Conference, Lyon, France, 10–14 June 2007; IEEE: Lyon, France, 2007; pp. 33–37. [Google Scholar]
- Ricco, A.J.; Parra, M.; Niesel, D.; Piccini, M.; Ly, D.; McGinnis, M.; Kudlicki, A.; Hines, J.W.; Timucin, L.; Beasley, C.; et al. PharmaSat: Microfluidics, BioMEMS, and Medical Microsystems IX. In Proceedings of the Microfluidics, BioMEMS, and Medical Microsystems IX, San Francisco, CA, USA, 14 February 2011. [Google Scholar] [CrossRef]
- Ricco, A.J.; Maria, S.R.S.; Hanel, R.P.; Bhattacharya, S. BioSentinel: A 6U Nanosatellite for Deep-Space Biological Science. IEEE Aerosp. Electron. Syst. Mag. 2020, 35, 6–18. [Google Scholar] [CrossRef]
- Padgen, M.R.; Liddell, L.C.; Bhardwaj, S.R.; Gentry, D.; Marina, D.; Parra, M.; Boone, T.; Tan, M.; Ellingson, L.; Rademacher, A.; et al. BioSentinel: A Biofluidic Nanosatellite Monitoring Microbial Growth and Activity in Deep Space. Astrobiology 2023, 23, 637–647. [Google Scholar] [CrossRef] [PubMed]
- Santa Maria, S.R.; Marina, D.B.; Massaro Tieze, S.; Liddell, L.C.; Bhattacharya, S. BioSentinel: Long-Term Saccharomyces Cerevisiae Preservation for a Deep Space Biosensor Mission. Astrobiology 2023, 23, 617–630. [Google Scholar] [CrossRef]
- Liddell, L.C.; Gentry, D.M.; Gilbert, R.; Marina, D.; Massaro Tieze, S.; Padgen, M.R.; Akiyama, K.; Keenan, K.; Bhattacharya, S.; Santa Maria, S.R. BioSentinel: Validating Sensitivity of Yeast Biosensors to Deep Space Relevant Radiation. Astrobiology 2023, 23, 648–656. [Google Scholar] [CrossRef] [PubMed]
- Flemming, H.-C.; Wingender, J.; Szewzyk, U.; Steinberg, P.; Rice, S.A.; Kjelleberg, S. Biofilms: An Emergent Form of Bacterial Life. Nat. Rev. Microbiol. 2016, 14, 563–575. [Google Scholar] [CrossRef]
- Park, J.; Salmi, M.L.; Wan Salim, W.W.A.; Rademacher, A.; Wickizer, B.; Schooley, A.; Benton, J.; Cantero, A.; Argote, P.F.; Ren, M.; et al. An Autonomous Lab on a Chip for Space Flight Calibration of Gravity-Induced Transcellular Calcium Polarization in Single-Cell Fern Spores. Lab Chip 2017, 17, 1095–1103. [Google Scholar] [CrossRef]
- Burklund, A.; Tadimety, A.; Nie, Y.; Hao, N.; Zhang, J.X.J. Advances in Diagnostic Microfluidics. In Advances in Clinical Chemistry; Elsevier: Amsterdam, The Netherlands, 2020; Volume 95, pp. 1–72. ISBN 9780128211656. [Google Scholar]
- Nascetti, A.; Mirasoli, M.; Marchegiani, E.; Zangheri, M.; Costantini, F.; Porchetta, A.; Iannascoli, L.; Lovecchio, N.; Caputo, D.; De Cesare, G.; et al. Integrated Chemiluminescence-Based Lab-on-Chip for Detection of Life Markers in Extraterrestrial Environments. Biosens. Bioelectron. 2019, 123, 195–203. [Google Scholar] [CrossRef] [PubMed]
- Martinez-Cisneros, C.; Da Rocha, Z.; Seabra, A.; Valdés, F.; Alonso-Chamarro, J. Highly Integrated Autonomous Lab-on-a-Chip Device for on-Line and in Situ Determination of Environmental Chemical Parameters. Lab Chip 2018, 18, 1884–1890. [Google Scholar] [CrossRef] [PubMed]
- Petrucci, G.; Caputo, D.; Lovecchio, N.; Costantini, F.; Legnini, I.; Bozzoni, I.; Nascetti, A.; De Cesare, G. Multifunctional System-on-Glass for Lab-on-Chip Applications. Biosens. Bioelectron. 2017, 93, 315–321. [Google Scholar] [CrossRef]
- Narayanamurthy, V.; Jeroish, Z.E.; Bhuvaneshwari, K.S.; Bayat, P.; Premkumar, R.; Samsuri, F.; Yusoff, M.M. Advances in Passively Driven Microfluidics and Lab-on-Chip Devices: A Comprehensive Literature Review and Patent Analysis. RSC Adv. 2020, 10, 11652–11680. [Google Scholar] [CrossRef]
- Akgönüllü, S.; Denizli, A. Molecular Imprinting-Based Sensors: Lab-on-Chip Integration and Biomedical Applications. J. Pharm. Biomed. Anal. 2023, 225, 115213. [Google Scholar] [CrossRef]
- Azizipour, N.; Avazpour, R.; Rosenzweig, D.H.; Sawan, M.; Ajji, A. Evolution of Biochip Technology: A Review from Lab-on-a-Chip to Organ-on-a-Chip. Micromachines 2020, 11, 599. [Google Scholar] [CrossRef]
- Gupta, S.; Ramesh, K.; Ahmed, S.; Kakkar, V. Lab-on-Chip Technology: A Review on Design Trends and Future Scope in Biomedical Applications. Int. J. Bio-Sci. Bio-Technol. 2016, 8, 311–322. [Google Scholar] [CrossRef]
- Sengupta, P.; Khanra, K.; Chowdhury, A.R.; Datta, P. Lab-on-a-Chip Sensing Devices for Biomedical Applications. In Bioelectronics and Medical Devices; Elsevier: Amsterdam, The Netherlands, 2019; pp. 47–95. ISBN 9780081024201. [Google Scholar]
- Maule, J.; Wainwright, N.; Steele, A.; Gunter, D.; Flores, G.; Effinger, M.; Danibm, N.; Wells, M.; Williams, S.; Morris, H.; et al. LOCAD-PTS: Operation of a New System for Microbial Monitoring Aboard the International Space Station (ISS). In Proceedings of the AIAA SPACE 2008 Conference & Exposition, San Diego, CA, USA, 9–11 September 2008. [Google Scholar]
- Castro-Wallace, S.L.; Chiu, C.Y.; John, K.K.; Stahl, S.E.; Rubins, K.H.; McIntyre, A.B.R.; Dworkin, J.P.; Lupisella, M.L.; Smith, D.J.; Botkin, D.J.; et al. Nanopore DNA Sequencing and Genome Assembly on the International Space Station. Sci. Rep. 2017, 7, 18022. [Google Scholar] [CrossRef]
- Stahl-Rommel, S.; Jain, M.; Nguyen, H.N.; Arnold, R.R.; Aunon-Chancellor, S.M.; Sharp, G.M.; Castro, C.L.; John, K.K.; Juul, S.; Turner, D.J.; et al. Real-Time Culture-Independent Microbial Profiling Onboard the International Space Station Using Nanopore Sequencing. Genes 2021, 12, 106. [Google Scholar] [CrossRef]
- Roda, A.; Mirasoli, M.; Guardigli, M.; Zangheri, M.; Caliceti, C.; Calabria, D.; Simoni, P. Advanced biosensors for monitoring astronauts’ health during long-duration space missions. Biosens. Bioelectron. 2018, 111, 18–26. [Google Scholar] [CrossRef]
- Zangheri, M.; Mirasoli, M.; Guardigli, M.; Di Nardo, F.; Anfossi, L.; Baggiani, C.; Simoni, P.; Benassai, M.; Roda, A. Chemiluminescence-based biosensor for monitoring astronauts’ health status during space missions: Results from the International Space Station. Biosens. Bioelectron. 2019, 129, 260–268. [Google Scholar] [CrossRef]
- Calabria, D.; Trozzi, I.; Lazzarini, E.; Pace, A.; Zangheri, M.; Iannascoli, L.; Maipan Davis, N.; Gosikere Matadha, S.S.; Baratto De Albuquerque, T.; Pirrotta, S.; et al. AstroBio-CubeSat: A Lab-in-Space for Chemiluminescence-Based Astrobiology Experiments. Biosens. Bioelectron. 2023, 226, 115110. [Google Scholar] [CrossRef]
- Nascetti, A.; Carletta, S.; Schirone, L.; Caputo, D.; Lovecchio, N.; de Cesare, G.; Davis, N.M.; Albuquerque, T.B.D.; Granello, P.; Iannascoli, L.; et al. In-Orbit Characterization of a Lab-on-Chip Payload with Integrated Thin-Film Photosensors for Chemiluminescent Immunoassays Aboard the AstroBio CubeSat Mission. In Proceedings of the 2023 9th International Workshop on Advances in Sensors and Interfaces (IWASI), Monopoli (Bari), Italy, 8–9 June 2023; pp. 246–250. [Google Scholar]
- Corydon, T.J.; Schulz, H.; Richter, P.; Strauch, S.M.; Böhmer, M.; Ricciardi, D.A.; Wehland, M.; Krüger, M.; Erzinger, G.S.; Lebert, M.; et al. Current Knowledge about the Impact of Microgravity on Gene Regulation. Cells 2023, 12, 1043. [Google Scholar] [CrossRef]
- Senatore, G.; Mastroleo, F.; Leys, N.; Mauriello, G. Effect of Microgravity & Space Radiation on Microbes. Future Microbiol. 2018, 13, 831–847. [Google Scholar] [CrossRef]
- Nadell, C.D.; Drescher, K.; Foster, K.R. Spatial Structure, Cooperation and Competition in Biofilms. Nat. Rev. Microbiol. 2016, 14, 589–600. [Google Scholar] [CrossRef]
- Micro-2 STS-132-NASA. Available online: https://www.nasa.gov/ames/space-biosciences/micro-2-sts-132/ (accessed on 10 January 2025).
- Micro-2A STS-135-NASA. Available online: https://www.nasa.gov/ames/space-biosciences/micro-2a-sts-135/ (accessed on 10 January 2025).
- McLean, R.J.; Cassanto, J.M.; Barnes, M.B.; Koo, J.H. Bacterial biofilm formation under microgravity conditions. FEMS Microbiol. Lett. 2001, 195, 115–119. [Google Scholar] [CrossRef]
- Pyle, B.H.; McFeters, G.A.; Broadaway, S.C.; Johnsrud, C.K.; Storga, R.T.; Borkowski, J. Bacterial Growth on surfaces and in suspensions. In Biorack on Spacehab- Biological Experiments on Three Shuttle-to-Mir Missions (A 00-30676 07-51); European Space Agency: Noordwijk, The Netherlands, 1999; Volume 1999, pp. 95–99. [Google Scholar]
- Crabbé, A.; Nielsen-Preiss, S.M.; Woolley, C.M.; Barrila, J.; Buchanan, K.; McCracken, J.; Inglis, D.O.; Searles, S.C.; Nelman-Gonzalez, M.A.; Ott, C.M.; et al. Spaceflight enhances cell aggregation and random budding in Candida albicans. PLoS ONE 2013, 8, e80677. [Google Scholar] [CrossRef]
- Kim, W.; Tengra, F.K.; Young, Z.; Shong, J.; Marchand, N.; Chan, H.K.; Pangule, R.C.; Parra, M.; Dordick, J.S.; Plawsky, J.L.; et al. Spaceflight Promotes Biofilm Formation by Pseudomonas aeruginosa. PLoS ONE 2013, 8, e62437. [Google Scholar] [CrossRef]
- Cottin, H.; Rettberg, P. EXPOSE-R2 on the International Space Station (2014–2016): Results from the PSS and BOSS Astrobiology Experiments. Astrobiology 2019, 19, 975–978. [Google Scholar] [CrossRef]
- Siems, K.; Müller, D.W.; Maertens, L.; Ahmed, A.; Van Houdt, R.; Mancinelli, R.L.; Baur, S.; Brix, K.; Kautenburger, R.; Caplin, N.; et al. Testing Laser-Structured Antimicrobial Surfaces Under Space Conditions: The Design of the ISS Experiment BIOFILMS. Front. Space Technol. 2022, 2, 773244. [Google Scholar] [CrossRef]
- Arianespace Group, Vega C User’s Manual, Is.0, Rev. 0, May 2018. Available online: https://ariane.group/app/uploads/sites/4/2024/10/Vega-C-users-manual-Issue-0-Revision-0-1.pdf (accessed on 15 March 2024).
- Arianespace Group, SSMS Vega C User’s Manual, Is.1, Rev. 0, September 2020. Available online: https://ariane.group/app/uploads/sites/4/2024/10/SSMS-Vega-C-UsersManual-Issue-1-Rev0-Sept2020.pdf (accessed on 15 March 2024).
- Federal Communications Commission. Mitigation of Orbital Debris in the New Space Ag e (FCC 22-74). Fed. Regist. 2022, 47, 4742–4757. [Google Scholar]
- Burgio, N.; Carletta, S.; Santagata, A.; Tedde, T.; Nascetti, A.; Frullini, M.; Mirasoli, M.; Natalucci, S.; Albano, M.; Urban, D. Modelling the irradiation experiments of microbic films within the BOREALIS payload. In Proceedings of the 75th International Astronautical Congress, Milan, Italy, 14–18 October 2024. [Google Scholar]
- Szabo, J.; Robin, M.; Paintal, S.; Pote, B.; Hruby, V.; Freeman, C. Iodine Propellant Space Propulsion. In Proceedings of the 33rd International Electric Propulsion Conference, Washington, DC, USA, 6–10 October 2013. [Google Scholar]
- Burgio, N.; Cretara, L.; Corcione, M.; Frullini, M.; Iannascoli, L.; Nascetti, A.; Santagata, A.; Palmerini, G.; Quintino, A.; Brucato, J.R.; et al. Modelling the interaction of the Astro Bio Cube Sat with the Van Allen’s Belt radiative field using Monte Carlo transport codes. Radiat. Detect. Technol. Methods 2022, 6, 262–279. [Google Scholar] [CrossRef]
- Burgio, N.; Santagata, A.; Nascetti, A.; Carletta, S.; Brucato, J.R.; Corcione, M.; Frullini, M.; Iannascoli, L.; Impresario, G.; Meneghin, A.; et al. Comparison of the measured and simulated dose responses within the AstroBio CubeSat payload during its mission in the Van Allen Belt. Radiat. Detect. Technol. Methods 2025, 1–11. [Google Scholar] [CrossRef]
- Battistoni, G.; Boehlen, T.; Cerutti, F.; Chin, P.W.; Esposito, L.S.; Fasso, A.; Ferrari, A.; Lechner, A.; Empl, A.; Mairani, A. “Overview of the FLUKA code”. Ann. Nucl. Energy 2015, 82, 10–18. [Google Scholar] [CrossRef]
- The Space Environment Information System–SPENVIS. Available online: https://www.spenvis.oma.be/ (accessed on 3 September 2024).
- International Radiation Environment Near Earth. Available online: https://www.vdl.afrl.af.mil/programs/ae9ap9/ (accessed on 14 February 2024).
- Valispace. Available online: https://www.valispace.com (accessed on 10 January 2025).
- Crawley, E.F.; Cameron, B.; Selva, D. System Architecture: Strategy and Product Development for Complex Systems; Always Learning; Global Edition; Pearson: Edinburgh, Scotland, 2016; ISBN 9781292110844. [Google Scholar]
- Ross, A.M.; Hastings, D.E.; Warmkessel, J.M.; Diller, N.P. Multi-Attribute Tradespace Exploration as Front End for Effective Space System Design. J. Spacecr. Rocket. 2004, 41, 20–28. [Google Scholar] [CrossRef]
- ESA MBSE Approach. Available online: https://www.esa.int/Enabling_Support/Preparing_for_the_Future/Discovery_and_Preparation/Model-based_system_engineering (accessed on 10 January 2025).
- Chhaniyara, S.; Saaj, C.M.; Maediger, B.; Althoff-Kotzias, M.; Ahrns, I. Model based system engineering for space robotics systems. In Proceedings of the Symposium on Advanced Space Technologies in Robotics and Automation, Noordwijk, The Netherlands, 12–14 April 2011. [Google Scholar]
- Wang, J.; Jing, F.; Xia, Y.; Xu, C. Study on Model-Based System Engineering in Satellite Layout. MATEC Web Conf. 2020, 316, 04001. [Google Scholar] [CrossRef]
- Lombardo, M.; Zannoni, M.; Gai, I.; Gomez Casajus, L.; Gramigna, E.; Manghi, R.L.; Tortora, P.; Di Tana, V.; Cotugno, B.; Simonetti, S.; et al. Design and Analysis of the Cis-Lunar Navigation for the ArgoMoon CubeSat Mission. Aerospace 2022, 9, 659. [Google Scholar] [CrossRef]
- Asmar, S.W.; Matousek, S. Mars Cube One (MarCO) Shifting the Paradigm in Relay Deep Space Operation. In Proceedings of the SpaceOps 2016 Conference, Daejeon, Republic of Korea, 16–20 May 2016; American Institute of Aeronautics and Astronautics: Daejeon, Republic of Korea, 2016. [Google Scholar]
- Dotto, E.; Della Corte, V.; Amoroso, M.; Bertini, I.; Brucato, J.R.; Capannolo, A.; Cotugno, B.; Cremonese, G.; Di Tana, V.; Gai, I.; et al. LICIACube-The Light Italian Cubesat for Imaging of Asteroids In Support of the NASA DART Mission towards Asteroid (65803). Didymos Planet. Space Sci. 2021, 199, 105185. [Google Scholar] [CrossRef]
- Cohen, B.A.; Hayne, P.O.; Greenhagen, B.; Paige, D.A.; Seybold, C.; Baker, J. Lunar Flashlight: Illuminating the Lunar South Pole. IEEE Aerosp. Electron. Syst. Mag. 2020, 35, 46–52. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Thrust | Specific Impulse | Max Cont. Firing Time |
|---|---|---|---|
| Monopropellant thruster | 1000 mN | 215 s | 600 s |
| Hall-effect thruster | 5 mN | 1000 s | 900 s |
| RF ion-thruster | 0.4 mN | 2200 s | 2500 s |
| Deployment Altitude | Transfer Time | Propellant Mass |
|---|---|---|
| 650 km | 1.4 days | 3.8 kg |
| 850 km | 1.2 days | 3.2 kg |
| 1050 km | 1.0 days | 2.8 kg |
| Deployment Altitude | Transfer Time | Propellant Mass |
|---|---|---|
| 650 km | 206 days | 1.0 kg |
| 850 km | 178 days | 0.8 kg |
| 1050 km | 148 days | 0.6 kg |
| Deployment Altitude | Transfer Time | Propellant Mass |
|---|---|---|
| 650 km | 823 days | 0.5 kg |
| 850 km | 695 days | 0.4 kg |
| 1050 km | 571 days | 0.3 kg |
| Altitude [km] | Shielded [Gy] | Not Shielded [Gy] |
|---|---|---|
| 1150 | 7.4 | 10.3 |
| 2050 | 37.3 | 62.8 |
| Dose Rate | 700 km | 1150 km | 2000 km |
|---|---|---|---|
| Dose Rate | 700 km | 1150 km | 2000 km |
|---|---|---|---|
| TID | 700 km | 1150 km | 2000 km |
|---|---|---|---|
| Monopropellant thruster | 2.2 Gy | 2.0 Gy | 1.8 Gy |
| Hall-effect thruster | 326 Gy | 299 Gy | 268 Gy |
| RT Ion-thruster | 1303 Gy | 1168 Gy | 1035 Gy |
| TID | 650 km | 850 km | 1050 km |
|---|---|---|---|
| Monopropellant thruster | 1.4 Gy | 1.3 Gy | 1.2 Gy |
| Hall-effect thruster | 208 Gy | 190 Gy | 171 Gy |
| RT Ion-thruster | 830 Gy | 742 Gy | 658 Gy |
| No. | Decision | Option 1 | Option 2 | Option 3 | Option 4 |
|---|---|---|---|---|---|
| AD1 | Electric Power System | Body Mounted Solar Array (2 × 6U + 2 × 3U) | Large Deployable Solar Array | Deployable Solar Array High-capacity Batteries | |
| AD2 | Telecommunication System | 2 × UHF (TX/RX) S-/X-band (TX) | UHF (TX/RX) + S-band (TX/RX) | 2 × UHF (TX/RX) Optical Communication (TX) | |
| AD3 | Propulsion System | Mono-propellant (HPGP) | Electric thruster (Ion or Hall-effect) | Cold-gas (Prop + ACS) | Experimental hybrid propulsion |
| AD4 | ADCS Sensors | Gyro 4 Sun Sensors Earth Sensor Magnetometer (BKP) | Gyro Star Tracker Magnetometer (BKP) | Gyro GPS 6 × Sun Sensor Magnetometer (BKP) | Gyro GPS Star Tracker Magnetometer (BKP) |
| AD5 | On-board Computer | SOC | MCU | FPGA | MCU + FPGA (Hybrid) |
| AD6 | ADCS Actuators | 3 × Reaction Wheels 3 × Magnetorquers 4 × Cold Gas | 4 × Reaction Wheels 3 × Magnetorquers 4 × Cold Gas | Control Moment Gyro 3 × Magnetorquers | 3 × Reaction Wheels 3 × Magnetorquers |
| AD7 | Data Handling | On-board Storage | Real-time Processing | Delay Tolerant Networking | |
| AD8 | Thermal Control System | Passive (Contact shielding and box convection) | Passive (Contact shielding and box convection) Active (Radio Beacon Modulation) | Passive (Contact shielding and box convection) Active (Radio Beacon Modulation) Louvers | Passive (Contact shielding and box convection) Heat pipes |
| AD9 | Software | F-Prime | FreeRTOS | Linux | In-house libraries |
| CONCEPT SELECTION | AD8 | Passive (Contact shielding + box convection) | Passive (Contact shielding + box convection) + Active (Radio Beacon Modulation) | Passive (Contact shielding + box convection) | Passive (Contact shielding + box convection) | Passive (Contact shielding + box convection) + Heat pipes | Passive (Contact shielding + box convection) + Active (Radio Beacon Modulation) + Louvers | Passive (Contact shielding + box convection) | Passive (Contact shielding + box convection) + Active (Radio Beacon Modulation) | Passive (Contact shielding + box convection) | Passive (Contact shielding + box convection) + Active (Radio Beacon Modulation) + Louvers |
| AD6 | 3 × Reaction Wheels + 3 × Magnetorquers + 4 × Cold Gas | 3 × Reaction Wheels + 3 × Magnetorquers + 4 × Cold Gas | 3 × Reaction Wheels + 3 × Magnetorquers | 3 × Reaction Wheels + 3 × Magnetorquers | 3 × Reaction Wheels + 3 × Magnetorquers | 3 × Reaction Wheels + 3 × Magnetorquers | 3 × Reaction Wheels + 3 × Magnetorquers + 4 × Cold Gas | 3 × Reaction Wheels + 3 × Magnetorquers | Control Moment Gyro + 3 × Magnetorquers | 3 × Reaction Wheels + 3 × Magnetorquers | |
| AD5 | MCU+FPGA (Hybrid) | MCU+FPGA (Hybrid) | MCU+FPGA (Hybrid) | MCU+FPGA (Hybrid) | SOC | SOC | SOC | SOC | SOC | SOC | |
| AD4 | Gyro + Star Tracker + 6 × Sun Sensor + Magnetometer (BKP) | Gyro + Star Tracker + 6 × Sun Sensor + Magnetometer (BKP) | Gyro + Star Tracker + 6 × Sun Sensor + Magnetometer (BKP) | Gyro + 4 Sun Sensors + Earth Sensor + Magnetometer (BKP) | Gyro + GPS + Star Tracker + Magnetometer (BKP) | Gyro + GPS + Star Tracker + Magnetometer (BKP) | Gyro + Star Tracker + 6 × Sun Sensor + Magnetometer (BKP) | Gyro + Star Tracker + 6 × Sun Sensor + Magnetometer (BKP) | Gyro + Star Tracker + Magnetometer (BKP) | Gyro + GPS + 3 × Sun Sensor + Magnetometer (BKP) | |
| AD3 | Hybrid propulsion (experimental) | Hybrid propulsion (experimental) | Cold-gas (Prop+ACS) | Cold-gas (Prop+ACS) | Electric thruster (Ion Or Hall-effect) | Electric thruster (Ion Or Hall-effect) | Mono-propellant (HPGP) | Mono-propellant (HPGP) | Mono-propellant (HPGP) | HET (Hall effect thrust) | |
| AD2 | UHF (TX/RX) + S-band (TX/RX) | UHF (TX/RX) + S-band (TX/RX) | UHF (TX/RX) + S-band (TX/RX) | UHF (TX/RX) + S-band (TX/RX) | 2 × UHF (TX/RX) + S-/X-band (TX) | 2 × UHF (TX/RX) + S-/X-band (TX) | UHF (TX/RX) + S-band (TX/RX) | UHF (TX/RX) + S-band (TX/RX) | UHF (TX/RX) + S-band (TX/RX) | UHF (TX/RX) + S-band (TX/RX) | |
| AD1 | Body Mounted Solar Array | Body Mounted Solar Array | Body Mounted Solar Array | Body Mounted Solar Array | Deployable Solar Array + Large Batteries | Large Deployable Solar Array | Body Mounted Solar Array | Body Mounted Solar Array | Body Mounted Solar Array | Deployable Solar Array | |
| Concept Name | Hybrid + OB Stor | Hybrid + RE Proc | ColdGas + H ADS | ColdGas + L ADS | EP 1 Capacity | EP 2 Power | HPGP + OB Stor | HPGP + RT Proc | HPGP + CMG | HET + RT Proc | |
| Concept ID | Concept1 | Concept2 | Concept3 | Concept4 | Concept5 | Concept6 | Concept7 | Concept8 | Concept9 | Concept10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nardi, L.; Carletta, S.; Abbasrezaee, P.; Palmerini, G.; Lovecchio, N.; Burgio, N.; Santagata, A.; Frullini, M.; Calabria, D.; Guardigli, M.; et al. Integrating Model-Based Systems Engineering into CubeSat Development: A Case Study of the BOREALIS Mission. Aerospace 2025, 12, 256. https://doi.org/10.3390/aerospace12030256
Nardi L, Carletta S, Abbasrezaee P, Palmerini G, Lovecchio N, Burgio N, Santagata A, Frullini M, Calabria D, Guardigli M, et al. Integrating Model-Based Systems Engineering into CubeSat Development: A Case Study of the BOREALIS Mission. Aerospace. 2025; 12(3):256. https://doi.org/10.3390/aerospace12030256
Chicago/Turabian StyleNardi, Lorenzo, Stefano Carletta, Parsa Abbasrezaee, Giovanni Palmerini, Nicola Lovecchio, Nunzio Burgio, Alfonso Santagata, Massimo Frullini, Donato Calabria, Massimo Guardigli, and et al. 2025. "Integrating Model-Based Systems Engineering into CubeSat Development: A Case Study of the BOREALIS Mission" Aerospace 12, no. 3: 256. https://doi.org/10.3390/aerospace12030256
APA StyleNardi, L., Carletta, S., Abbasrezaee, P., Palmerini, G., Lovecchio, N., Burgio, N., Santagata, A., Frullini, M., Calabria, D., Guardigli, M., Michelini, E., Calabretta, M. M., Zangheri, M., Lazzarini, E., Pace, A., Montalti, M., Mordini, D., Popova, L., Citraro, S., ... Nascetti, A. (2025). Integrating Model-Based Systems Engineering into CubeSat Development: A Case Study of the BOREALIS Mission. Aerospace, 12(3), 256. https://doi.org/10.3390/aerospace12030256