
Multibody Analysis of Lever-Spring Landing Gear with Elastomer Shock Absorbers: Modelling, Simulations and Drop Tests


Abstract
:1. Introduction
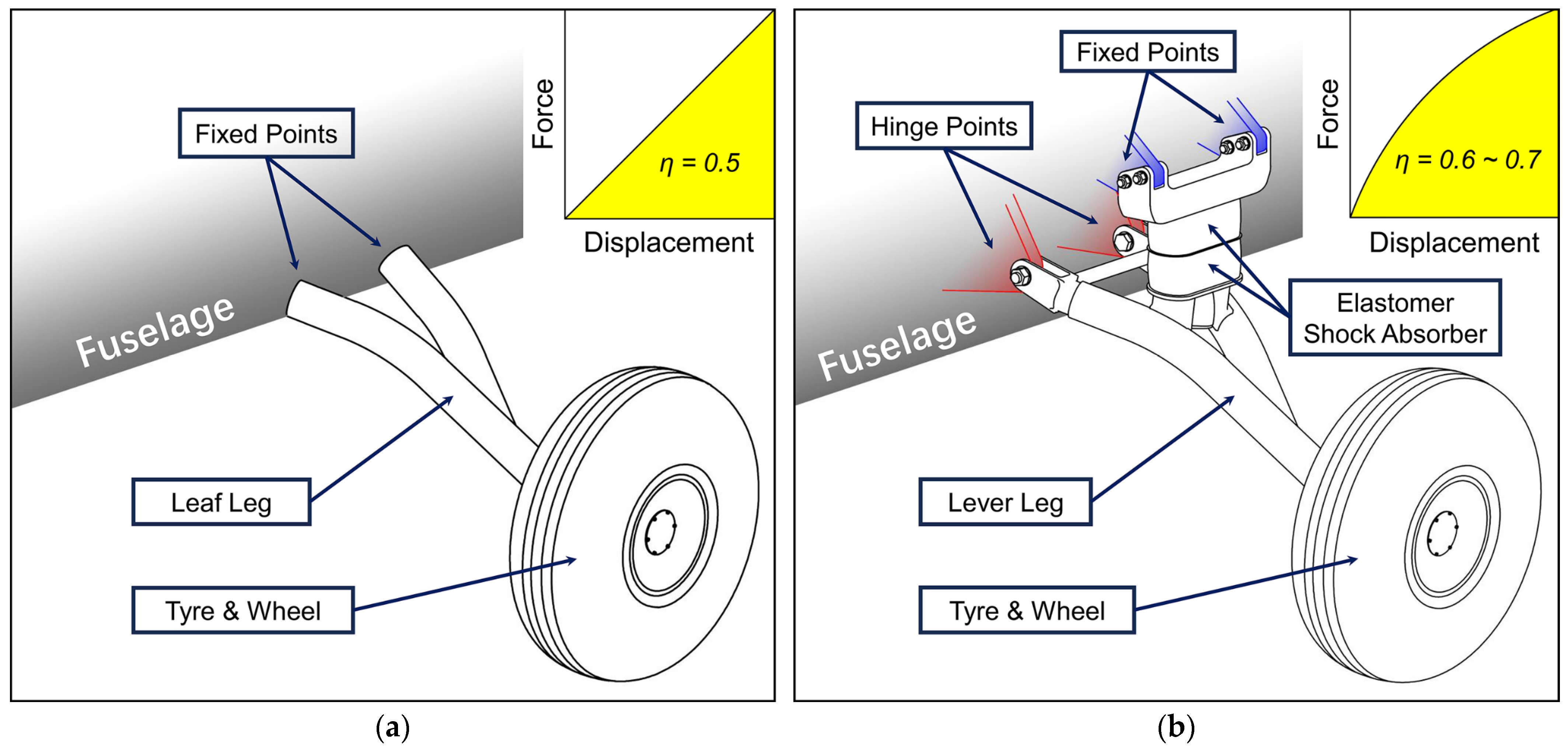
1.1. Lever-Spring Landing Gear
1.2. Modern Methods in Landing Gear Research
1.3. Research Objectives and Novelties
- A numerical dynamic model of the LSLG with ESA considering the uneven runway surface based on band-limited white noise (BLWN) was developed and simulated with MATLAB/Simulink R2024b;
- An FEA model of the LSLG was built, with detailed calibrations of the tyre and ESA, followed by MBDS to analyse stress distribution and parameter sensitivity;
- The LSLG with ESA was manufactured and tested on the LGDT rig, and the accuracies of a numerical dynamic model and the MBDS were validated and compared.
2. Numerical Modelling of Lever Spring Landing Gear
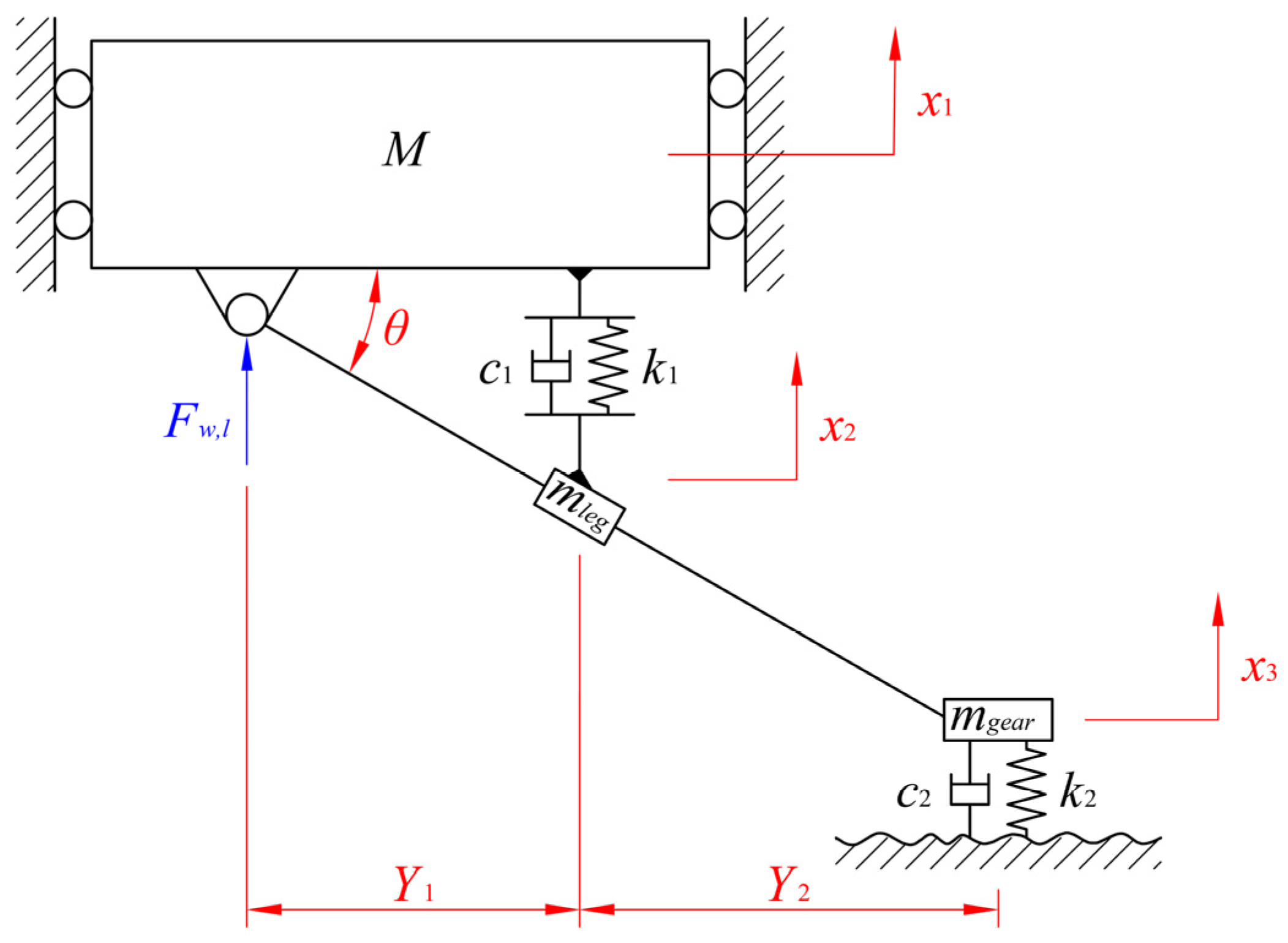
2.1. Dynamic Equations
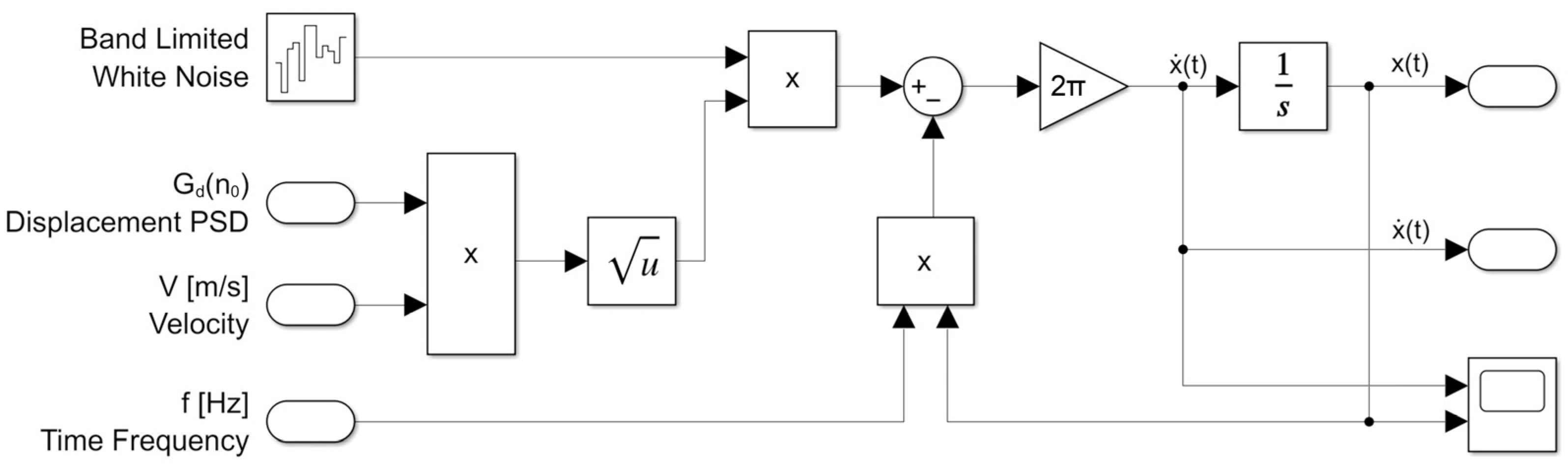
2.2. Modelling of Uneven Runway
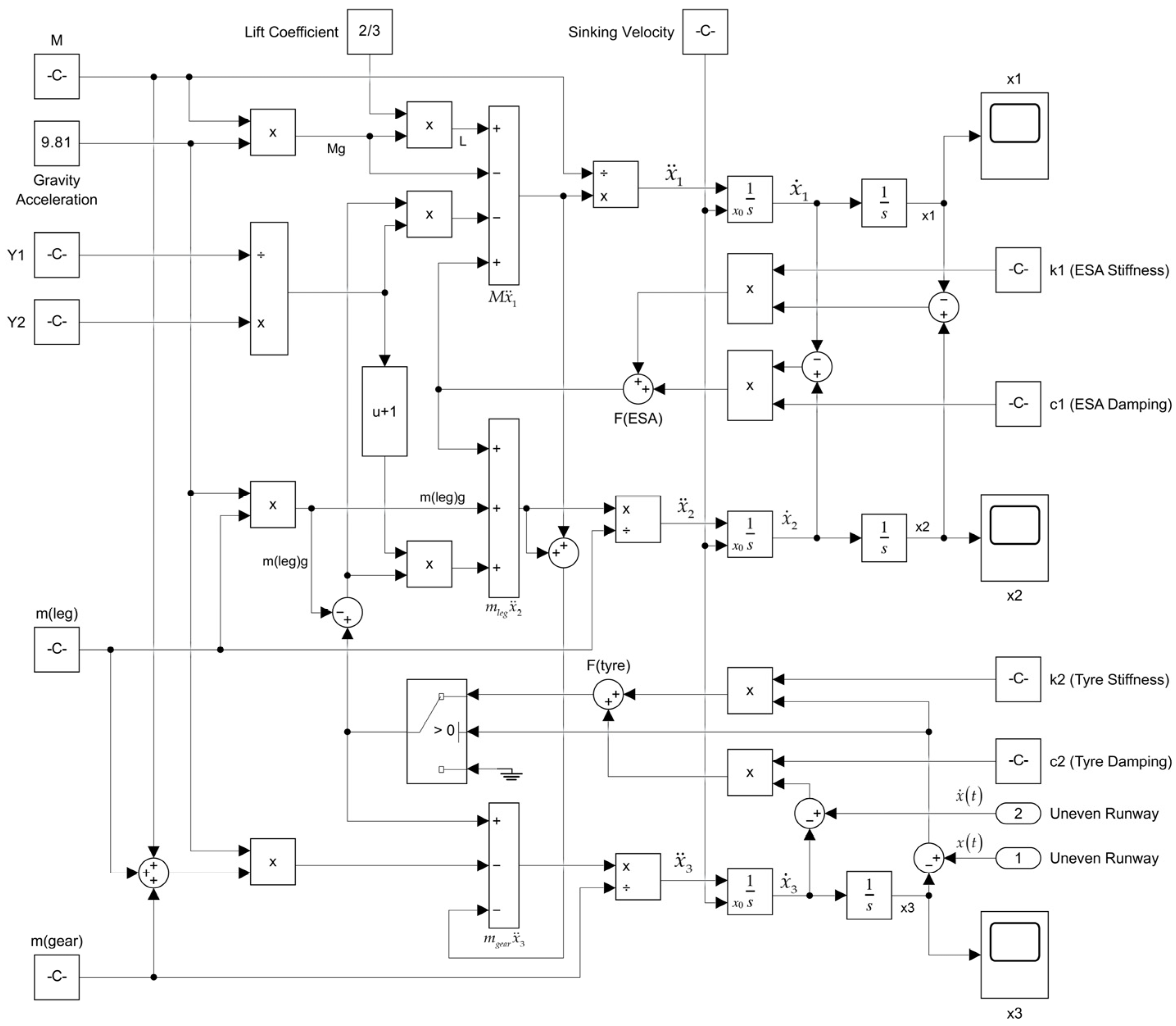
2.3. Simulink Model of LSLG
2.4. Results of Simulink Simulation
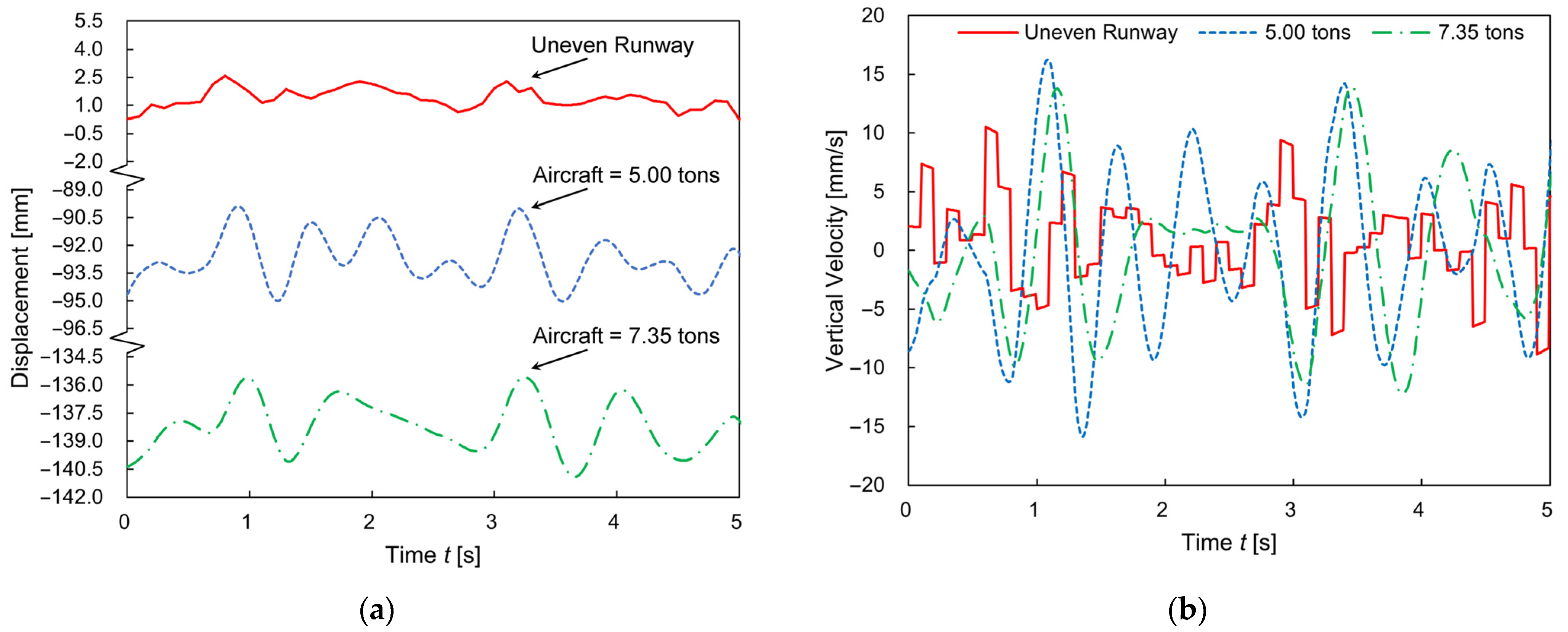
2.4.1. Taxiing at High Velocity
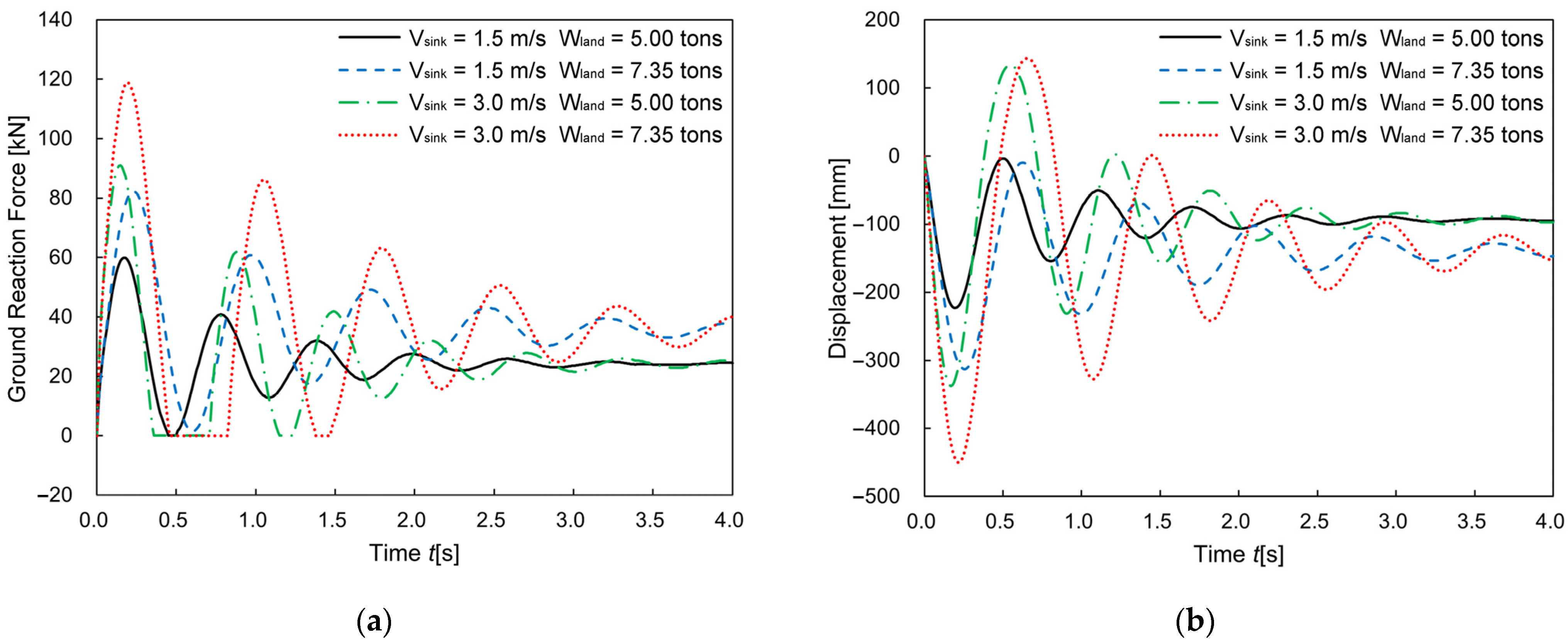
2.4.2. Landing Process
3. Multibody Dynamics Simulation of Landing Process
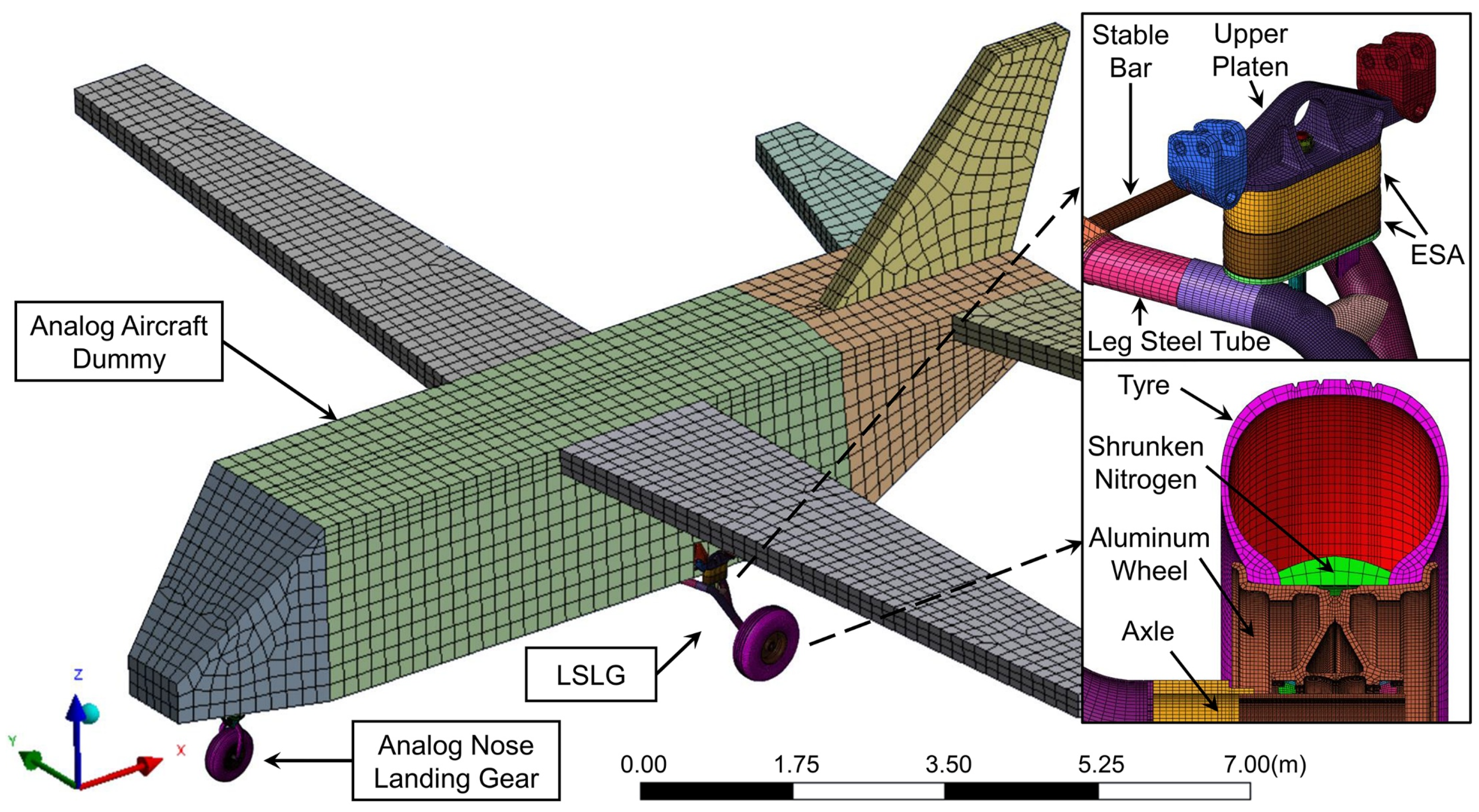
3.1. Structural Modelling and Meshing
3.2. Calibration of Elastic Components
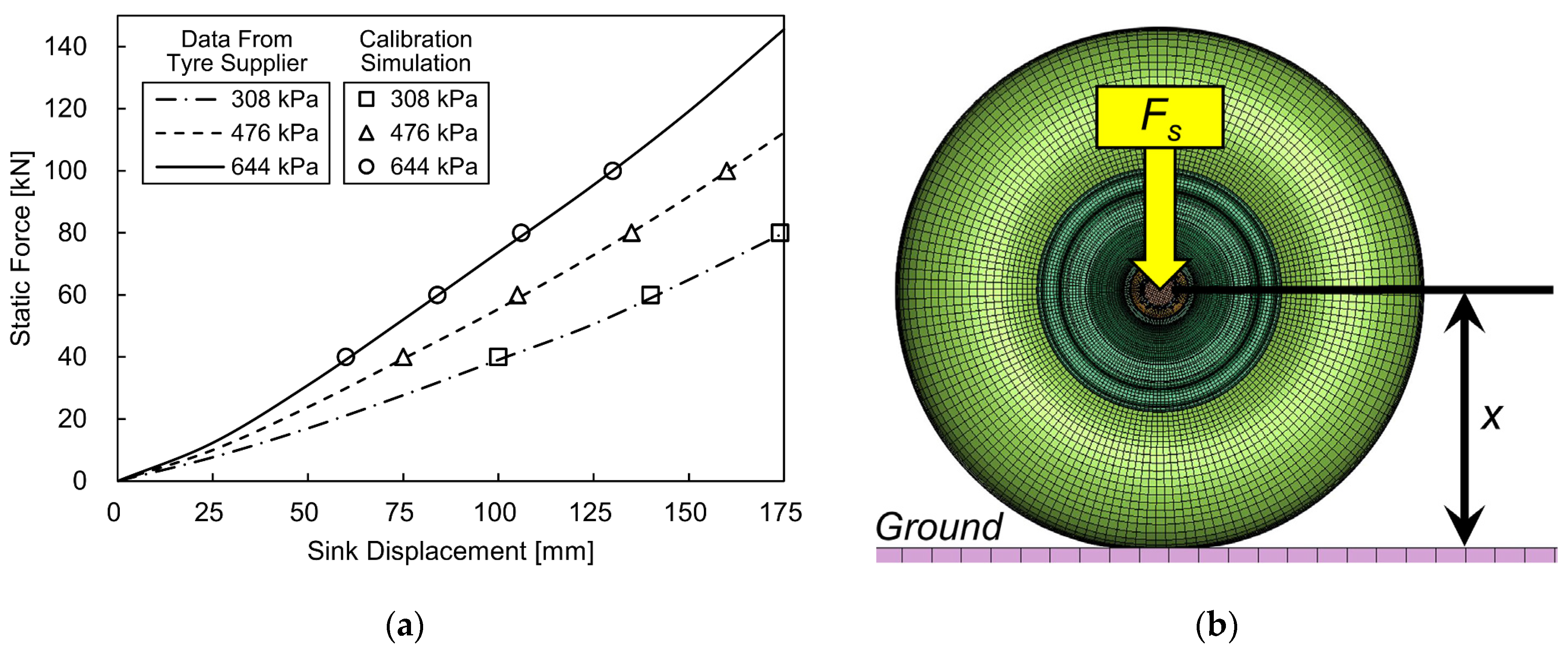
3.2.1. Tyre
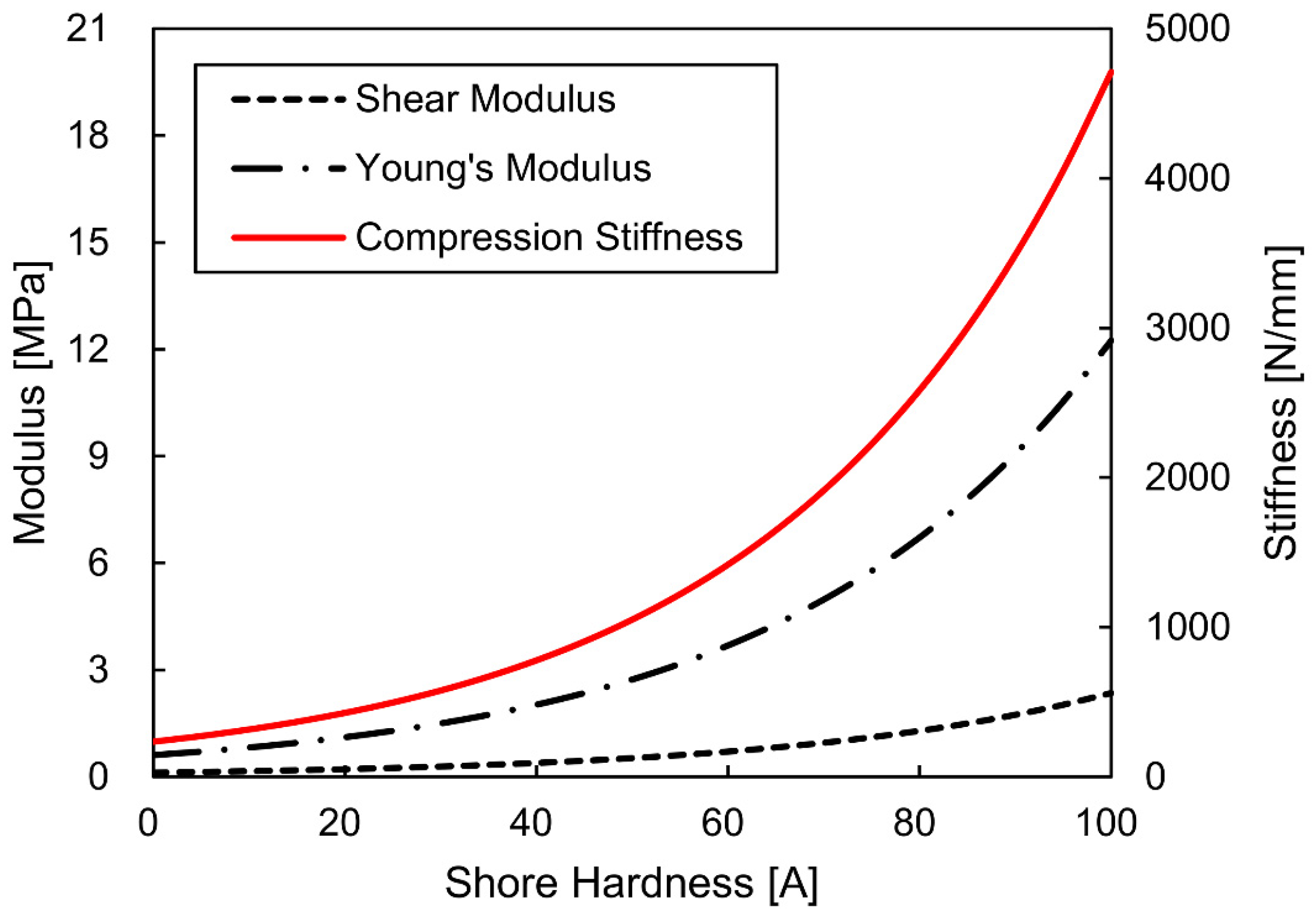
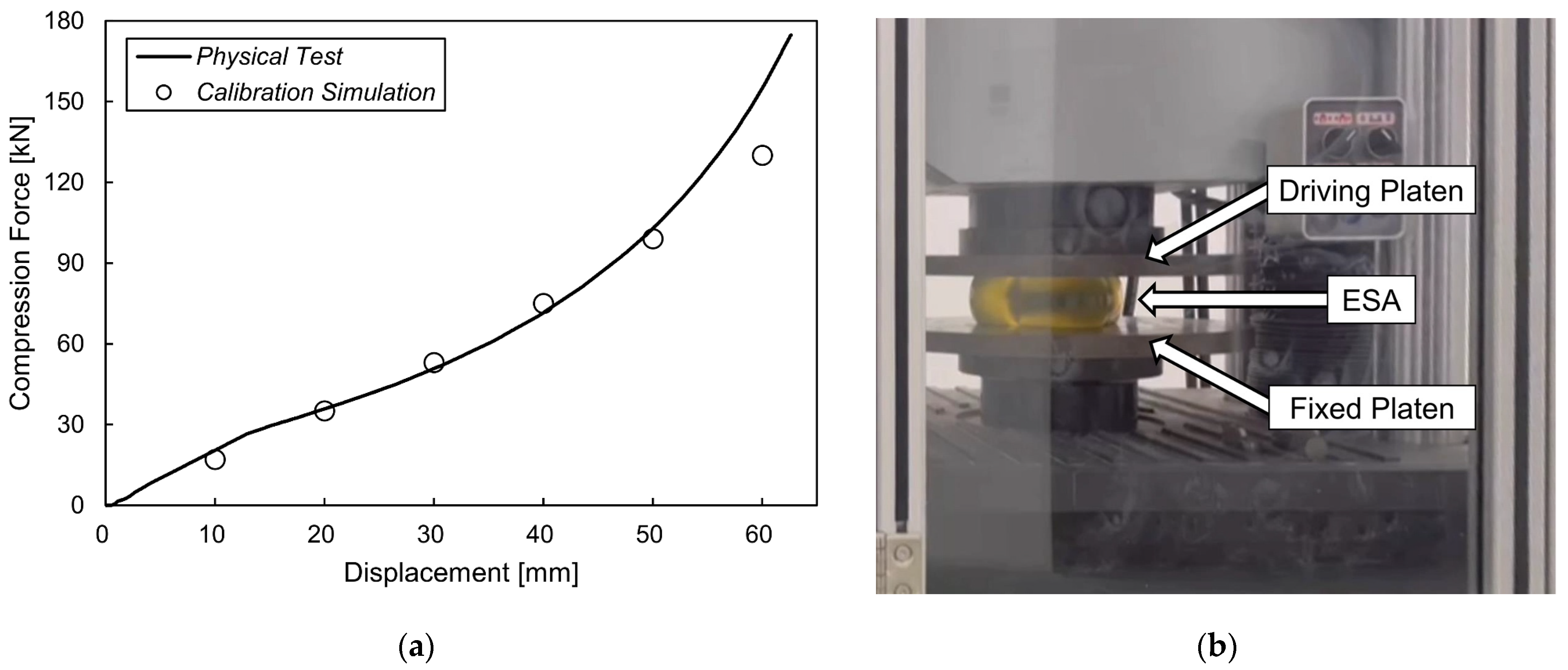
3.2.2. Elastomer Shock Absorber
 ). Based on the principle of cross-section equivalent, a and b are equivalent to the following:
). Based on the principle of cross-section equivalent, a and b are equivalent to the following:
3.3. Summary of Parameters Setting

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Categories | Item | Parameter/Select | Remarks |
|---|---|---|---|
| Gravity | Gravity acceleration | 9.8 m/s2 | |
| Gravity centre | 0.8 m before MLG 1.5 m beyond ground | ||
| Aircraft weight | 5.0~7.35 tons | Increase by 0.5 ton | |
| Average meshing size | Analog aircraft dummy | 100 mm | Shell elements |
| LSLG | 8 mm | Hexahedral elements | |
| Aircraft state | Sinking velocity | 0.5~3.0 m/s | Increase by 0.5 m/s |
| Initial angle of attack | 5 degrees | ||
| Tyre (Mooney–Rivlin 2) | Initial tyre pressure (Pt) | 450 kPa | See Section 3.2.1. |
| Shrunken N2 density (ρt) | 5.55 kg/m3 | ||
| Material density (ρtyre) | 1060 kg/m3 | ||
| Material constant C10 | 2.30 MPa | ||
| Material constant C01 | 0.58 MPa | ||
| Incompressibility D1 | 0 MPa−1 | ||
| ESA (Isotropic elasticity) | Shore hardness (HA) | 65 A | See Section 3.2.2. |
| Material density (ρESA) | 1230 kg/m3 | ||
| Shear modulus (G) | 0.822 MPa | ||
| Young’s modulus (EC) | 4.284 MPa | ||
| Compression stiffness (KC) | 1648 N/mm | ||
| Metallic components | Leg steel tube | 40CrNiMo (4340) | Refer to [40,41] for material properties |
| All bearings | GCr15 (E52100) | ||
| Fuselage connector | 35CrMoA (4135) | ||
| Fasteners, sleeves, mandril | 30CrMnSiA (4130) | ||
| Wheel rim | AlMg1SiCu (AA6061) | ||
| Upper/Lower platens | AlZn5.5MgCu (AA7075) | ||
| Other | Friction coefficient | 0.8 | Only between ground and tyre |
3.4. Results of MBDS
3.4.1. Stress Generated on Structures
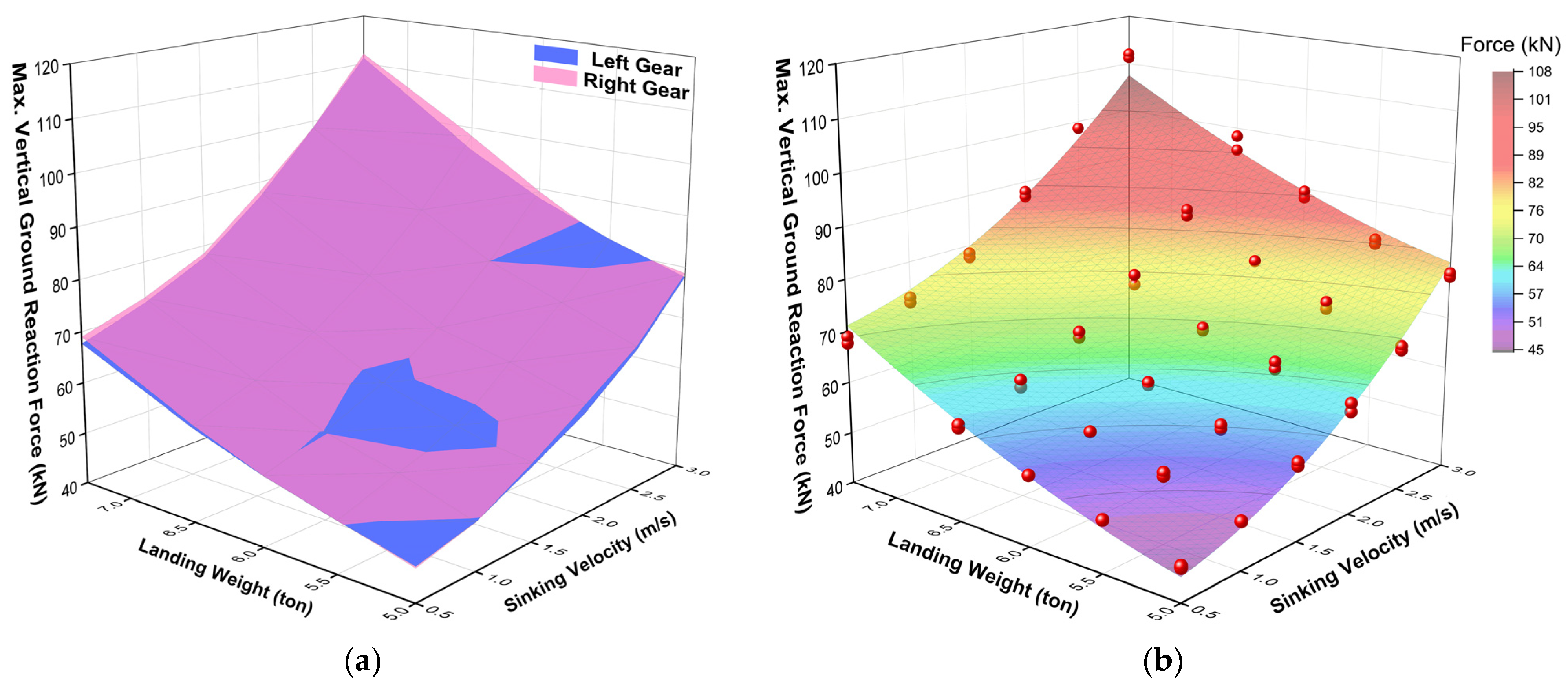
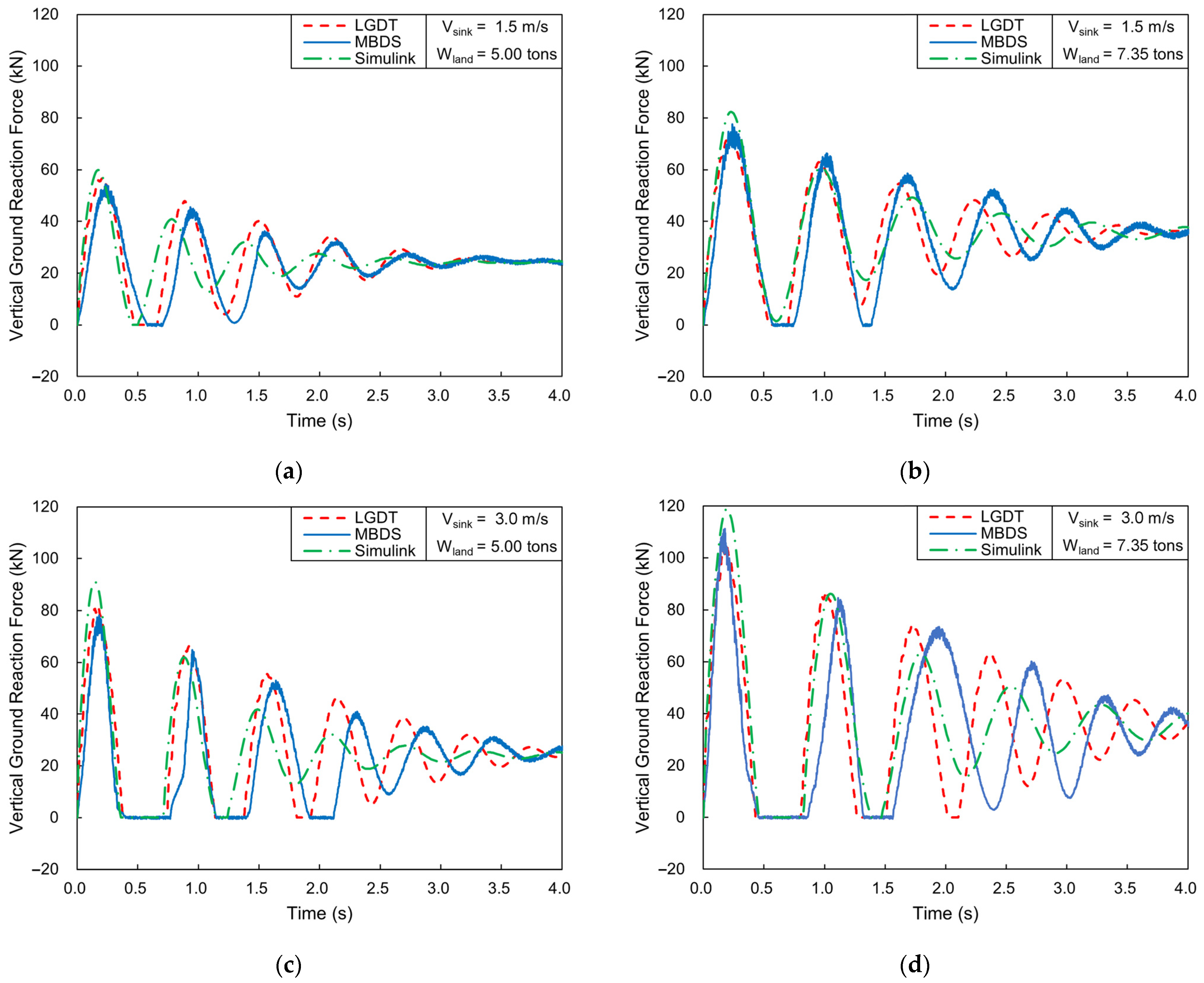
3.4.2. Vertical Ground Reaction Force
4. Landing Gear Drop Test
4.1. Establishment of LGDT Rig
4.2. Calculation and Settings of Parameters
4.3. Implementing Steps
- Assembling the LSLG with ESA under the basket;
- Adding counterweights above the basket to achieve the effective weight of the drop body;
- Lifting the drop body to the predetermined release height;
- Releasing the drop body, meanwhile collecting the objective data through the sensors;
- Checking carefully if the structures of the LSLG have any damage or abnormal deformation.
4.4. Results of LGDT
5. Limitations and Conclusions
5.1. Limitations
5.1.1. Elastic Materials
5.1.2. Landing Conditions
5.2. Conclusions
- A numerical dynamic model of the LSLG with ESA considering the uneven runway surface effect was established and verified with MATLAB/Simulink.
- The high-fidelity virtual FEA model of the LSLG and the aircraft dummy were built, with tyre and ESA calibrations to ensure the credibility of modelling. The vertical ground reaction forces and the stresses on the LGDT across landing conditions were analysed using multibody dynamics simulation (MBDS), showing the feasibility and safety of the physical landing gear drop test (LGDT).
- The sensitivities of key parameters were analysed. Results showed that the overload coefficient is only related to the sinking velocity and is unrelated to the aircraft landing weight. The influence of weight on the peak force attenuation rate increases significantly at higher sinking velocity.
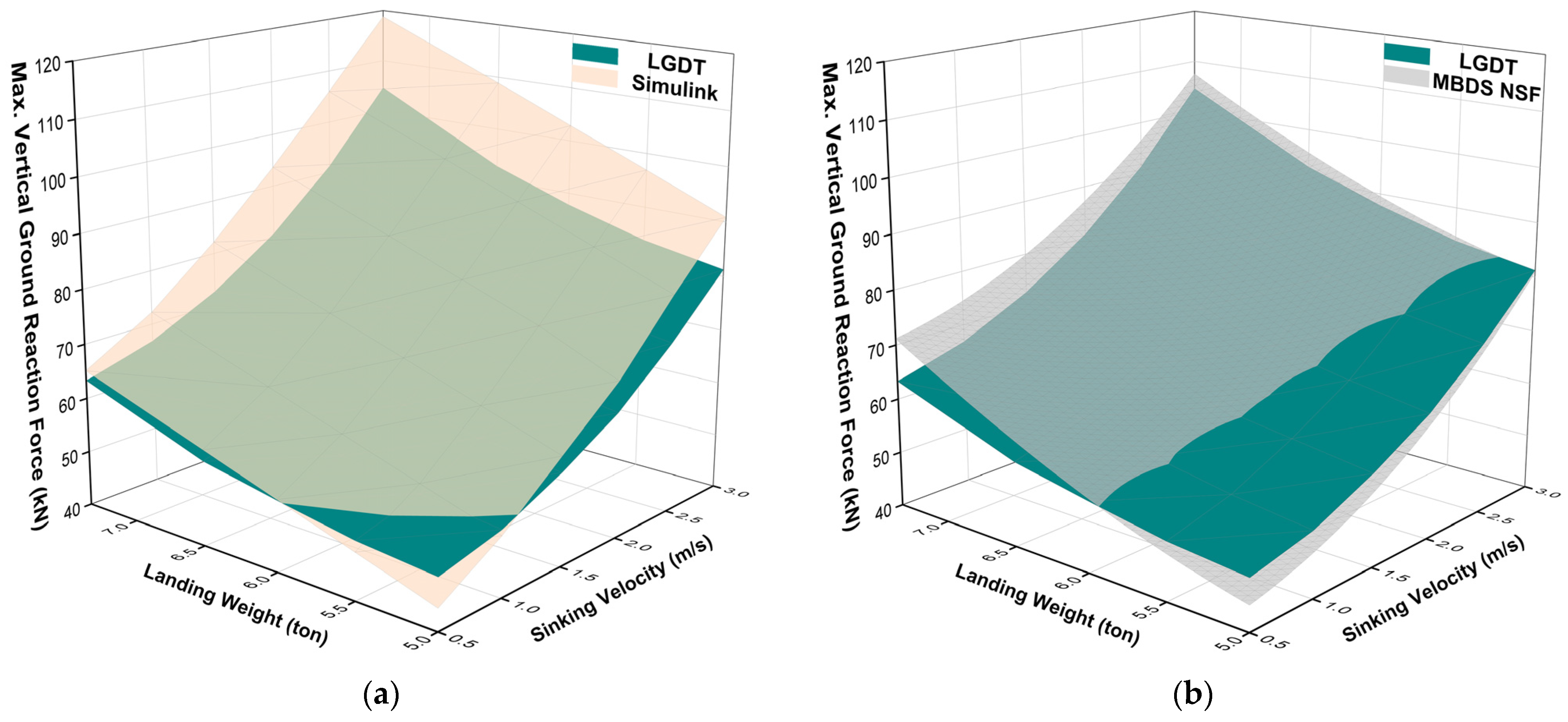
- MBDS-derived maximum ground reaction forces under different landing conditions were fitted with a nonlinear surface function (NSF), providing real-time prediction capability.
- The maximum vertical ground reaction force obtained from MBDS-NSF and numerical dynamic simulation were compared with the experimental results. The result of the numerical model simulation is slightly larger than the experimental value, and the maximum error is 13.6%. The oscillation frequency of the LGDT results is slightly larger than those of the MBDS results. The maximum error is 8.39%, and the average error is 1.72%, proving the accuracy and reliability of the simulation.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CCAR | China Civil Aviation Regulation |
| BLWN | band-limited white noise |
| ESA | elastomer shock absorber |
| FAR | Federal Aviation Regulation (USA) |
| FEA | finite element analysis |
| GC | gravity centre |
| LGDT | landing gear drop test |
| LSLG | lever-spring landing gear |
| MBDS | multibody dynamics simulation |
| MRE | magnetorheological elastomer |
| NSF | nonlinear surface fitting |
| OPSA | oleo-pneumatic shock absorber |
| SSSP | solid spring shock absorber |
| UAV | unmanned aerial vehicle |
References
- Guida, M.; Marulo, F.; Abrate, S. Advances in crash dynamics for aircraft safety. Prog. Aerosp. Sci. 2018, 98, 106–123. [Google Scholar] [CrossRef]
- Jiang, Y.; Feng, G.; Liu, P.; Yuan, L.; Ding, J.; Jiang, B. Evaluation of Joint Clearance Effects on the Shimmy of Nose Landing Gear. Aerospace 2023, 10, 722. [Google Scholar] [CrossRef]
- Liu, J.; Tan, Y. Safety evaluation of the power system of electric vertical take-off and landing vehicles with different configurations. J. Harbin Eng. Univ. 2024, 45, 339–348. [Google Scholar] [CrossRef]
- Raouf, I.; Kumar, P.; Cheon, Y.; Tanveer, M.; Jo, S.; Kim, H.S. Advances in Prognostics and Health Management for Aircraft Landing Gear—Progress, Challenges, and Future Possibilities. Int. J. Precis. Eng. Manuf.–Green Technol. 2024, 12, 301–320. [Google Scholar] [CrossRef]
- Silva, P.A.S.F.; Al-Shabab, S.A.A.; Tsoutsanis, P.; Skote, M. Study of Orifice Design on Oleo-Pneumatic Shock Absorber. Fluids 2024, 9, 108. [Google Scholar] [CrossRef]
- Yan, S.; Xue, P.; Liu, L.; Zahran, M.S. Optimization of landing gear under consideration of vibration comfort for civil aircraft. Aircr. Eng. Aerosp. Technol. 2024, 96, 378–386. [Google Scholar] [CrossRef]
- Wishwakarma, S.N.; Telore, K.K.; Purandare, V.V.; Waichal, G.C.; Pagar, P.K.R. Optimization of Landing Gear Mechanism using Generative Design. Int. J. Res. Appl. Sci. Eng. Technol. 2023, 11, 1931–1938. [Google Scholar] [CrossRef]
- Gudmundsson, S. Chapter 13: The Anatomy of the Landing Gear. In General Aviation Aircraft Design: Applied Methods and Procedures, 1st ed.; Butterworth-Heinemann; Elsevier: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Xue, Z.; Li, M.; Li, Y.; Jia, H. A Simplified Flexible Multibody Dynamics for a Main Landing Gear with Flexible Leaf Spring. Shock Vib. 2014, 2014, 1–10. [Google Scholar] [CrossRef]
- Li, D.; Fan, Z.; Zhang, Y.; Zang, J.; Yang, F. Optimum design and experiment of composite leaf spring landing gear for electric aircraft. Chin. J. Aeronaut. 2020, 33, 2649–2659. [Google Scholar] [CrossRef]
- Zhang, Y.; Tong, J.; Guo, Q.; Guo, J.; Liu, X.; Chen, L. Hierarchical multiscale analysis for 3D woven composite leaf spring landing gear. Thin Wall. Struct. 2023, 189, 110913. [Google Scholar] [CrossRef]
- Hidayat, D.; Lstiyanto, J.; Marta, A.; Hidayat, K.; Sumarsono, D.A. Effect of Rubber Damper Stiffness and Tire Pressure to Reduce Ground Reaction Load Factor on Main Landing Gear Using Multi-Body Simulation (MBS) Rigid Model. J. Teknol. Dirgant. 2019, 17, 123–128. [Google Scholar] [CrossRef]
- Mardiyanto, R.; Kuswidiastuti, D.; Hutagalung, R.J.; Aulia, A.F.; Nugroho, P.D. Bungee Cord-based Unmanned Aerial Vehicle (UAV) Launcher With Trajectory Prediction. Int. J. Innov. Comput. I 2024, 20, 1199–1214. [Google Scholar] [CrossRef]
- Müller, J.; Elhashash, M.; Gollnick, V. Electrical Launch Catapult and Landing Decelerator for Fixed-Wing Airborne Wind Energy Systems. Energies 2022, 15, 2502. [Google Scholar] [CrossRef]
- Gonca, V.; Shvab, J. Design of elastomeric shock absorbers with variable stiffness. J. Vibroeng. 2010, 12, 347–354. [Google Scholar]
- Ding, W.; Wang, L.; Chen, Z.; Ao, H.; Yan, H. An Adaptive Elastic Support Seat-Based Magnetorheological Elastomer for Human Body Vibration Reduction. Materials 2024, 17, 3330. [Google Scholar] [CrossRef]
- Xu, Z.; Wu, H.; Wang, Q.; Jiang, S.; Yi, L.; Wang, J. Study on movement mechanism of magnetic particles in silicone rubber-based magnetorheological elastomers with viscosity change. J. Magn. Magn. Mater. 2020, 494, 165793. [Google Scholar] [CrossRef]
- Mann, V.; Dechwayukul, C.; Thongruang, W.; Srewaradachpisal, S.; Kaewpradit, P.; Kaew Apichai, W.; Bui, H. Design and Fabrication a Lightweight Spring Made of Natural Rubber for a Motorcycle’s Shock Absorber. Int. J. Automot. Mech. Eng. 2020, 17, 7758–7770. [Google Scholar] [CrossRef]
- Tiwari, V.; Sharma, S.C.; Harsha, S.P. Ride comfort analysis of high-speed rail vehicle using laminated rubber isolator based secondary suspension. Veh. Syst. Dyn. 2023, 61, 2689–2715. [Google Scholar] [CrossRef]
- Giagopoulos, D.; Arailopoulos, A.; Chatziparasidis, I. Optimal Modeling of an Elevator Chassis under Crash Scenario Based on Characterization and Validation of the Hyperelastic Material of Its Shock Absorber System. Appl. Mech. 2022, 3, 227–243. [Google Scholar] [CrossRef]
- Mustashin, M.S.; Rahmani, M.; Behdinan, K. Experimental characterization of a novel nose landing gear shimmy damper using a small-scale test rig. Aerosp. Sci. Technol. 2021, 112, 106625. [Google Scholar] [CrossRef]
- Zhu, X.; Wu, Y.; Yang, Y.; Pang, Y.; Ling, H.; Zhang, D. Real-time risk assessment of aircraft landing based on finite element-virtual prototype-machine learning co-simulation on wet runways. Int. J. Transp. Sci. Technol. 2024, 13, 77–79. [Google Scholar] [CrossRef]
- Fang, W.; Zhu, L.; Wang, Y. Landing Performance Study for Four Wheels Twin Tandem Landing Gear Based on Drop Test. Aerospace 2022, 9, 334. [Google Scholar] [CrossRef]
- Jinadu, A.; Olayemi, O.A.; Tijani, Q.; Salaudeen, A. Characterization of Boeing 777 Nose Landing Gear to Better Withstand Rough Landing. Int. J. Eng. Res. Afr. 2023, 66, 75–90. [Google Scholar] [CrossRef]
- Kang, B.; Jo, B.; Kim, B.; Hwang, J.; Choi, S. Linear and Nonlinear Models for Drop Simulation of an Aircraft Landing Gear System with MR Dampers. Actuators 2023, 12, 287. [Google Scholar] [CrossRef]
- Correia, D.; Ferreira, A. Aircrafts On-Ground Dynamics Models and Simulation Software: State-of-the-Art. Sustainability 2021, 13, 9147. [Google Scholar] [CrossRef]
- Pagani, A.; Augello, R.; Governale, G.; Viglietti, A. Drop Test Simulations of Composite Leaf Spring Landing Gears. Aerotec. Missili Spaz. 2019, 98, 63–74. [Google Scholar] [CrossRef]
- Liu, W.; Wang, Y. Improved Multi-Body Dynamic Simulation of Landing Gear Drop Test Incorporating Structural Flexibility and Bearing Contact. Aerospace 2024, 11, 543. [Google Scholar] [CrossRef]
- Pagani, A.; Azzara, R.; Augello, R.; Carrera, E. Multibody simulation and descent control of a space lander. Adv. Aircr. Spacecr. Sc. 2020, 7, 91–113. [Google Scholar] [CrossRef]
- Federal Aviation Administration. Airworthiness Standards: Normal Category Airplanes. In CFR Part 23; Federal Aviation Administration: Washington, DC, USA, 2024. [Google Scholar]
- Civil Aviation Administration of China. Airworthiness Standards: Normal Category Airplanes. In CCAR-23-R4, R4ed.; Civil Aviation Administration of China: Beijing, China, 2022. [Google Scholar]
- Federal Aviation Administration. Advisory Circular 25.491-1: Taxi, Takeoff and Landing Roll Design Loads; Federal Aviation Administration: Washington, DC, USA, 2000.
- ISO 8608:2016; Mechanical Vibration—Road Surface Profiles—Reporting of Measured Data. 2nd ed. International Organization for Standardization Publishing: Geneva, Switzerland, 2016.
- GBT 7031-2005; Mechanical Vibration—Road Surface Profiles—Reporting of Measured Data. The General Administration of Quality Supervision, Inspection and Quarantine of the People’s Republic of China: Beijing, China, 2005.
- Rapp, T.; Jacobs, G.; Berroth, J.; Guenther, J. Determining Dynamic Properties of Elastomer-Dampers by Means of Impact Testing. Exp. Mech. 2022, 62, 823–836. [Google Scholar] [CrossRef]
- Sokolska, J.; Ptak, A. Abrasive and Erosive Wear Behavior of Elastomeric Polyurethane Coatings: Effect of Grain Size. Coatings 2024, 14, 1611. [Google Scholar] [CrossRef]
- Yan, J.; Zhang, Z.; Man, J.; Sun, J.; Zhen, R.; Liu, X. Parameter Identification of the Mooney–Rivlin Model for Rubber Mounts Subject to Multiaxial Load. J. Vib. Eng. Technol. 2025, 13, 42. [Google Scholar] [CrossRef]
- Mizerski, K.A. The Equations of Hydrodynamics (Chapter 1). In Foundations of Convection with Density Stratification; Springer International Publishing AG: Cham, Switzerland, 2021; pp. 1–20. [Google Scholar]
- Cheng, D. Handbook of Mechanical Design (Book III), 6th ed.; Chemical Industry Press: Beijing, China, 2017; pp. 12–164. [Google Scholar]
- Cheng, D. Handbook of Mechanical Design (Book I), 6th ed.; Chemical Industry Press: Beijing, China, 2017; pp. 3–22. [Google Scholar]
- Federal Aviation Administration. Metallic Materials Properties Development and Standardization (MMPDS-05), 5th ed.; Federal Aviation Administration: Washington, DC, USA, 2010.




| Objects | Item/Symbol | Parameter/Select | Remarks |
|---|---|---|---|
| ESA | Stiffness/k1 | 1,648,000 N/m | See Section 3.2.2 |
| Damping/c1 | 1648 N·s/m | Temporarily | |
| Tyre | Stiffness/k2 | 693,900 N/m | From supplier |
| Damping/c2 | 7000 N·s/m | From supplier | |
| Sinking velocity | Sinking velocity/Vsink | −1.5 m/s | Normal landing condition |
| −3.0 m/s | Limited landing condition | ||
| Counterweight | Weight/M | 2400 kg | Correspond to minimum landing weight—5.00 tons |
| 3575 kg | Correspond to maximum landing weight—7.35 tons | ||
| Gear (wheel and tyre) | Weight/mgear | 66 kg | Physical measurement |
| Steel tube leg | Weight/mleg | 43 kg | Physical measurement |
| Dimension/Y1 | 0.401 m | ||
| Dimension/Y1 | 0.724 m |
| Specifications | Numerical Value | Units |
|---|---|---|
| Dimensions | 1.6 × 1.6 × 4.0 | m |
| Power of hoist | 10 | kW |
| Max. lifting weight of hoist | 5000 | kg |
| Mass per counterweight | 100 | kg |
| Max. range of force sensors | 100 | kN |
| Sampling frequency of force sensors | 2000 | Hz |
| Aircraft Weight (Ton) | 5.00 | 5.50 | 6.00 | 6.50 | 7.35 |
| Drop Body Weight (ton) | 2.50 | 2.75 | 3.00 | 3.25 | 3.68 |
| Sinking Velocity (m/s) | 0.5 | 1.0 | 1.5 | 2.0 | 2.5 | 3.0 |
| Release Height (mm) | 13 | 51 | 115 | 204 | 319 | 459 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; Zhu, J.; Zou, X.; Pan, Z.; Chen, J. Multibody Analysis of Lever-Spring Landing Gear with Elastomer Shock Absorbers: Modelling, Simulations and Drop Tests. Aerospace 2025, 12, 367. https://doi.org/10.3390/aerospace12050367
Li F, Zhu J, Zou X, Pan Z, Chen J. Multibody Analysis of Lever-Spring Landing Gear with Elastomer Shock Absorbers: Modelling, Simulations and Drop Tests. Aerospace. 2025; 12(5):367. https://doi.org/10.3390/aerospace12050367
Chicago/Turabian StyleLi, Fuyou, Jianxin Zhu, Xiangfu Zou, Zhongjian Pan, and Jian Chen. 2025. "Multibody Analysis of Lever-Spring Landing Gear with Elastomer Shock Absorbers: Modelling, Simulations and Drop Tests" Aerospace 12, no. 5: 367. https://doi.org/10.3390/aerospace12050367
APA StyleLi, F., Zhu, J., Zou, X., Pan, Z., & Chen, J. (2025). Multibody Analysis of Lever-Spring Landing Gear with Elastomer Shock Absorbers: Modelling, Simulations and Drop Tests. Aerospace, 12(5), 367. https://doi.org/10.3390/aerospace12050367