
Results of Long-Duration Simulation of Distant Retrograde Orbits

Abstract
:
1. Introduction
1.1. Overview
- there are likely additional stable conditions with motion out of the Earth–Moon orbital plane, and
- while the initial conditions are co-planar with the Earth–Moon orbital plane, it is unlikely that such conditions would produce motion that remains exclusively in that plane for the duration of the simulation.
1.2. Nature of Distant Retrograde Orbits (DROs)
- Moon is sufficiently large and sufficiently close to Earth that it is not possible to position a vehicle in an orbit sufficiently far from Earth that it appears to orbit Moon without lunar gravity having a significant effect on the vehicle.
- The dominating influence of solar gravity makes the simplification to a 3-body problem solution unrealistic. The gravitational field in the vicinity of our simulated vehicle is actually dominated by solar gravity, not terrestrial gravity. Further complicating the situation is the realization that this influence includes a a time-dependent direction, and a component out of the Earth–Moon plane that would otherwise define the Hill problem. At the very least, we have a 4-body problem.
- The perturbing effects of other celestial bodies, most notably Jupiter, impose additional time-dependent forces that further complicate the solution. These perturbations are also typically out of the Earth–Moon plane; while they are not expected to have significant effect, the computations are inexpensive so are included for completeness.
2. Results and Discussion
2.1. Stability of Resonant DROs
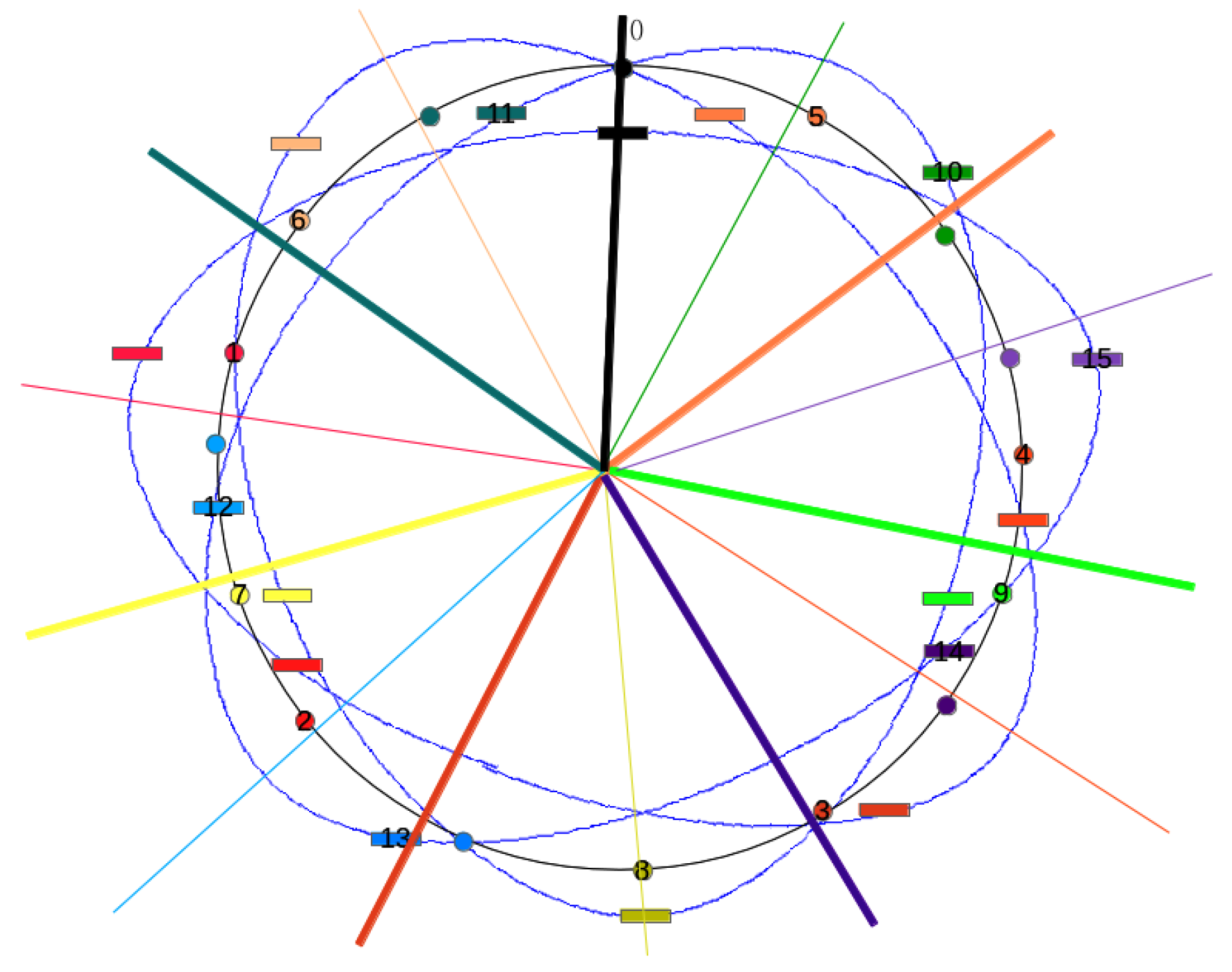
2.1.1. Overview of Resonances
- l, the number of times the vehicle moves around Earth in inertial space
- m, the number of times Moon moves around Earth in inertial space
- n, the number of times the vehicle moves around Moon in inertial space (the number of cycles through the Moon-centered inertial frame), and
- p, the number of times the vehicle moves around Moon in the Earth–Moon rotating frame.
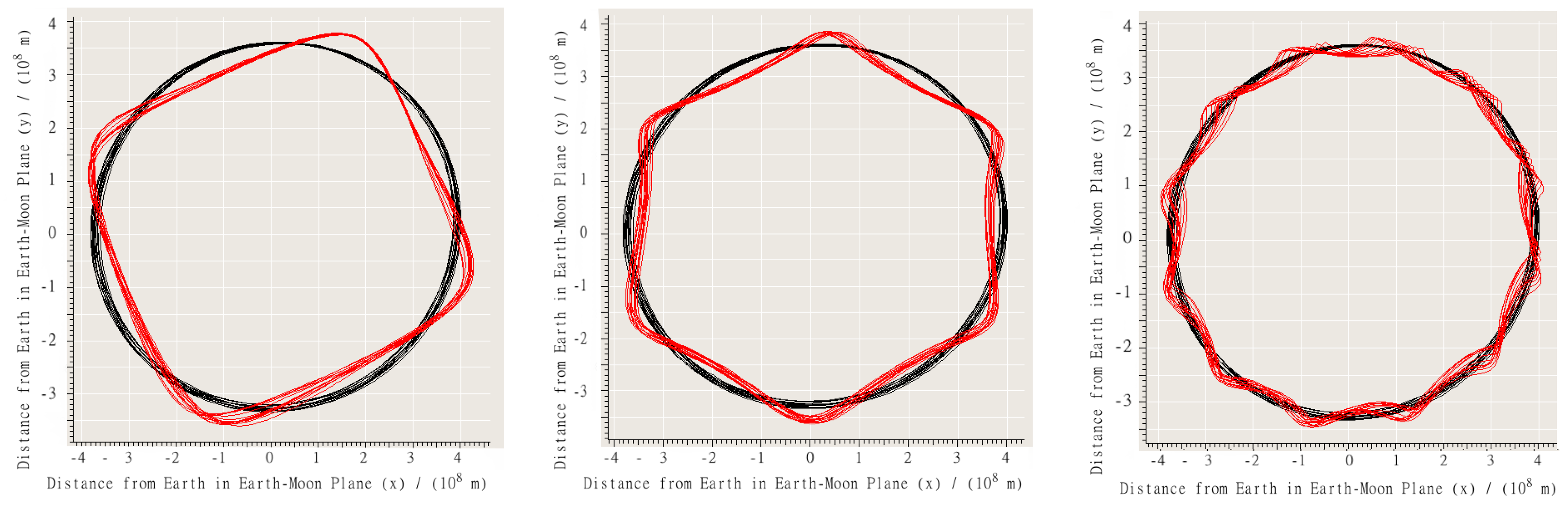
2.1.2. The Short Duration Resonances
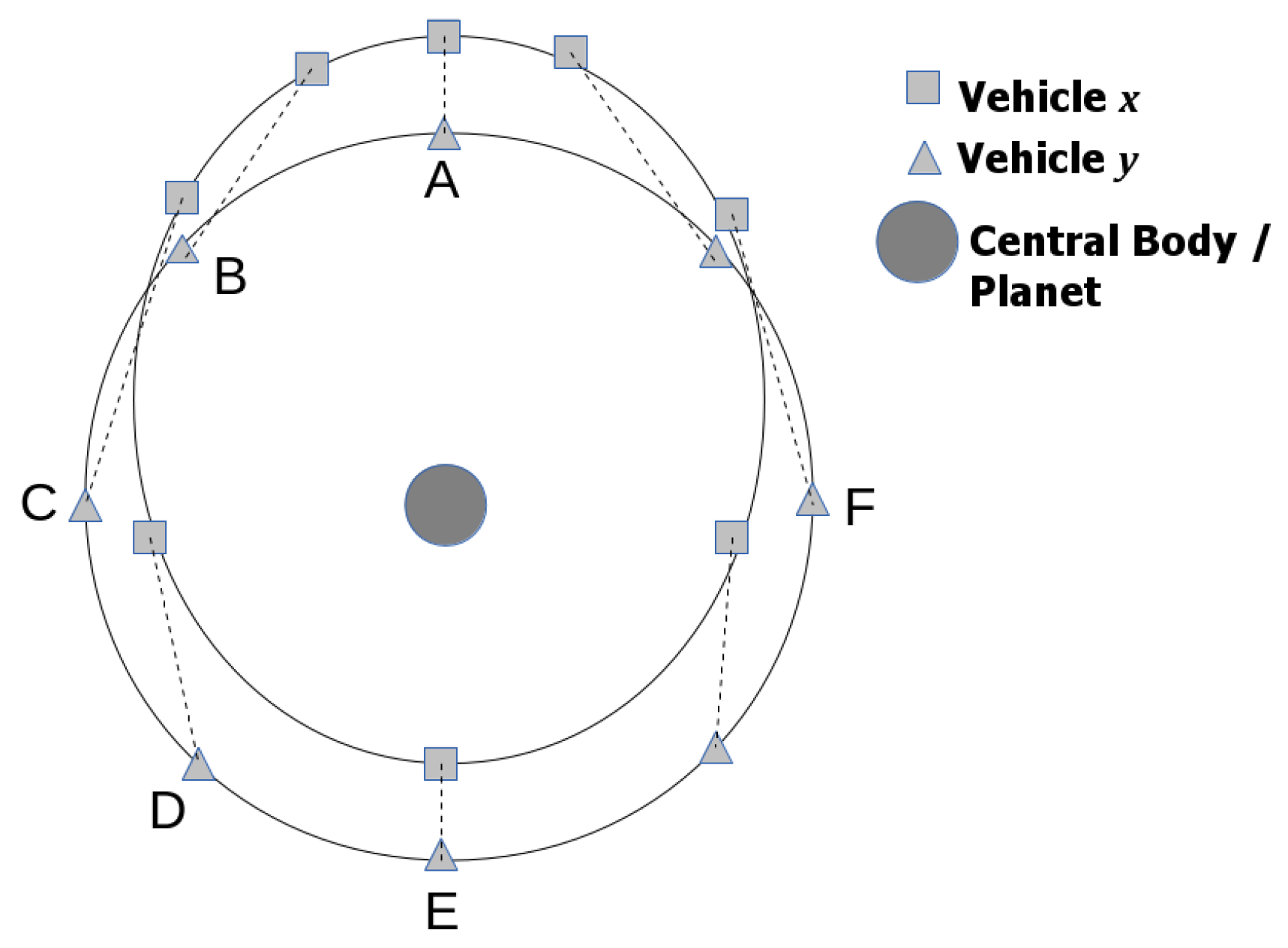
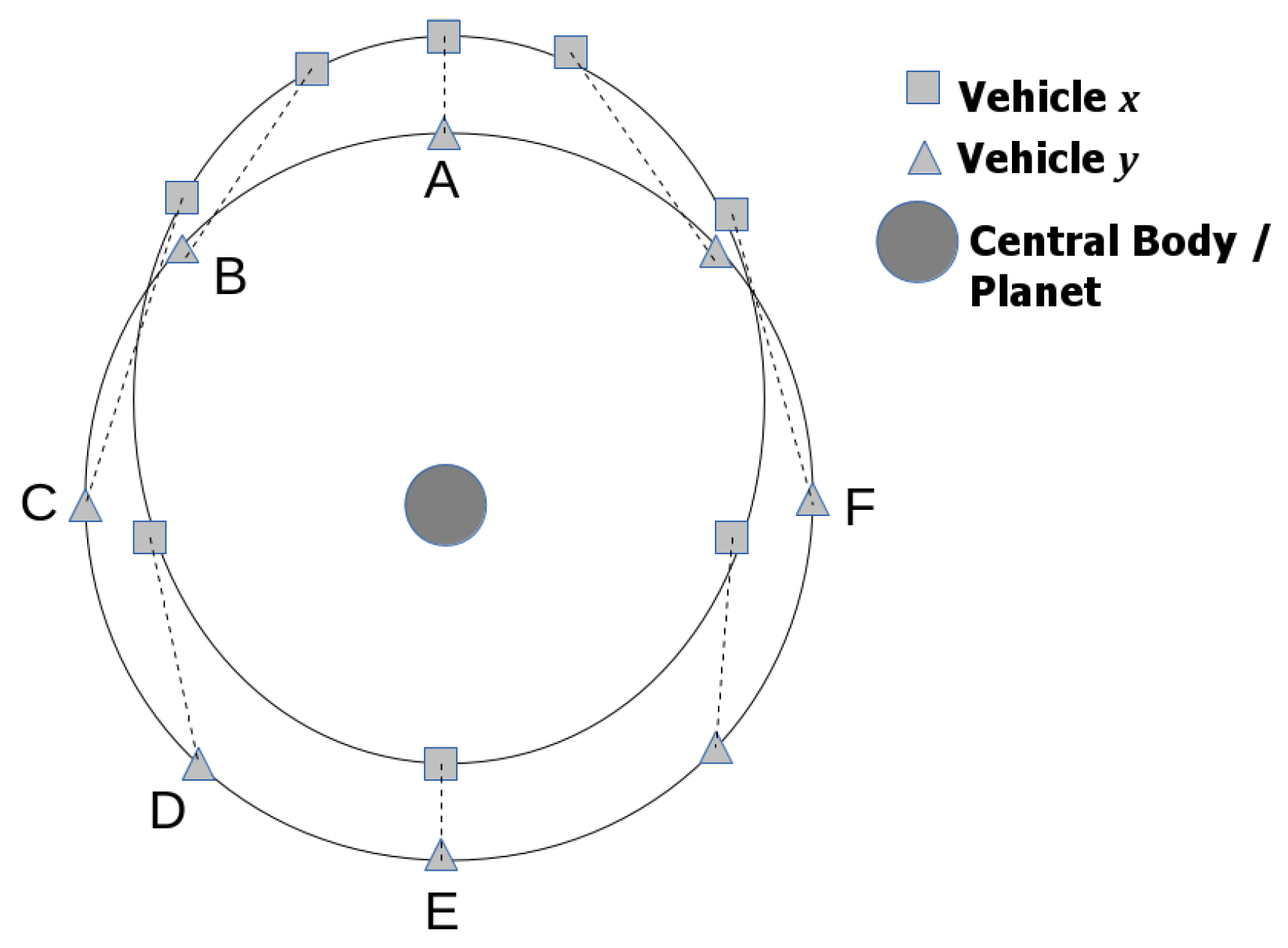
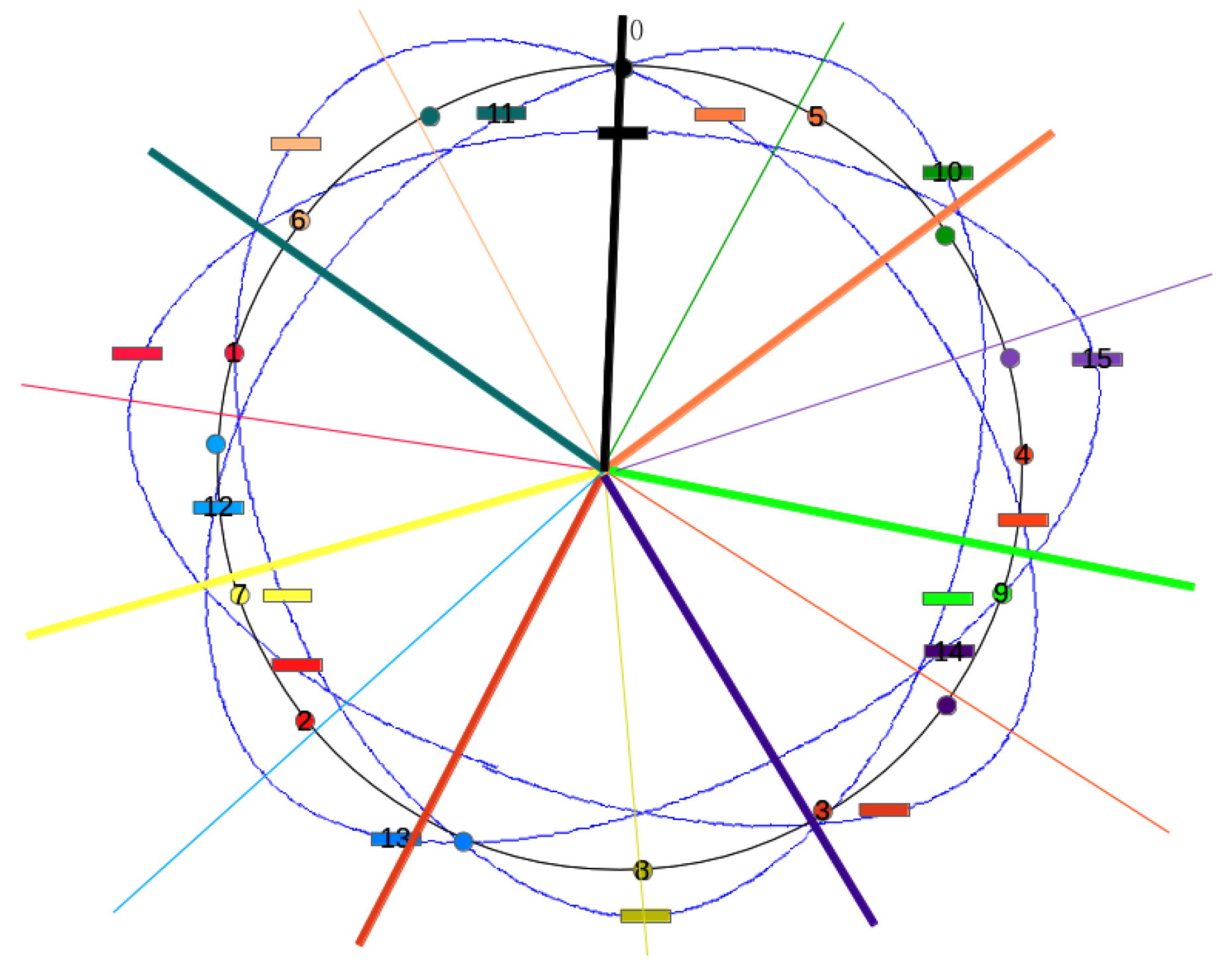
The 1:0:1 Resonance
- A
- The two vehicles are on the same radial line, with x at a higher altitude.
- B
- y has advanced ahead of x and remains at lower altitude.
- C
- y has advanced far ahead of x; the two are at comparable altitudes
- D
- x begins the inevitable gain on y while descending to lower altitude.
- E
- The two vehicles are again on the same radial line, but with x at the lower latitude.
- F
- The two vehicles are again at comparable altitudes, with x now ahead of y.
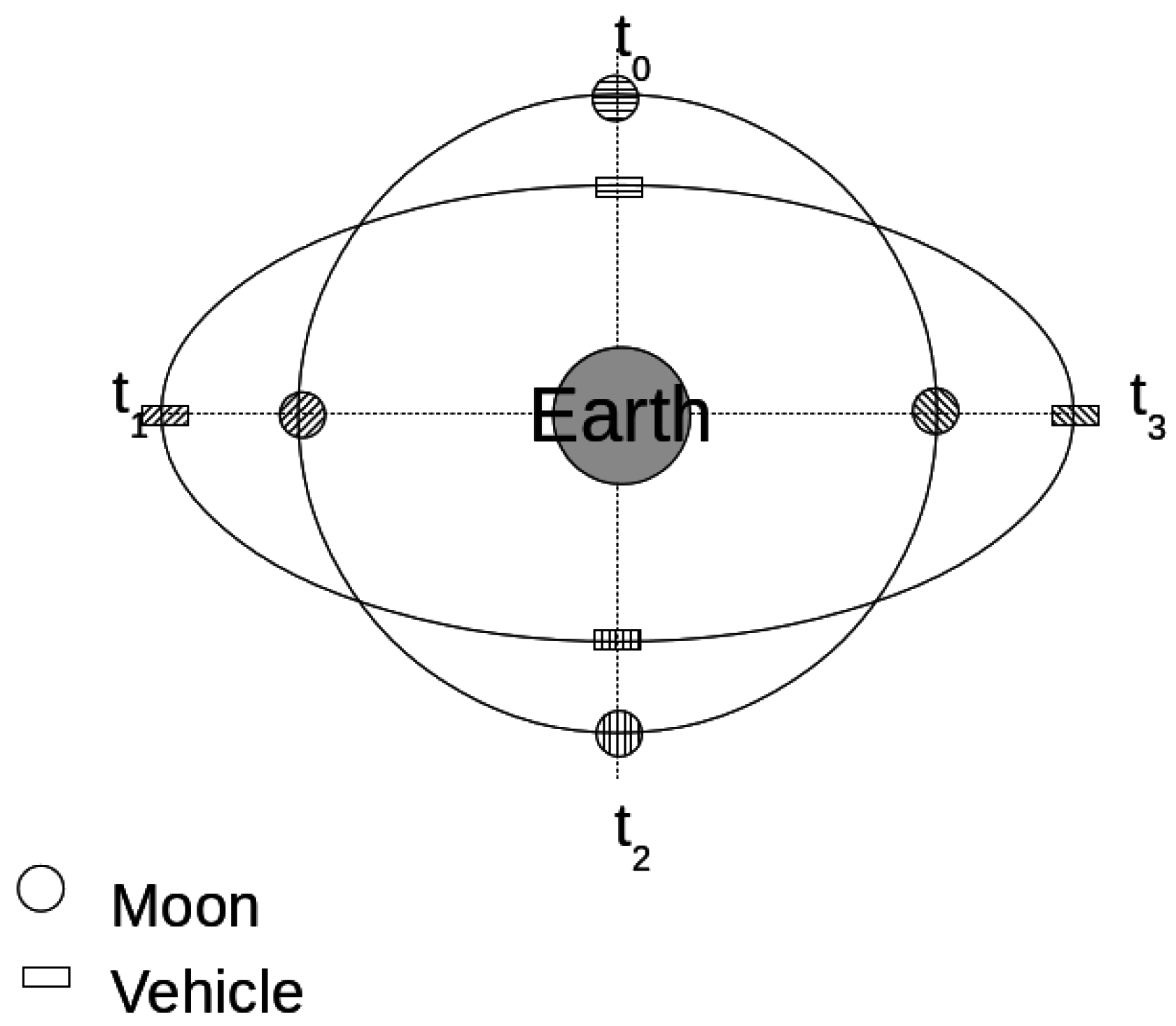
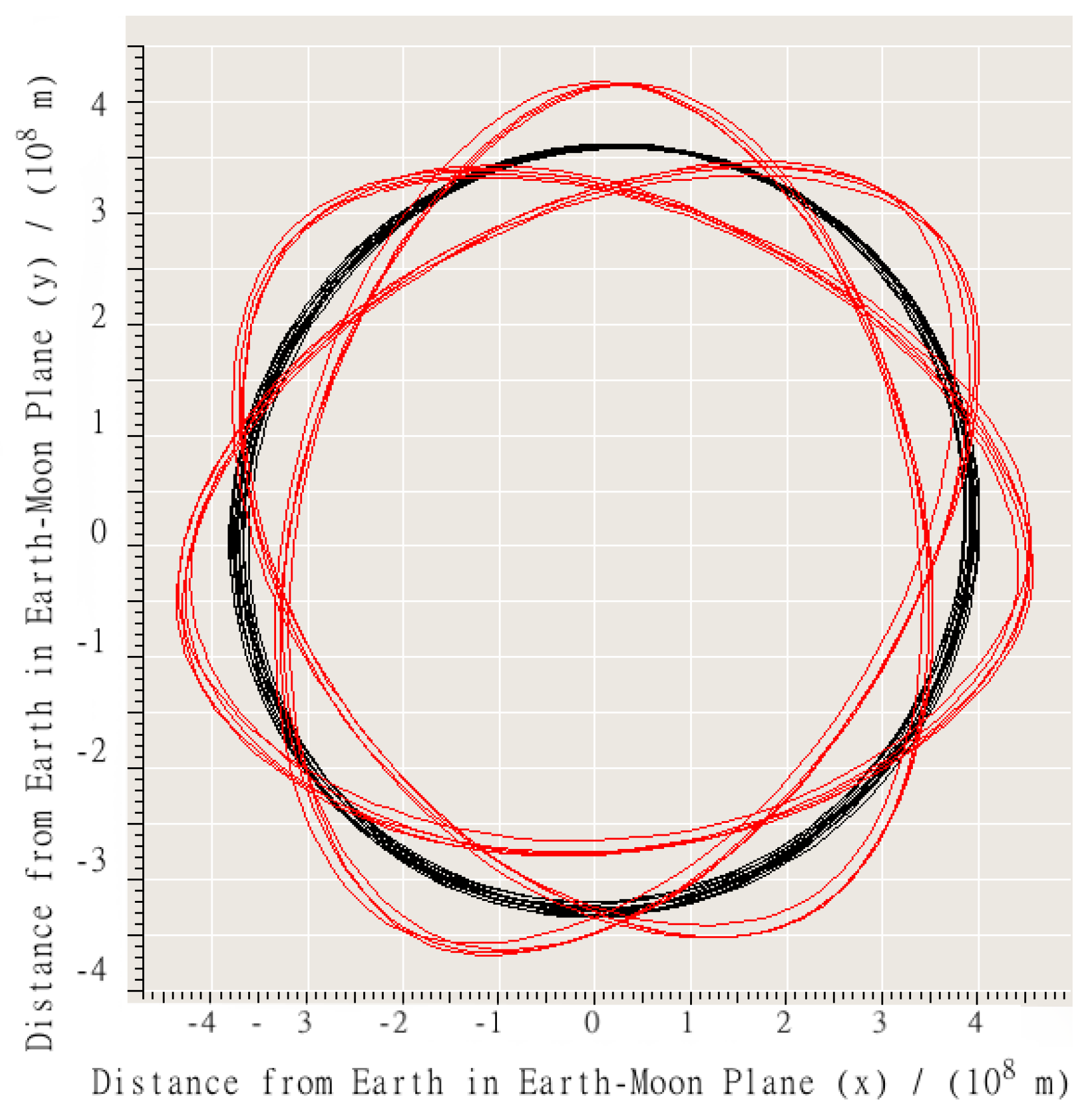
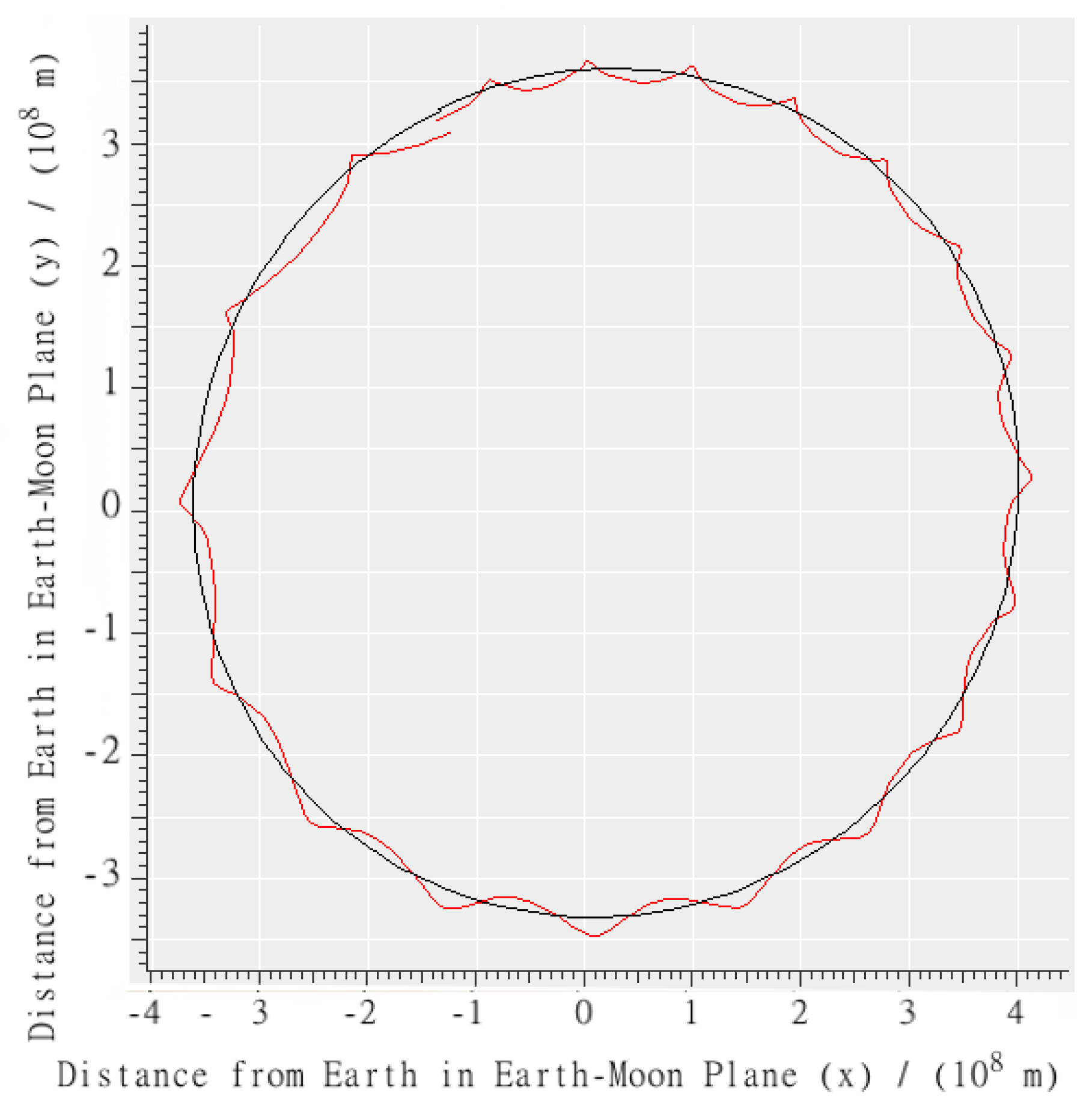
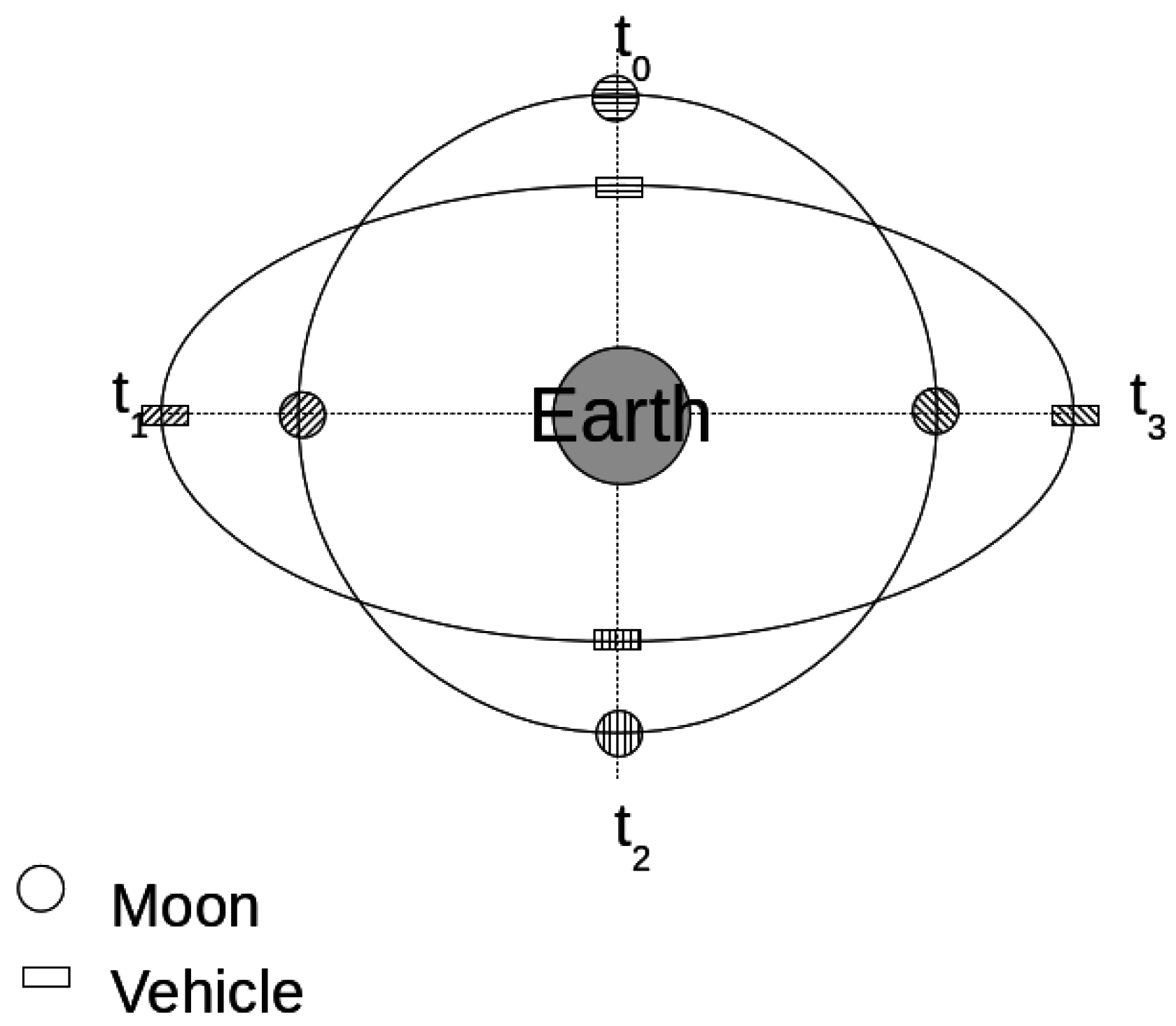
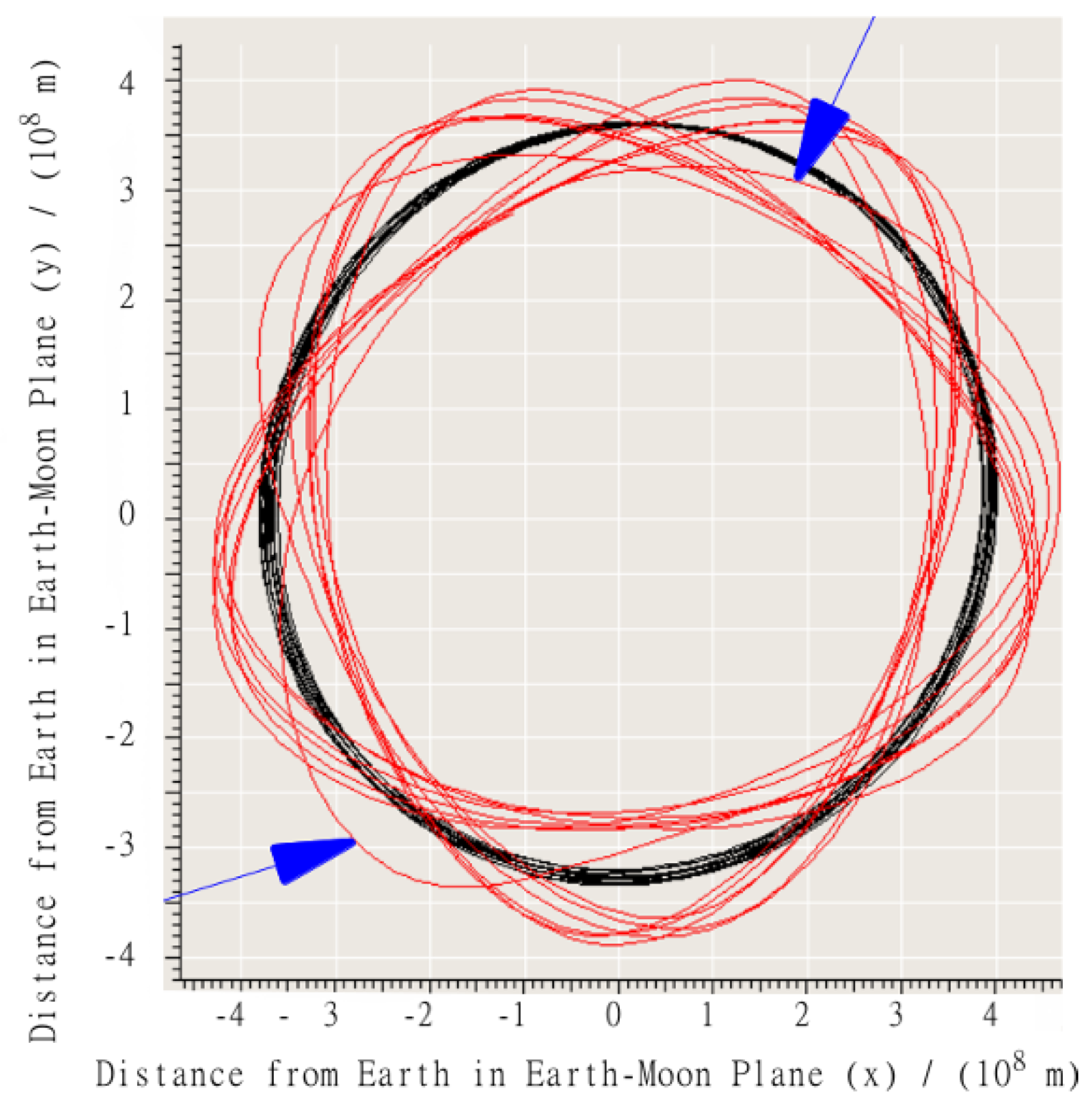
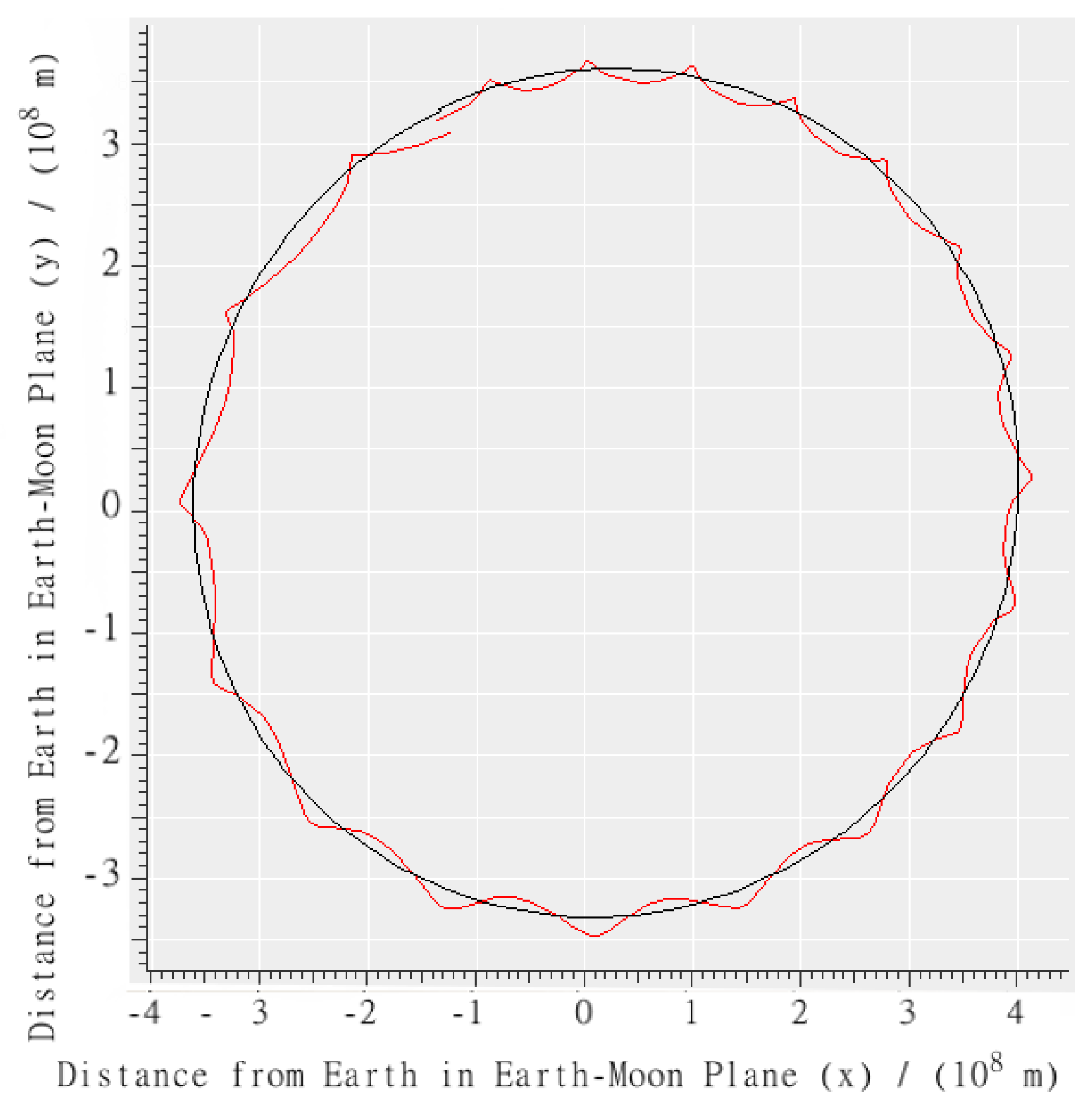
The 1:1:2 Resonance
- The vehicle passes once around Earth in the inertial frame (above-left-below-right), moving counter-clockwise ().
- The moon passes once around Earth in the inertial frame (above-left-below-right), moving counter-clockwise ().
- The vehicle passes once around Moon in the inertial frame (below-left-above-right), moving clockwise (). Note that this is a retrograde motion.
- The vehicle passes twice around Moon in the rotating frame (near-side—far-side—near-side—far-side, where “near-side” means the vehicle is between Earth and Moon, and “far-side” means the moon is between the vehicle and Earth). This motion is also clockwise, or retrograde. ().
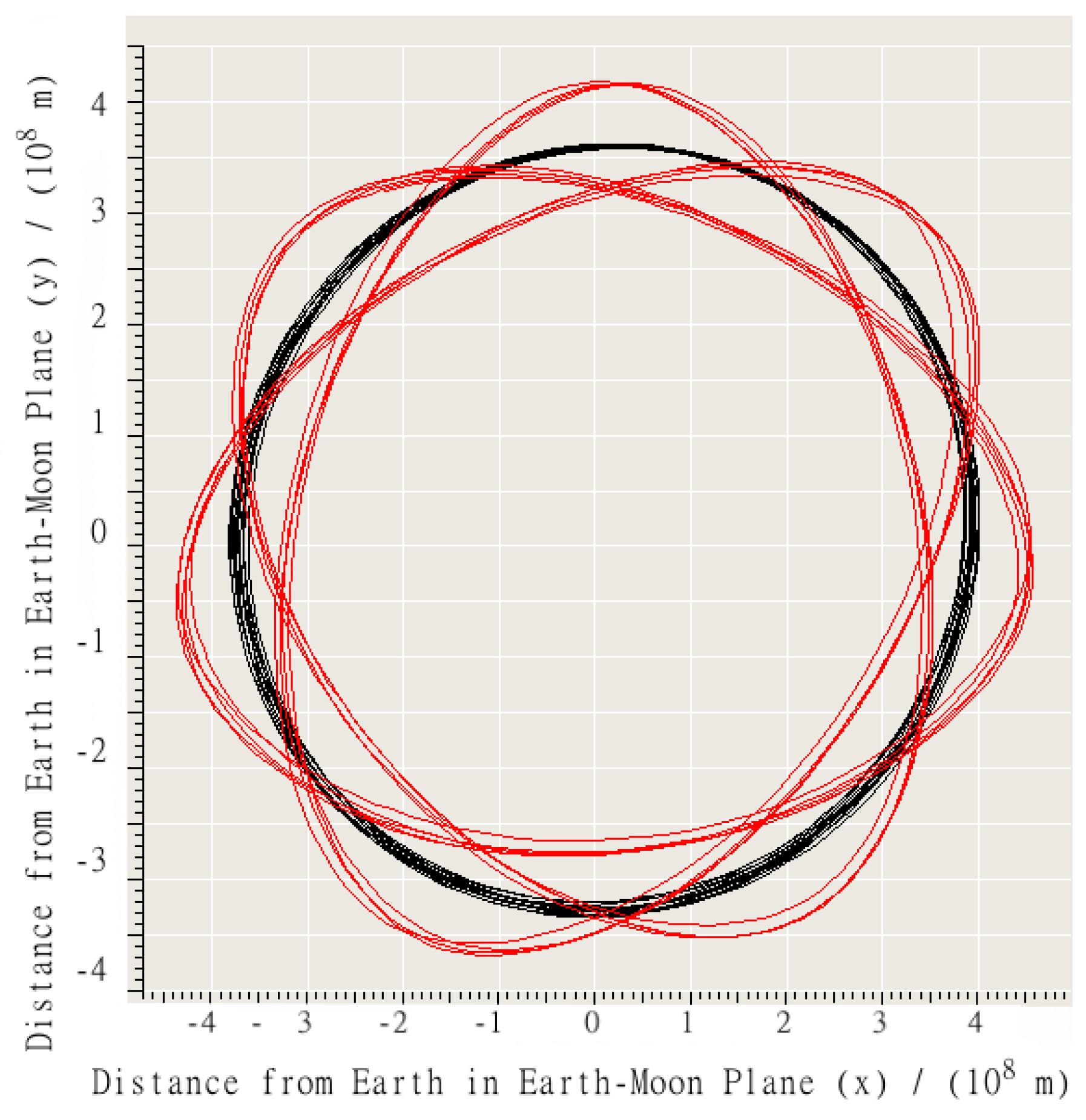
The 1:2:3 Resonance
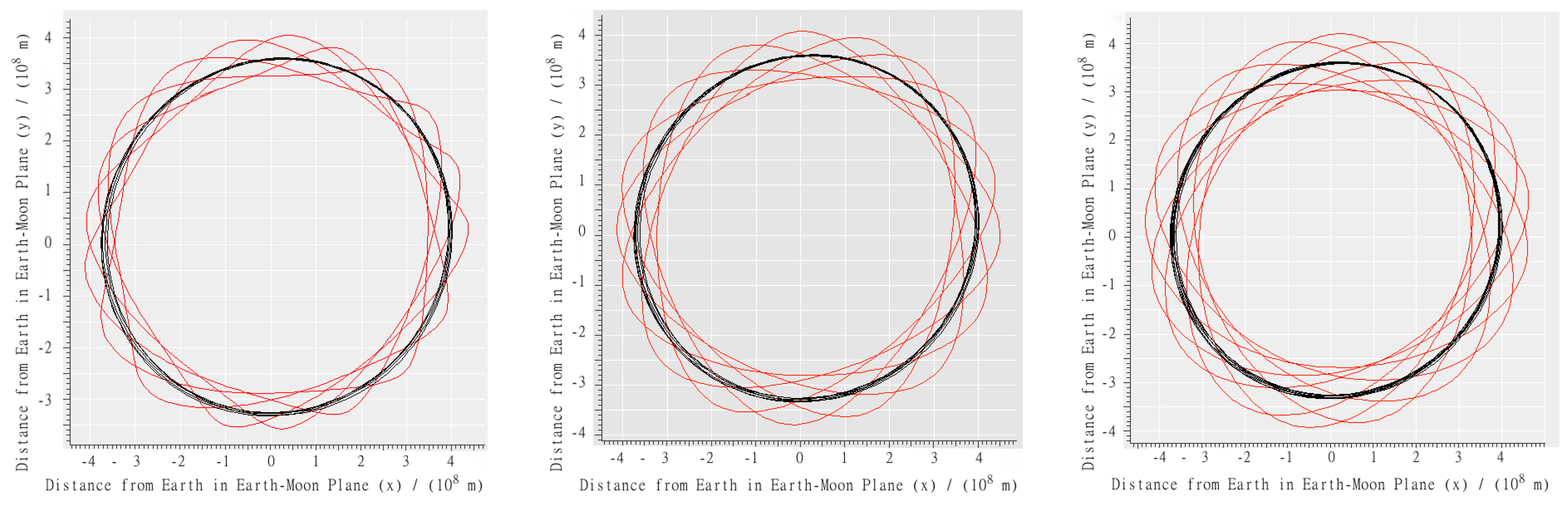
The 1:x:x+1 Resonances
The 2:x:x+2 Resonances
The 3:x:x+3 Resonances
2.1.3. Longer Duration Resonances
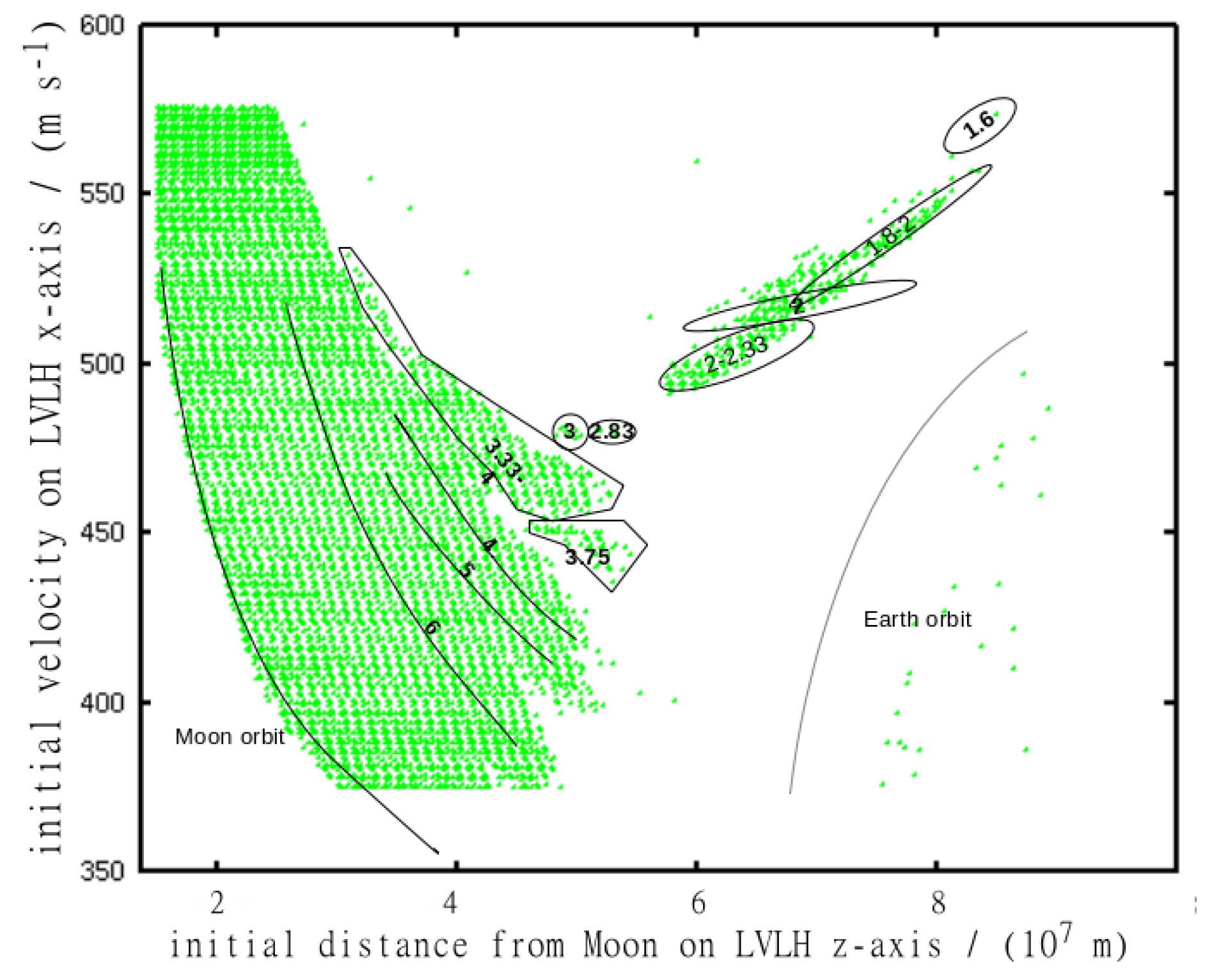
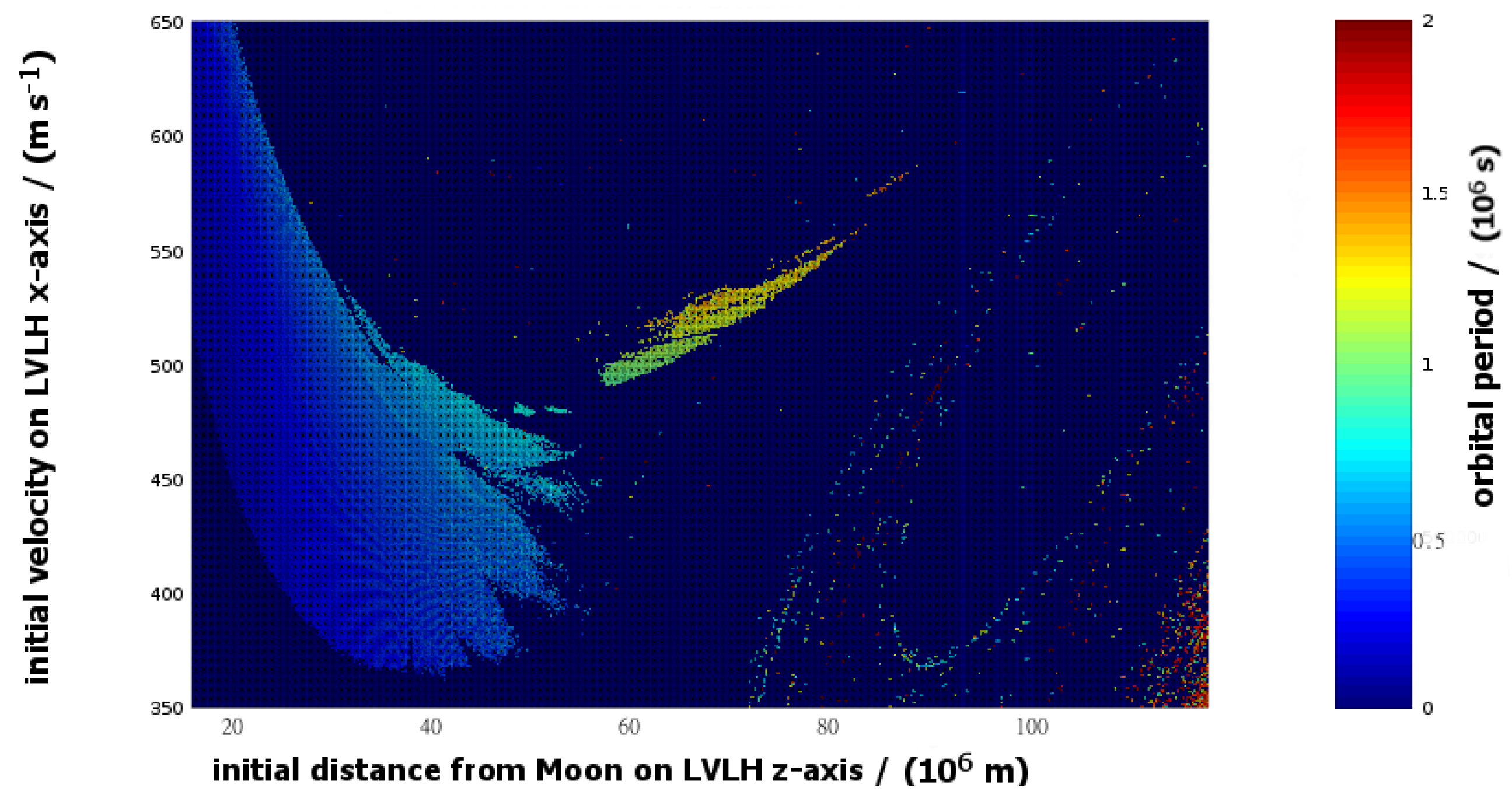
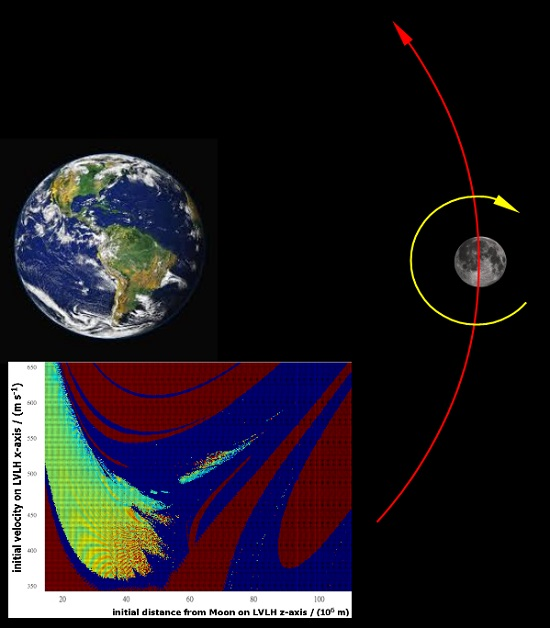
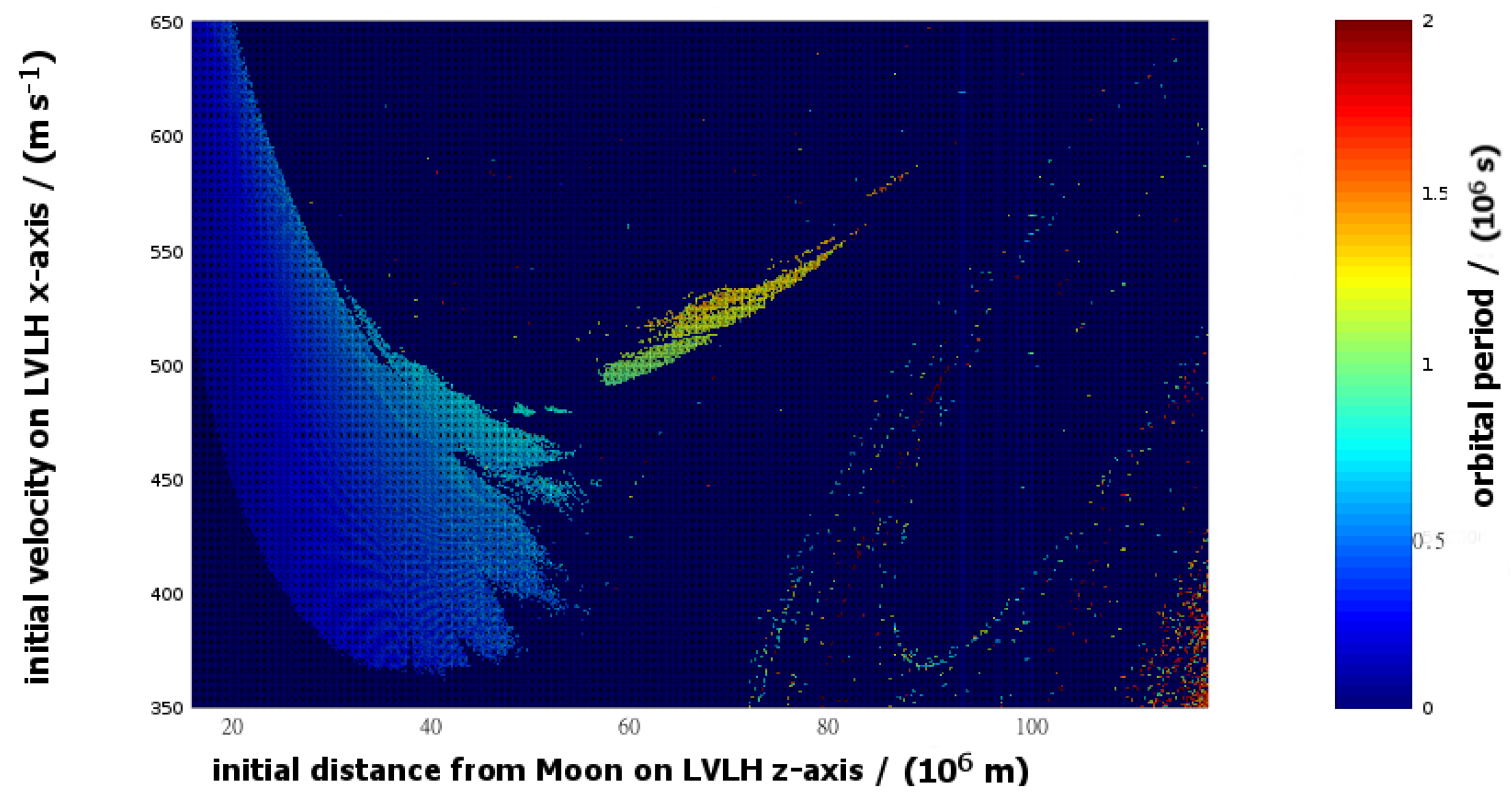
2.2. Analysis of the Stability of DROs
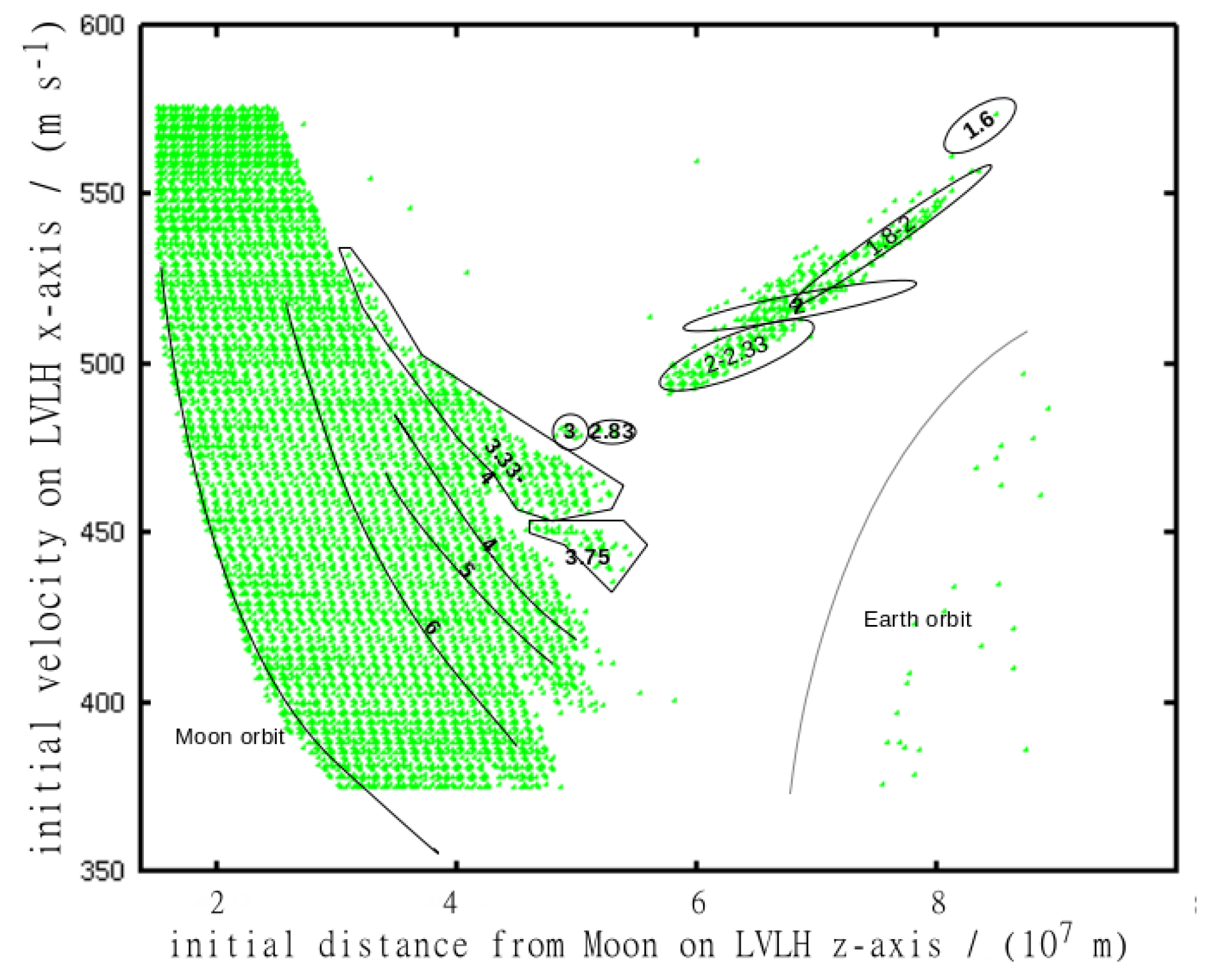
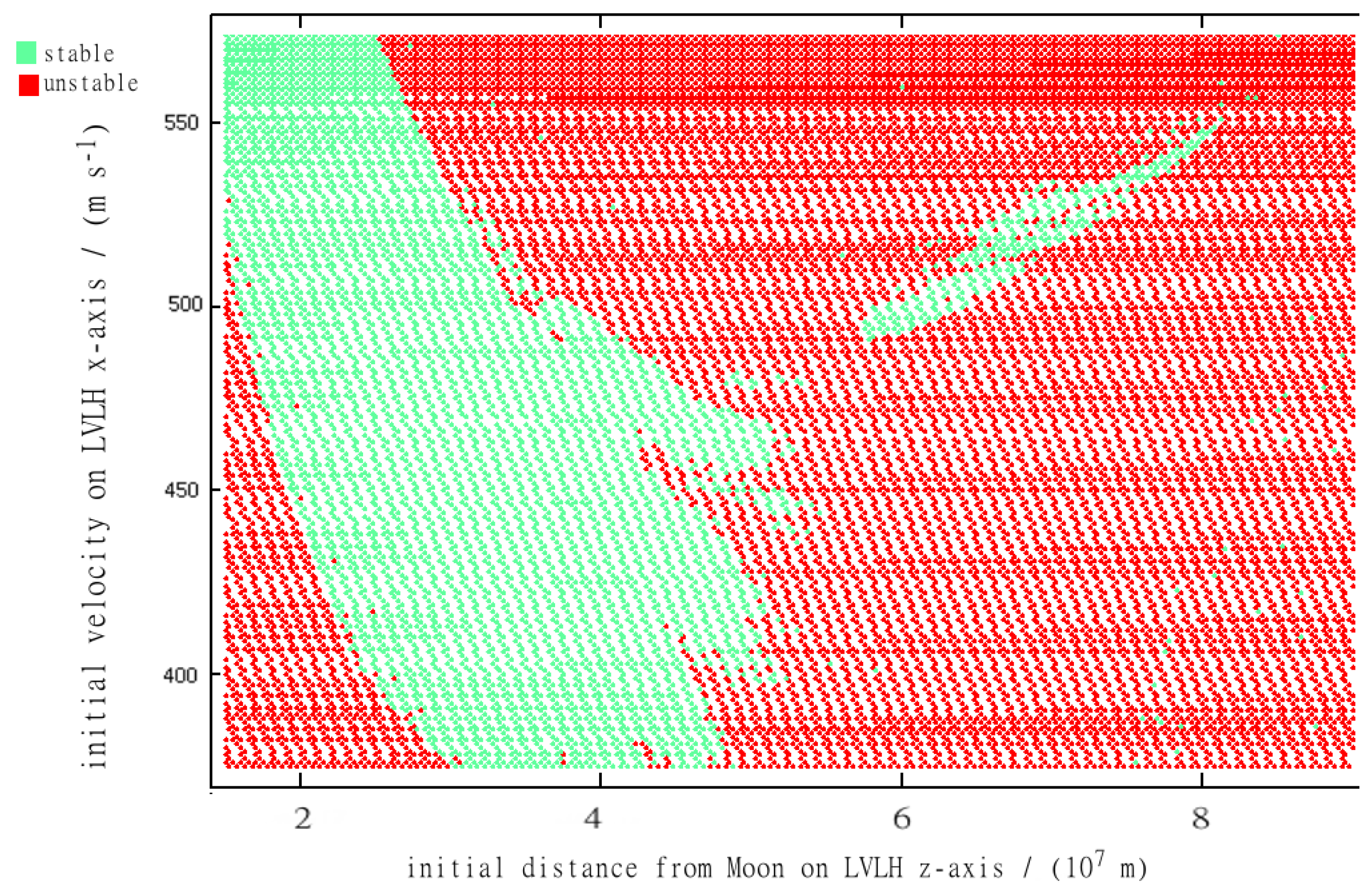
- distance from Moon, along the Moon-to-Earth position vector, and
- Moon-relative velocity in the Earth–Moon orbital plane, perpendicular to the Moon–Earth position vector.
- the position, restricted to the range m (from Moon-center) along the negative x-axis, and
- the velocity, restricted to the range m·salong the positive y-axis.
- the position, restricted to the range m along the positive z-axis, and
- the velocity, restricted to the range m·s along the positive x-axis.
- LVLH (complete the reference-frame) : Synodic
- LVLH (negative orbital angular momentum vector) : Synodic
- LVLH (Moon–Earth vector) : Synodic
- Not all resonances are present;
- Of those that are present, the stable zones surrounding those characteristic curves are sized differently;
- the higher-order, lower-altitude resonances fall within a continuum of states that remain stable for the 30-year duration.
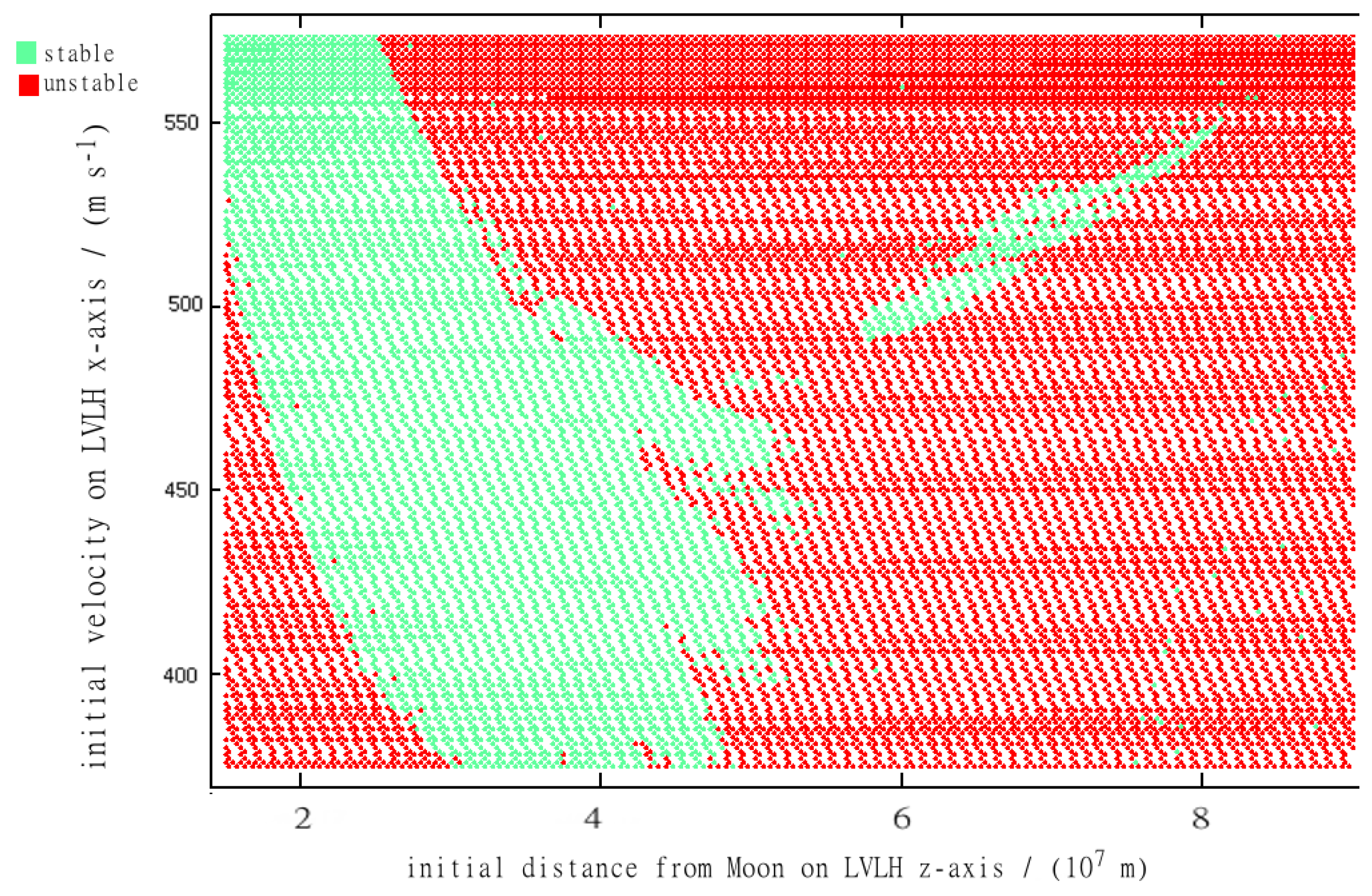
Analysis of Stable Zones
2.3. Long-Term Stability and Retention of Initial Conditions
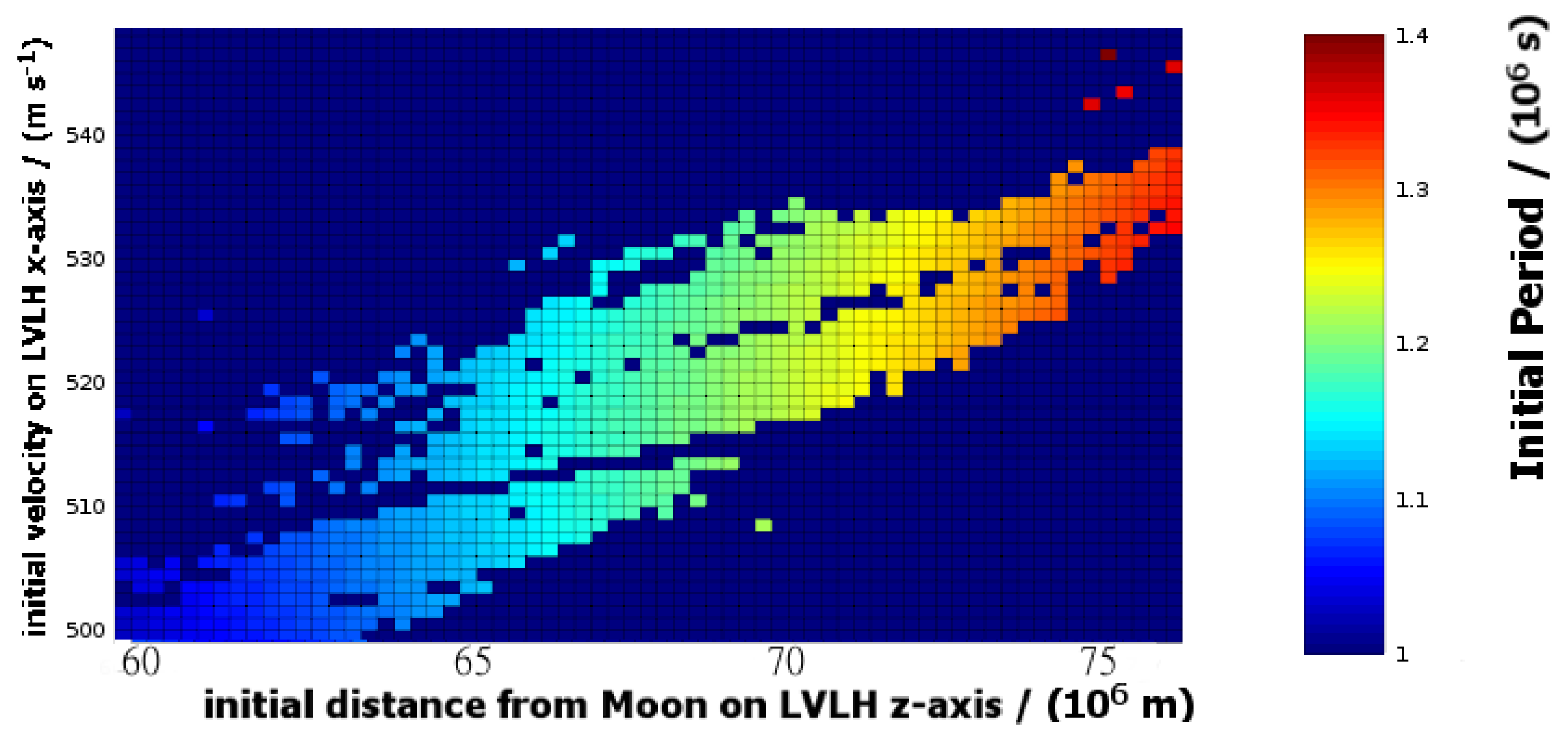
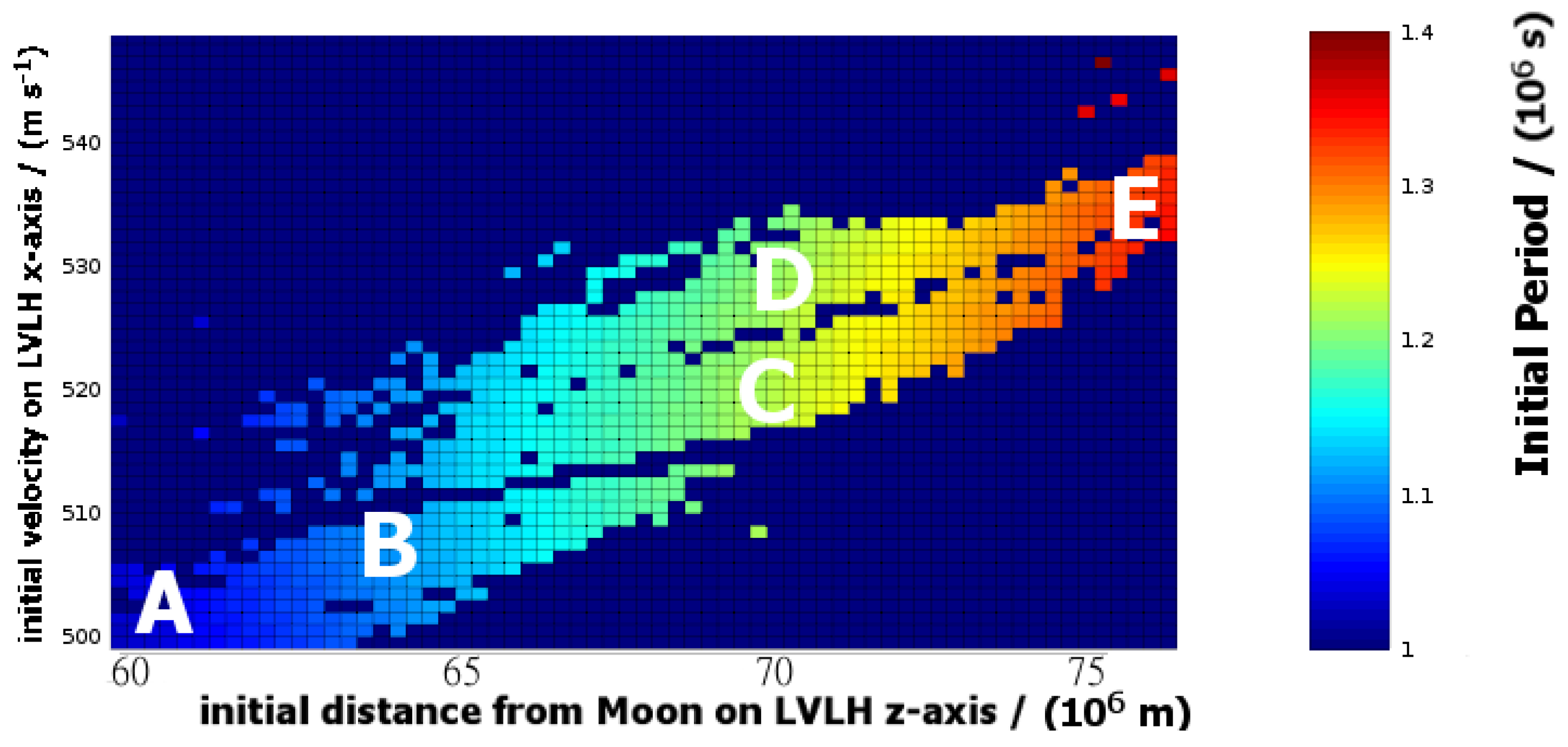
2.3.1. Orbital Periods
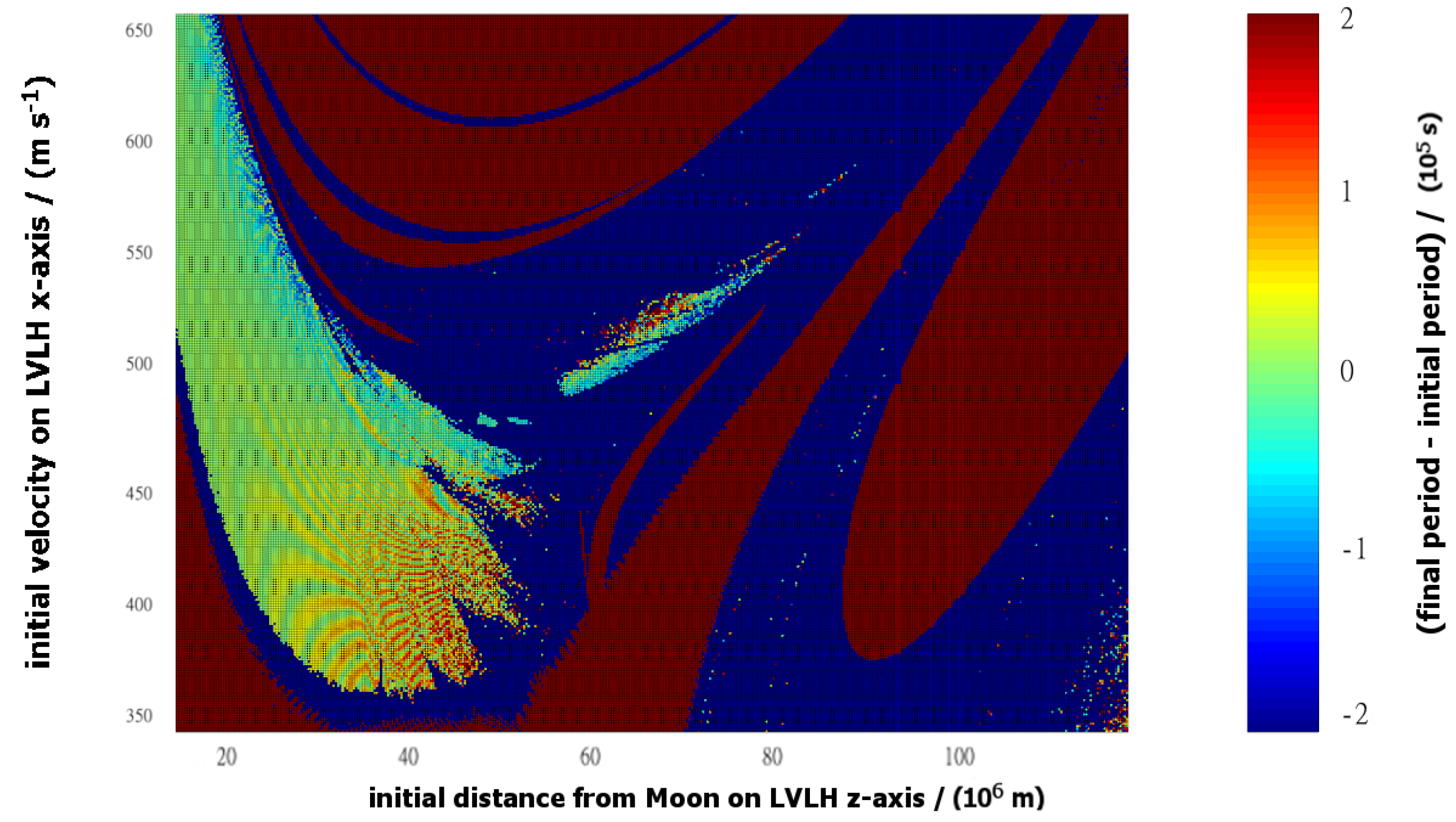
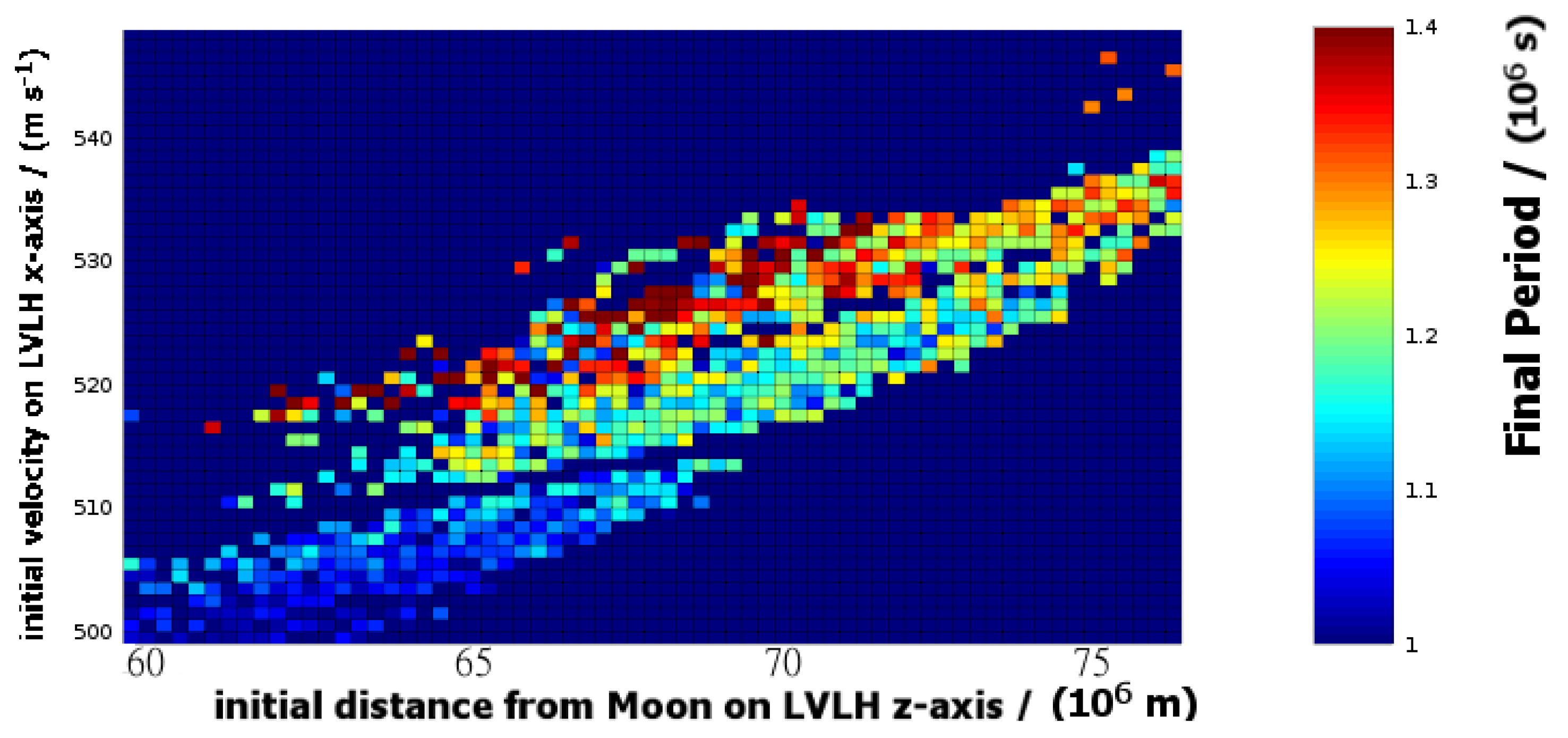
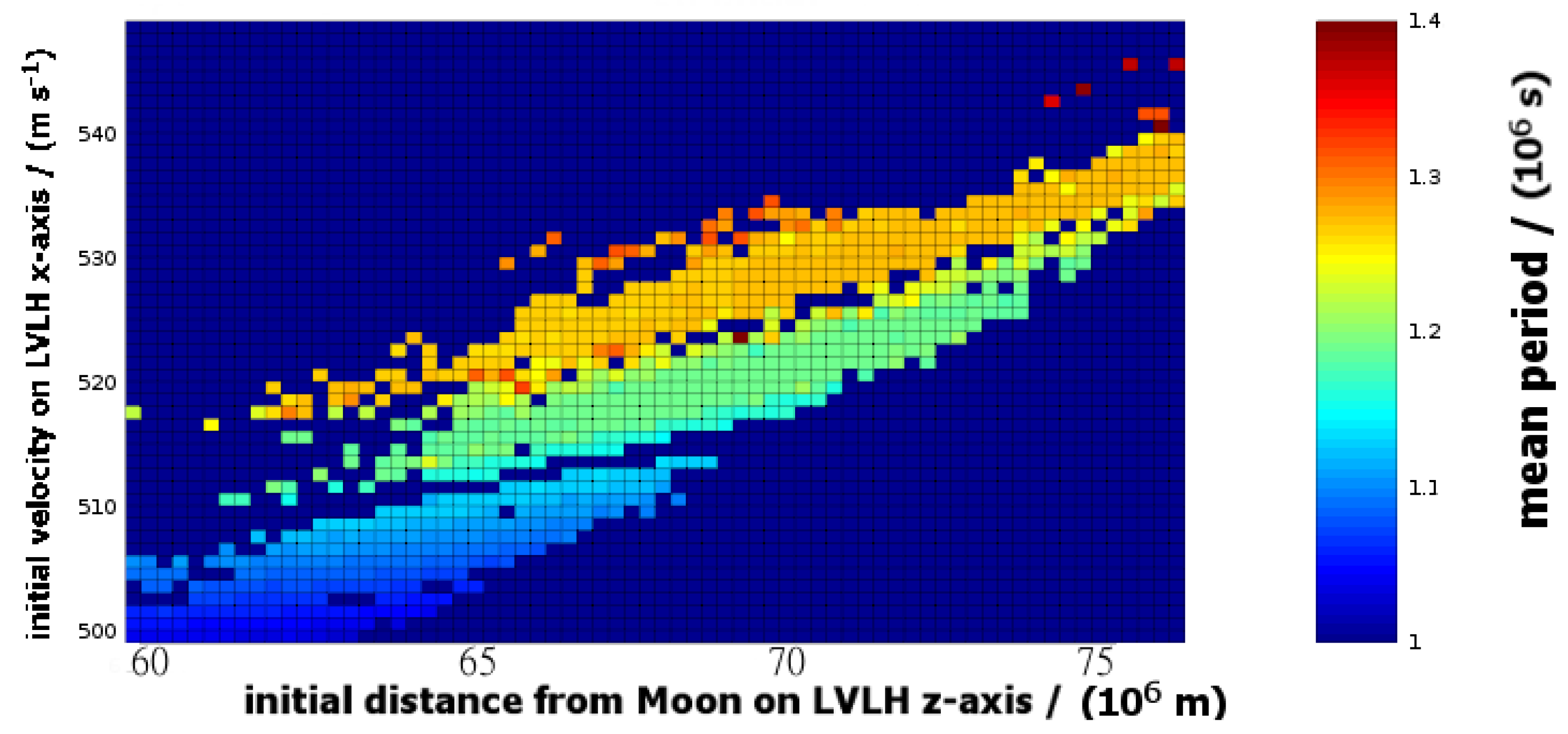
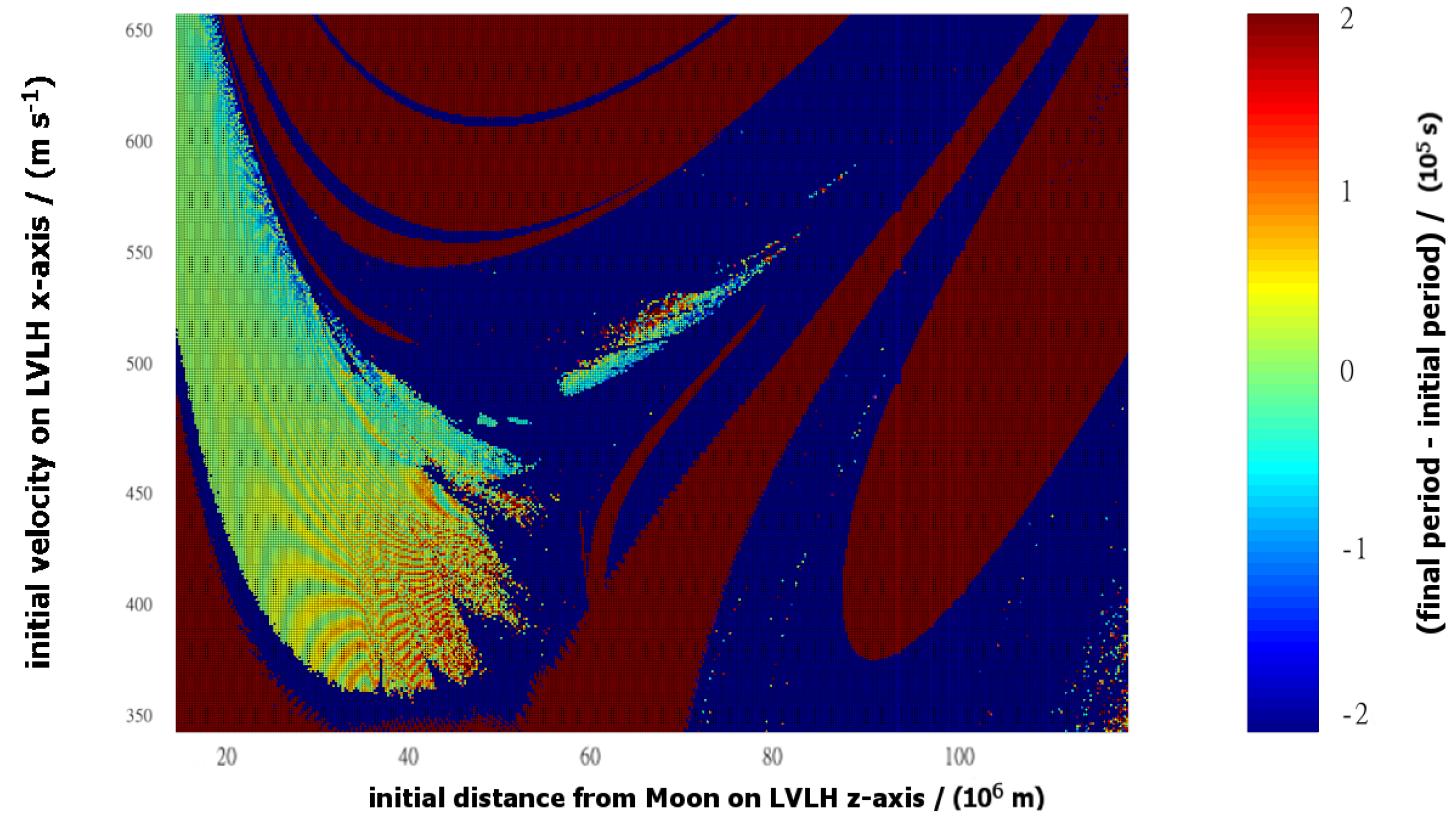
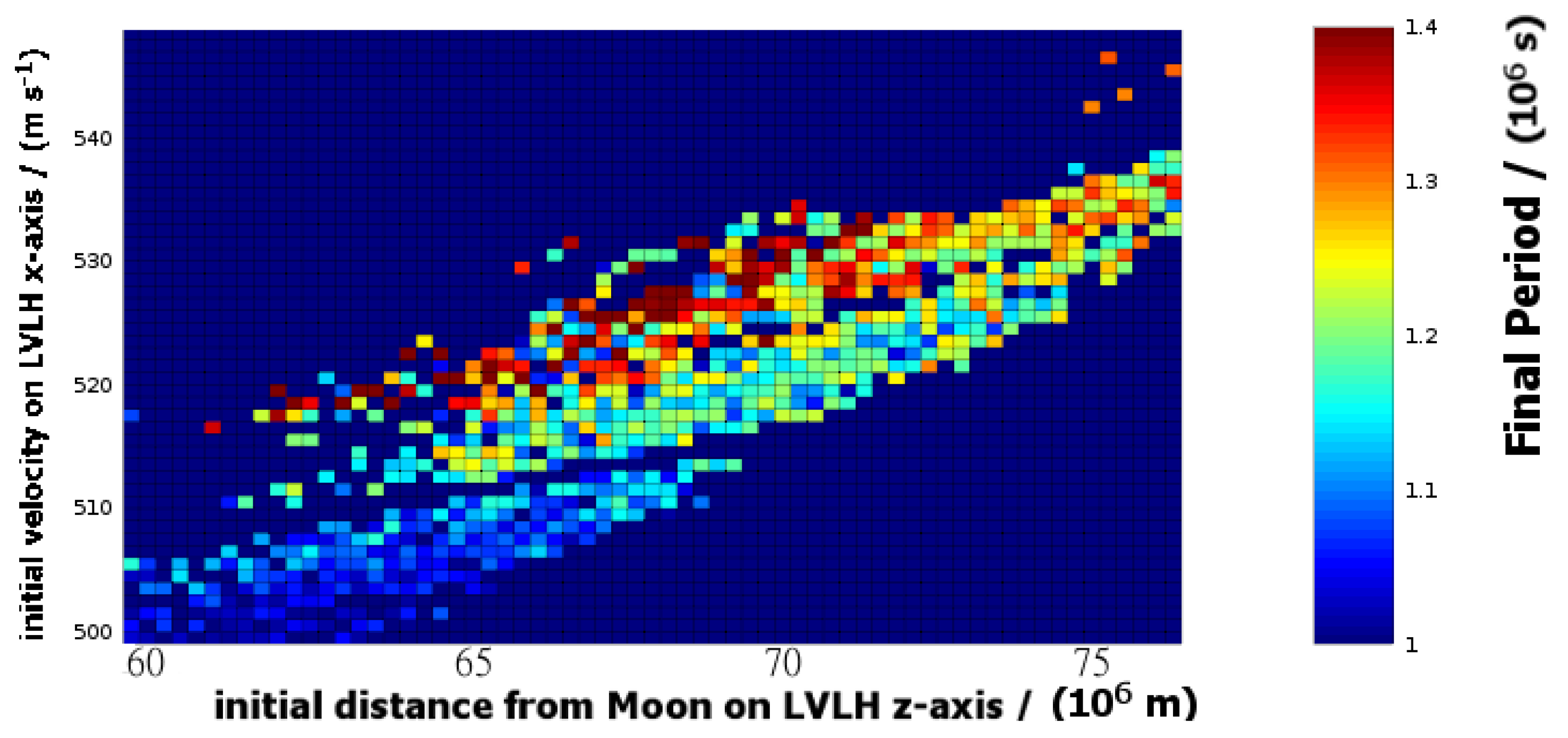
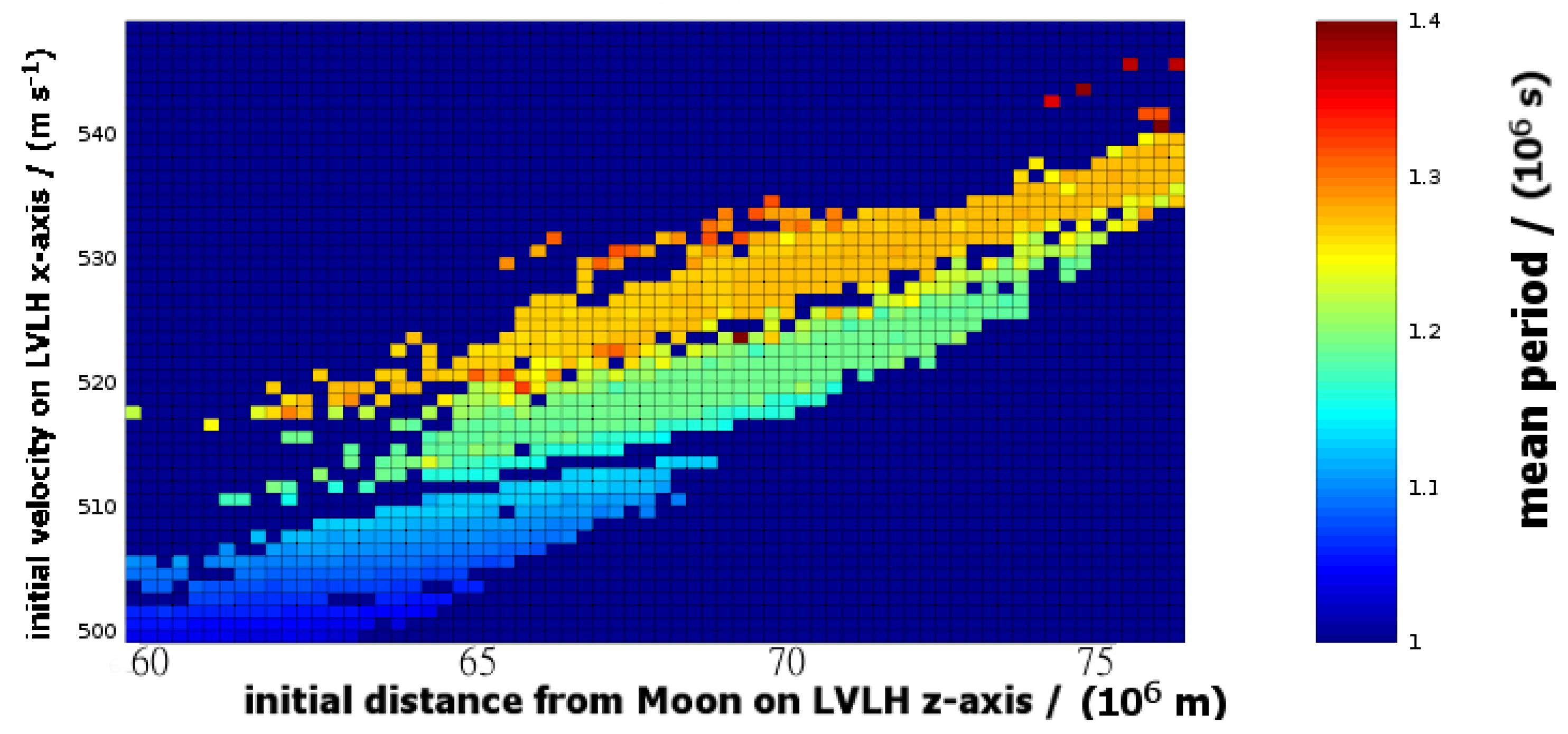
2.3.2. Variation in Orbital Periods
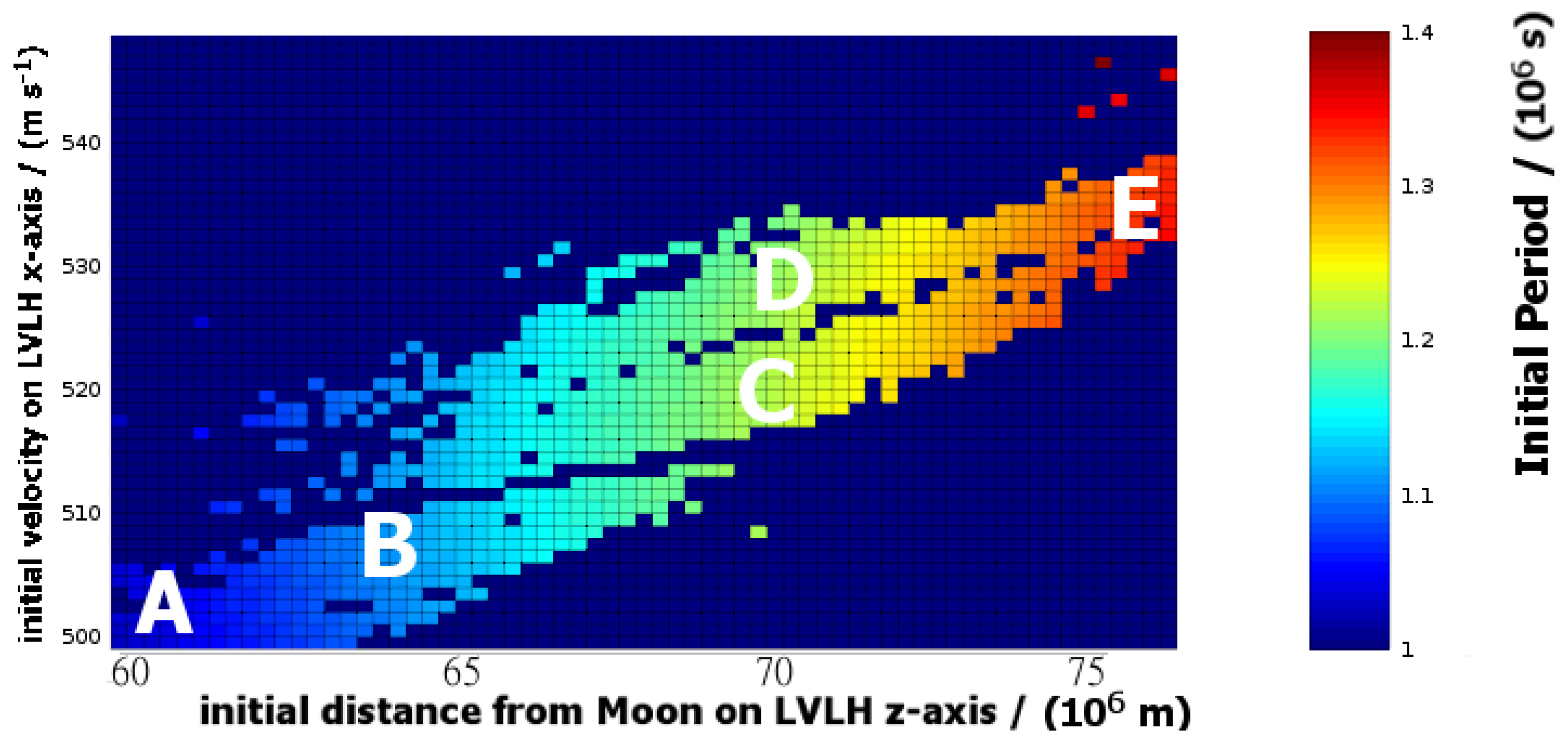
- In the stable island with m, the initial states on the lower right side tend to decrease in period, while the period of the states on the upper-left side tends to increase.
- The noticeable reduction in period along the upper right of the main island corresponds to region of that shows relatively high initial and final period (see Figure 14), and lies alongside a narrow strip of completely unstable initial conditions that failed to produce a single pass.
- The pattern of stripes seen at the low-velocity end of the main island are not at all understood. They could be artifacts of data selection, possibly a consequence of differencing only the single-values of initial period and final period in an area of state-space characterized by a continually evolving trajectory. This area requires additional study to be able to explain this feature.
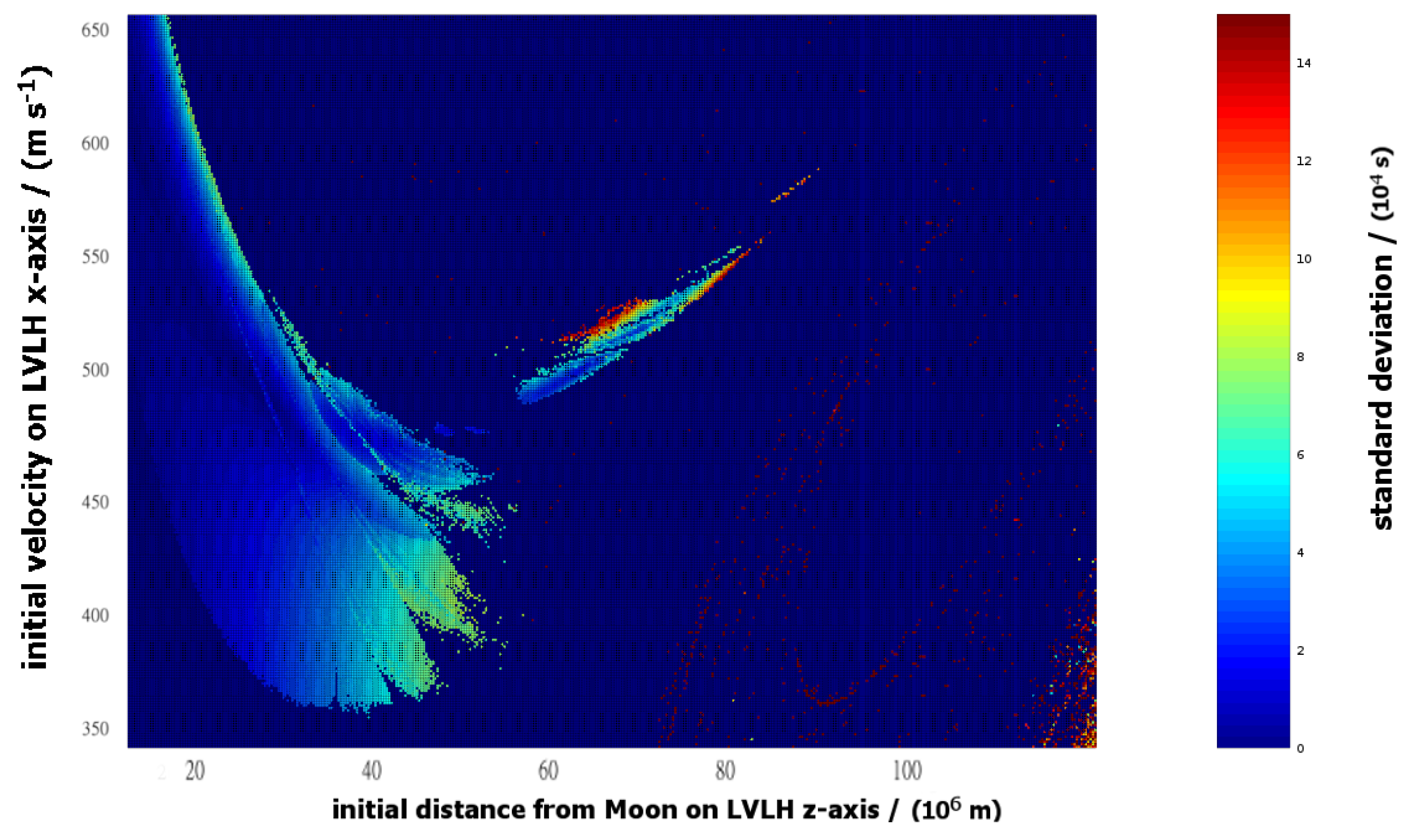
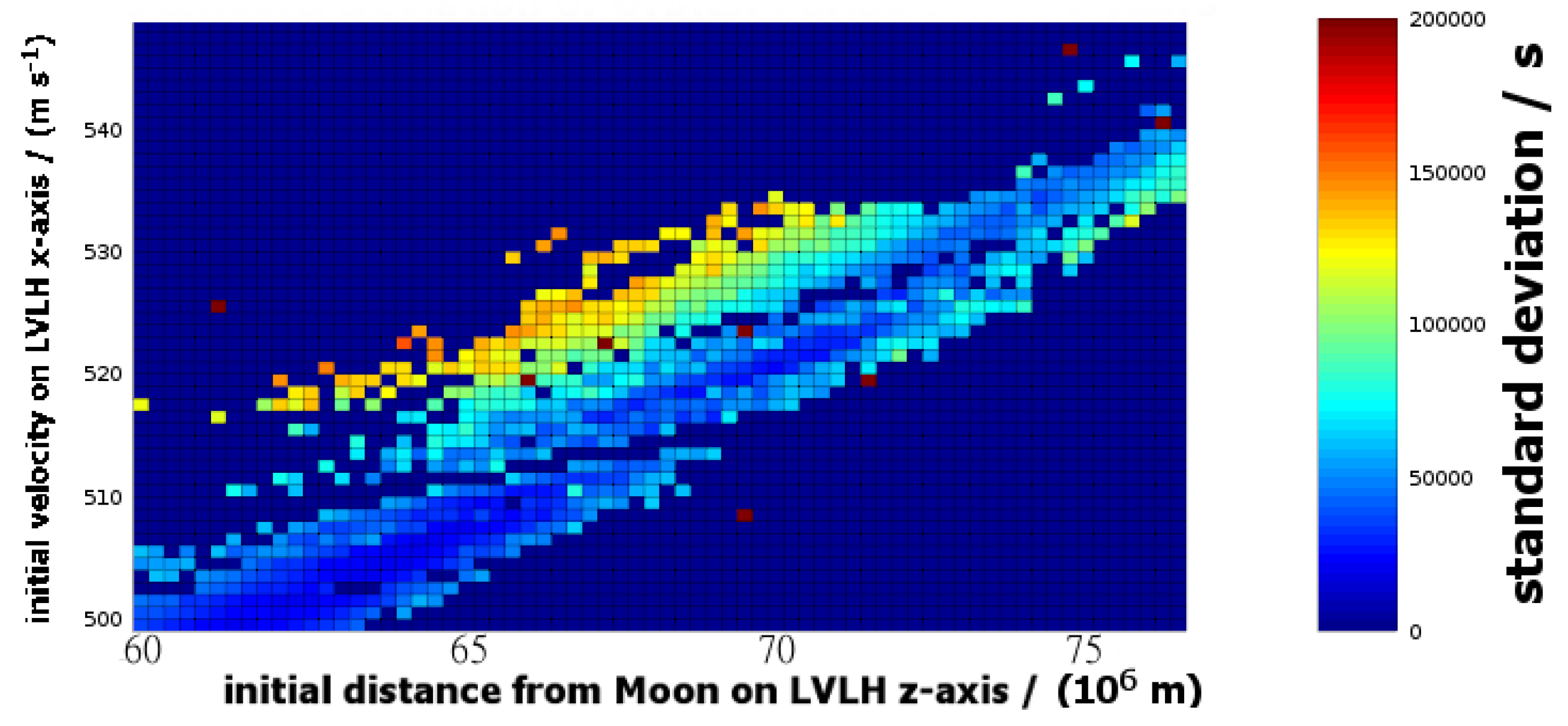
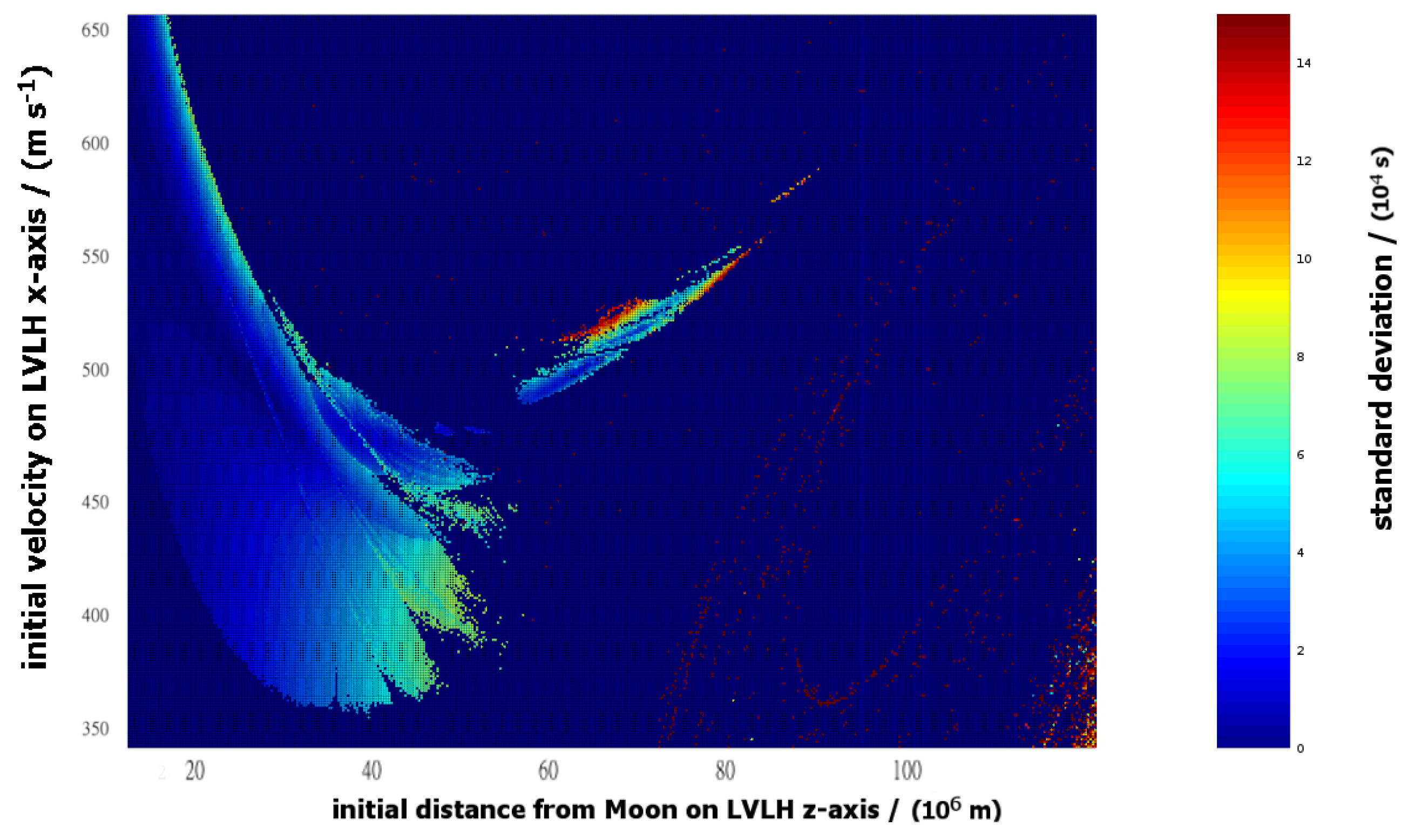
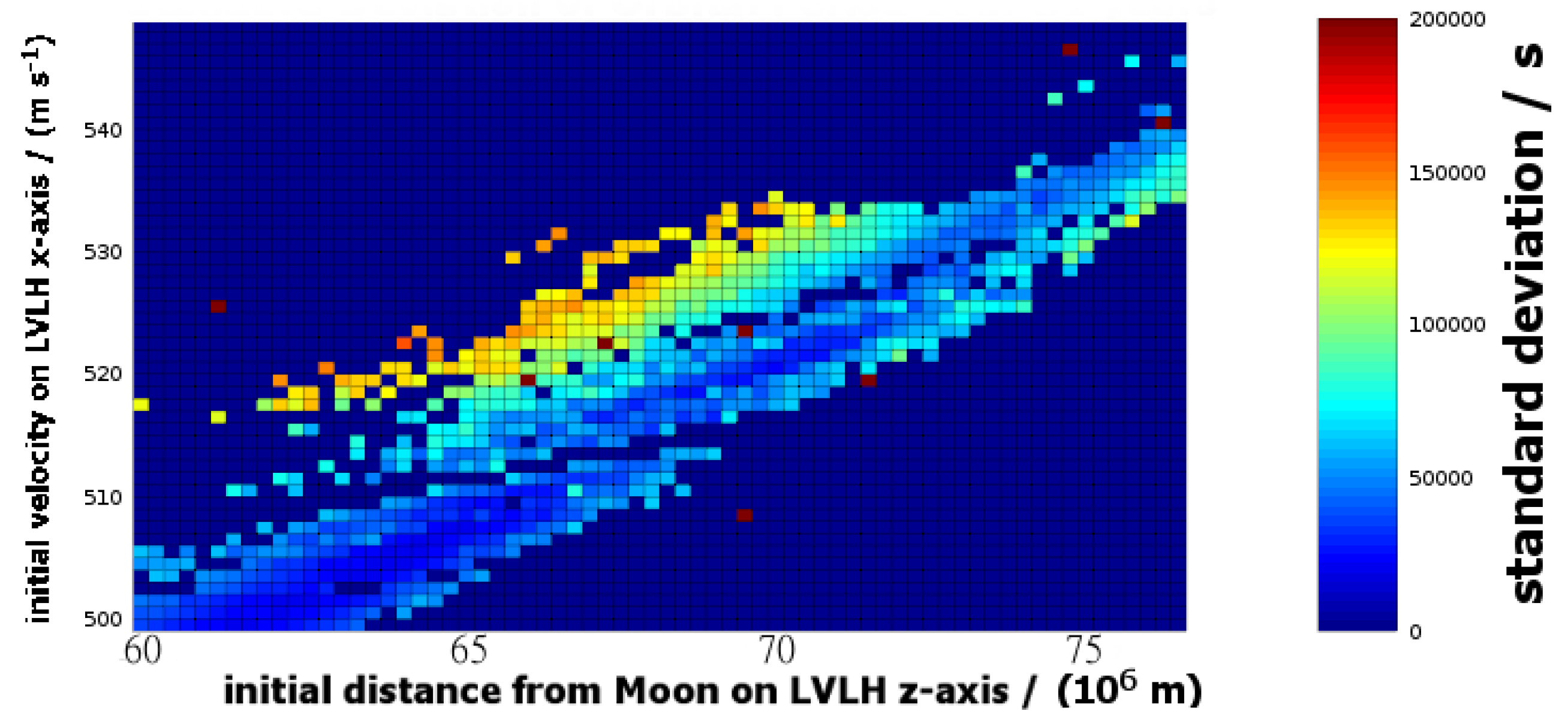
- the deep blue region in the center of the m island suggests that once established these orbits tend to be highly stable. Additionally, the initial conditions found in the upper-left area of this island show a significantly higher standard deviation than those states that lie in the lower-right area of this island. While it is expected that the initial conditions near the center line would be more stable, the asymmetry between the states “above” the center line and those “below” the line remains unexplained. This region is enhanced in Figure 17, and studied in more depth in Section 2.5.
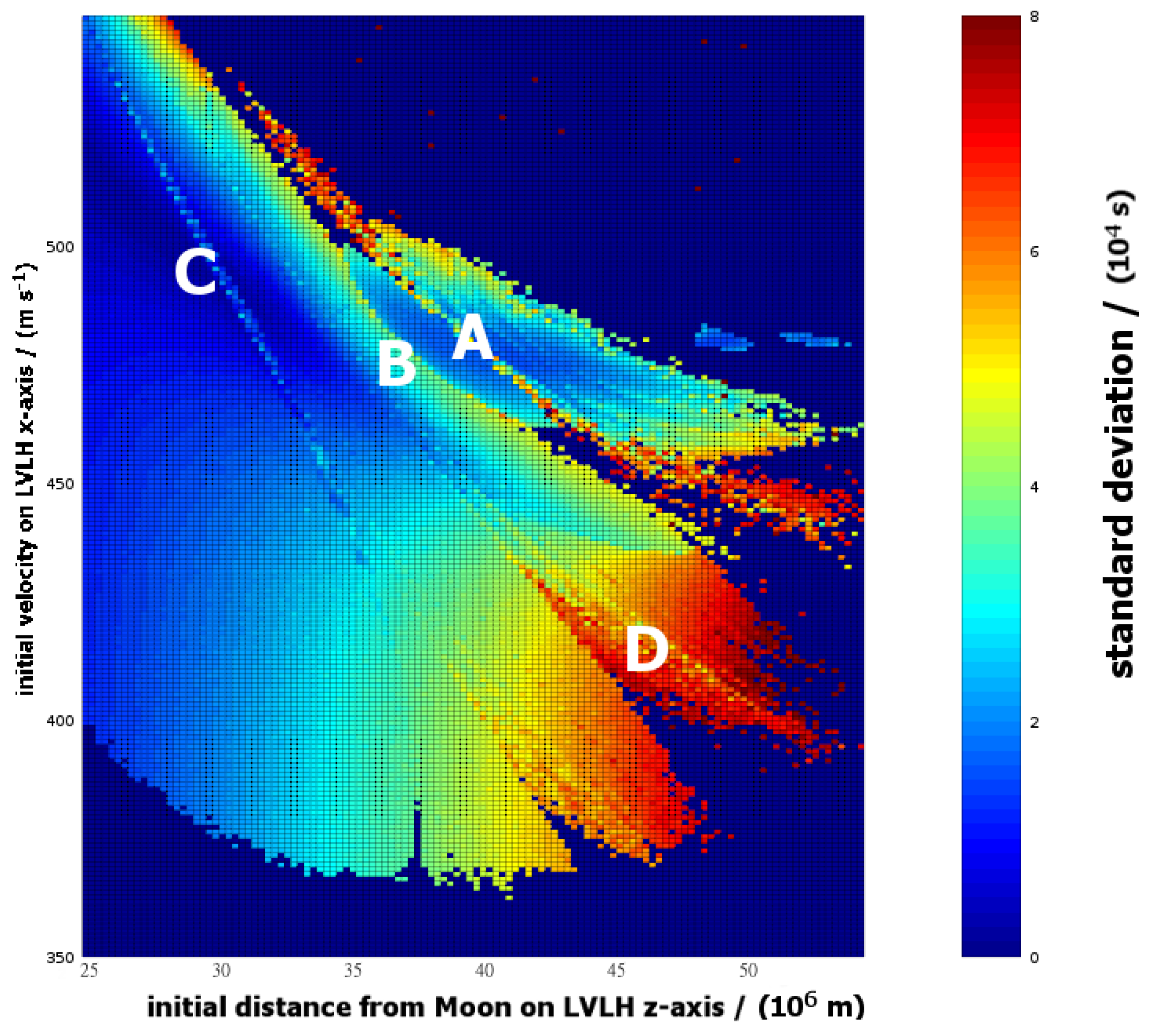
- the features in the main island. These are illustrated further in Figure 18.
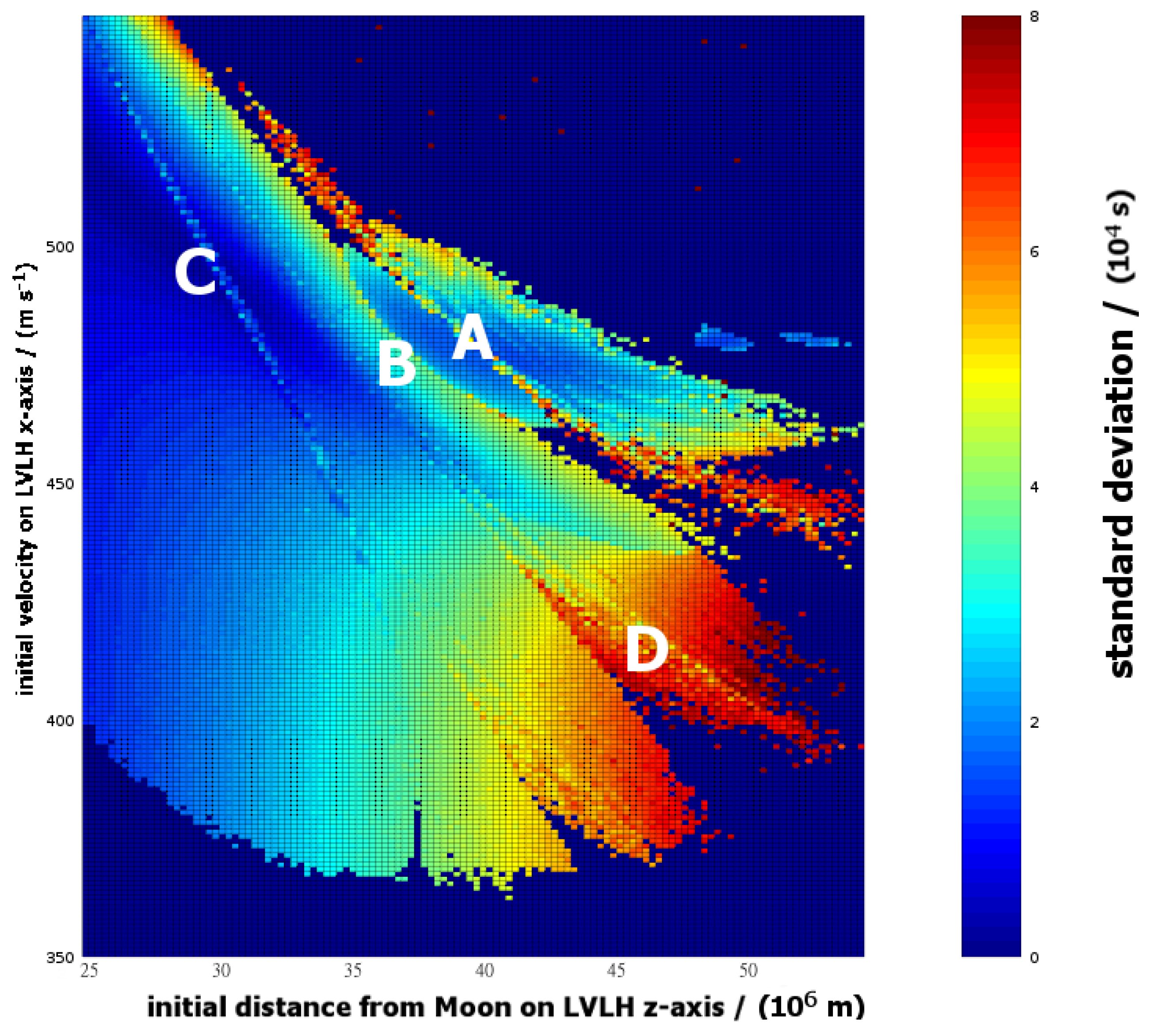
- A
- In the region m, m·s there are two regions of low standard deviation and a narrow line of high standard deviation separating them.
- B
- The lower left edge of the stable area described in A shows a sharp boundary (e.g., at m, 470 m·s). It appears almost as though there are two distinct dynamical processes, one in the background over a large range with a relatively large σ, and one with a smaller range and much lower σ that overrides the background process.
- C
- A line of locally high standard deviation cuts through the background from ( m, 550 m·s) to ( m, 450 m·s).
- D
- A line of relatively low standard deviation around ( m, 425 m·s) to ( m, 410 m·s). The finger of stability surrounding this line appears to be associated with a particular resonance (1:5:6). The low standard deviation on the line may be associated with the perfect resonance, and surrounded by states of near-resonance that are also stable.
2.4. Effect of Radiation Pressure
- Very low density, kg·m. This test was intended to confirm whether radiation pressure perturbations could affect the stability of the trajectory.
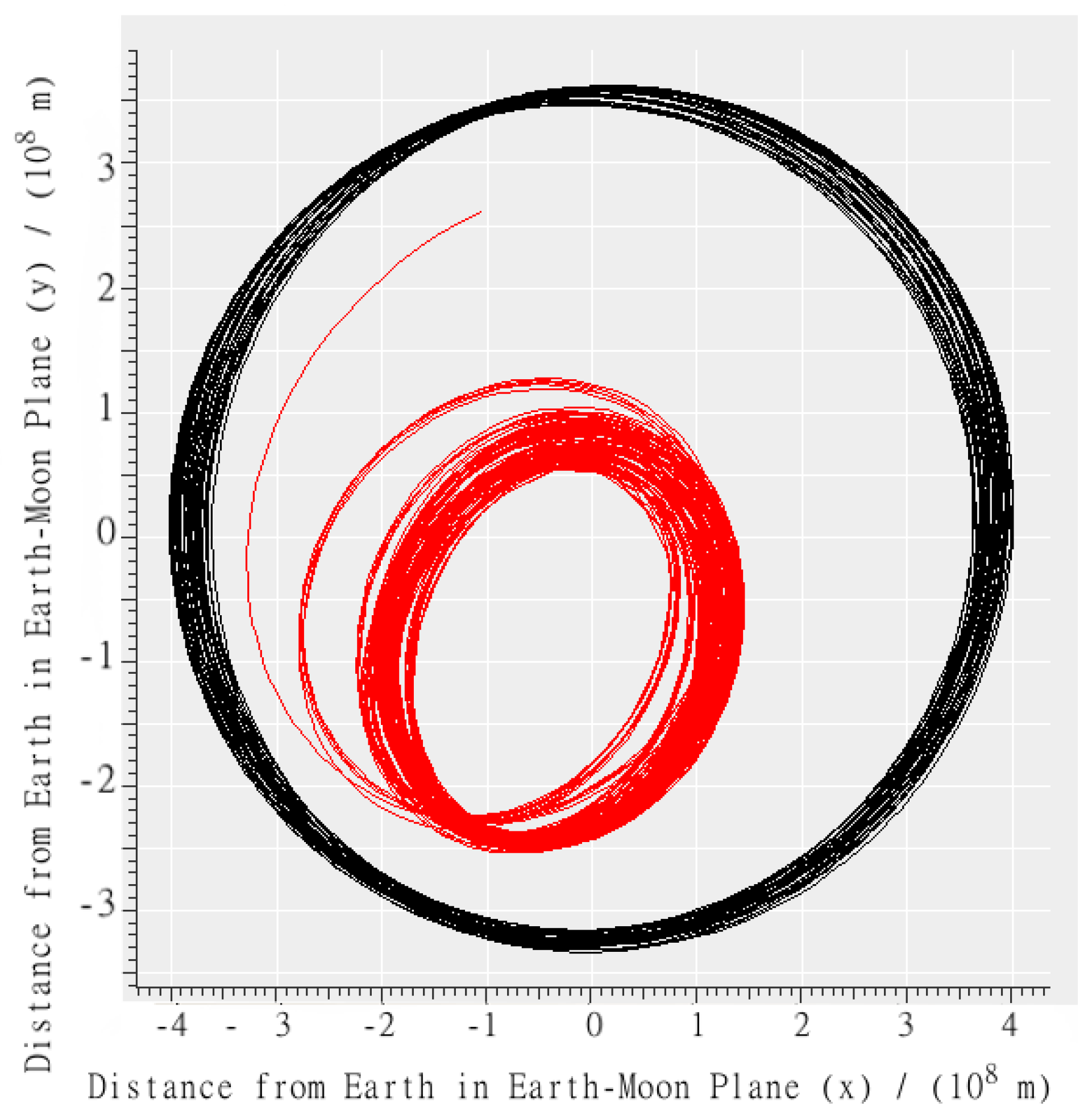
- Low density, kg·m. This is still very low by spacecraft standards, but potentially relevant as a worst-case scenario for vehicles with large deployable arrays that would catch a significant pressure force without adding significantly to the mass. This effect is illustrated in Figure 19.
- Capsule-like density, kg·m. This is—to within an order of magnitude—comparable to a typical spacecraft capsule but still an order of magnitude below that of base materials. This effect is illustrated in Figure 20.
2.4.1. Very Low Density
2.4.2. Low Density
2.4.3. Capsule-Like Density
2.5. Detailed Study of the High-Altitude Stable Region
3. Conclusions
3.1. Significance of Resonances
3.2. Addition of Perturbations
3.3. Access to DROs
Acknowledgments
Conflicts of Interest
References
- O’Campo, C.A.; Rosborough, G.W. Transfer Trajectories for Distant Retrograde Orbiters of the Earth; Recon Technical Report A 95:81418 1993; NASA STI: Hampton, VA, USA, 1993; 0065-3438pp. 1177–1200.
- Hénon, M. Numerical exploration of the restricted problem. VI. Hill’s case: Non-periodic orbits. Astron. Astrophys. 1970, 9, 24–36. [Google Scholar]
- Conte, D.; Di Carlo, M.; Ho, K.; Spencer, D.B.; Vasile, M. Earth-Mars Transfers through Moon Distant Retrograde Orbit. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Vail, CO, USA, 9–13 August 2015.
- Ming, X.; Shijie, X. Exploration of distant retrograde orbits around Moon. Acta Astronaut. 2007, 65, 853–860. [Google Scholar] [CrossRef]
- Tan, M.; Zhang, K.; Lv, M.; Xing, C. Transfer to long term distant retrograde orbits around the Moon. Acta Astronaut. 2014, 98, 50–63. [Google Scholar]
- Welch, C.M.; Parker, J.S.; Buxton, C. Mission Considerations for Transfers to a Distant Retrograde Orbit. J. Astronaut. Sci. 2015, 62, 101–124. [Google Scholar] [CrossRef]
- Bezrouk, C.; Parker, J. Long Duration Stability of Distant Retrograde Orbits. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference, San Diego, CA, USA, 4–7 August 2014.
- Jackson, A.A.; Thebeau, C.D. JSC Engineering Orbital Dynamics Top Level Document; NASA Technical Report JSC-61777-docs; National Aeronautics and Space Administration: Houston, TX, USA, 2012.
- Radhakrishnan, K.; Hindmarsh, A.C. Description and Use of LSODE, the Livermore Solver for Ordinary Differential Equations; NASA Reference Publ. 1327; National Aeronautics and Space Administration: Houston, TX, USA, 1993.
- Hammen, D.; Turner, G. JSC Engineering Orbital Dynamics Integration Model; NASA Technical Report JSC-61777-utils/integration; National Aeronautics and Space Administration: Houston, TX, USA, 2012.
- Berry, M.M.; Healy, L.M. Implementation of Gauss-Jackson integration for orbit propagation. J. Astronaut. Sci. 2004, 52, 331–357. [Google Scholar]
- Spencer, A.; Morris, J. JSC Engineering Orbital Dynamics Rotation, Nutation, and Precession Model; NASA Technical Report JSC-61777-environment/RNP; National Aeronautics and Space Administration: Houston, TX, USA, 2012.
- Bond, V.R. The RNP Routine for the Standard Epoch J2000; NASA Technical Report NASA:JSC-24574; National Aeronautics and Space Administration: Houston, TX, USA, 1990.
- Murray, C.D.; Dermott, S.F. Solar System Dynamics; Cambridge University Press: Cambridge, UK, 1999; ISBN 0-521-57297-4. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initial Position/ m | Initial Velocity/m·s | Average Period/ s | Period Ratio | Possible Resonance |
|---|---|---|---|---|
| 6.00 | 498 | 1.028 | 2.3 | 3:4:7 |
| 6.45 | 507 | 1.105 | 2.13 | 5:6:11, 7:8:15 * |
| 6.95 | 519 | 1.191 | 2.0 | 1:1:2 |
| 7.075 | 529 | 1.274 | 1.85 | 6:5:11, 7:6;13 * |
| 7.725 | 539 | 1.271 | 1.86 | 6:5:11, 7:6;13 * |
© 2016 by the author; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Turner, G. Results of Long-Duration Simulation of Distant Retrograde Orbits. Aerospace 2016, 3, 37. https://doi.org/10.3390/aerospace3040037
Turner G. Results of Long-Duration Simulation of Distant Retrograde Orbits. Aerospace. 2016; 3(4):37. https://doi.org/10.3390/aerospace3040037
Chicago/Turabian StyleTurner, Gary. 2016. "Results of Long-Duration Simulation of Distant Retrograde Orbits" Aerospace 3, no. 4: 37. https://doi.org/10.3390/aerospace3040037
APA StyleTurner, G. (2016). Results of Long-Duration Simulation of Distant Retrograde Orbits. Aerospace, 3(4), 37. https://doi.org/10.3390/aerospace3040037