3.2. Tangential Loitering Path Planner
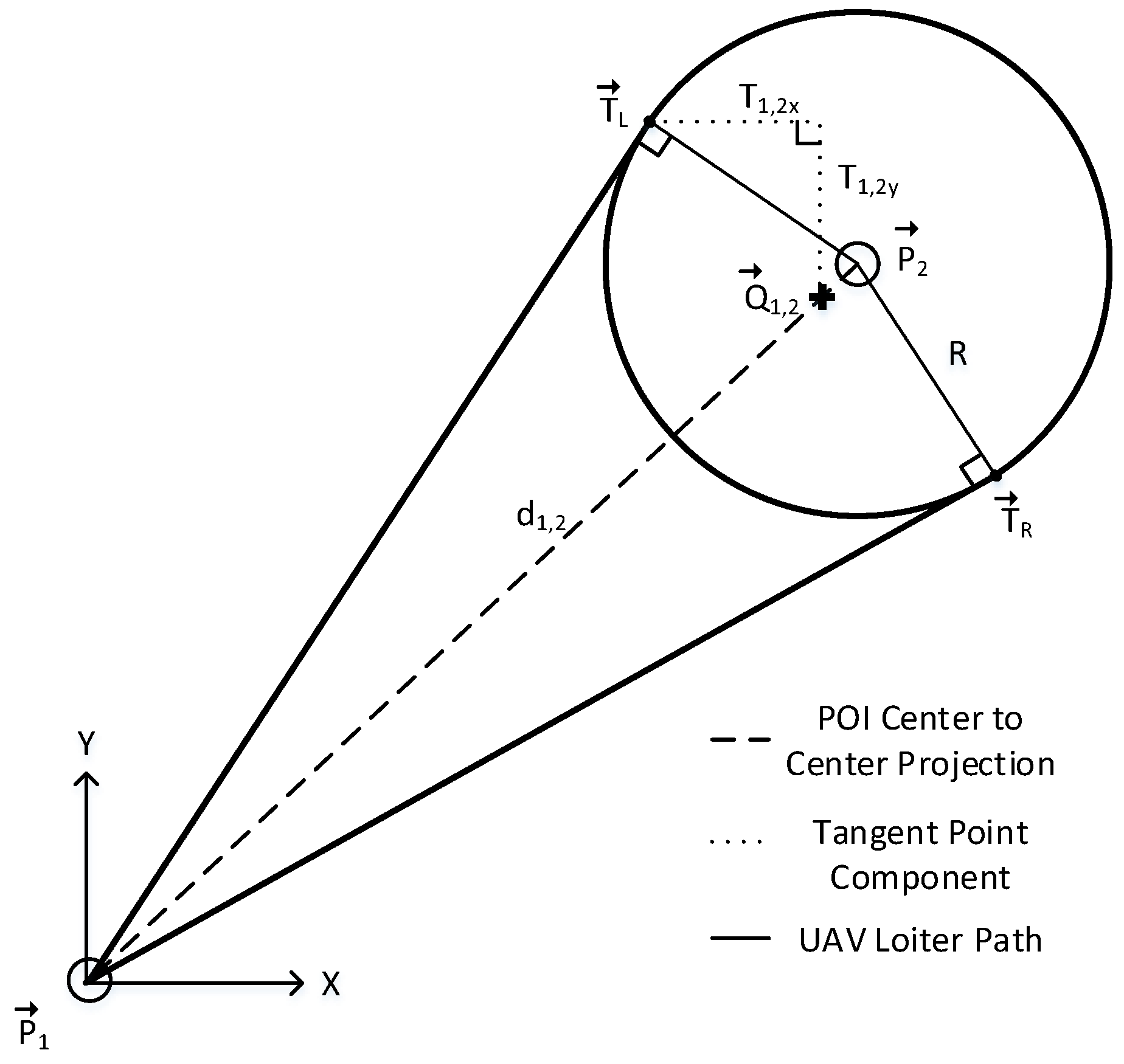
A secondary loitering path planning method called the Tangential Loitering Path Planner (TLPP) was sought to enable an aircraft to directly enter and depart a loiter path via tangent points. TLPP was an extension of the fly through and loiter path planner; however, it eliminated the necessity to travel an additional path to enter the loiter path. The algorithm first determined whether to enter the first AOI in a CW of CCW direction. This was determined in the same manner as the fly through and loiter path planner by checking the position of the next AOI relative to the current AOI. Once the direction was established, the algorithm calculated the coordinates of a point that was both the offset from the AOI and tangent to the aircrafts current position and allowed the aircraft to enter the path in the intended CW or CCW direction and can be seen illustrated in
Figure 7. This figure shows the starting point as POI 1 and the center of the AOI as POI 2 with the AOI loiter path at a radius of
R. The tangent point to the left can then be seen as
and the tangent point to the right can be seen as
. The process by which the tangent points are determined is summarized in Equation (
1) through Equation (
7).
Following with the POI configuration presented in
Figure 7, the position vector of the POIs,
and
, are expressed in the form shown in Equation (
1):
The first step in determining the tangential entry points along the AOI perimeter was to calculate the difference between
and
, for which the operation is shown in Equation (
2):
where
is the 2D position vector of POI 1 and
is the 2D position vector of POI 2. Taking the difference between position vectors,
and
, allowed for the determination of tangent points relative to the positions of both POIs in succeeding steps. Next, the Euclidean distance between
and
was found by taking the square root of the dot product, seen in Equations (
3) and (
4):
yields the distance between the two POIs, where
is the distance from
and
squared. In order to obtain the positions of the left and right tangential entry points on the perimeter of AOI 2 from the direction POI 1, a geometric reference point,
, was established between POI 1 and POI 2 via Equation (
5).
The displacement required to find the tangent point on the AOI perimeter from the direction of POI 1,
, was then calculated in Equation (
6):
where
R is the AOI radius and
r is the turning radius of the UAV. Lastly, the position of the left and right tangential entry points,
and
, were calculated using Equation (
7), wherein the displacement was added to and subtracted from the established geometric reference point for the right and left tangent points, respectively. The left and right tangent points are symmetric about the line
.
where
is a geometric reference point relative to
and
, and
is the displacement measured from
to tangent of AOI relative to
and
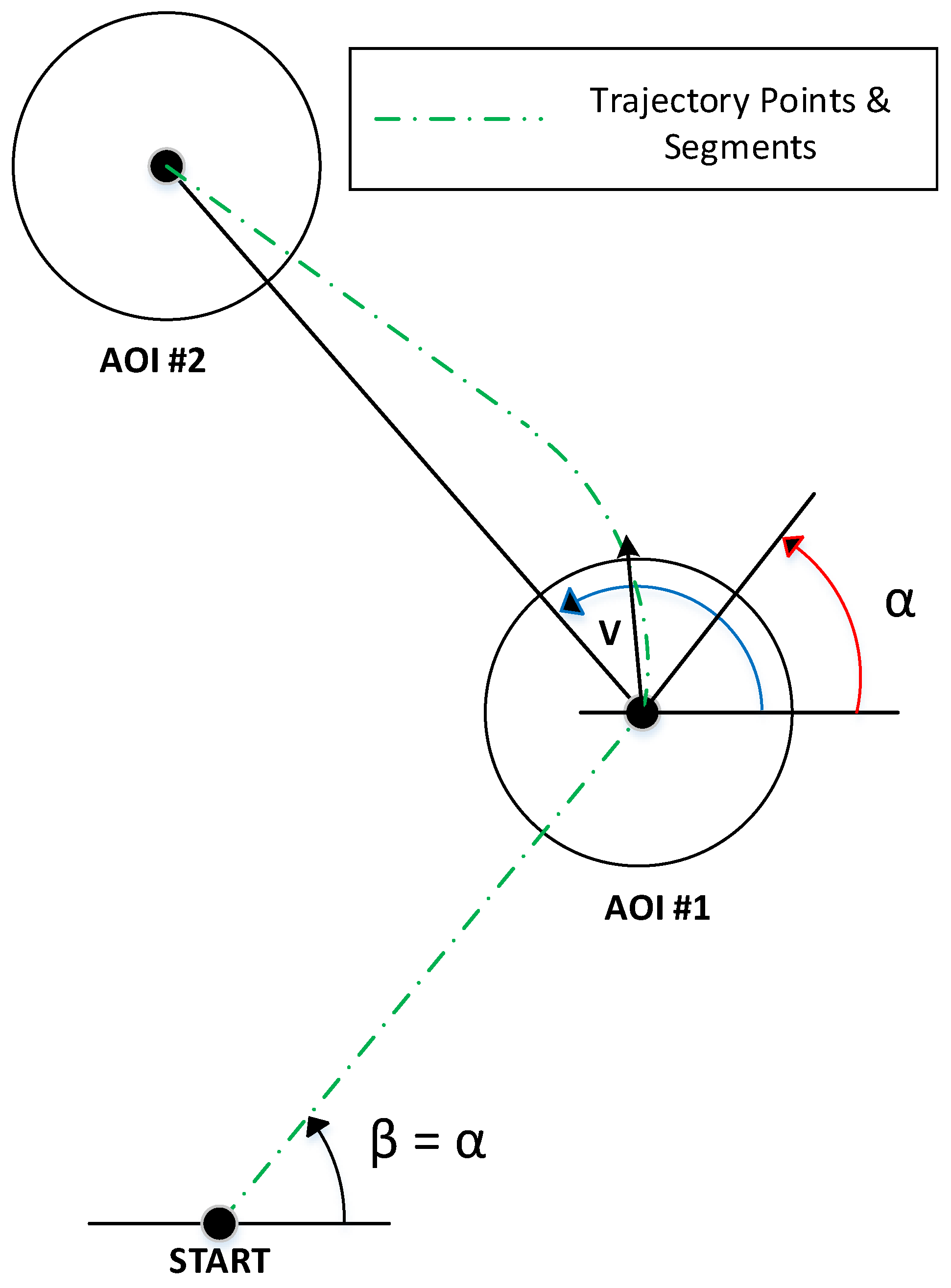
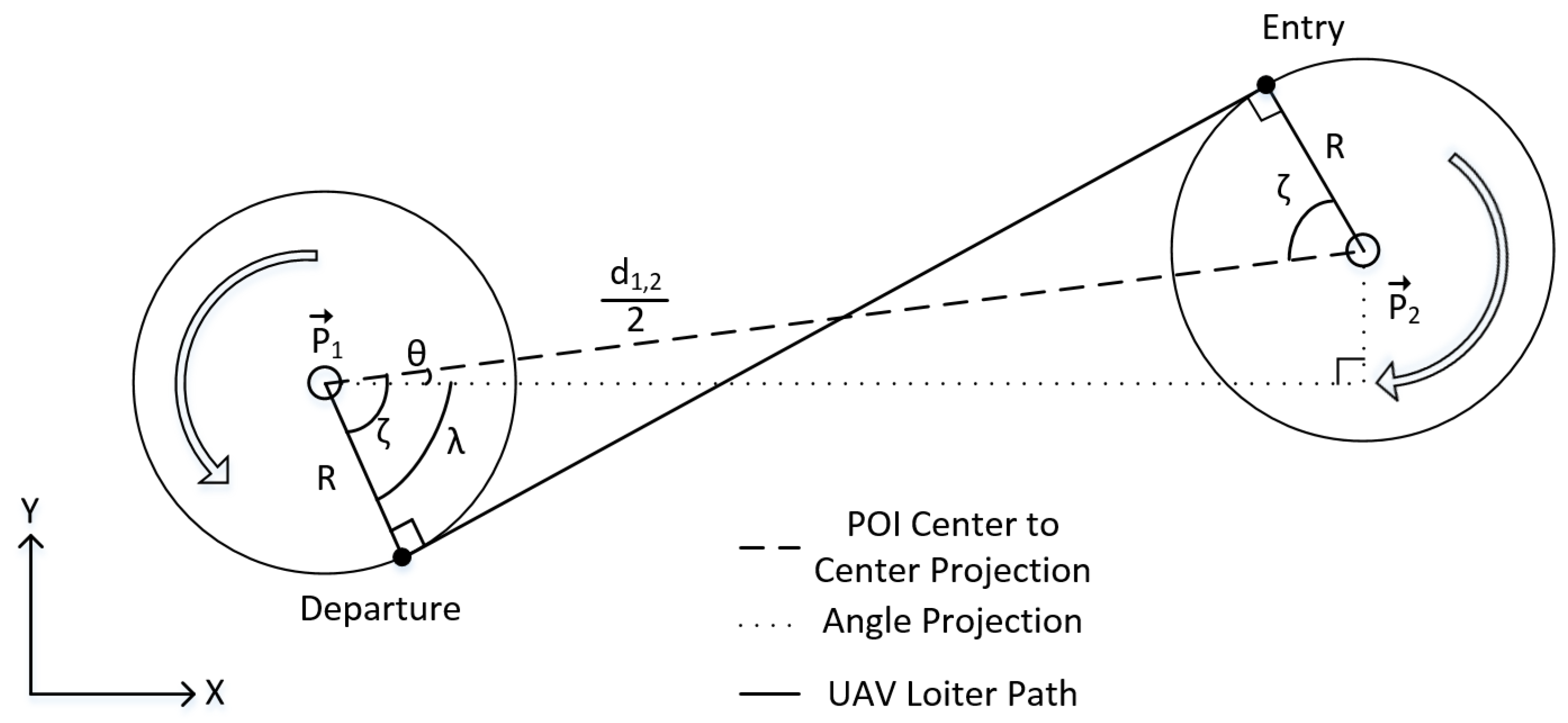
. The bearing angle required to reach the tangent point was calculated using the current heading of the aircraft assuming that it was initially inbound to the center of the AOI. Straight path segments were then generated to reach this point followed by a loiter path in the intended CW or CCW direction. Upon completing the loiter path, the algorithm calculated the set of inner tangent points between the current loiter path and the loiter path around the next AOI. One of the points in the set represented the departure point along the current loiter path direction and the other represents the entry point along the next loiter path direction. Assigning the departure point in this way allowed for additional coverage time of the current AOI before proceeding in a straight path to the next loiter path. An example of the inner tangent departure calculation is presented in
Figure 8 in which the aircraft is departing from the current loiter path around POI 1 in a CCW direction and entering the next loiter path around POI 2 in a CW direction.
The departure and entry point are determined by executing the following steps in reference to the POI geometry presented in
Figure 8, wherein the 2D position vectors of POI 1 and 2 are expressed as before in Equation (
1). Similarly, the distance between the two POIs is found using Equations (
2)–(
4). The bearing angle off of the horizontal between between POI 1 and 2,
, was determined by taking the inverse tangent of the absolute value of the Y and X values of
. The calculation of
is shown in Equation (
8) and the geometry is represented by angle projection lines in
Figure 8:
where
is the difference between position vectors
and
. The departure angle between
and
r about point
produced a path that bisected the line
, yielding two similar right triangles and an equivalent entry angle into the loiter about
. From the right triangle geometry that is consistent with tangential entry and departure, the tangential departure/entry angle was calculated in Equation (
9):
where
R is the AOI radius and
is the distance between POI 1 and POI 2. The sum of these two angles,
and
is taken in Equation (
10), which yielded the tangential departure/entry angle from the horizontal, as shown in
Figure 8:
where
is the tangential departure/entry angle from POI 1 to POI 2 and
is the bearing angle between POI 1 and POI 2. With the tangential departure/entry angle from the horizontal,
, the position of departure and entry points from the respective POI were determined through Equations (
11) and (
12):
where
is the X coordinate of POI 1,
is the Y coordinate of POI 1,
is the X coordinate of POI 2,
is the Y coordinate of POI 2,
R is the radius of AOI, and
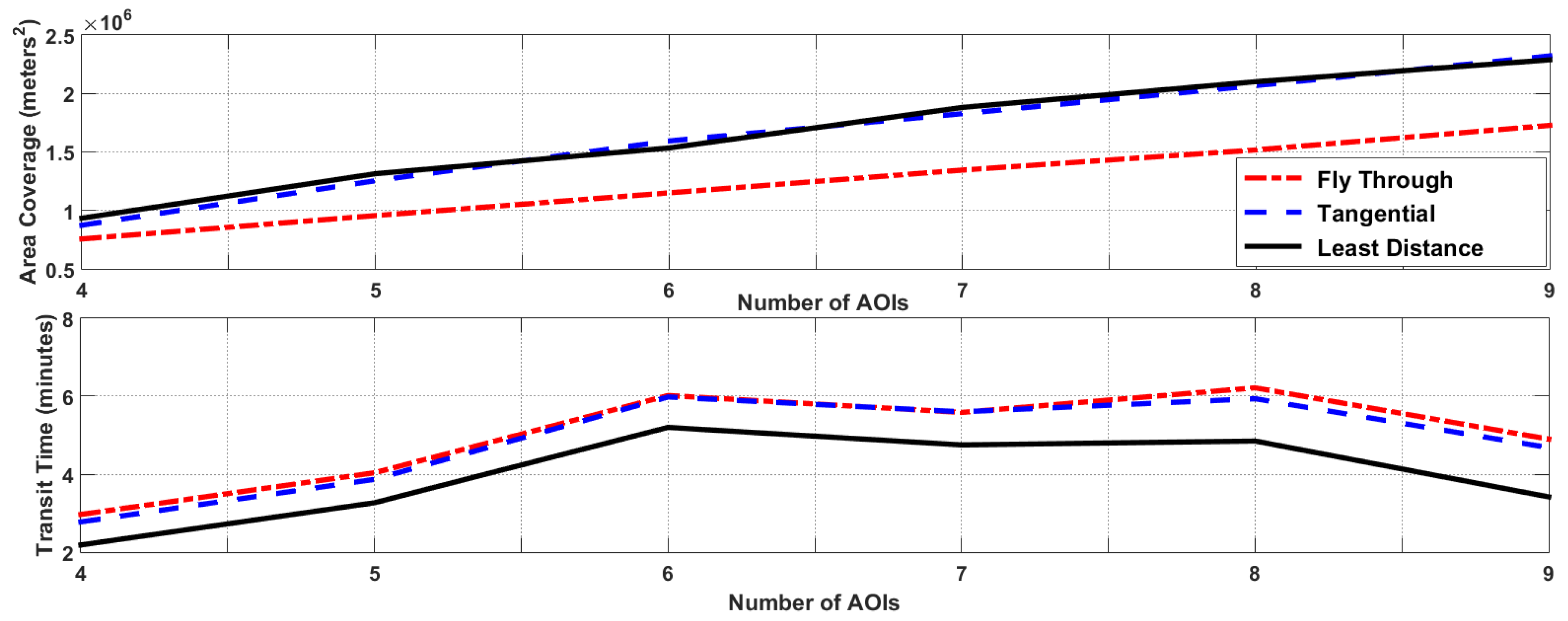
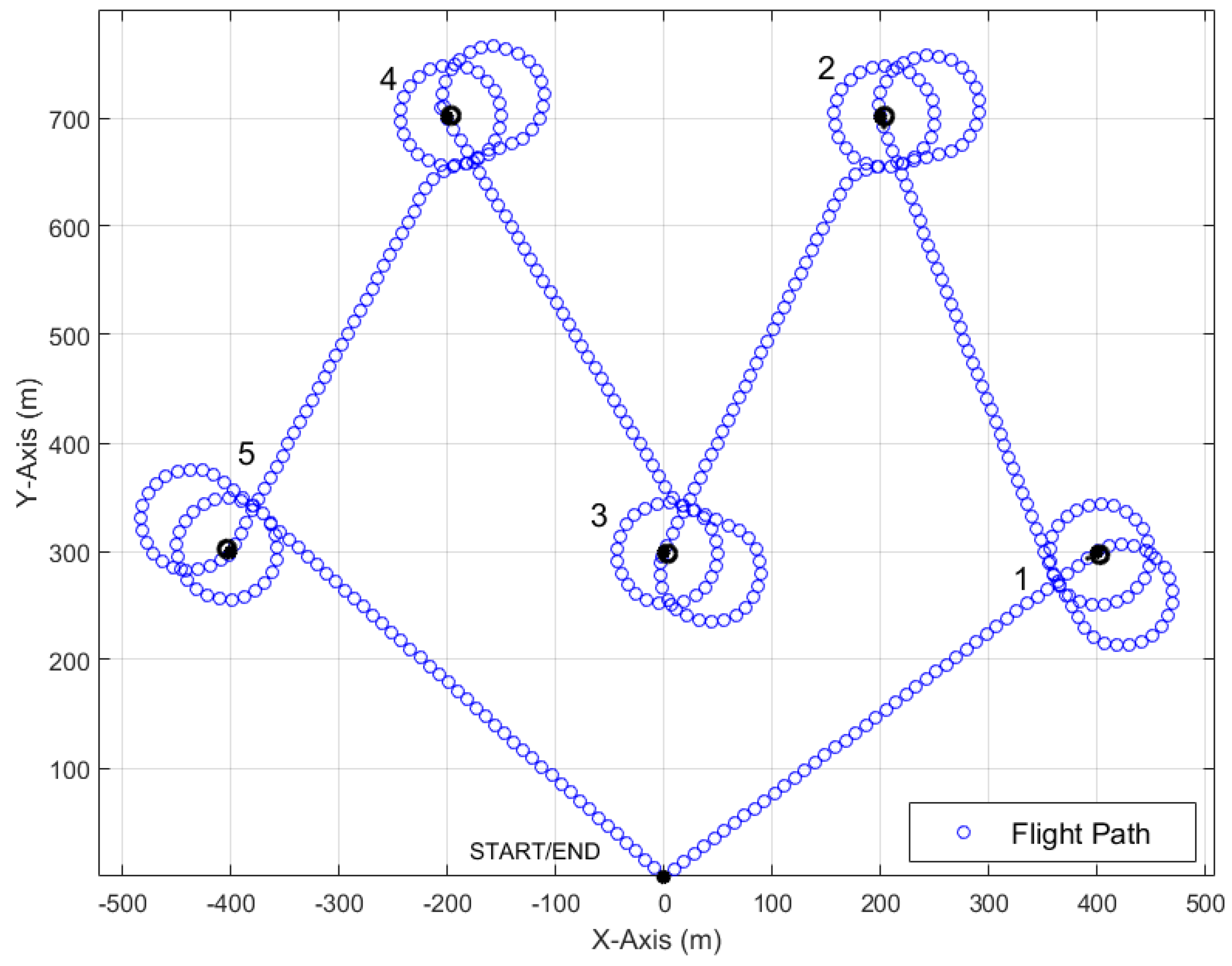
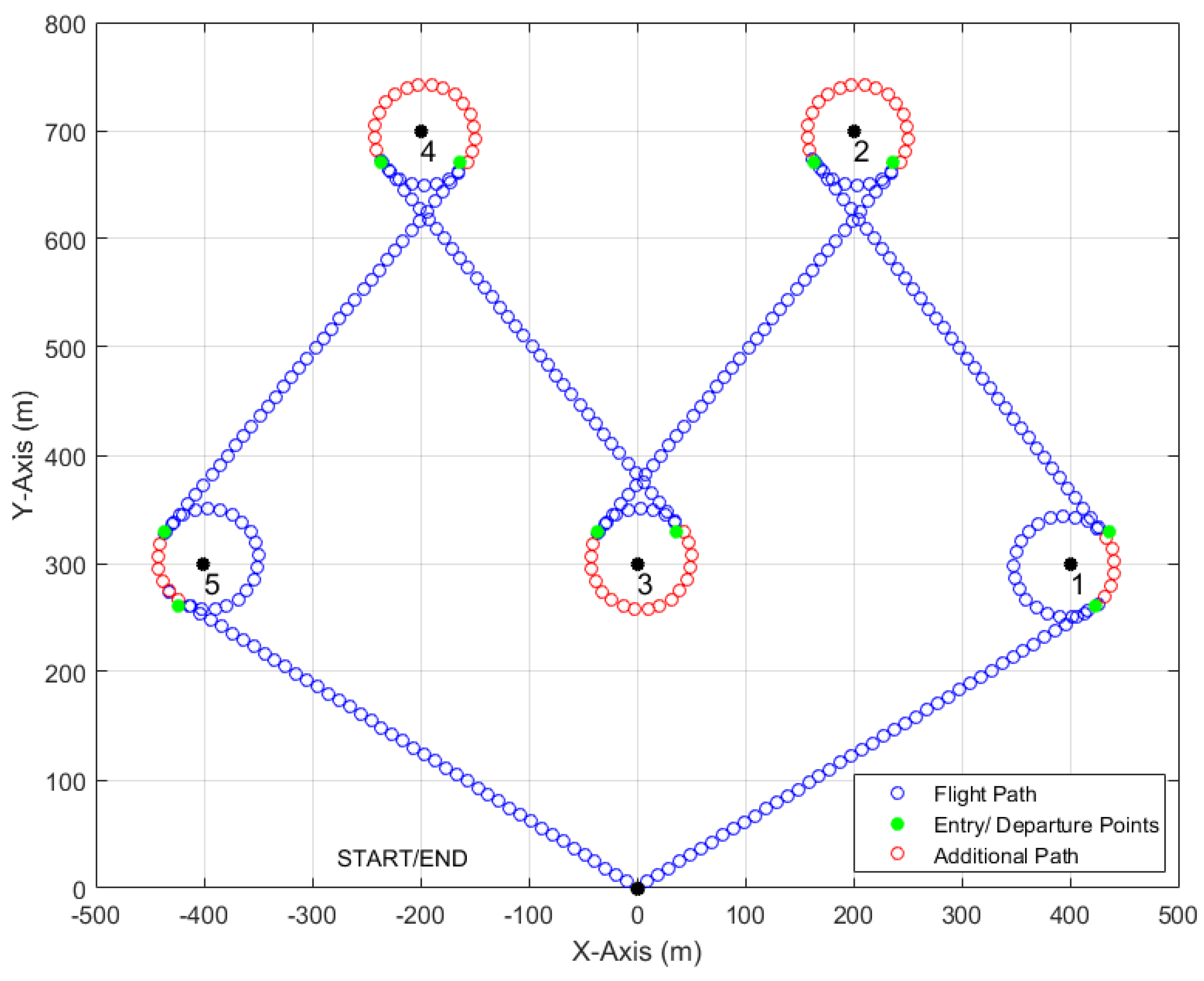
is the tangential departure/entry angle off of horizontal between POI 1 and POI 2. The tangential loitering path method was capable of successfully generating paths for an aircraft that avoided extra or wide turns associated with the Fly Through loitering method. A key feature of the TLPP was that the aircraft entered the next loiter path in the opposite CW or CCW direction from the previous loiter path, meaning that the determination of CW or CCW loiter path entry was only necessary for the first AOI. This iterative process was repeated until all AOIs were visited and the aircraft reached the end point. An example of the TLPP is shown in
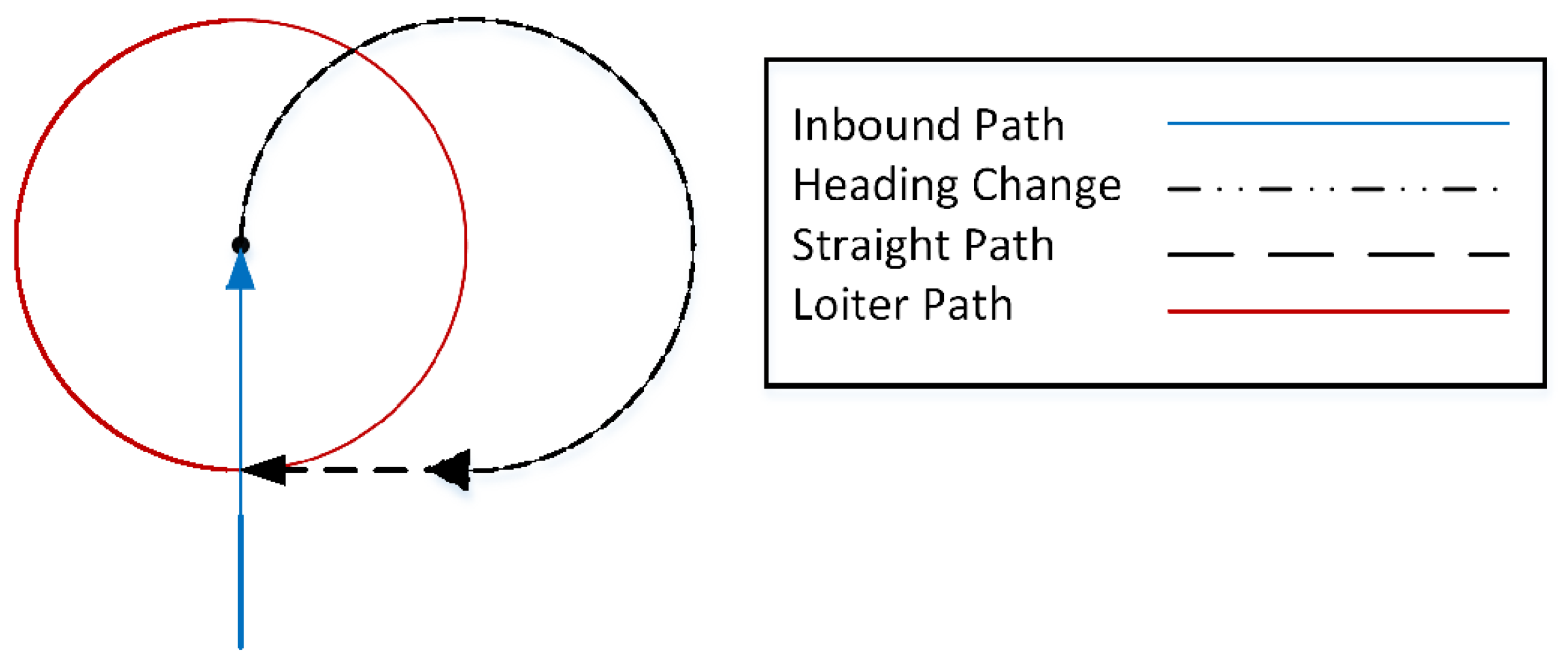
Figure 9 for five POIs. Note that the TLPP did not have any extra or unnecessary turning outside of the AOI that was present in the Fly Through method. The tangential point to the first loiter path was calculated and is presented in
Figure 9 as the green point to the lower right of the center of AOI 1. The path then proceeded into a CCW loiter path and, upon completion, followed an additional loiter path denoted in red to the departure point at the upper right of AOI 1. At this point, the heading was in a tangential straight path with the next AOI, which was slotted to execute a CW loiter. This process of tangential entry and departure was repeated until the vehicle reached the end point. TLPP was found to be significantly more effective than that of the Fly Through and loiter method with both reduced overall mission times and increased AOI coverage. Not only did the TLPP method avoid the additional path needed in the Fly Though method, but it was much simpler in terms of navigation and will work best with existing autopilot systems that operate off waypoint navigation.
3.3. Least Distance Loitering Path Planner
Although TLPP yielded smooth entry and departure maneuvers that increased sensor coverage while in proximity of an AOI, it did not follow the shortest or most direct route from one AOI to another.The shortest path between AOIs would simply be to fly along the vector connecting each AOI. In order to further optimize sensor coverage and reduce overall mission duration, a third solution was developed that incorporated both smart loiter entry and departure maneuvers as well as a direct flight path between AOIs, termed the Least Distance Loitering Path Planner (LDLPP).
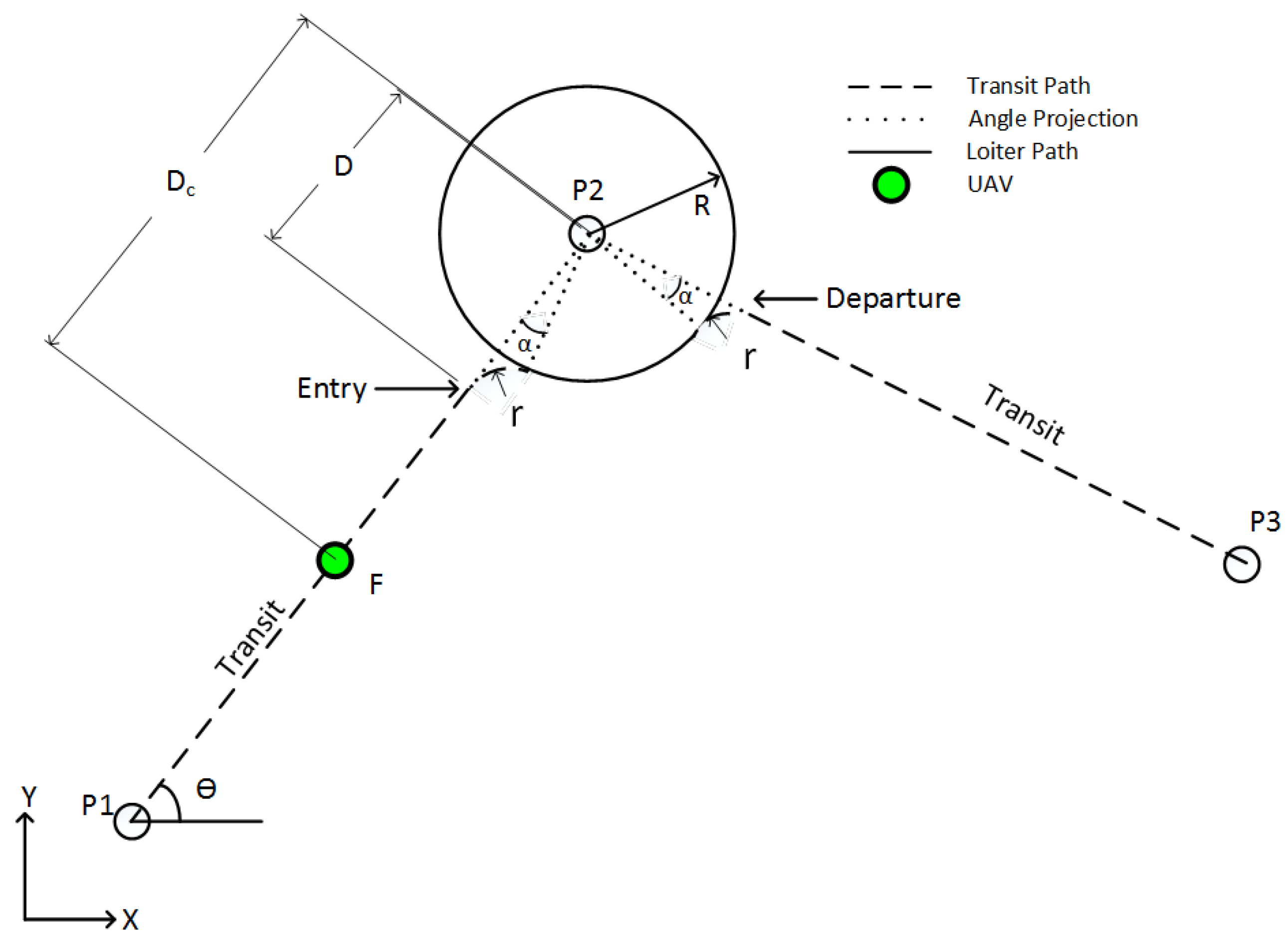
LDLPP consisted of four fundamental maneuvers that ultimately allowed for the overall reduction of transit distances between AOIs. The four maneuvers consisted of transit between AOIs, curved loiter entry, loiter, and curved loiter departure. LDLPP repeated the four fundamental maneuvers in order until the vehicle reached the desired end point. It is important to note that the departure maneuver placed the vehicle on a path directly in line with the next POI rather than on target with the tangent of the next AOI as in the TLPP method.
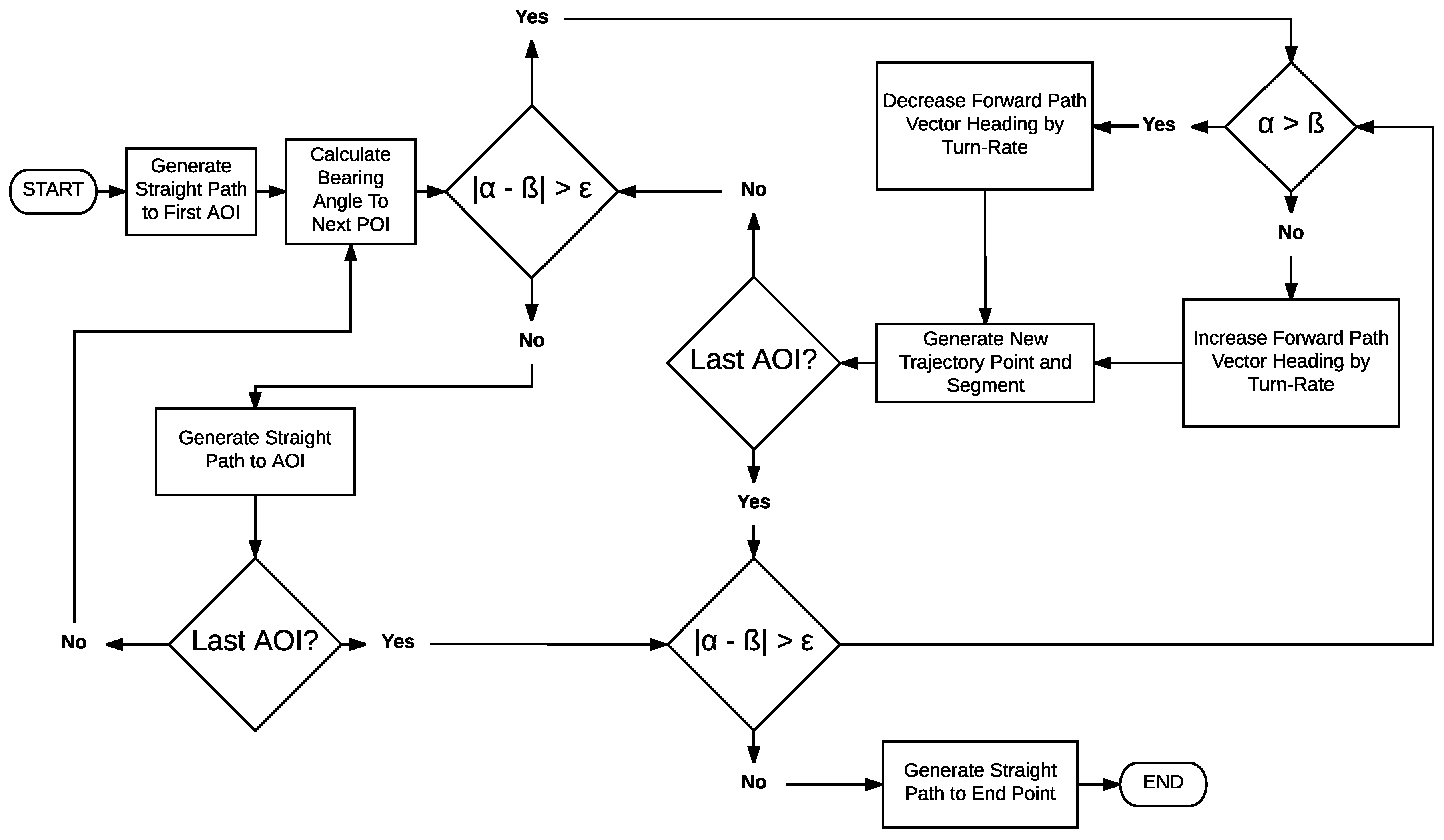
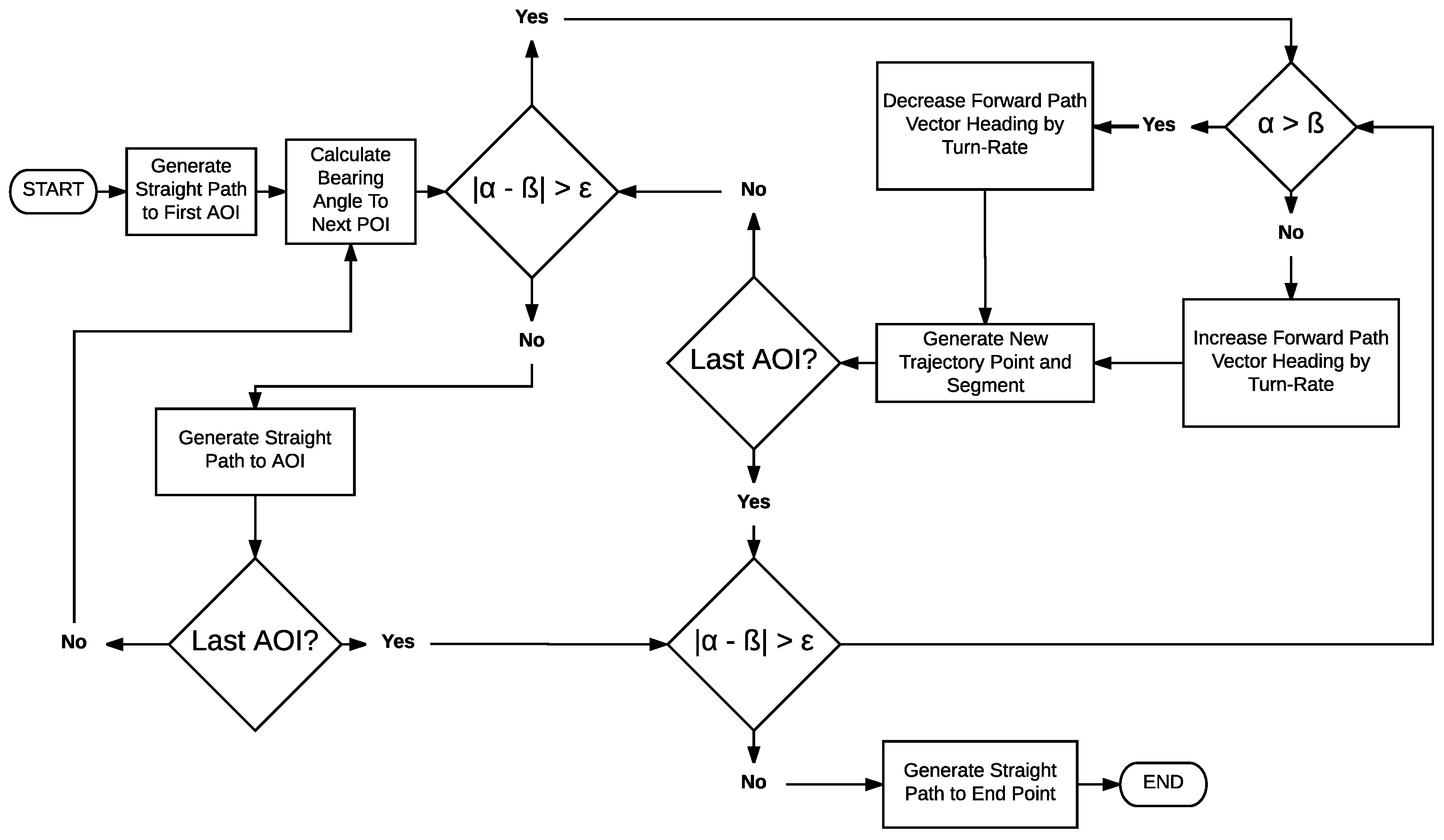
The LDLPP algorithm started by calculating a bearing angle
between a start point and the first POI. The transit maneuver was then initiated by generating straight line segments in the direction of the bearing angle until the UAV reached a predetermined distance
from the POI. When the UAV reached distance
from the POI, the straight line segment transit maneuver was terminated and then the curved entry maneuver was initiated. The curved entry maneuver consisted of turning the UAV at a constant turn rate until the vehicle was directly over the first AOI perimeter. When the UAV was on the AOI’s perimeter, the curved entry maneuver was terminated and the loitering maneuver was initiated by turning the UAV in a CCW direction. The loitering maneuver continued until two conditions were met. The first condition required that the UAV had circled the AOI completely at least once. The second condition compared the angle between the craft, the current POI, and the next POI to a predetermined entry/departure angle
. When the UAV had completed at least one turn and was at
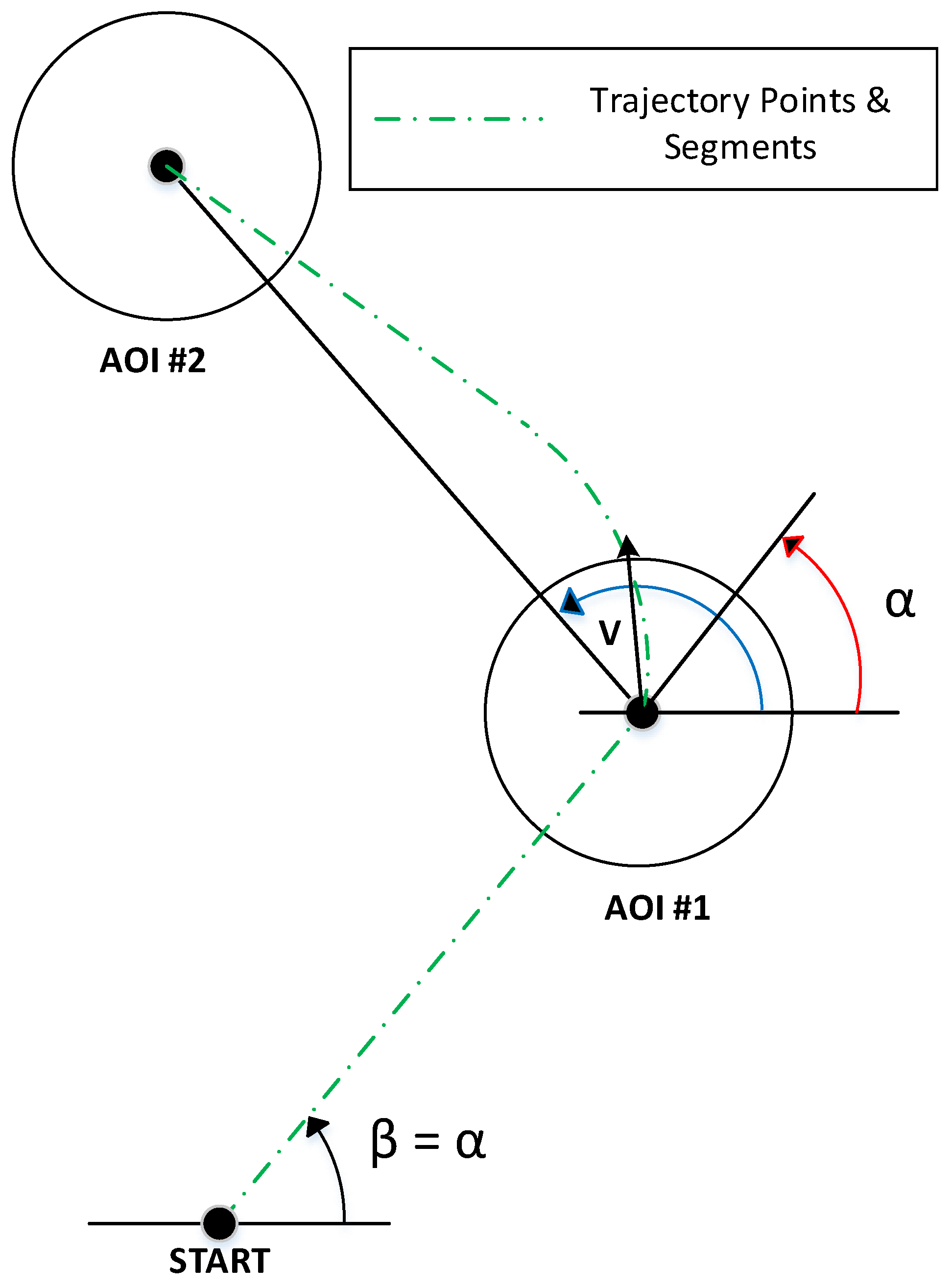
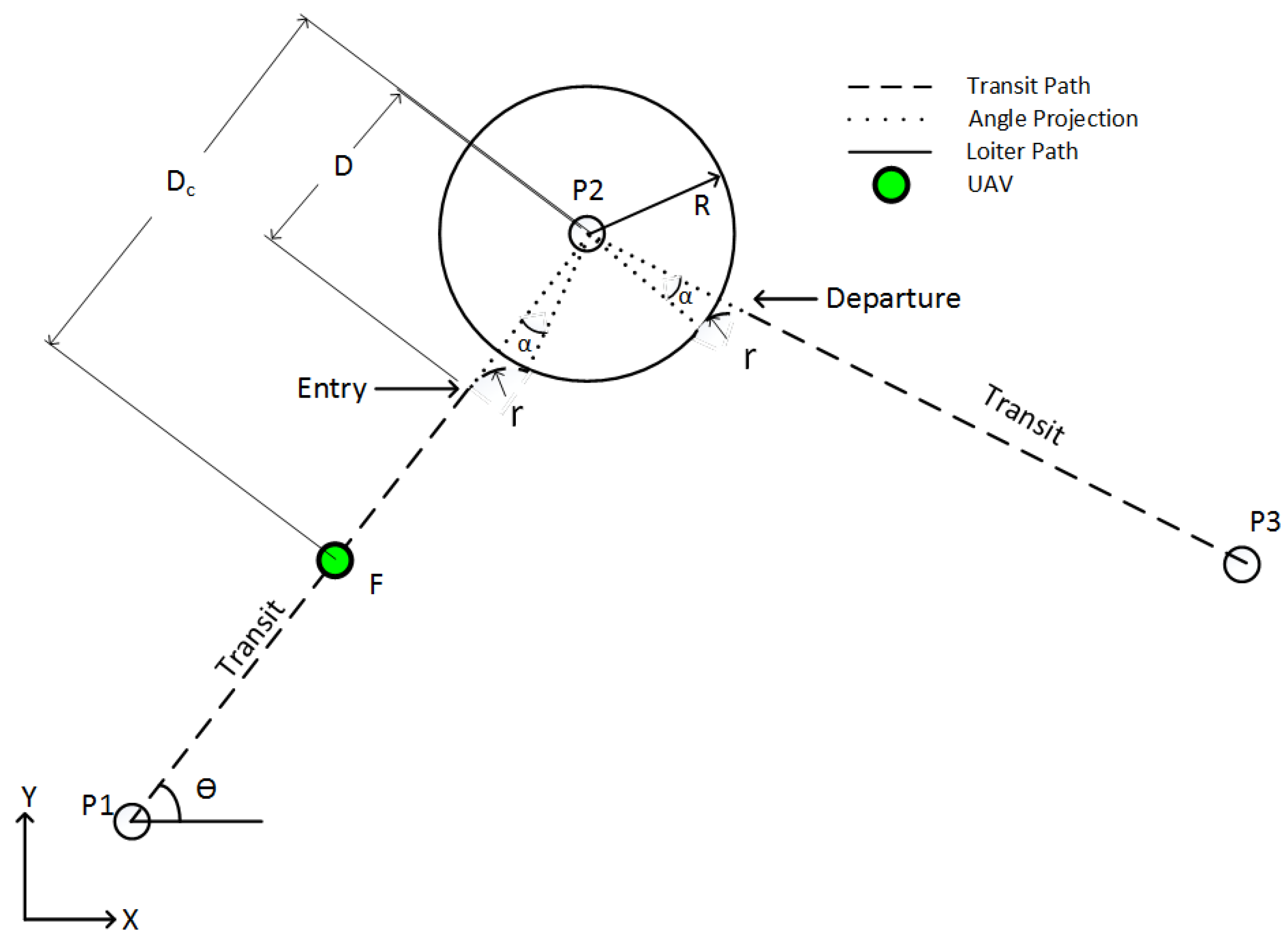
degrees with respect to the current and subsequent POIs, the loiter maneuver was terminated and the CW circular exit turn was initiated. The curved exit turn was performed at the same turn rate as the entry turn. Once the UAV tangentially intercepted the line connecting the current and subsequent POIs, the exit turn was terminated and the LDLPP was restarted, commanding the UAV to transit to the next POI. The LDLPP path for a transit, entry, loiter, exit, and transit set of maneuvers described is shown in
Figure 10 where the transit path is denoted with a dashed line, angle projections are denoted with a dotted line, the loiter path is denoted by a solid line and the vehicle position is marked by a green circle.
In reference to the POI geometry presented in
Figure 10, the three POI positions are expressed in the same notation presented in Equation (
1). The position vector of the UAV is expressed similarly, but in this case it takes the form presented in Equation (
13):
where
is the X coordinate of UAV and
is the Y coordinate of UAV. Note that the position of a UAV, as represented in
Figure 10, is at that of an arbitrary time during the simulation. The bearing angle,
, between POI 1 and POI 2, was then calculated through Equation
8. With the positions of
,
,
,
F, and the bearing angle assigned, the straight line transit maneuver was generated with a slope of
. The entry/departure angle,
, provided the angle at which the UAV flying along the turn radius,
r, would lie tangent to the AOI radius,
R, measured about the next POI. The calculation for which is shown in Equation (
14):
where
R is the radius of the AOI and
r is the turn radius of vehicle. An example of the associated angle projection is shown in
Figure 10. The closing distance was calculated from the current position of the UAV using Equations (
2)–(
4), while the curved entry distance,
, was calculated as a function of the vehicle turn radius,
r, AOI radius,
R and entry/departure angle,
. The straight line transit maneuver was executed until the closing distance of the UAV,
, was equal to the entry distance,
, which is calculated in Equation (
15):
where
R is the radius of the AOI,
r is the turn radius of vehicle, and
is the entry/departure angle.
Once the closing distance,
, was equal to the entry distance,
, the straight line transit maneuver was terminated and a CW turn of constant radius,
r, was initiated. The change in heading throughout the entry turn,
, was tracked in order to determine when the entry turn could be considered complete. Entry turn heading change was calculated by taking the absolute difference of the current heading
and the heading at the start of the entry turn,
, as shown in Equation (
16):
where
is the current heading of UAV and
is the heading of UAV at the start of entry turn. Once the change in heading,
, became equal to the entry/departure angle
, the CW entry turn was terminated and the position of the aircraft was said to be on the perimeter of the AOI.
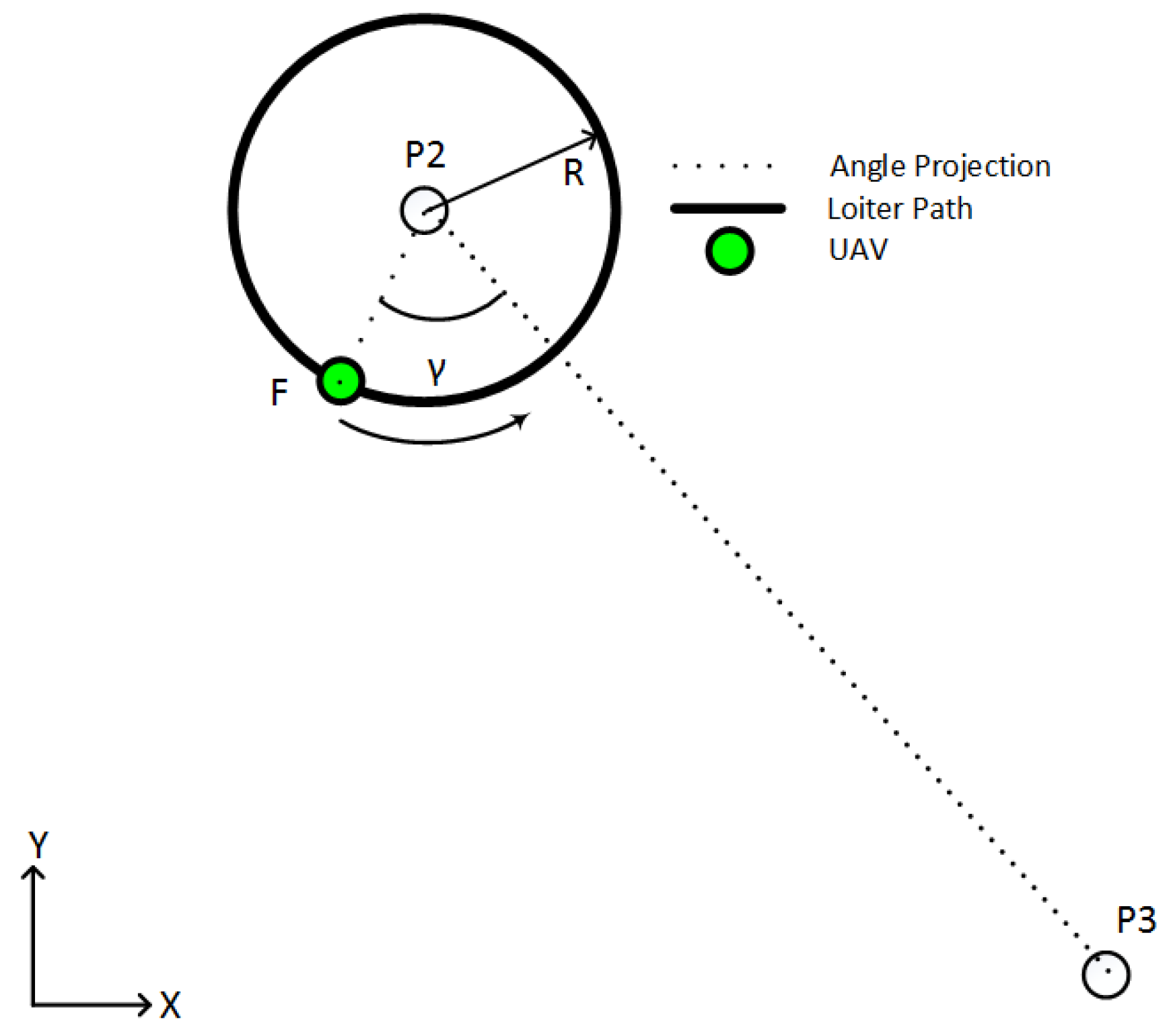
The loiter maneuver was then initiated in a CCW direction with a turning radius equivalent to the radius of the AOI, R, and was executed until two conditions were satisfied. The first condition required that a 360 turn around the perimeter of the AOI be completed, while the second condition required that the angle between the UAV and POI 3 with respect to POI 2 be equal to .
The closing angle,
, followed a similar concept to that of
in which the angle between the UAV and the departure angle with respect to the current POI was tracked around the loiter to determine the instant at which the UAV could exit the loiter in the direction of the next POI. The closing angle between POI 2 and POI 3,
, was calculated by taking the inverse tangent of a quotient containing the absolute value of a determinant and a dot product, shown in Equation (
17):
where
is the UAV position vector,
is the POI 2 position vector, and
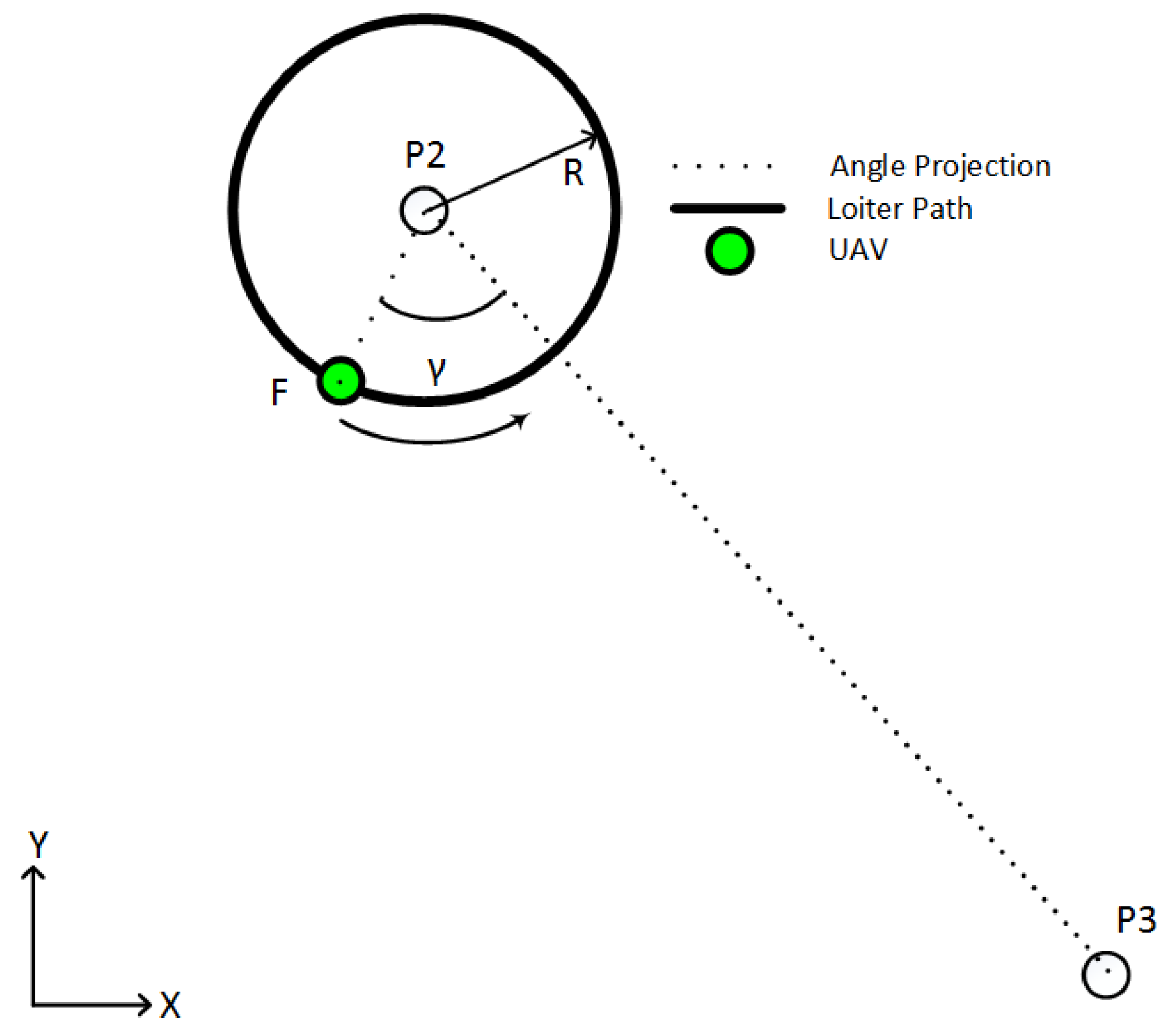
is the POI 3 position vector. The loitering maneuver was terminated and the exit turn was initiated.
Figure 11 presents a scenario wherein the UAV, denoted as F, is assumed to have completed a 360
trip around the AOI and approaches the departure angle from a CCW direction that will align the UAV with POI 3.
Similar to the entry turn, the heading of the UAV throughout the exit turn was tracked using Equation (
16) until the change in the heading angle was equal to the entry/departure angle
. Once equal, the exit turn was terminated and the algorithm returned to the first step, generating straight line segments to the next POI.
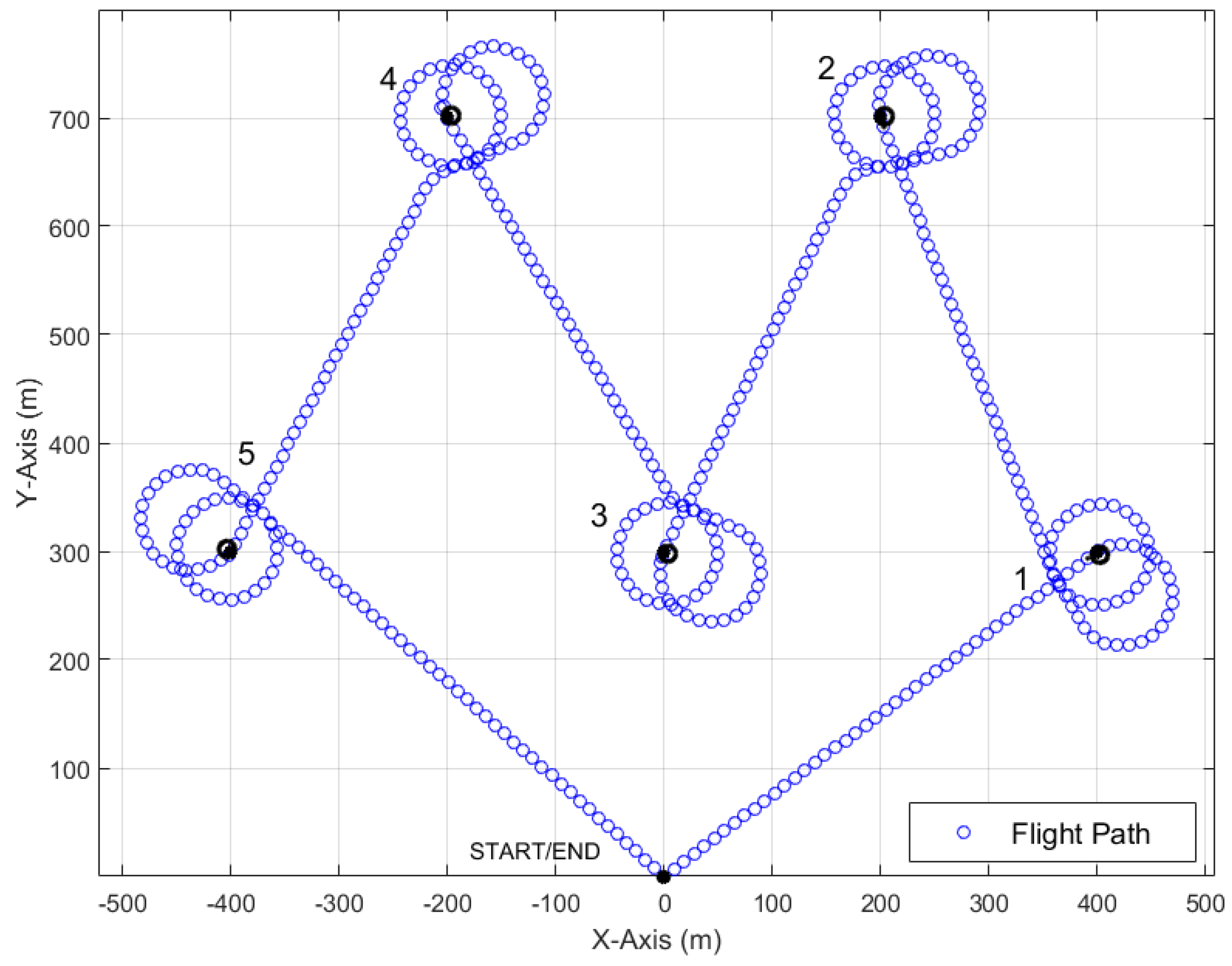
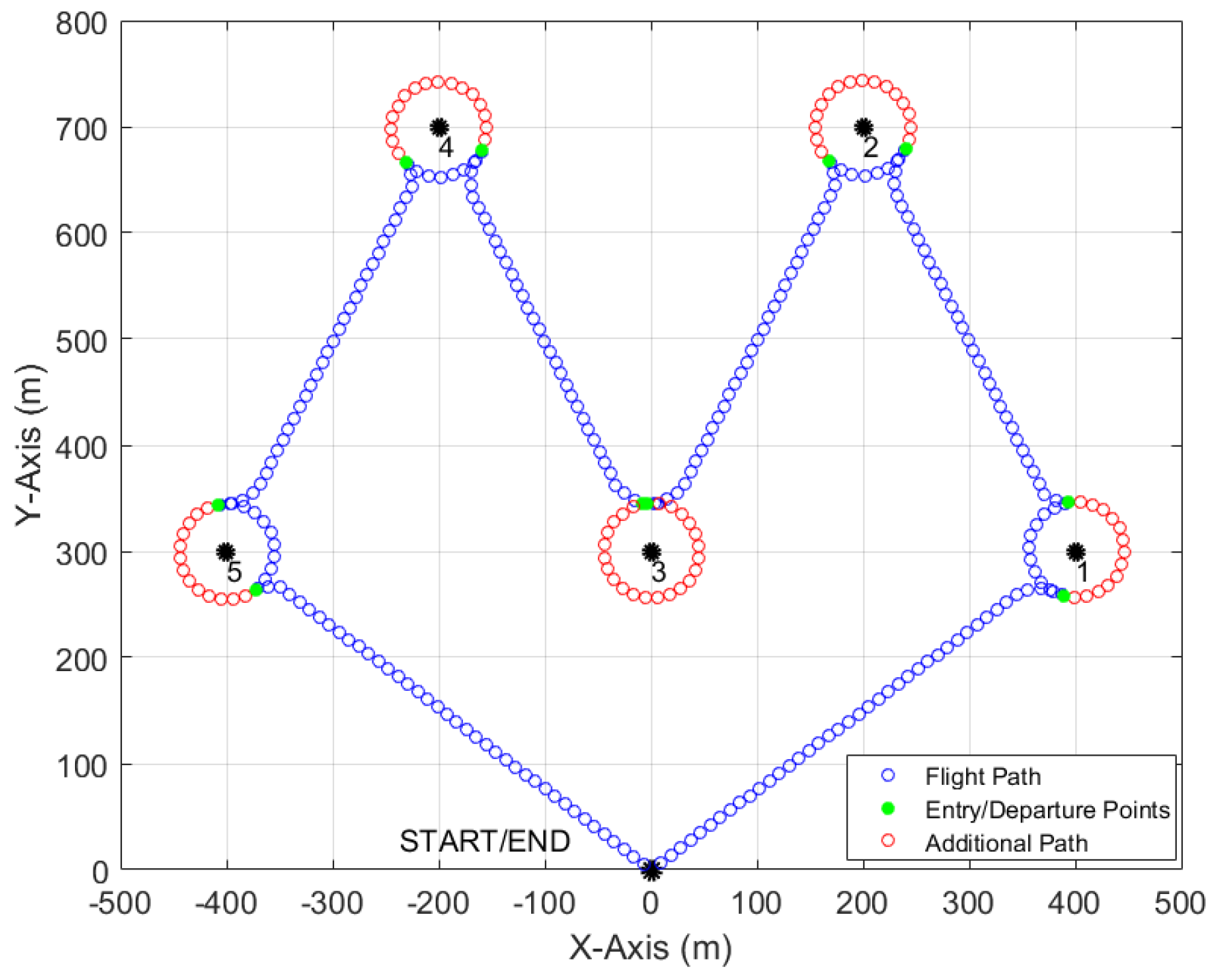
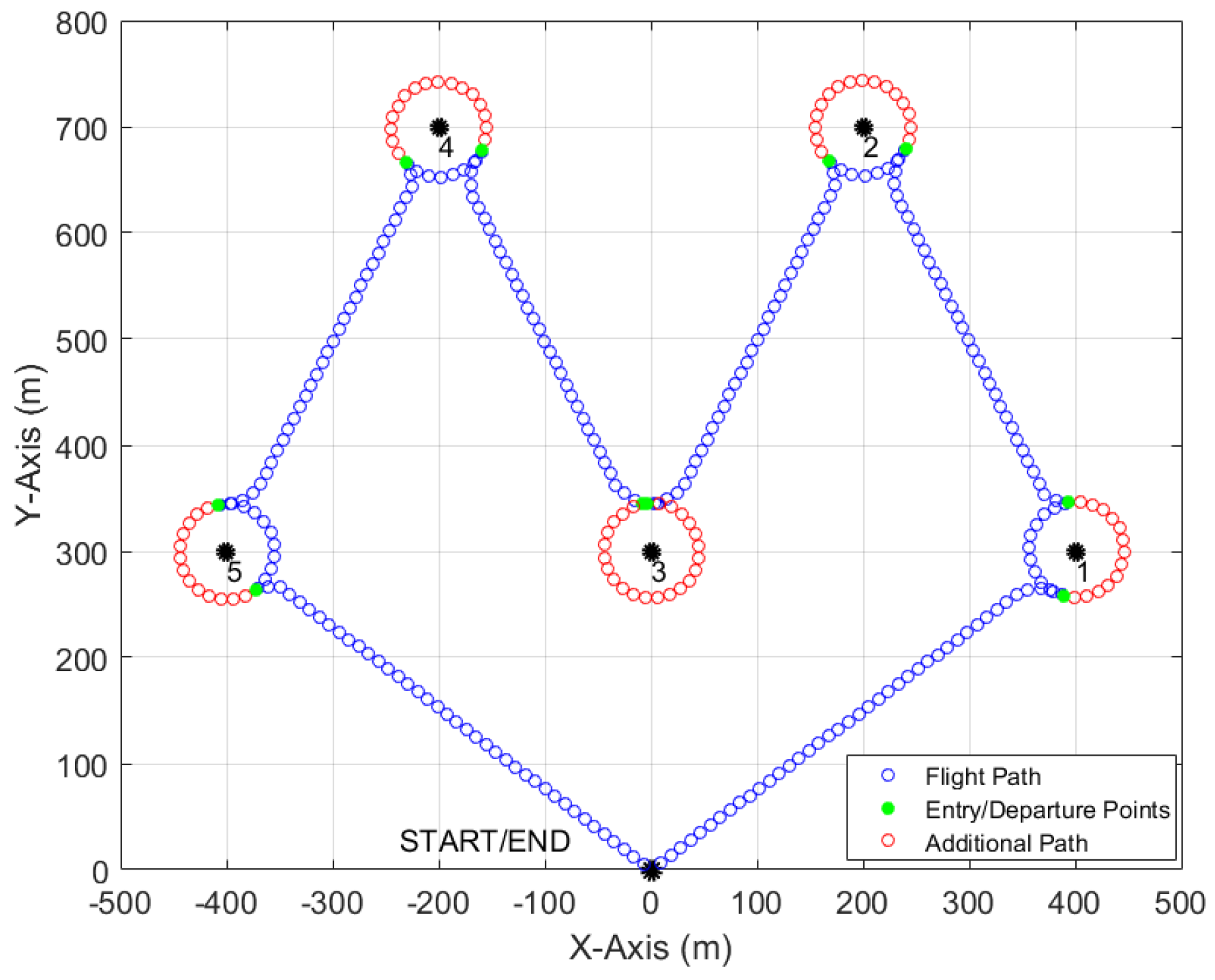
If the next waypoint was a POI, the UAV would begin the transit, entry, loiter, and exit loop over again. If the next waypoint was the endpoint of the simulation, the UAV would simply transit to the endpoint using straight line transit segments. Once the UAV reached the endpoint, the simulation terminated. A five POI simulation utilizing the LDLPP method is presented in
Figure 12, where the UAV starts at (0,0) and surveys five POIs in numerical order before returning to the START/END point.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}