Hybrid Propulsion Systems for Remotely Piloted Aircraft Systems



Abstract
:1. Introduction
2. The Existing Propulsion Systems
2.1. Battery Powered
- propeller,
- electric motor,
- energy source,
- optional gear box,
- electric power converter,
- plugs,
- connectors, and
- optional cooling system.
2.2. Fuel-Cell Powered
- Polymer Electrolyte Membrane fuel cell or Proton Exchange Fuel cell (PEM),
- Direct Methanol Fuel Cells (DMFC),
- Alkaline fuel cells,
- Phosphoric acid fuel cells,
- Molten Carbonate fuel cells, and
- Solid Oxide Fuel Cell (SOFC).
2.2.1. Proton Exchange Fuel Cell
2.2.2. Solid Oxide Fuel Cell
2.2.3. Direct Methanol Fuel Cell
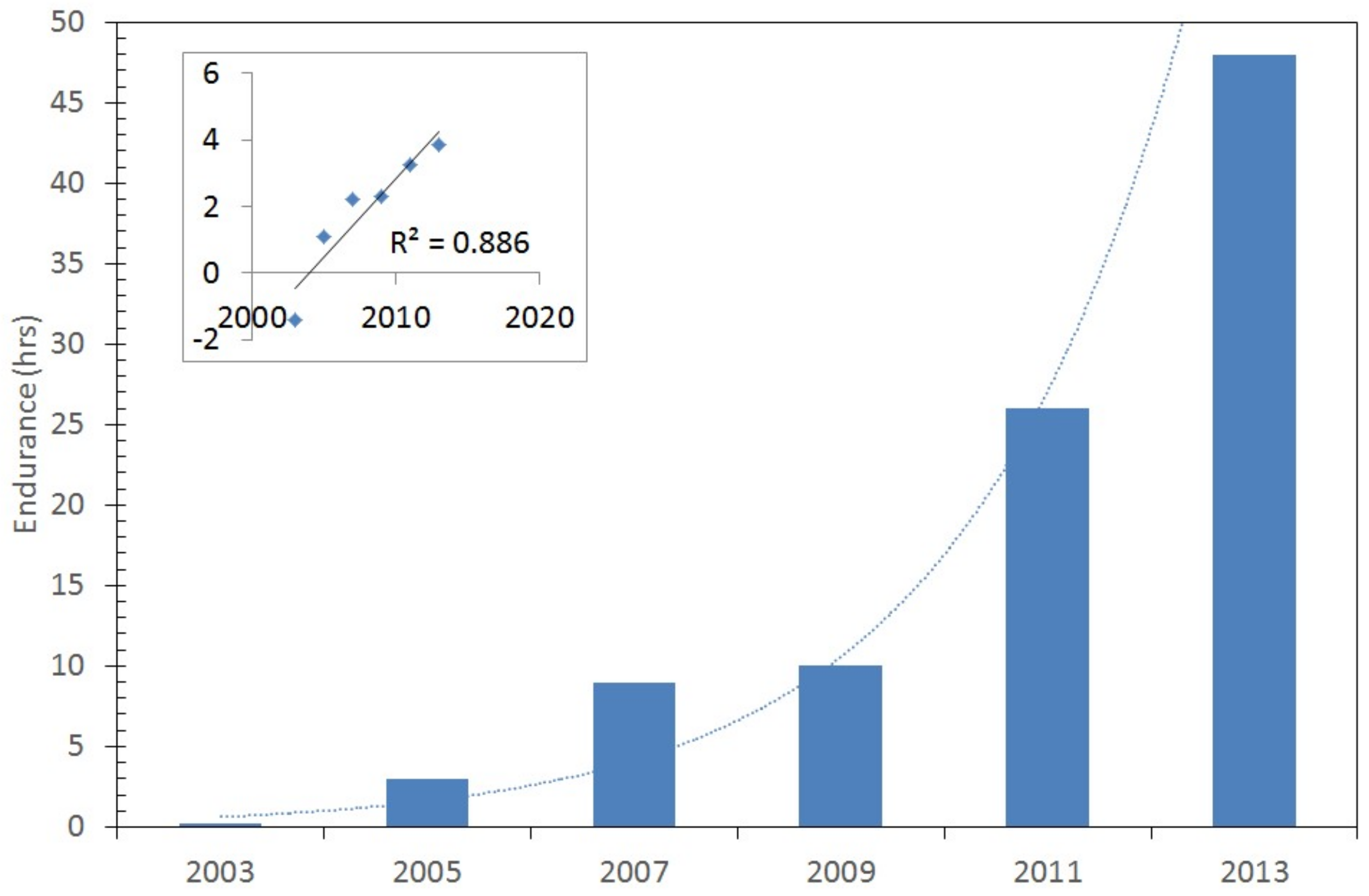
2.2.4. Fuel-Cell Powered RPAS and Endurance
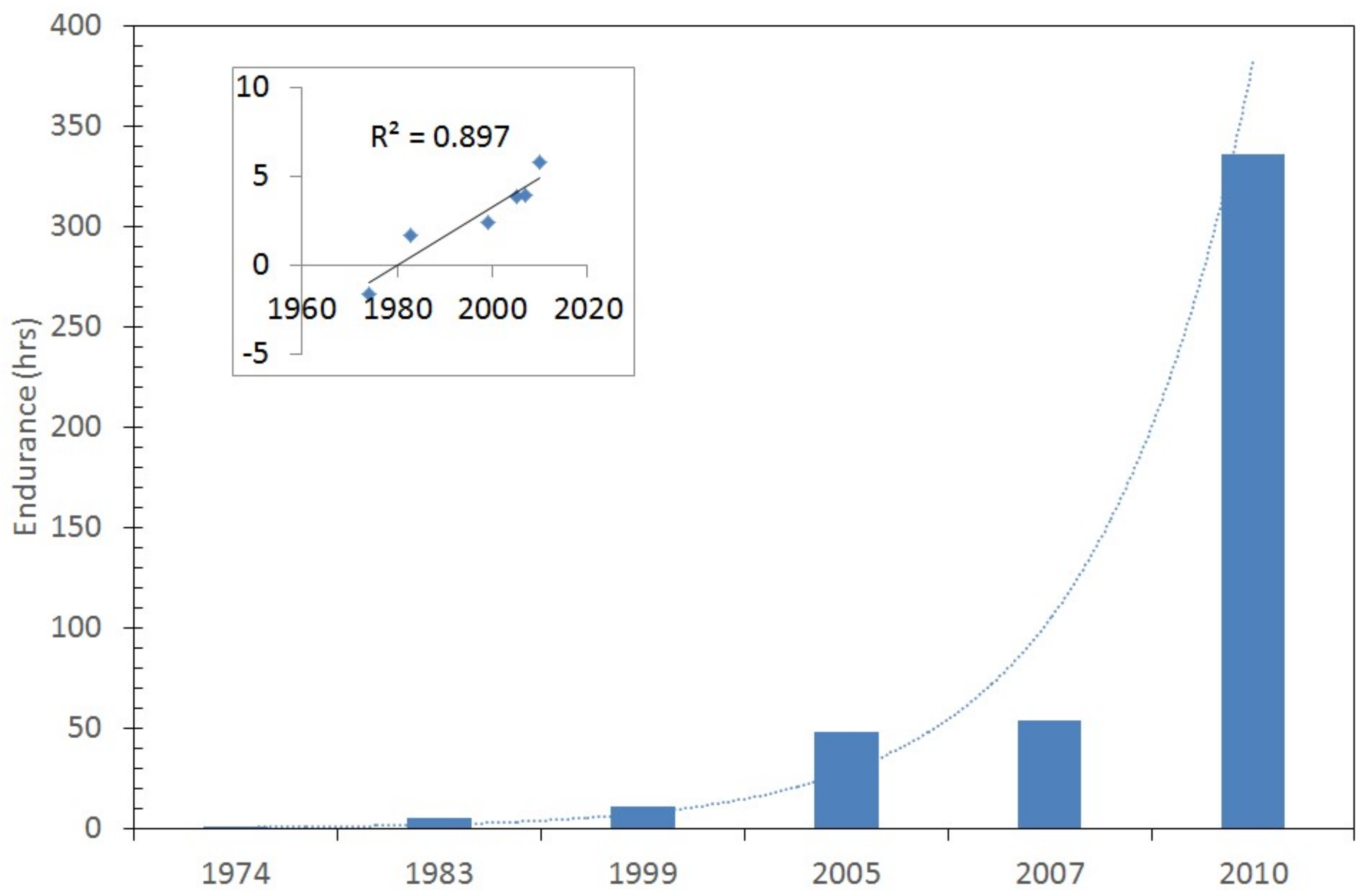
2.3. Photovoltaic-Powered
2.4. Internal Combustion Engine
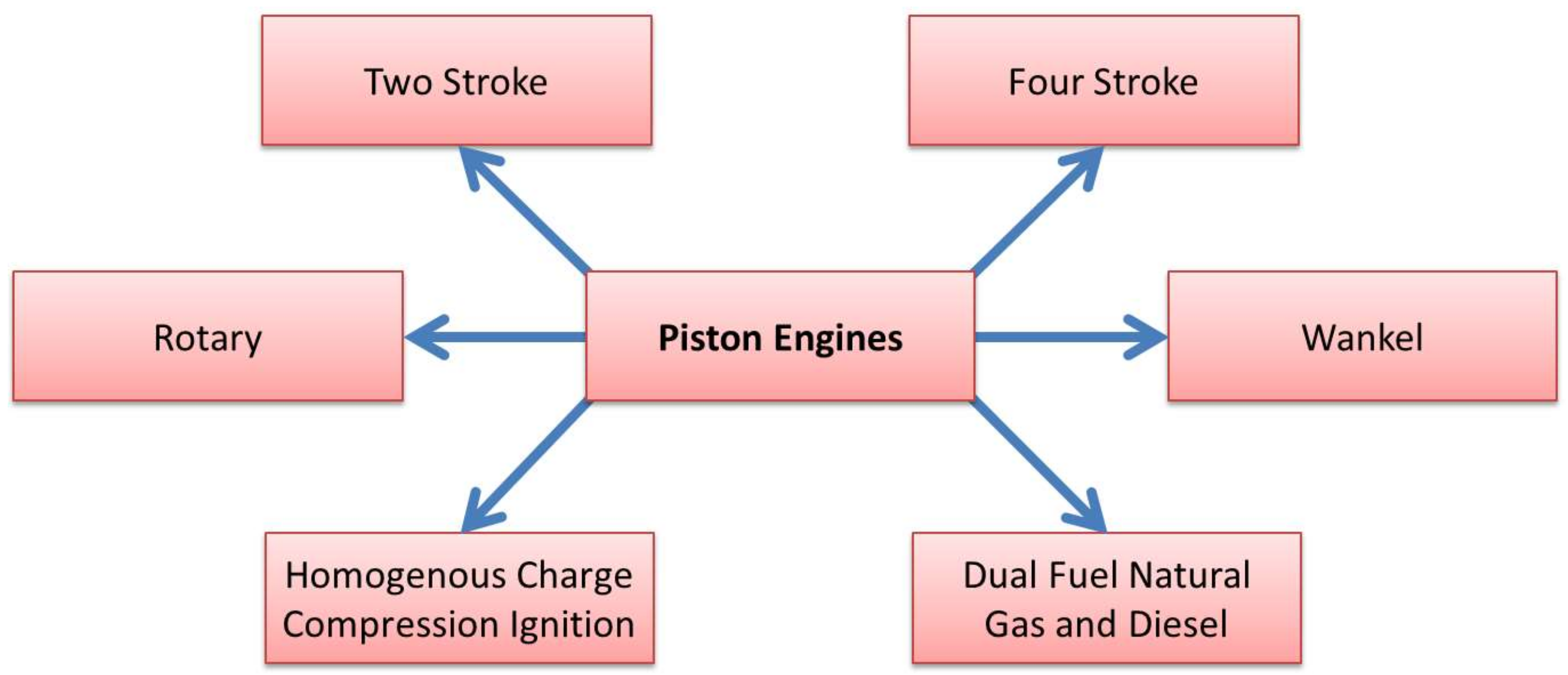
2.4.1. Piston Engine
- Two-stroke,
- Four-stoke,
- Wankel,
- Homogenous-charge ignition engine, and
- Duel fuel engine.
2.4.2. Gas Turbine Engine
- turboprop,
- turbojet,
- turbofan, and
- turboshaft.
3. Hybridization
3.1. Types of Hybrid Using Internal Combustion Engine
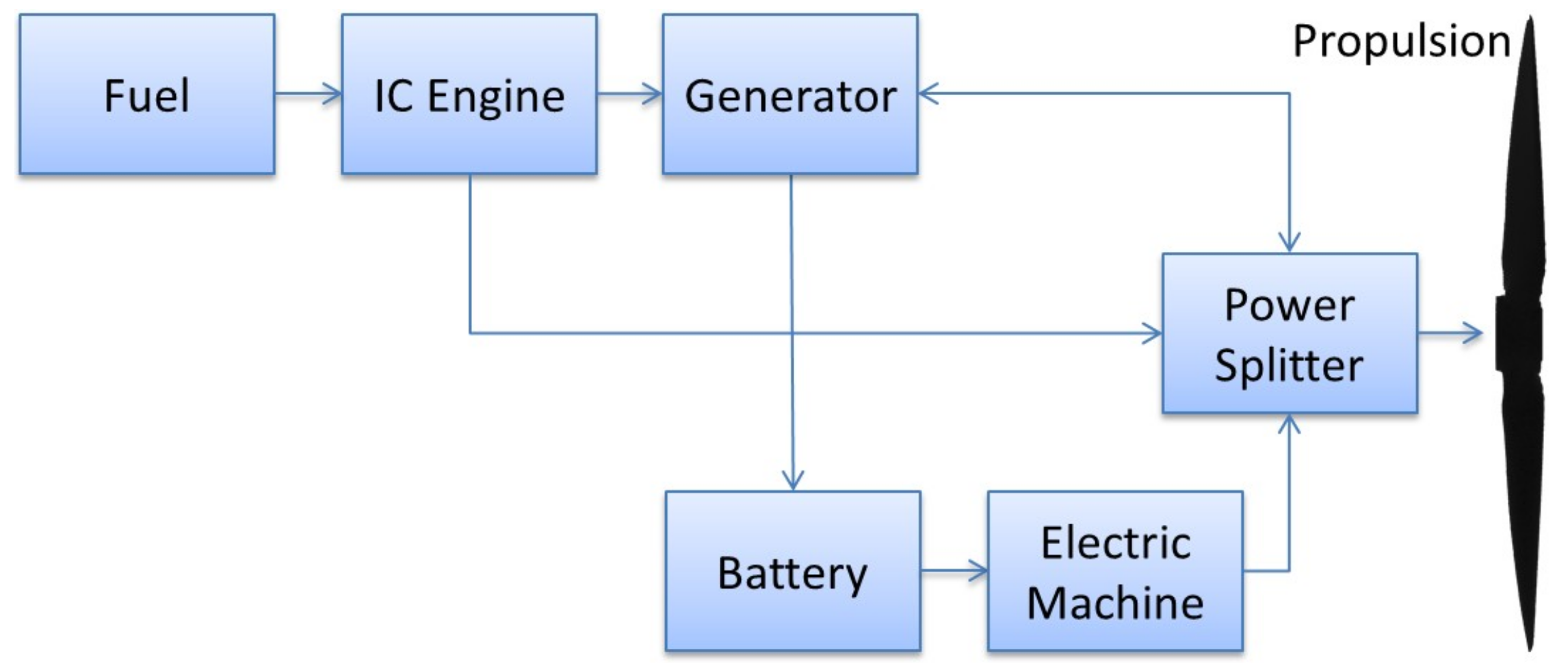
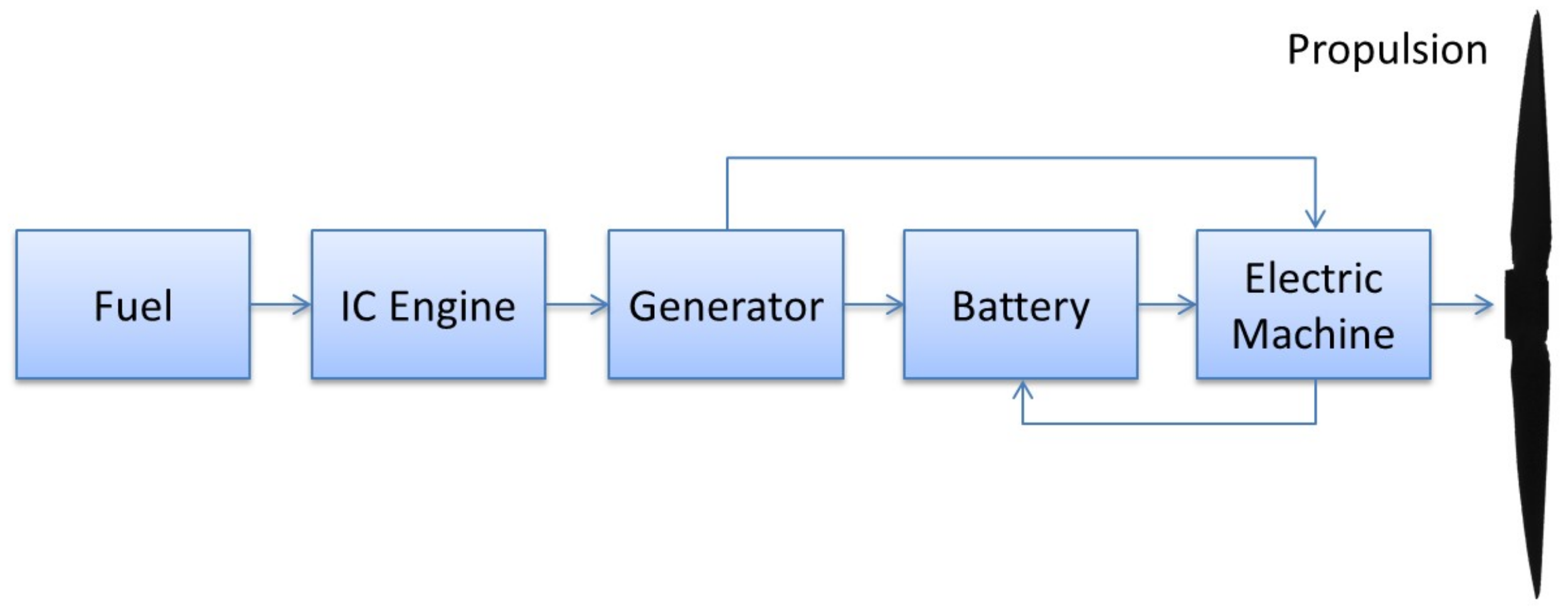
3.1.1. Series Configuration
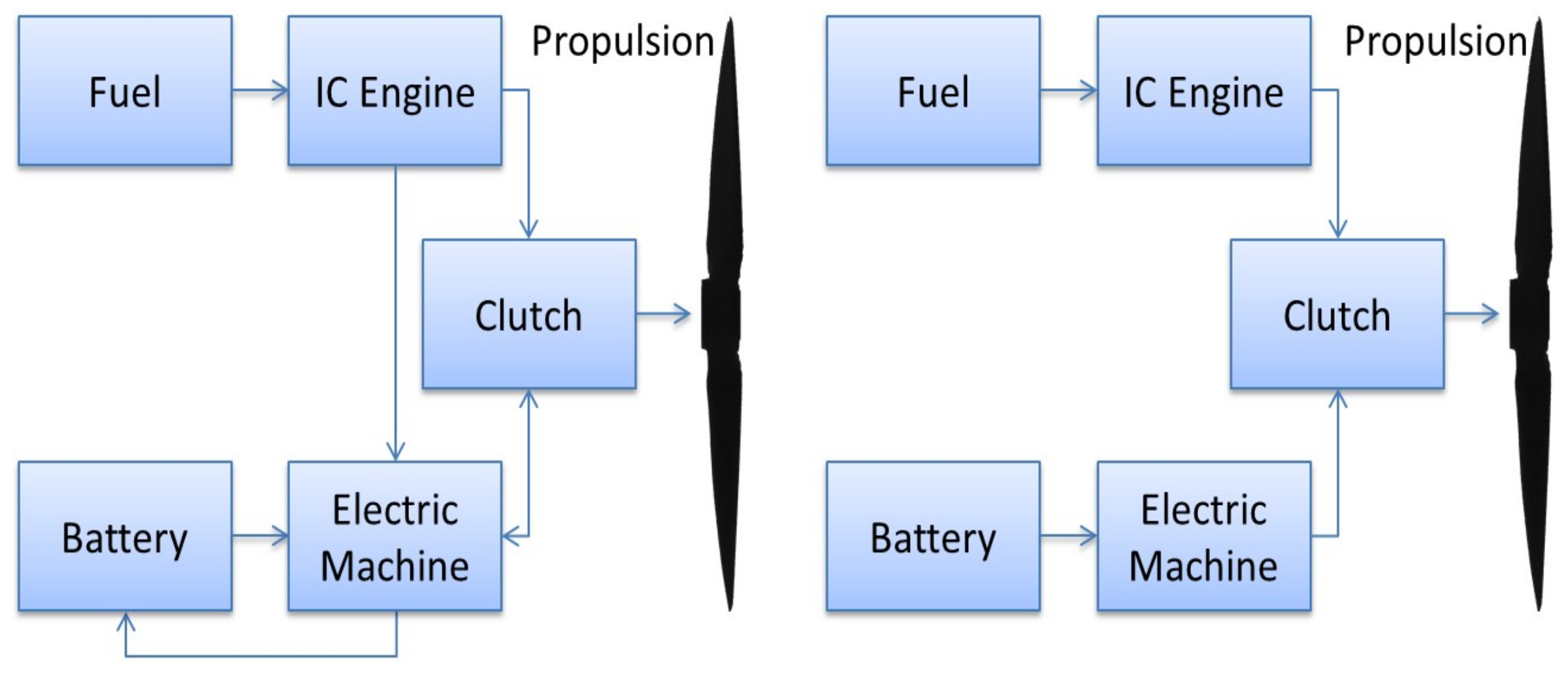
3.1.2. Parallel Configuration
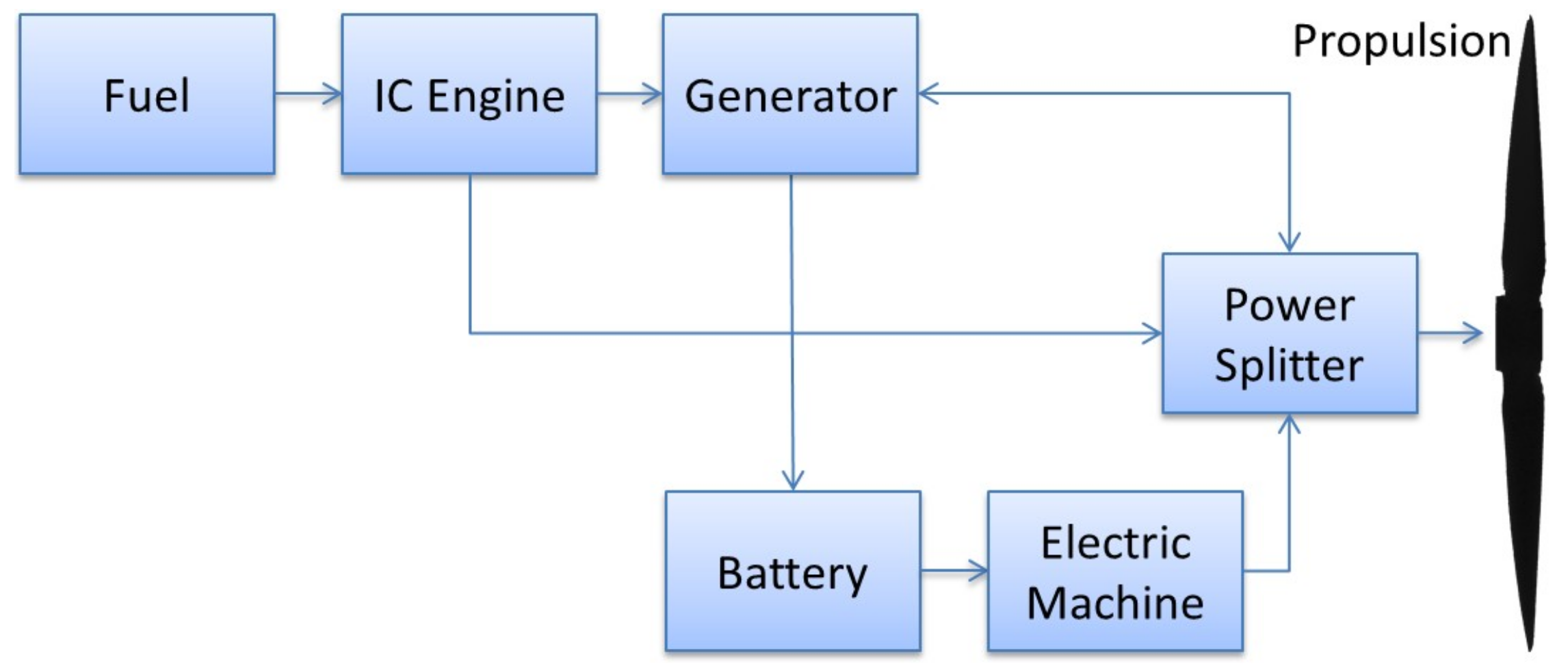
3.1.3. Series/Parallel Configuration
3.2. Fuel-Cell Hybrid
3.2.1. Fuel-Cell–Battery
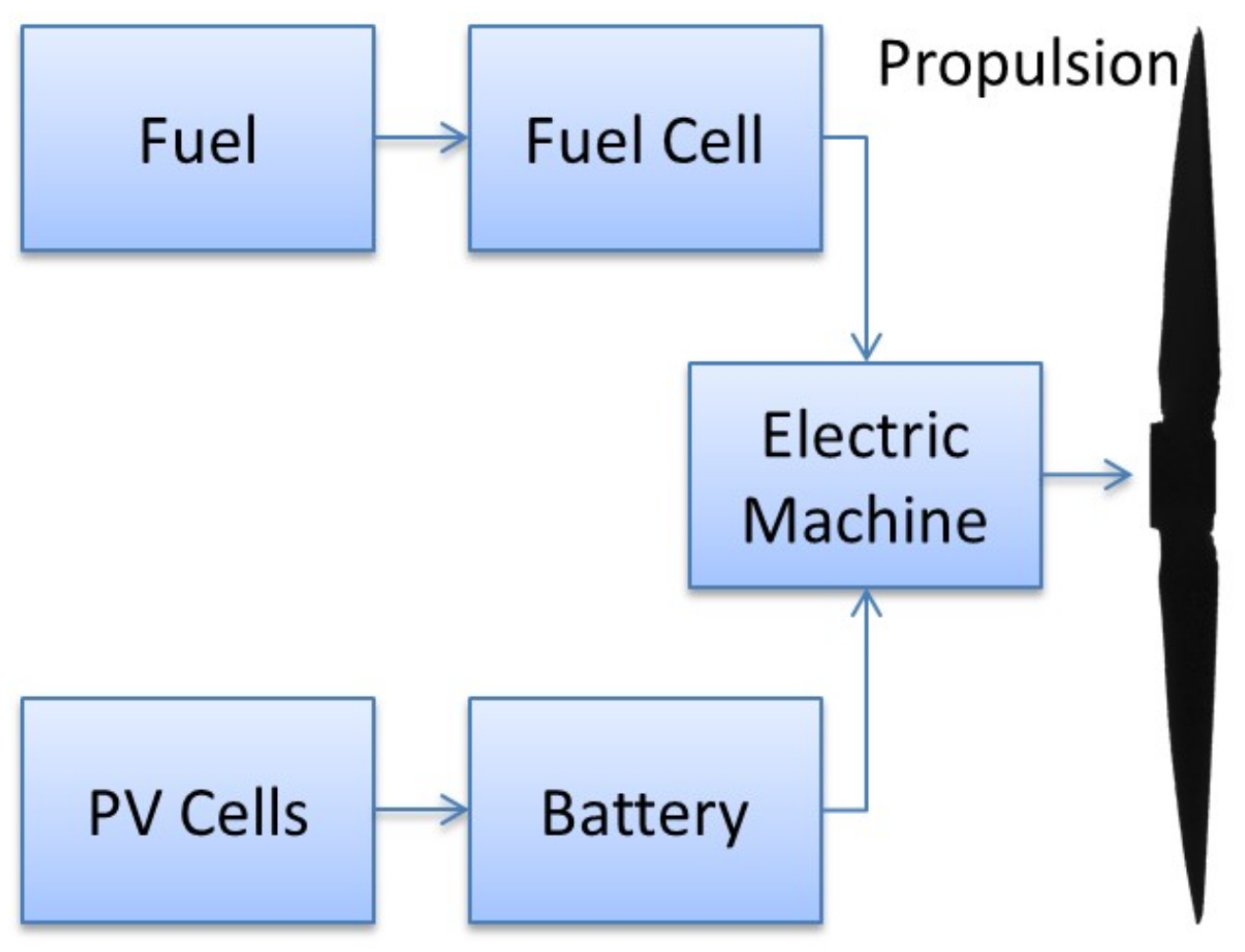
3.2.2. Fuel Cell-PV-Battery Hybrid
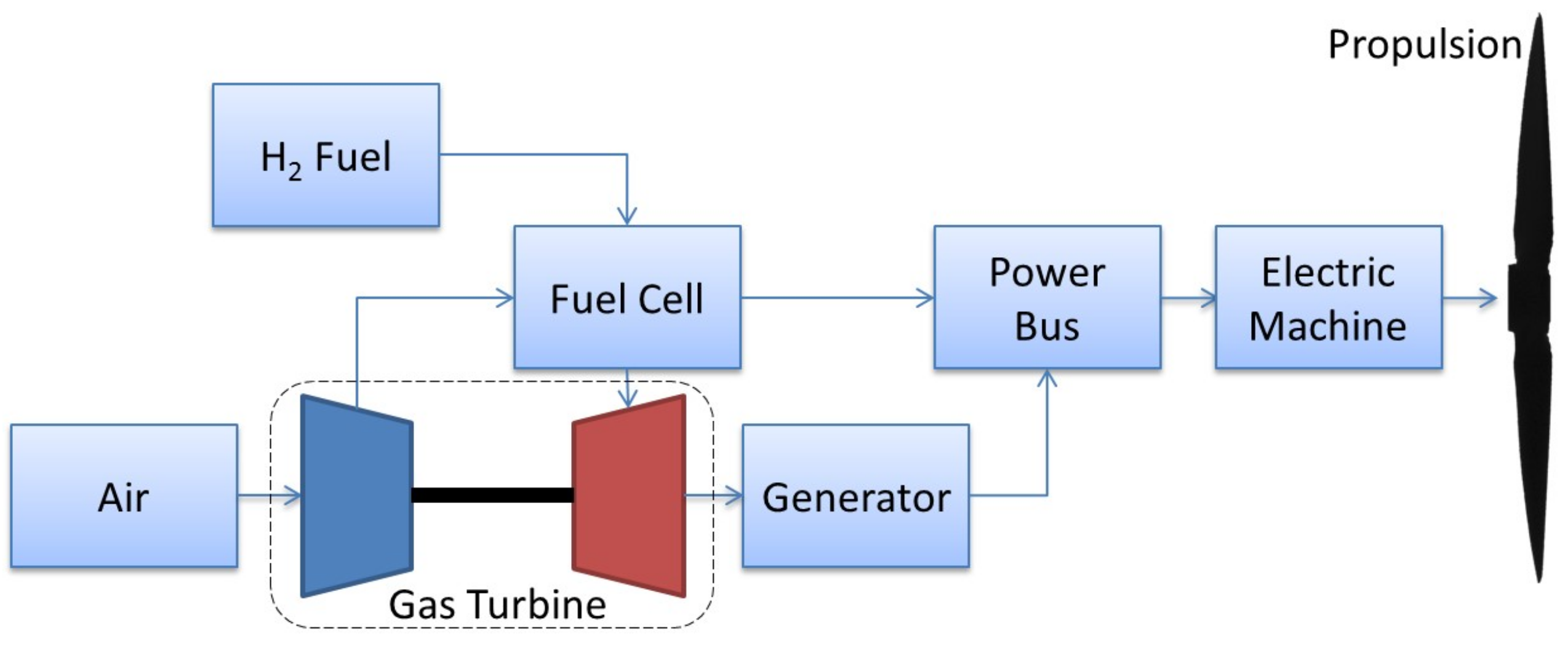
3.2.3. Fuel-Cell Gas Turbine Hybrid
3.3. ICE–PV Hybrid
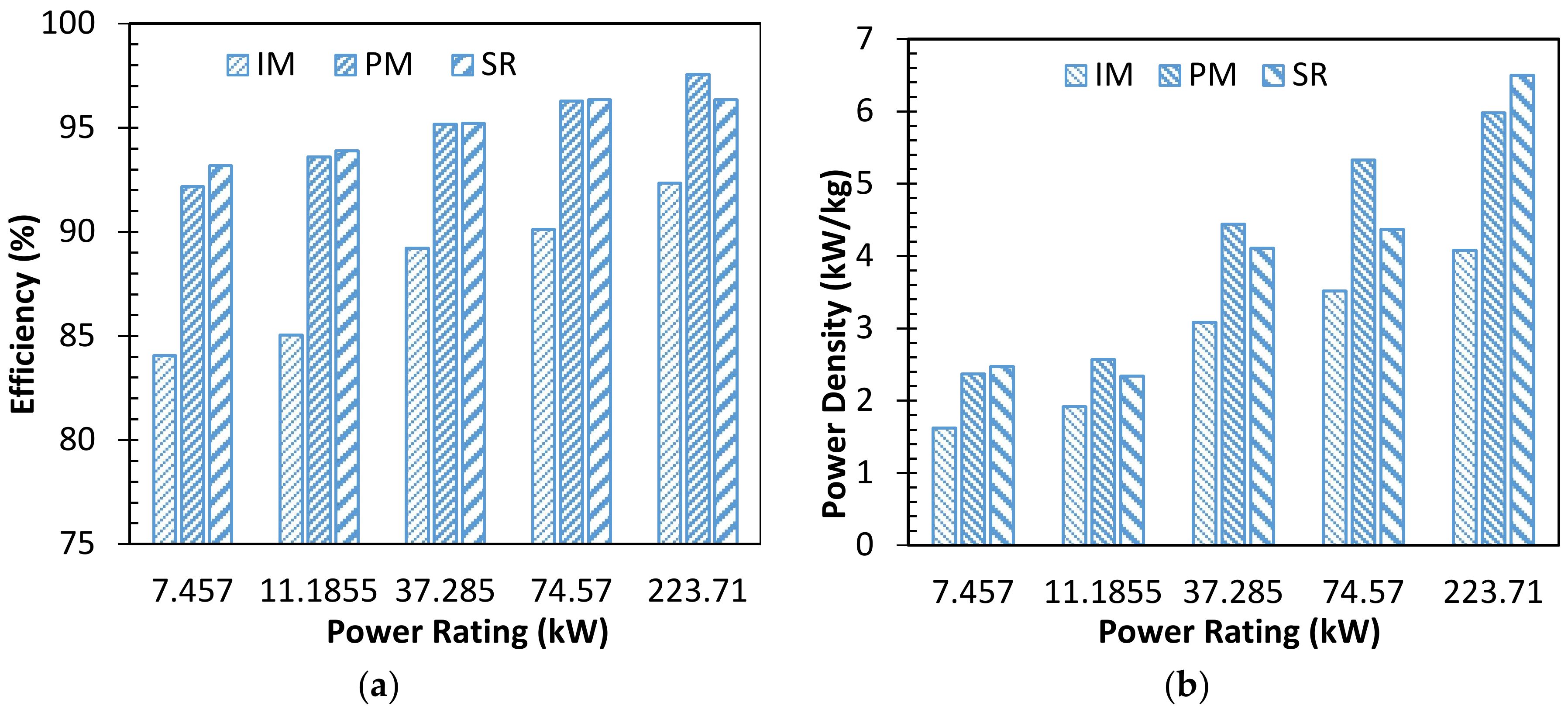
3.4. Electric Machine Technology
4. Discussion
- ICE parallel hybrid,
- ICE series hybrid,
- Fuel-cell hybrids, and
- PV hybrids.
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Vasigh, B. Introduction to Air Transport Economics: From Theory to Applications; Taylor & Francis: Milton Park, UK, 2017. [Google Scholar]
- Joshi, D. Commercial Unmanned Aerial Vehicle (UAV) Market Analysis—Industry Trends, Companies and What You Should Know. Available online: http://www.businessinsider.com/commercial-uav-market-analysis-2017-8/?r=AU&IR=T (accessed on 29 December 2017).
- Wild, G.; Murray, J.; Baxter, G. Exploring civil drone accidents and incidents to help prevent potential air disasters. Aerospace 2016, 3, 22. [Google Scholar] [CrossRef]
- Villa, T.F.; Gonzalez, F.; Miljievic, B.; Ristovski, Z.D.; Morawska, L. An overview of small unmanned aerial vehicles for air quality measurements: Present applications and future prospectives. Sensors 2016, 16, 1072. [Google Scholar] [CrossRef] [PubMed]
- Gur, O.; Rosen, A. Optimizing electric propulsion systems for unmanned aerial vehicles. J. Aircr. 2009, 46, 1340–1353. [Google Scholar] [CrossRef]
- Ott, J.; Biezad, D. Design of a tube-launched UAV. In Proceedings of the AIAA 3rd “Unmanned Unlimited” Technical Conference, Chicago, IL, USA, 20–23 September 2004. [Google Scholar]
- Davat, B.; Astier, S.; Azib, T.; Bethoux, O.; Candusso, D.; Coquery, G.; Bernardinis, A.D.; Druart, F.; Francois, B.; Arregui, M.G.; et al. Fuel cell-based hybrid systems. In Proceedings of the 8th International Symposium on Advanced Electromechanical Motion Systems & Electric Drives Joint Symposium, Lille, France, 1–3 July 2009; pp. 1–11. [Google Scholar]
- Kallo, J.; Rathke, P.; Stephan, T.; Thalau, O.; Schirmer, J.; Mayer, F. Fuel Cell Systems for Aircraft Application & Antares DLR-H2 All-Electric Flying Testbed; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2013. [Google Scholar]
- Nishizawa, A.; Kallo, J.; Garrot, O.; Weiss-Ungethüm, J. Fuel cell and li-ion battery direct hybridization system for aircraft applications. J. Power Sources 2013, 222, 294–300. [Google Scholar] [CrossRef]
- Romeo, G.; Borello, F. Design and realization of a 2-seater aircraft powered by fuel cell electric propulsion. Aeronaut. J. 2010, 114, 281–297. [Google Scholar] [CrossRef]
- Keennon, M.; Grasmeyer, J. Development of two mavs and vision of the future of mav design. In Aiaa International Air and Space Symposium and Exposition: The Next 100 Years; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2003. [Google Scholar]
- Hepperle, M. Electric Flight—Potential and Limitations. Available online: https://www.google.com.au/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&cad=rja&uact=8&ved=0ahUKEwix87Hji6fYAhUFkpQKHQCsCBoQFggnMAA&url=https%3A%2F%2Fwww.mh-aerotools.de%2Fcompany%2Fpaper_14%2FMP-AVT-209-09.pdf&usg=AOvVaw0cJrkTWiexmgm4Wvez88CD (accessed on 23 November 2017).
- Avanzini, G.; Giulietti, F. Maximum range for battery-powered aircraft. J. Aircr. 2012, 50, 304–307. [Google Scholar] [CrossRef]
- Sliwinski, J.; Gardi, A.; Marino, M.; Sabatini, R. Hybrid-electric propulsion integration in unmanned aircraft. Energy 2017, 140, 1407–1416. [Google Scholar] [CrossRef]
- Traub, L.W. Range and endurance estimates for battery-powered aircraft. J. Aircr. 2011, 48, 703–707. [Google Scholar] [CrossRef]
- Mahlia, T.M.I.; Saktisahdan, T.J.; Jannifar, A.; Hasan, M.H.; Matseelar, H.S.C. A review of available methods and development on energy storage; technology update. Renew. Sustain. Energy Rev. 2014, 33, 532–545. [Google Scholar] [CrossRef]
- García, P.; Torreglosa, J.P.; Fernández, L.M.; Jurado, F. Viability study of a fc-battery-sc tramway controlled by equivalent consumption minimization strategy. Int. J. Hydrogen Energy 2012, 37, 9368–9382. [Google Scholar] [CrossRef]
- Savoye, F.; Venet, P.; Millet, M.; Groot, J. Impact of periodic current pulses on li-ion battery performance. IEEE Trans. Ind. Electron. 2012, 59, 3481–3488. [Google Scholar] [CrossRef]
- Panasonic. Panasonic Lithium Ion NCR18650 Specifications Version 13.11 r1. Available online: http://industrial.panasonic.com/cdbs/www-data/pdf2/ACA4000/ACA4000CE240%.pdf (accessed on 27 November 2017).
- Toussaint, G.; Stevens, P.; Akrour, L.; Rouget, R.; Fourgeot, F. Development of a rechargeable zinc-air battery. ECS Trans. 2010, 28, 25–34. [Google Scholar]
- Patel, K. Lithium-sulfur battery: Chemistry, challenges, cost, and future. J. Undergrad. Res. Univ. Ill. Chic. 2016, 9, 39–42. [Google Scholar] [CrossRef]
- Kraytsberg, A.; Ein-Eli, Y. Review on li–air batteries—Opportunities, limitations and perspective. J. Power Sources 2011, 196, 886–893. [Google Scholar] [CrossRef]
- Larminie, J.; Dicks, A.; Larminie, J.; Dicks, A. Fuel cell systems analysed. In Fuel Cell Systems Explained; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2013; pp. 369–389. [Google Scholar]
- Gong, A.; Verstraete, D. Fuel cell propulsion in small fixed-wing unmanned aerial vehicles: Current status and research needs. Int. J. Hydrogen Energy 2017, 42, 21311–21333. [Google Scholar] [CrossRef]
- El-Sharkh, M.Y.; Rahman, A.; Alam, M.S.; Byrne, P.C.; Sakla, A.A.; Thomas, T. A dynamic model for a stand-alone pem fuel cell power plant for residential applications. J. Power Sources 2004, 138, 199–204. [Google Scholar] [CrossRef]
- Gadalla, M.; Zafar, S. Analysis of a hydrogen fuel cell-PV power system for small UAV. Int. J. Hydrogen Energy 2016, 41, 6422–6432. [Google Scholar] [CrossRef]
- Zakrisson, E. The Effect of Start/Stop Strategy on Pem Fuel Cell Degradation Characteristics; Chalmers University of Technology: Gothenburg, Sweden, 2011. [Google Scholar]
- Mekhilef, S.; Saidur, R.; Safari, A. Comparative study of different fuel cell technologies. Renew. Sustain. Energy Rev. 2012, 16, 981–989. [Google Scholar] [CrossRef]
- Sharaf, O.Z.; Orhan, M.F. An overview of fuel cell technology: Fundamentals and applications. Renew. Sustain. Energy Rev. 2014, 32, 810–853. [Google Scholar] [CrossRef]
- Stambouli, A.B.; Traversa, E. Solid oxide fuel cells (sofcs): A review of an environmentally clean and efficient source of energy. Renew. Sustain. Energy Rev. 2002, 6, 433–455. [Google Scholar] [CrossRef]
- Swider-Lyons, K.; Stroman, R.; Gould, B.D.; Rodgers, J.A.; Mackrell, J.; Schuette, M.; Page, G. Hydrogen fuel cells for small unmanned air vehicles. ECS Trans. 2014, 64, 963–972. [Google Scholar] [CrossRef]
- Kabir, E.; Kumar, P.; Kumar, S.; Adelodun, A.A.; Kim, K.-H. Solar energy: Potential and future prospects. Renew. Sustain. Energy Rev. 2018, 82, 894–900. [Google Scholar] [CrossRef]
- Partain, L.D. Solar Cells and Their Applications, 1st ed.; John Wiley & Sons, Inc.: Edison, NJ, USA, 1995; p. 349. [Google Scholar]
- Harmats, M.; Weihs, D. Hybrid-propulsion high-altitude long-endurance remotely piloted vehicle. J. Aircr. 1999, 36, 321–331. [Google Scholar] [CrossRef]
- Delmas, M.A.; Kahn, M.E.; Locke, S.L. The private and social consequences of purchasing an electric vehicle and solar panels: Evidence from california. Res. Econ. 2017, 71, 225–235. [Google Scholar] [CrossRef]
- Kaltenbrunner, M.; White, M.S.; Głowacki, E.D.; Sekitani, T.; Someya, T.; Sariciftci, N.S.; Bauer, S. Ultrathin and lightweight organic solar cells with high flexibility. Nat. Commun. 2012, 3, 770. [Google Scholar] [CrossRef] [PubMed]
- Green, M.A. Third Generation Photovoltaics Advanced Solar Energy Conversion; Springer: Berlin, Germany; New York, NY, USA, 2003. [Google Scholar]
- Habas, S.E.; Platt, H.A.S.; van Hest, M.F.A.M.; Ginley, D.S. Low-cost inorganic solar cells: From ink to printed device. Chem. Rev. 2010, 110, 6571–6594. [Google Scholar] [CrossRef] [PubMed]
- Jørgensen, M.; Norrman, K.; Gevorgyan, S.A.; Tromholt, T.; Andreasen, B.; Krebs, F.C. Stability of polymer solar cells. Adv. Mater. 2012, 24, 580–612. [Google Scholar] [CrossRef] [PubMed]
- Bloch, W.M.; Champness, N.R.; Doonan, C.J. X-ray crystallography in open-framework materials. Angew. Chem. Int. Ed. 2015, 54, 12860–12867. [Google Scholar] [CrossRef] [PubMed]
- Gao, P.; Gratzel, M.; Nazeeruddin, M.K. Organohalide lead perovskites for photovoltaic applications. Energy Environ. Sci. 2014, 7, 2448–2463. [Google Scholar] [CrossRef]
- Yang, W.S.; Noh, J.H.; Jeon, N.J.; Kim, Y.C.; Ryu, S.; Seo, J.; Seok, S.I. High-performance photovoltaic perovskite layers fabricated through intramolecular exchange. Science 2015, 348, 1234–1237. [Google Scholar] [CrossRef] [PubMed]
- Amos, J. Zephyr Solar Plane Set for Record Endurance Flight; BBC News: London, UK, 2010. [Google Scholar]
- Noth, A. History of Solar Flight. Available online: www.sky-sailor.ethz.ch/docs/History_of_Solar_Flight_v1.2-A.Noth_2006.pdf (accessed on 23 December 2017).
- Boucher, R.J. Sunrise, the world’s first solar-powered airplane. J. Aircr. 1985, 22, 840–846. [Google Scholar] [CrossRef]
- Adamski, M. Analysis of propulsion systems of unmanned aerial vehicles. J. Mar. Eng. Technol. 2017, 16, 1–7. [Google Scholar] [CrossRef]
- Zhou, L.; Liu, X.; Gao, Z. Internal Combustion Engine; China Machine Press: Beijing, China, 2004. [Google Scholar]
- Petrakopoulou, F.; Sánchez-Delgado, S.; Marugán-Cruz, C.; Santana, D. Improving the efficiency of gas turbine systems with volumetric solar receivers. Energy Convers. Manag. 2017, 149, 579–592. [Google Scholar] [CrossRef]
- Thounthong, P.; Rael, S. The benefits of hybridization. IEEE Ind. Electron. Mag. 2009, 3, 25–37. [Google Scholar] [CrossRef]
- Williamson, S.; Lukic, M.; Emadi, A. Comprehensive drive train efficiency analysis of hybrid electric and fuel cell vehicles based on motor-controller efficiency modeling. IEEE Trans. Power Electron. 2006, 21, 730–740. [Google Scholar] [CrossRef]
- Emadi, A.; Williamson, S.S.; Khaligh, A. Power electronics intensive solutions for advanced electric, hybrid electric, and fuel cell vehicular power systems. IEEE Trans. Power Electron. 2006, 21, 567–577. [Google Scholar] [CrossRef]
- Bataller-Planes, E.; Lapena-Rey, N.; Mosquera, J.; Orti, F.; Oliver, J.A.; Garcia, O.; Moreno, F.; Portilla, J.; Torroja, Y.; Vasic, M.; et al. Power balance of a hybrid power source in a power plant for a small propulsion aircraft. In Proceedings of the 2008 IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 295–301. [Google Scholar]
- Jalil, N.; Kheir, N.A.; Salman, M. A rule-based energy management strategy for a series hybrid vehicle. In Proceedings of the 1997 American Control Conference (Cat. No.97CH36041), Las Cruces, NM, USA, 4–6 June 1997; Volume 681, pp. 689–693. [Google Scholar]
- Wang, H.; Huang, Y.; He, H.; Lv, C.; Liu, W.; Khajepour, A. Chapter 5—Energy management of hybrid electric vehicles a2—Zhang, Hui. In Modeling, Dynamics and Control of Electrified Vehicles; Cao, D., Du, H., Eds.; Woodhead Publishing: Sawston, UK, 2018; pp. 159–206. [Google Scholar]
- Harmon, F.G. Neural Network Control of a Parallel Hybrid-Electric Propulsion System for a Small Unmanned Aerial Vehicle. Ph.D. Thesis, University of California, Davis, CA, USA, 2005. [Google Scholar]
- Galvagno, E.; Morina, D.; Sorniotti, A.; Velardocchia, M. Drivability analysis of through-the-road-parallel hybrid vehicles. Meccanica 2013, 48, 351–366. [Google Scholar] [CrossRef] [Green Version]
- Minh, V.T.; Rashid, A.A. Automatic control of clutches and simulations for parallel hybrid vehicles. Int. J. Autom. Technol. 2012, 13, 645–651. [Google Scholar] [CrossRef]
- Pennestrì, E.; Mariti, L.; Valentini, P.P.; Mucino, V.H. Efficiency evaluation of gearboxes for parallel hybrid vehicles: Theory and applications. Mech. Mach. Theory 2012, 49, 157–176. [Google Scholar] [CrossRef]
- Hung, J.Y.; Gonzalez, L.F. On parallel hybrid-electric propulsion system for unmanned aerial vehicles. Prog. Aerosp. Sci. 2012, 51, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Wall, T.J.; Meyer, R. A survey of hybrid electric propulsion for aircraft. In Proceedings of the 53rd AIAA/SAE/ASEE Joint Propulsion Conference, Atlanta, GA, USA, 10–12 July 2017. [Google Scholar]
- Chau, K.T.; Wong, Y.S. Overview of power management in hybrid electric vehicles. Energy Convers. Manag. 2002, 43, 1953–1968. [Google Scholar] [CrossRef]
- Jossen, A.; Garche, J.; Doering, H.; Goetz, M.; Knaupp, W.; Joerissen, L. Hybrid systems with lead–acid battery and proton-exchange membrane fuel cell. J. Power Sources 2005, 144, 395–401. [Google Scholar] [CrossRef]
- Kim, T.; Kwon, S. Design and development of a fuel cell-powered small unmanned aircraft. Int. J. Hydrogen Energy 2012, 37, 615–622. [Google Scholar] [CrossRef]
- Verstraete, D.; Cazzato, L.; Romeo, G. Preliminary design of a fuel-cell-based hybrid-electrical UAV. In Proceedings of the 28th Congress of the International Council of the Aeronautical Sciences, Brisbane, Australia, 23–28 September 2012; Volume 1, pp. 422–431. [Google Scholar]
- Fathabadi, H. High thermal performance lithium-ion battery pack including hybrid active–passive thermal management system for using in hybrid/electric vehicles. Energy 2014, 70, 529–538. [Google Scholar] [CrossRef]
- Motapon, S.N.; Dessaint, L.A.; Al-Haddad, K. A comparative study of energy management schemes for a fuel-cell hybrid emergency power system of more-electric aircraft. IEEE Trans. Ind. Electron. 2014, 61, 1320–1334. [Google Scholar] [CrossRef]
- Renau, J.; Sánchez, F.; Lozano, A.; Barroso, J.; Barreras, F. Analysis of the performance of a passive hybrid powerplant to power a lightweight unmanned aerial vehicle for a high altitude mission. J. Power Sources 2017, 356, 124–132. [Google Scholar] [CrossRef]
- Kim, K.; Kim, T.; Lee, K.; Kwon, S. Fuel cell system with sodium borohydride as hydrogen source for unmanned aerial vehicles. J. Power Sources 2011, 196, 9069–9075. [Google Scholar] [CrossRef]
- Verstraete, D.; Lehmkuehler, K.; Gong, A.; Harvey, J.R.; Brian, G.; Palmer, J.L. Characterisation of a hybrid, fuel-cell-based propulsion system for small unmanned aircraft. J. Power Sources 2014, 250, 204–211. [Google Scholar] [CrossRef]
- Zafar, S.; Gadalla, M. Evaluation of an integrated fuel cell-PV panel system as a hybrid UAV powerplant. In Proceedings of the ASME 2012 International Mechanical Engineering Congress and Exposition, Houston, TX, USA, 9–15 November 2012; pp. 1387–1392. [Google Scholar]
- Aguiar, P.; Brett, D.J.L.; Brandon, N.P. Solid oxide fuel cell/gas turbine hybrid system analysis for high-altitude long-endurance unmanned aerial vehicles. Int. J. Hydrogen Energy 2008, 33, 7214–7223. [Google Scholar] [CrossRef]
- Tornabene, R.T.; Freeh, J.E.; Steffen, C.J., Jr.; Wang, X.-Y.J.; Himansu, A. Hybrid Solid Oxide fuel Cell/Gas Turbine System Design for High Altitude Long Endurance Aerospace Missions—NASA/TM-2006-214328; NASA Glenn Research Center: Cleveland, OH, USA, 2006. [Google Scholar]
- Briggs, S.J.; Bartos, M.J.; Arno, R.G. Reliability and availability assessment of electrical and mechanical systems. IEEE Trans. Ind. Appl. 1998, 34, 1387–1396. [Google Scholar] [CrossRef]
- Kiel, E. Drive Solutions Mechatronics for Production and Logistics; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Raimondi, G.M.; Sawata, T.; Holme, M.; Barton, A.; White, G.; Coles, J.; Mellor, P.H.; Sidell, N. Aircraft embedded generation systems. In Proceedings of the 2002 International Conference on Power Electronics, Machines and Drives (Conf. Publ. No. 487), Bath, UK, 4–7 June 2002; pp. 217–222. [Google Scholar]
- Fernando, W.U.N.; Barnes, M.; Marjanovic, O. Direct drive permanent magnet generator fed AC-DC active rectification and control for more-electric aircraft engines. IET Electr. Power Appl. 2011, 5, 14–27. [Google Scholar] [CrossRef]
- Fernando, N.; Vakil, G.; Arumugam, P.; Amankwah, E.; Gerada, C.; Bozhko, S. Impact of Soft Magnetic Material on Design of High-Speed Permanent-Magnet Machines. IEEE Trans. Ind. Electron. 2017, 64, 2415–2423. [Google Scholar] [CrossRef]
- Fernando, W.U.N.; Arumugam, P.; Gerada, C. Design of a Stator for a High-Speed Turbo-generator with Fixed Permanent Magnet Rotor Radius and Volt-Ampere Constraints. IEEE Trans. Energy Convers. 2018. [Google Scholar] [CrossRef]
- Krishnan, R.; Bharadwaj, A.S. A comparative study of various motor drive systems for aircraft applications. In Proceedings of the 1991 IEEE Industry Applications Society Annual Meeting, Dearborn, MI, USA, 28 September–4 October 1991; Volume 1, pp. 252–258. [Google Scholar]
- Van der Geest, M.; Polinder, H.; Ferreira, J.A.; Christmann, M. Power Density Limits and Design Trends of High-Speed Permanent Magnet Synchronous Machines. IEEE Trans. Transp. Electrif. 2015, 1, 266–276. [Google Scholar] [CrossRef]
- Gerada, D.; Mebarki, A.; Brown, N.L.; Gerada, C.; Cavagnino, A.; Boglietti, A. High-Speed Electrical Machines: Technologies, Trends, and Developments. IEEE Trans. Ind. Electron. 2014, 61, 2946–2959. [Google Scholar] [CrossRef]
- Malkamäki, M.; Jaatinen-Värri, A.; Honkatukia, A.; Backman, J.; Larjola, J. A high efficiency microturbine concept. In Proceedings of the 11th European Conference on Turbomachinery Fluid Dynamics and Thermodynamics, Madrid, Spain, 23–25 March 2015. [Google Scholar]
- Hiserote, R.; Harmon, F. Analysis of hybrid-electric propulsion system designs for small unmanned aircraft systems. In Proceedings of the 8th Annual International Energy Conversion Engineering Conference, Nashville, TN, USA, 25–28 July 2010. [Google Scholar]
- Harmon, F.G.; Frank, A.A.; Chattot, J.-J. Conceptual design and simulation of a small hybrid-electric unmanned aerial vehicle. J. Aircr. 2006, 43, 1490–1498. [Google Scholar] [CrossRef]
- Glassock, R.; Hung, J.Y.; Gonzalez, L.F.; Walker, R.A. Design, modelling and measurement of a hybrid powerplant for unmanned aerial systems. Aust. J. Mech. Eng. 2008, 6, 69–78. [Google Scholar] [CrossRef]
- Donateo, T.; Spedicato, L. Fuel economy of hybrid electric flight. Appl. Energy 2017, 206, 723–738. [Google Scholar] [CrossRef]
- Merical, K.; Beechner, T.; Yelvington, P. Hybrid-electric, heavy-fuel propulsion system for small unmanned aircraft. SAE Int. J. Aerosp. 2014, 7, 126–134. [Google Scholar] [CrossRef]
- Gao, X.-Z.; Hou, Z.-X.; Guo, Z.; Chen, X.-Q. Reviews of methods to extract and store energy for solar-powered aircraft. Renew. Sustain. Energy Rev. 2015, 44, 96–108. [Google Scholar] [CrossRef]
- Gong, A.; Palmer, J.L.; Brian, G.; Harvey, J.R.; Verstraete, D. Performance of a hybrid, fuel-cell-based power system during simulated small unmanned aircraft missions. Int. J. Hydrogen Energy 2016, 41, 11418–11426. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Specific Eenergy (Wh/kg) | ||
|---|---|---|---|
| Theoretical 1 | Current | Expected in 2025 1 | |
| Li-Ion | 390 | 240 2 | 250 |
| Zn-air | 1090 | 442 3 | 500 |
| Li-S | 2570 | 375 4 | 1250 |
| Li-O2 | 3500 | 362 5 | 1750 |
| Model | Percentage of Improvement |
|---|---|
| Parallel Hybrid |
|
| Series Hybrid | |
| Fuel cell Hybrid | |
| PV hybrid |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdul Sathar Eqbal, M.; Fernando, N.; Marino, M.; Wild, G. Hybrid Propulsion Systems for Remotely Piloted Aircraft Systems. Aerospace 2018, 5, 34. https://doi.org/10.3390/aerospace5020034
Abdul Sathar Eqbal M, Fernando N, Marino M, Wild G. Hybrid Propulsion Systems for Remotely Piloted Aircraft Systems. Aerospace. 2018; 5(2):34. https://doi.org/10.3390/aerospace5020034
Chicago/Turabian StyleAbdul Sathar Eqbal, Mithun, Nuwantha Fernando, Matthew Marino, and Graham Wild. 2018. "Hybrid Propulsion Systems for Remotely Piloted Aircraft Systems" Aerospace 5, no. 2: 34. https://doi.org/10.3390/aerospace5020034
APA StyleAbdul Sathar Eqbal, M., Fernando, N., Marino, M., & Wild, G. (2018). Hybrid Propulsion Systems for Remotely Piloted Aircraft Systems. Aerospace, 5(2), 34. https://doi.org/10.3390/aerospace5020034