AEROM: NASA’s Unsteady Aerodynamic and Aeroelastic Reduced-Order Modeling Software

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Computational Methods
2.1. FUN3D Code
2.2. System Identification Method
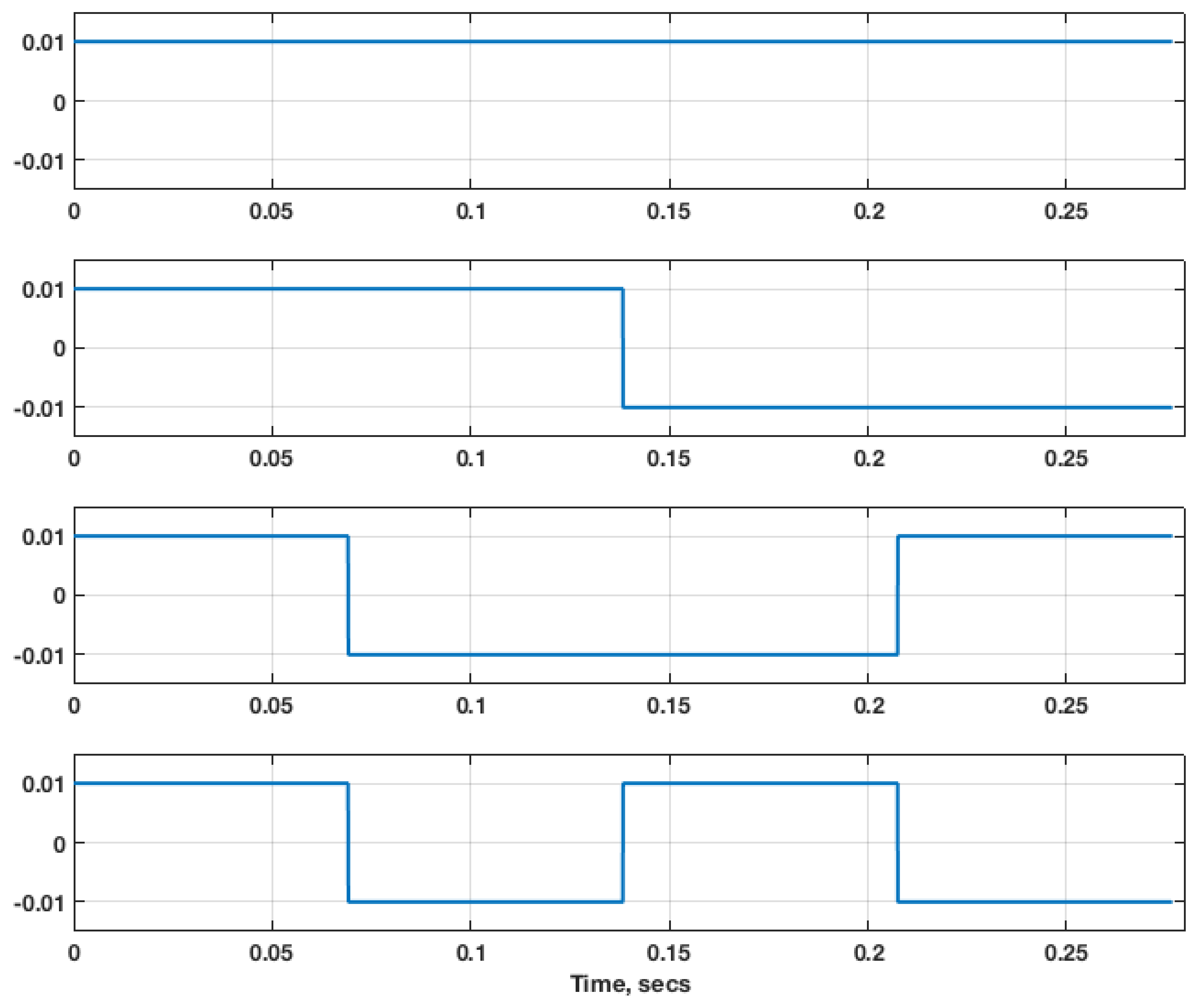
2.3. Simultaneous Excitation Input Functions
3. ROM Development Processes
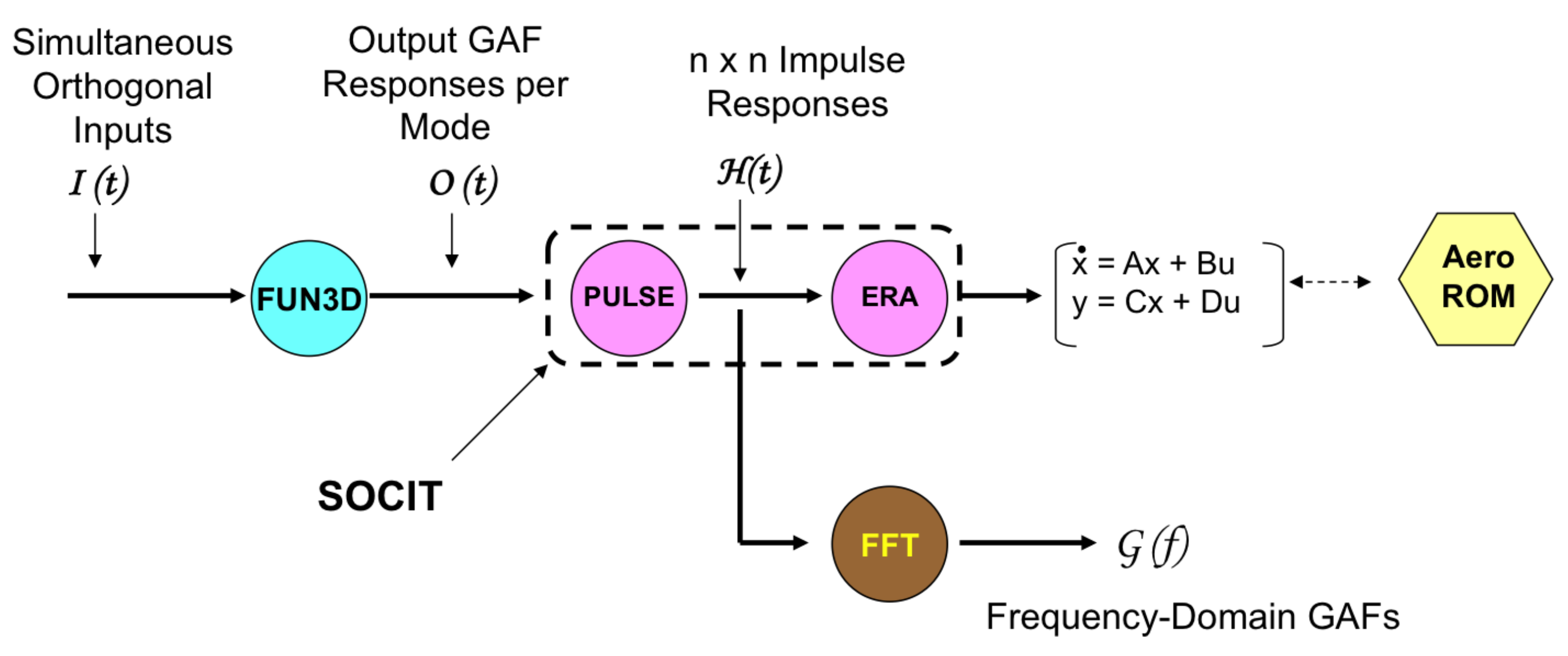
3.1. Improved ROM Development Process
- Create as many orthogonal functions as the number of structural modes of interest;
- Starting from the restart of a steady rigid CFD solution, execute a single CFD solution using the orthogonal excitation inputs simultaneously, resulting in GAF responses due to these inputs;
- Identify the individual impulse responses from the responses computed in Step 2 using the PULSE algorithm;
- Using the ERA, convert the impulse responses from Step 3 into an unsteady aerodynamic state-space model;
- Using full-solution CFD results, compare with solutions generated using the model generated in Step 4;
3.2. Error Minimization
4. Sample Results
4.1. Low-Boom N+2 Configuration
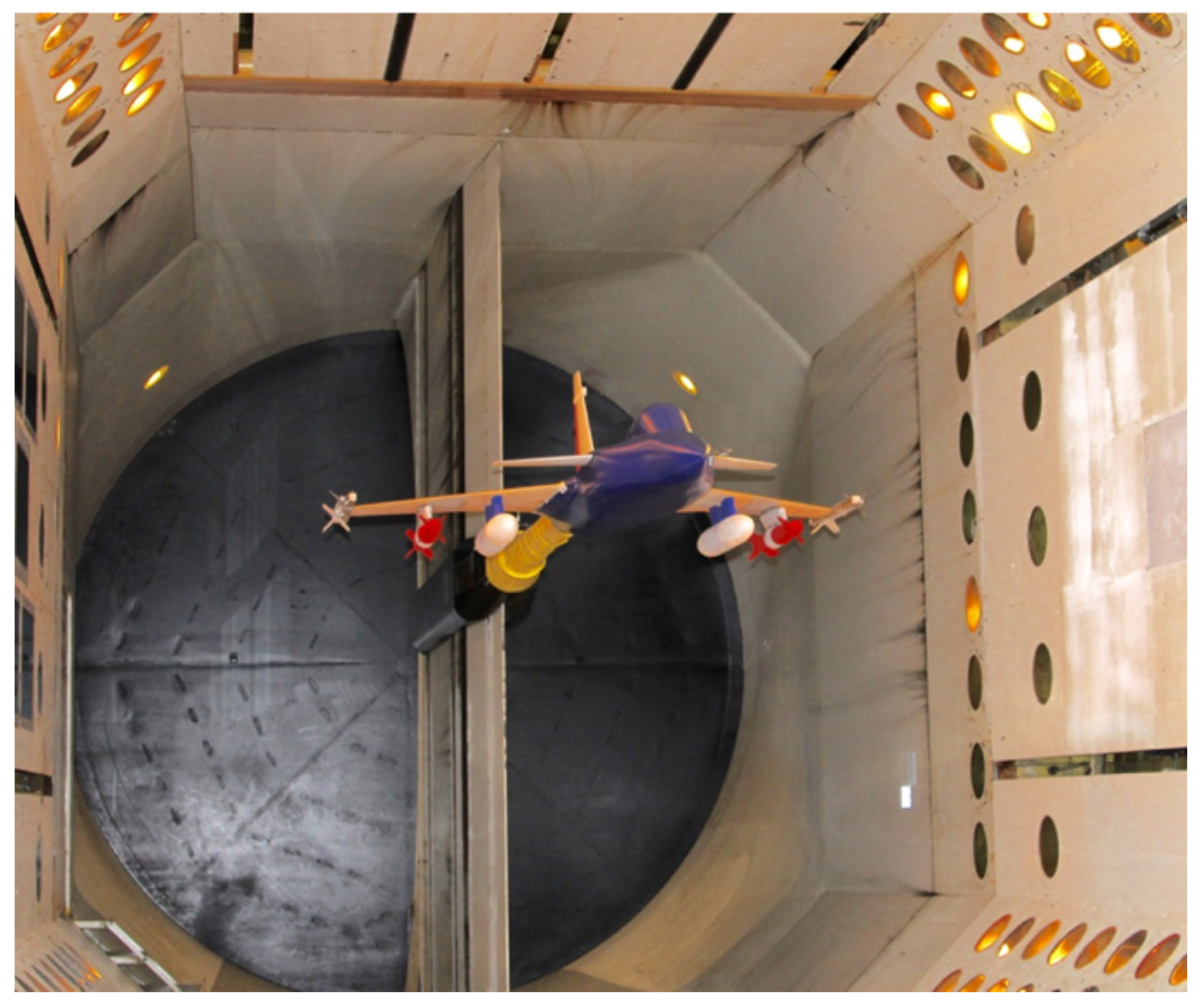
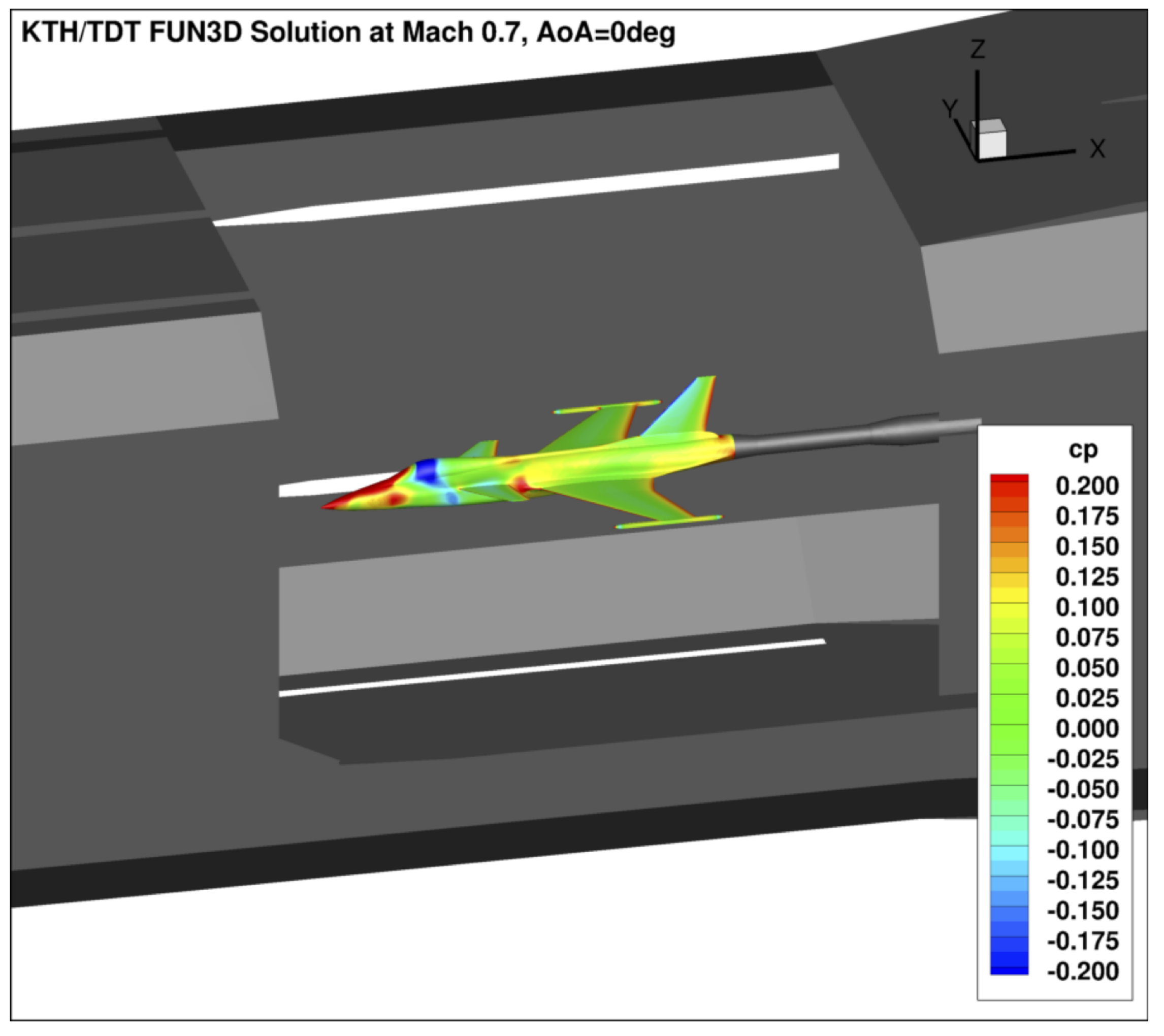
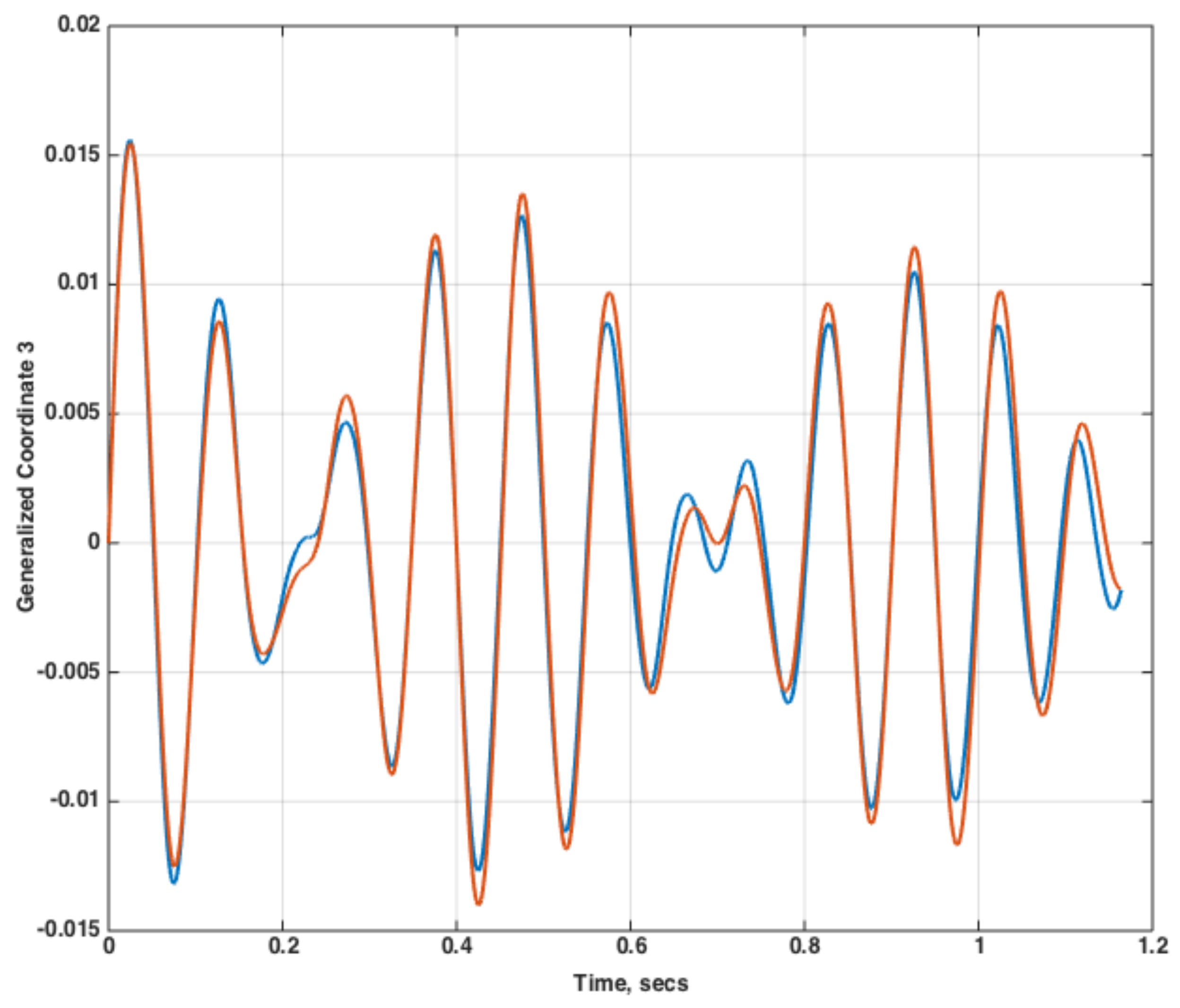
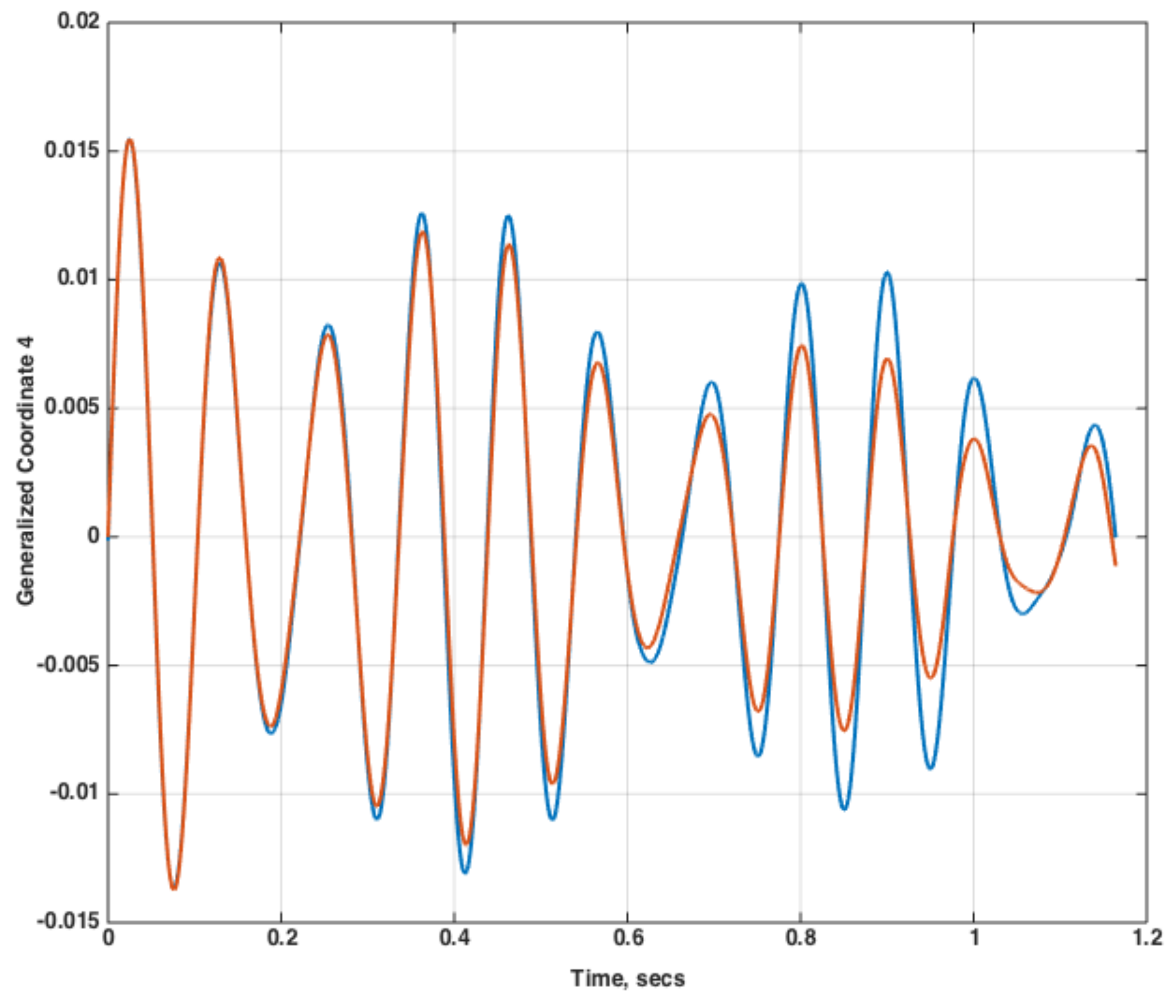
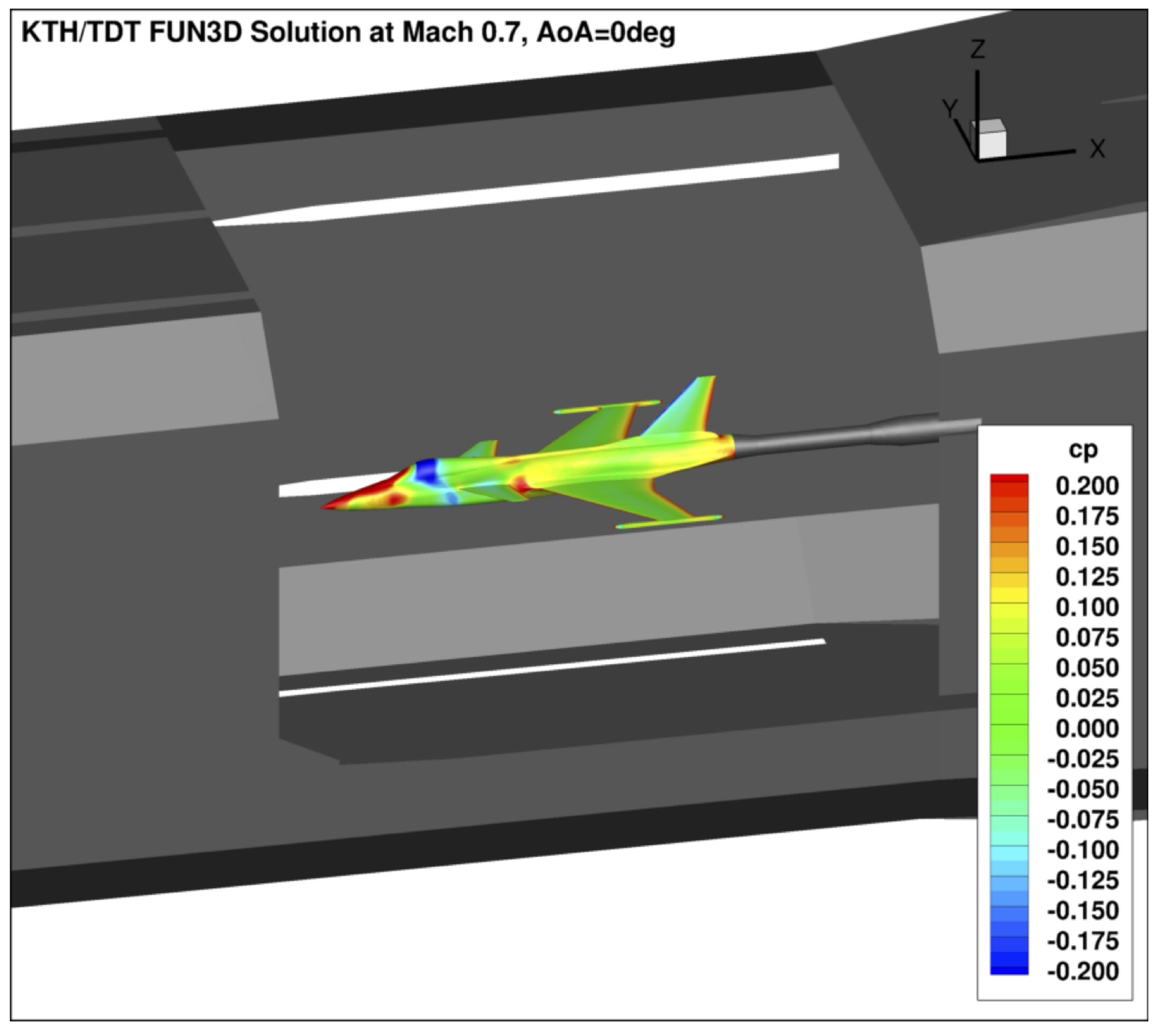
4.2. KTH Generic Fighter
4.3. AGARD 445.6 Wing
4.3.1. Inviscid Results
4.3.2. Viscous Results
5. Conclusions
Conflicts of Interest
References
- Adams, W.M.; Hoadley, S.T. ISAC: A Tool for Aeroservoelastic Modeling and Analysis. In Proceedings of the 34th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, La Jolla, CA, USA, 19–22 April 1993. AIAA-1993-1421. [Google Scholar]
- Silva, W.A. Simultaneous Excitation of Multiple-Input/Multiple-Output CFD-Based Unsteady Aerodynamic Systems. J. Aircr. 2008, 45, 1267–1274. [Google Scholar] [CrossRef]
- Silva, W.A.; Vatsa, V.N.; Biedron, R.T. Development of Unsteady Aerodynamic and Aeroelastic Reduced-Order Models Using the FUN3D Code. Presented at the International Forum on Aeroelasticity and Structural Dynamics, Seattle, WA, USA, 21–25 June 2009. IFASD Paper No. 2009-30. [Google Scholar]
- Silva, W.A.; Vatsa, V.N.; Biedron, R.T. Reduced-Order Models for the Aeroelastic Analyses of the Ares Vehicles. Presented at the 28th AIAA Applied Aerodynamics Conference, Chicago, IL, USA, 28 June–1 July 2010. AIAA Paper No. 2010-4375. [Google Scholar]
- Silva, W.A. Discrete-Time Linear and Nonlinear Aerodynamic Impulse Responses for Efficient CFD Analyses. Ph.D. Thesis, College of William & Mary, Williamsburg, VA, USA, December 1997. [Google Scholar]
- Silva, W.A. Identification of Linear and Nonlinear Aerodynamic Impulse Responses Using Digital Filter Techniques. In Proceedings of the Atomospheric Flight Mechanics, New Orleans, LA, USA, 11–13 August 1997. AIAA Paper 97-3712. [Google Scholar]
- Silva, W.A. Reduced-Order Models Based on Linear and Nonlinear Aerodynamic Impulse Responses. In Proceedings of the CEAS/AIAA/ICASE/NASA Langley International Forum on Aeroelasticity and Structural Dynamics, Williamsburg, VA, USA, 22–25 June 1999; pp. 369–379. [Google Scholar]
- Juang, J.-N.; Pappa, R.S. An Eigensystem Realization Algorithm for Modal Parameter Identification and Model Reduction. J. Guidance Control Dyn. 1985, 8, 620–627. [Google Scholar] [CrossRef]
- Juang, J.-N. Applied System Identification; Prentice-Hall PTR: Upper Saddle River, NJ, USA, 1994. [Google Scholar]
- Silva, W.A.; Raveh, D.E. Development of Unsteady Aerodynamic State-Space Models from CFD-Based Pulse Responses. Presented at the 42nd Structures, Structural Dynamics, and Materials Conference, Seattle, WA, USA, 16–19 April 2001. AIAA Paper No. 2001-1213. [Google Scholar]
- Gaitonde, A.L.; Jones, D.P. Study of Linear Response Identification Techniques and Reduced-Order Model Generation for a 2D CFD Scheme. J. Numer. Methods Fluids 2006, 52, 1367–1402. [Google Scholar] [CrossRef]
- Gaitonde, A.L.; Jones, D.P. Calculations with ERA Based Reduced-Order Aerodynamic Models. In Proceedings of the 24th Applied Aerodynamics Conference, San Francisco, CA, USA, 5–8 June 2006. [Google Scholar]
- Griffiths, L.; Jones, D.P.; Friswell, M.I. Model Updating of Dynamically Time Linear Reduced-Order Models. In Proceedings of the International Forum on Aeroelasticity and Structural Dynamics, Paris, France, 27–30 June 2011. [Google Scholar]
- Fleischer, D.; Breitsamter, C. Efficient Computation of Unsteady Aerodynamic Loads Using Computational Fluid Dynamics Linearized Methods. J. Aircr. 2013, 50, 425–440. [Google Scholar] [CrossRef]
- Xiaoyan, L.; Zhigang, W.; Chao, Y. Aerodynamic Reduced-Order Models Based on Observer Techniques. In Proceedings of the 51st AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Orlando, FL, USA, 12–15 April 2010. [Google Scholar]
- Song, H.; Qian, J.; Wang, Y.; Pant, K.; Chin, A.W.; Brenner, M.J. Development of Aeroelastic and Aeroservoelastic Reduced-Order Models for Active Structural Control. In Proceedings of the 56th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar]
- Ma, Z.; Ahuja, S.; Rowley, C.W. Reduced-Order Models for Control of Fluid Using the Eigensystem Realization Algorithm. Theor. Comput. Fluid Dyn. 2011, 25, 233–247. [Google Scholar] [CrossRef]
- Krist, S.L.; Biedron, R.T.; Rumsey, C.L. CFL3D User’s Manual Version 5.0; Technical Report; NASA Langley Research Center: Hampton, VA, USA, 1997.
- Silva, W.A.; Bartels, R.E. Development of Reduced-Order Models for Aeroelastic Analysis and Flutter Prediction Using the CFL3Dv6.0 Code. J. Fluids Struct. 2004, 19, 729–745. [Google Scholar] [CrossRef]
- Kim, T.; Hong, M.; Bhatia, K.G.; SenGupta, G. Aeroelastic Model Reduction for Affordable Computational Fluid Dynamics-Based Flutter Analysis. AIAA J. 2005, 43, 2487–2495. [Google Scholar] [CrossRef]
- Silva, W.A. Recent Enhancements to the Development of CFD-Based Aeroelastic Reduced Order Models. In Proceedings of the 48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Honolulu, HI, USA, 23–26 April 2007. AIAA Paper No. 2007-2051. [Google Scholar]
- Anderson, W.K. Bonhaus, D.L. An Implicit Upwind Algorithm for Computing Turbulent Flows on Unstructured Grids. Comput. Fluids 1994, 23, 1–21. [Google Scholar] [CrossRef]
- NASA LaRC. FUN3D Manual, v12.9; NASA LaRC: Hampton, VA, USA, 2015. Available online: http://fun3d.larc.nasa.gov (accessed on 21 September 2015).
- Biedron, R.T.; Vatsa, V.N.; Atkins, H.L. Simulation of Unsteady Flows Using an Unstructured Navier-Stokes Solver on Moving and Stationary Grids. In Proceedings of the 23rd AIAA Applied Aerodynamics Conference, Toronto, ON, Canada, 6–9 June 2005. AIAA Paper 2005-5093. [Google Scholar]
- Biedron, R.T.; Thomas, J.L. Recent Enhancements to the FUN3D Flow Solver for Moving-Mesh Applications. In Proceedings of the 47th AIAA Aerospace Sciences Meeting Including The New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 5–8 January 2009; AIAA Paper 2009-1360. Available online: https://arc.aiaa.org/doi/abs/10.2514/6.2009-1360 (accessed on 10 April 2009).
- Juang, J.-N.; Phan, M.; Horta, L.G.; Longman, R.W. Identification of Observer/Kalman Filter Markov Parameters: Theory and Experiments. J. Guid. Control Dyn. 1993, 16, 320–329. [Google Scholar] [CrossRef]
- Eykhoff, P. System Identification: Parameter and State Identification; Wiley Publishers: Hoboken, NJ, USA, 1974. [Google Scholar]
- Ljung, L. System Identification: Theory for the User; Prentice-Hall Publishers: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Zhu, Y. Multivariable System Identification for Process Control; Pergamon Publishers: Oxford, UK, 2001. [Google Scholar]
- Pacheco, R.P.; Steffen, V., Jr. Using Orthogonal Functions for Identification and Sensitivity Analysis of Mechanical Systems. J. Vib. Control 2002, 8, 993–1021. [Google Scholar] [CrossRef]
- Raveh, D.E. Identification of Computational-Fluid-Dynamic Based Unsteady Aerodynamic Models for Aeroelastic Analysis. J. Aircr. 2004, 41, 620–632. [Google Scholar] [CrossRef]
- Silva, W.A.; Ringertz, U.; Stenfelt, G.; Eller, D.; Keller, D.F.; Chwalowski, P. Status of the KTH-NASA Wind-Tunnel Test for Acquisition of Transonic Nonlinear Aeroelastic Data. In Proceedings of the 15th Dynamics Specialists Conference, AIAA SciTech Forum, San Diego, CA, USA, 4–8 January 2016. No. AIAA 2016-2050. [Google Scholar]
- Silva, W.A.; Chwalowski, P.; Wieseman, C.D.; Keller, D.F.; Eller, D.; Ringertz, U. Computational and Experimental Results for the KTH-NASA Wind-Tunnel Model Used for Acquistion of Transonic Nonlinear Aeroelastic Data. In Proceedings of the International Forum on Aeroelasticity and Structural Dynamics, Como, Italy, 26–28 June 2017. [Google Scholar]
- Chwalowski, P.; Silva, W.A.; Wieseman, C.D.; Heeg, J. CFD Model of the Transonic Dynamics Tunnel with Applications. In Proceedings of the International Forum on Aeroelasticity and Structural Dynamics, Como, Italy, 26–28 June 2017. [Google Scholar]
- Silva, W.A.; Chwalowski, P.; Perry, B. Evaluation of Linear, Inviscid, Viscous, and Reduced-Order Modeling Aeroelastic Solutions of the AGARD 445.6 Wing Using Root Locus Analysis. Int. J. Comput. Fluid Dyn. 2014, 28, 122–139. [Google Scholar] [CrossRef]


















© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Silva, W.A. AEROM: NASA’s Unsteady Aerodynamic and Aeroelastic Reduced-Order Modeling Software. Aerospace 2018, 5, 41. https://doi.org/10.3390/aerospace5020041
Silva WA. AEROM: NASA’s Unsteady Aerodynamic and Aeroelastic Reduced-Order Modeling Software. Aerospace. 2018; 5(2):41. https://doi.org/10.3390/aerospace5020041
Chicago/Turabian StyleSilva, Walter A. 2018. "AEROM: NASA’s Unsteady Aerodynamic and Aeroelastic Reduced-Order Modeling Software" Aerospace 5, no. 2: 41. https://doi.org/10.3390/aerospace5020041
APA StyleSilva, W. A. (2018). AEROM: NASA’s Unsteady Aerodynamic and Aeroelastic Reduced-Order Modeling Software. Aerospace, 5(2), 41. https://doi.org/10.3390/aerospace5020041