Investigation of a CubeSat in Orbit Anomaly through Verification on Ground



Abstract
1. Introduction
2. Anomaly Analysis Process
3. In Orbit Anomalies
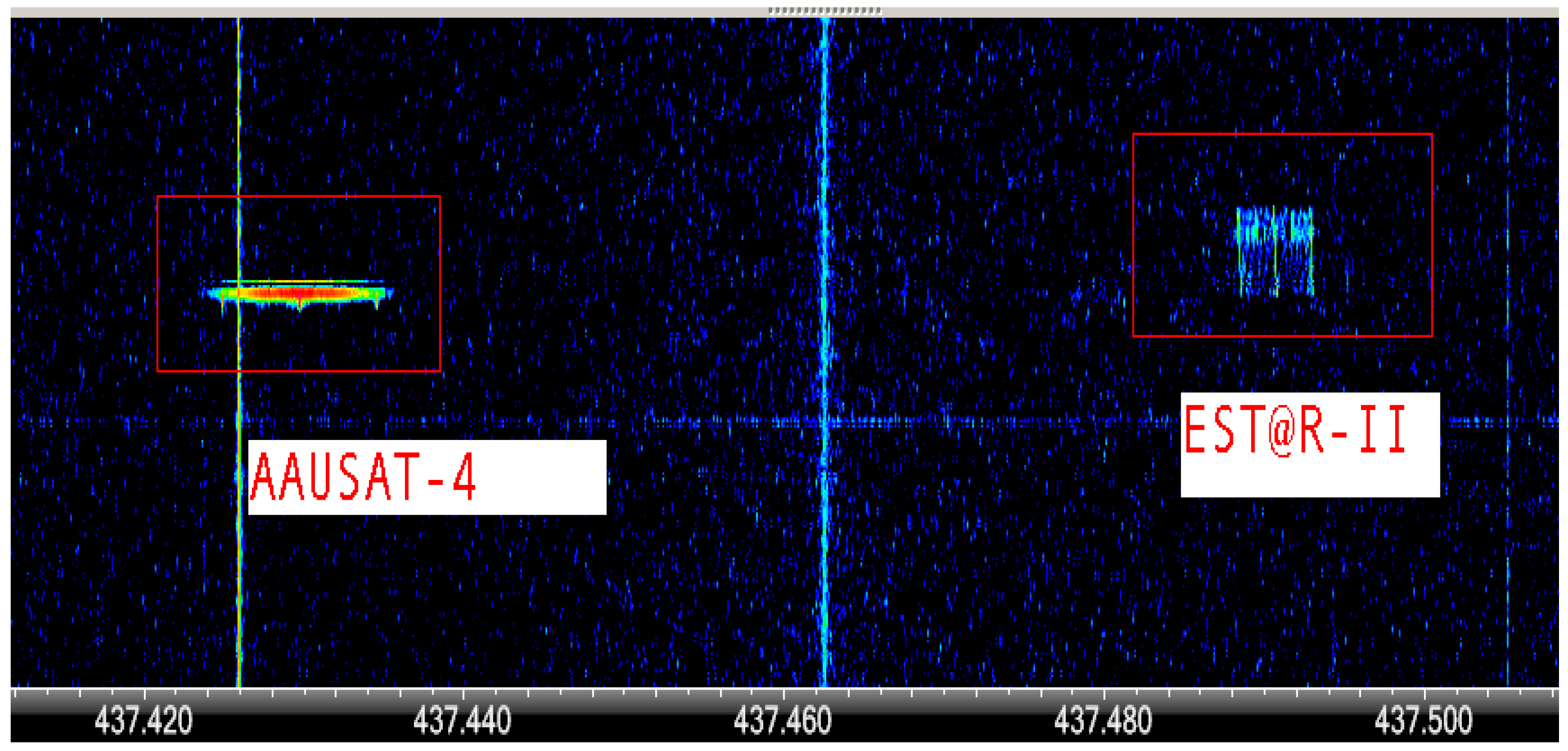
3.1. Anomaly Observation
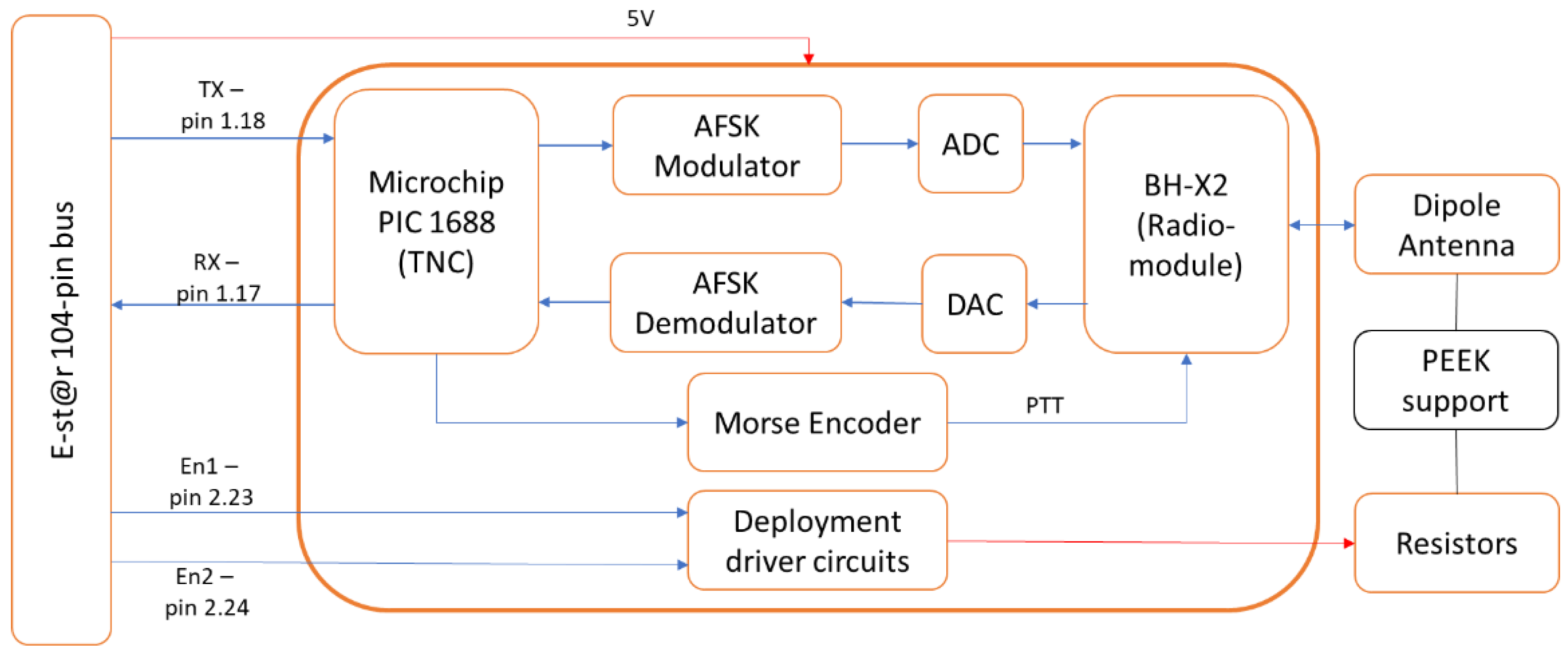
3.2. Description of the System
3.3. Problem Definition
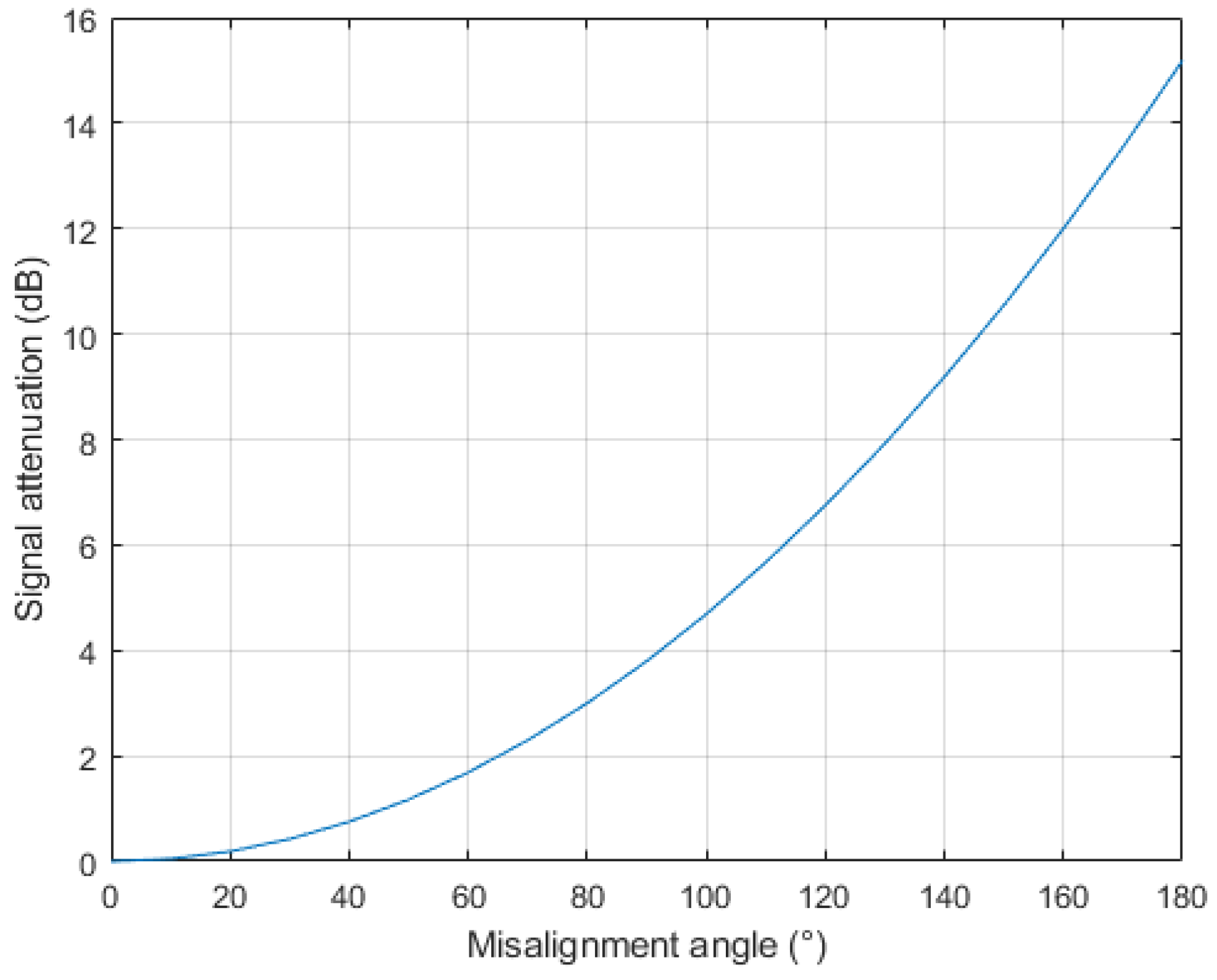
- Incorrect pointing of the CubeSat antenna: Lpr is higher than the estimated.
- HPA failure: Pt is lower than 500 mW.
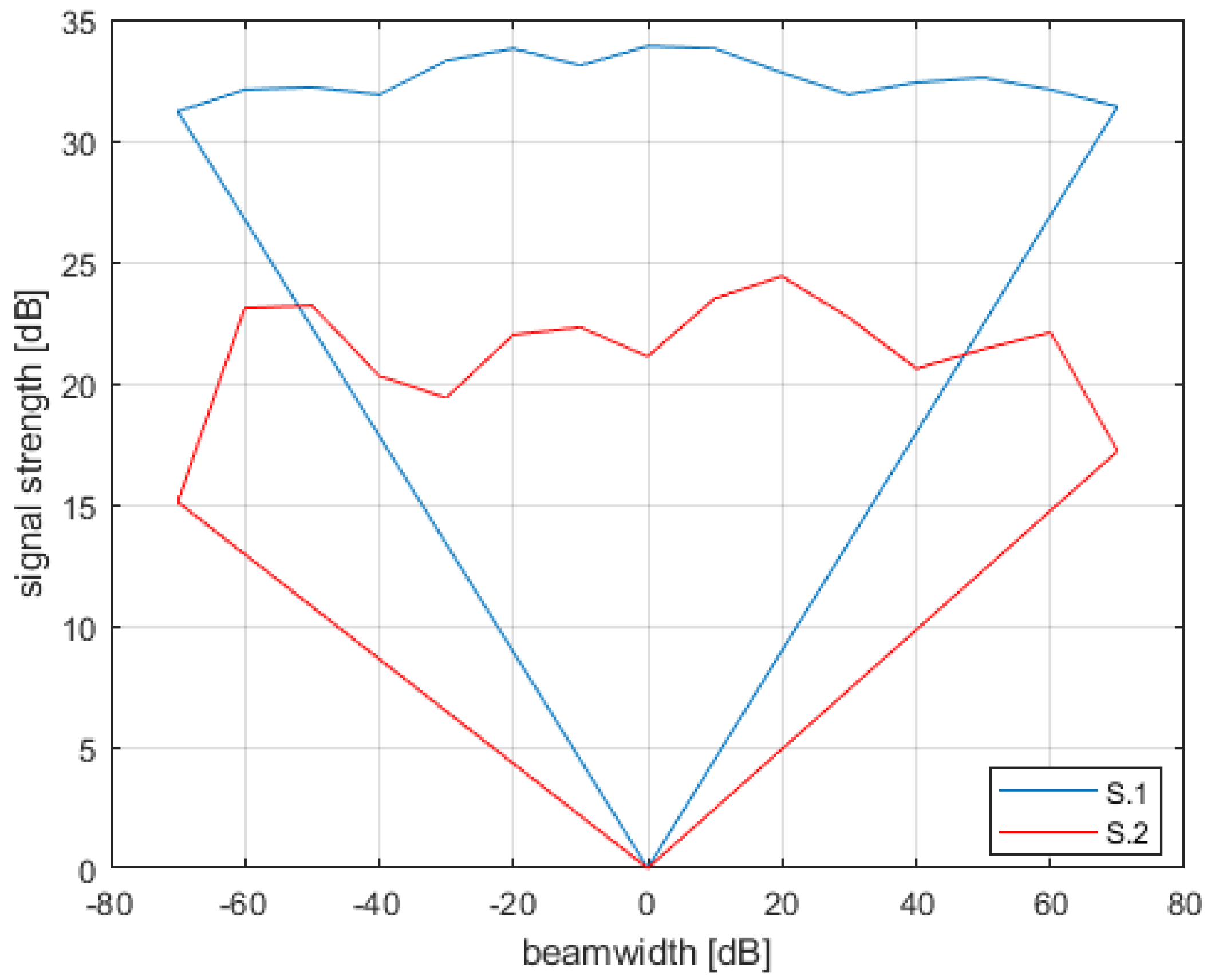
- Low antenna gain and/or inconsistent beamwidth/radiation pattern: Gt is lower and/or the radiation pattern is not conical (absence of an evident main lobe and presence of more and substantial side/back lobes).
- Faulty connection between transceiver and antenna: Lt is higher than expected.
4. Verification Campaign
4.1. Incorrect Pointing of the Antenna
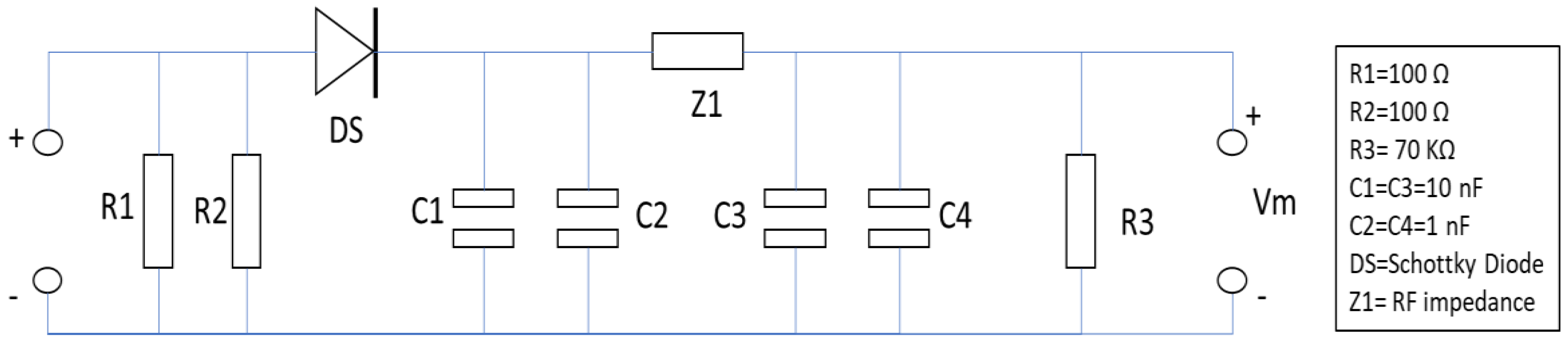
4.2. High-Power Amplifier Failure
4.3. Low Antenna Gain
- Upward: 3.9 °C/min. from −40 °C to + 180 °C
- Downward: 2.5 °C/min. from + 180 °C to −40 °C
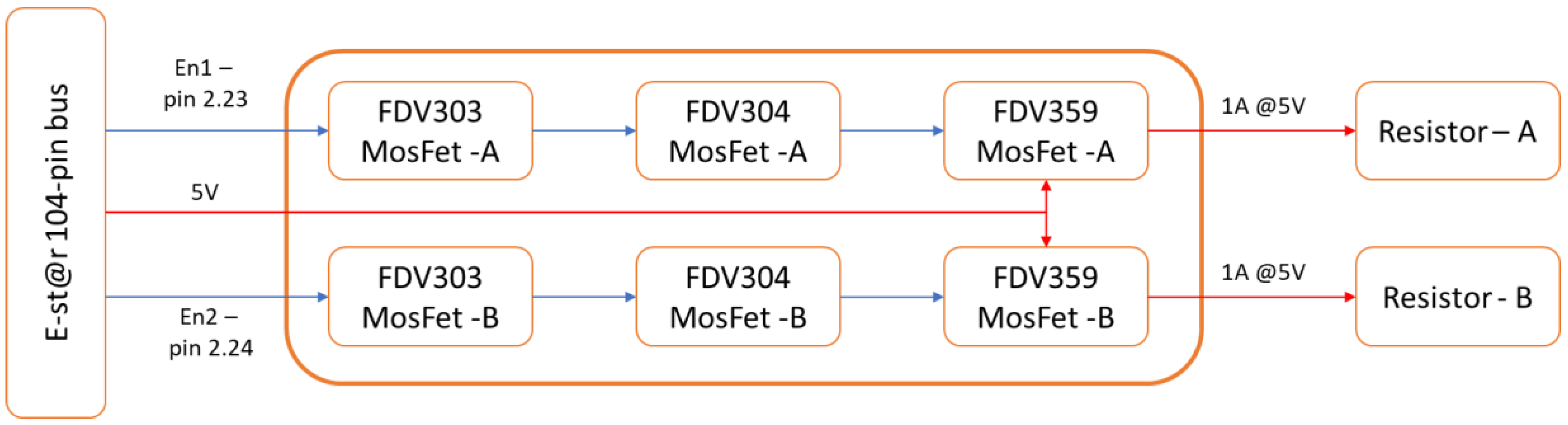
4.4. Incorrect Connection between Transceiver and Antenna
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fly Your Satellite Program ESA. Available online: http://www.esa.int/Education/CubeSats_and_Education_the_Fly_Your_Satellite!_programme (accessed on 30 November 2017).
- NASA’s CubeSat Launch Initiative. Available online: https://www.nasa.gov/directorates/heo/home/CubeSats_initiative (accessed on 28 October 2019).
- Puig-Suari, J.; Turner, C.; Ahlgren, W. Development of the standard CubeSat deployer and a CubeSat class PicoSatellite. In Proceedings of the 2011 IEEE Aerospace Conference, Big Sky, MT, USA, 10–17 March 2001; pp. 347–355. [Google Scholar]
- Selva, D.; Krejci, D. A survey and assessment of the capabilities of Cubesats for Earth observation. Acta Astronaut. 2010, 74, 50–68. [Google Scholar] [CrossRef]
- Rodriguez, C.; Boiardt, H.; Bolooki, S. CubeSat to commercial intersatellite communications: Past, present and future. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016; pp. 1–15. [Google Scholar]
- Willis, J.; Walton, P.; Wilde, D.; Long, D. Miniaturized Solutions for CubeSat Servicing and Safety Requirements. IEEE J. Miniat. Air Space Syst. 2019, 1–7. [Google Scholar] [CrossRef]
- Poghosyan, A.; Golkar, A. CubeSat evolution: Analyzing CubeSat capabilities for conducting science missions. Prog. Aerosp. Sci. 2017, 88, 59–83. [Google Scholar] [CrossRef]
- Zannoni, M.; Tommei, G.; Modenini, D.; Tortora, P.; Mackenzie, R.; Scoubeau, M.; Herfort, U.; Carnelli, I. Radio science investigations with the Asteroid impact mission. Adv. Space Res. 2018, 62, 2273–2289. [Google Scholar] [CrossRef]
- Kerner, H.; Hardgrove, C.; Bell, J.; Amzler, R.; Babuscia, A.; Beasley, M.; Brunham, Z.; Cheung, K.M. The Lunar Polar Hydrogen Mapper (LunaH-Map) CubeSat Mission. In Proceedings of the Small Satellite Conference, Logan, UT, USA, 6–11 August 2016. [Google Scholar]
- Tsitas, S.R.; Kingston, J. 6U CubeSat commercial applications. Aeronaut. J. 2012, 116, 189–198. [Google Scholar] [CrossRef]
- Pelton, J.; Finkleman, D. Overview of Small Satellite Technology and Systems Design. In Handbook of Small Satellites: Technology, Design, Manufacture, Applications, Economics and Regulation; Springer: Cham, Switzerland, 2012; Volume 1, p. 21. [Google Scholar]
- Viscio, M.A.; Viola, N.; Corpino, S.; Stesina, F.; Circi, C.; Fineschi, S.; Fumenti, F. Interplanetary, Cubesat mission to earth-sun libration point for space weather evaluation. In Proceedings of the 64th International Astronautical Congress, Beijing, China, 23–27 September 2013; Volume 2, pp. 1324–1332. [Google Scholar]
- Leveque, K.; Cuseo, Z.; King, J.; Babb, R.; Carleton, L. Unlocking the Next Generation of Nano-Satellite Missions with 320 Mbps Ka-Band Downlink: On-Orbit Results. In Proceedings of the 33rd Small Satellite Conference, Logan, UT, USA, 3–8 August 2019. [Google Scholar]
- Modenini, D. Attitude Determination from Ellipsoid Observations: A Modified Orthogonal Procrustes Problem. J. Guid. Navig. Dyn. 2019, 41, 2324–2326. [Google Scholar] [CrossRef]
- Ofodile, I.; Kütt, J.; Kivastik, J.; Nigol, M.K.; Parelo, A.; Ilbis, E.; Ehrpais, H.; Slavinskis, A. ESTCube-2 Attitude Determination and Control: Step Towards Interplanetary CubeSats. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–12. [Google Scholar]
- Bowen, J.; Villa, M.; Williams, A. CubeSat based Rendezvous, Proximity Operations, and Docking in the CPOD Mission. In Proceedings of the 29th AIAA/USU Conference on Small Satellites, Logan, UT, USA, 8–13 August 2015. [Google Scholar]
- Wang, J.; Zhang, R.; Yuan, J.; Luo, J. Multi-CubeSat Relative Position and Attitude Determination Based on Array Signal Detection in Formation Flying. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3378–3393. [Google Scholar] [CrossRef]
- Conigliaro, C.; Calvi, D.; Franchi, L.; Stesina, F.; Corpino, S. Design and analysis of an innovative cubesat thermal control system for biological experiment in lunar environment. In Proceedings of the 69th International Astronautical Congress, Bremen, Germany, 1–5 October 2018. [Google Scholar]
- Claricoats, J.; Dakka, S.M. Design of Power, Propulsion, and Thermal Sub-Systems for a 3U CubeSat Measuring Earth’s Radiation Imbalance. Aerospace 2018, 5, 63. [Google Scholar] [CrossRef]
- Lemmer, K. Propulsion for CubeSats. Acta Astronaut. 2017, 134, 231–243. [Google Scholar] [CrossRef]
- Tummala, A.R.; Dutta, A. An Overview of Cube-Satellite Propulsion Technologies and Trends. Aerospace 2017, 4, 58. [Google Scholar] [CrossRef]
- Dubos, G.F.; Castet, J.F.; Saleh, J.H. Statistical reliability analysis of satellites by mass category: Does spacecraft size matter? Acta Astronaut. 2016, 67, 584–595. [Google Scholar] [CrossRef]
- Spangelo, S.C.; Kaslow, D.; Delp, C.; Cole, B.; Anderson, L.; Fosse, E.; Gilbert, B.S.; Hartman, L.; Kahn, T.; Cutler, J. Applying model based systems engineering (MBSE) to a standard CubeSat. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2012. [Google Scholar]
- Menchinelli, A.; Ingiosi, F.; Pamphili, L.; Marzioli, P.; Patriarca, R.; Costantino, F.; Piergentili, F. A Reliability Engineering Approach for Managing Risks in CubeSats. Aerospace 2018, 5, 121. [Google Scholar] [CrossRef]
- Tiseo, B.; Quaranta, V.; Bruno, G.; Sisinni, G. Tailoring of ECSS Standard for Space Qualification Test of CubeSat Nano-Satellite. Int. J. Aerosp. Mech. Eng. 2019, 13, 295–302. [Google Scholar]
- Venturini, C.; Braun, B.; Hinkley, D.; Berg, G. Improving Mission Success of CubeSats. In Proceedings of the 32rd Small Satellite Conference, Logan, UT, USA, 3–8 August 2018. [Google Scholar]
- Stesina, F.; Corpino, S.; Feruglio, L. An in-the-loop simulator for the verification of small space platforms. Int. Rev. Aerosp. Eng. 2017, 10, 50–60. [Google Scholar] [CrossRef]
- Kiesbye, J.; Messmann, D.; Preisinger, M.; Reina, G.; Nagy, D.; Schummer, F.; Mostad, M.; Kale, T.; Langer, M. Hardware-In-The-Loop and Software-In-The-Loop Testing of the MOVE-II CubeSat. Aerospace 2019, 6, 130. [Google Scholar] [CrossRef]
- Farissi, M.S.; Carletta, S.; Nascetti, A.; Teofilatto, P. Implementation and Hardware-In-The-Loop Simulation of a Magnetic Detumbling and Pointing Control Based on Three-Axis Magnetometer Data. Aerospace 2019, 6, 133. [Google Scholar] [CrossRef]
- Bonsu, B.; Masui, H.; Cho, M. Demonstration of Lean Satellite (1U CubeSat) Testing Using PeTT Vacuum Chamber. In Proceedings of the 2019 9th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, 11–14 June 2019; pp. 959–966. [Google Scholar]
- Lovascio, A.; D’Orazio, A.; Centonze, V. Characterization of a COTS-Based RF Receiver for Cubesat Applications. Sensors 2020, 20, 776. [Google Scholar] [CrossRef] [PubMed]
- Stesina, F. Validation of a Test Platform to Qualify Miniaturized Electric Propulsion Systems. Aerospace 2019, 6, 99. [Google Scholar] [CrossRef]
- Available online: http://www.jhberkandassociates.com/systems_failure_analysis.htm (accessed on 11 March 2020).
- Stesina, F.; Corpino, S. Analysis of the communication anomaly during e-st@r-II mission operations. In Proceedings of the 68th International Astronautical Congress, Adelaide, Australia, 25–29 September 2017. [Google Scholar]
- Berthoud, L.; Swartwout, M.; Cutler, J.; Klumpar, D.; Larsen, J.A.; Nielsen, J.D. University CubeSat Project Management for Success 33rd Conference on Small Satellites. In Proceedings of the Conference on Small Satellites, Logan, UT, USA, 3–8 August 2019. [Google Scholar]
- Stesina, F.; Corpino, S.; Mozzillo, R.; Obiols Rabasa, G. Design of the active attitude determination and control system for the E-st@r CUBESAT. In Proceedings of the 63rd International Astronautical Congress, Naples, Italy, 1–5 October 2012. [Google Scholar]
- Busso, A.; Mascarello, M.; Corpino, S.; Stesina, F.; Mozzillo, R. The communication module on board e-st@r-II Cubesat. In Proceedings of the 7th ESA International Workshop on Tracking, Telemetry and Command Systems for Space Applications, Noordwijk, The Netherlands, 13–16 September 2016. [Google Scholar]
- Obiols-Rabasa, G.; Corpino, S.; Mozzillo, R.; Stesina, F. Lessons learned of a systematic approach for the E-ST@R-II CUBESAT environmental test campaign. In Proceedings of the 66th International Astronautical Congress, Jerusalem, Israel, 1–5 October 2015. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module | Measured Voltage (Vm) (mW) | Estimated Power (Pt) (mW) |
|---|---|---|
| BHX2 - Spare-1 | 223.0 | 497.3 |
| BHX2 - Spare-2 | 223.2 | 498.2 |
| BHX2 - Spare-3 | 222.8 | 496.4 |
| Config. | Meas. 1 | Meas. 2 | Meas. 3 |
|---|---|---|---|
| C.1 | 45.4 dB | 47.1 dB | 46.4 dB |
| C.2 | 30.1 dB | 29.5 dB | 31.5 dB |
| C.3 | No signal | No signal | No signal |
| Test #. | Conditions (°C) | Time of the Deployment (min) | Time of the First Packet Reception (min) |
|---|---|---|---|
| L.1 Both line connected | TL = 27.2 | 0:30:12 | 0:32:45 |
| L.2 Both line connected | TL = 28.5 | 0:30:12 | 0:32:45 |
| L.3 Both line connected | TL = 27.6 | 0:30:13 | 0:32:45 |
| L.4 Both line connected | TL = 27.2 | 0:30:12 | 0:32:46 |
| L.5 Line2 disconnected | TL= 27.4 | 0:30:12 | 0:32:45 |
| L.6 Line2 disconnected | TL = 28.4 | 0:30:12 | 0:32:46 |
| L.7 Line2 disconnected | TL = 27.5 | 0:30:12 | 0:32:46 |
| L.8 Line1 disconnected | TL = 28.8 | 0:30:22 | 0:32:45 |
| L.9 Line1 disconnected | TL = 27.7 | 0:30:23 | 0:32:46 |
| L.10 Line1 disconnected | TL = 27.0 | 0:30:22 | 0:32:45 |
| C.1 Both line connected | TTC = –26.1 Tch = −31.33 | 0:30:13 | 0:32:46 |
| C.2 Line2 disconnected | TTC = −25.8 Tch = –30.76 | 0:30:13 | 0:32:45 |
| C.3 Line1 disconnected | TTC = –26.5 Tch = –31.12 | 0:30:23 | 0:32:46 |
| H.1 Both line connected | TTC = 56.0 Tch = 61.49 | 0:30:12 | 0:32:46 |
| H.2 Line2 disconnected | TTC = 55.7 Tch = 60.41 | 0:30:12 | 0:32:46 |
| H.3 Line1 disconnected | TTC = 56.5 Tch = 62.11 | 0:30:21 | 0:32:45 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stesina, F.; Corpino, S. Investigation of a CubeSat in Orbit Anomaly through Verification on Ground. Aerospace 2020, 7, 38. https://doi.org/10.3390/aerospace7040038
Stesina F, Corpino S. Investigation of a CubeSat in Orbit Anomaly through Verification on Ground. Aerospace. 2020; 7(4):38. https://doi.org/10.3390/aerospace7040038
Chicago/Turabian StyleStesina, Fabrizio, and Sabrina Corpino. 2020. "Investigation of a CubeSat in Orbit Anomaly through Verification on Ground" Aerospace 7, no. 4: 38. https://doi.org/10.3390/aerospace7040038
APA StyleStesina, F., & Corpino, S. (2020). Investigation of a CubeSat in Orbit Anomaly through Verification on Ground. Aerospace, 7(4), 38. https://doi.org/10.3390/aerospace7040038