Review of Conflict Resolution Methods for Manned and Unmanned Aviation †




Abstract
1. Introduction
2. Taxonomy for Conflict Detection & Resolution Methods
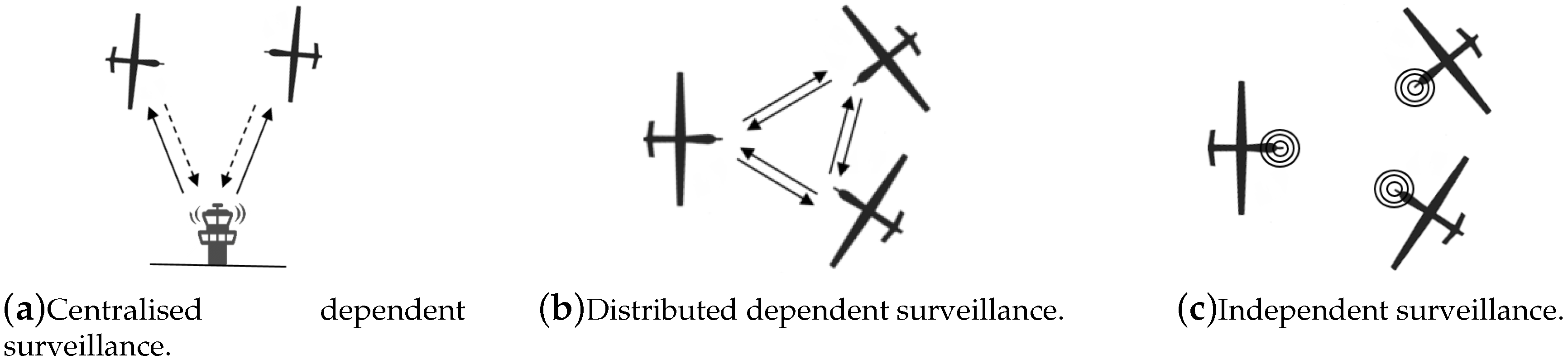
2.1. Surveillance
2.2. Trajectory Propagation
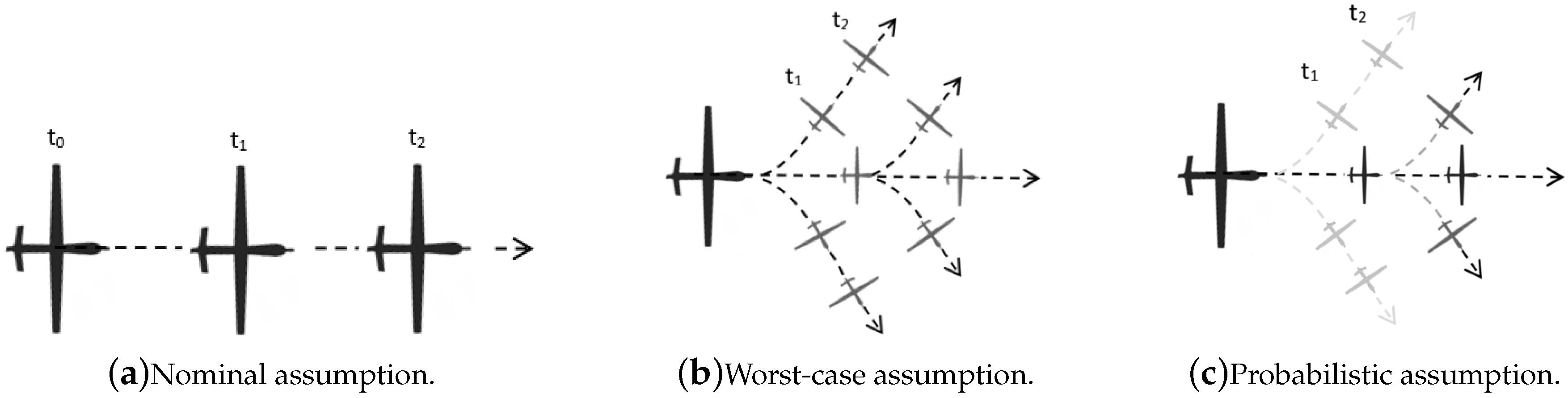
2.3. Predictability Assumption
2.4. Control
2.5. Method Categories
2.6. Multi-Actor Conflict Resolution
2.7. Avoidance Planning
2.8. Avoidance Manoeuvre
2.9. Obstacle Types
2.10. Optimization
2.11. Reviewed CD&R Models
3. Experiment: Direct Comparison of CR Methods
3.1. Apparatus and Aircraft Models
3.2. Independent Variables
3.2.1. Traffic Density
3.2.2. Conflict Resolution Methods
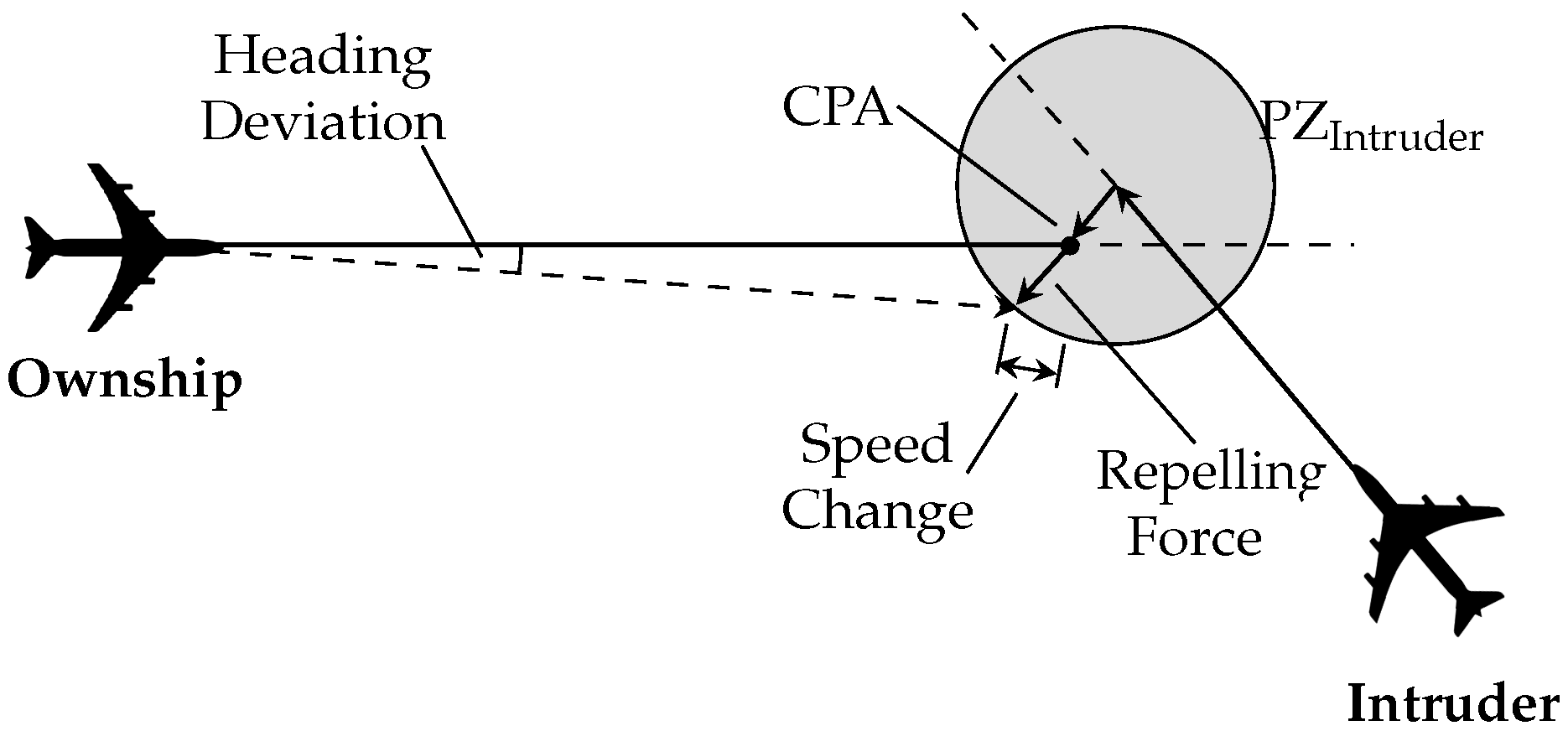
- (a)
- Potential Field [21,140]: In this approach, predicted conflicting aircraft positions are represented by `charged particles’ which simultaneously push and are pushed away from the conflicting aircraft. In the evaluation in this paper, this category of CR methods will be represented by a `bare’ version of the Modified Voltage Potential (MVP) method [21], for which the geometric resolution is displayed in Figure 8. For conflicting aircraft, the predicted positions at the closest point of approach (CPA) ‘repel’ each other. This ‘repelling force’ is converted to a displacement of the predicted position at CPA, in a way that the minimum distance will be equal to the required minimum separation between aircraft. Such displacement results in a new advised heading and speed, in the direction that increases the predicted CPA. Choosing this direction for each resolution ensures that the MVP is implicitly coordinated for 2-aircraft conflicts; both aircraft in a conflict will take complimentary measures to evade the other. In case of multi-aircraft conflicts, resolution vectors are summed for each conflict pair.This method has the advantage of simplicity; the resulting calculations are computationally light, and the geometric representation allows other possible constraints to be taken into account easily. On the other hand, because resolutions are solely based on the conflict geometry, they may oppose the desired flight direction as proposed by the flight plan.
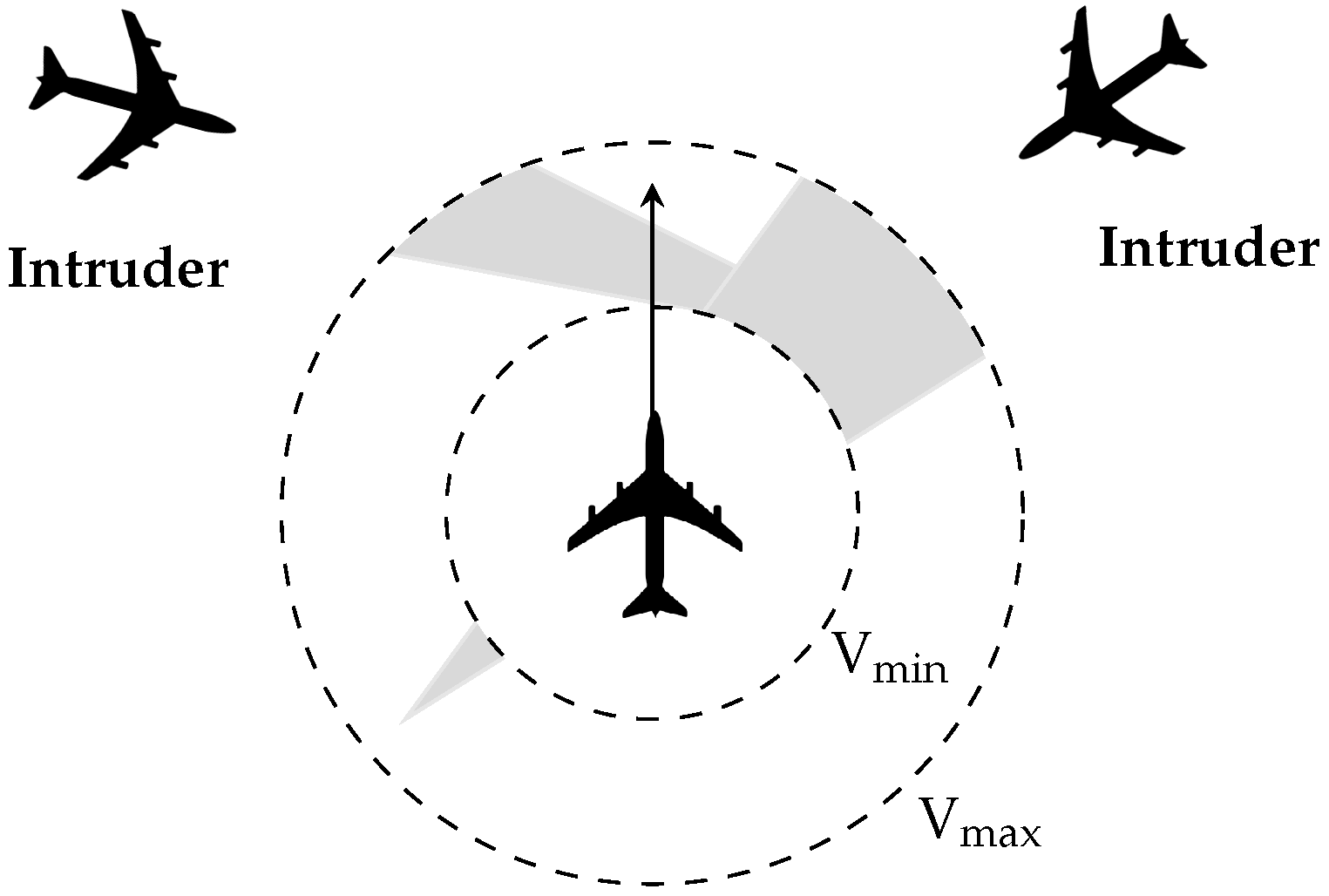
- (b)
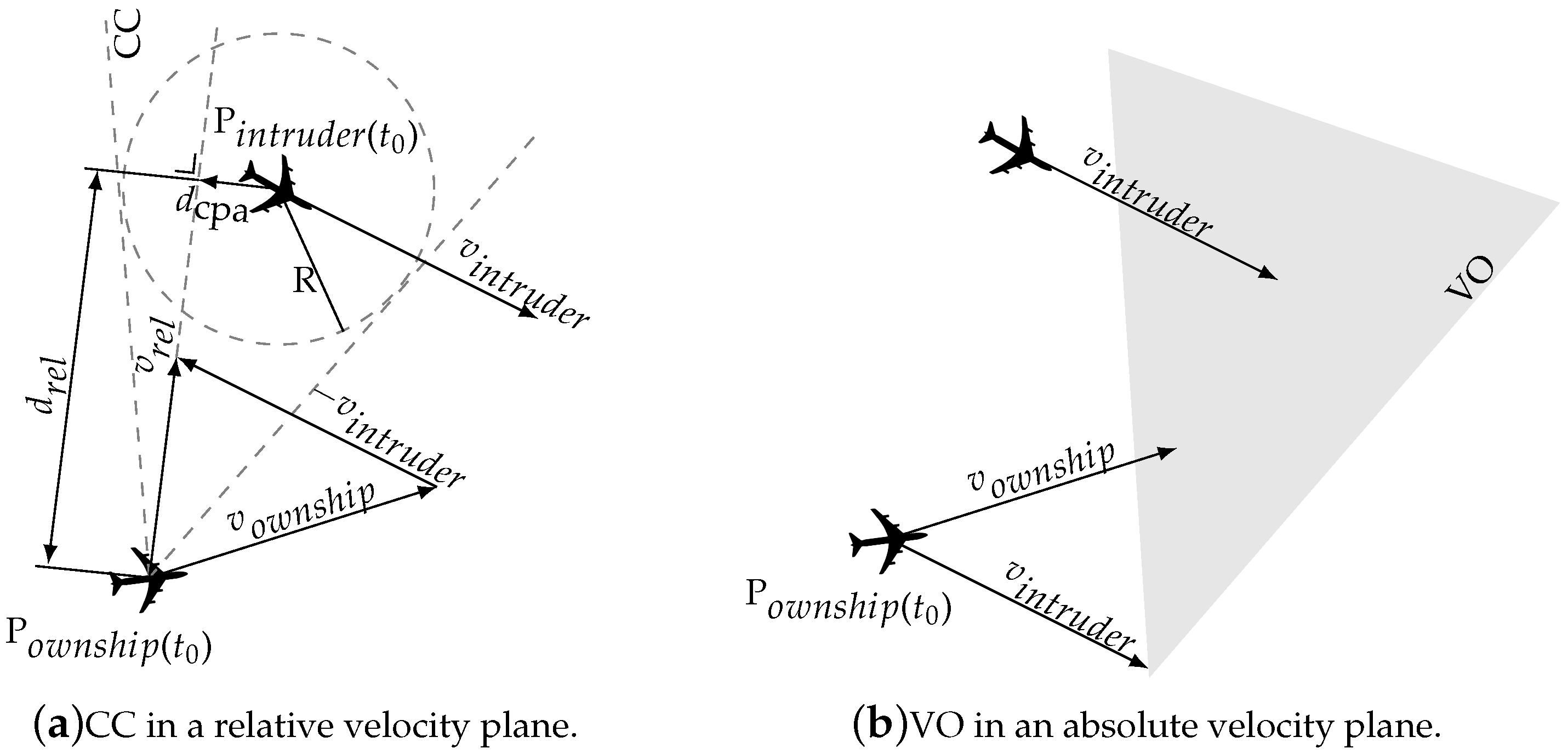
- Solution Space [31,114]: The VO theory is used in combination with kinematic constraints to determine a set of reachable, conflict-free velocity vectors, and a set of reachable, conflicting velocity vectors. These two sets of velocities together form the solution space. Figure 9 shows this velocity space for aircraft: Two concentric circles, representing the minimum and maximum velocities of an aircraft, bound all reachable combinations of heading and speed. Within this reachable velocity space, VOs are constructed for each proximate aircraft, each representing the set of reachable heading/velocity combinations that would result in a conflict with the respective aircraft. When all relevant VOs are subtracted from the set of reachable velocities, what remains is the set of reachable, conflict-free heading/speed combinations. Solution space CR methods determine resolution manoeuvres by selecting heading/speed combinations from this set of conflict-free, reachable velocities. As a result, these methods provide resolutions that are able to solve multiple conflicts simultaneously. In two-aircraft situations, these methods behave similarly to potential field VO methods. In multi-aircraft situations they act as described above. Implicit coordination is also an issue for these methods in multi-aircraft conflicts, and additional coordination rules are required in these situations [30].The CR algorithm herein used is the Solution Space Diagram (SSD) method as implemented by Balasooriyan [30]. For computation of this model, the VOs and the circles delimiting velocity performance are inserted into an existing polygon clipper library [141], which is responsible for finding the set of spaces within the velocity limits that do not intersect the VOs. From this set of spaces, the `shortest-way-out` manoeuvre (i.e., shortest speed/heading deviation) is picked.
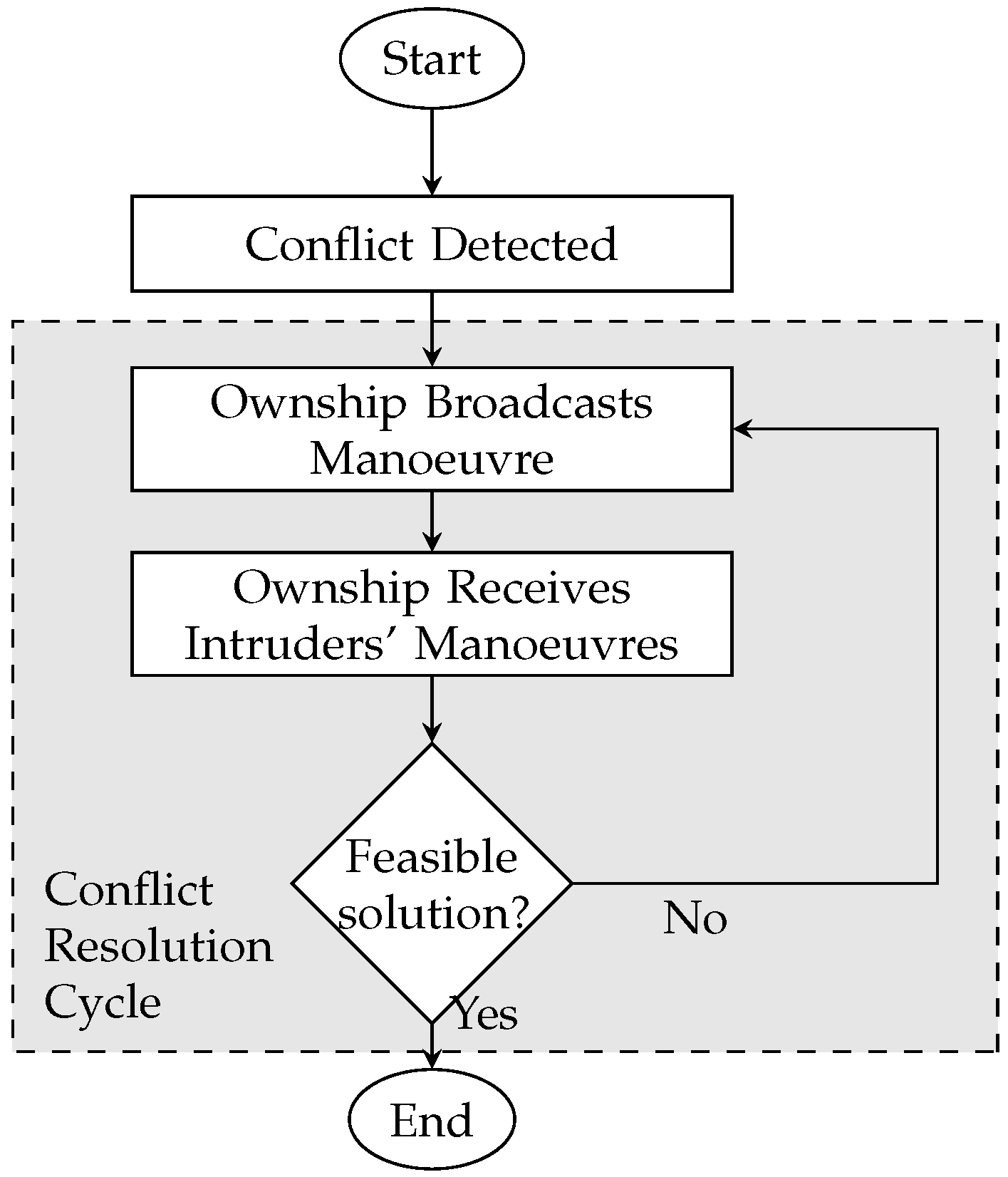
- (c)
- Explicit coordination: This coordination works on the base that aircraft communicate their intention and thus there is no uncertainty regarding their future movement. Here, we use a negotiation approach where each aircraft sends its deconflicting policy to intruders until all broadcast policies result in a global solution. We assume a communication cycle similar to Yang [33], displayed in Figure 10. This was used due to its satisfactory performance in dealing with complex conflict scenarios as demonstrated by the authors.Two aircraft share information when they are in a pairwise conflict; `neighbours’ is the set of intruders the ownship is in conflict with. Aircraft work on the assumption that each aircraft primarily acts towards avoiding losses of minimum separation. First, each aircraft finds a set of conflict-free avoidance manoeuvres. It must also be guaranteed that the manoeuvres within this set will not create new conflicts with other nearby aircraft. This set of solutions is found by identifying the safe interval between heading/speed displacements that cross the edge of intruders’ protected zone. Within this set, a preference for a more significant heading or speed change is based on the aircraft’s own policy; the ultimate goal is to achieve an optimal solution for all aircraft. Each aircraft then identifies the preferred avoidance manoeuvre and broadcasts it to the local neighbours.Once an aircraft receives the neighbours’ manoeuvres, it will verify whether all conflicts are resolved. If so, communication is terminated and the aircraft adopts the previously computed avoidance manoeuvre. Otherwise, aircraft use the received intent information from the neighbours to update the set of conflict-free solutions. A new avoidance manoeuvre is picked from this set; however, now preference is for a manoeuvre within the smallest variation from the previously broadcast manoeuvre in an attempt to converge faster to a solution.In a real-world situation, the time delay between generation and reception of a message is crucial. Studies, such as Yang [33], focus on optimizing the convergence to an agreement and demonstrating that a reduced number of negotiation cycles is required to achieve a robust solution. Our objective, however, is to see how the method behaves within this limited number of negotiation iterations. Yang [33] obtained an average number of iterations below five, albeit for smaller traffic densities. We chose to use this value to limit computational effort. However, it should be noted that a higher limit could favor more robust avoidance manoeuvres.
- (d)
- Sequential cost: In which a single agent is responsible for redirecting aircraft. It it assumed that aircraft will follow the guidelines set by this agent and thus uncertainty is reduced. At each update step, if conflicts are found, conflicting aircraft are redirected towards preventing loss of separation. We follow a sequential approach, setting an order based on the time to loss of separation. Note that the aircraft order can be defined over multi-criteria and will have an impact on the final trajectories. With each aircraft, the possible paths are considered; these are a discrete set of possible heading/speed changes restricted by the aircraft’s performance range.The cost for each trajectory is calculated and the path with the lowest cost is chosen. The cost definition used in the simulations herein performed is similar to Hao’s [74]:where represents the variation of the total length of the path, the change in velocity, and D the distance to intruders. Lastly, a penalty value P is used to add an extra cost to trajectories which cross an intruder’s PZ, as to make these more expensive and, therefore, less desirable. The weight coefficients, , , and indicate the weights given to the path length variation, to the change in velocity, and to the distance to intruders, respectively. The value of the weight coefficients denotes their importance. If, for example, a lower fuel consumption is favoured over distance to threats, then and should be given higher values, as to make an increment in flight path or speed variation significantly expensive. When summed, the weight coefficients are equal to one. Note that other properties could be added to the cost equation according to preference.The chosen weights naturally have an influence on the overall results. When prioritization is set over efficiency, it might have a negative effect on safety and vice-versa. In our work, we chose to emphasize lower fuel consumption, focusing on smaller nominal trajectory deviations. A penalty value for losses of separation is used, proportionally to its severity. The same weights were used both for manned and unmanned aviation, with the purpose of observing possible differences in performance.
4. Experimental Design and Procedure
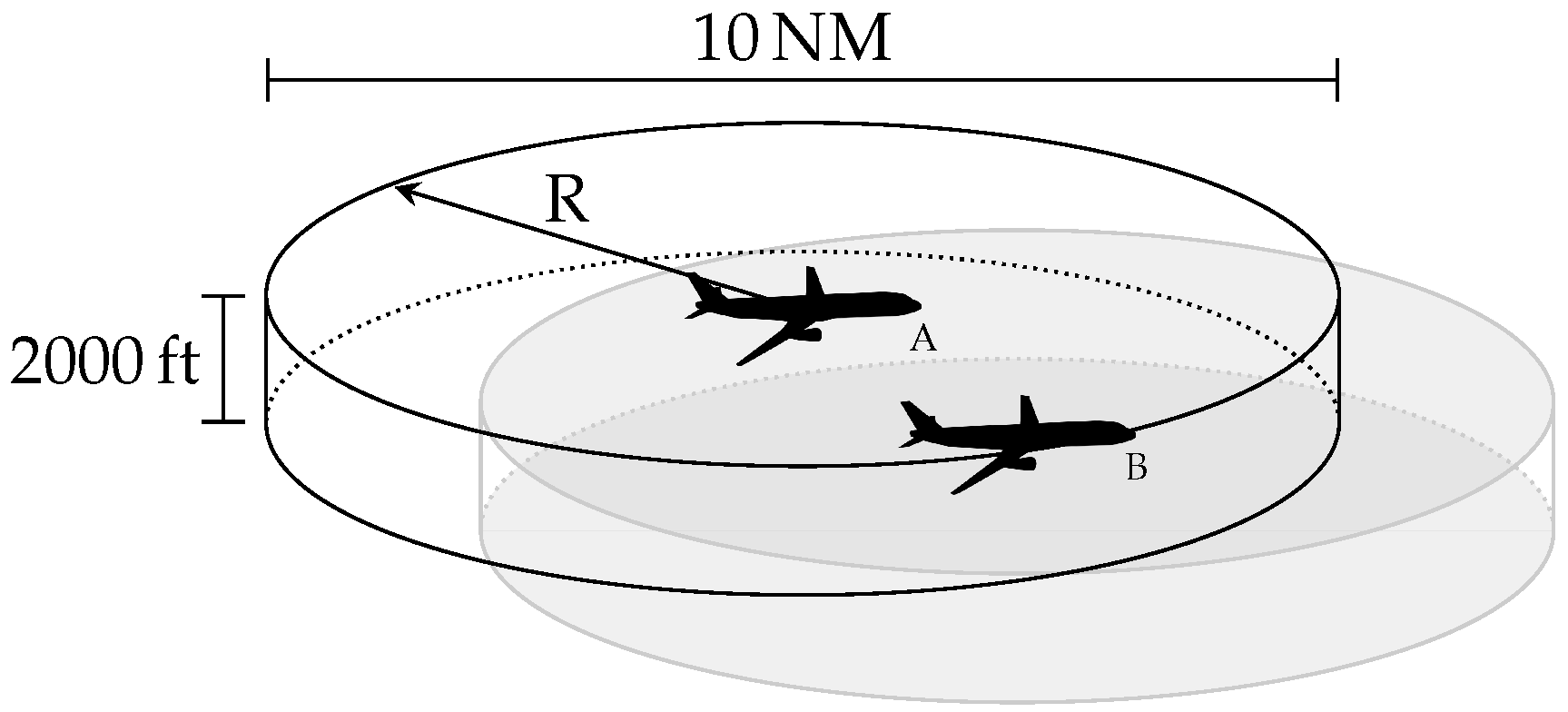
4.1. Minimum Separation
4.2. Conflict Detection
4.3. Simulation Scenarios
4.4. Dependent Measures
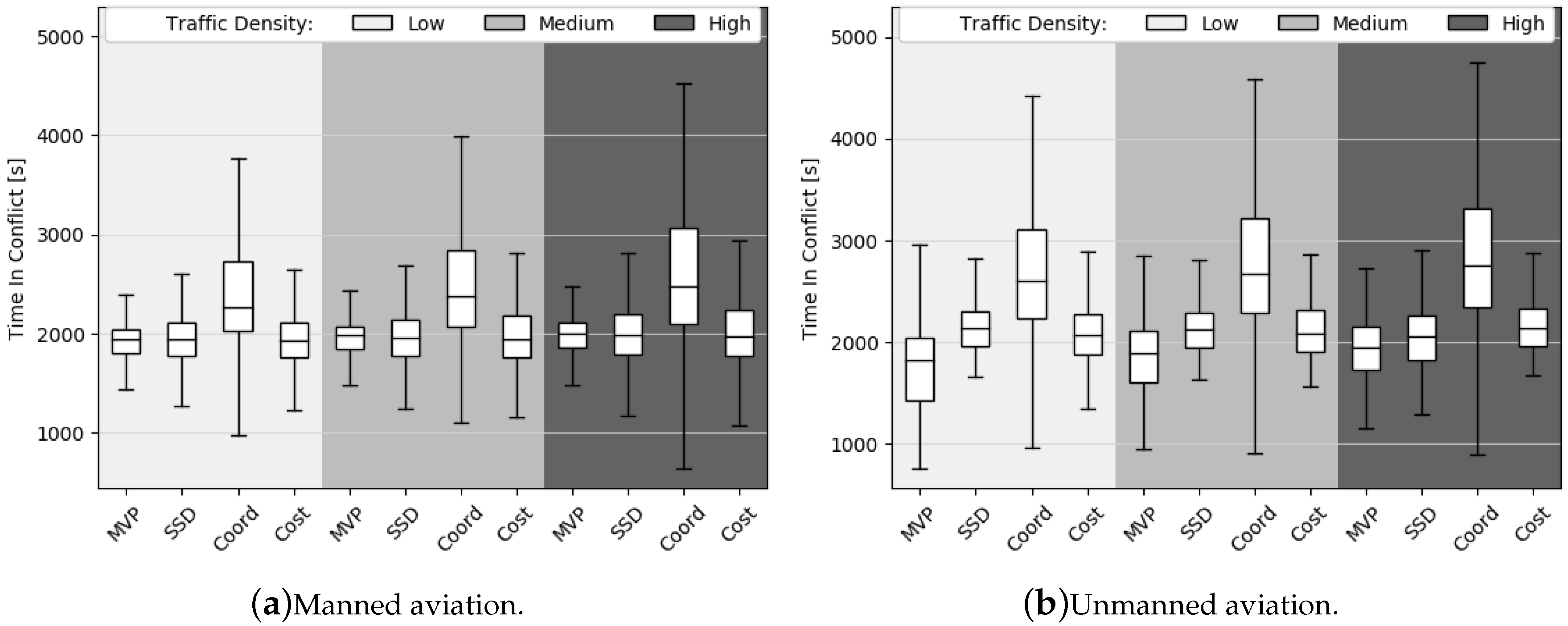
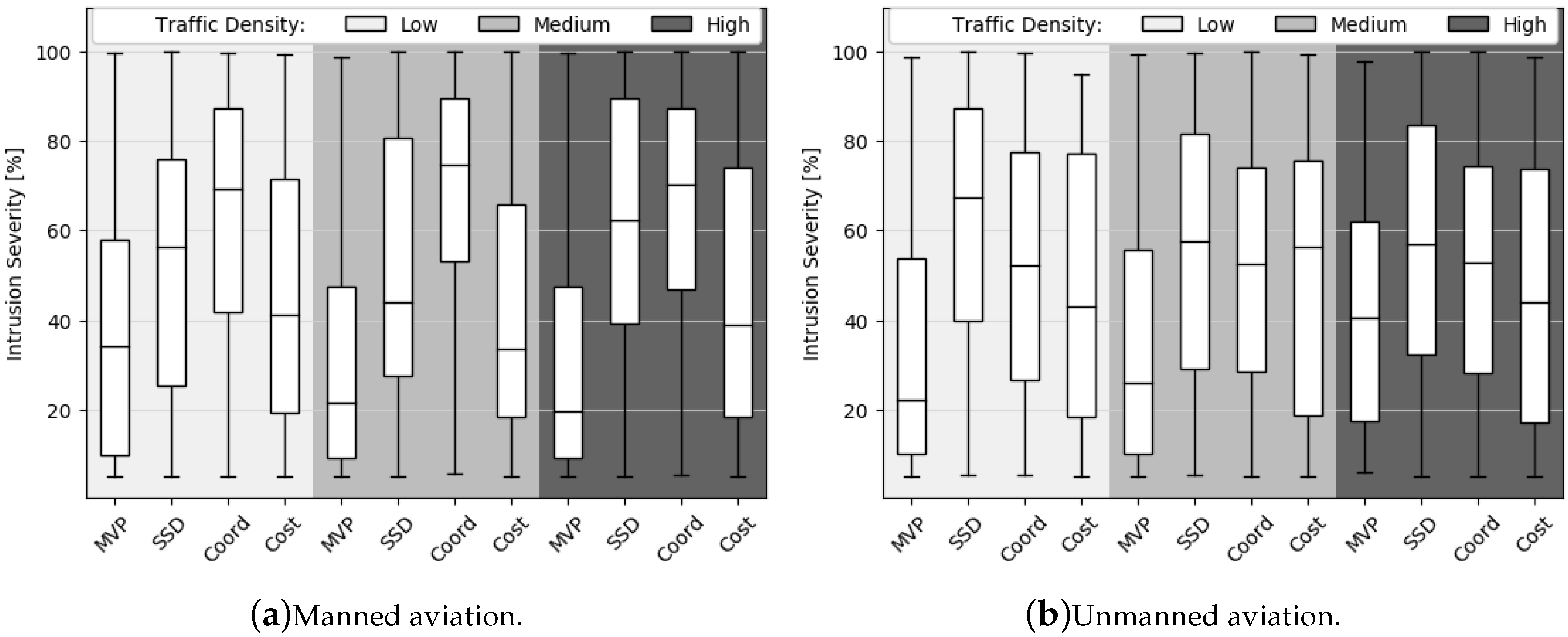
4.4.1. Safety Analysis
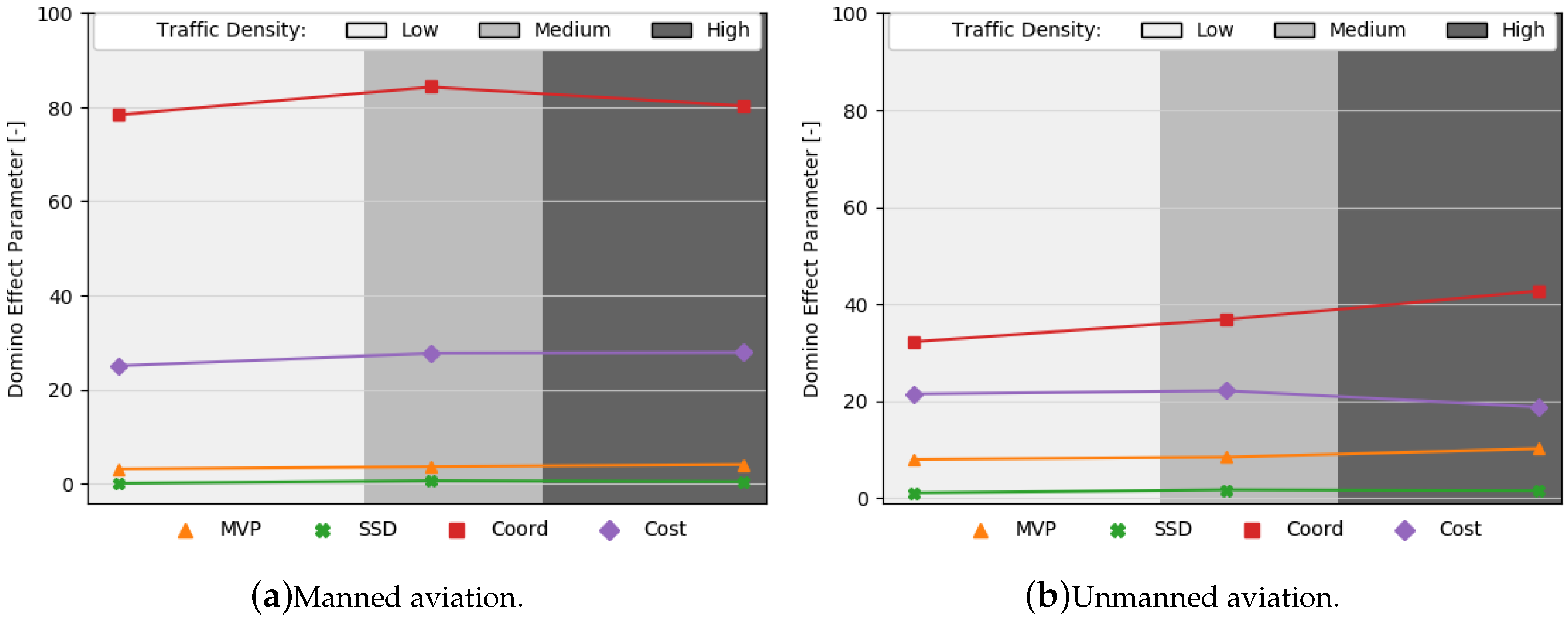
4.4.2. Stability Analysis
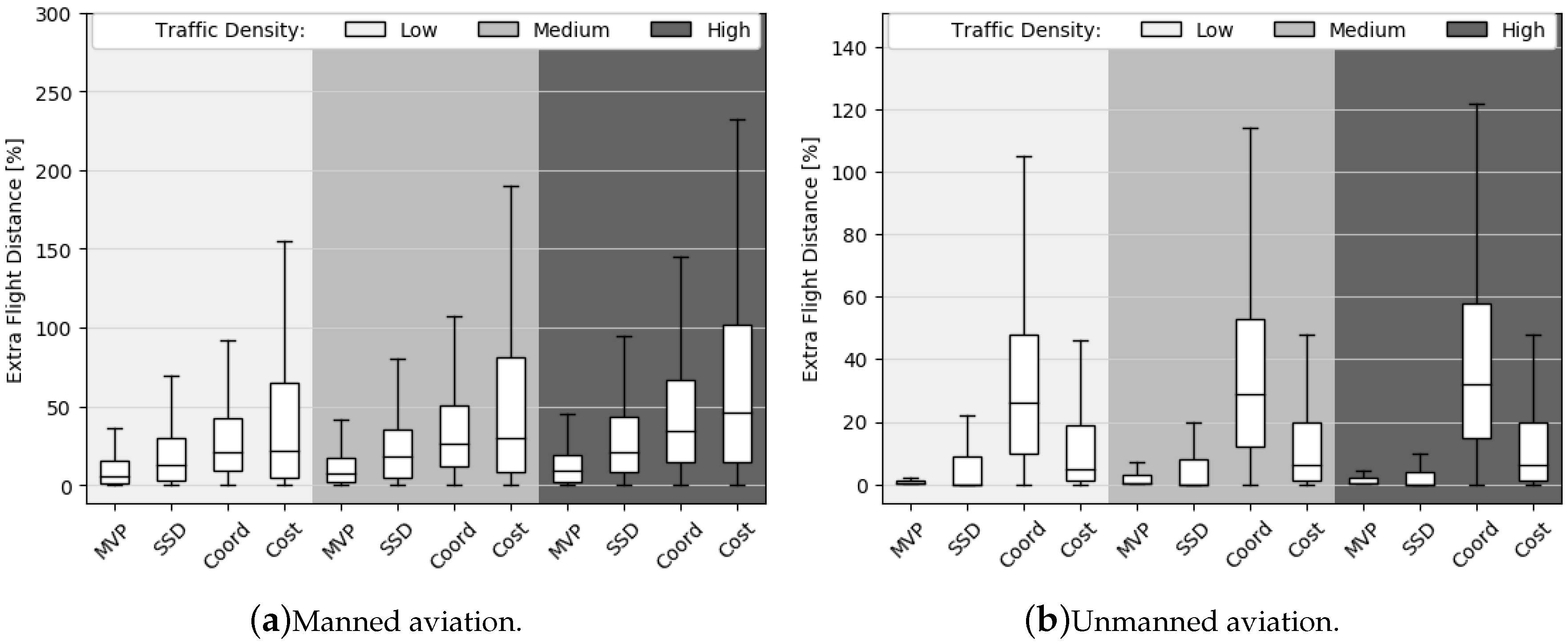
4.4.3. Efficiency Analysis
5. Experimental Hypotheses
6. Experimental Results
6.1. Safety Analysis
6.2. Stability Analysis
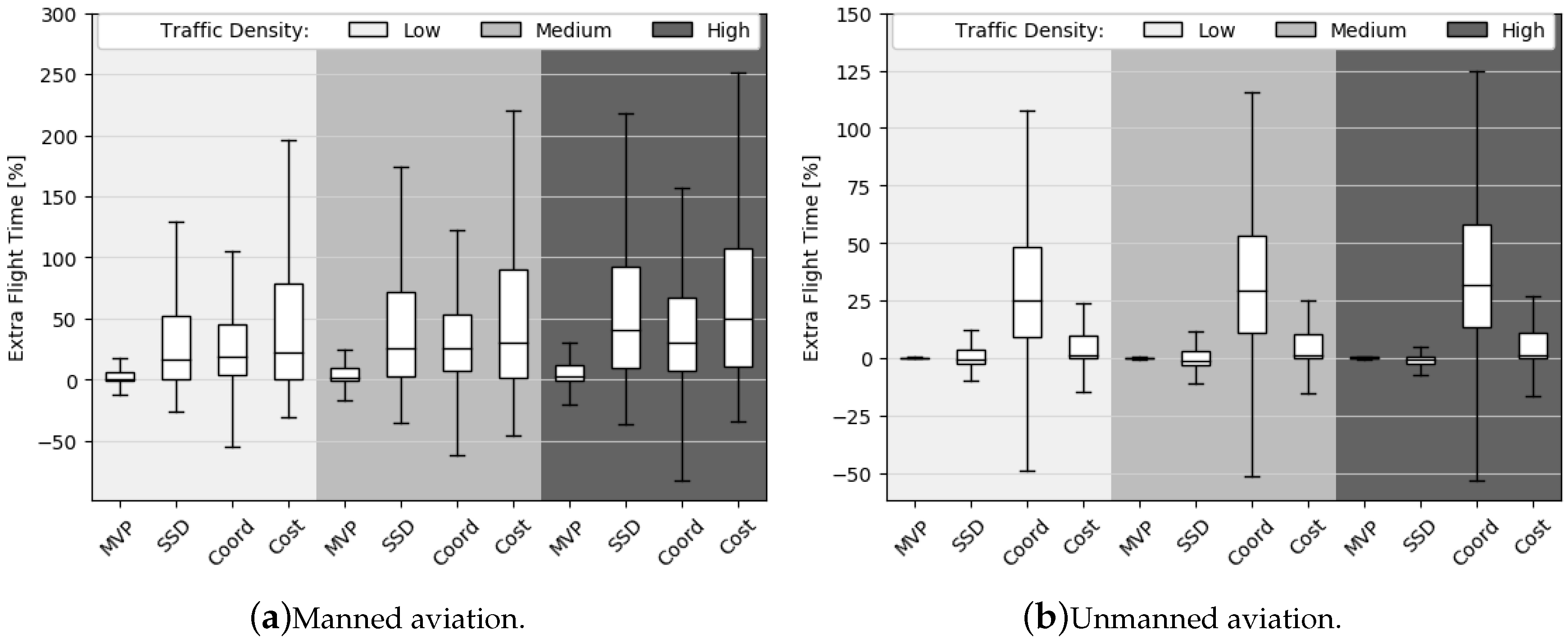
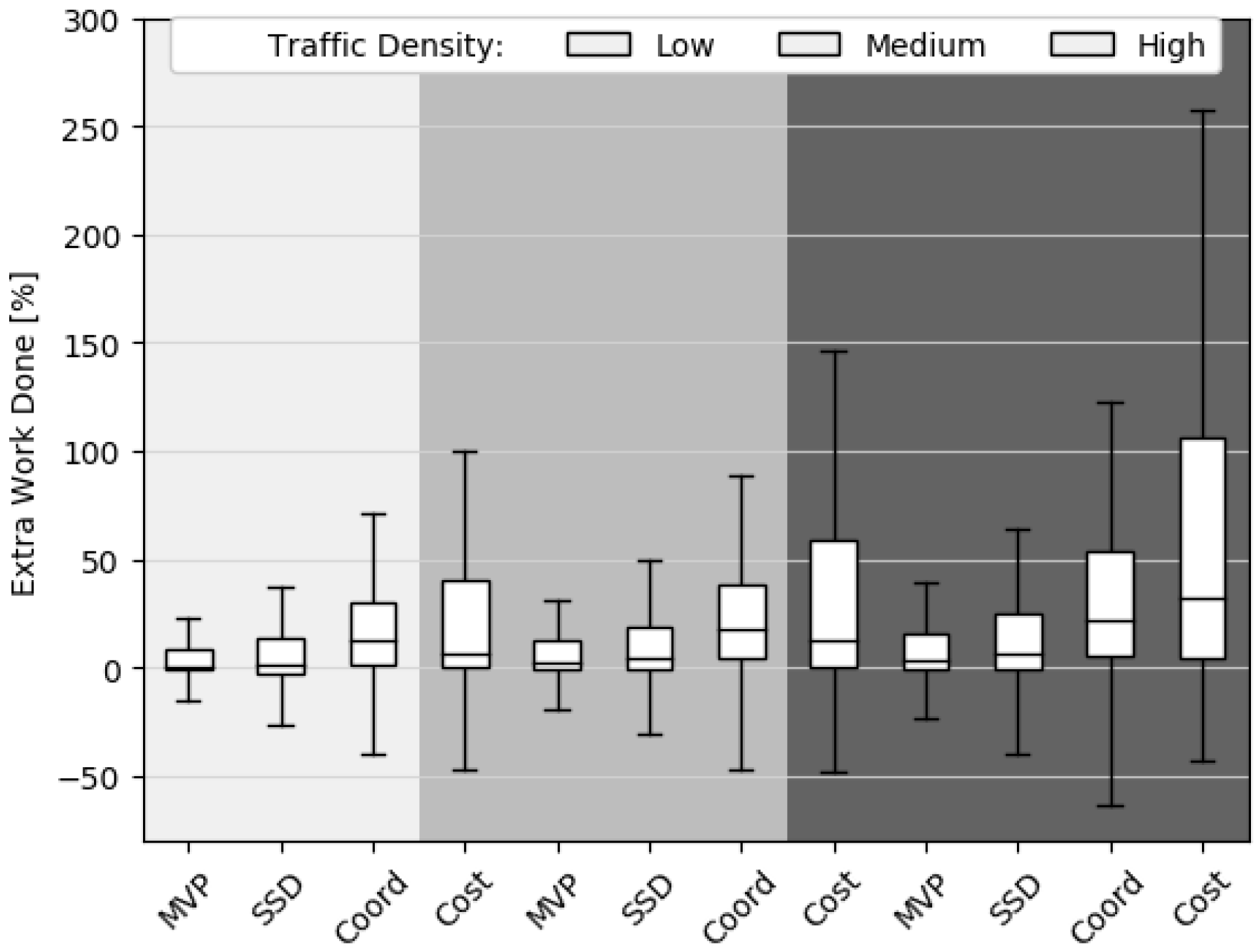
6.3. Efficiency Analysis
7. Discussion
7.1. Evaluation of Current Methods
7.2. Comparison of Conflict Resolution Methods
7.3. Open and Common Simulation Platforms
7.4. Impact of Implementation Characteristics
7.5. Impact of Simulation Properties
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Duong, V.N. FREER: Free-Route Experimental Encounter Resolution—Initial Results; Technical Report; EUROCONTROL Experimental Centre BP 15: Bretigny-sur-Orge, France, 1997. [Google Scholar]
- Wilson, I. PHARE Advanced Tools Project Final Report; Technical Report; DOC 98-70-18; Eurocontrol: 96 rue de la Fusée, Brussels, Belgium, 1999. [Google Scholar]
- Barff, A. Summary of the Results of the Mediterranean Free Flight (MFF) Programme. Air Traffic Control Q. 2007, 15, 119–126. [Google Scholar] [CrossRef]
- Ballin, M.G.; Hoekstra, J.M.; Wing, D.J.; Lohr, G.W. Nasa langley and NLR research of distributed Air/Ground Traffic Management. In Proceedings of the AIAA’s Aircraft Technology, Integration, and Operations (ATIO) 2002 Technical Forum, Los Angeles, CA, USA, 1–3 October 2002. [Google Scholar] [CrossRef]
- Joint Planning and Development Office, Next Generation Air Transportation System (NextGen). Concept of Operations for the Next Generation Air Transportation System; Next Generation Air Transportation System Joint Planning & Development Office: Washington, DC, USA, 2011. [Google Scholar]
- SESAR JOINT UNDERTAKE. European ATM Master Plan; SESAR: Brussels, Belgium, 2020. [Google Scholar]
- Kuchar, J.; Yang, L. A review of conflict detection and resolution modeling methods. IEEE Trans. Intell. Transp. Syst. 2000, 1, 179–189. [Google Scholar] [CrossRef]
- FAA. FAA Modernization and Reform Act of 2012, Conference Report; Technical Report; FAA: Washington, DC, USA, 2012.
- International Civil Aviation Organization. ICAO Circular 328—Unmanned Aircraft Systems (UAS); Technical Report; ICAO: Montreal, QC, Canada, 2011. [Google Scholar]
- Jenie, Y.I.; van Kampen, E.J.; Ellerbroek, J.; Hoekstra, J.M. Taxonomy of Conflict Detection and Resolution Approaches for Unmanned Aerial Vehicle in an Integrated Airspace. IEEE Trans. Intell. Transp. Syst. 2017, 18, 558–567. [Google Scholar] [CrossRef]
- Hoekstra, J.; Ellerbroek, J. BlueSky ATC Simulator Project: An Open Data and Open Source Approach. In Proceedings of the Conference: International Conference for Research on Air Transportation, Philadelphia, PA, USA, 20–24 June 2016. [Google Scholar]
- Yang, L.C.; Kuchar, J.K. Using intent information in probabilistic conflict analysis. In 1998 Guidance, Navigation, and Control Conference and Exhibit; American Institute of Aeronautics and Astronautics Inc., AIAA: Boston, MA, USA, 1998; pp. 797–806. [Google Scholar] [CrossRef]
- Hwang, I.; Seah, C.E. Intent-Based Probabilistic Conflict Detection for the Next Generation Air Transportation System. Proc. IEEE 2008, 96, 2040–2059. [Google Scholar] [CrossRef]
- Porretta, M.; Schuster, W.; Majumdar, A.; Ochieng, W. Strategic conflict detection and resolution using aircraft intent information. J. Navig. 2010, 63, 61–88. [Google Scholar] [CrossRef]
- Liu, W.; Hwang, I. Probabilistic trajectory prediction and conflict detection for air traffic control. J. Guid. Control. Dyn. 2011, 34, 1779–1789. [Google Scholar] [CrossRef]
- Ruigrok, R.; Clari, M.V. The impact of aircraft intent information and traffic separation assurance responsibility on en-route airspace capacity. In Proceedings of the Conference: 5th FAA/EUROCONTROL ATM R&D Seminar, Budapest, Hungary, 23–27 June 2003. [Google Scholar]
- Ruigrok, R.; Hoekstra, J. Human factors evaluations of Free Flight Issues solved and issues remaining. Appl. Ergon. 2007, 38, 437–455. [Google Scholar] [CrossRef]
- Bilimoria, K.; Lee, H.; Mao, Z.H.; Feron, E. Comparison of centralized and decentralized conflict resolution strategies for multiple-aircraft problems. In Proceedings of the 18th Applied Aerodynamics Conference, Denver, CO, USA, 14–17 August 2000. [Google Scholar] [CrossRef]
- Doole, M.; Ellerbroek, J.; Hoekstra, J. Drone Delivery: Urban airspace traffic density estimation. In Proceedings of the Eighth SESAR Innovation Days, Salzburg, Austria, 3–7 December 2018. [Google Scholar]
- Durand, N.; Barnier, N. Does ATM Need Centralized Coordination? Autonomous Conflict Resolution Analysis in a Constrained Speed Environment. In Proceedings of the ATM seminar 2015, 11th USA/EUROPE Air Traffic Management R&D Seminar, Lisbon, Portugal, 23–25 June 2015. [Google Scholar]
- Hoekstra, J.; van Gent, R.; Ruigrok, R. Designing for safety: The `free flight’ air traffic management concept. Reliab. Eng. Syst. Saf. 2002, 75, 215–232. [Google Scholar] [CrossRef]
- Hoekstra, J.M.; Ruigrok, R.C.; Van Gent, R.N. Free Flight in a Crowded Airspace? FAA: Washington, DC, USA, 2000.
- Borrelli, F.; Subramanian, D.; Raghunathan, A.; Biegler, L. MILP and NLP Techniques for centralized trajectory planning of multiple unmanned air vehicles. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; IEEE: Piscataway, NJ, USA, 2006. [Google Scholar] [CrossRef]
- Mart, R.; Reinelt, G. The Linear Ordering Problem: Exact and Heuristic Methods in Combinatorial Optimization, 1st ed.; Springer Publishing Company: New York, NY, USA, 2011. [Google Scholar]
- Alonso-Ayuso, A.; Escudero, L.F.; Martin-Campo, F.J.; Mladenovic, N. A VNS metaheuristic for solving the aircraft conflict detection and resolution problem by performing turn changes. J. Glob. Optim. 2014, 63, 583–596. [Google Scholar] [CrossRef]
- Liu, H.; Liu, F.; Zhang, X.; Guan, X.; Chen, J.; Savinaud, P. Aircraft conflict resolution method based on hybrid ant colony optimization and artificial potential field. Sci. China Inf. Sci. 2018, 61. [Google Scholar] [CrossRef]
- Sathyan, A.; Ernest, N.; Lavigne, L.; Cazaurang, F.; Kumar, M.; Cohen, K. A Genetic Fuzzy Logic Based Approach to Solving the Aircraft Conflict Resolution Problem. In AIAA Information Systems-AIAA Infotech @ Aerospace; American Institute of Aeronautics and Astronautics: Grapevine, TX, USA, 2017. [Google Scholar] [CrossRef]
- Rathbun, D.; Kragelund, S.; Pongpunwattana, A.; Capozzi, B. An evolution based path planning algorithm for autonomous motion of a UAV through uncertain environments. In Proceedings of the 21st Digital Avionics Systems Conference, Irvine, CA, USA, 27–31 October 2002; IEEE: Piscataway, NJ, USA, 2002. [Google Scholar] [CrossRef]
- FAA, D.O.T. Right-of-Way Rules: Except Water Operations, 14 CFR, pt. 91.113; FAA: Washington, DC, USA, 2004.
- Balasooriyan, S. Multi-aircraft Conflict Resolution using Velocity Obstacles. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2017. [Google Scholar]
- Dam, S.V.; Mulder, M.; Paassen, R. The Use of Intent Information in an Airborne Self-Separation Assistance Display Design. In AIAA Guidance, Navigation, and Control Conference; American Institute of Aeronautics and Astronautics: Chicago, IL, USA, 2009. [Google Scholar] [CrossRef]
- Balachandran, S.; Munoz, C.; Consiglio, M.C. Implicitly Coordinated Detect and Avoid Capability for Safe Autonomous Operation of Small UAS. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar] [CrossRef]
- Yang, J.; Yin, D.; Niu, Y.; Shen, L. Distributed Cooperative Onboard Planning for the Conflict Resolution of Unmanned Aerial Vehicles. J. Guid. Control. Dyn. 2019, 42, 272–283. [Google Scholar] [CrossRef]
- International Civil Aviation Organization. Annex 2 to the Convention on International Civil Aviation, Rules of the Air, 10th ed.; International Civil Aviation Organization: Montreal, QC, Canada, 2005. [Google Scholar]
- Klaus, R.A.; McLain, T.W. A Radar-Based, Tree-Branching Sense and Avoid System for Small Unmanned Aircraft. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013. [Google Scholar] [CrossRef]
- Teo, R.; Jang, J.S.; Tomlin, C. Automated multiple UAV flight—the Stanford DragonFly UAV Program. In Proceedings of the 2004 43rd IEEE Conference on Decision and Control (CDC) (IEEE Cat. No.04CH37601), Nassau, Bahamas, 14–17 December 2004; IEEE: Piscataway, NJ, USA, 2004. [Google Scholar] [CrossRef]
- Mao, Z.H.; Dugail, D.; Feron, E. Space Partition for Conflict Resolution of Intersecting Flows of Mobile Agents. IEEE Trans. Intell. Transp. Syst. 2007, 8, 512–527. [Google Scholar] [CrossRef]
- Treleaven, K.; Mao, Z.H. Conflict Resolution and Traffic Complexity of Multiple Intersecting Flows of Aircraft. IEEE Trans. Intell. Transp. Syst. 2008, 9, 633–643. [Google Scholar] [CrossRef]
- Christodoulou, M.; Kodaxakis, S. Automatic Commercial Aircraft-Collision Avoidance in Free Flight: The Three-Dimensional Problem. IEEE Trans. Intell. Transp. Syst. 2006, 7, 242–249. [Google Scholar] [CrossRef]
- Lupu, M.F.; Feron, E.; Mao, Z.H. Influence of Aircraft Maneuver Preference Variability on Airspace Usage. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1446–1461. [Google Scholar] [CrossRef]
- Hu, J.; Prandini, M.; Sastry, S. Optimal Coordinated Maneuvers for Three-Dimensional Aircraft Conflict Resolution. J. Guid. Control. Dyn. 2002, 25, 888–900. [Google Scholar] [CrossRef]
- Pallottino, L.; Feron, E.; Bicchi, A. Conflict resolution problems for air traffic management systems solved with mixed integer programming. IEEE Trans. Intell. Transp. Syst. 2002, 3, 3–11. [Google Scholar] [CrossRef]
- Archambault, N.; Durand, N. Scheduling heuristics for on-board sequential air conflict solving. In Proceedings of the 23rd Digital Avionics Systems Conference (IEEE Cat. No.04CH37576), Salt Lake City, UT, USA, 28–28 October 2004; Volume 1, pp. 481–483. [Google Scholar]
- Lin, C.; Nagarajan, V.; Gupta, R.; Rajaram, B. Efficient sequential consistency via conflict ordering. ACM SIGPLAN Notices 2012, 47, 273–286. [Google Scholar] [CrossRef]
- Karatzas, I.; Shreve, S.E.; Motion, B. Brownian Motion and Stochastic Calculus; Springer: New York, NY, USA, 1998; pp. 47–127. [Google Scholar] [CrossRef]
- Sunil, E.; Ellerbroek, J.; Hoekstra, J.M. CAMDA: Capacity Assessment Method for Decentralized Air Traffic Control. In Proceedings of the 2018 International Conference on Air Transportation (ICRAT), Barcelona, Spain, 26–29 June 2018. [Google Scholar]
- International Civil Aviation Organization. Doc 4444: Procedures for Air Navigation. Air Traffic Management, 16th ed.; International Civil Aviation Organization: Montreal, QC, Canada, 2016. [Google Scholar]
- Alejo, D.; Conde, R.; Cobano, J.; Ollero, A. Multi-UAV collision avoidance with separation assurance under uncertainties. In 2009 IEEE International Conference on Mechatronics; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar] [CrossRef]
- Sunil, E.; Ellerbroek, J.; Hoekstra, J.M.; Maas, J. Three-dimensional conflict count models for unstructured and layered airspace designs. Transp. Res. Part C Emerg. Technol. 2018, 95, 295–319. [Google Scholar] [CrossRef]
- Gawinowski, G.; Garcia, J.L.; Guerreau, R.; Weber, R.; Brochard, M. ERASMUS: A new path for 4D trajectory-based enablers to reduce the traffic complexity. In Proceedings of the 2007 IEEE/AIAA 26th Digital Avionics Systems Conference, Dallas, TX, USA, 21–25 October 2007; IEEE: Piscataway, NJ, USA, 2007. [Google Scholar] [CrossRef]
- Chaloulos, G.; Crück, E.; Lygeros, J. A simulation based study of subliminal control for air traffic management. Transp. Res. Part C Emerg. Technol. 2010, 18, 963–974. [Google Scholar] [CrossRef]
- Rey, D.; Rapine, C.; Fondacci, R.; Faouzi, N.E.E. Subliminal Speed Control in Air Traffic Management: Optimization and Simulation. Transp. Sci. 2016, 50, 240–262. [Google Scholar] [CrossRef]
- Mutuel, L.H.; Neri, P.; Paricaud, E. Initial 4D Trajectory Management Concept Evaluation. In Tenth USA/Europe Air Traffic Management Research and Development Seminar (ATM2013); FAA: Washington, DC, USA; Eurocontrol: Brussels, Belgium, 2013. [Google Scholar]
- Lambregts, A.A.; Tadema, J.; Rademaker, R.M.; Theunissen, E. Defining maximum safe maneuvering authority in 3D space required for autonomous integrated conflict resolution. In Proceedings of the 2009 IEEE/AIAA 28th Digital Avionics Systems Conference, Orlando, FL, USA, 23–29 October 2009; pp. 5.C.1-1–5.C.1-17. [Google Scholar]
- Centre, E.E. Base of Aircraft (BADA) Aircraft Performance Modelling Report; Technical Report EEC Technical/Scientific Report No. 2009-009; EUROCONTROL: Brussels, Belgium, 2009. [Google Scholar]
- Dietrich, T.; Krug, S.; Zimmermann, A. An empirical study on generic multicopter energy consumption profiles. In Proceedings of the 2017 Annual IEEE International Systems Conference (SysCon), Montreal, QC, Canada, 24–27 April 2017; pp. 1–6. [Google Scholar]
- Stolaroff, J.K.; Samaras, C.; O’Neill, E.R.; Lubers, A.; Mitchell, A.S.; Ceperley, D. Energy use and life cycle greenhouse gas emissions of drones for commercial package delivery. Nat. Commun. 2018, 9. [Google Scholar] [CrossRef]
- Burgess, D.; Altman, S.; Wood, M.L. TCAS: Maneuvering Aircraft in the Horizontal Plane. Linc. Lab. J. 1994, 7, 295–312. [Google Scholar]
- Kochenderfer, M.; Holland, J.; Chryssanthacopoulos, J. Next-Generation Airborne Collision Avoidance System. Linc. Lab. J. 2012, 19, 242–249. [Google Scholar]
- Vink, A.; Kauppinen, S.; Beers, J.; de Jong, K. Medium term conflict detection in EATCHIP phase III. In Proceedings of the 16th DASC. AIAA/IEEE Digital Avionics Systems Conference. Reflections to the Future, Irvine, CA, USA, 30 October 1997; IEEE: Piscataway, NJ, USA, 1997. [Google Scholar] [CrossRef]
- Cafieri, S.; Omheni, R. Mixed-integer nonlinear programming for aircraft conflict avoidance by sequentially applying velocity and heading angle changes. Eur. J. Oper. Res. 2017, 260, 283–290. [Google Scholar] [CrossRef]
- Vela, A.E.; Solak, S.; Clarke, J.P.B.; Singhose, W.E.; Barnes, E.R.; Johnson, E.L. Near Real-Time Fuel-Optimal En Route Conflict Resolution. IEEE Trans. Intell. Transp. Syst. 2010, 11, 826–837. [Google Scholar] [CrossRef]
- Chen, W.; Chen, J.; Shao, Z.; Biegler, L.T. Three-Dimensional Aircraft Conflict Resolution Based on Smoothing Methods. J. Guid. Control. Dyn. 2016, 39, 1481–1490. [Google Scholar] [CrossRef]
- Ny, J.L.; Pappas, G.J. Geometric programming and mechanism design for air traffic conflict resolution. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar] [CrossRef]
- Niedringhaus, W. Stream Option Manager (SOM): Automated integration of aircraft separation, merging, stream management, and other air traffic control functions. IEEE Trans. Syst. Man Cybern. 1995, 25, 1269–1280. [Google Scholar] [CrossRef]
- Alonso-Ayuso, A.; Escudero, L.F.; Martín-Campo, F.J.; Mladenović, N. On the aircraft conflict resolution problem: A VNS approach in a multiobjective framework. Electron. Notes Discret. Math. 2017, 58, 151–158. [Google Scholar] [CrossRef]
- Durand, N.; Alliot, J.M.; Chansou, O. Optimal Resolution of En Route Conflicts. Air Traffic Control Q. 1995, 3, 139–161. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, J.; Cai, K.Q.; Prandini, M. Multi-aircraft Conflict Detection and Resolution Based on Probabilistic Reach Sets. IEEE Trans. Control Syst. Technol. 2017, 25, 309–316. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, J.; quan Cai, K.; Prandini, M. A stochastic reachability analysis approach to aircraft conflict detection and resolution. In Proceedings of the 2014 IEEE Conference on Control Applications (CCA), Juan Les Antibes, France, 8–10 October 2014. [Google Scholar] [CrossRef]
- Allignol, C.; Barnier, N.; Durand, N.; Alliot, J.M. A New Framework for Solving En Route Conflicts. Air Traffic Control Q. 2013, 21, 233–253. [Google Scholar] [CrossRef][Green Version]
- Tomlin, C.; Mitchell, I.; Ghosh, R. Safety verification of conflict resolution manoeuvres. IEEE Trans. Intell. Transp. Syst. 2001, 2, 110–120. [Google Scholar] [CrossRef]
- Visintini, A.L.; Glover, W.; Lygeros, J.; Maciejowski, J. Monte Carlo Optimization for Conflict Resolution in Air Traffic Control. IEEE Trans. Intell. Transp. Syst. 2006, 7, 470–482. [Google Scholar] [CrossRef]
- Prandini, M.; Lygeros, J.; Nilim, A.; Sastry, S. A probabilistic framework for aircraft conflict detection. In Proceedings of the Guidance, Navigation, and Control Conference and Exhibit, Portland, OR, USA, 9–11 August 1999. [Google Scholar] [CrossRef]
- Hao, S.; Cheng, S.; Zhang, Y. A multi-aircraft conflict detection and resolution method for 4-dimensional trajectory-based operation. Chin. J. Aeronaut. 2018, 31, 1579–1593. [Google Scholar] [CrossRef]
- Chipalkatty, R.; Twu, P.; Rahmani, A.R.; Egerstedt, M. Merging and Spacing of Heterogeneous Aircraft in Support of NextGen. J. Guid. Control. Dyn. 2012, 35, 1637–1646. [Google Scholar] [CrossRef]
- Pritchett, A.R.; Genton, A. Negotiated Decentralized Aircraft Conflict Resolution. IEEE Trans. Intell. Transp. Syst. 2018, 19, 81–91. [Google Scholar] [CrossRef]
- Sislak, D.; Volf, P.; Pechoucek, M. Agent-Based Cooperative Decentralized Airplane-Collision Avoidance. IEEE Trans. Intell. Transp. Syst. 2011, 12, 36–46. [Google Scholar] [CrossRef]
- Harper, K.; Mulgund, S.; Guarino, S.; Mehta, A.; Zacharias, G. Air traffic controller agent model for free flight. In Proceedings of the Guidance, Navigation, and Control Conference and Exhibit, Portland, OR, USA, 9–11 August 1999. [Google Scholar] [CrossRef]
- Hoffman, E.; Bonnans, F.; Blin, K.; Zeghal, K. Conflict resolution in presence of uncertainty—A case study of decision making with dynamic programming. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Montreal, QC, Canada, 6–9 August 2001. [Google Scholar] [CrossRef]
- Bicchi, A.; Pallottino, L. On optimal cooperative conflict resolution for air traffic management systems. IEEE Trans. Intell. Transp. Syst. 2000, 1, 221–231. [Google Scholar] [CrossRef]
- Granger, G.; Durand, N.; Alliot, J.M. Token Allocation Strategy for Free-Flight Conflict Solving. In Proceedings of the Thirteenth Innovative Applications of Artificial Intelligence, Seattle, WA, USA, 7–9 August 2001. [Google Scholar]
- Paielli, R.A. Modeling Maneuver Dynamics in Air Traffic Conflict Resolution. J. Guid. Control. Dyn. 2003, 26, 407–415. [Google Scholar] [CrossRef]
- Velasco, G.A.M.; Borst, C.; Ellerbroek, J.; van Paassen, M.M.; Mulder, M. The Use of Intent Information in Conflict Detection and Resolution Models Based on Dynamic Velocity Obstacles. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2297–2302. [Google Scholar] [CrossRef]
- Huang, S.; Feron, E.; Reed, G.; Mao, Z.H. Compact Configuration of Aircraft Flows at Intersections. IEEE Trans. Intell. Transp. Syst. 2014, 15, 771–783. [Google Scholar] [CrossRef]
- von Viebahn, H.; Schiefele, J. Method for detecting and avoiding flight hazards. In Enhanced and Synthetic Vision 1997; Verly, J.G., Ed.; SPIE: Bellingham, WA, USA, 1997. [Google Scholar] [CrossRef]
- Devasia, S.; Iamratanakul, D.; Chatterji, G.; Meyer, G. Decoupled conflict-resolution procedures for decentralized air traffic control. In Proceedings of the 2009 IEEE International Conference on Control Applications, St. Petersburg, Russia, 8–10 July 2009; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar] [CrossRef]
- Zhao, Y.; Schultz, R.; Zhao, Y.; Schultz, R. Deterministic resolution of two aircraft conflict in free flight. In Proceedings of the Guidance, Navigation, and Control Conference, New Orleans, LA, USA, 11–13 August 1997. [Google Scholar] [CrossRef]
- Mao, Z.H.; Feron, E.; Bilimoria, K. Stability and performance of intersecting aircraft flows under decentralized conflict avoidance rules. IEEE Trans. Intell. Transp. Syst. 2001, 2, 101–109. [Google Scholar] [CrossRef]
- Bilimoria, K.; Sridhar, B.; Chatterji, G. Effects of conflict resolution maneuvers and traffic density on free flight. In Proceedings of the Guidance, Navigation, and Control Conference, San Diego, CA, USA, 29–31 July 1996. [Google Scholar] [CrossRef]
- Krozel, J.; Peters, M. Conflict Detection and Resolution for Free Flight. Air Traffic Control Q. 1997, 5, 181–212. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, J.; Song, T. Study of Multi-aircraft Conflict Resolution and Algorithm Optimization Based on Genetic Algorithm. In Proceedings of the 2014 International Conference on Computer, Communications and Information Technology; Atlantis Press: Paris, France, 2014. [Google Scholar] [CrossRef]
- Peng, L.; Lin, Y. Study on the Model for Horizontal Escape Maneuvers in TCAS. IEEE Trans. Intell. Transp. Syst. 2010, 11, 392–398. [Google Scholar] [CrossRef]
- Menon, P.K.; Sweriduk, G.D.; Sridhar, B. Optimal Strategies for Free-Flight Air Traffic Conflict Resolution. J. Guid. Control. Dyn. 1999, 22, 202–211. [Google Scholar] [CrossRef]
- Burdun, I.; Parfentyev, O. AI knowledge model for self-organizing conflict prevention/resolution in close free-flight air space. In Proceedings of the 1999 IEEE Aerospace Conference (Cat. No.99TH8403), Snowmass at Aspen, CO, USA, 7 March 1999; IEEE: Piscataway, NJ, USA, 1999. [Google Scholar] [CrossRef]
- Patel, R.B.; Goulart, P.J. Trajectory Generation for Aircraft Avoidance Maneuvers Using Online Optimization. J. Guid. Control. Dyn. 2011, 34, 218–230. [Google Scholar] [CrossRef]
- Alonso-Mora, J.; Naegeli, T.; Siegwart, R.; Beardsley, P. Collision avoidance for aerial vehicles in multi-agent scenarios. Auton. Robot. 2015, 39, 101–121. [Google Scholar] [CrossRef]
- Kelly, A.; Stentz, A.; Amidi, O.; Bode, M.; Bradley, D.; Diaz-Calderon, A.; Happold, M.; Herman, H.; Mandelbaum, R.; Pilarski, T.; et al. Toward Reliable Off Road Autonomous Vehicles Operating in Challenging Environments. Int. J. Robot. Res. 2006, 25, 449–483. [Google Scholar] [CrossRef]
- Ong, H.Y.; Kochenderfer, M.J. Markov Decision Process-Based Distributed Conflict Resolution for Drone Air Traffic Management. J. Guid. Control. Dyn. 2017, 40, 69–80. [Google Scholar] [CrossRef]
- Beard, R.; McLain, T.; Goodrich, M.; Anderson, E. Coordinated target assignment and intercept for unmanned air vehicles. IEEE Trans. Robot. Autom. 2002, 18, 911–922. [Google Scholar] [CrossRef]
- Nikolos, I.; Valavanis, K.; Tsourveloudis, N.; Kostaras, A. Evolutionary algorithm based offline/online path planner for uav navigation. IEEE Trans. Syst. Man Cybern. Part B (Cybernetics) 2003, 33, 898–912. [Google Scholar] [CrossRef]
- Ho, F.; Geraldes, R.; Goncalves, A.; Cavazza, M.; Prendinger, H. Improved Conflict Detection and Resolution for Service UAVs in Shared Airspace. IEEE Trans. Veh. Technol. 2019, 68, 1231–1242. [Google Scholar] [CrossRef]
- Liao, T. UAV Collision Avoidance using A* Algorithm. Master’s Thesis, Auburn University, Auburn, AL, USA, 2012. [Google Scholar]
- Richards, A.; How, J. Model predictive control of vehicle maneuvers with guaranteed completion time and robust feasibility. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; IEEE: Piscataway, NJ, USA, 2003. [Google Scholar] [CrossRef]
- Fasano, G.; Accardo, D.; Moccia, A.; Carbone, C.; Ciniglio, U.; Corraro, F.; Luongo, S. Multi-Sensor-Based Fully Autonomous Non-Cooperative Collision Avoidance System for Unmanned Air Vehicles. J. Aerosp. Comput. Inform. Commun. 2008, 5, 338–360. [Google Scholar] [CrossRef]
- Langelaan, J.W. State Estimation for Autonomous Flight in Cluttered Environments. J. Guid. Control. Dyn. 2007, 30, 1414–1426. [Google Scholar] [CrossRef]
- Obermeyer, K.J.; Oberlin, P.; Darbha, S. Sampling-Based Path Planning for a Visual Reconnaissance Unmanned Air Vehicle. J. Guid. Control. Dyn. 2012, 35, 619–631. [Google Scholar] [CrossRef]
- Park, J.W.; Oh, H.D.; Tahk, M.J. UAV collision avoidance based on geometric approach. In Proceedings of the 2008 SICE Annual Conference, Tokyo, Japan, 20–22 August 2008; IEEE: Piscataway, NJ, USA, 2008. [Google Scholar] [CrossRef]
- bin Duan, H.; yin Zhang, X.; Wu, J.; jun Ma, G. Max-Min Adaptive Ant Colony Optimization Approach to Multi-UAVs Coordinated Trajectory Replanning in Dynamic and Uncertain Environments. J. Bionic Eng. 2009, 6, 161–173. [Google Scholar] [CrossRef]
- Manathara, J.G.; Ghose, D. Rendezvous of multiple UAVs with collision avoidance using consensus. J. Aerosp. Eng. 2012, 25, 480–489. [Google Scholar] [CrossRef]
- Prévost, C.G.; Desbiens, A.; Gagnon, E.; Hodouin, D. Unmanned Aerial Vehicle Optimal Cooperative Obstacle Avoidance in a Stochastic Dynamic Environment. J. Guid. Control. Dyn. 2011, 34, 29–43. [Google Scholar] [CrossRef]
- Zeitlin, A.; McLaughlin, M. Safety of cooperative collision avoidance for unmanned aircraft. IEEE Aerosp. Electron. Syst. Mag. 2007, 22, 9–13. [Google Scholar] [CrossRef]
- Yang, J.; Yin, D.; Niu, Y.; Zhu, L. Cooperative conflict detection and resolution of civil unmanned aerial vehicles in metropolis. Adv. Mech. Eng. 2016, 8. [Google Scholar] [CrossRef]
- Mujumdar, A.; Padhi, R. Reactive Collision Avoidance of Using Nonlinear Geometric and Differential Geometric Guidance. J. Guid. Control. Dyn. 2011, 34, 303–311. [Google Scholar] [CrossRef]
- Jenie, Y.I.; van Kampen, E.J.; de Visser, C.C.; Ellerbroek, J.; Hoekstra, J.M. Selective Velocity Obstacle Method for Deconflicting Maneuvers Applied to Unmanned Aerial Vehicles. J. Guid. Control. Dyn. 2015, 38, 1140–1146. [Google Scholar] [CrossRef]
- Leonard, J.; Savvaris, A.; Tsourdos, A. Distributed reactive collision avoidance for a swarm of quadrotors. Proc. Inst. Mech. Eng. Part G: J. Aerosp. Eng. 2016, 231, 1035–1055. [Google Scholar] [CrossRef]
- Yang, H.; Zhao, Y. Trajectory Planning for Autonomous Aerospace Vehicles amid Known Obstacles and Conflicts. J. Guid. Control Dyn. 2004, 27, 997–1008. [Google Scholar] [CrossRef]
- Zhu, C.; Liang, X.; He, L.; Xu, G.; Li, Y. Conflict Resolution of Aircraft Swarms Based on Interactive Multi-model. In Proceedings of the 2017 International Conference on Artificial Intelligence, Automation and Control Technologies—AIACT ’17, Wuhan, China, 7–9 April 2017; ACM Press: New York, NY, USA, 2017. [Google Scholar] [CrossRef]
- Hwang, I.; Kim, J.; Tomlin, C. Protocol-Based Conflict Resolution for Air Traffic Control. Air Traffic Control Q. 2007, 15, 1–34. [Google Scholar] [CrossRef]
- Jilkov, V. An Efficient Algorithm for Aircraft Conflict Detection and Resolution Using List Viterbi Algorithm. In Proceedings of the 18th International Conference on Information Fusion, Washington, DC, USA, 6–9 July 2015; pp. 1709–1716. [Google Scholar]
- Hurley, R.; Lind, R.; Kehoe, J. A Torus Based Three Dimensional Motion Planning Model for Very Maneuverable Micro Air Vehicles. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Minneapolis, MN, USA, 13–16 August 2012. [Google Scholar] [CrossRef]
- Kitamura, Y.; Tanaka, T.; Kishino, F.; Yachida, M. 3-D path planning in a dynamic environment using an octree and an artificial potential field. In Proceedings of the 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems, Human Robot Interaction and Cooperative Robots, Pittsburgh, PA, USA, 5–9 August 1995; IEEE Comput. Soc. Press: Piscataway, NJ, USA, 1995. [Google Scholar] [CrossRef]
- Hrabar, S. Reactive obstacle avoidance for Rotorcraft UAVs. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar] [CrossRef]
- Jung, D.; Tsiotras, P. On-Line Path Generation for Unmanned Aerial Vehicles Using B-Spline Path Templates. J. Guid. Control. Dyn. 2013, 36, 1642–1653. [Google Scholar] [CrossRef]
- Schmitt, L.; Fichter, W. Collision-Avoidance Framework for Small Fixed-Wing Unmanned Aerial Vehicles. J. Guid. Control. Dyn. 2014, 37, 1323–1329. [Google Scholar] [CrossRef]
- Chowdhary, G.; Sobers, D.M.; Pravitra, C.; Christmann, C.; Wu, A.; Hashimoto, H.; Ong, C.; Kalghatgi, R.; Johnson, E.N. Self-Contained Autonomous Indoor Flight with Ranging Sensor Navigation. J. Guid. Control. Dyn. 2012, 35, 1843–1854. [Google Scholar] [CrossRef]
- Beyeler, A.; Zufferey, J.C.; Floreano, D. Vision-based control of near-obstacle flight. Auton. Robot. 2009, 27, 201–219. [Google Scholar] [CrossRef]
- de Croon, G.; Wagter, C.D.; Remes, B.; Ruijsink, R. Sky Segmentation Approach to obstacle avoidance. In Proceedings of the 2011 Aerospace Conference, Big Sky, MT, USA, 5–12 March 2011; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar] [CrossRef]
- de Croon, G.; de Weerdt, E.; de Wagter, C.; Remes, B. The appearance variation cue for obstacle avoidance. In Proceedings of the 2010 IEEE International Conference on Robotics and Biomimetics, Tianjin, China, 14–18 December 2010; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar] [CrossRef]
- Muller, J.; Ruiz, A.V.; Wieser, I. Safe & sound: A robust collision avoidance layer for aerial robots based on acoustic sensors. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium—PLANS 2014, Monterey, CA, USA, 5–8 May 2014; IEEE: Piscataway, NJ, USA, 2014. [Google Scholar] [CrossRef]
- Ellerbroek, J.; Hoekstra, J. MJRibeiroTUDelft. In Bluesky implementation: Underlying the Publication Review of Conflict Resolution Methods for Manned and Unmanned Aviation; 4TU.Centre for Research Data: Delft, The Netherlands, 2020. [Google Scholar] [CrossRef]
- Ribeiro, M.; Ellerbroek, J.; Hoekstra, J. Bluesky data: Underlying the Publication “Review of Conflict Resolution Methods for Manned and Unmanned Aviation”; 4TU.Centre for Research Data: Delft, The Netherlands, 2020. [Google Scholar] [CrossRef]
- Sunil, E.; Ellerbroek, J.; Hoekstra, J.; Vidosavljevic, A.; Arntzen, M.; Bussink, F.; Nieuwenhuisen, D. Analysis of Airspace Structure and Capacity for Decentralized Separation Using Fast-Time Simulations. J. Guid. Control. Dyn. 2017, 40, 38–51. [Google Scholar] [CrossRef]
- Sun, J.; Hoekstra, J.M.; Ellerbroek, J. Open Aircraft Performance Modeling: Based on an Analysis of Aircraft Surveillance Data. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2019. [Google Scholar]
- Yousef, M.; Iqbal, F.; Hussain, M. Drone Forensics: A Detailed Analysis of Emerging DJI Models. In Proceedings of the 2020 11th International Conference on Information and Communication Systems (ICICS), Irbid, Jordan, 7–9 April 2020; pp. 66–71. [Google Scholar]
- Dorafshan, S.; Maguire, M.; Hoffer, N.V.; Coopmans, C. Challenges in bridge inspection using small unmanned aerial systems: Results and lessons learned. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1722–1730. [Google Scholar]
- Świerczynski, S.; Felski, A. Determination of the Position Using Receivers Installed in UAV. In Proceedings of the 2019 European Navigation Conference (ENC), Warsaw, Poland, 9–12 April 2019; pp. 1–4. [Google Scholar]
- EUROCONTROL. Performance Review Report An Assessment of Air Traffic Management in Europe during the Calendar Year 2018; EUROCONTROL: Brussels, Belgium, 2018. [Google Scholar]
- Fiorini, P.; Shiller, Z. Motion Planning in Dynamic Environments Using Velocity Obstacles. Int. J. Robot. Res. 1998, 17, 760–772. [Google Scholar] [CrossRef]
- Chakravarthy, A.; Ghose, D. Obstacle avoidance in a dynamic environment: A collision cone approach. IEEE Trans. Syst. Man, Cybern. Part A Syst. Hum. 1998, 28, 562–574. [Google Scholar] [CrossRef]
- Eby, M. A self-organizational approach for resolving air traffic conflicts. Linc. Lab. J. 1994, 7, 2. [Google Scholar]
- Vatti, B.R. A generic solution to polygon clipping. Commun. ACM 1992, 35, 56–63. [Google Scholar] [CrossRef]
- Bilimoria, K.; Sheth, K.; Lee, H.; Grabbe, S. Performance evaluation of airborne separation assurance for free flight. In 18th Applied Aerodynamics Conference; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2000. [Google Scholar] [CrossRef]
- Piedade, L. Aircraft Conflict Prioritization and Resolution using the Solution Space Diagram. Master’s Thesis, Instituto Superior Tecnico, Lisbon, Portugal, 2018. [Google Scholar]
- Hoekstra, J. Designing for Safety: The Free Flight Air Traffic Management Concept. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2001. [Google Scholar]
- Sunil, E.; Ellerbroek, J.; Hoekstra, J.; Maas, J. Modeling airspace stability and capacity for decentralized separation. In Proceedings of the 12th USA/Europe Air Traffic Management R&D Seminar, Seattle, WA, USA, 26–30 June 2017. [Google Scholar]
- Sunil, E.; Olafure, Þ.; Ellerbroek, J.; Hoekstra, J. Analyzing the Effect of Traffic Scenario Properties on Conflict Count Models. In Proceedings of the Conference: 2018 International Conference for Research on Air Transportation, Barcelona, Spain, 26–29 June 2018. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conflict Detection Categories | ||||
|---|---|---|---|---|
| Surveillance | Trajectory Propagation | Predictability Assumption | ||
| Centralised Dependent |  | State-Based Intent-Based |  | Nominal |
| Distributed Dependent | Probabilistic | |||
| Independent | Worst-Case | |||
| Conflict Resolution Categories | Applicable For All Conflict Resolution Categories | ||||||
|---|---|---|---|---|---|---|---|
| Control | Method Categories | Multi-Actor Conflict Resolution | Avoidance Planning | Avoidance Manoeuvre | Obstacle Types | Optimization | |
Centralised | Exact |  | Sequential | Strategic | Heading | Static | Flight Path |
| Heuristic | Concurrent | Tactical | Speed | Dynamic | Flight Time | ||
Distributed | Prescribed |  | Pairwise Sequential | Escape | Vertical | All | Fuel/Energy Consumption |
| Reactive | Pairwise Summed | Flight Plan | |||||
| Explicitly Negotiated | Joint Solution | ||||||
| Surv | Traj | PAsm | Control | MultiActor | Plan | AvMan | Obst | Examples | |
|---|---|---|---|---|---|---|---|---|---|
| C | S | C | S + T | H + V | A | ATC | |||
| D | S | D | T | D | ADS-B | ||||
| D | S | N | D | PSE | V | D | TCAS | ||
| D | S | N | D | PSE | H/V | D | TCAS II [58] | ||
| D | S | P | D | PSE | V | D | TCAS X [59] | ||
| D | S | N | D | PSE | V | D | GPWS | ||
| C | I | P | - | - | - | - | D | Vink [60] | |
| Exact | C | S | N | C | C | S | H/S | D | Cafieri [61] 1 |
| C | S | N | C | C | T | H/S | D | Pallottino [42] | |
| C | S | N | C | C | S | H + S | D | Vela [62] | |
| C | S | N | C | C | S | H + V | D | Hu [41] | |
| C | S | P | C | C | S | S | D | Rey [52] | |
| C | S | P | C | C | S | FP | D | Chen [63] | |
| C | I | N | C | C | T | FP | D | Le Ny [64] | |
| C | I | N | C | C | S | FP | D | Hu [41] | |
| C | I | P | C | C | S | FP | D | Niedringhaus [65]2 | |
| Heuristic | C | S | N | C | S | T | H | D | Ayuso [25] |
| C | S | N | C | S | T | H | D | Liu [26] | |
| C | S | N | C | S | T | H/S/V | D | Ayuso [66] | |
| C | S | P | C | S | S | H | D | Durand [67] | |
| C | S | P | C | S | T | H | D | Sathyan [27] | |
| C | S | P | C | S | T | H | D | Yang [68,69] | |
| C | S | P | C | S | T | H | D | Allignol [70] | |
| C | S | P | C | S | T | H + S | D | Tomlin [71] | |
| C | I | P | C | S | S | FP | D | Visintini [72] | |
| C | I | P | C | S | S | FP | D | Prandini [73] | |
| C | I | P | C | S | S | FP | D | Hao [74] 1,3 | |
| Explicitly Negotiated | D | S | N | D | PSE | T | H | D | Chipalkatty [75] 2 |
| D | S | N | D | PSE | T | FP | D | Pritchett [76] | |
| D | I | N | D | J | T | FP | D | Sislak [77] 1 | |
| D | I | N | D | PSE | T | H + S | D | Harper [78] | |
| D | I | N | D | PSE | T | H | D | Blin [79] | |
| D | I | P | D | PSE | T | FP | D | Bicchi [80] | |
| D | I | P | D | PSE | T | H | D | Granger [81] | |
| Reactive | D | S | N | D | J | T | H + S | D | Balasooriyan [30] 1 |
| D | S | N | D | PSU | T | H + S + V | D | Hoekstra [21] 1 | |
| D | S | P | D | PSE | T | H/S | D | Paielli [82] | |
| D | I | N | D | J | T | H + S | D | Van Dam [31] 1 | |
| D | I | N | D | J | T | H + S | D | Velasco [83] | |
| Prescribed | D | - | - | D | - | T | H | D | RoW [29], RoTA [34] |
| Other | C | S | N | C | C | T | H | D | Mao [37] |
| C | S | N | C | S | T | H | D | Treleaven [38] | |
| C | S | N | C | S | T | H | D | Huang [84] | |
| C | S | P | D | S | T | H/V | A | Viebahn [85] | |
| D | S | N | D | J | S | H | D | Devasia [86] | |
| D | S | N | D | PSE | T | H | D | Zhao [87] | |
| D | S | N | D | PSE | T | H | D | Mao [88] | |
| D | S | N | D | J | T | S | D | Christodoulou [39] | |
| D | S | N | D | PSE | T | H/S/V | D | Bilimoria [89] | |
| D | S | N | D | PSE | T | H/S/V | D | Krozel [90] | |
| D | S | N | D | PSE | T | H + S | D | Lupu [40] | |
| D | S | P | D | PSE | T | H | D | Zhang [91] | |
| D | S | N | D | PSE | T | H/S | D | Peng [92] | |
| D | I | P | D | PSE | T | - | D | Yang [12] | |
| D | I | N | D | J | T | FP | D | Menon [93] | |
| D | I | N | D | PSE | T | FP | D | Burdun [94] | |
| D | - | N | D | J | T | FP | S | Patel [95] |
| Surv | Traj | PAsm | Control | MultiActor | Plan | AvMan | Obst | Examples | |
|---|---|---|---|---|---|---|---|---|---|
| Exact | C | S | N | C | C | T | H + S | D | Alonso-Mora [96] |
| C | I | N | C | C | S | FP | D | Borrelli [23] | |
| I | - | - | C | C | S | H + V | S | Kelly [97] | |
| Heuristic | C | S | P | C | S | T | H | A | Yi Ong [98] |
| C | I | N | C | S | S | FP | D | Borrelli [23] | |
| C | I | N | C | S | S | FP | D | Alejo [48] | |
| C | I | N | C | S | S | FP | D | Beard [99] | |
| C | - | - | C | - | S | FP | S | Nikolos [100] | |
| C | S | N | C | S | T | H | D | Ho [101] | |
| C | I | N | C | S | T | FP | A | Liao [102] | |
| C | S | N | C | S | T | H + V | A | Richards [103] | |
| C | S | N | C | S | T | FP | D | Fasano [104] | |
| C | S | P | C | S | T | FP | D | Rathbun [28] | |
| C | S | N | C | S | T | H + S | D | Alonso-Mora [96] | |
| I | - | - | C | - | S | FP | S | Langelaan [105] | |
| I | - | - | C | S | S | H | S | Obermeyer [106] | |
| Explicitly Negotiated | D | S | N | D | PSE | T | H | D | Park [107] |
| D | S | N | D | J | T | H | D | Duan [108] | |
| D | S | N | D | PSE | T | V | D | Manathara [109] | |
| D | S | P | D | PSE | T | H | D | Yang [33] | |
| D | S | P | D | J | T | FP | D | Prevost [110] | |
| D | S | N | D | PSE | E | V | D | Zeitlin [111] | |
| Reactive | D | S | P | D | J | T | H | A | Yang [112] |
| D | S | N | D | J | T | H + S | D | Alonso-Mora [96] | |
| D | S | N | D | J | T | H | D | Balachandran [32] | |
| D | S | N | D | PSE | T | S | D | Mujumdar [113] | |
| D | S | N | D | J | T | H + S | D | Alonso-Mora [96] | |
| D | S | N | D | J | T | H + S | D | Jenie [114] | |
| D | S | N | D | PSE | T | H + V | D | Leonard [115] | |
| Prescribed | D | - | - | D | - | T | H | D | RoW [29], RoTA [34] |
| Other | C | - | N | D | J | T | FP | S | Yang [116] |
| D | S | N | D | PSE | T | H | D | Zhu [117] | |
| D | S | N | D | PSE | T | H | D | Hwang [118] | |
| D | S | N | D | PSE | T | H/V | D | Jilkov [119] | |
| D | I | - | - | J | T | FP | S | Hurley [120] | |
| I | S | N | D | J | T | H + V | A | Kitamura [121] | |
| I | - | N | D | J | T | FP | S | Hrabar [122] | |
| I | - | N | D | J | T | H | S | Jung [123] | |
| I | - | - | D | PSE | T | H | S | Schmitt [124] | |
| I | - | - | D | J | T | FP | S | Chowdhary [125] | |
| I | - | - | D | J | T | FP | S | Nikolos [100] | |
| I | S | P | D | PSE | T | H | D | Klaus [35] | |
| I | S | N | D | PSE | E | H + S + V | D | Teo [36] | |
| I | - | - | D | J | E | H + V | S | Beyeler [126] | |
| I | - | - | D | J | E | H + V | S | deCroon [127,128] | |
| I | - | - | D | J | E | H + V | S | Muller [129] |
| Category | Abbreviation | Meaning |
|---|---|---|
| Surveillance (Surv) | C | Centralised Dependent |
| D | Distributed Dependent | |
| I | Independent | |
| Trajectory Propagation (Traj) | S | State-based |
| I | Intent-based | |
| Predictability Assumption (PAsm) | N | Nominal |
| P | Probabilistic | |
| WC | Worst-case | |
| Control | C | Centralised |
| D | Distributed | |
| Multi-Actor Conflict Resolution (MultiActor) | S | Sequential |
| C | Concurrent | |
| PSE | Pairwise Sequential | |
| PSU | Pairwise Summed | |
| J | Joint Solution | |
| Avoidance Planning (Plan) | S | Strategic |
| T | Tactical | |
| E | Escape | |
| Avoidance Manoeuvre (AvMan) | H | Heading |
| S | Speed | |
| V | Vertical | |
| H + V | Horizontal AND vertical simultaneously | |
| H/V | Can choose either horizontal or vertical | |
| FP | Flight-Plan | |
| Obstacle Types (Obst) | S | Static |
| D | Dynamic | |
| A | All |
| Boeing 747-400 | DJI Mavic Pro | |
|---|---|---|
| Speed [kts] | 450–500 | −35–35 |
| Mach [-] | 0.784–0.871 | – |
| Mass [kg] | 285.700 | 0.734 |
| Turn Rate [°/s] | 1.53–1.70 | max: 15 |
| Load Factor in Turns | 1.22 | – |
| Acceleration/Breaking [kts/s] | 1.0 | 1.0 |
| Traffic Density [ac/10,000 NM2] | Instantaneous Aircraft | Spawned Aircraft | ||
|---|---|---|---|---|
| Manned Aviation | Low | 32 | 648 | 3070 |
| Medium | 37 | 768 | 3640 | |
| High | 45 | 911 | 4317 | |
| Unmanned Aviation | Low | 12,000 | 1080 | 4629 |
| Medium | 13,856 | 1247 | 5345 | |
| High | 16,000 | 1440 | 6172 |
| CR Methods | ||||
|---|---|---|---|---|
| Planning | Tactical | |||
| Control | Distributed | Centralised | ||
| Method Category | Reactive | Explicitly Negotiated | Heuristic | |
| Multi-Actor Conflict Resolution | Pairwise Summed | Joint Solution | Coord | Cost |
| MVP | SSD | |||
| Manned Aviation | Unmanned Aviation | |
|---|---|---|
| Scenario Duration [h] | 3 | |
| Number of Repetitions [-] | 3 | |
| Min Flight Time [h] | 0.5 | |
| Experiment Duration [h] | 1 h 30 m (45 m–2 h 15 m) | |
| Measurement Area [NM2] | 202,500 | 900 |
| Experiment Area [NM2] | 405,000 | 1800 |
| Min Flight Distance [NM] | 200 | 15 |
| Max Flight Distance [NM] | 250 | 20 |
| Radius PZ Horizontal [NM] | 5 | 0.027 |
| Radius PZ Vertical [ft] | 1000 | 65 |
| Min TAS [kts] | 450 | 5 |
| Average TAS [kts] | 470 | 30 |
| Max TAS [kts] | 500 | 35 |
| Average Time Flight [min] | 40 | 40 |
| Flight Level [ft] | 36,000 | 300 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ribeiro, M.; Ellerbroek, J.; Hoekstra, J. Review of Conflict Resolution Methods for Manned and Unmanned Aviation. Aerospace 2020, 7, 79. https://doi.org/10.3390/aerospace7060079
Ribeiro M, Ellerbroek J, Hoekstra J. Review of Conflict Resolution Methods for Manned and Unmanned Aviation. Aerospace. 2020; 7(6):79. https://doi.org/10.3390/aerospace7060079
Chicago/Turabian StyleRibeiro, Marta, Joost Ellerbroek, and Jacco Hoekstra. 2020. "Review of Conflict Resolution Methods for Manned and Unmanned Aviation" Aerospace 7, no. 6: 79. https://doi.org/10.3390/aerospace7060079
APA StyleRibeiro, M., Ellerbroek, J., & Hoekstra, J. (2020). Review of Conflict Resolution Methods for Manned and Unmanned Aviation. Aerospace, 7(6), 79. https://doi.org/10.3390/aerospace7060079