1. Introduction
The CNS/ATM project by the International Civil Aviation Organization (ICAO) increased air traffic management (ATM) performance in the National Airspace System (NAS) by using the satellite technologies of global positioning system (GPS) and satellite communication (SATCOM) for seamless operation [
1]. Under this system infrastructure and environment, the automatic dependent surveillance (ADS) was developed to enforce aircraft surveillance by broadcasting its position data to aircraft and ground ATC centers in its vicinity. ADS-B affiliates airborne aircraft for clear traffic awareness.
For UAV development, the unmanned aircraft system traffic management (UTM) proposed by the National Air and Space Administration (NASA) constructs a feasible and effective system to assist UAV operation for aviation safety [
2]. The UTM system is applied to small UAVs in low altitudes and to large mission UAVs into the integrated airspace. From the ATC prospective, UAVs going into integrated airspace becomes a great concern to NAS flight safety [
3]. Using the same concept from ATM, a hierarchical UTM system is proposed for construction in Taiwan for civil UAVs [
4].
ADS-B has been proven to be effective and efficient in aviation surveillance. It is very important both in ATM as well as in UTM. Since the traffic alert and collision avoidance system (TCAS) have become a mature standard, the active detect and avoid (DAA) mechanism enables collision avoidance from UAVs and manned aircraft to enhance aviation safety [
5]. Referring to the ADS-B system concept, an ADS-B like surveillance system is proposed with four feasible systems [
6]. TCAS for ATM or DAA for UTM may be executed by software to estimate the closest point of approach (CPA) between two approaching aircraft and generate warning signals for avoidance [
7]. The ADS-B TCAS concept used in the air transportation system can be extended into ADS-B like DAA in the UAVs.
In the developing UTM, communication downlink from air to ground is a key solution for UAV surveillance. UAV communication can use plenty of frequency resources in military systems, but it is limited in civil systems. UAVs may be classified by their weight and thrust into small or large scale UAVs with rotor wings and fixed wings. Command and control (C2) [
8] is the main function for operating visual line-of-sight (VLOS) or beyond visual line of sight (BVLOS) flight. Small UAVs (sUAVs) will be legal to fly below 400 feet in urban to remote areas for a variety of applications. UAVs can be included into UTM to be transparent to ATM. For those high performance long endurance fixed wing UAVs, their operation will definitely threaten NAS flights. UTM will need to merge into the integrated airspace in high altitude with ATM [
2,
9]. The UTM shall link to ATM via ADS-R [
10,
11].
The ADS-B like communication infrastructure is proposed by introducing 4G/LTE (long term evolution), LoRa (long range wide area network) and APRS (automatic packet reporting system) for small UAVs [
6]. In UTM development [
2], the airspace of 400 feet altitude is regularly controlled for small UAVs at lower speeds. In Taiwan, UAVs flying below 400 feet is authorized for local government for management, while those above 400 feet is controlled and monitored by Civil Aeronautical Administration (CAA) [
4,
9]. A hierarchical UTM is constructed under such segmentation to establish regional UTM (RUTM) and national UTM (NUTM) for prompt management [
4].
The proposed hierarchical UTM tries to construct a prototype for the demonstration of the UAV surveillance and collision avoidance system based on the constructed ADS-B like communication infrastructure [
6]. Orrell et al. presented an ADS-B like system concept using 4G/LTE for the small UAV (sUAV) surveillance in low altitude [
12]. Unlike manned aircraft, since sUAV are not detectable via radar or other independent surveillance techniques, the dependent surveillance mechanism shall be feasible to develop. Mobile communication is the most affordable communication system to adopt for its opening to the public in most areas. 4G/LTE is available to use with UAVs. However, 4G/LTE cannot be guaranteed for those flying above 400 feet. Based on the ADS-B like system concept, the construction of a UAV surveillance infrastructure using multiple communication media is proposed [
4,
6]. In addition to 4G/LTE, LoRa, APRS, and XBee are eligible candidates for ADS-B like for UAV [
6]. The ADS-B like candidates have different characteristics compared in
Table 1.
Ramsey introduced a small ADS-B device by “uavionix” [
13] for UAVs. It uses commercial frequency 1090 MHz and 978 MHz on UAVs. However, radio stations for UAV ADS-B are not designed to provide coverage down to low altitudes [
12]. The UAV service providers are not affordable for the construction of a new infrastructure. Scardina presented the use of ADS-B for the general categories of commercial air transportation systems [
14] by FAA and ICAO. Under very limited ADS-B authorizations, it is difficult to broadly open to all types of UAVs, especially those small ones flying below 400 feet.
In this paper, the APRS as an ADS-B like candidate for UTM is well developed. The APRS on-board unit (OBU) is designed and built with an aim towards low-cost, light-weight, high-reliability, and wide-coverage through ground transceiver station (GTS) deployment. APRS GTS is deployed to establish communication gateways to relay radio surveillance data from UAVs onto the UTM cloud. In the preliminary surveys, the APRS GTS covers a 40 km radius range or longer. The OBU design and GTS deployment for APRS, by system integration with proper firmware programming, is the core technology to downlink the message to UTM surveillance.
APRS OBU fabrication, firmware programming, and system integration are discussed in detail in this paper. UAV flight tests from different test sites are demonstrated to show the effect of APRS OBU performance on UTM [
15]. APRS OBU will be an important redundant system for the complete ADS-B Like solution in UTM.
2. Materials and Methods
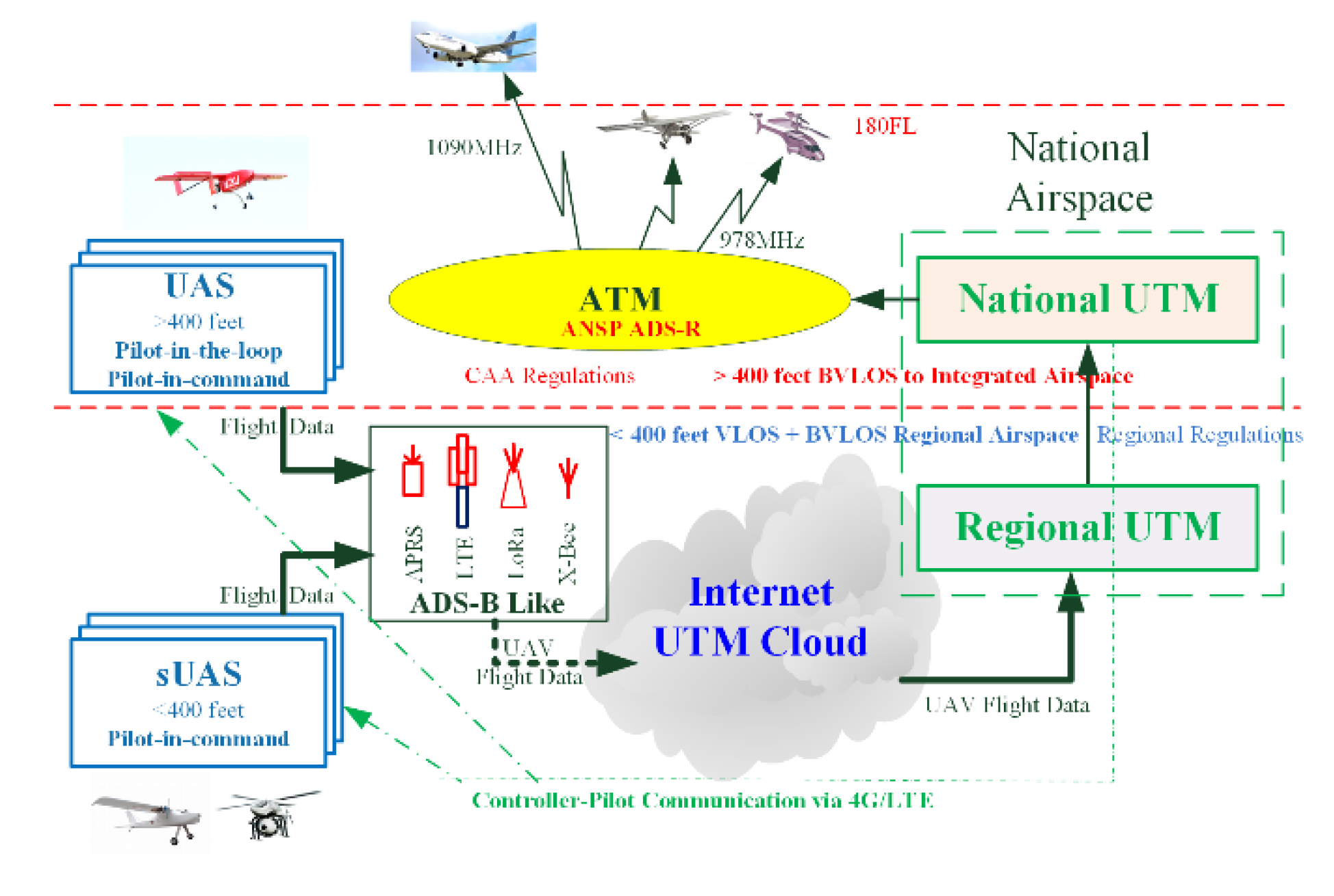
The proposed hierarchical UTM [
4] requires a surveillance system infrastructure including ground infrastructure and OBU for UAVs. The regional UTM (RUTM) and national UTM (NUTM) shown in
Figure 1 are proposed for UAV surveillance management under local government and CAA in Taiwan [
9]. The APRS has the widest coverage range of the proposed ADS-B like solutions for UTM.
The APRS is commonly used by HAMs and volunteer rescue groups. In most Asian countries, a specific frequency of 144.64 MHz is assigned for public use. The transceiver station for APRS is called i-Gate. The APRS i-Gates relay messages via the Internet to any destination. There are more than 200 i-Gates distributed over Taiwan. It is very convenient to use APRS as an ADS-B Like solution for UAVs. Since an APRS at 144.64 MHz is noisy from many irregular users, to avoid communication traffic jamming, the UTM project has applied a public specific frequency of 144.61 MHz for UAV OBUs. The reason for selecting 144.61 MHz is to avoid frequent conflict from other users. From our preliminary tests [
6], each i-Gate uses the 6 dBi antenna can cover a 40 km radius range operation for an APRS with 0.5 W radio power. It is particularly useful for high altitude fixed wing UAVs flying into remote and mountain territories.
In the hierarchical UTM development, the APRS OBU is designed and fabricated using a ‘LightAPRS’ module [
16] to integrate with Pixhawk flight controller (FC) [
17] for UAVs. The ground transceiver station (GTS) is designed with an off-the-shelf KENWOOD TM721G radio frequency receiver, “TNC-pi” [
18] (terminal node controller) and Raspberry pi to relay messages onto the Internet to the UTM Cloud database.
Figure 2 shows the proposed ADS-B Like system structure using APRS. The TNC-pi demodulates audio signal into digital signal, and then passes it to Raspberry Pi (RPi), a single board computer with Linux OS, for further processing and storing onto the UTM Cloud. The UTM cloud is constructed with a database to manipulate all UAV surveillance data to regional UTM (RUTM) operation centers [
4].
2.1. APRS On-Board Unit (OBU)
The APRS OBU is fabricated with a LightAPRS module with a specific firmware design shown in
Figure 3. The firmware starts the process of assigning the UAV ID, pilot ID, audio frequency, call-sign SSID, and symbol code. The ADS-B Like surveillance data format is specified including: [Heading(5); UAV_ID(6); Pilot_ID(6); Lat.(9); Long.(10); Alt.(4); 6 DoF(Vx, Vy, Vz, α, β, γ) (36); V(6); A(6); Tail(2)]. The Heading and Tail in surveillance data are for distinguishing the transmitter from the other HAM users. The ADS-B Like surveillance data not only contains position tracking but also includes 6 DoF flight control data at 90 Bytes. The data format is designed with the purpose of collecting UAV flight performance into Big Data for further study and analysis [
4,
6]. The original data ending with the UAV operation current is collected and arranged in AX.25 format [
19]. Then, the digital data is modulated into audio frequency using frequency shift keying (AFSK) for transmission by the built-in RF module in LightAPRS at 144.61 MHz, which is distinguished from HAM users at 144.64 MHz.
The data format of the ADS-B Like solution for UTM surveillance is shown in
Table 2. For APRS OBUs, the flight control data (V
x, V
y, V
z, α, β, γ, voltage, current) are from the Pixhawk FC, and the position data (latitude, longitude, and altitude) are from a built-in GPS module in LightAPRS. Note that the three-axis flight speed V
x, V
y, and V
z are based on the inertial north-east-down (NED) frame. The UART port is used for the connection between LightAPRS and Pixhawk FC, and the MAVLink protocol [
20] is used to communicate with the Ardupilot flight control software in the Pixhawk for requesting flight data and setting the time interval.
2.2. Ground Transceiver Station
The core of the APRS ground transceiver station (GTS), also known as i-Gate, is built by the RPi single board computer. It is programmed by using Python to control data processing, and then relays data to UTM Cloud via Internet. The flowchart of programs in RPi is shown in
Figure 4.
The APRS transmits data in audio message. Thus, the TCN-Pi recovers audio messages from the RF receiver back into digital data first, and then transmits digital data to RPi through the serial port as
The packet format using a KISS protocol, a simple Host-to-TNC communication protocol, starts with the hexadecimal number 0xC0 and ends with 0xC0. As the RPi receives data from TNC-Pi, it proceeds to filter out the data of interest from the specific symbol code until the last 0xC0. In the APRS OBU, this symbol code is designed as “[“ in the middle of the second line. The acquired data is ordered into a data string for post-processing as
![Aerospace 07 00100 i002]()
This data string will be the typical ADS-B Like 90 Byte data for UTM surveillance. The data “058” and “12.03” indicate the transmitting sequence and LightAPRS voltage. Transmitting sequence just marks the data being sent. LightAPRS voltage notifies the user of OBU status. Then, it reads the 90 Byte surveillance data from heading “@@@**” to tailing “##” for UTM. The final step will pass the received data using the POST method in HTTP protocol into the UTM database. The assigned format for POST method is as follows, and D1 to D6 represents the 6-DoF flight data.
3. Results
Test case 1:
This test aims to verify the reliability of collecting 90 byte surveillance data near the GTS site. The flight plan is to let the aircraft fly in four different directions to test the reliability of collecting data. With APRS OBU at 0.5 W RF power, the flight test uses the DJI M600 hexa-rotor UAV, as shown in
Figure 5, to fly from CJCU campus to a nearby area. Since the flight control data cannot be acquired from the flight controller, the APRS OBU transmits the position data and the hard-code flight control data to UTM cloud in this test. The APRS OBU is mounted on the top of the UAV. In addition, LoRa OBU, another ADS-B like system, is also included for the test. The antenna of APRS GTS is fixed on the rooftop of a building on the CJCU campus as shown in
Figure 6. From the UTM controller center, whenever the UAV takes off to fly, its position will be shown clearly on the UTM surveillance display as shown in
Figure 7.
Figure 8 shows the flight test around CJCU campus with a flight track record of about 4.7 km at 55 m (AGL) altitude at 3–4 m/sec cruise speed. The maximum distance between the UAV and APRS GTS is about 1.4 km. The APRS OBU reports 90 byte of surveillance data about every 10 s. In this test, all of the received surveillance data in GTS have a complete 90 bytes. The test result shows that the APRS ADS-B like system works well under different UAV flight directions.
To test the APRS ADS-B like coverage, a series of flight test are conducted from the near site about 4 km to the remote site about 40 km away from CJCU GTS. The DIY 550 quad-rotor UAV—equipped with GPS, Pixhawk FC, APRS OBU, and 433 MHz telemetry—is adopted for these tests. The usage of 433 MHz telemetry is for uploading the flight mission to Pixhawk. The right hand side in
Figure 9 shows the 550 quad-rotor UAV, assembled by: 550 mm carbon airframe, 4108-390 kV motor, 30A ESC, 1555 propeller, and 6S 25C 5800mah LiPo battery. The purpose for these tests was to examine: (1) the effective range of all communication devices; (2) complete 90 byte surveillance data; (3) data stability and continuity; (4) UAV attitude by 6 DoF.
Test case 2:
In this test, the test site was located 37.63 km away from CJCU GTS with an altitude of 90 m above MSL. The UAV flew at an altitude of 184 m above MSL and circling a 800 m radius. In
Figure 9, the UAV icon is displayed on the UTM surveillance system in the left hand side leaving six points behind as its past track.
2020-02-21 18:14:53 028 4.83
@@@**U00005O0000523.23106N120.36976E0184
1.28 −0.71 0.05 −4.2 −50.5 2.6 24.37 8.53##
The data begins with date, time, data sequence number 028, and 4.83 for OBU voltage. The data starts from heading “@@@**”, UAV ID “U00005”, Pilot ID “O00005”, surveillance data, and tailing by “##” to clearly distinguish from other APRS users. The real flight data is shown in
Table 3. The UAV ID and Pilot ID are connecting to the management information system (MIS) from CAA [
9].
Figure 10,
Figure 11,
Figure 12 and
Figure 13 show the surveillance data in statistics in accordance with the data sequence number.
Figure 10 shows the actual data receiving intervals. The varying intervals are due to a delay in fetching data from Pixhawk FC. The delay time according to radio traffic and congestion is minor in the tests. The interval is measured by the difference of receiving time for successive surveillance data in APRS GTS. The maximum fluctuation is about 4 s, and is in the acceptable range for UTM operation.
Figure 11 shows the UAV altitude tracking above MSL.
Figure 12 shows the power supply status along the flight. It is quite useful to give an early warning to pilots if battery power supply is not sufficient at this point.
Figure 13 shows the tracking of 6-DoF UAV during the flight. The UTM controller can check the UAV’s status including position and 6-DoF flight data by using the 90 byte surveillance data from APRS OBU. From the yaw in
Figure 13, it is obvious that the UAV have a right turn in flight according to data no. 36 and 37. Moreover, the flight altitude is held in flight since the value of Vz was kept around 0.
Test case 3:
This test was conducted at the test site 4.4 km away from CJCU GTS. The UAV flew at an altitude of 184 m above MSL in a square flight path.
Figure 14 shows the power current variation with respect to altitude change. It indicates clearly the high current change due to climbing. The current with respect to data no. 22 is about 0A since the UAV is on the ground and ready to take off.
Figure 15 shows the APRS OBU reporting positions and the in-flight UAV displays on the UTM surveillance system.
Figure 16 shows the UAV surveillance data of 6-DoF UAV. The turning in the flight can be easily identified by observing the change of yaw angle. In addition, the NED-based velocities can be used to determine the flight direction. For example, the velocities of data no. 25 indicate the UAV flight direction is in southwest by south. In this test, the GTS receives all of the APRS OBU reporting surveillance data with the complete 90 bytes.
The UAV attitude can be shown on UTM display during flight performance, these are data no. 36 and 37 in test case 2 in
Figure 17.
Using a different presentation, the UAV attitude can be displayed as a primary flight display (PFD) in
Figure 18 while the UAV is turning. This is more convenient for observing the UAV’s in-flight situation.
4. Discussion
Through 19 flight tests, the CJCU GTS collected 1330 packets of data out of the 1331 transmitted from the APRS OBU. Each data packet has a complete 90 bytes for surveillance with position and 6 DoF to the UTM cloud. These tests are based on the APRS OBU with 0.5 W radio power and GTS using 6 dBi antenna. From authors’ experience, carefully adjusting the voice volume of RF receiver in GTS is an important step to reduce the rate of missing data. The rate of missing data is about 0.07% in these tests. It is concluded that the APRS ADS-B like system works well for UTM operation in transmission reliability and data continuity. Moreover, the APRS ADS-B like system collects 6-DoF data for UAV flying onto the UTM cloud. The big data will form the basis for further analysis and study on UAV flight operation quality assurance (FOQA).
Since the reporting interval of the APRS OBU is around 10 s, the 90 byte surveillance data reveals conditions of the UAV in-flight quickly. They are valuable not only for identifying the flight direction, position, operation, etc., but also for predicting the health of a UAV in-flight using the surveillance data stored in the UTM cloud. For example, the excessive drop in voltage indicates damage on the UAV battery.
The UTM system can offer UAV service providers with in-flight data as redundancy if any malfunction or lost contact during the flight occurs. Under request, the UTM system can offer the pilots or UAV service providers to back up the flight data.
5. Conclusions
In UTM development, the proper OBU for surveillance data reporting is the key device to support the complete UAV surveillance. This study develops a APRS OBU, based on available LightAPRS modules, capable of reporting the GPS position and UAV 6 DoF acquired from Pixhawk FC. Moreover, the APRS GTS is also developed to relay the 90 byte surveillance data onto the UTM cloud. By conducting 19 flight tests at different sites from 4 km to 40 km away from the CJCU GTS, the GTS collected 1330 packets of data out of 1331 reported from the APRS OBU. Each received data packet in the GTS has a complete 90 bytes for surveillance with position and UAV 6 DoF. The test results verify the availability of the APRS OBU to successfully transmit surveillance data to the UTM Cloud with satisfactory continuity and reliability. Furthermore, the APRS GTS deployment, with a low rate of missing data, covers a 40 km radius at a specific frequency 144.61 MHz.
Based on the test results mentioned above, the developed APRS ADS-B like system is capable of working in the Tainan City UAV Integrated Pilot Program (IPP), and supports full surveillance for rotor-wing UAVs flying 30 m above ground level to fixed-wing UAVs flying in high altitudes. According to APRS ADS-B like functional capability, its altitude coverage can be extended to 20,000 feet or higher. By distinguishing UAVs from manned aircraft, the UTM can offer services to rotor-wing UAVs flying below 400 feet or fixed-wing UAVs flying higher.
The development of hierarchical UTM [
4] proposes four candidates of ADS-B like [
6] on-board unit for UAVs to report data periodically to UTM cloud. Complete flight surveillance can be accomplished with ADS-B like supports. It is the most important progress for UAV flight under effective UTM operation [
15].






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}