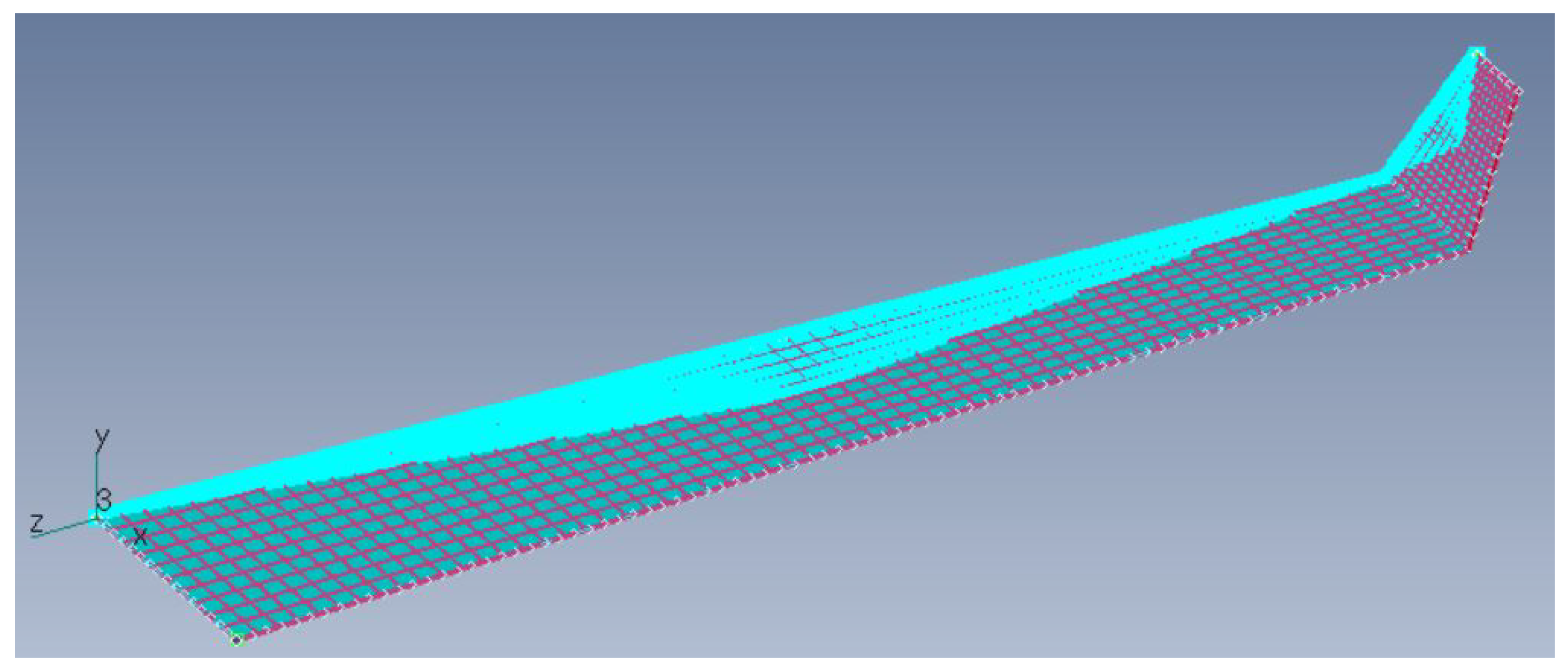
The DLM is an aerodynamic finite element method for modelling oscillating lifting surfaces that reduces to the Vortex-Lattice Method at zero reduced frequency. Each of the interfering surfaces (or panels) is divided into small trapezoidal lifting elements (“boxes”), such that the boxes are arranged in strips parallel to the free stream with surface edges, fold lines, and hinge lines lying on box boundaries. Uniform concentration of the unknown lifting pressures across the one-quarter chord line of each box is assumed. On the three-quarter chord line of the box there is one control point per box centered span-wise and the surface normal wash boundary condition is satisfied at each of these points. The number of finite elements (boxes) required for accurate results depend on different parameters, such as the aspect ratio and reduced frequency. At high reduced frequency, the chord-wise dimension of the boxes must be small. However, an approximation in the method that the variation of the numerator of the incremental oscillatory kernel function is parabolic across the span of the box bound vortex, restricts the box aspect ratio to approximately 3. If a higher order approximation is used for the span-wise variation of the numerator of the incremental oscillatory kernel, the limitation on box aspect ratio can be relaxed and the number of span-wise divisions required in high-frequency analyses will be reduced significantly, leading to a reduction in the total number of boxes. The DLM is a FEM for the solution of the oscillatory subsonic pressure-normal-wash integral equation for multiple interfering surfaces.
where
w is the complex amplitude of the dimensionless normal wash,
p is the complex amplitude of the lifting pressure coefficient, (
x,
s) is the orthogonal coordinates on the
nth surface S, such that the undisturbed stream is parallel to the
x-axis, and
K is the complex acceleration potential kernel for oscillatory subsonic flow. The original DLM algorithm was presented at the same time (1968) as the Lifting Line Element Method (LLEM) of Stark®. Although numerous comparisons@ with experiments were shown at the time, the complete details of the LLEM were never published. A refinement to the expressions for the kernel given by Rodemich® and Landahl was presented by Rodden, Giesing, and Kalman in the form
in order to analyze the non-planar interference correctly.
, and
, are the planar and non-planar parts of the kernel numerator, respectively. Here,
is the frequency,
is the distance between the sending and receiving points parallel to the freestream, and U is the velocity of the freestream,
where
and
are the Cartesian distances between sending and receiving points perpendicular to the freestream, and
and
are the dihedral angles at the receiving and sending points, respectively. The description of
and
as the planar and non-planar parts of the kernel numerator is a convenience, because both are obviously non-planar in general. The refinement in the equation was found necessary so that the DLM could predict the interference between a nearly planar wing and horizontal tail, The refinement retained the original primary approximation, i.e., that the incremental oscillatory normal wash factors are obtained by integrating the difference between the oscillatory and steady kernels over the length of the bound vortex assuming a quadratic (parabolic) variation in the numerator of the difference. The total normal-wash factor is then the sum of the incremental oscillatory normal-wash factor and the steady normal-wash factor obtained from the expressions for a horseshoe vortex, e.g., the Vortex—Lattice Method (VLM) of Hedman. In this way, the DLM converges to the VLM at zero reduced frequency, and the error in the parabolic approximation of the kernel numerator difference is small at low reduced frequencies and increases with the reduced frequency [
11,
12].
The Doublet–Lattice method (DLM) can be used for interfering lifting surfaces in subsonic flow. The following general remarks summarize the essential features of the method.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}