It is well-known that valuable resources, including water ice and volatile compounds are located in the permanently shadowed regions (PSRs) on the lunar surface. Because of the lack of illumination by sunlight in the PSRs, navigation methods that use visual images, such as visual simultaneous localization and mapping (SLAM), will be constrained significantly if not completely invalidated. Therefore, some alternative navigation methodology is needed to enable long and efficient exploration of the PSRs. From another perspective, in order to reduce the risk associated with lunar exploration missions, the use of nano-rovers and/or micro-rovers is being discussed [
2]. Since the locations of various resources are not known precisely, wide-range exploration by multiple small rovers must be conducted to identify the locations of resources precisely. Therefore, multiple-user navigation is urgently required. Furthermore, considering that the budget for early-stage lunar exploration is limited, we reason that a low-cost system using microsatellites has a great potential to accelerate lunar missions. In summary, our target in this study is a low-cost micro-sized lunar navigation satellite system that can provide precise locations, i.e., within 100 m, for multiple small rovers.
To date, navigation technologies for the shadowed regions have been studied extensively. One study investigated the use of rovers with visual sensor-based navigation using a stereo camera with artificial light to explore the PSRs [
3,
4]. However, considering that a huge amount of power (calculated to be 864 W based on [
3,
4]) is required to provide sufficient light to illuminate a broad and continuous area, this approach is limited to large-scale rovers, i.e., rovers that weigh several hundred kilograms. Another study was conducted that considered the use of another type of visual sensor-based navigation, i.e., laser triangulation systems, on rovers to identify terrain profiles in the shadowed regions [
3]. A laser triangulation system effectively uses its own light source by limiting the sensing area, and its power consumption can be reduced to a few watts by carefully selecting short distances, i.e., a few meters [
3]. However, such applications have an inherent problem in that they cannot determine distances if the lunar surface is flat and repetitive and if there are no landmarks that can be used to assess distances [
5]. Therefore, given the uncertainty of lunar terrains, there is significant risk associated with using visual sensor-based methods that have limited sensing ranges. Another study investigated a combination of the rover’s inertia accelerometers and star tracker measurements for navigating rovers on the lunar surface [
6]. In order to achieve 100-m position accuracy with this method, theoretically, 11.8-arcsecond user attitude determination is required, which is not feasible in the presence of sensor alignment errors. Another recent study introduced the idea of deploying orbiters in Halo orbits to establish a lunar global navigation satellite system (Lunar GNSS) analogous to Earth GNSS [
7,
8]. The Lunar GNSS proposed by these previous studies was based on time of arrival (TOA), i.e., pseudorange measurement, and it requires that at least four satellites be visible all the time, which inevitably requires a large number of satellites and, consequently, a large cost, but it only requires users to carry a passive ranging receiver. In an attempt to further reduce the costs of the system, some researchers have investigated the reduction of the number of satellites. Navigation technologies that use fewer than two satellites with a passive user receiver have been discussed extensively in the field of Earth GNSS applications [
9]. One of these studies used angle of arrival (AOA) data and reduced the number of navigation satellites down to one [
10]. However, this algorithm provides low position accuracy because a very small error in the AOA measurement results in a large error in the user position; i.e., a 1-degree error in the AOA for a distance of a few hundred km between the satellite and the user results in an error of a few kilometers in the position on the lunar surface. Another algorithm uses time difference of arrival (TDOA or single-differenced pseudorange) and/or frequency difference of arrival (FDOA, or single-differenced Doppler) to reduce the number of navigation satellites to a minimum of two [
11]. Moreover, one study successfully showed that single-differenced Doppler using a static reference station, known as Law of Cosines (LOC), can provide a high-accuracy position with as little as one satellite on the lunar surface at the specified condition with several tens of minutes observation [
12]. Furthermore, the authors of reference [
12] also proposed an algorithm that uses a combination of range and Doppler measurements with a static reference station, known as Joint Doppler and Ranging (JDR), and achieved 3D positioning with as little as one satellite [
13]. Basically, these previous studies [
7,
8,
9,
10,
11,
12,
13] are based on the assumption that both the satellite and the user system or either the satellite system or the user system can provide a stable clock and/or a stable frequency without an offset (bias), and the estimation algorithms do not have to account for those errors. Such approaches also require the satellites and/or the user to carry a highly stable clock source, such as an atomic clock, in order to maintain a sufficiently small clock bias and frequency bias between bias estimations by ground segments (i.e., ground stations on the earth); otherwise the accuracy of the user position deteriorates immediately. In addition, the target of our study comprises a micro-sized satellite and rover systems whose power generation capability is limited by size and consequently, not compatible with the deep space atomic clock (DSAC). In this case, the best current clock technology that is compatible with the micro-sized satellite is the Chip Scale Atomic Clock (CSAC). As reported in [
14], while CSAC can suppress the frequency instability of the clock down to about 1 ppb for 24 h, CSAC incurs several tens to hundreds of meters of error in pseudorange observation after 24 h, which further increases over time. As a result, using CSAC inevitably requires pseudorange-based navigation systems to conduct frequent estimations of the satellite and/or user clock bias using earth ground stations, which is very challenging in Lunar GNSS because of the limitation of the availability and number of earth ground stations that are capable of Earth–Moon distance communication. Another approach to eliminating the biases of the satellite and user clocks at the same time is to use two-way ranging between the user and the satellite [
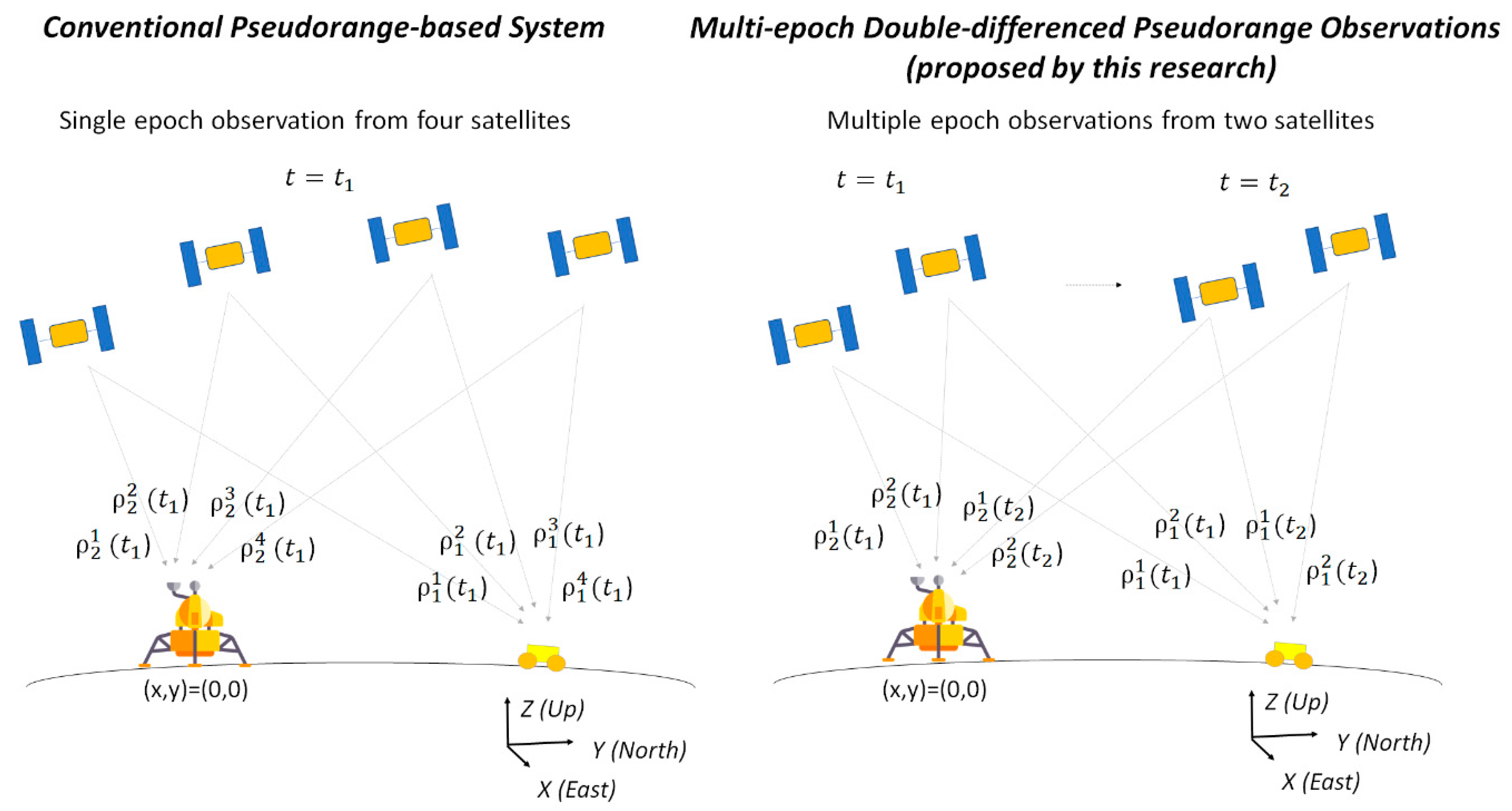
15]. However, this requires an active ranging operation between the satellite segment and the user segment (the user must send a radio signal to the satellite, and the satellite has to send the received radio signals back to each user separately), and this consequently imposes an extra burden and cost on the user segment as well as on the satellite side. In order to reduce the total cost of the system, including the user segment, a method that uses passive ranging is ideal, especially for the multiple rover missions that will occur in the future. Contrary to these previous studies, our research uses multi-epoch double-differenced pseudorange observations (MDPO), which is a passive system using a static reference station, and it works while accounting for the instability of both the satellite and user clocks. The comparison of the proposed method with other conventional methods is summarized in
Table 1.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}