
A New 3D Shaping Method for Low-Thrust Trajectories between Non-Intersect Orbits



Abstract
:1. Introduction
2. Shape-Based Method for 3D Orbital Rendezvous
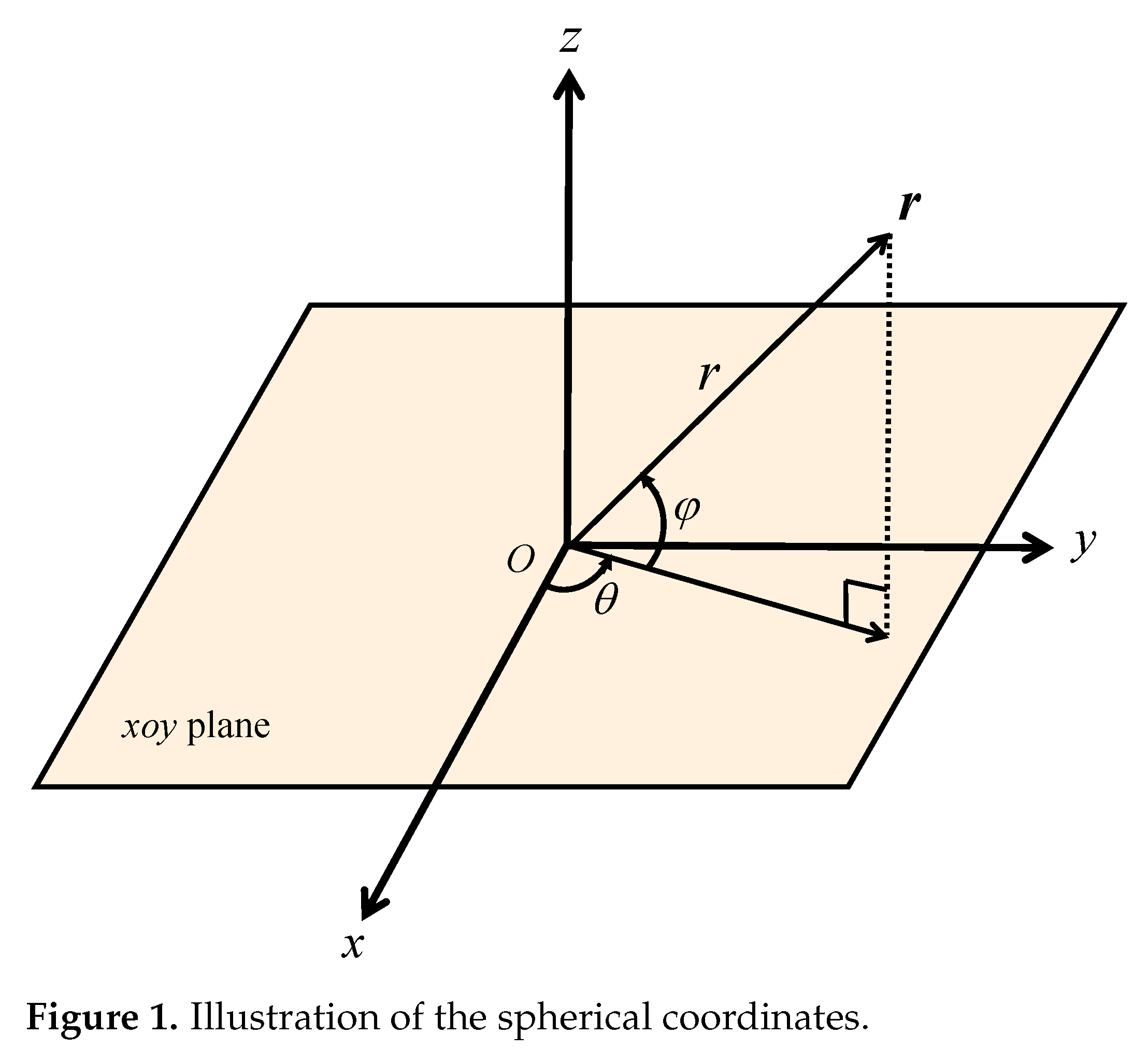
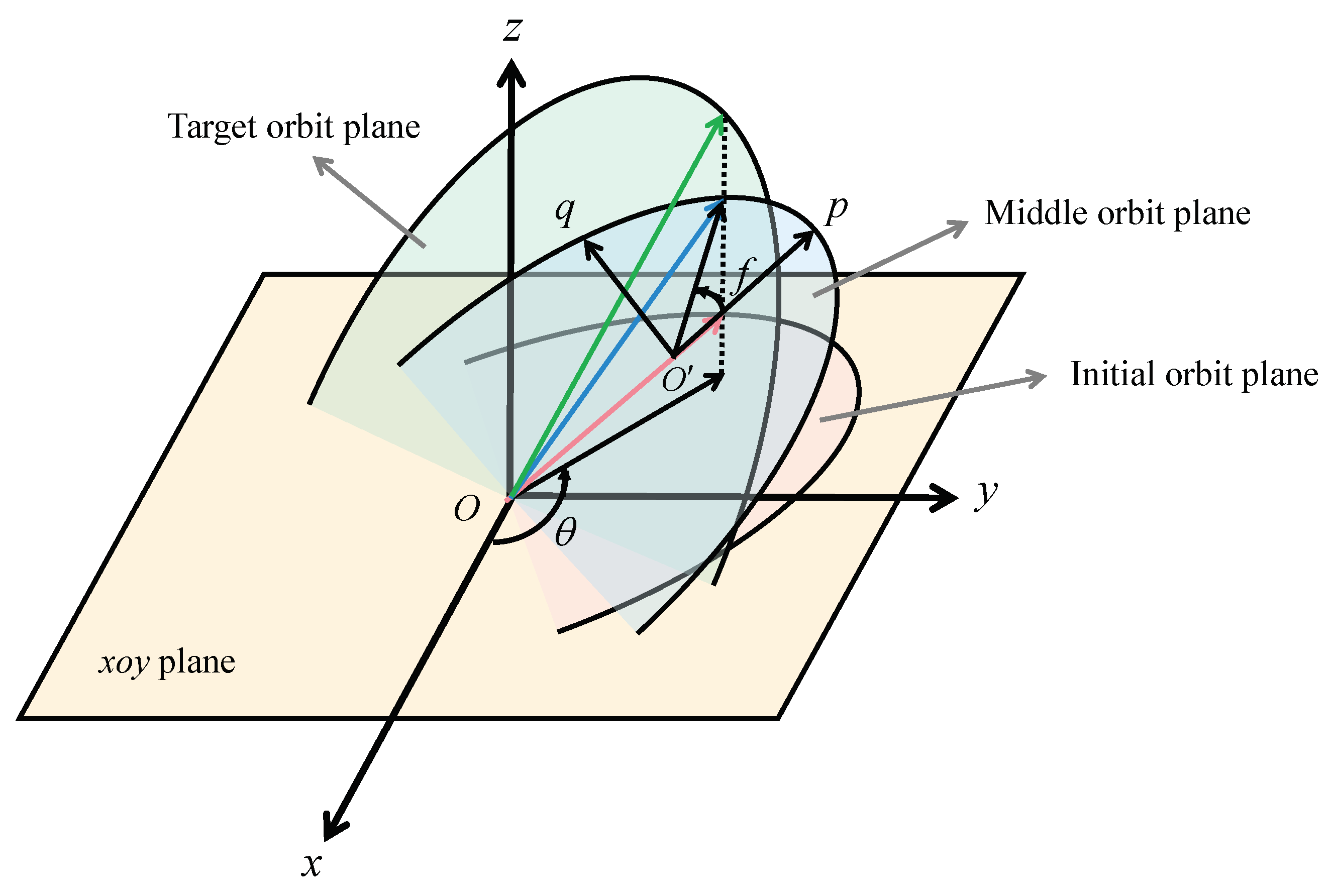
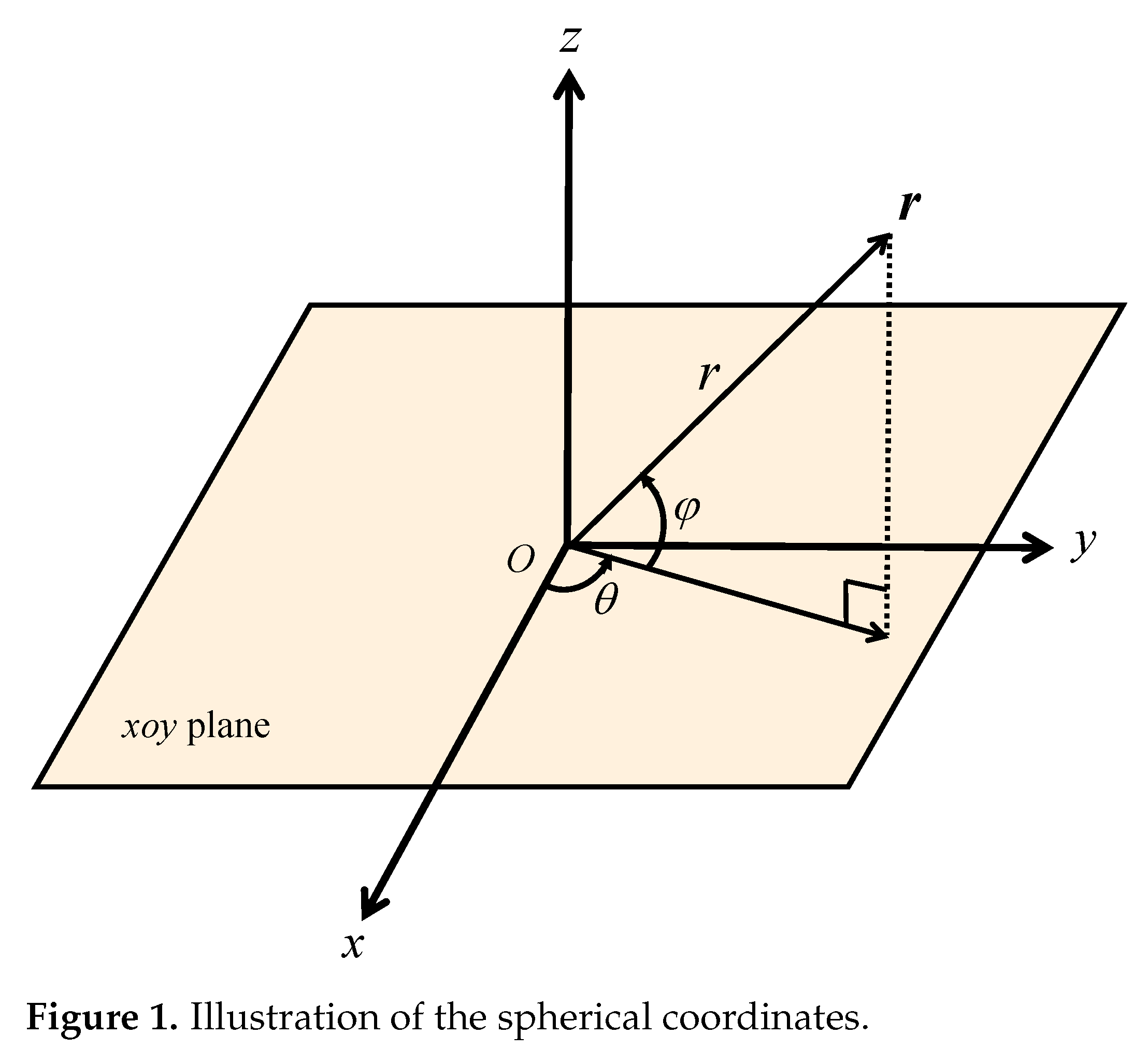
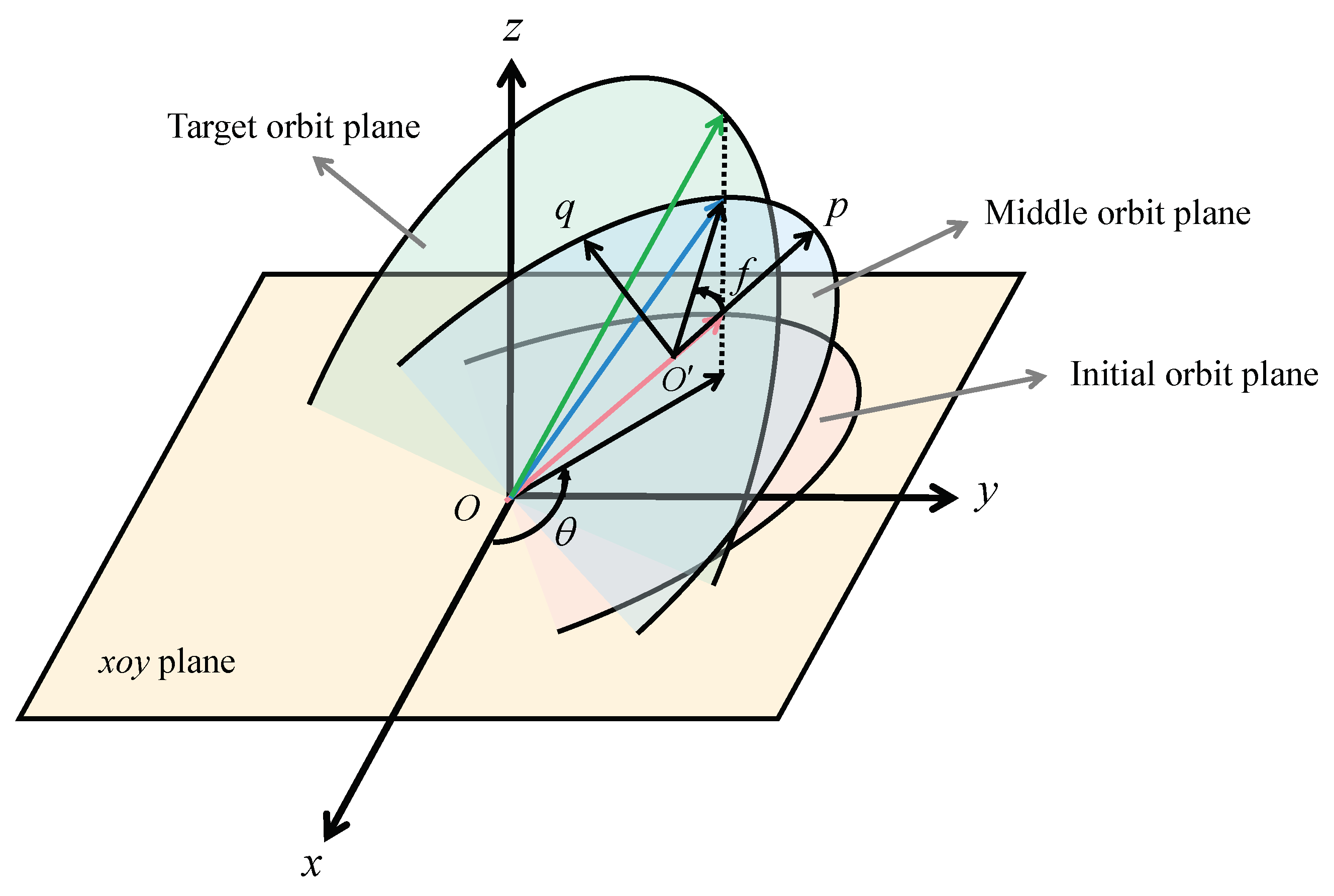
2.1. Low-Thrust Dynamics and Shape Design in Spherical Coordinates
2.1.1. Shaping the Elevation Angle
2.1.2. Shaping the Radius
2.1.3. Shaping the Time
2.2. Determination of Shaping Functions
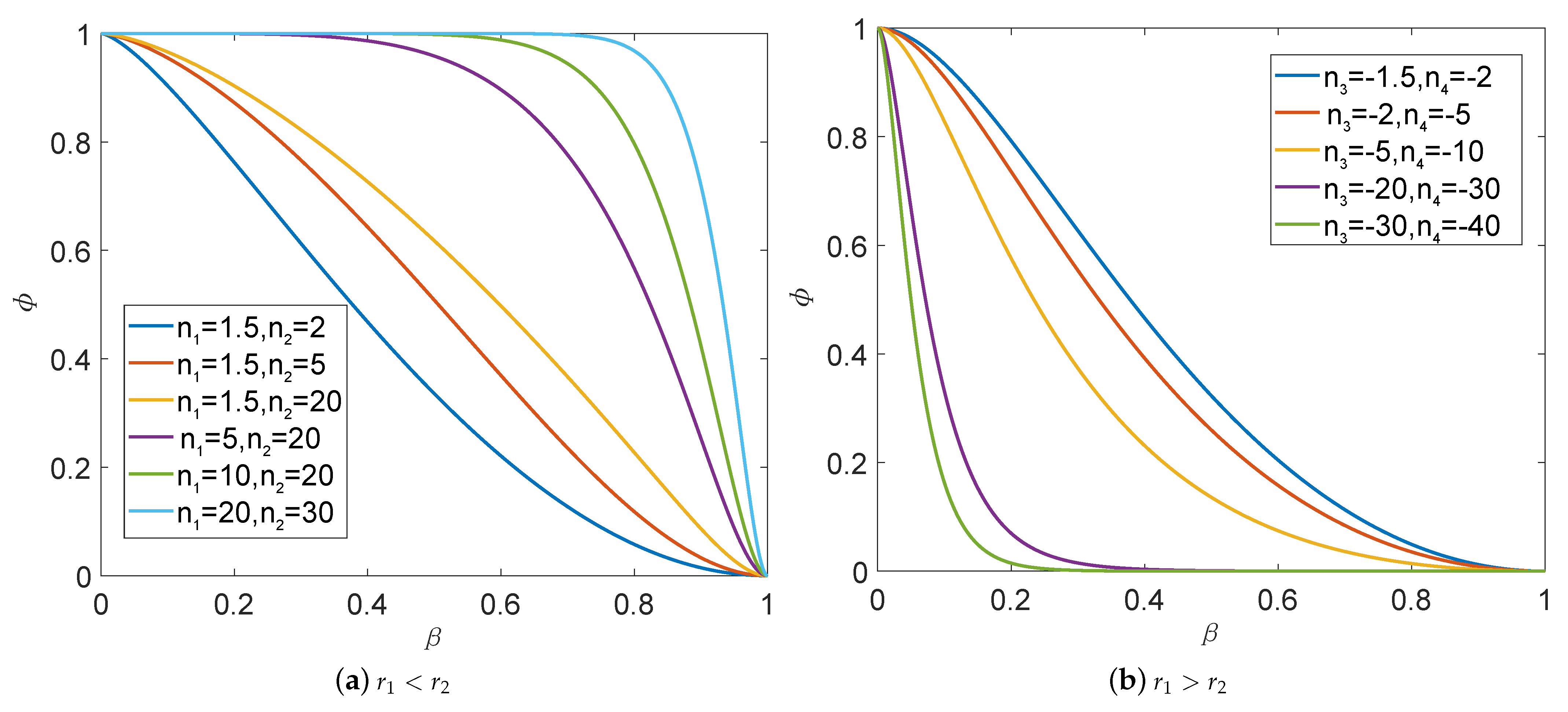
2.2.1. Determination of Interpolation Function
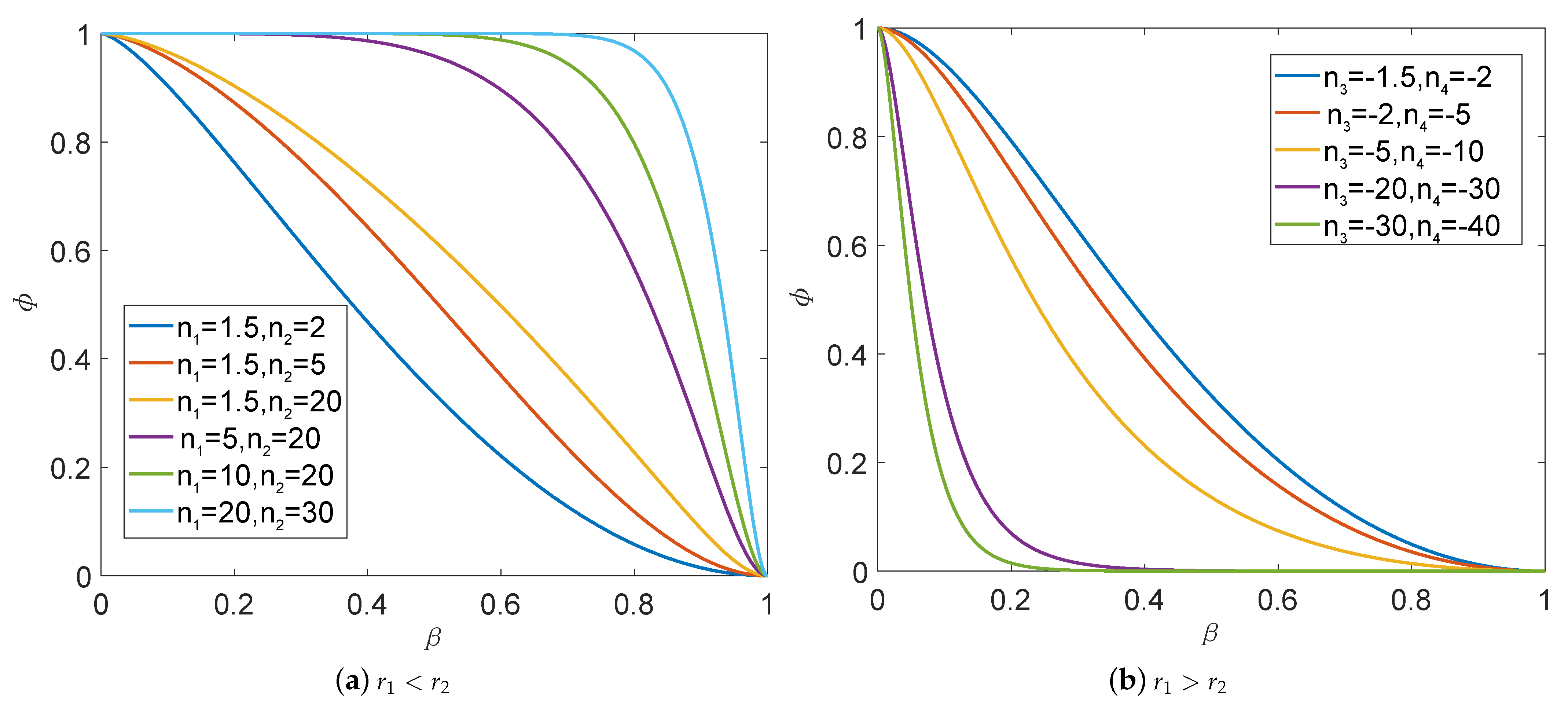
2.2.2. Determination of Coefficients in Radius
3. Application in Indirect Trajectory Optimization
3.1. Optimization Model
3.2. Adjoint Estimation Based on Shape-Based Method
3.3. Adjoint Normalization
4. Numerical Examples
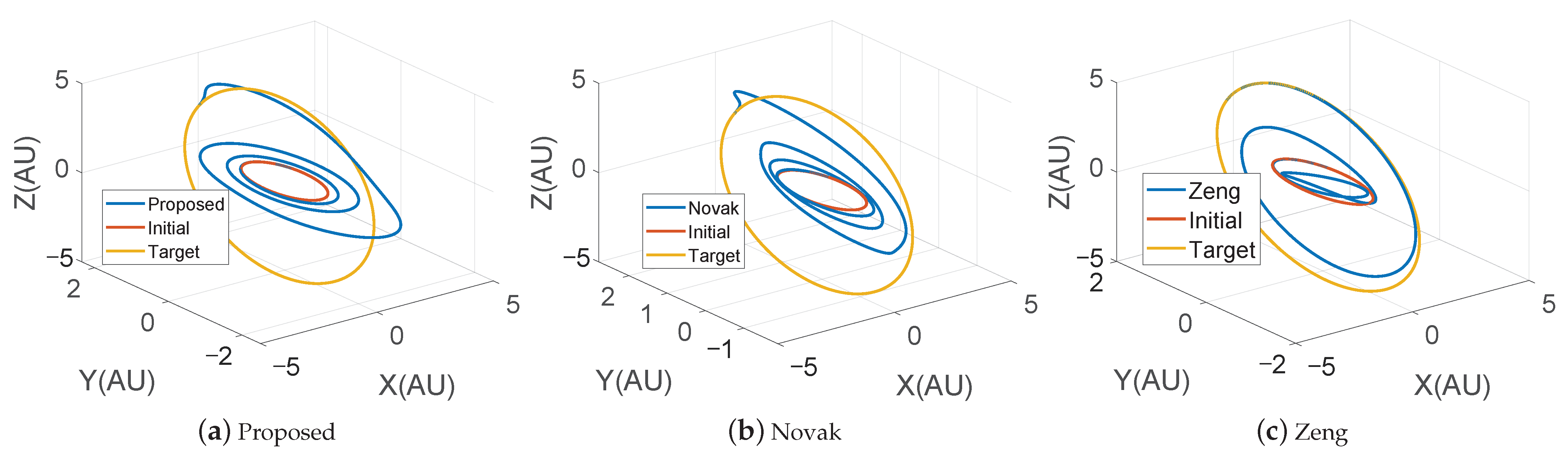
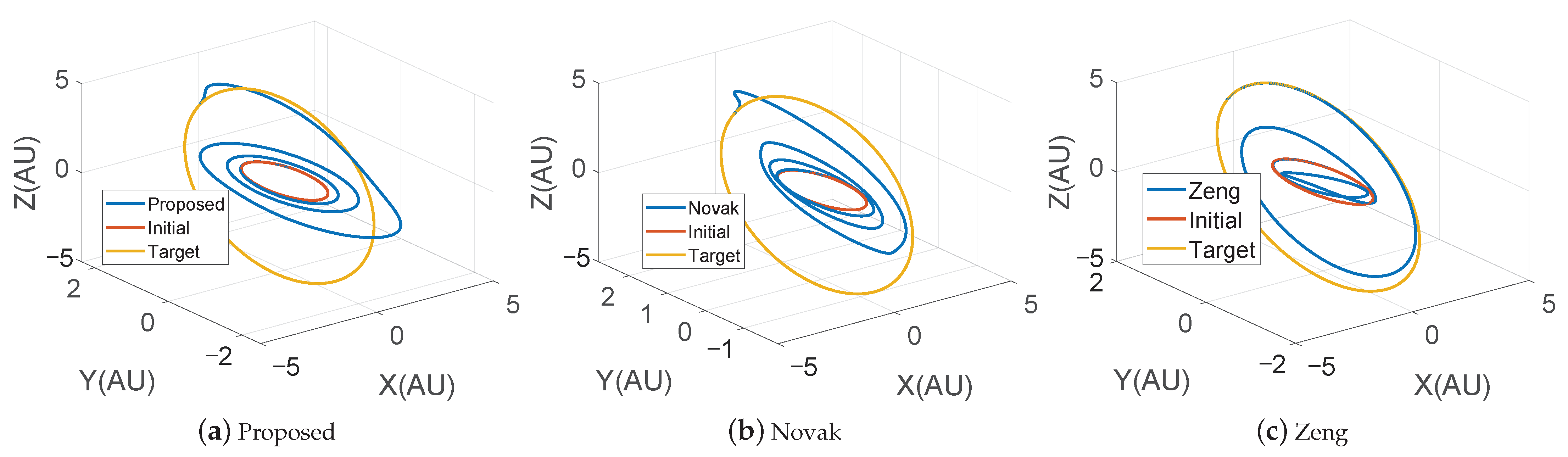
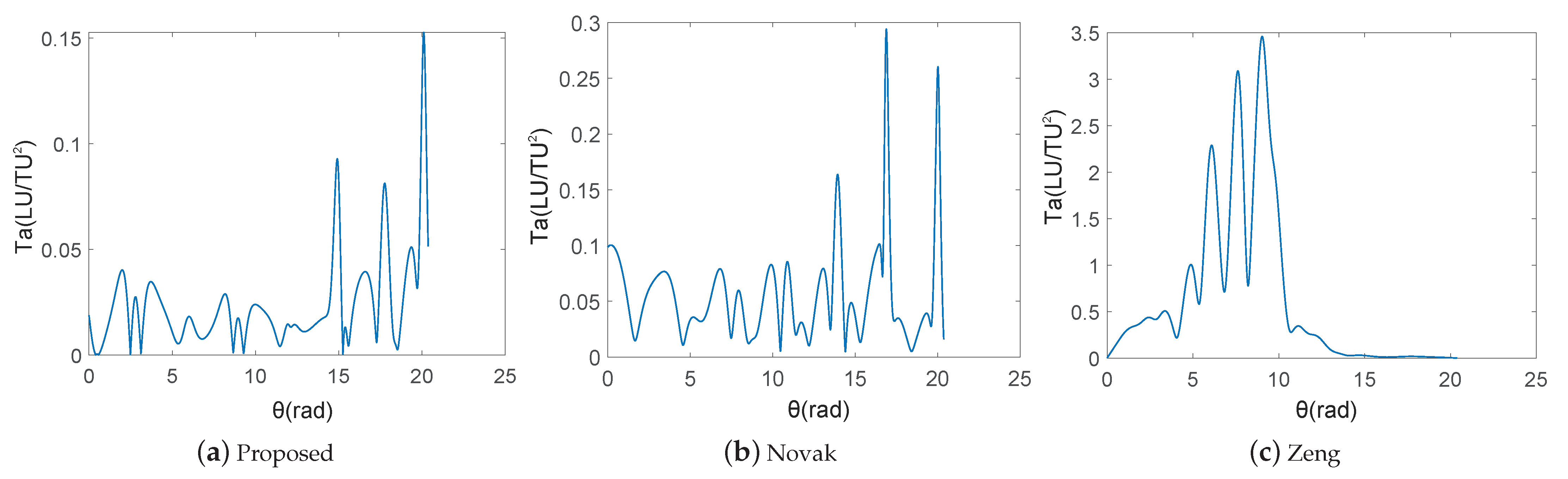
4.1. Rendezvous Mission A from Inner Orbit to Outer Orbit
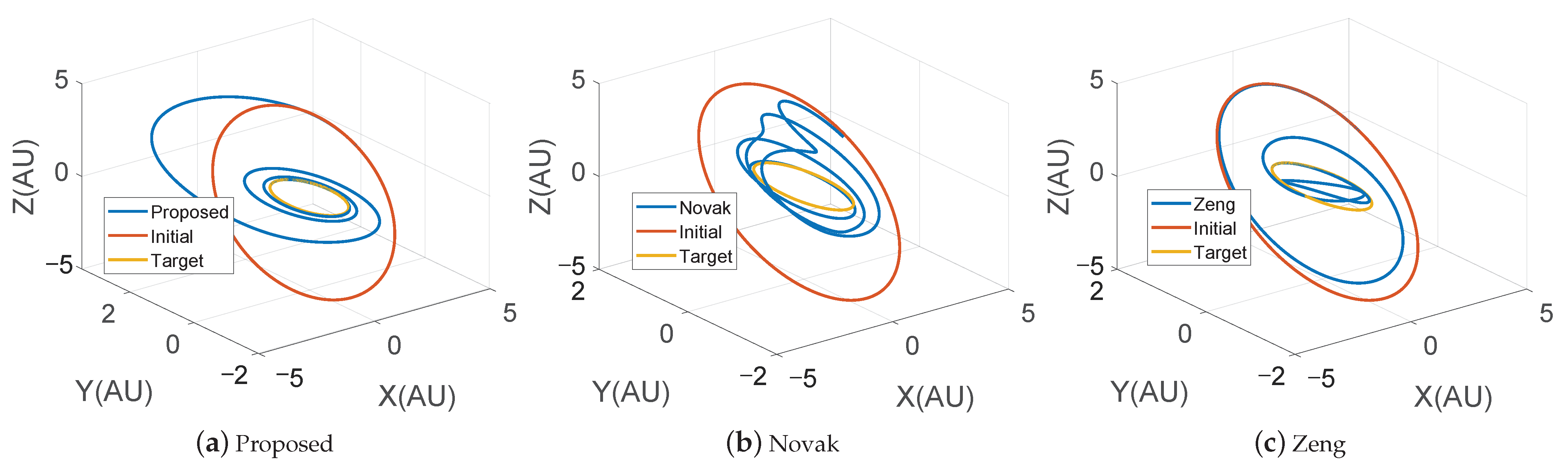
4.2. Rendezvous Mission B from Outer Orbit to Inner Orbit
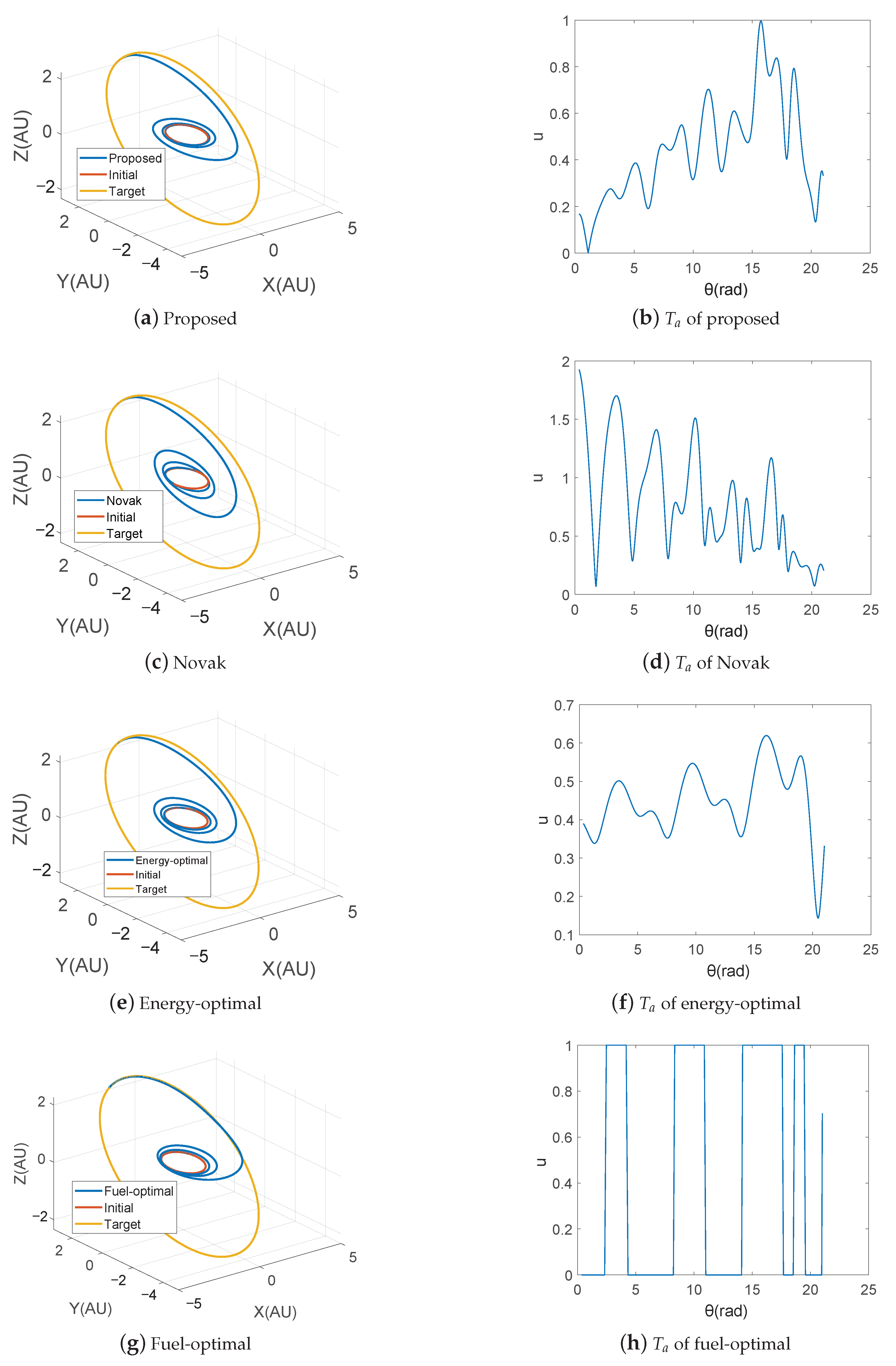
4.3. Adjoint Estimation with Shape-Based Method
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Betts, J. Survey of Numerical Methods for Trajectory Optimization. J. Guid. Control. Dyn. 1998, 21, 193–207. [Google Scholar] [CrossRef]
- David, G.H. Conversion of Optimal Control Problems into Parameter Optimization Problems. J. Guid. Control. Dyn. 1997, 20, 57–60. [Google Scholar]
- Caruso, A.; Quarta, A.A.; Mengali, G. Comparison between Direct and Indirect Approach to Solar Sail Circle-to-circle Orbit Raising Optimization. Astrodynamics 2019, 3, 273–284. [Google Scholar] [CrossRef]
- Yan, H.; Wu, H. Initial Adjoint-Variable Guess Technique and Its Application in Optimal Orbital Transfer. J. Guid. Control. Dyn. 1999, 22, 490–492. [Google Scholar] [CrossRef]
- Mantia, M.; Casalino, L. Indirect Optimization of Low-Thrust Capture Trajectories. J. Guid. Control. Dyn. 2006, 29, 1011–1014. [Google Scholar] [CrossRef]
- Martell, C.A.; Lawton, J.A. Adjoint Variable Solutions via an Auxiliary Optimization Problem. J. Guid. Control. Dyn. 2015, 18, 1267–1272. [Google Scholar] [CrossRef]
- Kluever, C.A.; Pierson, B.L. Optimal Low-Thrust Earth-Moon Transfers with a Switching Function Structure. J. Astronaut. Sci. 1994, 42, 269–283. [Google Scholar]
- Kluever, C.A.; Pierson, B.L. Optimal Low-thrust Three-Dimensional Earth-Moon Trajectories. J. Guid. Control Dyn. 1995, 18, 830–837. [Google Scholar] [CrossRef]
- Gao, Y.; Kluever, C. Low-Thrust Interplanetary Orbit Transfers Using Hybrid Trajectory Optimization Method with Multiple Shooting. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Providence, RI, USA, 16–19 August 2004. [Google Scholar]
- Yang, H.; Tang, G.; Jiang, F. Optimization of Observing Sequence Based on Nominal Trajectories of Symmetric Observing Configuration. Astrodynamics 2018, 107, 25–37. [Google Scholar] [CrossRef]
- Petropoulos, A.E.; Longuski, J.M. Shape-Based Algorithm for the Automated Design of Low-Thrust, Gravity Assist Trajectories. J. Spacecr. Rocket. 2004, 41, 787–796. [Google Scholar] [CrossRef] [Green Version]
- Wall, B.J.; Conway, B.A. Shape-Based Approach to Low-Thrust Rendezvous Trajectory Design. J. Guid. Control. Dyn. 2009, 32, 95–101. [Google Scholar] [CrossRef]
- Wall, B.J.; Pols, B.; Lanktree, B. Shape-based Approximation Method for Low-thrust Interception and Rendezvous Trajectory Design. Adv. Astronaut. Sci. 2010, 136, 1447–1458. [Google Scholar]
- Wall, B.J. Shape-Based Approximation Method for Low-Thrust Trajectory Optimization. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008. [Google Scholar]
- Novak, D.M.; Vasile, M. Improved Shaping Approach to the Preliminary Design of Low-Thrust Trajectories. J. Guid. Control. Dyn. 2011, 34, 128–147. [Google Scholar] [CrossRef] [Green Version]
- Xie, C.; Zhang, G.; Zhang, Y. Simple Shaping Approximation for Low-Thrust Trajectories Between Coplanar Elliptical Orbits. J. Guid. Control. Dyn. 2015, 38, 2448–2455. [Google Scholar] [CrossRef]
- Xie, C.; Zhang, G.; Zhang, Y. Shaping Approximation for Low-Thrust Trajectories with Large Out-of-Plane Motion. J. Guid. Control Dyn. 2016, 39, 2776–2786. [Google Scholar] [CrossRef]
- Zeng, K.; Geng, Y.; Wu, B. Shape-Based Analytic Safe Trajectory Design for Spacecraft Equipped with Low-Thrust Engines. Aerosp. Sci. Technol. 2017, 62, 87–97. [Google Scholar] [CrossRef]
- Jiang, F.; Baoyin, H.; Li, J. Practical Techniques for Low-Thrust Trajectory Optimization with Homotopic Approach. J. Guid. Control. Dyn. 2012, 35, 245–258. [Google Scholar] [CrossRef]
- Petukhov, V.G. Optimization of Interplanetary Trajectories for Spacecraft with Ideally Regulated Engines Using the Continuation Method. Cosm. Res. 2008, 46, 219–232. [Google Scholar] [CrossRef]
- Jiang, F.; Tang, G.; Li, J. Improving Low-Thrust Trajectory Optimization by Adjoint Estimation with Shape-Based Path. J. Guid. Control. Dyn. 2017, 40, 1–8. [Google Scholar] [CrossRef]
- Taheri, E.; Kolmanovsky, I.; Atkins, E. Enhanced Smoothing Technique for Indirect Optimization of Minimum-Fuel Low-Thrust Trajectories. J. Guid. Control. Dyn. 2016, 39, 2500–2511. [Google Scholar] [CrossRef] [Green Version]
- Lewallen, J.M.; Schwausch, O.A.; Tapley, B.D. Coordinate System Influence on the Regularized Trajectory Optimization Problem. J. Spacecr. Rocket. 1971, 8, 15–20. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mission A () | Mission B () | |||
|---|---|---|---|---|
| Orbit Elements | Initial Orbit | Target Orbit | Initial Orbit | Target Orbit |
| Semi-major axis | 1 | 4 | 4 | 1 |
| Eccentricity | 0.01 | 0.1 | 0.1 | 0.01 |
| Inclination | ||||
| Right ascension | ||||
| Argument of periapsis | ||||
| True anomaly |
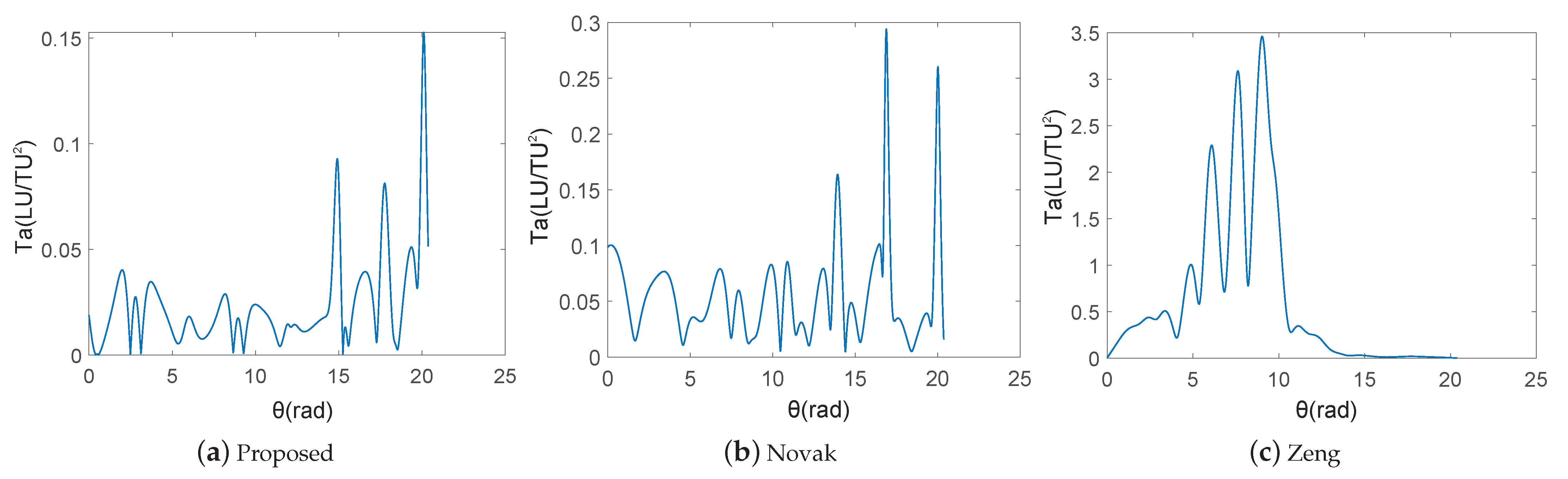
| Method | (VU) | () |
|---|---|---|
| Proposed | 1.5938 | 0.1527 |
| Novak | 2.8070 | 0.2943 |
| Zeng | 10.2439 | 3.4581 |
| Proposed | Novak | Zeng | ||||
|---|---|---|---|---|---|---|
| (VU) | () | (VU) | () | (VU) | () | |
| 90 | 1.7764 | 0.2229 | N/A | N/A | 2.4425 | 0.2997 |
| 80 | 1.7060 | 0.2040 | N/A | N/A | 2.3723 | 0.2442 |
| 70 | 1.6474 | 0.1831 | N/A | N/A | 2.7264 | 0.3755 |
| 60 | 1.6048 | 0.1607 | 2.7395 | 0.2797 | 6.4289 | 1.2344 |
| 50 | 1.5838 | 0.1378 | 3.0000 | 0.5310 | N/A | N/A |
| 40 | 1.7249 | 0.2099 | N/A | N/A | N/A | N/A |
| 30 | 2.3449 | 0.4569 | N/A | N/A | N/A | N/A |
| Proposed | Novak | Zeng | ||||
|---|---|---|---|---|---|---|
| (VU) | () | (VU) | () | (VU) | () | |
| 2.6785 | 0.7977 | N/A | N/A | 9.4952 | 2.4343 | |
| 1.5938 | 0.1527 | 2.8070 | 0.2943 | 10.2439 | 3.4581 | |
| 1.1906 | 0.0651 | 1.8830 | 0.1006 | 10.2524 | 4.1412 | |
| 0.9553 | 0.0381 | 1.2862 | 0.0706 | 9.8555 | 4.6166 | |
| 0.7887 | 0.0257 | 0.8931 | 0.0548 | 9.2535 | 5.0227 | |
| 0.6539 | 0.0228 | 0.6582 | 0.0393 | 8.6234 | 5.7724 | |
| 0.5465 | 0.0212 | 0.5384 | 0.0256 | 8.1394 | 7.2918 |
| Method | (VU) | () |
|---|---|---|
| Proposed | 1.8345 | 0.3646 |
| Novak | N/A | N/A |
| Zeng | 14.2508 | 6.4255 |
| 3000 | 0.8 | 5000 |
| Method | POC | ||
|---|---|---|---|
| Proposed | |||
| Proposed (normalization) | |||
| Novak | |||
| Novak (normalization) | |||
| Energy-optimal | N/A | ||
| Fuel-optimal | N/A |
| Proposed | Proposed (Normalization) | Novak | Novak (Normalization) | |
|---|---|---|---|---|
| N/A | N/A | |||
| N/A | N/A | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, T.; Wu, D.; Jiang, F.; Zhou, H. A New 3D Shaping Method for Low-Thrust Trajectories between Non-Intersect Orbits. Aerospace 2021, 8, 315. https://doi.org/10.3390/aerospace8110315
Zhang T, Wu D, Jiang F, Zhou H. A New 3D Shaping Method for Low-Thrust Trajectories between Non-Intersect Orbits. Aerospace. 2021; 8(11):315. https://doi.org/10.3390/aerospace8110315
Chicago/Turabian StyleZhang, Tongxin, Di Wu, Fanghua Jiang, and Hong Zhou. 2021. "A New 3D Shaping Method for Low-Thrust Trajectories between Non-Intersect Orbits" Aerospace 8, no. 11: 315. https://doi.org/10.3390/aerospace8110315
APA StyleZhang, T., Wu, D., Jiang, F., & Zhou, H. (2021). A New 3D Shaping Method for Low-Thrust Trajectories between Non-Intersect Orbits. Aerospace, 8(11), 315. https://doi.org/10.3390/aerospace8110315