1. Introduction
In manned aviation, the history of in-flight icing research dates back to the 1940s [
1]. For unmanned aerial vehicles (UAVs), icing research has a much shorter history and can be considered an emerging research field. Although the first analysis and reports of at mospheric icing on UAVs date back to the 1990s [
2], the research in this area has only recently gained momentum [
3]. The reason UAV icing is becoming a trending topic is partly linked to the rise of commercial applications of UAV technologies [
4]. In particular, small and medium-sized fixed-wing UAVs with wingspans of a few meters are in the focus of new business opportunities. Examples for the application of such UAVs are package deliveries, search and rescue, environmental monitoring, and agriculture [
4]. In addition, UAV technology is adapted by many defense forces around the world [
5]. Many UAV missions require operations of unmanned aircraft in adverse weather conditions [
6]. One of the main barriers to achieving an all-weather capability of UAVs is to mitigate the risk of atmospheric in-flight icing [
3].
Atmospheric icing, or in-cloud icing, occurs when an aircraft travels through a cloud containing supercooled liquid droplets that freeze upon impact with the airframe [
1]. The resulting ice accretions on the airframe have several hazardous effects: clogging of pitot tubes, adding weight, reducing propeller thrust, and degrading aerodynamic performance [
7,
8]. Ice that forms on the leading-edge of lifting surfaces changes the airfoil geometry and leads to a decrease in lift, increase in drag, and a higher stalling risk [
9].
There are several key differences between icing on manned and unmanned aircraft. An overview of the special technical and operational challenges of UAVs in icing conditions is given in [
3]. Differences are for example related to airframe size, velocity, meteorological environments, mission objectives, propulsion type, and more. One important difference between manned and unmanned icing is the disparity in the Reynolds number regime. While manned aircraft typically operate at high Reynolds numbers (
Re = 10
7–10
8), most UAVs fly at significantly lower Reynolds numbers (
Re = 10
5–10
6). This difference in the Reynolds number regime can have a significant impact on icing processes [
10]. It is therefore important that dedicated research for icing matter on UAVs is conducted at low Reynolds numbers.
Ice protection systems (IPSs) mitigate the adverse effects of ice on aircraft and are a relatively new technology on UAVs [
3]. Electrothermal IPSs are one type of system that can actively mitigate the hazards of icing and allow aircraft to operate in all-weather conditions. The advantage of such systems is that they are lightweight and a mature technology. Other active IPS systems that may be suitable for UAVs rely on mechanical or chemical (freezing point depressants) principles for ice protection. Passive systems are an emerging technology that aim to use special surfaces to reduce or prevent ice accretions.
An IPS can generally be operated in two different modes [
11]: anti-icing and de-icing. In anti-icing mode, the surface of the airfoil is heated continuously to avoid any ice accretion at any time [
12]. In de-icing mode, the surface is heated periodically, allowing for ice to build up in between the heating cycles. This intercycle ice is removed from the airframe by two processes [
13,
14]. First, ice at the interface to the surface is melted, resulting in a liquid water layer. Second, ice is shed from the airframe with the aid of the aerodynamic forces. The ice shedding efficiency is mainly depending on the geometry of the ice shape and the airspeed [
15]. The energy amount required for de-icing is typically lower compared to anti-icing, but the intercycle ice generates additional drag [
16].
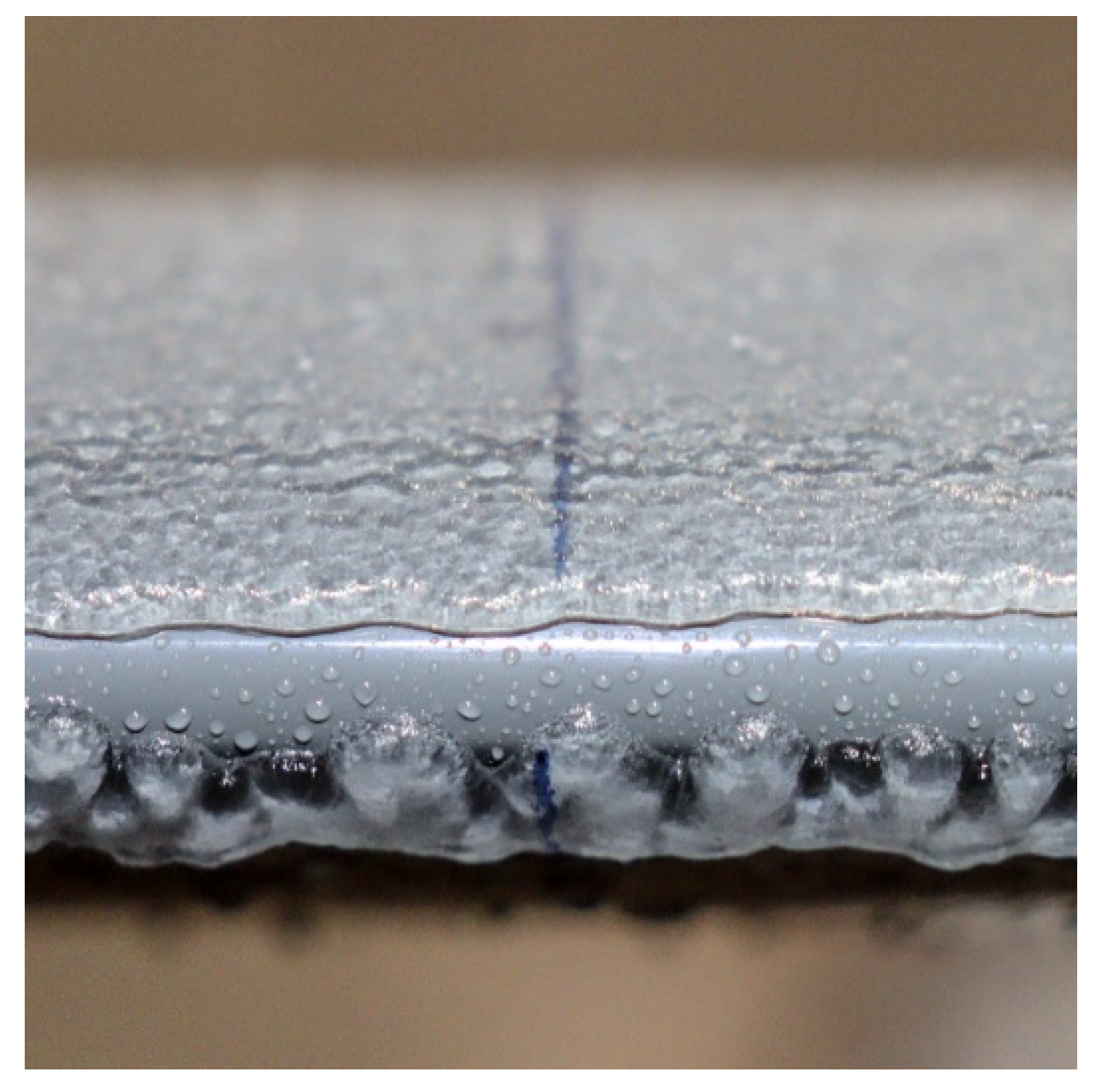
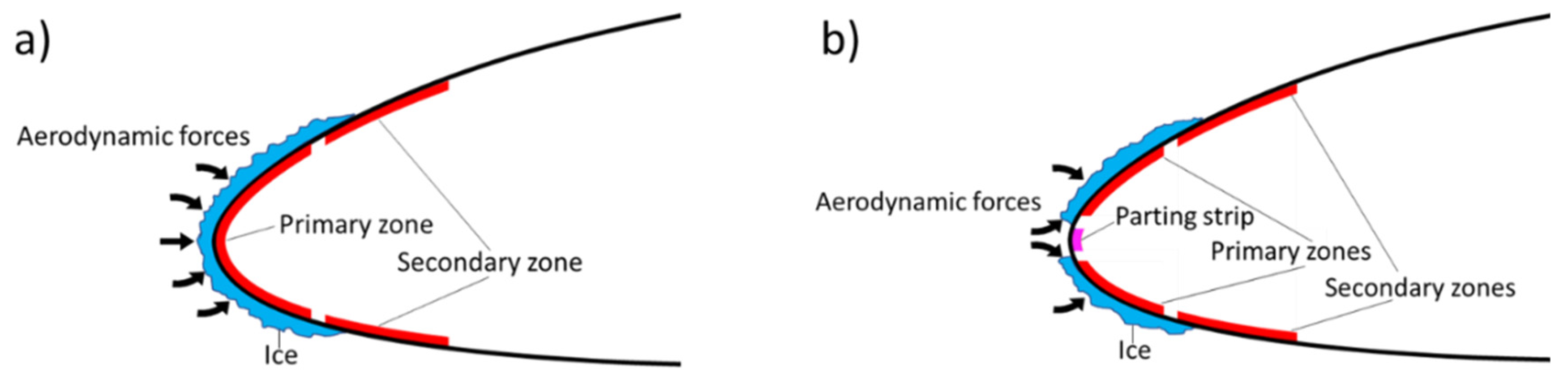
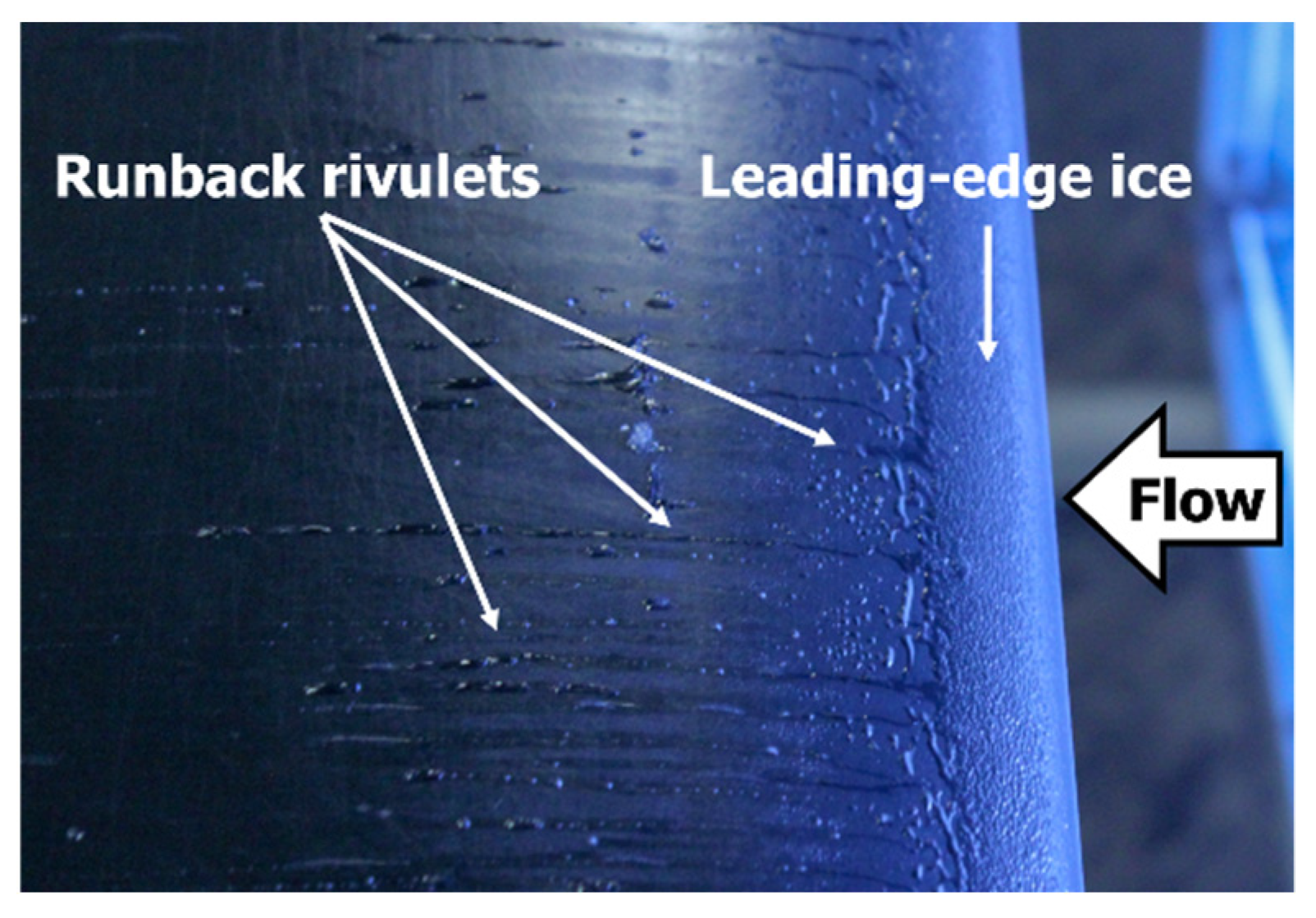
A parting strip (PS) is a special heating zone that is continuously heated and can be used to reduce the required energy for de-icing [
11]. Without a parting strip, the entire leading-edge will be covered by ice (
Figure 1). A parting strip located near the stagnation point at the leading-edge will separate the ice into an upper and a lower part (
Figure 2). This separation increases the aerodynamic forces on the ice (
Figure 3) and consequently increases ice shedding efficiency. The gap has a size of typically 2 to 3 mm.
There are several special design requirements for UAV IPSs [
3]. Most importantly, the systems need to be lightweight and energy-efficient. Electrothermal systems are well suited for UAVs since they are mature, lightweight, and can easily be retrofitted to existing airframes [
17,
18,
19,
20,
21]. Energy-efficiency is, however, a central challenge for electrothermal systems, as they require relatively high amounts of energy, compared to other IPSs like chemical or mechanical systems [
13]. The energy used for ice protection is energy lost for the propulsion system—using an electrothermal IPS consequently reduces the range and endurance of the UAV. Icephobic coatings can reduce the ice adhesion forces and are a relatively new technology that is currently under research [
22]. In the future, these systems may be especially energy-efficient in combination with an active IPS [
23].
Electrothermal systems for UAVs must be carefully designed to minimize the required heat to operate the system. The goal must be to run an IPS with the minimum required heat loads for each specific icing condition. To achieve this, a good understanding of the underlying physical processes of anti-icing and de-icing is required. In particular, the influence and interlinkage of icing and IPS parameters on the required heat loads are of significance for the design of energy-efficient systems.
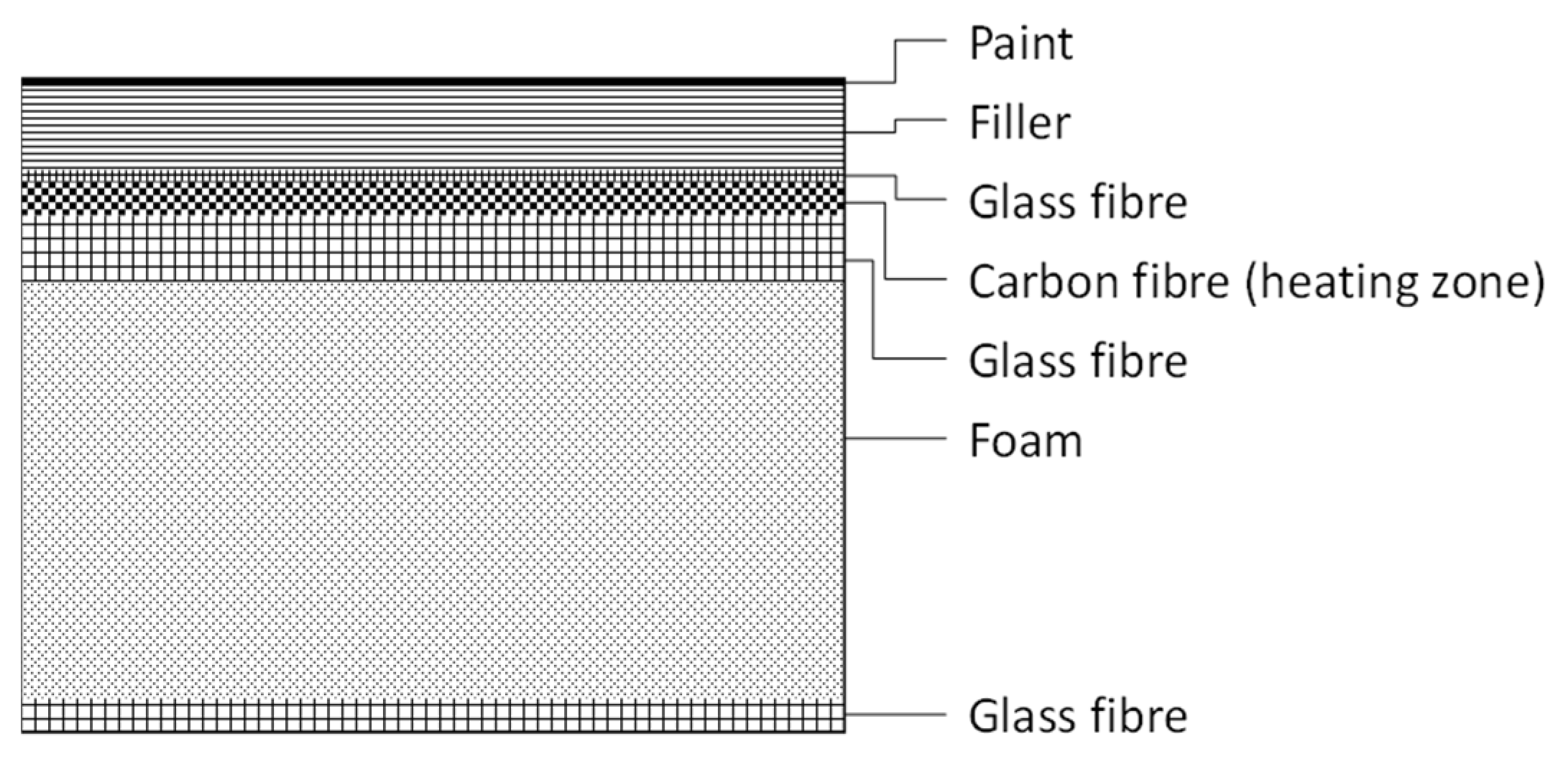
D·ICE is an electrothermal IPS that has been developed at the Centre for Autonomous Marine Operations and Systems at the Norwegian University of Science and Technology (NTNU AMOS) and commercialized by UBIQ Aerospace. The technology is based on an electrothermal heating system and an ice detection algorithm using thermal signals [
19]. The systems use heating zones made of carbon fibre fabrics.
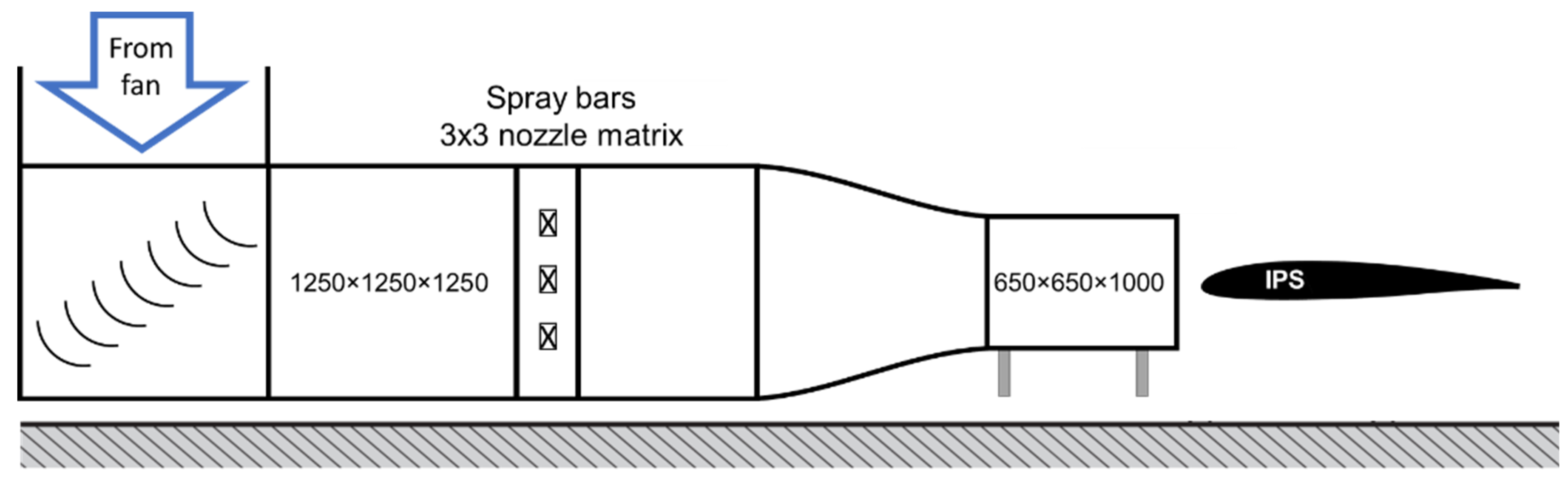
In this study, two prototypes of the D·ICE system were tested in the icing wind tunnel facility at the Technical Research Centre of Finland (VTT) during fall 2019. This study aimed to determine the required heat loads for anti-icing and de-icing for a selection of meteorological icing conditions. De-icing loads for two IPS layouts (conventional and parting strip) were compared. A parametric study over the ice shedding time was conducted for both configurations in order to better understand the effect of certain parameters on the de-icing efficiency. The experiments were conducted at low Reynolds numbers (Re = 8–9 × 105) that are typical for small to medium-sized fixed-wing UAVs.
4. Discussion
4.1. General
The main objective of this study was to compare three different IPS methods: anti-icing, conventional de-icing, and parting strip de-icing. For de-icing, several variations of ice accretion time and heat fluxes were tested. In order to identify the most energy-efficient IPS, a time-averaged energy consumption
is calculated for each case:
This value calculates the total energy that has been spent on IPS in relation to the total cycle time. The unit of is the same unit as for heat fluxes and can thus be directly compared to anti-icing heat loads.
The comparison is performed for each ambient temperature separately (
Figure 16). Heat flux levels were indicated with “low”, “mid”, and “high” and their numeric value can be identified from
Figure 11 and
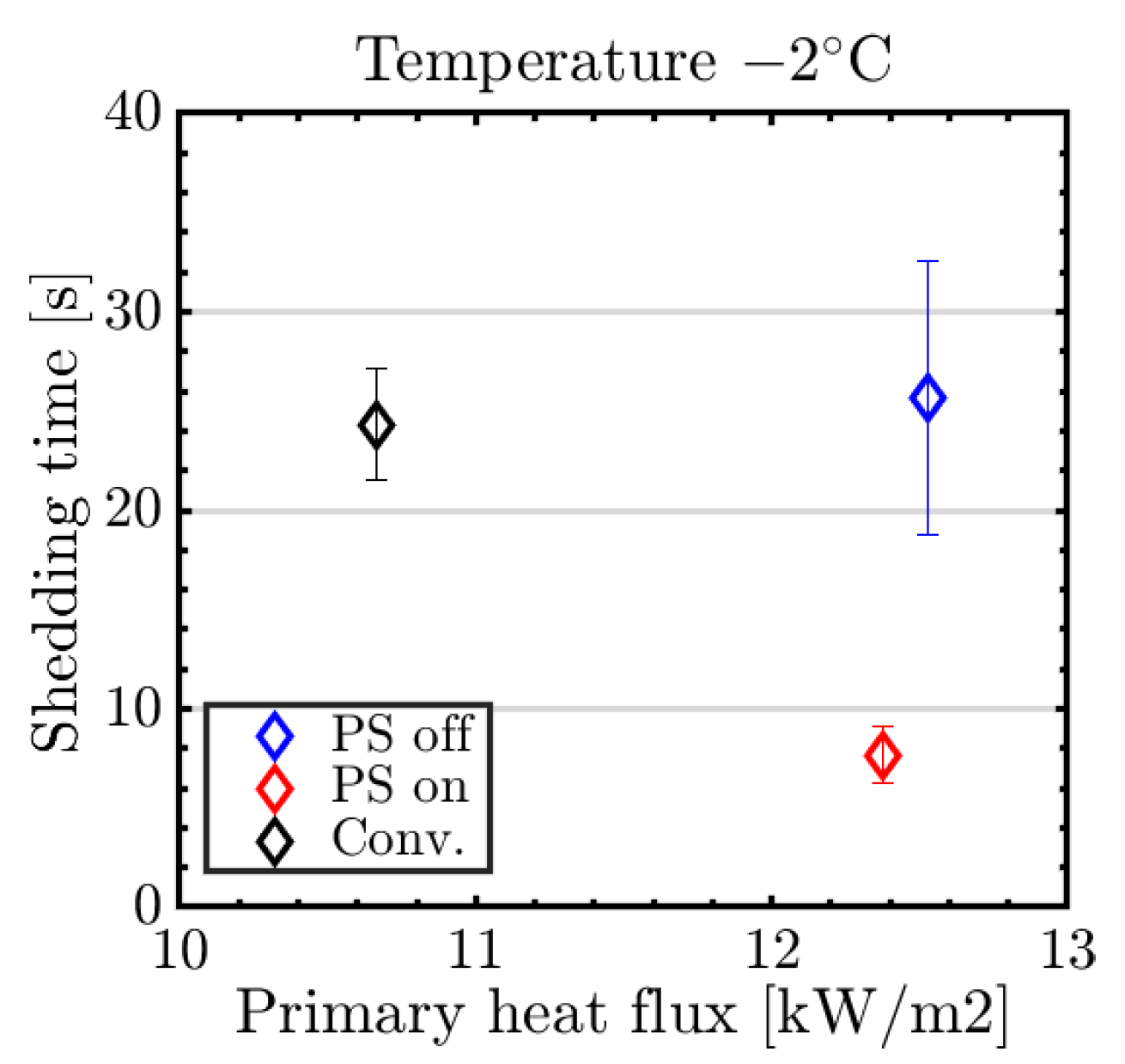
Figure 12. The first observation was that anti-icing required significantly more energy than all other cases. There was a strong temperature dependency on this effect, which implied that de-icing methods became more efficient compared to anti-icing for lower temperatures. The reason for this was that anti-icing systems need to continuously provide enough heat to compensate for the temperature difference between ambient and freezing point, whereas de-icing systems do this periodically.
The second conclusion was that parting strip de-icing was more energy-efficient than conventional de-icing, for any given intercycle time. The advantage of the parting strip was temperature-dependent, requiring approximately half of the energy compared to the conventional IPS for T = −2 °C and −5 °C. For the lowest temperature T = −10 °C, the advantage decreased. The reason for this was not clear. It could be related to the higher ice adhesion forces at a lower temperature or to insufficient heating of the parting strip and a too-small gap in the ice.
Third, a longer ice accretion time led to lower energy requirements for both conventional and parting strip IPS. The system was more efficient since the ratio of ice accretion time to active IPS time was larger, resulting in a larger denominator in .
Last, no clear trend could be observed for the influence of the level of the heat flux on the time-averaged energy consumption. It remains unclear if a high heat flux over a shorter time is more energy-efficient compared to a lower heat flux over a longer time. This was explained by the formulation of where the deicing heat flux is linked to the shedding time. Their inverse proportionality made them partly compensate for their behavior.
The outcome of this study strongly indicated that the most energy-efficient method of IPS is a parting strip de-icing system. However, there were several limitations to this study that should be noted. An assessment of IPS efficiency cannot be based solely on its energy consumption. Secondary effects, that add to the overall power consumption of the UAV need to be considered as well. This includes aerodynamic performance degradations by intercycle ice and runback icing. These ice forms introduce aerodynamic penalties by decreasing lift and increasing drag [
30,
31]. The UAV needs to compensate for these, by increasing thrust and AOA. This will require additional power consumption that needs to be considered for the overall assessment of IPS efficiency.
Runback icing occurred during both, anti-icing and de-icing, and can be observed in
Figure 7 and
Figure 8. In addition to the aerodynamic penalties, runback icing introduces the risk of freezing on downstream control surfaces. This can block their movement and is a severe risk for the UAV [
32]. Control of runback icing with an IPS can be achieved for example by multiple heating zones that are operated sequentially.
De-icing also introduces the risk of shed ice hitting critical components downstream. This is a risk for equipment like antennas, sensors, propellers, or engine inlets that are located downstream of protected surfaces [
13]. This risk is non-existent for anti-icing IPS and needs therefore careful evaluation for de-icing IPS.
There are several limitations to the experimental methods that add uncertainty to this study. First, the calculation of the heat fluxes was based on the electric power provided to the heating zones. In reality, only a part of this power is effectively used by the IPS. The largest loss occurs due to heat conduction into the wing. Furthermore, losses due to the electric system were not accounted for. We recommend that for future tests the actual heat flux generated by the heating panels should be measured. Second, the ice shedding times were observed manually. This added subjectivity to the test (based on the experimenter’s reaction time) and limited the accuracy of the time measurement.
Video data were collected during these tests, but to process this data takes substantial work. High-speed flow visualizations of the de-icing experiments were recorded at 60 and 120 frames per second from 3 viewpoints. The video-data results could highly increase the shedding time measurement accuracy and give more information about the ice shedding mechanism. Filmed in high-resolution, these visual observations show the liquid layer formation under the ice. This could give more information about the detachment mechanism and could be used for a qualitative runback ice investigation.
4.2. Measurement Uncertainties
As described in the methodology section, the uncertainty estimations of the imposed experimental conditions (temperature, wind speed, de-icing heat flux, etc.) were low, which ensured good test repeatability. For these parameters, the instrumentation precision was the predominant source of error, the errors increasing in significance for lower measurement values.
For measured quantities (anti-icing heat flux, ice thickness and ice shedding time) the estimated relative uncertainties were between 2 to 5 times higher than for the imposed test parameters. For these quantities, the measured values variation was the predominant source of error. This could have been caused by one or both of the following: decreased measurement precision due to human observation/reading of instrumentation or variations of the physical phenomenon between test repetitions, such as slightly different ice accretion shapes, ice cracking during de-icing tests etc.
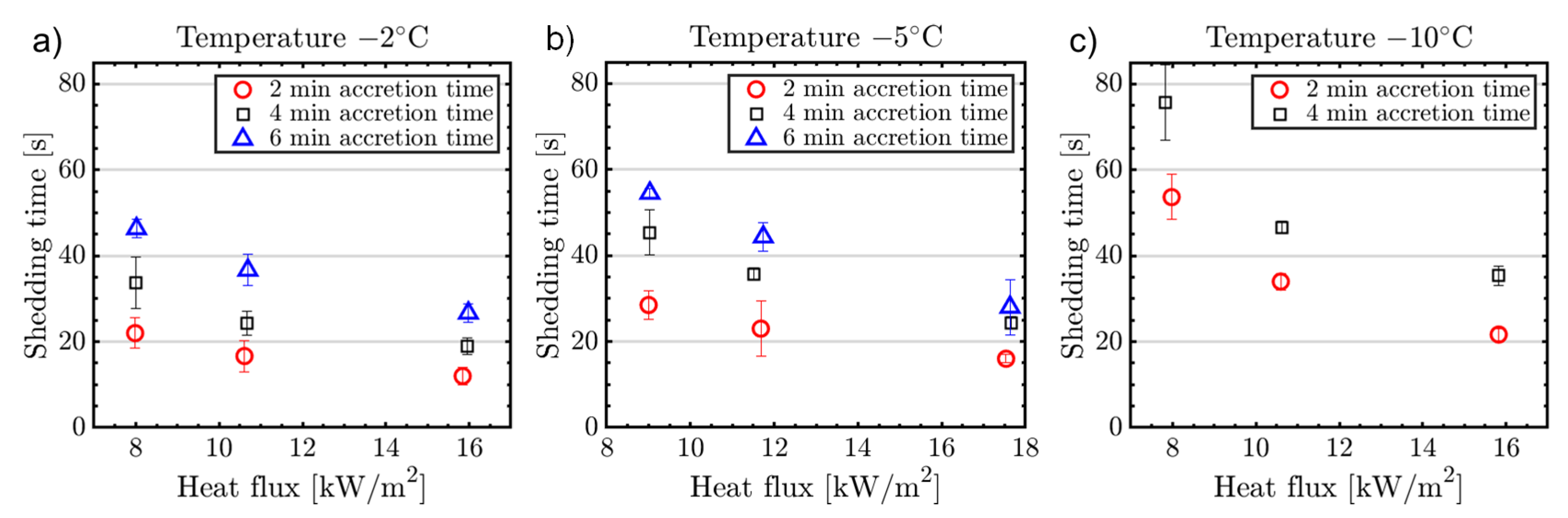
For measured quantities, it is generally observed that for smaller measured values the human reading error is more significant. For example, considering the conventional de-icing tests (
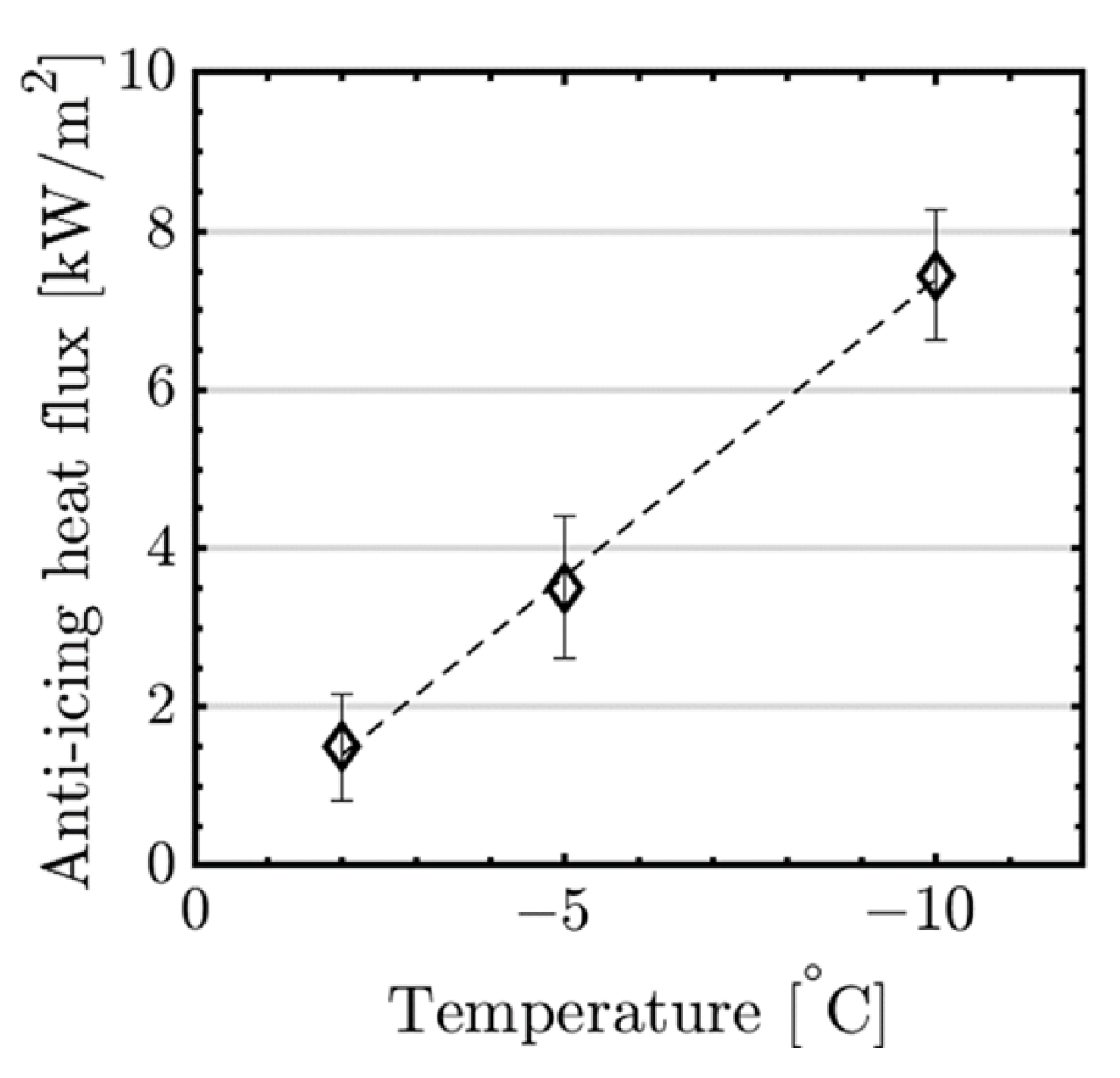
Figure 12), at temperature −5 °C and −10 °C the maximum absolute uncertainty is ~9 s, while the reported ice shedding times ranges differ from a maximum 45 s (at −5 °C) to 76 s (same test conditions at −10 °C). In the first case, the relative uncertainty is ~28%, while for the second it is only ~12%. Another example is the relative uncertainty variation in determining the anti-icing heat fluxes (
Figure 9). An absolute uncertainty of ~0.8 kW/m
2 represents ~10% of relative error for the 7.44 kW/m
2 measurement, but ~45% for the 1.5 kW/m
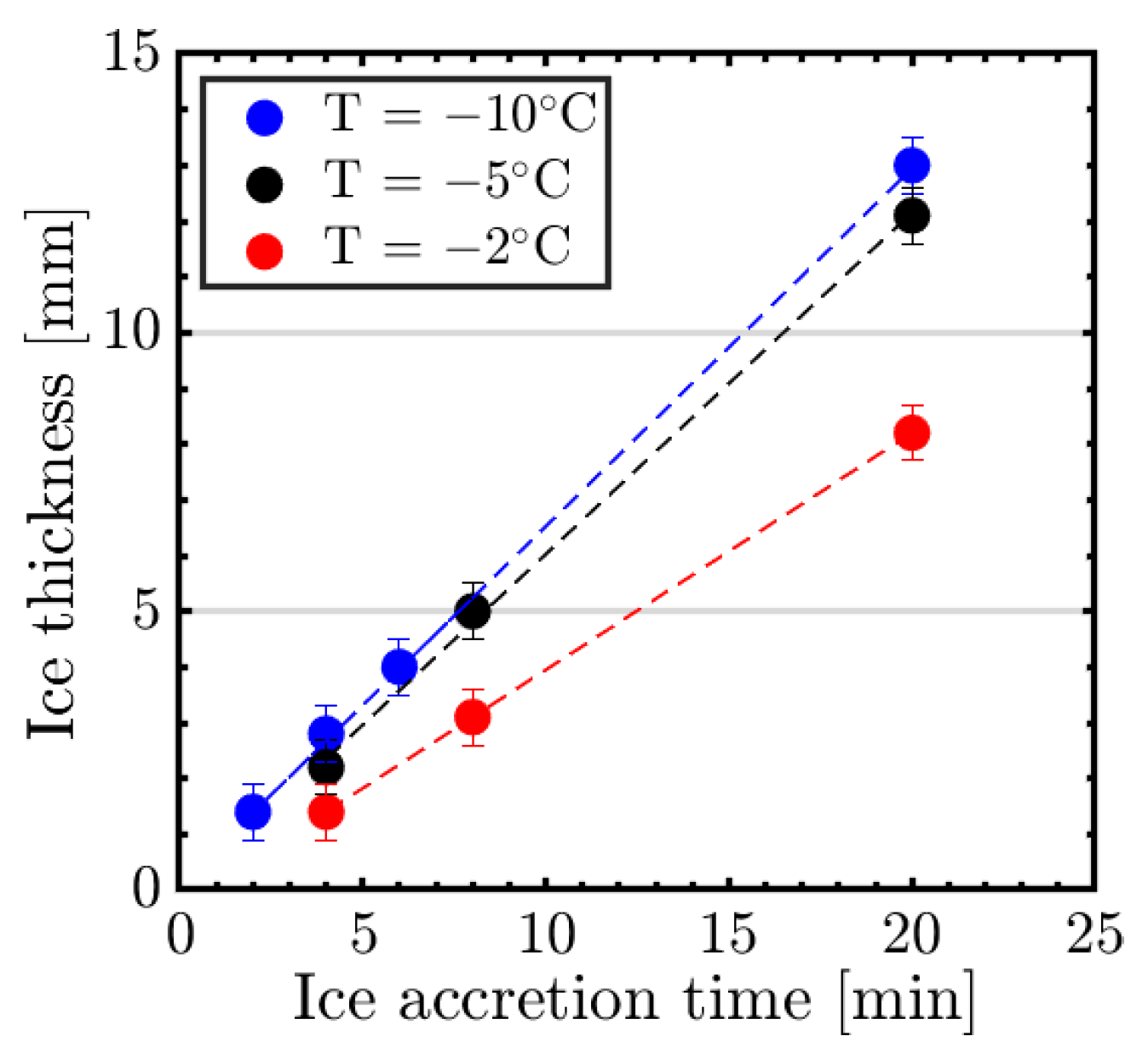
2 measurement. The same observation applies to the ice thickness measurements, where the absolute uncertainties are ~0.5 mm but the relative uncertainties vary between ~5 and 25%.
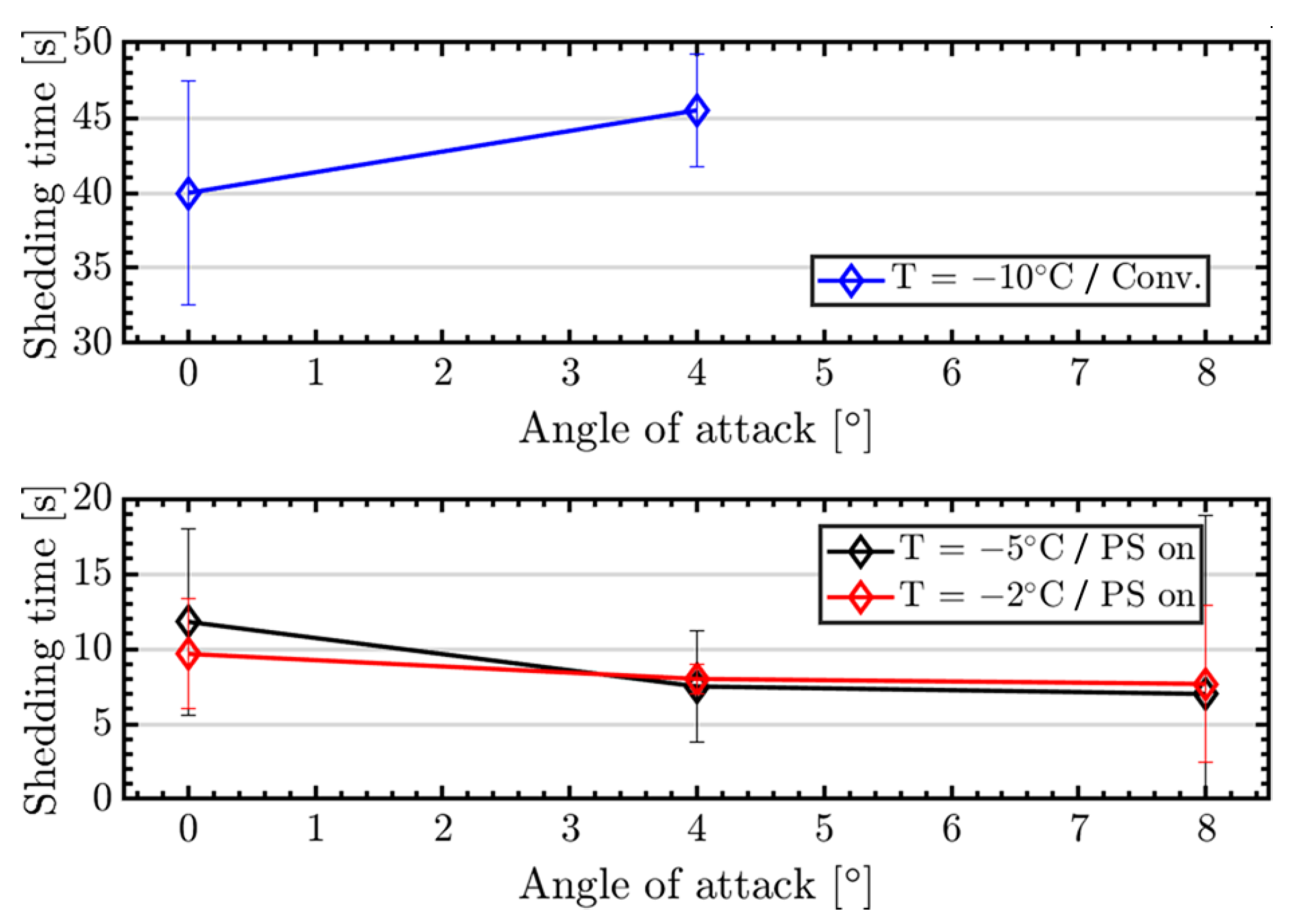
Regarding the de-icing tests, the most important uncertainty factor observed was the standard deviation of the test sample, compared to which the other sources of error were almost negligible. The spread of ice shedding times around the mean value was more pronounced at higher testing temperatures (higher standard deviations were observed at −2 °C temperatures than at −10 °C for both de-icing configurations). An explanation for this might be the formation of glaze ice, which has a higher shape variation between two repetitive runs, therefore it might induce an increased random variation between tests.
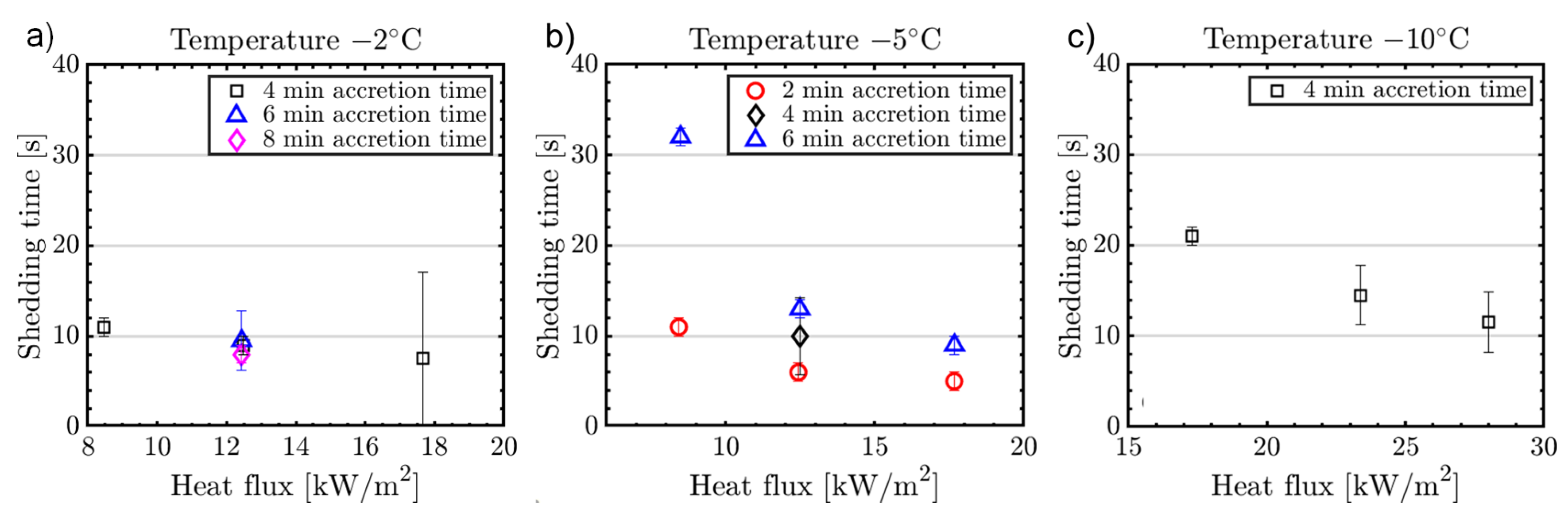
Another observation is that estimated uncertainties are significantly higher for the hybrid de-icing configuration (neglecting one extreme case, ~42% relative uncertainty, while for conventional de-icing the maximum reported was ~28%). This is partially due to the decreased absolute values in ice shedding time, but most of the uncertainty is due to the standard deviation of the samples. The variations between test repetitions might be related to the parting strip operation in anti-icing mode. This generates the existence of a water film on the airfoil’s surface, and a wetter ice accretion than the conventional configuration. Water presence might increase the ice shape’s variability and change the ice adhesion properties between two test repetitions. Although the measurements’ relative uncertainties are high in some cases, affecting the absolute values, the data aspect (generally non-overlapping of error margins between experimental conditions) allows for the observation of general trends. A few sensitive cases are the ice shedding time measurements of the hybrid configuration for −2 °C, at medium heat flux (
Figure 12). As the uncertainty margins overlap, little can be said about the differences between these tests. To improve measurement accuracy, one should increase the number of repetitions of a testing configuration. By doing so, the obtained mean would be closer to the true value, and the Student’s t-factor would reduce, therefore reducing the random uncertainty.
5. Conclusions
Atmospheric icing imposes limitations on UAVs that can be overcome with IPS. An electrothermal IPS was tested at the icing wind tunnel facilities of VTT. The main objective of this study was to identify which IPS method was the most energy-efficient and to investigate the effect of angle of attack and airspeed on de-icing. The results suggest that anti-icing was the least energy-efficient method of IPS. De-icing has proven to require substantially lower heat loads at all temperatures. A conventional IPS, with a periodically heated leading-edge, and a parting strip IPS, with a continuously heated small area, were tested for de-icing. De-icing with the parting strip has shown to require up to 50% less energy compared to a conventional de-icing system.
This study showed that the energy-efficiency of an IPS is determined by the IPS method chosen. An efficient IPS needs, therefore, to be carefully engineered and controlled. There are a large number of parameters that influence IPS efficiency, which need to be balanced and adjusted depending on the icing conditions. This experimental work offered additional insights into the interrelation of these parameters and can be used for comparison with numerical methods.
Under the assumption that the ice shedding mechanism for a de-icing case results from a force imbalance between the aerodynamical and viscous forces at the substrate surface—future work will be to couple these experiments with phase change and aerodynamical simulations, the latter validated against simplified force measurements. This would increase the understanding of the de-icing mechanisms and help to further improve the electrothermal IPS efficiency.


 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}