1. Introduction
Jupiter is the most massive planet in the solar system. It is also a gas giant planet. Its mass is 2.5 times the mass of other planets in the solar system. The large size of Jupiter also makes it relatively easy to be observed. As a result, it was discovered very early. Jupiter has been one of the major targets for planetary exploration. However, Jupiter’s powerful magnetosphere and radiation belts are threats to all human spacecraft trying to visit Jupiter. Since the 1970s, several space missions have been launched by NASA, such as Pioneer X, Voyager 1, Galileo, and Juno. However, there is still a long way to go to explore Jupiter. There exist many interesting phenomena that have attracted people to explore for many years, for example, the Great Red Spot, Jupiter’s rings, and atmospheric jet streams. As a gaseous planet, Jupiter cannot be explored by landing like a lithospheric planet. We can only use probes to orbit and enter Jupiter’s atmosphere. Therefore, it is necessary to investigate the orbit dynamics around Jupiter. Weibel et al. [
1] researched stable orbits between Jupiter and the Sun. Jacobson [
2] investigated the gravity field of Jupiter and the orbits of its Galilean satellites. Colwell et al. [
3] studied the exogenic dust ring. Recently, Liu et al. [
4,
5] discussed the dust in the Jupiter system outside the rings and distribution of Jovian dust ejected from the Galilean satellites. Research about this will surely contribute to the orbit design of space missions.
Investigating the dynamical environments around planets has been the focus for space missions in the past few decades. For this purpose, much research concerning various special artificial satellite orbits around planets have been conducted. Usually, these special types of orbits include stationary orbits, frozen orbits, sun-synchronous orbits, repeating ground-track orbits, and orbits at the critical inclination. The original idea about geostationary orbits was first put up by Clarke [
6]. He pointed out that satellites with an altitude of 36,000 km above the equator of the Earth would have the same rotation rates as the Earth and stay stationary relative to an observer on the equator. Therefore, geostationary satellites are often used for the sake of communications and navigations. Four equilibrium solutions for geostationary orbits were shown to exist by Musen & Bailie [
7]. Moreover, two of them were stable while the other two were unstable. Lara & Elipe [
8] calculated periodic orbits around equilibrium points in the Earth second degree and order gravity field. For Mars, the stationary orbits, also known as areostationary orbits, and the equilibrium points were studied by Liu et al. [
9]. The periodic orbits around the equilibrium points were also calculated by Liu et al. [
10].
For orbits at the critical inclination, the eccentricity and argument of perigee are invariant on average. The concept of the Earth critical inclination was first introduced by Orlov [
11]. Brouwer [
12] used canonical transformations to eliminate short-period terms. Coffey et al. gave a geometrical interpretation of the critical inclination for satellites by investigating the averaged Hamilton system [
8]. Representatives of orbits at the critical inclination are the Russian Molniya satellites. The combined effects of the critical inclination and the 2:1 mean motion resonance of a Molniya orbit have been intensively studied since then, for example, in [
13,
14,
15,
16,
17]. Similarly, frozen orbits are characterized by the invariance of average eccentricity and argument of perigee. Frozen orbits are not limited to specific inclinations. They may exist at any inclination. Usually, the argument of perigee is equal to 90 or 270 deg, depending on the sign of the ratio of the harmonic coefficients
and
. Frozen orbits were first proposed by Cutting et al. [
18] for orbit analysis of the Earth satellite SEASAT-A. Coffey et al. [
19] showed that there exist three families of frozen orbits in the averaged zonal problem up to
in the gravity field of an Earth-like planet. The frozen orbits around the moon in the full gravity model were considered by Folta & Quinn [
20], and Nie & Gurfil [
21]. Some researchers also view orbits at the critical inclination as frozen orbits, for example [
19,
22].
Sun-synchronous orbits are defined with a precession rate of the orbital plane equal to the revolution angular velocity around the sun. Generally, remote sensing satellites are placed into these orbits. Macdonald et al. [
23] used an undefined, non-orientation-constrained, low-thrust propulsion system to consider an extension of the sun-synchronous orbits.
For repeating ground track orbits, the trajectory ground track repeats after a whole number of revolutions within some days. Orbits of this type are widely used to achieve better coverage properties. Lara showed that orbits repeating their ground track on the surface of the Earth were members of periodic-orbit families of the tesseral problem of the Earth artificial satellite [
24].
Lei [
25] considered the leading terms of the Earth’s oblateness and the luni-solar gravitational perturbations to describe the secular dynamics of navigation satellites moving in the medium Earth orbit and geosynchronous orbit regions. Liu et al. [
9] calculated these five types of special orbits around Mars with analytical formulations and numerical simulations. In fact, the gravity field of Mars shares many similarities with that of the Earth. The
terms of them are dominant among the harmonic coefficients. However, the
term is not as dominant as Earth’s
. The other first few harmonic coefficients are also strong for Mars: about 1–2 orders of magnitude smaller than
; for the Earth, the other first few harmonic coefficients are about 3–4 orders of magnitude smaller than
.
The situation is rather different for Jupiter compared with the Earth and Mars. Due to the difficulty of determining the gravity field of Jupiter, there exist few studies about special types of orbits around Jupiter, as far as we know. However, the situation has greatly improved since Juno’s gravitational measurements were conducted. Iess et al. [
26] provided measurements of Jupiter’s gravity harmonics (both even and odd) through precise Doppler tracking of the Juno spacecraft. Moreover, they pointed out a North-South asymmetry, which is a signature of atmospheric and interior flows. Here, we mainly use the results in [
26] to build a simplified gravity model of Jupiter. Some harmonic coefficients of the gravity model of the Earth, Mars, and Jupiter can be seen in
Table 1.
In this paper, we investigate some special orbits around Jupiter, considering mainly the effect of the non-spherical perturbation of the gravity field.
From
Table 1, one can see that the
J2 term is still dominating,
J2 is about 25 times the value of
, but is
times bigger than
. The terms, such as
(the values and their uncertainty can be seen in [
26]), can be neglected compared with the terms of
and
. Therefore, a good approximation of the gravity model of Jupiter is given by
where
is the gravitational constant of Jupiter,
,
is the mass of Jupiter,
is the radius of Jupiter,
is the distance of the satellite relative to the center of mass of Jupiter,
is the latitude of the satellite. Equation (1) indicates that the gravity model of Jupiter that we use here is symmetrical with respect to the z-axis. This leads to different characteristics of satellites orbiting around Jupiter and the Earth or Mars. In the next sections, we adopt the gravity model represented by Equation (1) and use it to study some mean features of orbits around Jupiter.
2. Stationary Orbits
Satellites on stationary orbits are well-known for their stationary ground track. Therefore, stationary orbits are preferred for designing communications and navigation satellites. There exist numerous studies on stationary orbits of the Earth and Mars. However, the gravity field of Jupiter is significantly different. In this subsection, we will calculate the stationary orbit of Jupiter and investigate their stability in a spherical coordinate system.
In the spherical coordinates of an inertial frame,
, where
is the center of mass of Jupiter,
λ is the jovicentric longitude,
r and
are the same as those in Equation (11), and the kinetic energy of the spacecraft can be written as
where
are the derivatives with respect to time. From the expressions of
T and
, one can see that
is a cyclic variable. Let us introduce
, the Lagrangian can be written as
. By Lagrange equations, we have
More precisely, the equations of motion can be presented as follows:
From the second equation of (4), we see that the quantity
is invariant, which can also be obtained by conservation of the angular momentum along the z-axis. Moreover, the zonal terms of the gravity field only lead to radial and North-South perturbations. The presence of these terms increases the radius of the stationary orbit with respect to the case of a spherical planet with the same mass of Jupiter. When the orbital plane coincides with the equatorial plane, namely
, the vertical perturbation vanishes. In order to find stationary orbits for Jupiter, let
in these equations; we get
or
where
is the rotational angular velocity of Jupiter. One can verify that the left-hand side of the second equation in (6) is always positive when
is larger than
. Therefore, we only need to analyze solutions of Equation (5). From the second equation of (5), we see that only one meaningful latitude of the stationary orbit exists, i.e.,
(
are also roots of
, but
makes no sense for stationary orbits, and
corresponds to a stationary orbit which coincides with that of
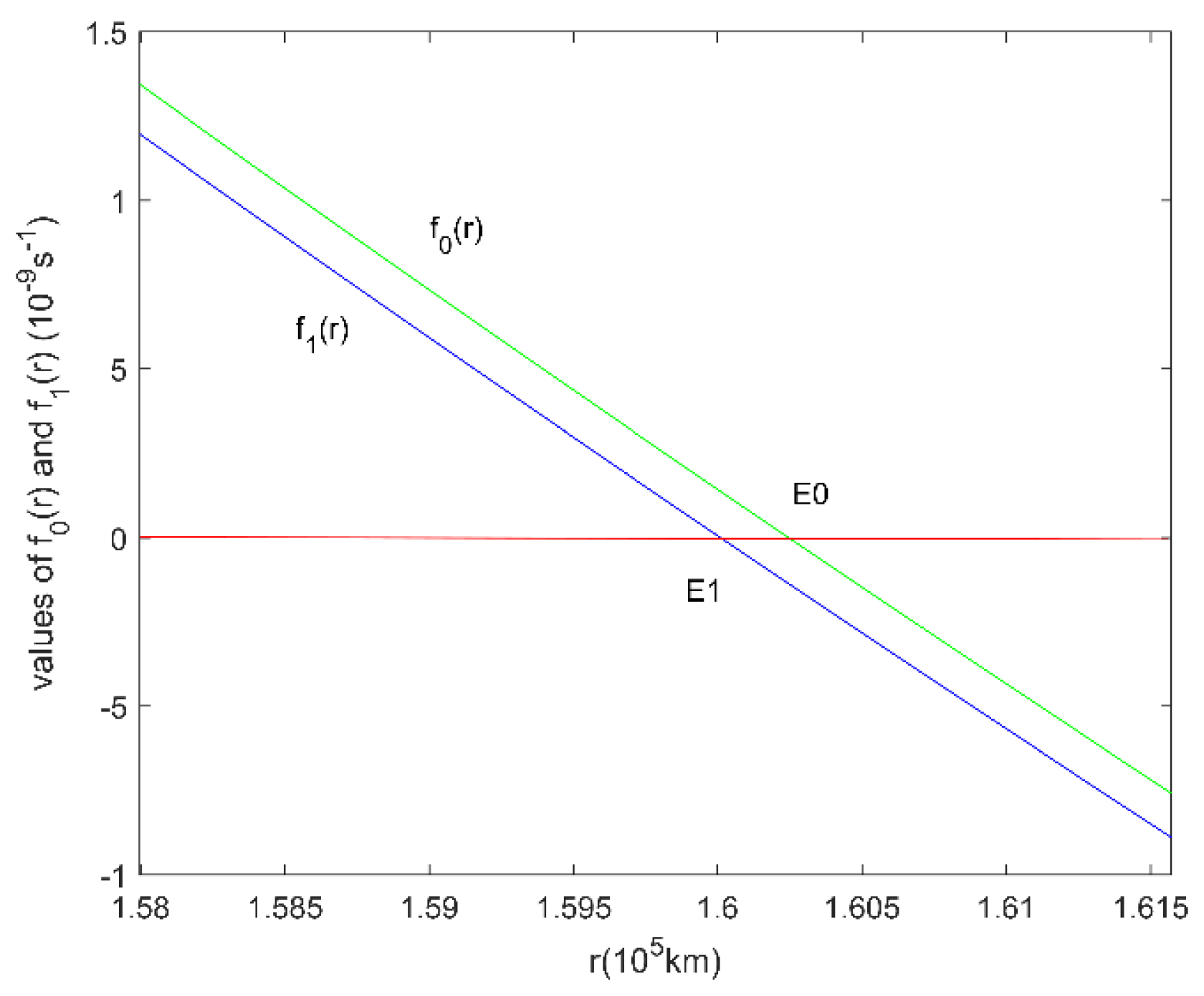
). Introducing the functions
and
, the variations of
, with respect to
, can be seen in the following
Figure 1.
It can be proved that
vanishes at two real positive values of
, but only one of them is bigger than
. This solution, which is given by
, is denoted by E0 in
Figure 1. If the perturbation due to the non-spherical gravity field is not considered, one can find that the radius for stationary orbits is about
, which corresponds to the point E1. Therefore, the existence of the
and
terms increase the altitude of the stationary orbit.
To study the stability of the stationary orbits under small perturbations, we mainly used the epicyclic theory (Murray & Dermott [
29]). We can denote by the constant
, the value taken by
for some given initial conditions. Assuming that the deviations from the stationary orbits are small and writing
, Equation (4) can be linearized as follows (Murray & Dermott [
29], Section 11 of Chapter 6):
where
,
,
, and
. By solving Equation (7), the analytical approximate expressions of
can be formulated as [
29]
where
,
,
is the inclination, and
is the eccentricity of the orbit. Note that the average of
is
. Let us set
The first two equations in (7) or (8) show that the radial and North-South motions are uncoupled. Using the expression (1), we can get a precise form of the three frequencies
[
29]:
Therefore, the satellites will oscillate in the radial and North-South directions with frequencies and , respectively. Moreover, the mean motion frequency, , in the West-East direction is larger than in the Keplerian case. Namely, for a given semi-major axis, the satellite moves faster than the rate expected at that location in the Keplerian case. In the following, we give some numerical examples to illustrate the above characteristics.
We computed the evolution of
,
, and
when we selected initial values of
and
close to
r0 and 0, respectively.
Figure 2 shows a stationary orbit and four orbits obtained from
deg and
deg. We can see that these four disturbed orbits are no longer periodic. This can be explained by using Equation (9). Due to the presence of the terms that contain
and
, the three frequencies are usually not equal or even commensurable.
Figure 3 illustrates that the satellite oscillates in the radial and North-South directions. On the other hand, the satellite on stationary orbits does not drift in these directions. It only moves with a constant
along the orbit. Therefore, the drift of longitude would not occur for satellites on stationary orbits since only zonal harmonics are taken into account in the gravity model. Furthermore, there are no significant differences between points on the stationary orbit. As a result of the symmetry of the gravity field, it can be concluded that the points on stationary orbits are degenerate equilibrium points. Here, an equilibrium point is degenerate if, and only if, the matrix of the linearized equation for (4) is degenerate. This is the major difference with respect to stationary orbits of other planets, such as the Earth and Mars. For the Earth and Mars, there exist four equilibrium points on stationary orbits, among which two are stable and the other two are unstable.
In the following, we show that the effects of third bodies, the Jovian ring and the magnetic field of Jupiter, are negligible compared to those of the and terms.
Based on the data of the Sun and moons around Jupiter (see for example, [
30]), one can calculate the maximal ratio of the disturbed acceleration (
) and central gravity acceleration (
) for satellites on stationary orbits, which is achieved when the satellite, Jupiter, and the third body are in a straight line. Therefore, the maximal ratio can be calculated as [
31]
where
is the mass of the third body, and
is the distance between Jupiter and the third body. Values of the maximum ratio (109) for different bodies are reported in
Table 2. Since the
term of Jupiter is 100 times bigger than the ratio of acceleration for Io (which gives the highest value among the Galilean satellites), it is reasonable to ignore these effects when investigating the qualitive character of stationary orbits on short time scales. To verify the validity of these solutions, we use the numerical integration method to see the effect of the Galilean moon Io in 800 Jovian days. The orbital elements
of Io that we adopt here are taken from the 10th China Trajectory Optimization Competition, i.e.,
Calculation results show that the drift of longitude (
) for the satellite on stationary orbits is less than 0.1 deg in 800 Jovian days. The inclination changes no more than
deg. The oscillation of the semi-major axis is less than 0.13% of the obital radius. However, it should be noted that the obtained solutions may not be correct on long time scales.
The Jovian main ring is about 6440 km wide and probably less than 30 km thick. We denote this width by
. Moreover, the distance,
, of the ring from the center of mass of Jupiter is about 122,500 km, and the mass,
, is about 1.0×10
13 kg [
32].
For satellites on stationary orbits with position
, the gravitational acceleration due to the Jovian main ring can be calculated as
where
denote the position vector and the density, respectively, which depend on the position of a point,
, belonging to the ring. We can see that
Note that , which is far smaller than and terms. Therefore, the effects of the Jovian main ring on stationary orbits can be neglected.
Another perturbation that may affect stationary orbits is the magnetic field of Jupiter when the satellite is charged. Here, we briefly analyze the effects under some assumptions. The magnetic field of Jupiter near stationary orbits when exterior terms are neglected can be written as
where
Here,
and
are the geomagnetic Gauss coefficients (their values can be found in [
33,
34]), and
is the normalized Legendre function. The acceleration due to the Lorentz force is
where
,
is the vacuum permittivity,
is the surface potential of satellites,
is the radius of the satellite,
is the angular velocity vector of Jupiter. For a charged satellite with
(an in-depth study of the effect of spacecraft charging at Jupiter can be found in [
35]),
, and
m = 100 kg, we have
and
. The Lorentz force compared with the lowest order of gravity provides the ratio
This ratio is also far smaller than and J4. Therefore, it can be concluded that the effects of Lorentz forces on a satellite can be neglected.
3. Sun-Synchronous Orbits
The oblate nature of the primary body can lead to a secular variation of the ascending node of the orbit. However, we can use the orbit perturbations to keep the orientation of the Sun line direction fixed with respect to the orbital plane (for example, perpendicular to it) during one revolution of Jupiter around the Sun.
Based on the mean element theory, the mean nodal precession rate coming from the secular perturbations of the first and second order [
36,
37] can be described as
For sun-synchronous orbits, the mean nodal precession rate is equal to the mean motion of Jupiter orbiting around the Sun (
). Thus, we get the following equation:
where
Here, we remark that in Equations (17) and (18), is equal to a(1−e2).
First, setting
, we note that the equation
has three real roots if the discriminant satisfies the following inequality:
Then, it is also necessary to avoid impact with Jupiter. However, the surface of Jupiter cannot be unambiguously defined since it is a gas giant. The critical perijovian distance,
, is usually much larger than the radius of Jupiter,
, due to radiation safety issues. However, let us take for convenience
, so that the semi-major axis and eccentricity have to satisfy
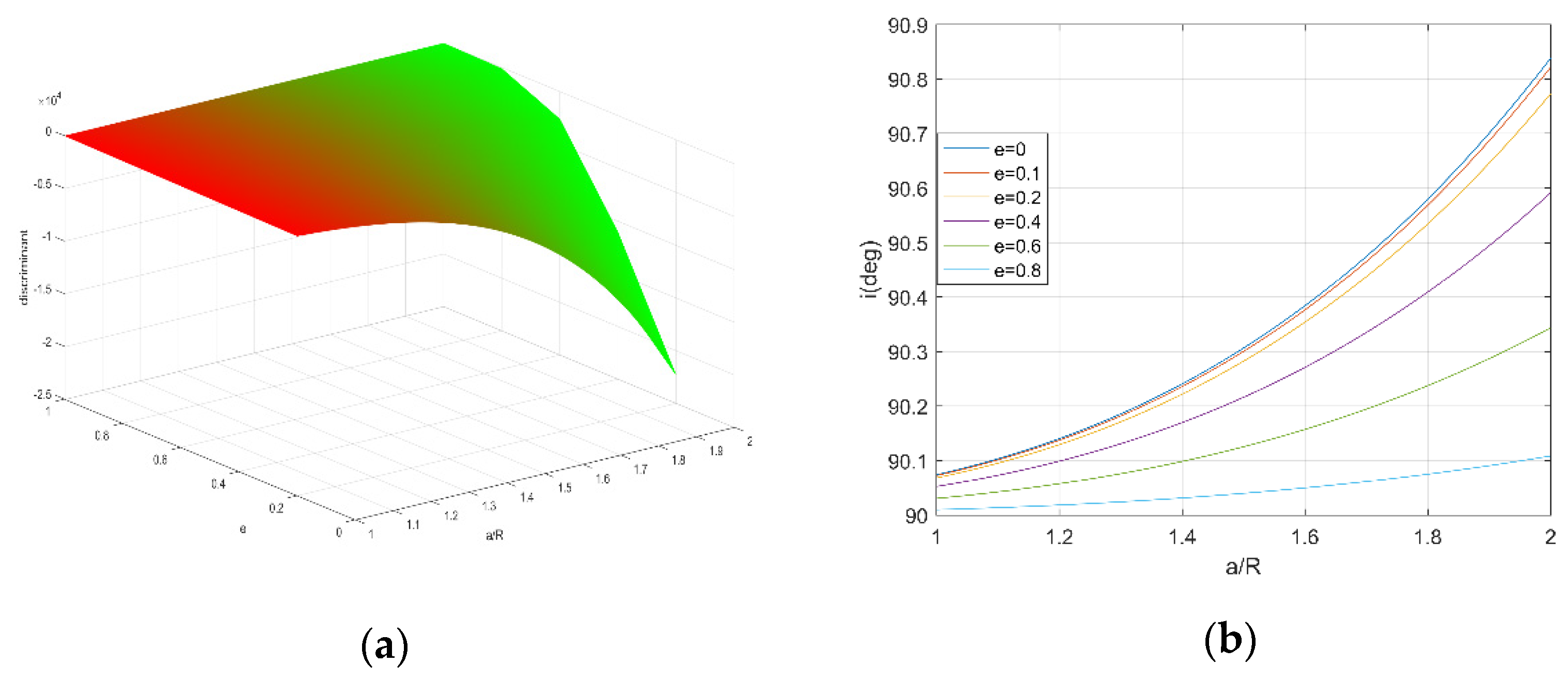
The variation of the discriminant with respect to
and
e is shown in
Figure 4a. We see that the discriminants are always negative for
and
, therefore, it can be concluded that there usually exists one meaningful inclination for sun-synchronous orbits when the semi-major axis and eccentricity are given. The inclinations for different semi-major axis and eccentricities are shown in
Figure 4b. It was shown that the inclination monotonically increases with respect to the semi-major axis. For the same semi-major axis, the inclination decreases as the eccentricity increases. Moreover, the inclinations with the same altitude ratio,
, are relatively smaller than those of near-Earth sun-synchronous orbits.
For satellites on sun-synchronous orbits with medium altitude, perturbations from the gravity of the third body are usually smaller compared to satellites on stationary orbits. However, the risk coming from the Jupiter rings and the magnetic field may increase greatly.
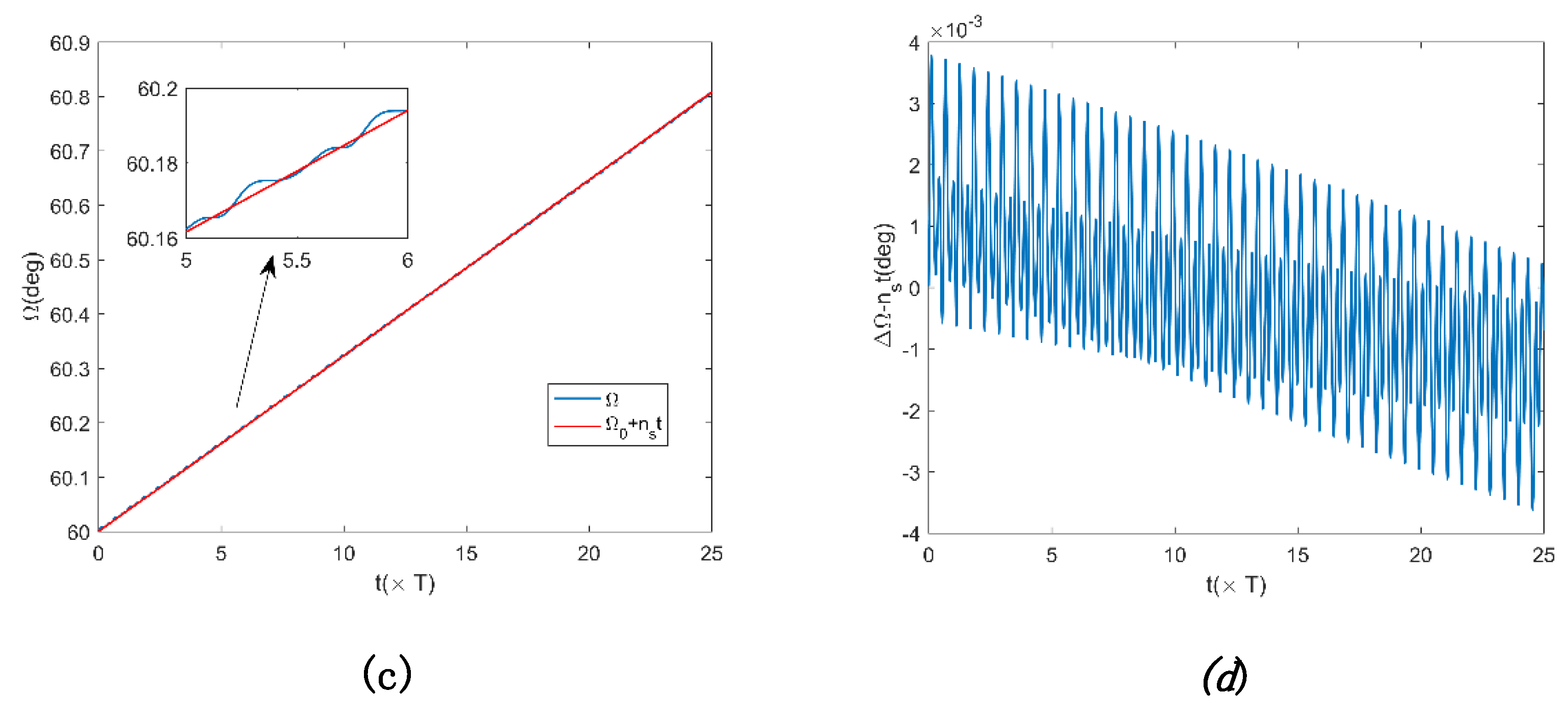
For sun-synchronous orbits, when
km and
, we have
deg; when
km and
, the corresponding inclination is 90.321 deg. The evolution of
and of the difference between
and
over 25
T for these two cases are presented in
Figure 5. In the first case, this difference is about 0.018 deg; and in the second case, it is about 0.008 deg.
4. Orbits with Critical Inclination
The variations of the eccentricity and the argument of perijove are mainly caused by the equatorial bulge of Jupiter. These usually produce negative effects on space missions to Jupiter. However, we can choose orbits with critical inclinations to avoid these disadvantages.
According to the mean element theory, the mean variation rate of
caused by perturbations of the first and second order [
36,
37] can be formulated as follows:
To keep the invariance of the mean argument of perijove, we set
Therefore, we obtain the following equation
where
Note that the left hand side of Equation (23) is a second-degree polynomial with respect to
. This polynomial in
may have two real roots in [0,1], and so we may have up to four values of the inclination in
that solve Equation (23). Let us set
and write Equation (23) as
Noting that
, we find that
can have up to two real roots. Moreover, if
, they will fall in the interval [0,1]. If there exist four roots in
of the critical inclination, then Equation (27) must have two different real roots lying in [0,1]. Observing that
, we can easily see a necessary condition for Equation (27) to have two different roots lying in [0, 1] is
Moreover, the condition (21) should also be satisfied to avoid the impact with Jupiter. The variation of
for
and
are presented in
Figure 6a. We note that
in this domain of
, therefore, there exist two critical inclinations, and one of them corresponds to a retrograde orbit. The variation of critical inclinations of direct orbits as
increases from
to
are presented in
Figure 6b for different values of the eccentricity. We can see that when
is small, for example
, the critical inclination monotonically decreases with respect to the altitude of the orbit. On the other hand, when
, the critical inclination monotonically increases. It can also be concluded that there exist some critical values for e, such that the critical inclination is independent of the altitude of the orbits.
Figure 6b shows that in the case of Jupiter, critical inclinations depend on the semi-major axis and eccentricity, while for the Earth considering only the
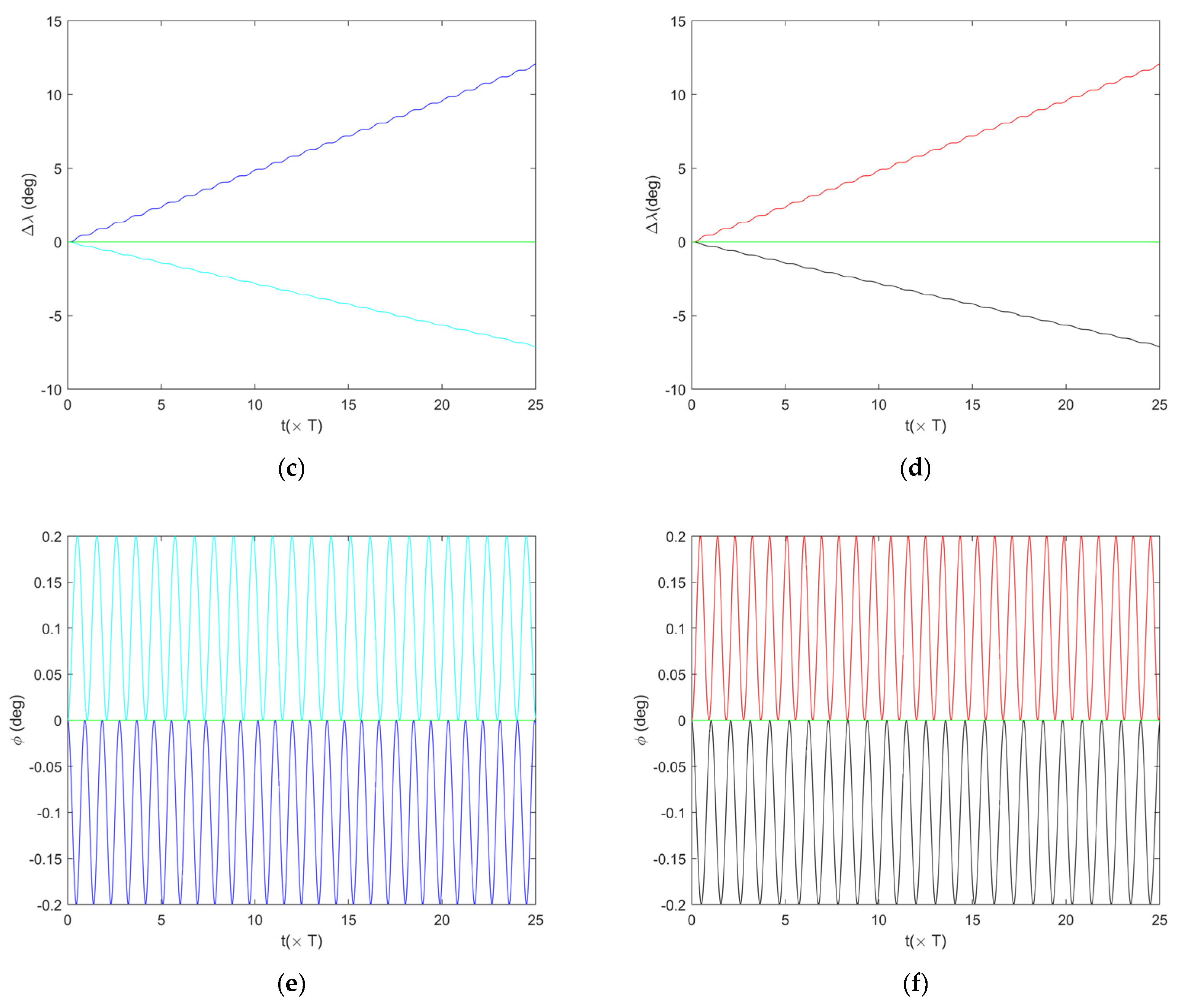
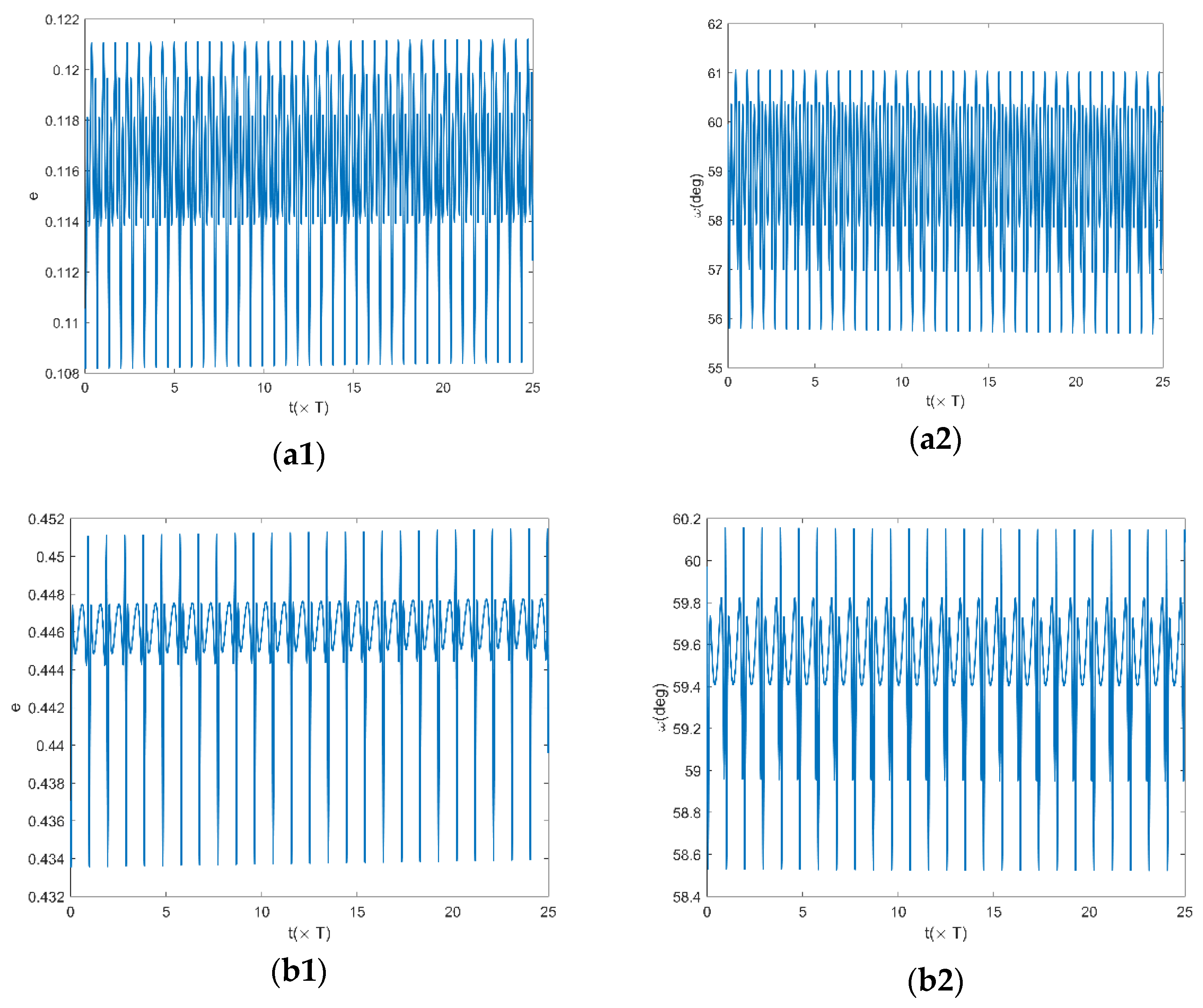
, they are fixed (63.435 deg and 116.565 deg). The evolution of
ω and
for two different values of the semi-major axis and eccentricity are shown in
Figure 7 and
Figure 8.
For the first case in
Figure 7, the amplitude of
is about 5 deg over a time of
. The amplitude of
is about 0.013. For the second case, the amplitude of
is about 1.8 deg over the same time. One can also see from
Figure 8 that the amplitude of
in the first case is much larger. This is reasonable, since the semi-major axis of the second case is larger than that of the first case.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}