
Water Recognition on the Moon by Using THz Heterodyne-Spectrometer for Identifying the Appropriate Locations to Extract Water for Providing Oxygen for Breathing and Fuel for Spaceships’ Propulsion on the Moon with CubeSat



Abstract
:1. Introduction
2. Mission Objective
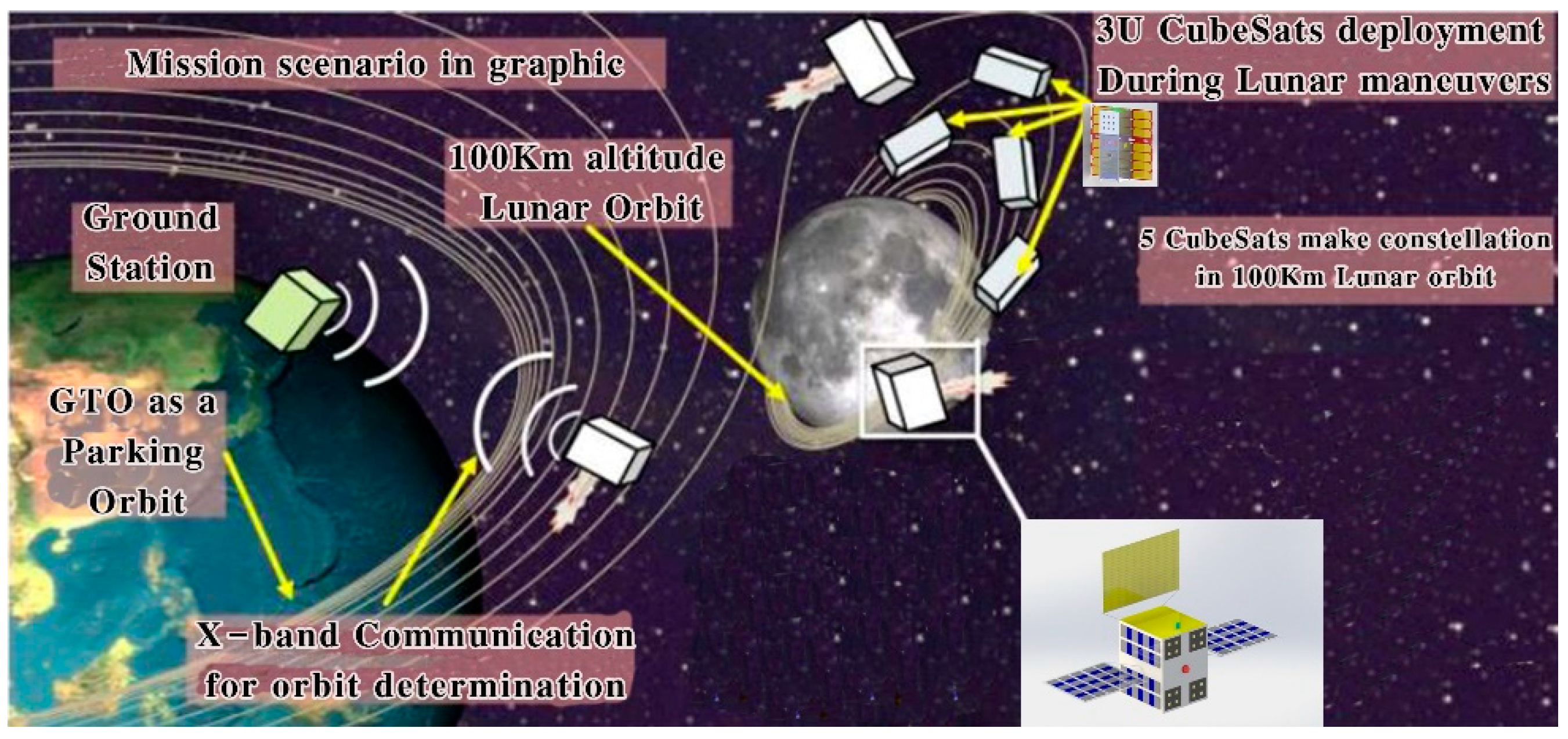
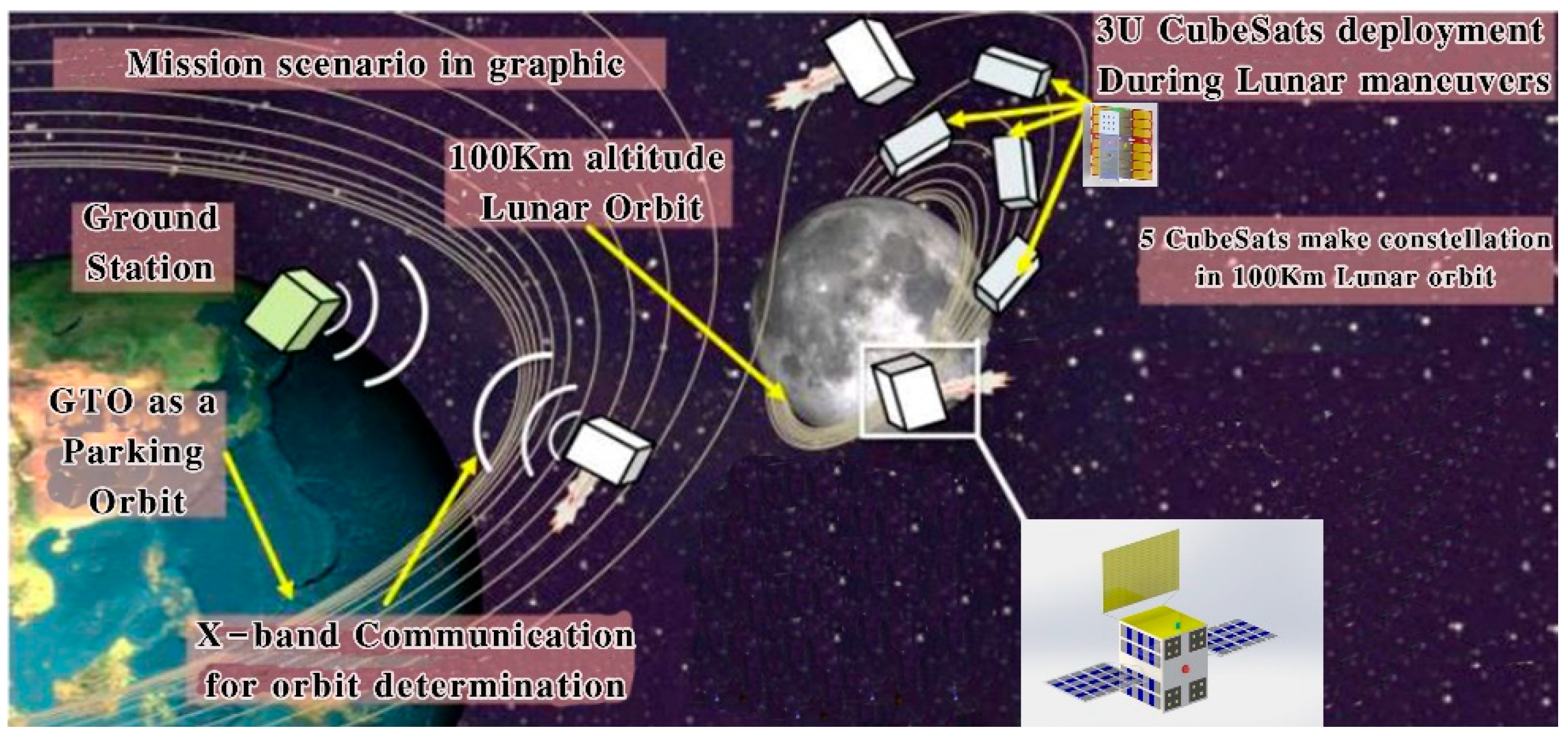
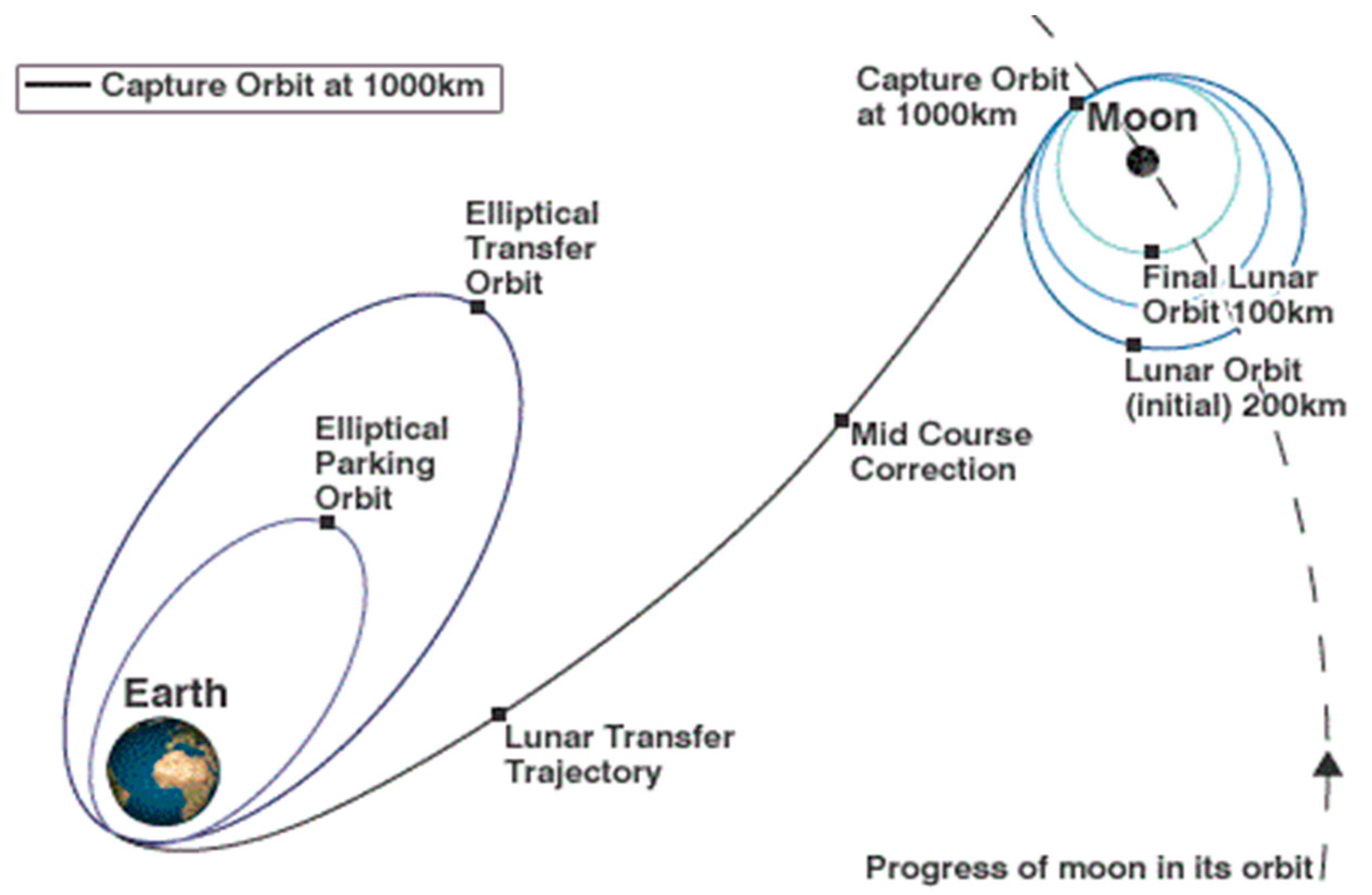
3. Lunar Orbit CubeSat Injector Scenario
- Thrust near Geostationary Transfer Orbit (GTO)perigee to increase Geostationary Orbit (GEO) orbit radius altitude.
- Thrust near apogee to increase the radius of GTO perigee to ensure lunar orbit transferring.
- Thrust and spiral to capture a lunar orbit.
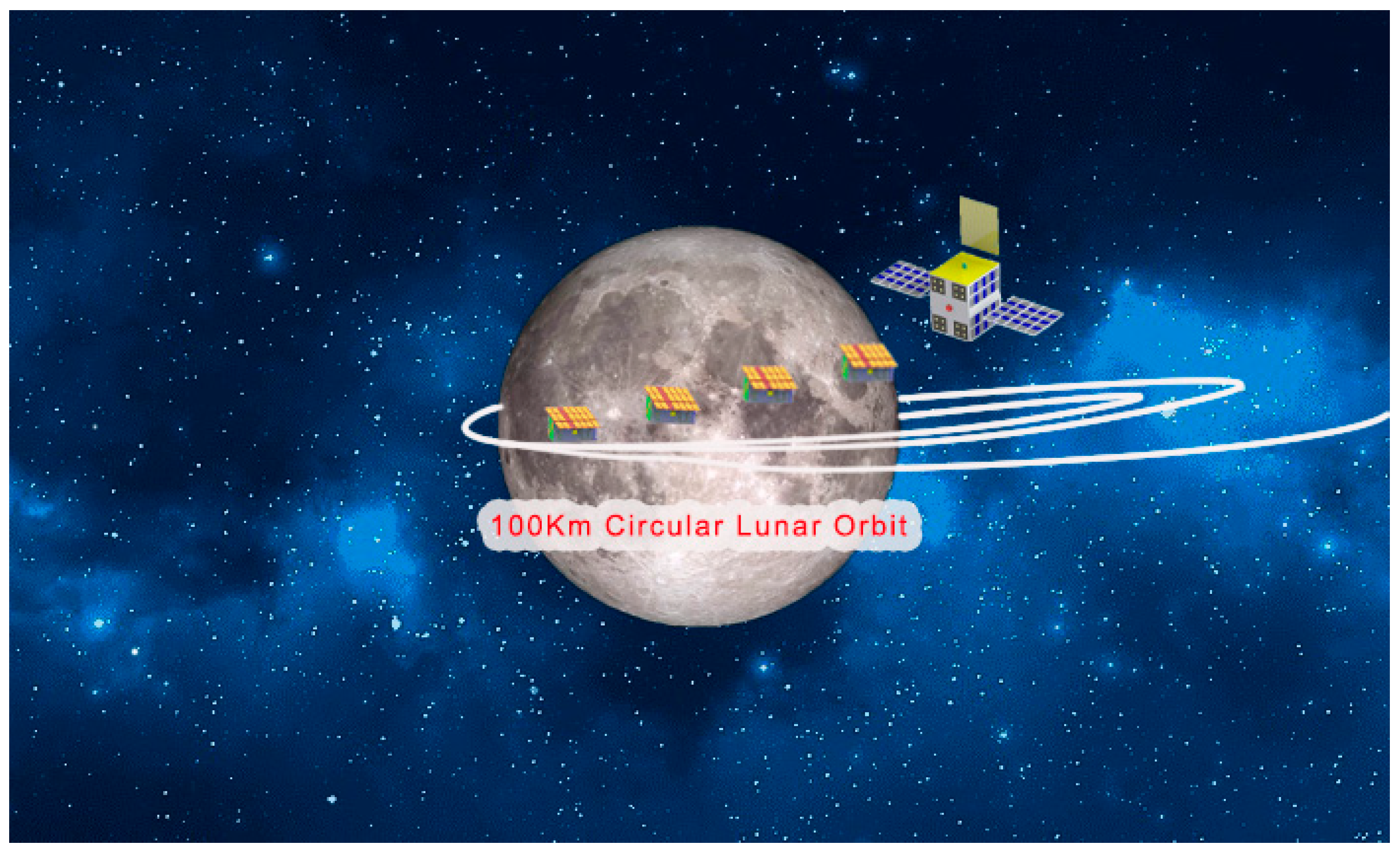
- Thrust to enter 100 km altitude circular lunar orbit.
4. System-Level Design
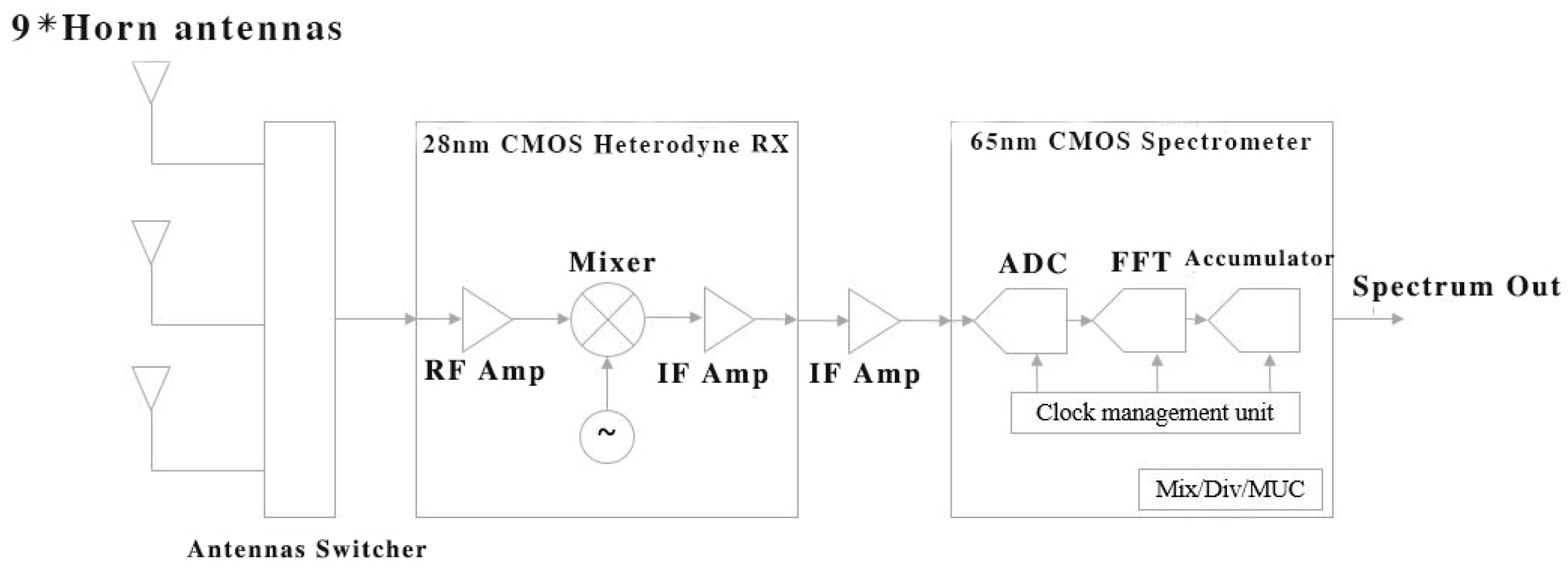
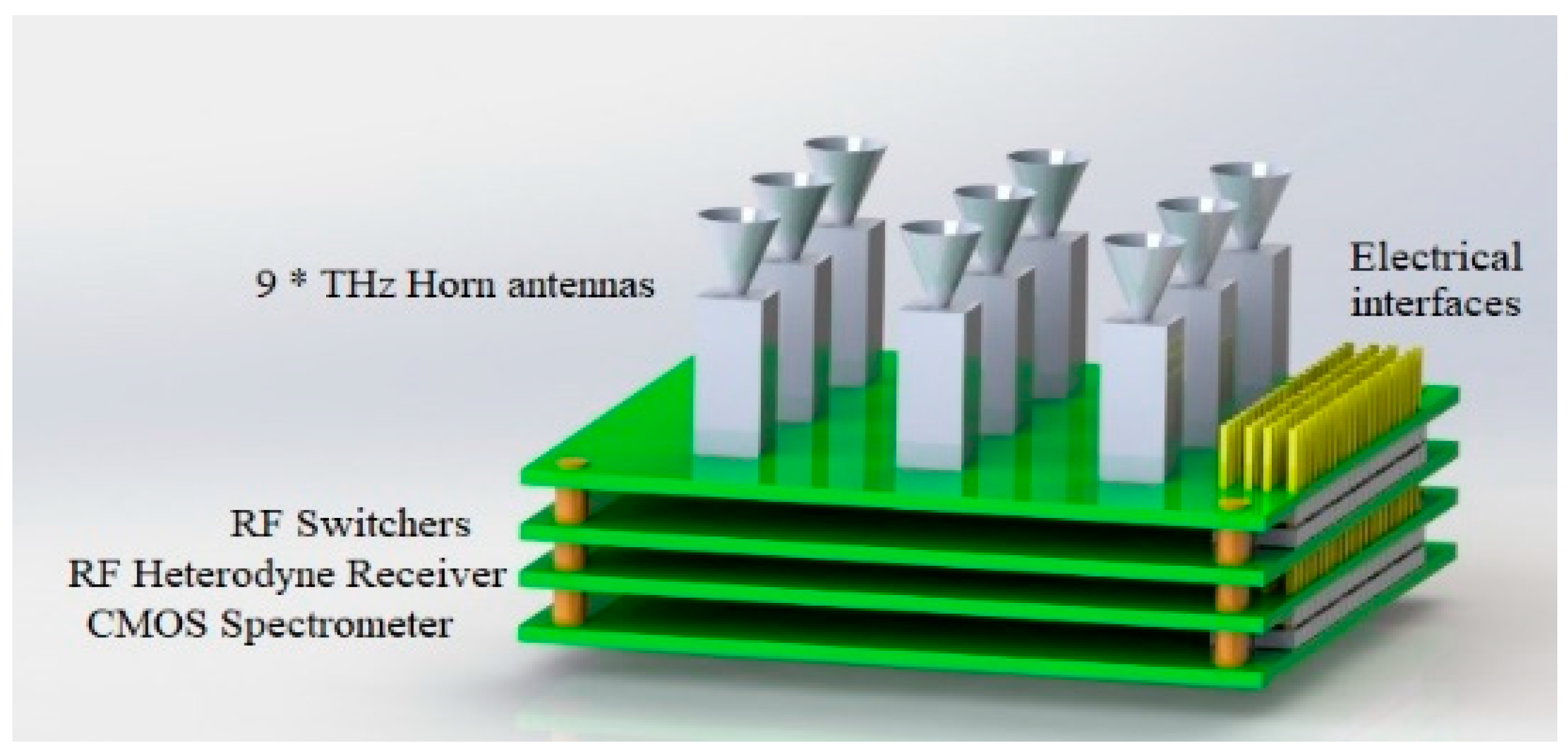
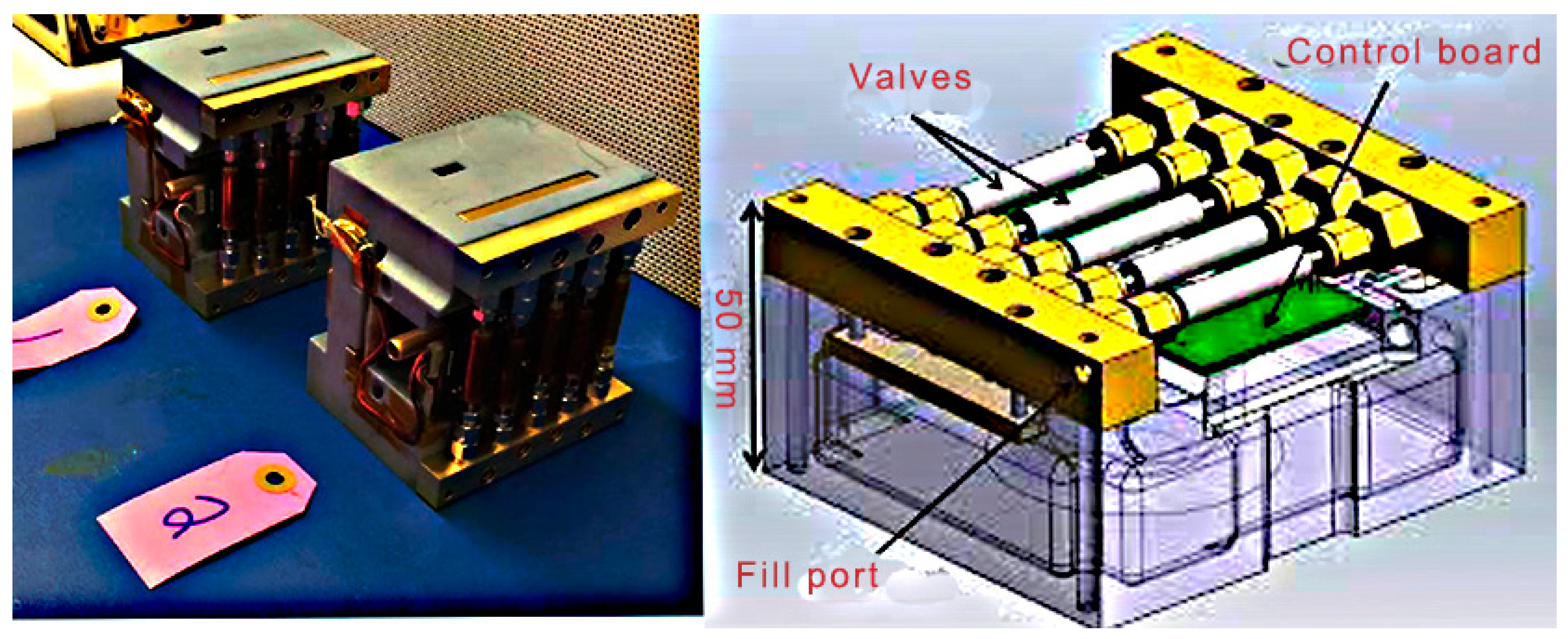
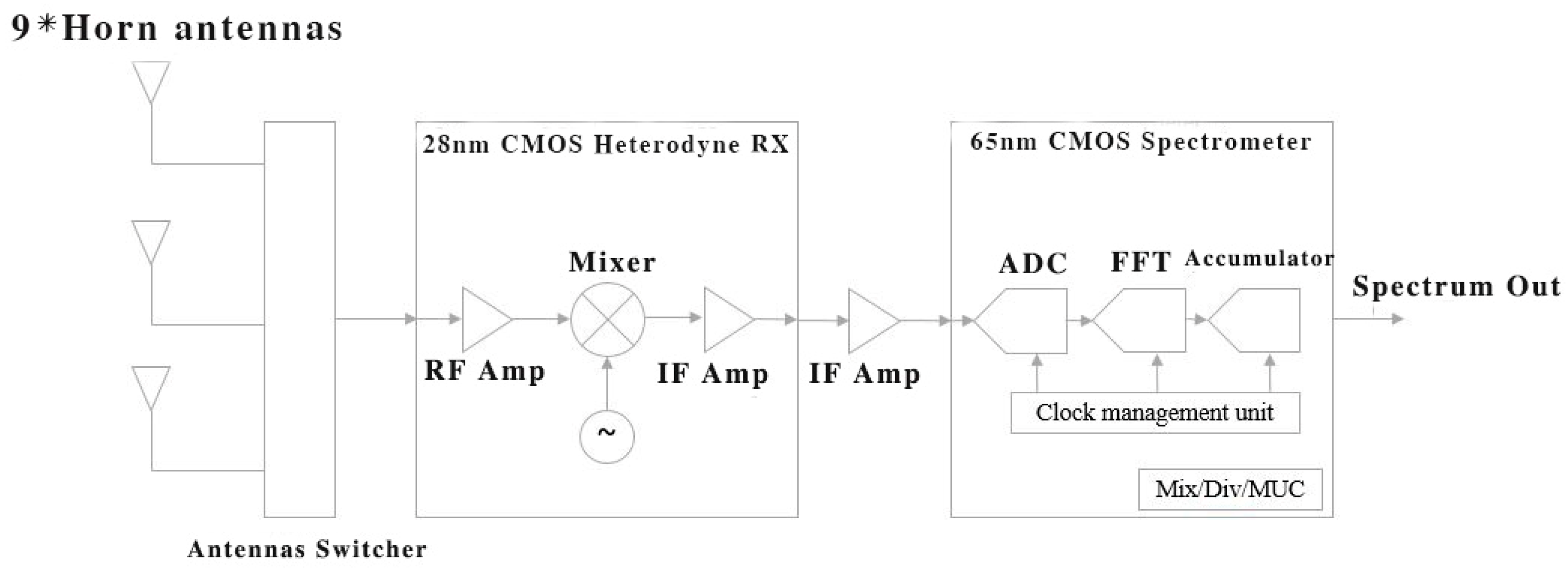
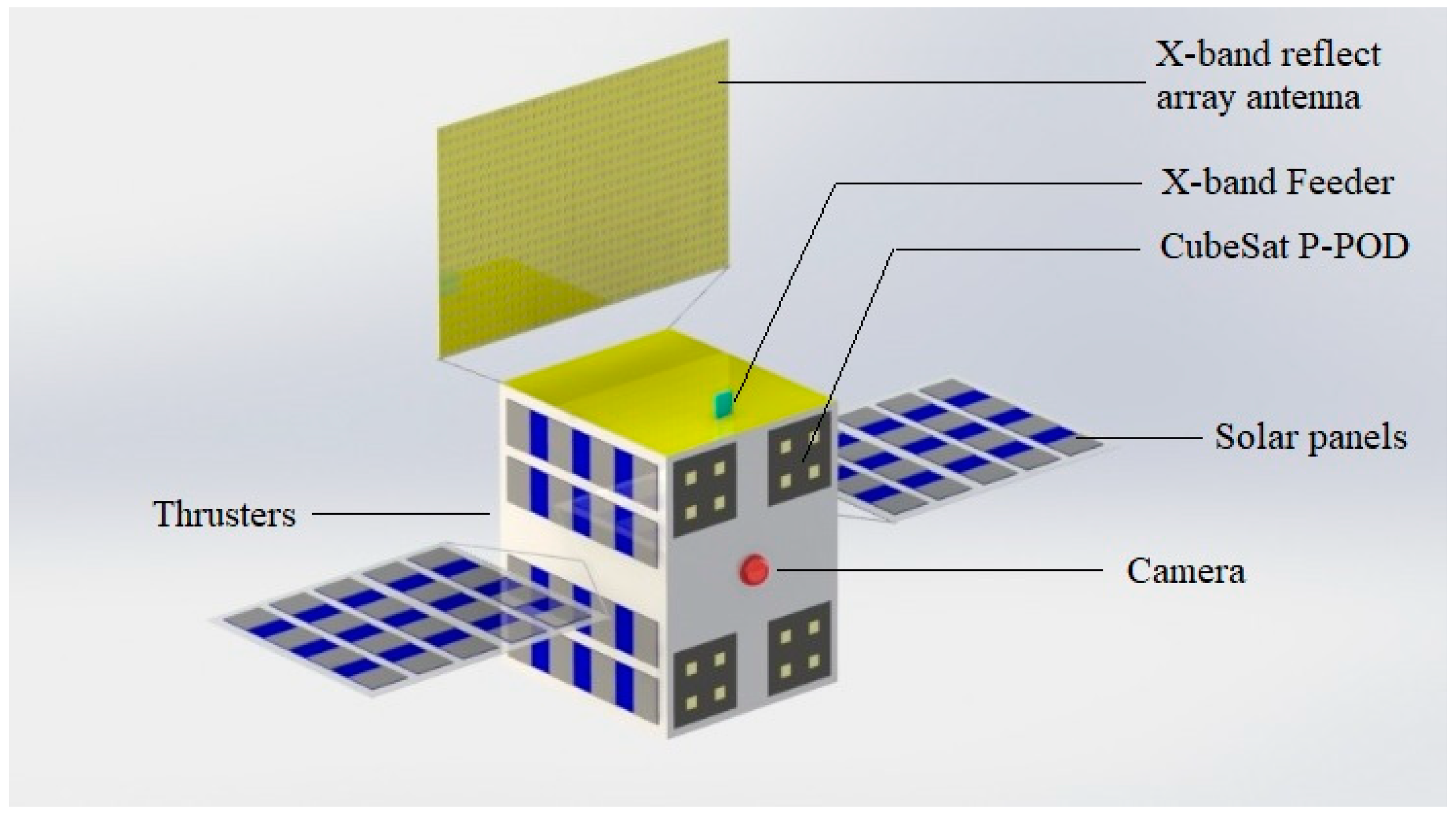
4.1. Payload Design and Primary Sketch
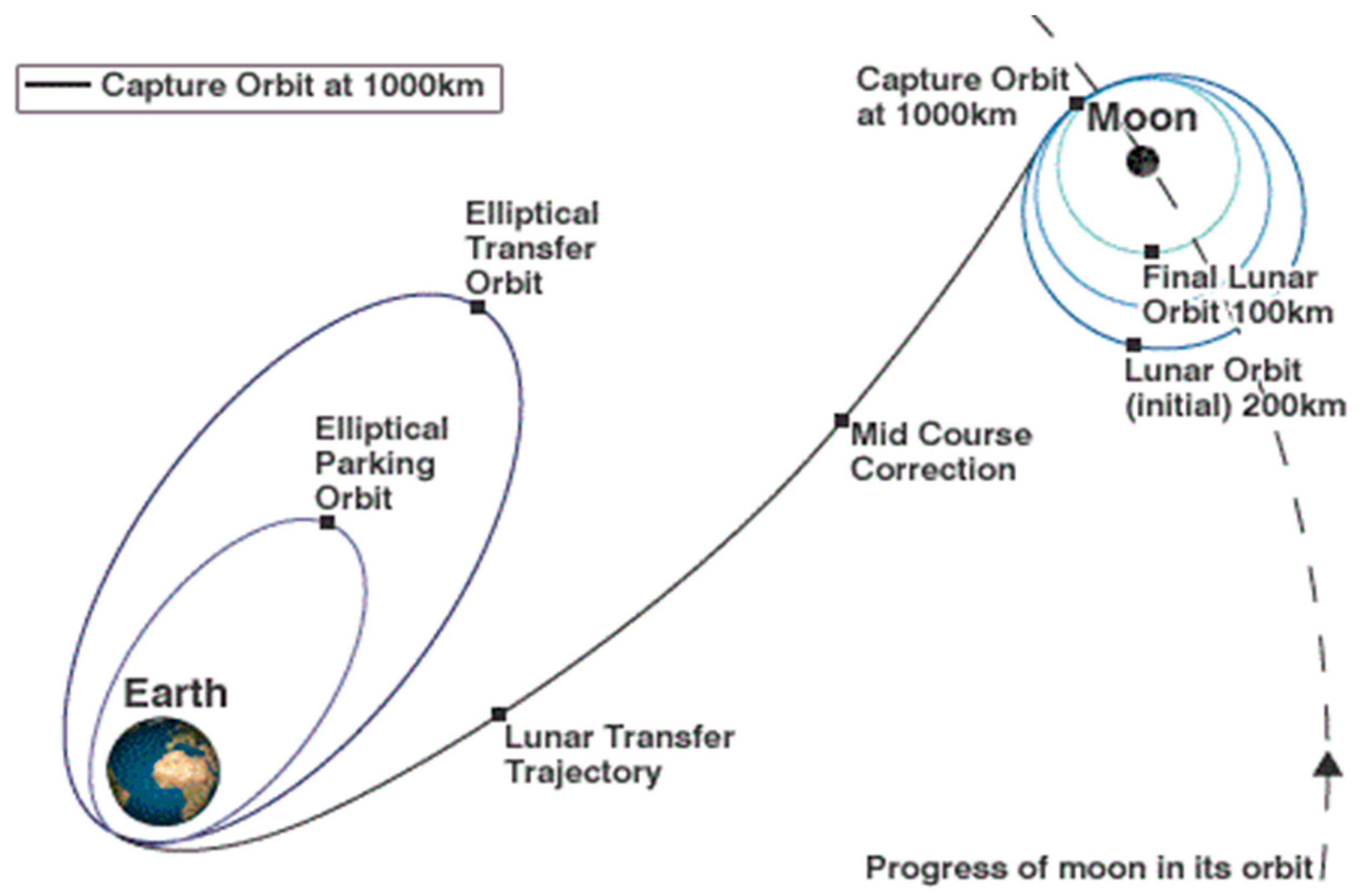
4.2. Lunar Orbit Insertion and Constellation
4.3. Attitude Determination and Control Subsystem
4.4. Telemetry Tracking and Command Subsystem
4.5. Electrical Power Subsystem Design
4.6. Structure Design
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pablo, A.; Calla, G.; Dan, F.; Chris, W.; Bethany, D. Low-Cost Asteroid Mining Using Small Spacecraft. In Proceedings of the International Astronautical Congress (IAC), Adelaide, Australia, 24 September 2017. [Google Scholar]
- Eliza, S.; Glenn, Z. The Coming the Moon rush: Technology, billionaires, and Geopolitics will all help get us back to the Moon, but they will not be enough to let us live there indefinitely. IEEE Spectr. 2019, 56, 22–25. [Google Scholar]
- Wieger, G.W.; Joep, W.; Wilfred, F.; Rinie, K.; Paul, V. Can Plants Grow on Mars and the Moon: A Growth Experiment on Mars and Moon Soil Simulants. In Proceedings of the 58th Annual Symposium of the International Association for Vegetation Science (IAVS): Understanding Broad-Scale Vegetation Patterns, Brno, Czech Republic, 19–24 July 2015. [Google Scholar]
- Radhika, R.; William, W.E.; Fatemeh, A.; Ramon, M.R.; Frank, P.; Scott, B. Survey of Inter-Satellite Communication for Small Satellite Systems: Physical Layer to Network Layer View. IEEE Commun. Surv. Tutor. 2016, 18, 2442–2473. [Google Scholar]
- Gagliano, J.A.; Platt, R.H. An Upward Looking Airborne Millimeter Wave Radiometer for Atmospheric Water Vapor Sounding and Rain Detection. Soc. Photo Opt. Instrum. Eng. (SPIE) 1985, 544, 112–117. [Google Scholar]
- Martin, V.E.; Fattinger, C.; Grischkowsky, D. Terahertz time-domain spectroscopy of water vapor. Opt. Lett. 1983, 14, 1128–1130. [Google Scholar]
- Phys.org. Available online: https://phys.org/news/2013-10-terahertz-sensor-aiming-jupiter-moons.html (accessed on 7 October 2013).
- Renju, R.; Suresh, C.; Nizy, R.; Tinu, M.; Antony, A.; Krishna, K. Microwave radiometer observations of interannual water vapor variability and verical structure over a tropical station. J. Geophys. Res. Atmos. 2015, 120, 4585–4599. [Google Scholar] [CrossRef]
- Qu, F.; Nie, P.; Lin, L.; Cai, C.; He, Y. Review of theoretical methods and research aspects for detecting leaf water conent using terahertz spectroscopy and imaging. Int. J. Agric. Biol. Eng. 2018, 11, 27–34. [Google Scholar]
- Joseph, S.M.; Yihong, Y.; Mahboubeh, M.; Grischkowsky, D. THz detection of small molecule vapors in the atmospheric transmission windows. Opt. Express 2012, 20, 6788–6807. [Google Scholar]
- Manfred, B.; Stuart, F.; Patrick, E.R.; Chawn, H.; Martian, B.; Stefan, A.B.; Manfred, B. Retrieval of an ice water path over the ocean from ISMAR and MARSS millimeter and submillimeter brightness temperatures. Atmos. Meas. Tech. 2018, 11, 611–632. [Google Scholar]
- Blackwell, W.; Allen, G.; Galbraith, C.; Hancock, T.; Leslie, R.; Osaretin, I.; Retherford, L.; Scarito, M.; Semisch, C.; Shields, M.; et al. Nanosatellites for Earth Environmental Monitoring: The MicroMAS Project. In Proceedings of the Small Satellite Conference, Rome, Italy, 5–9 March 2012. [Google Scholar]
- Blackwell, W.; Cahoy, K. Small Satellite Constellation for Data Driven Atmospheric Remote Sensing. In Proceedings of the International Conference on Dynamic Data-Driven Environmental System Science, Cambridge, MA, USA, 5–7 November 2014. [Google Scholar]
- Bergin, E.A.; Lellouch, E.; Harwit, M.; Gurwell, M.A.; Melnick, G.J.; Ashby, M.L.N.; Chin, G.; Erickson, N.R.; Goldsmith, P.F.; Howe, J.E.; et al. Submillimeter Wave Astronomy Satellite Observations of Jupiter and Saturn: Detection of 557 GHz Water Emission from the Upper Atmosphere. Astrophys. J. 2000, 539, L147. [Google Scholar] [CrossRef]
- NTRS—NASA Technical Reports Server. Available online: https://ntrs.nasa.gov/citations/20170011080 (accessed on 17 December 2019).
- Peter, S. Advanced Schottky Diode Receiver Front-Ends for Terahertz Applications. Ph.D Thesis, Chalmers University of Technology, Goteborg, Sweden, May 2011. [Google Scholar]
- Weng, C.; Liu, L.; Gao, T.; Hu, S.; Li, S.; Dou, F.; Shang, J. Multi-Channel Regression Inversion Method for Passive Remote Sensing of Ice Water Path in the Terahertz Band. Atmosphere 2019, 10, 437. [Google Scholar] [CrossRef] [Green Version]
- William, J.B. Millimeter-Wave Reciever for Low-Cost Cubesat Platforms. In Proceedings of the IEEE MTT-S International Microwave Symposium, Phoenix, AZ, USA, 17–22 May 2015. [Google Scholar]
- NASA to Launch Swarms of Small, Earth-Observing Satellites. Available online: https://www.space.com/34644-nasa-small-satellites-earth-science.html (accessed on 8 November 2016).
- Steven, C.; Resing, T.C.; Gaier, C.D.K.; Chandraskar, V.; Shannon, T.B.; Sharmila, P.; Boon, H.L.; Susan, C.v.d.H.; Tristan, S.L.; Ecuyer, C.; et al. Overview of Temporal Experiment for Storms and Tropical System (TEMPEST) CubeSat Constellation Mission. In Proceedings of the IEEE MTT-S International Microwave Symposium, Phoenix, AZ, USA, 17–22 May 2015. [Google Scholar]
- Kerri, C.; Anne, M.; Weston, M.; Timothy, C.; William, J.B.; Rebecca, B. Development of the Microwave Radiometer Technology Acceleration (MiRaTA) CubeSat for all-weather atmospheric sounding. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015. [Google Scholar]
- Freeman, J.W.; Hills, H.K., Jr.; Lindeman, R.A.; Vondrak, R.R. Observation of water vapor ions at the lunar surface. Moon 1972, 8, 115–128. [Google Scholar] [CrossRef]
- Spudis, P.D.; Bussey, D.B.J.; Baloga, S.M.; Cahill, J.T.S.; Glaze, L.S.; Patterson, G.W.; Raney, R.K.; Thomson, T.W.; Ustinov, E.A. Evidence for water ice on the Moon: Result for anomalous polar craters from the LRO Mini-RF imaging radar. J. Geophys. Res. Planets 2013, 118, 2016–2029. [Google Scholar] [CrossRef]
- Mahesh, A. Lunar Water: A Brief Review. Earth Moon Planets 2010, 107, 65–73. [Google Scholar]
- Groppi, C.; Hunter, R.; Baker, C. Highly Integrated THz Receiver Systems for Small Satellite Remote Sensing Applications. NASA Technical Reports Server. 2017. Available online: https://techport.nasa.gov/view/94030 (accessed on 1 August 2018).
- Jonathan, H.; Christopher, G.; Choonsup, L.; Robert, L.; Philip, M.; Phil, P.; Jose, S. Integrated Schottky Receiver for Small Satellite Deployment. In Proceedings of the 29th IEEE International Symposium on Space THz Technology (ISSTT2018), Pasadena, CA, USA, 31 July 2018. [Google Scholar]
- Imran, M.; Jose, S.; Christine, P.C.; Josep, M.J. THz Technology for Space Communications. In Proceedings of the Asia-Pacific Microwave Conference (APMC), Kyoto, Japan, 6–9 November 2018. [Google Scholar]
- Jamnejad, V. A dual band telescope for microwave instrument on Rosetta orbiter (MIRO). In Proceedings of the IEEE Aerospace Conference, Snowmass, CO, USA, 7 March 1999. [Google Scholar]
- Armen, P.; Alessandro, G. CubeSat evolution: Analyzing CubeSat capabilities for conducting science missions. Prog. Aerosp. Sci. 2017, 88, 59–83. [Google Scholar]
- Ana, M.C.; Diogene, A.D.; Francesco, T. Orbit Design for LUMIO: The Lunar Metroid Impacts Observer. Fundam. Astron. J. Front. Astron. Space Sci. 2018, 5, 29. [Google Scholar]
- 6U CubeSat Design Specification Rev. PROVISIONAL, The CubeSat Program, Cal Poly SLO. Available online: https://explorers.larc.nasa.gov/APMIDEX2016/MO/pdf_files/12-6U_CDS_2016-05-19_Provisional.pdf (accessed on 20 April 2016).
- Marcin, K.; Marcin, G.; Grzegorz, P. Global database of direct solar radiation at the Moon’s surface for lunar engineering purposes. In Proceedings of the VII Conference SOLINA Sustainable Development: Architecture-Building Construction-Environmental Engineering and Protection Innovative Energy-Efficient Technologies-Utilization of Renewable Energy Sources, Polańczyk, Poland, 19–23 June 2018. [Google Scholar]
- Ivo, V.; Ales, V. Efficient and Reliable Solar Panels for Small CubeSat Picosatellites. Int. J. Photoenergy 2014, 2014, 537645. [Google Scholar]
- Yanghyo, K.; Senior, M.; Yan, Z.; Theodore, J.R.; Senior, M.; Deacon, J.N.; Goutam, C. A 183-GHz InP/CMOS-Hybrid Heterodyne-Spectrometer for Spaceborne Atmospheric Remote Sensing. IEEE Trans. Terahertz Sci. Technol. 2019, 9, 313–334. [Google Scholar]
- De Graauw, T.; Helmich, F.P.; Phillips, T.G.; Stutzki, J.; Caux, E.; Whyborn, N.D.; Dieleman, P.; Roelfsema, P.R.; Aarts, H.; Assendorp, R.; et al. The Herschel-heterodyne instrument for the far-infrared. Astron. Astrophys. 2010, 518, L6. [Google Scholar] [CrossRef] [Green Version]
- Mark, B. Mission Design for the Lunar Reconnaissance Orbiter. In Proceedings of the 29th Annual Aas Guidance and Control Conference, Breckenridge, CO, USA, 4–8 February 2006. [Google Scholar]
- Tanvir, I.H.; Kamal, H.; Shihabul, I.; Al-Amin, C. Design and Performance Analysis of Microstrip Array Antennas with Optimum Parameters for X-band Application. International J. Adv. Comput. Sci. Appl. 2011, 2, 81–87. [Google Scholar]
- Cristian, I.C.; Loan, E.L.; Leonardus, P.L. Design Considerations in Sparse array antennas. In Proceedings of the European Radar Conference, Manchester, UK, 13–15 September 2006. [Google Scholar]
- Imran, M.; Choonup, L.; Erich, S. THz Diode Technology: Status, Prospects, and Applications. Proc. IEEE 2017, 105, 990–1007. [Google Scholar]
- Waydo, S.; Henry, D.; Campbell, M. CubeSat Design for LEO-Based Earth Science Missions. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 9–16 March 2002. [Google Scholar]
- Sara, S.; Benjamin, L. Optimization of cubeSat System-Level Design and Propulsion System for Earth-Escape Mission. J. Spacecr. Rocket 2015, 52, 1009–1020. [Google Scholar]
- Gaidis, M.C. Space-based applications of far infrared systems. In Proceedings of the 8th International Conference on Terahertz Technology, Darmstadt, Germany, 31 July 2000. [Google Scholar]
- Álvaro, R.C.; James, B.; Francesco, T. Attitude Control for the Lumio Cubesat in Deep Space. In Proceedings of the 70th International Astronautical Congress, Washington, DC, USA, 21–25 October 2019. [Google Scholar]
- Rodrigo, C.A.; Azhan, S.; Umunna, R.J.; Örger, N.C.; Quesada, M.R.; Morales, R.R. Lunar Orbiter CubeSat Injector. In Proceedings of the Mission Idea Contest 4th, Japan, Tokyo, 3 July 2015. [Google Scholar]
- Travis, K.; Imken, T.; Stevenson, H.; Glenn, L.E. Design and Testing of a Cold Gas Thruster for an Interplanetary CubeSat Mission. J. Small Satell. 2015, 4, 371–386. [Google Scholar]
- Mikhail, P.; Marat, A.; Anton, B.; Oleg, S.S.; Maksim, T.; Andrey, Z. Star tracker on chip. In Proceedings of the 27th Annual AIAA/USU Conference on Small Satellites, CubeSat Developers’ Workshop, San Luis Obispo, CA, USA, 1 August 2013. [Google Scholar]
- Vahid, R.N.; Hu, W. Implementation and Design of RF-Front-End Telemetry Tracking and Command Subsystem of a CubeSat with 500-km Altitude. IEEE J. Miniat. Air Space Syst. 2020, 2, 43–47. [Google Scholar]
- Nascetti, A.; Pittella, E.; Teofilatto, P.; Pisa, S. High-Gain S-band Patch Antenna System for Earth-Observation CubeSat Satellites. IEEE Antennas Wirel. Propag. Lett. 2014, 14, 434–437. [Google Scholar] [CrossRef]
- Nacer, C.; David, G.O.; Matthew, J.R.; Richard, E.H.; John, D.B.; David, J.B.; Thomas, A.C. A Review of CubeSat Antennas: From Low Earth Orbit to Deep Space. IEEE Antennas Propag. Mag. 2019, 61, 37–46. [Google Scholar]
- Shailesh, N.; Subhashish, B. Flexible Electrical Power System Controller Design and Battery Integration for 1U to 12U CubeSats. In Proceedings of the 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011. [Google Scholar]
- Kian, C. Exploring the Concept of a Deep Space Solar-Powered Small Spacecraft. Ph.D Thesis, The Faculty of California Polytechnic State University, San Luis Obispo, CA, USA, June 2018. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Microsatellite Characteristics | ||
|---|---|---|
| Components | Qty | Model |
| sun sensor | 2 | SolarMEMS nanoSSOC-D60 |
| Star tracker | 2 | Hyperion ST400 |
| IMU | 1 | Sensonor STIM 300 |
| Thruster | 2 | Aerojet MPS-130 |
| Reaction Wheels | 3 | TBD |
| Uplink Data Estimation | |
|---|---|
| Data | Value |
| Telemetry | 160 × |
| Software patch | 2 × |
| Margin | 5.4 × |
| Max data | 2.7 × |
| Typical data | 1.4 × |
| Downlink data estimation | |
| Payload data | 26 × |
| Engineering data | 8 × |
| Margin | 6.5 × |
| Total downlink data per satellite | 33.6 × |
| Total 5 satellites downlink data with mother ship | 168 × |
| CubeSat Subsystem & Their Power Usage | ||
|---|---|---|
| Item | P(W) | Duty Cyclex/113 min |
| OBDH | 0.1 | 113/113 |
| UHF transceiver TX/RX | 4/0.48 | 5/113 |
| S-band transceiver TX/RX | 12/1.2 | 3/113 |
| ADCS MCU | 0.2 | 113/113 |
| Thruster | 21 | 1/113 |
| Sun sensor | 0.006 | 113/113 |
| Star tracker | 1 | 113/113 |
| IMU | 0.01 | 113/113 |
| THz Payload | 3.15 | 113/113 |
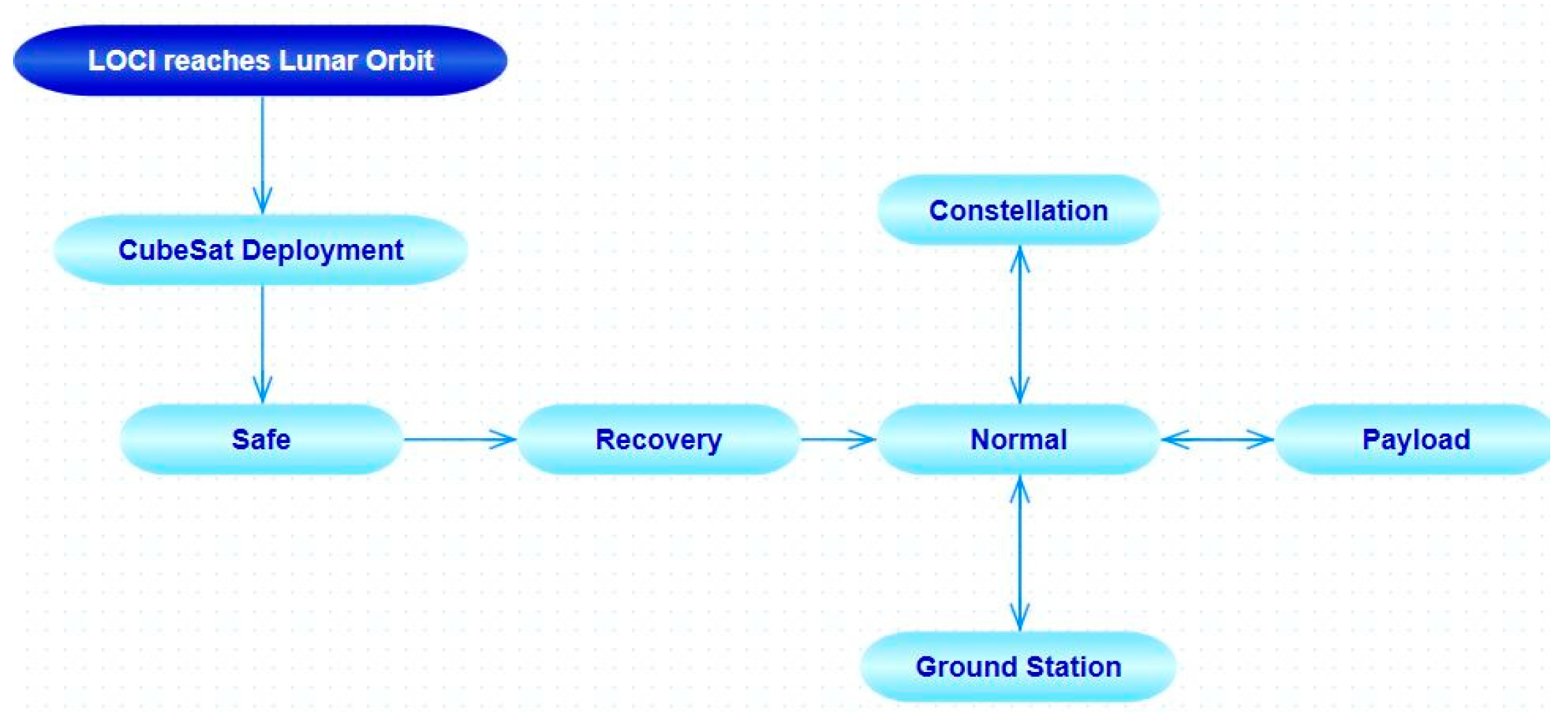
| Power usage in scenario | ||
| Mode | Active subsystems | power usage per mode (W) |
| safe | OBDH, ADCS, MCU, ADCS sensors | 1.616 |
| Recovery | OBDH, ADCS, MCU, ADCS sensors, Thruster | 2 |
| Normal | OBDH, ADCS, MCU, ADCS sensors, UHF RX/TX | 2.16 |
| Constellation | OBDH, ADCS, MCU, ADCS sensors, S-band, Thruster | 2.276 |
| Mode | Active subsystems | Power usage per mode (W) |
| Payload | OBDH, ADCS, MCU, ADCS sensors, THz | 5 |
| Subsystem | ||
|---|---|---|
| Item | Mass (gr) | Quantity |
| Thruster | 500 | 1 |
| 3U solar cells | 150 | 3 |
| 20Whr battery and Hardwares | 350 | 1 |
| Main MCU | 100 | 1 |
| UHF transceiver | 75 | 1 |
| UHF ant | 50 | 1 |
| S-band transceiver | 132 | 1 |
| S-band ant | 75 | 2 |
| Star tracker | 250 | 1 |
| Structure | 304 | 1 |
| THz payload | 400 | 1 |
| Total mass | 2761 | |
| Margin | 239 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rastinasab, V.; Hu, W.; Tahmasebi, M.K. Water Recognition on the Moon by Using THz Heterodyne-Spectrometer for Identifying the Appropriate Locations to Extract Water for Providing Oxygen for Breathing and Fuel for Spaceships’ Propulsion on the Moon with CubeSat. Aerospace 2021, 8, 186. https://doi.org/10.3390/aerospace8070186
Rastinasab V, Hu W, Tahmasebi MK. Water Recognition on the Moon by Using THz Heterodyne-Spectrometer for Identifying the Appropriate Locations to Extract Water for Providing Oxygen for Breathing and Fuel for Spaceships’ Propulsion on the Moon with CubeSat. Aerospace. 2021; 8(7):186. https://doi.org/10.3390/aerospace8070186
Chicago/Turabian StyleRastinasab, Vahid, Weidong Hu, and Mohammad Kazem Tahmasebi. 2021. "Water Recognition on the Moon by Using THz Heterodyne-Spectrometer for Identifying the Appropriate Locations to Extract Water for Providing Oxygen for Breathing and Fuel for Spaceships’ Propulsion on the Moon with CubeSat" Aerospace 8, no. 7: 186. https://doi.org/10.3390/aerospace8070186
APA StyleRastinasab, V., Hu, W., & Tahmasebi, M. K. (2021). Water Recognition on the Moon by Using THz Heterodyne-Spectrometer for Identifying the Appropriate Locations to Extract Water for Providing Oxygen for Breathing and Fuel for Spaceships’ Propulsion on the Moon with CubeSat. Aerospace, 8(7), 186. https://doi.org/10.3390/aerospace8070186