
A Holistic Approach for Optimal Pre-Planning of Multi-Path Standardized Taxiing Routes


Abstract
:1. Introduction
- (1)
- Heterogeneous traffic congestion cost modeling for airport surface sub-network. Fundamental diagrams characterizing the evolution of flow congestion at runways, taxiways, and aprons were established, and the time-based congestion cost function of sub-network at airport surface was then defined to provide the basis for optimal traffic flow assignment.
- (2)
- MPSTRs generation based on System-Optimal Traffic Assignment (SOTA). The path-based dynamic traffic assignment algorithm was improved using K shortest paths as the base scheme and minimal total congestion cost as the objective. The optimal distribution of the traffic flows in the surface network for a specific flight schedule was generated, on the basis of which the MPSTRs were extracted by balancing both optimality and path size.
- (3)
- Validation of the applicability of MPSTRs based on HITL experiments. A real-time HITL simulation experiment was conducted using a tower simulator to further validate the impact of the MPSTRs on control performance like workload, potential taxiing conflict, taxiing efficiency, etc., for different traffic patterns compared to fixed standard route strategies, providing insight into the further application of the MPSTRs.
2. Traffic Flow Congestion Characteristics on Airport Surface
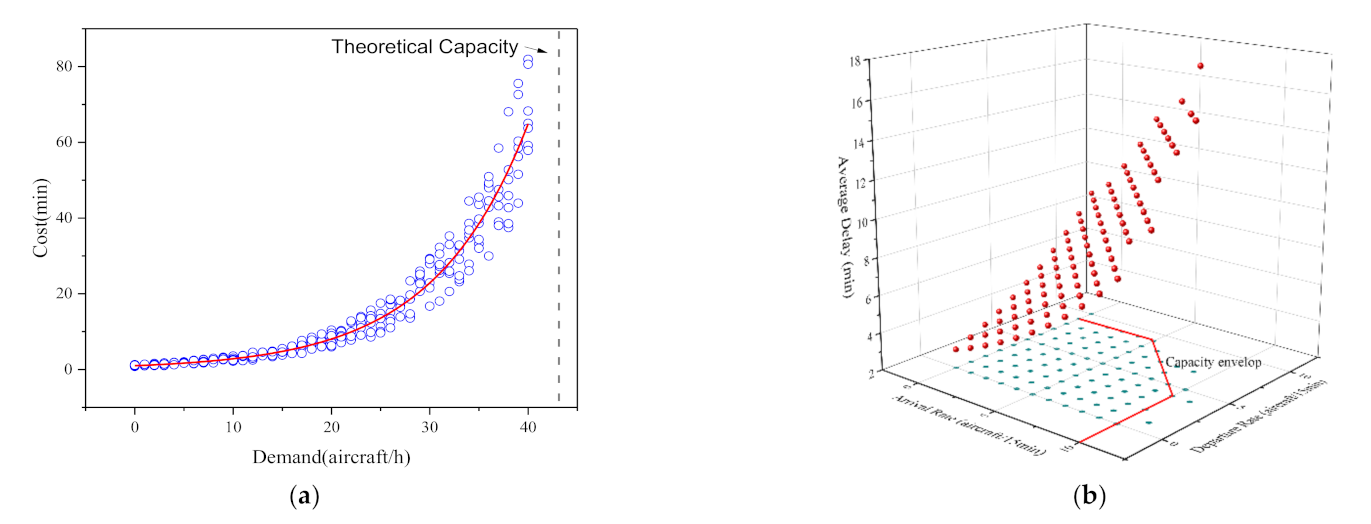
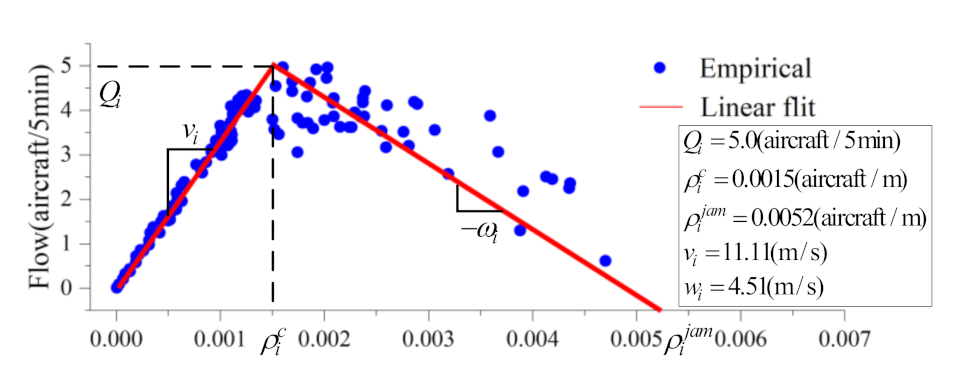
2.1. Runway Congestion Cost (RCC)
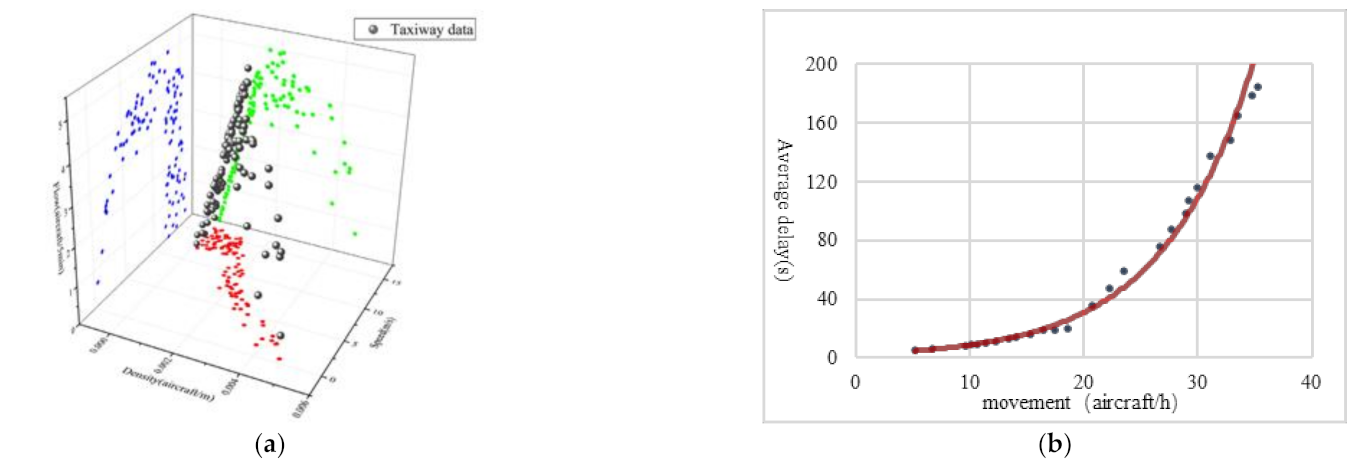
2.2. Taxiway Congestion Cost (TCC)
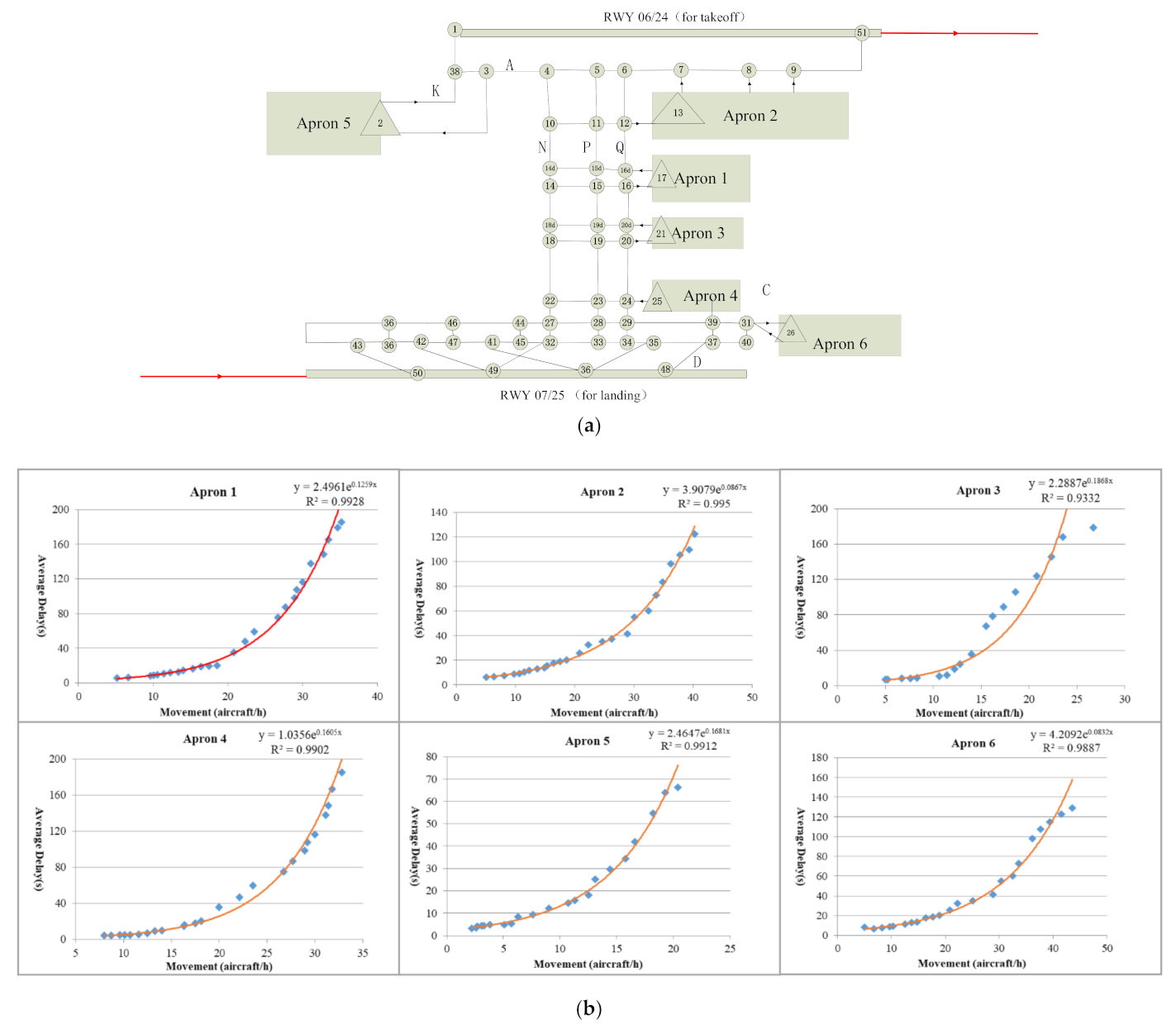
2.3. Apron Congestion Cost (ACC)
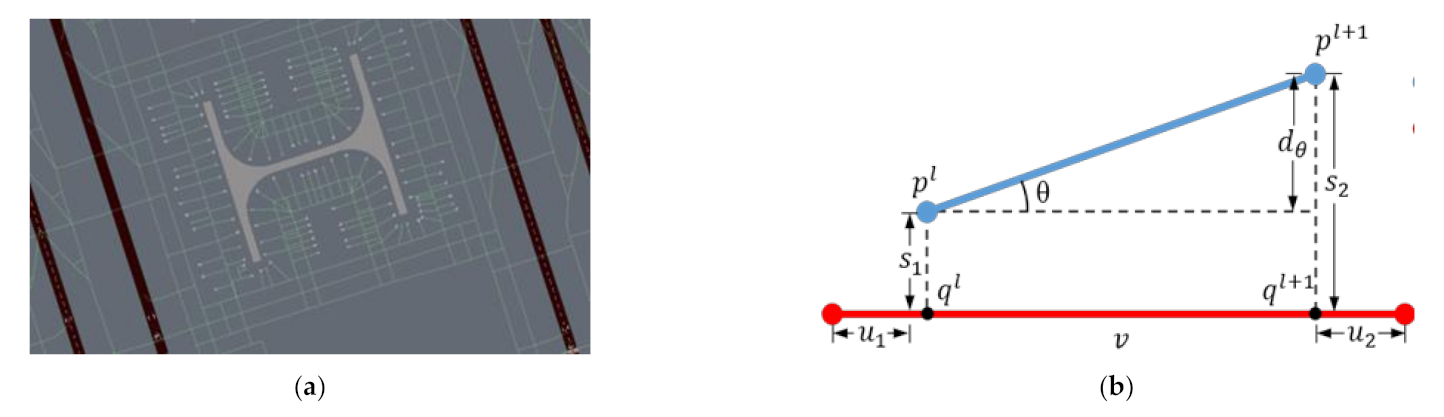
2.3.1. DBSCAN-Based Apron Sectorization
- (1)
- Path similarity measurement
- (2)
- Path difference-based clustering using DBSCAN
2.3.2. Apron Congestion Cost
3. MPSTRs Generation Based on Dynamic Traffic Flow Assignment
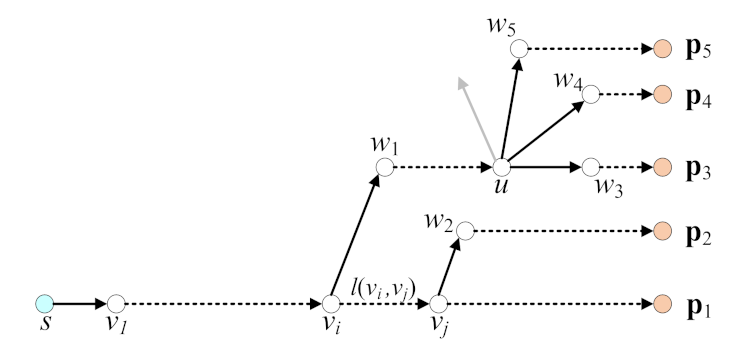
3.1. KSPs Search between Runways and Aprons
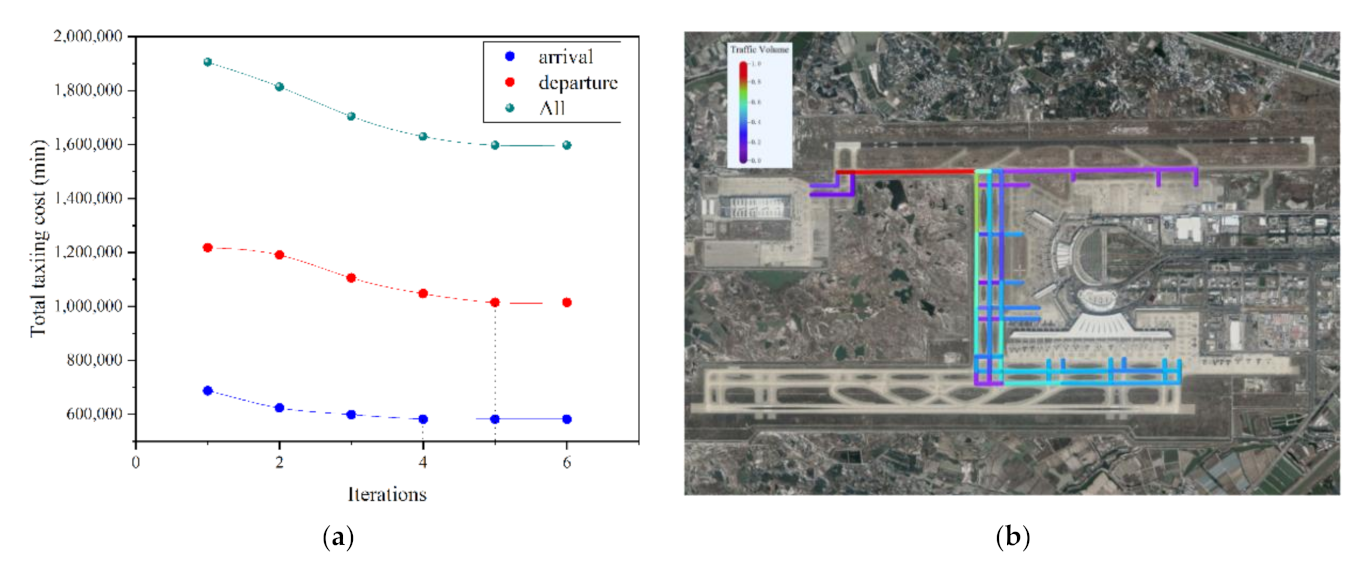
3.2. System-Optimal Traffic Assignment (SOTA) in the Surface Network
3.2.1. Model Assumptions
- (1)
- Runway and apron assignment information is acquired from the historical flight plans.
- (2)
- Taxiing routes can be selected only from the KSPs based on the assigned runway and apron.
- (3)
- Only the network between the runway and the entry/exit point of each apron area is examined.
- (4)
- Optimization is implemented at the macroscopic level, without considering the specific conflict during taxiing.
3.2.2. Symbol Description
| Set of taxiway links. | Traffic flow assigned to the link . | ||
| Set of nodes of the airport surface network, . | The average velocity function of taxiway link . | ||
| Set of the origin points of the airport surface network. Each origin point presents the exit of the runway or the exit of the apron. | The length of the link . | ||
| Set of the destination points of the airport surface network. Each destination point , presents the entrance to the apron or the runway threshold. | The congestion cost function of taxiway link . | ||
| Set of departing flights, is the total number of departing flights in the time window. | The set of aprons. Each apron is denoted as . The total number of aprons is . | ||
| Set of arriving flights and the total number of landing flights during the time window. | The number of active flights of apron g during the time window. | ||
| Departing flights, . | The average delay time function for apron operations. | ||
| Arriving flights, . | The average unimpeded travel time within apron area g. | ||
| Set of available runways, . | The set of taxiing routes for the OD pair (o-s). | ||
| Runway congestion cost function. | The kth taxiing route for the OD pair (o-s). | ||
| Number of inbound flights assigned to runway r. | Traffic demand for the OD pair (o-s). | ||
| Number of departing flights assigned to runway r. | If the taxiway link is on the kth taxiing route of the OD pair (o-s), the value is 1; otherwise, the value is 0. |
3.2.3. Decision Variables
3.2.4. Objective Function
3.2.5. Constraints
- (1)
- Non-negative constraint
- (2)
- Flow conservation constraint
- Path flow conservation: This means that for any o-s, the flow assigned to each taxiing route is conserved to ensure the consistency of taxiing.
- Link flow conservation: This ensures that the number of flights flowing in from node i on taxiway link is equal to the number of flights flowing out from node j.
- (3)
- Path capacity constraint
3.2.6. Algorithms
4. Case Study
4.1. Data
4.2. Calibration and Verification
4.2.1. Verification of Baseline Simulation Environment
4.2.2. Calibration of Congestion Cost
4.3. Extraction of Multi-Path Standard Taxiing Routes
4.3.1. K-Shortest Paths Generation
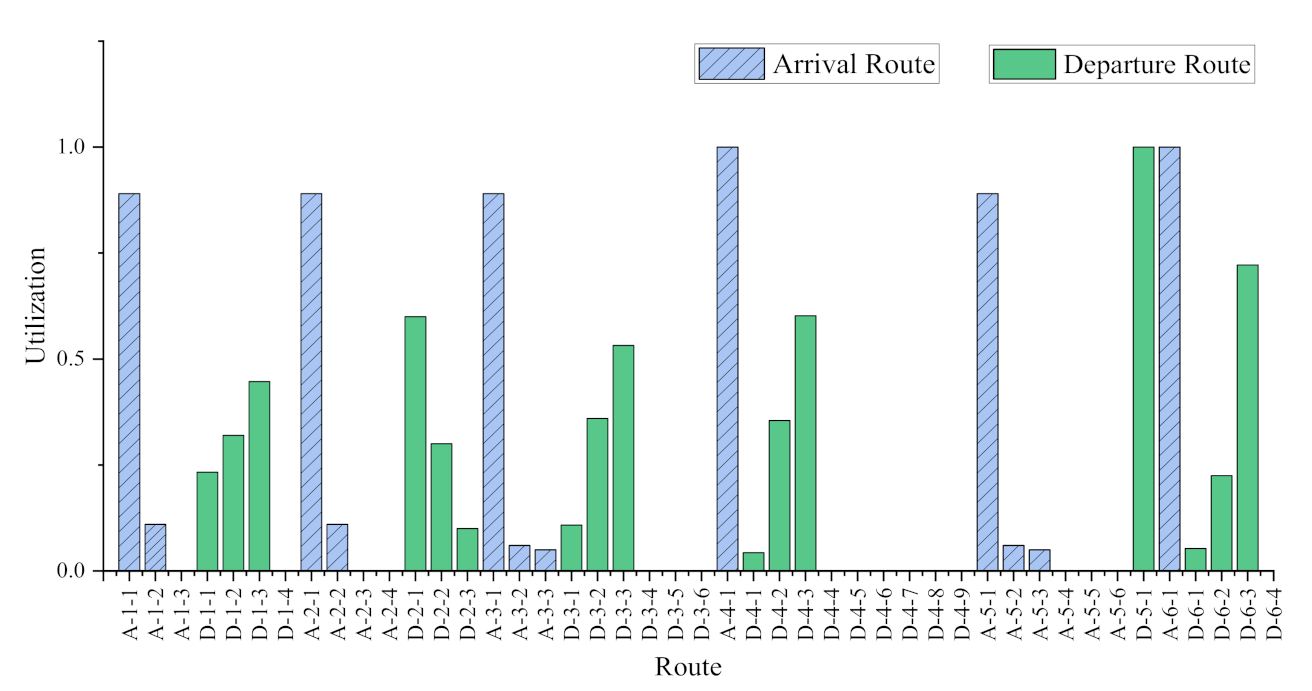
4.3.2. Prevailing Routes Analysis
4.4. The Supplementary HITL Experiment for Analyzing Operational Performance Using MPSTRs
4.4.1. Experiment Setup
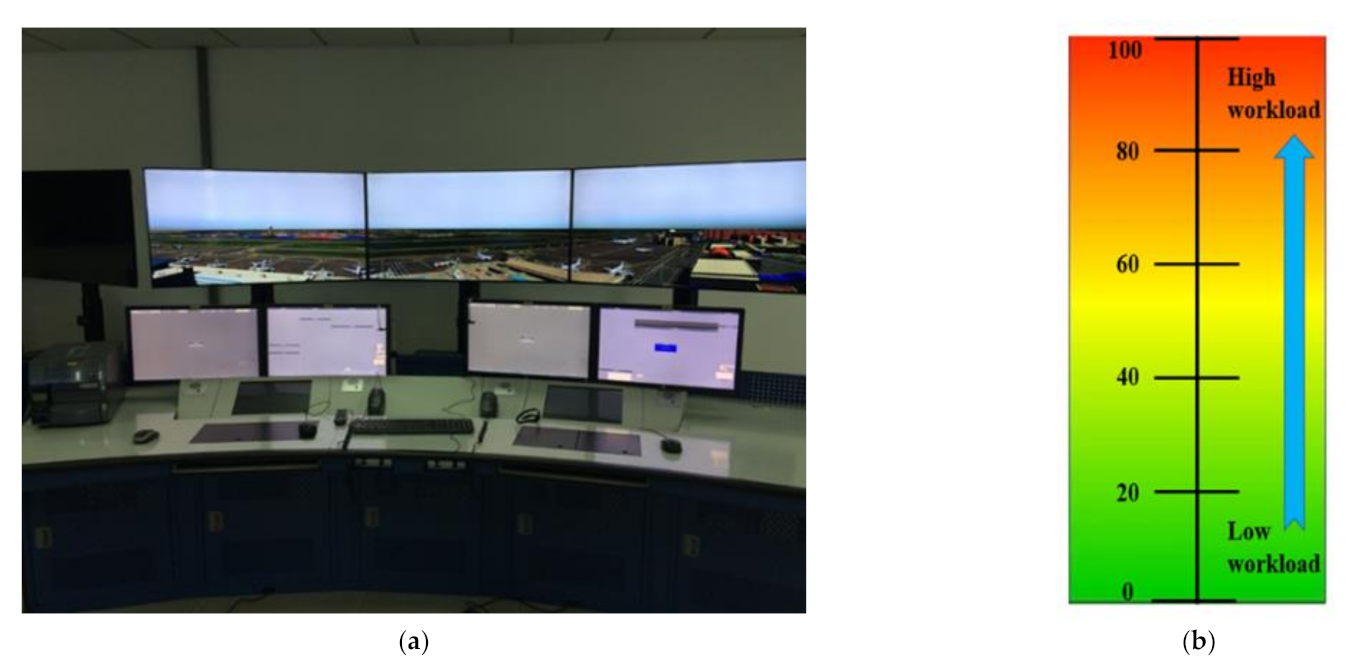
Simulation Tool
Subjects
Independent Variables
Simulation Scenario
Dependent Variables
- (1)
- Subjective workload. A one-dimensional rating scale named as Rating Scale Mental Effort (RSME) that asks for the amount of effort that has been invested during task performance [54] was used to evaluate the subjective workload. At the end of each scenario, subjects were asked for a direct assessment of the mental load that they had experienced by putting a marker on a vertical scale, as shown in Figure 12b.
- (2)
- Taxiing time. The taxiing time, defined as the operating time of the flight between the gate and the runway, reveals the overall efficiency of the airport surface operation, which is consistent with the definition mentioned above.
- (3)
- Potential conflict. The simulator recorded the number of potential conflicts between flights during the surface operation. This conflict was manifested as a complete or intermittent stop of the flights. It should be pointed out that the intermittent stops of the departure flights in the runway queue were not regarded as conflicts.
- (4)
- Number of commands. In the experiment, the controllers sent relevant commands to the flights through screen operations and the system recorded the number of mouse and keyboard operations as a supplement to the controller’s subjective workload.
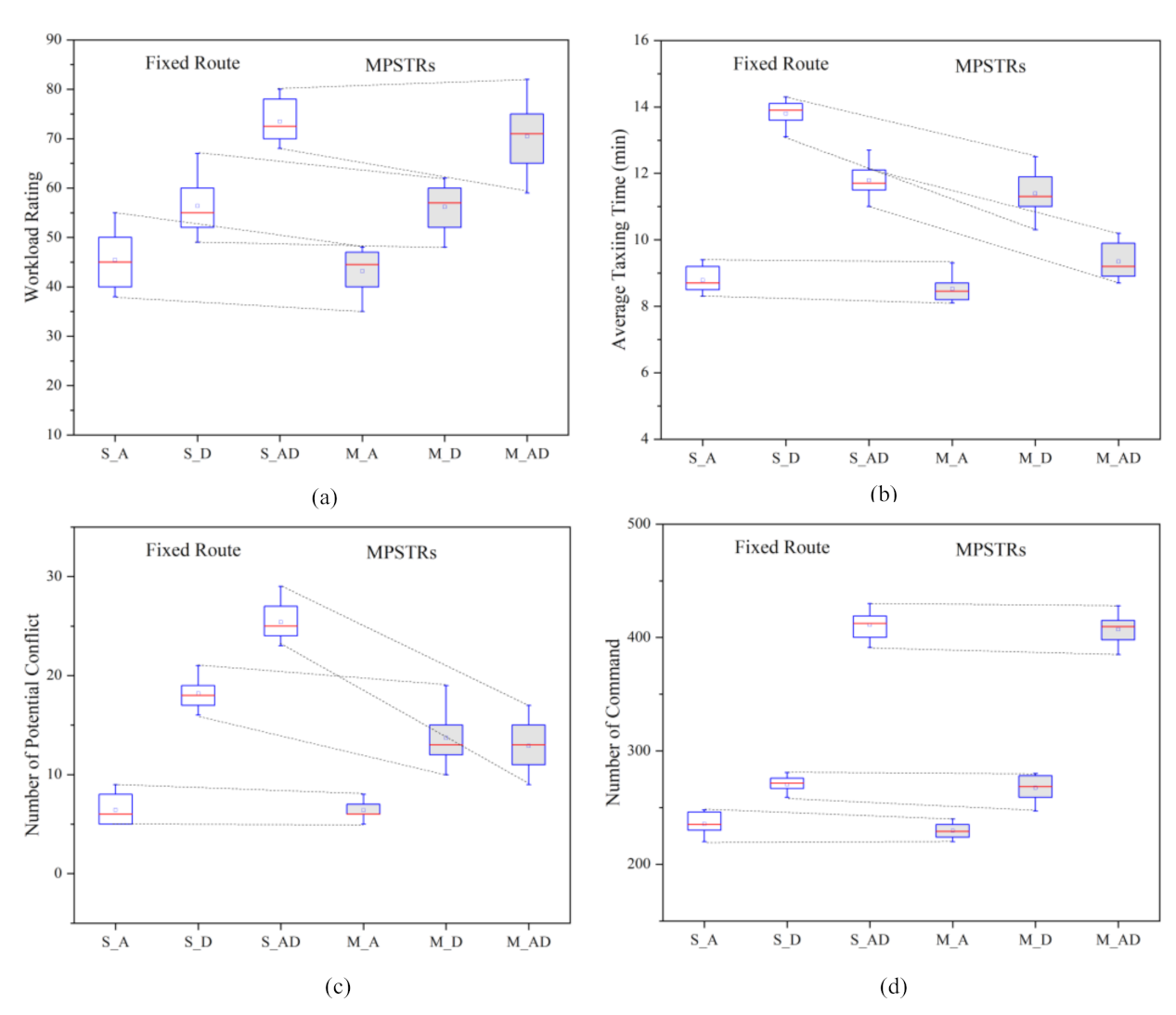
4.4.2. Results
RSME Rating
Number of Commands
Number of Potential Conflicts
Average Taxiing Time
5. Conclusions and Future Work
5.1. Main Conclusions
5.2. Limitations and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. The KSPs List
| Apron | K Value | Name | Path | Distance (m) |
| Taxi-in Routes | ||||
| 1 | 3 | A-1-1 | 34-29-24-20-16-17 | 1253 |
| A-1-2 | 33-28-23-19-15-16-17 | 1393 | ||
| A-1-3 | 32-27-22-18-14-15-16-17 | 1543 | ||
| 2 | 4 | A-2-1 | 34-29-24-20-16-12-13 | 1983 |
| A-2-2 | 33-28-23-19-15-11-12-13 | 2167 | ||
| A-2-3 | 33-28-23-19-20-16-12-13 | 2075 | ||
| A-2-4 | 32-27-22-18-14-10-11-12-13 | 2075 | ||
| 3 | 3 | A-3-1 | 34-29-24-20-21 | 976 |
| A-3-2 | 33-28-23-19-20-21 | 1169 | ||
| A-3-3 | 32-27-22-18-19-20-21 | 1068 | ||
| 4 | 1 | A-4-1 | 35-37-39--25 | 934 |
| 5 | 6 | A-5-1 | 34-29-24-20-16-12-6-5-4-3-2 | 3738 |
| A-5-2 | 33-28-23-19-15-11-5-4-3-2 | 3738 | ||
| A-5-3 | 32-27-22-18-14-10-4-3-2 | 3545 | ||
| A-5-4 | 33-28-23-19-15-14-10-4-3-2 | 3646 | ||
| A-5-5 | 33-28-23-19-15-11-5-4-3-2 | 3646 | ||
| A-5-6 | 33-32-27-22-18-14-10-4-3-2 | 3738 | ||
| 6 | 1 | A-6-1 | 35-37-40-31-26 | 1753 |
| Taxi-out Routes | ||||
| 1 | 4 | D-1-1 | 17-16d-12-6-5-4-3-1 | 2035 |
| D-1-2 | 17-16d-15d-11-5-4-3-1 | 2035 | ||
| D-1-3 | 17-16d-15d-14d-10-4-3-1 | 2219 | ||
| D-1-4 | 17-16d-15d-14d-10-11-5-4-3-1 | 2237 | ||
| 2 | 3 | D-2-1 | 13-7-6-5-4-3-38-1 | 2111 |
| D-2-2 | 13-8-7-6-5-4-3-38-1 | 2761 | ||
| D-2-3 | 13-9-8-7-6-5-4-3-38-1 | 3036 | ||
| 3 | 6 | D-3-1 | 21-20d-16-12-6-5-4-3-1 | 2591 |
| D-3-2 | 21-20d-19d-15-11-5-4-3-1 | 2591 | ||
| D-3-3 | 21-20d-19d-18d-14-10-4-3-1 | 2591 | ||
| D-3-4 | 21-20d-16-15-11-5-4-3-1 | 2591 | ||
| D-3-5 | 21-20d-16-15-14-10-4-3-1 | 2591 | ||
| D-3-6 | 21-20d-19d-15-14-10-4-3-1 | 2591 | ||
| 4 | 9 | D-4-1 | 25-24-20-16-12-6-5-4-3-1 | 3043 |
| D-4-2 | 25-24-23-19-15-11-5-4-3-1 | 3043 | ||
| D-4-3 | 25-24-23-22-18-14-10-4-3-1 | 3043 | ||
| D-4-4 | 25-24-20-16-15-11-5-4-3-1 | 3043 | ||
| D-4-5 | 25-24-20-16-15-14-10-4-3-1 | 3043 | ||
| D-4-6 | 25-24-20-19-15-11-5-4-3-1 | 3043 | ||
| D-4-7 | 25-24-20-19-18-14-10-4-3-1 | 3043 | ||
| D-4-8 | 25-24-23-19-18-14-10-4-3-1 | 3043 | ||
| D-4-9 | 25-24-23-19-15-14-10-4-3-1 | 3043 | ||
| 5 | 1 | D-5-1 | 2-38-1 | 531 |
| 6 | 4 | D-6-1 | 26-31-39-29-24-20-16-12-6-5-4-3-1 | 4617 |
| D-6-2 | 26-31-39-29--28-23-19-15-11-5-4-3-1 | 4617 | ||
| D-6-3 | 26-31-39-29-28-27-22-18-14-10-4-3-1 | 4617 | ||
| D-6-4 | 26-31-39-29-24-23-19-15-11-5-4-3-1 | 4617 | ||
References
- Yang, L.; Yin, S.; Han, K.; Haddad, J.; Hu, M. Fundamental Diagrams of Airport Surface Traffic: Models and Applications. Transp. Res. Part B 2017, 106, 29–51. [Google Scholar] [CrossRef]
- Tremaud, M. Erasing Confusion. Aero Saf. World 2010, 5, 14–19. [Google Scholar]
- Federal Aviation Administration. Standardized Taxi Routes(STR). Order 7110.116; U.S. Department of Transportation: Washington, DC, USA, 1999.
- Kristensen, A.; Andersson, S.; Matas, I.; Lane, R. Standard Airport Taxi Route Study; EUROCONTROL Experimental Center: Paris, France, 2009. [Google Scholar]
- Improving Efficiency: Hangzhou Airport Starts Implementing Standard Taxiing Route. Available online: http://www.caacnews.com.cn/1/5/201912/t20191204_1286864.html (accessed on 12 April 2019).
- Piazza, E. A-SMGCS routing and guidance functions. IEEE Aerosp. Electron. Syst. Mag. 2000, 15, 15–23. [Google Scholar] [CrossRef]
- Jakobi, J.; Teotino, D.; Montebello, P. Towards Higher-Level Services of an Advanced Surface Movement Guidance and Control System (A-SMGCS). Air Traffic Control Q. 2010, 18, 143–175. [Google Scholar] [CrossRef]
- Liu, Y.; Hansen, M.; Gupta, G.; Malik, W.; Jung, Y. Predictability impacts of airport surface automation. Transp. Res. Part C 2014, 44, 128–145. [Google Scholar] [CrossRef]
- Zhang, M.; Huang, Q.; Liu, S.; Li, H. Multi-objective optimization of aircraft taxiing on the airport surface with consideration to taxiing conflicts and the airport environment. Sustainability 2019, 11, 6728. [Google Scholar] [CrossRef] [Green Version]
- Corrigan, S.; Mårtensson, L.; Kay, A.; Okwir, S.; Ulfvengren, P.; McDonald, N. Preparing for Airport Collaborative Decision Making (A-CDM) implementation: An evaluation and recommendations. Cogn. Technol. Work 2015, 17, 207–218. [Google Scholar] [CrossRef]
- Böhme, D.; Brucherseifer, R.; Christoffels, L. Coordinated arrival departure management. In Proceedings of the 7th USA/Europe ATM R&D Seminar, Barcelona, Spain, 2–5 July 2007. [Google Scholar]
- Kjenstad, D.; Mannino, C.; Nordlander, T.E.; Schittekat, P.; Smedsrud, M. Optimizing AMAN-SMAN-DMAN at Hamburg and Arlanda airport. Proc. SID Stockh. 2013, 3, 1–6. [Google Scholar]
- Helm, S.; Classen, A.; Rudolph, F.; Werner, C.; Urban, B. Integration of landside processes into the concept of Total Airport Management. J. Air Transp. Stud. 2014, 5, 55–73. [Google Scholar] [CrossRef]
- Hall, W.D.; Fernandes, A. Key performance issues in surface collaborative decision making. In Proceedings of the 2013 IEEE/AIAA 32nd Digital Avionics Systems Conference (DASC), East Syracuse, NY, USA, 5–10 October 2013; pp. 1–15. [Google Scholar]
- Cheng, V.H.L. Surface operation automation research for airport tower and flight deck automation. In Proceedings of the 7th International IEEE Conference on Intelligent Transportation Systems, Washington, DC, USA, 3–6 October 2004; pp. 607–612. [Google Scholar]
- Cofer, D.; Amundson, I.; Sattigeri, R.; Passi, A.; Boggs, C.; Smith, E.; Gilham, L.; Byun, T.; Rayadurgam, S. Run-Time Assurance for Learning-Based Aircraft Taxiing. In Proceedings of the 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–15 October 2020; pp. 1–9. [Google Scholar]
- Hoang, T.; Jung, Y.C.; Holbrook, J.B.; Malik, W.A. Tower controllers’ assessment of the spot and runway departure advisor (SARDA) Concept. In Proceedings of the Ninth USA/Europe Air Traffic Management Research and Development Seminar, Berlin, Germany, 14–17 June 2011. [Google Scholar]
- Bakowski, D.L.; Hooey, B.L.; Foyle, D.C. Flight deck surface trajectory-based operations (STBO): A four-dimensional trajectory (4DT) simulation. In Proceedings of the 2017 IEEE/AIAA 36th Digital Avionics Systems Conference (DASC), St. Petersburg, FL, USA, 17–21 September 2017; pp. 1–10. [Google Scholar]
- Lukic, M.; Giangrande, P.; Hebala, A.; Nuzzo, S.; Galea, M. Review, challenges, and future developments of electric taxiing systems. IEEE Trans. Transp. Electrif. 2019, 5, 1441–1457. [Google Scholar] [CrossRef]
- Rathinam, S.; Montoya, J.; Jung, Y. An optimization model for reducing aircraft taxi times at the Dallas Fort Worth International Airport. In Proceedings of the 26th International Congress of the Aeronautical Sciences (ICAS), Anchorage, AK, USA, 14–19 September 2008; pp. 14–19. [Google Scholar]
- Marín, A.G.; Codina, E. Network design: Taxi planning. Ann. Oper. Res. 2008, 157, 135–151. [Google Scholar] [CrossRef]
- Evertse, C.; Visser, H.G. Real-time airport surface movementplanning: Minimizing aircraft emissions. Transp. Res. Part C 2017, 79, 224–241. [Google Scholar] [CrossRef]
- Clare, G.; Richards, A.G. Optimization of taxiway routing and runway scheduling. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1000–1013. [Google Scholar] [CrossRef]
- Marín, Á.G. Airport taxi planning: Lagrangian decomposition. J. Adv. Transp. 2013, 47, 461–474. [Google Scholar] [CrossRef]
- Atkin, J.A.D.; Burke, E.K.; Ravizza, S. The airport ground movement problem: Past and current research and future directions. In Proceedings of the 4th International Conference on Research in Air Transportation (ICRAT), Budapest, Hungary, 1–4 June 2010; pp. 131–138. [Google Scholar]
- Hall, A.; Gabilondo, M.; Dechev, D. Using parallelization to improve the efficiency of an automated taxi route generation algorithm. Open Comput. Sci. 2012, 2, 118–127. [Google Scholar] [CrossRef]
- Czarnecki, M.; Skorupski, J. Method for identification of conflict points in the intelligent system of an aircraft taxi route choice. Arch. Transp. Syst. Telemat. 2015, 8, 9–14. [Google Scholar]
- Bakowski, D.L.; Hooey, B.L.; Foyle, D.C.; Wolter, C.A. NextGen Surface Trajectory-Based Operations (STBO): Evaluating conformance to a four-dimensional trajectory (4DT). Procedia Manuf. 2015, 3, 2458–2465. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Weiszer, M.; Stewart, P.; Shabani, M. Toward a more realistic, cost-effective, and greener ground movement through active routing—part i: Optimal speed profile generation. IEEE Trans. Intell. Transp. Syst. 2015, 17, 1196–1209. [Google Scholar] [CrossRef] [Green Version]
- Obajemu, O.; Mahfouf, M.; Maiyar, L.M.; Al-Hindi, A.; Weiszer, M.; Chen, J. Real-time four-dimensional trajectory generation based on gain-scheduling control and a high-fidelity aircraft model. Engineering 2021, 7, 495–506. [Google Scholar] [CrossRef]
- Zhang, T.; Ding, M.; Zuo, H.; Chen, J.; Weiszer, M.; Qian, X.; Burke, E.K. An online speed profile generation approach for efficient airport ground movement. Transp. Res. Part C 2018, 93, 256–272. [Google Scholar] [CrossRef]
- Liu, C.; Ferrari, S. Vision-guided planning and control for autonomous taxiing via convolutional neural networks. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 928. [Google Scholar]
- Saez Nieto, F.J. The long journey toward a higher level of automation in ATM as safety critical, sociotechnical and multi-Agent system. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2016, 230, 1533–1547. [Google Scholar] [CrossRef]
- Ma, J.; Delahaye, D.; Sbihi, M.; Scala, P.; Mota, M.M. A study of tradeoffs in airport coordinated surface operations. In Proceedings of the 5th ENRI International Workshop on ATM/CNS: Drafting Future Skies, Nakano, Japan, 29–31 October 2017. [Google Scholar]
- Kim, A.; Hansen, M. Validation of runway capacity models. Transp. Res. Rec. 2010, 2177, 69–77. [Google Scholar] [CrossRef] [Green Version]
- Guo, H.; Zhu, J. Calculation models of capacity and delay for y closely spaced parallel runway. J. Traffic Transp. Eng. 2008, 18, 68–72. [Google Scholar]
- Federal Aviation Administration. Airport Capacity and Delay. Advisory Circular, 150/5060-5; Office of Airport Planning & Programming, Planning & Environmental Division: Washington, DC, USA, 1983.
- Hansen, M. Micro-level analysis of airport delay externalities using deterministic queuing models: A case study. J. Air Transp. Manag. 2002, 8, 73–87. [Google Scholar] [CrossRef]
- Tee, Y.Y.; Zhong, Z.W. Modelling and simulation studies of the runway capacity of Changi Airport. Aeronaut. J. 2018, 122, 1022–1037. [Google Scholar] [CrossRef]
- Bazargan, M.; Fleming, K.; Subramanian, P. A simulation study to investigate runway capacity using TAAM. In Proceedings of the Winter Simulation Conference, San Diego, CA, USA, 8–11 December 2002; Volume 2, pp. 1235–1243. [Google Scholar]
- Daganzo, C.F. The cell transmission model: A dynamic representation of highway traffic consistent with the hydrodynamic theory. Transp. Res. Part B 1994, 28, 269–287. [Google Scholar] [CrossRef]
- Khan, K.; Rehman, S.U.; Aziz, K.; Fong, S.; Sarasvady, S. DBSCAN: Past, present and future. In Proceedings of the Fifth International Conference on the Applications of Digital Information and Web Technologies (ICADIWT 2014), Bangalore, India, 17–19 February 2014; pp. 232–238. [Google Scholar]
- Chen, J.; Leung, M.K.H.; Gao, Y. Noisy logo recognition using line segment Hausdorff Distance. Pattern Recognit. 2003, 36, 943–955. [Google Scholar] [CrossRef] [Green Version]
- Hermes, C.; Wohler, C.; Schenk, K.; Kummert, F. Long-term vehicle motion prediction. In Proceedings of the 2009 IEEE Intelligent Vehicles Symposium, Xi’an, China, 3–5 June 2009; pp. 652–657. [Google Scholar]
- Vlachos, M.; Kollios, G.; Gunopulos, D. Discovering similar multidimensional trajectories. In Proceedings of the 18th International Conference on Data Engineering, San Jose, CA, USA, 26 February–1 March 2002; pp. 673–684. [Google Scholar]
- Popat, S.K.; Emmanuel, M. Review and comparative study of clustering techniques. Int. J. Comput. Sci. Inf. Technol. 2014, 5, 805–812. [Google Scholar]
- Eppstein, D. Finding the k shortest paths. SIAM J. Comput. 1998, 28, 652–673. [Google Scholar] [CrossRef] [Green Version]
- Yen, J.Y. Finding the k shortest loopless paths in a network. Manag. Sci. 1971, 17, 712–716. [Google Scholar] [CrossRef]
- Chen, J.C. Dijkstra’s shortest path algorithm. J. Formaliz. Math. 2003, 15, 237–247. [Google Scholar]
- Wang, Y.; Szeto, W.Y.; Han, K.; Friesz, T.L. Dynamic traffic assignment: A review of the methodological advances for environmentally sustainable road transportation applications. Transp. Res. Part B 2018, 111, 370–394. [Google Scholar] [CrossRef]
- Van Vliet, D. The Frank-Wolfe algorithm for equilibrium traffic assignment viewed as a variational inequality. Transp. Res. Part B 1987, 21, 87–89. [Google Scholar] [CrossRef]
- Wang, X.; Brownlee, A.E.; Woodward, J.R.; Weiszer, M.; Mahfouf, M.; Chen, J. Aircraft taxi time prediction: Feature importance and their implications. Transp. Res. Part C 2021, 124, 102892. [Google Scholar] [CrossRef]
- Zhuang, Q.; Xi, Y. Construction Scheme of Airport Apron Tower Automation System. Aeronaut. Comput. Tech. 2019, 49, 110–119. [Google Scholar]
- Hermes, P.; Mulder, M.; van Paassen, M.M.; Boering, J.H.L.; Huisman, H. Solution space based analysis of the difficulty of aircraft merging tasks. J. Aircr. 2009, 46, 1995–2015. [Google Scholar] [CrossRef]
- Yang, L.; Han, K.; Borst, C.; Mulder, M. Impact of aircraft speed heterogeneity on contingent flow control in 4D en-route operation. Transp. Res. Part C 2020, 119, 102746. [Google Scholar] [CrossRef]
- Stamp, R.G. The DORATASK Method of Assessing ATC Sector Capacity—An Overview; DORA Commun. 8934, Issue 2; Department of Operational Research and Analysis (DORA), Civil Aviation Authority: London, UK, 1992. [Google Scholar]
- Badrinath, S.; Li, M.Z.; Balakrishnan, H. Integrated surface–airspace model of airport departures. J. Guid. Control Dyn. 2019, 42, 1049–1063. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step 1: | Initialize Q as an empty queue. |
| Step 2: | Find the shortest path using the Dijkstra algorithm [49]. If k = 1, STOP; otherwise, Add to Q, a set of candidate paths that will be used to search . To generate the candidate paths, repeat Steps 2.1–2.3 for any : |
| Step 2.1: | Remove e from network G. |
| Step 2.2: | Find the shortest path from tail(e) to t that does not overlap with the nodes in , where . If exists, add path to Q. It can be seen that deviates from at node tail(e). Let tail(e) be the deviating node of path , denoted as . |
| Step 2.3: | Recover e removed in Step 2.1. |
| Step 3: | Let i = 2. |
| Step 4: | If Q is empty, STOP (that is, there are no more available paths); otherwise, find the shortest path in Q, remove it from Q, and set . If , then STOP (that is, all the k shortest paths are found); otherwise, find the deviated paths of and add them to Q. |
| Step 5: | If i = i + 1, return to Step 3. |
| Step 1: | Initialization. Extract the congestion cost and let . Iteratively retrieve the shortest paths between each OD pair and assign all the flow between each o-s in the unit time window to , i.e., . The initial flow on each link is recorded as . Lei n = 1 and add to with its flow . |
| Step 2: | Update. Let . |
| Step 3: | Descent direction. According to , the shortest paths between each OD pair are traversed and retrieved, and all the flow between each o-s within the unit time window are assigned to route , i.e., . Then, the link flows are directly recorded. |
| Step 4: | Determine the step size. Solve for that satisfies using the dichotomy method. |
| Step 5: | Move and update the route flow. |
| Step 5.1: | Move. Let . |
| Step 5.2: | Traverse the OD pairs and update the path flow using Equation (18). |
| Step 6: | Termination condition. If , the algorithm terminates; otherwise, n = n+1, then go to step 2. |
| Historical Statistics | Macroscopic Simulation | Error | Relative Error | |||
|---|---|---|---|---|---|---|
| Mean | Standard Deviation | Mean | Standard Deviation | |||
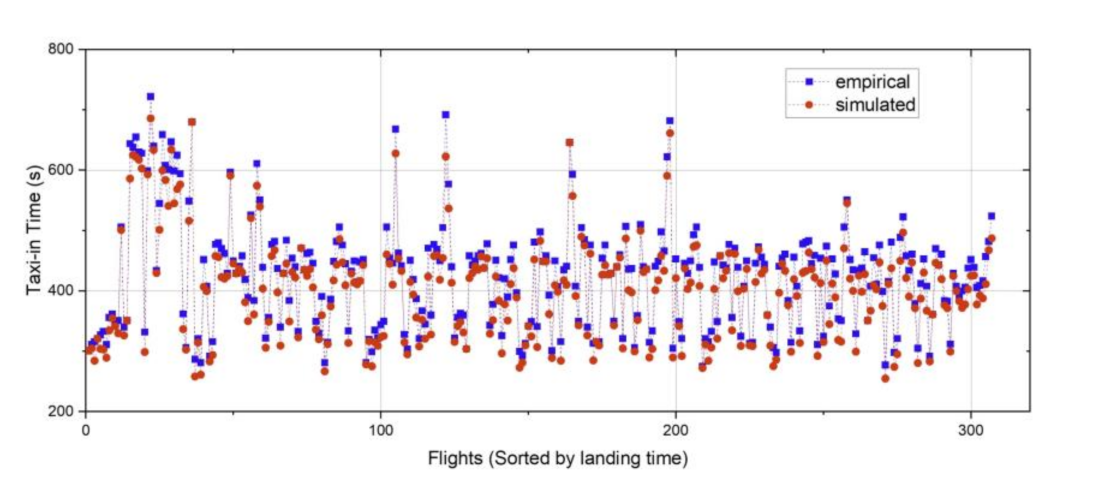
| Arrival | 6.84 min | 6.28 min | 0.56 min | 0.48 min | 8.2% | 7.3% |
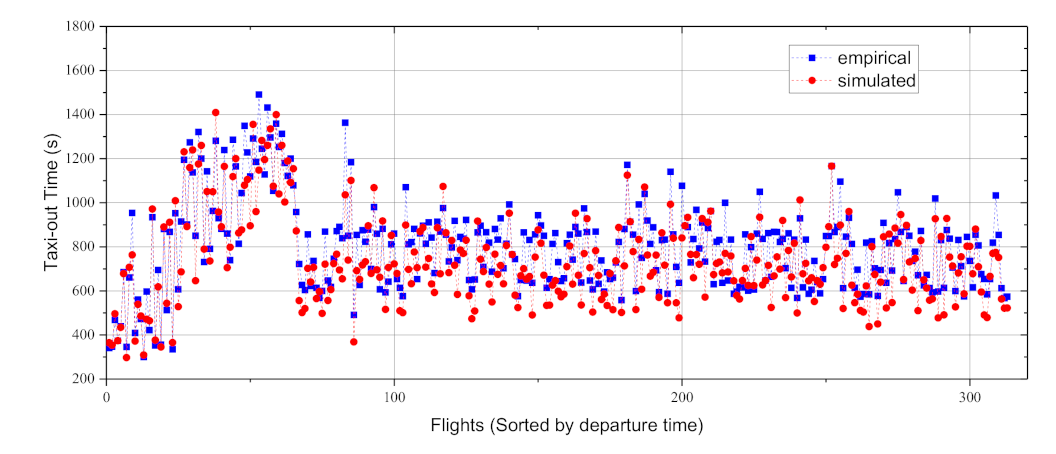
| Departure | 11.77 min | 11.12 min | 0.65 min | 0.72 min | 5.5% | 6.9% |
| Mean Ranks | Mean Ranks | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| A | D | AD | A | D | AD | ||||||
| RSME | Number of Commands | ||||||||||
| Fixed Route | 18.20 | <0.001 | 1.10 | 1.90 | 3.00 | Fixed Route | 20.00 | <0.001 | 1.00 | 2.00 | 3.00 |
| MPSTRs | 16.80 | <0.001 | 1.00 | 2.20 | 2.80 | MPSTRs | 20.00 | <0.001 | 1.00 | 2.00 | 3.00 |
| Number of Potential Conflict | Average Taxiing Time | ||||||||||
| Fixed Route | 20.00 | <0.001 | 1.00 | 2.00 | 3.00 | Fixed Route | 20.00 | <0.001 | 1.00 | 3.00 | 2.00 |
| MPSTRs | 15.20 | 0.001 | 1.00 | 2.60 | 2.40 | MPSTRs | 20.00 | <0.001 | 1.00 | 3.00 | 2.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.; Wang, S.; Liang, F.; Zhao, Z. A Holistic Approach for Optimal Pre-Planning of Multi-Path Standardized Taxiing Routes. Aerospace 2021, 8, 241. https://doi.org/10.3390/aerospace8090241
Yang L, Wang S, Liang F, Zhao Z. A Holistic Approach for Optimal Pre-Planning of Multi-Path Standardized Taxiing Routes. Aerospace. 2021; 8(9):241. https://doi.org/10.3390/aerospace8090241
Chicago/Turabian StyleYang, Lei, Simin Wang, Fengjie Liang, and Zheng Zhao. 2021. "A Holistic Approach for Optimal Pre-Planning of Multi-Path Standardized Taxiing Routes" Aerospace 8, no. 9: 241. https://doi.org/10.3390/aerospace8090241
APA StyleYang, L., Wang, S., Liang, F., & Zhao, Z. (2021). A Holistic Approach for Optimal Pre-Planning of Multi-Path Standardized Taxiing Routes. Aerospace, 8(9), 241. https://doi.org/10.3390/aerospace8090241