
Variational Bayesian Iteration-Based Invariant Kalman Filter for Attitude Estimation on Matrix Lie Groups


Abstract
:1. Introduction
2. Primaries and Problem Definition
2.1. Matrix Lie Groups and the Concentrated Gaussian Distribution
2.2. The Attitude Estimation Systems on Special Orthogonal Group SO(3)
2.3. The Invariant Kalman Filter for Attitude Estimation
2.4. The Constraint on the Invariant Kalman Filter for Attitude Estimation
3. Variational Iteration-Based Invariant Kalman Filter for Attitude Estimation
3.1. Distribution Definition for the Prior Error Covariance
3.2. Variational Bayesian Approximations of Posterior PDF
3.3. The Variational Bayesian Iteration-Based Invariant Kalman Filter
| Algorithm 1. The filtering steps of one time instant in the proposed approach to attitude estimation. |
| Inputs: , , , , , , d = 3, , |
| Time update: |
| 1: |
| 2: |
| Measurement update: |
| 3: Initialization: , , , , |
| for i from 0 to N−1 |
| update given : |
| 4: , , |
| update given : |
| 5: , |
| 6: |
| 7: , |
| 8: |
| end for |
| 9: , , , , |
| Outputs: , , , |
3.4. Parameter Selection for the Proposed Approach to Attitude Estimation on SO(3)
- (1)
- In the parameter setting shown in Algorithm 1, the initialization of the parameter at the kth time instant is based on the estimate of the last time instant, i.e., ; the advantage of this setting is that usage of an inaccurate can be avoided, but the validity of the parameter actually assumes that the filtering remains around its steady state. A similar usage can be found in [21,23,24,25].
- (2)
- The variational Bayesian iteration method is based on fixed-point iterations that are only guaranteed to converge to a local optimum [28], and iteratively updating steps are employed to reduce the negative influence caused by an inaccurate covariance parameter. A similar usage can be found in [26,27].
- (3)
- The precision and convergence performance of the proposed approach can be further improved by regulating the filtering process into a steady state; for example, using a larger for the first few time instants of the filtering process to initialize the of the proposed approach will contribute to better results.
4. Numerical Simulations
- (1)
- (2)
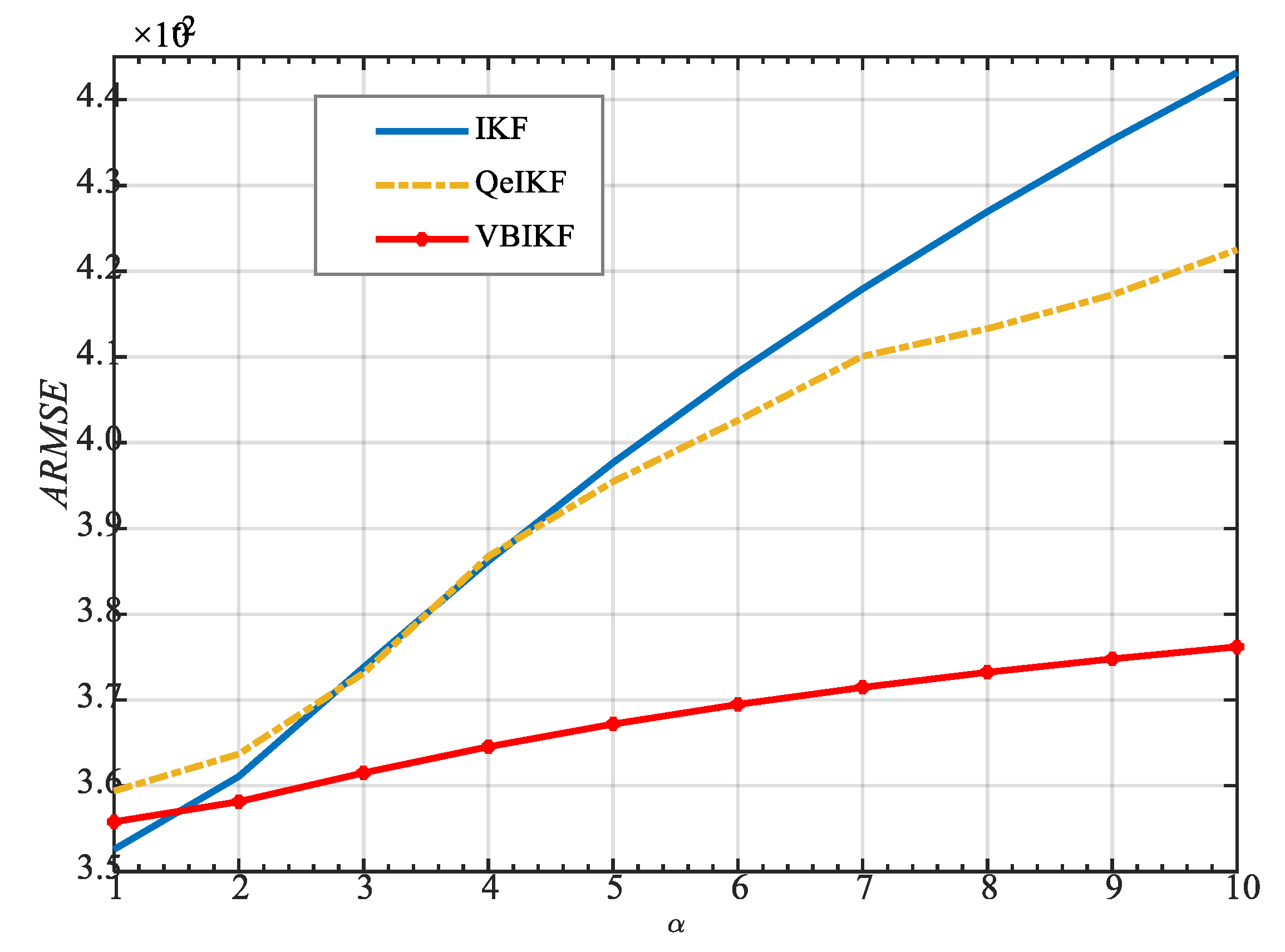
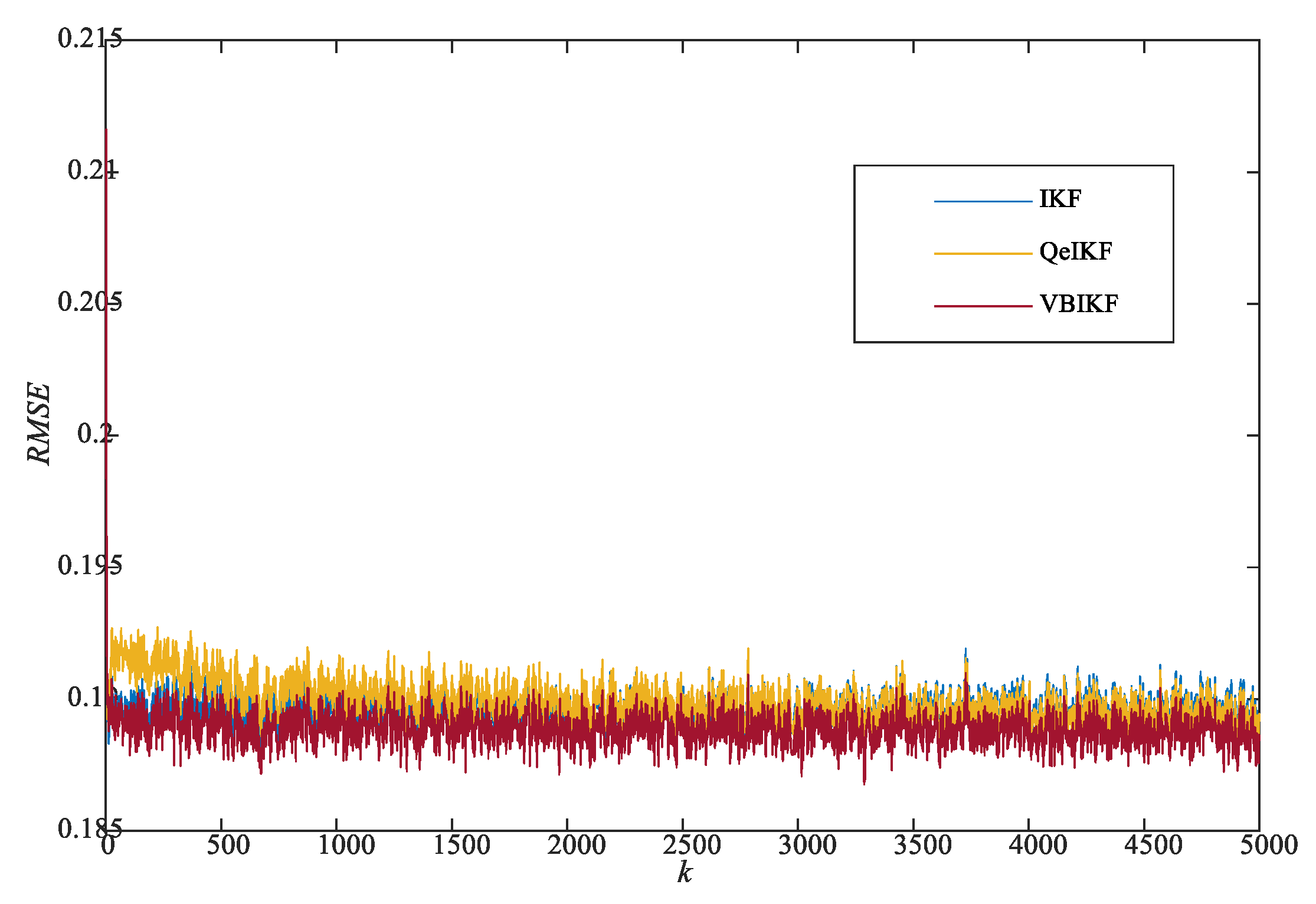
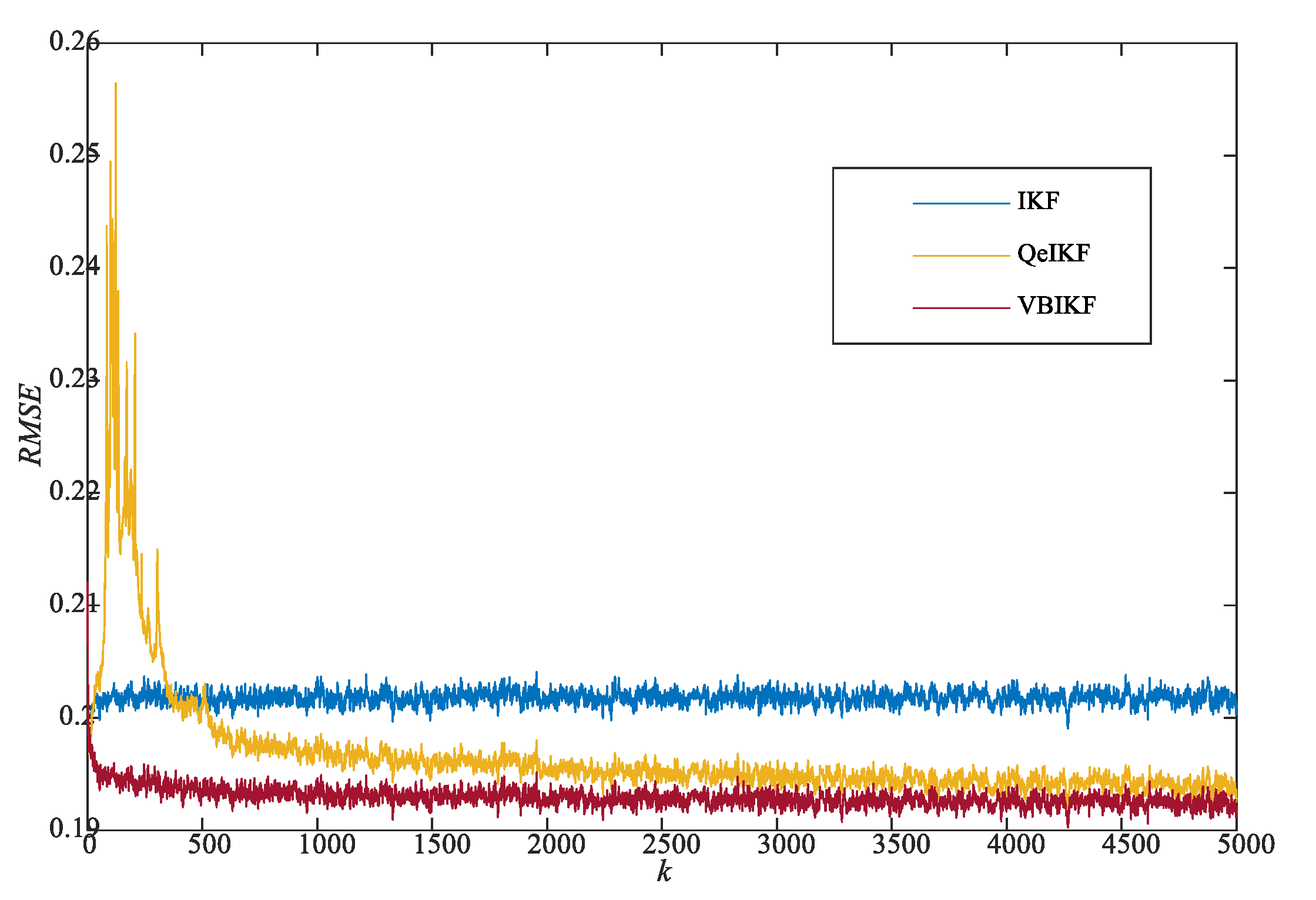
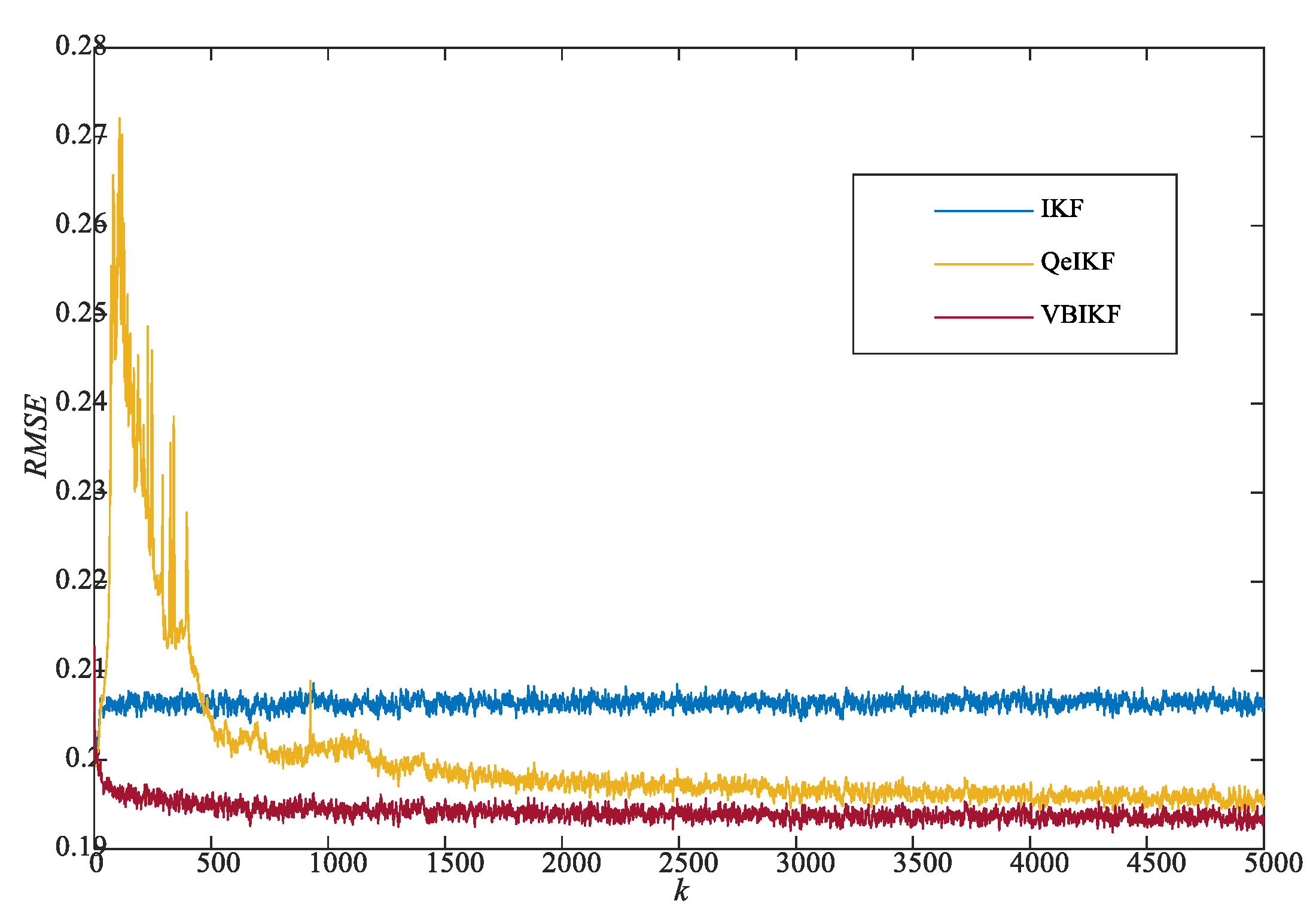
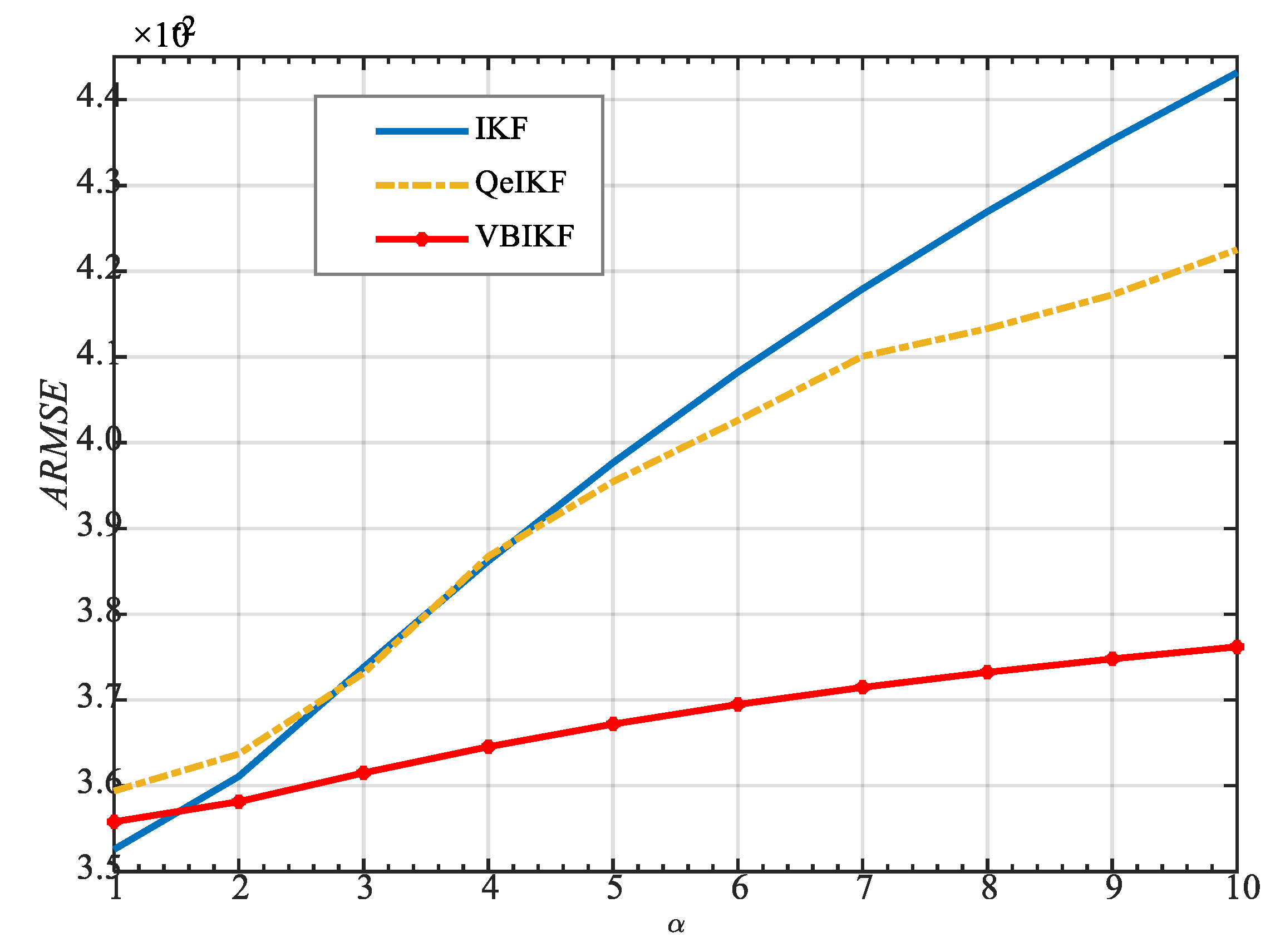
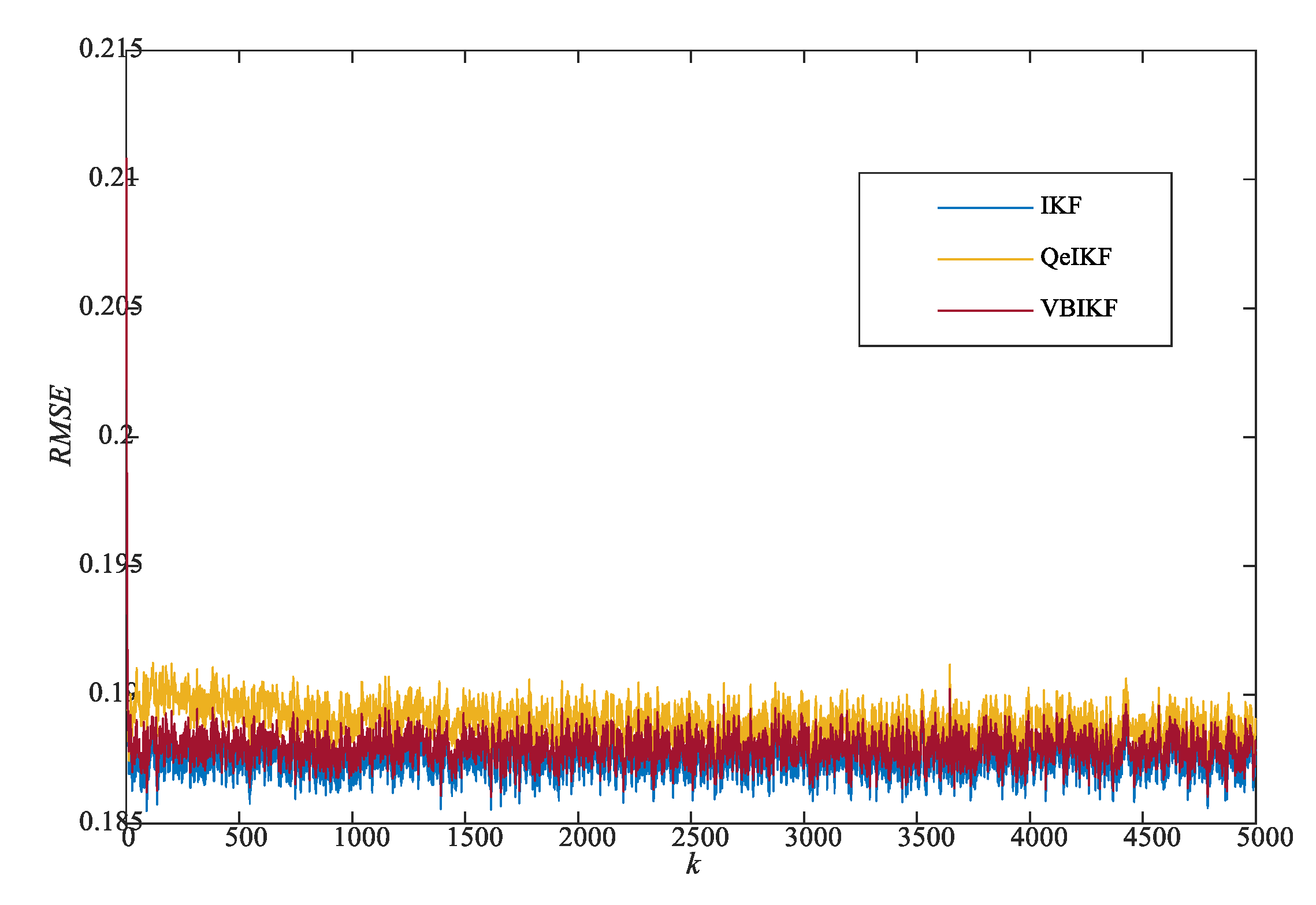
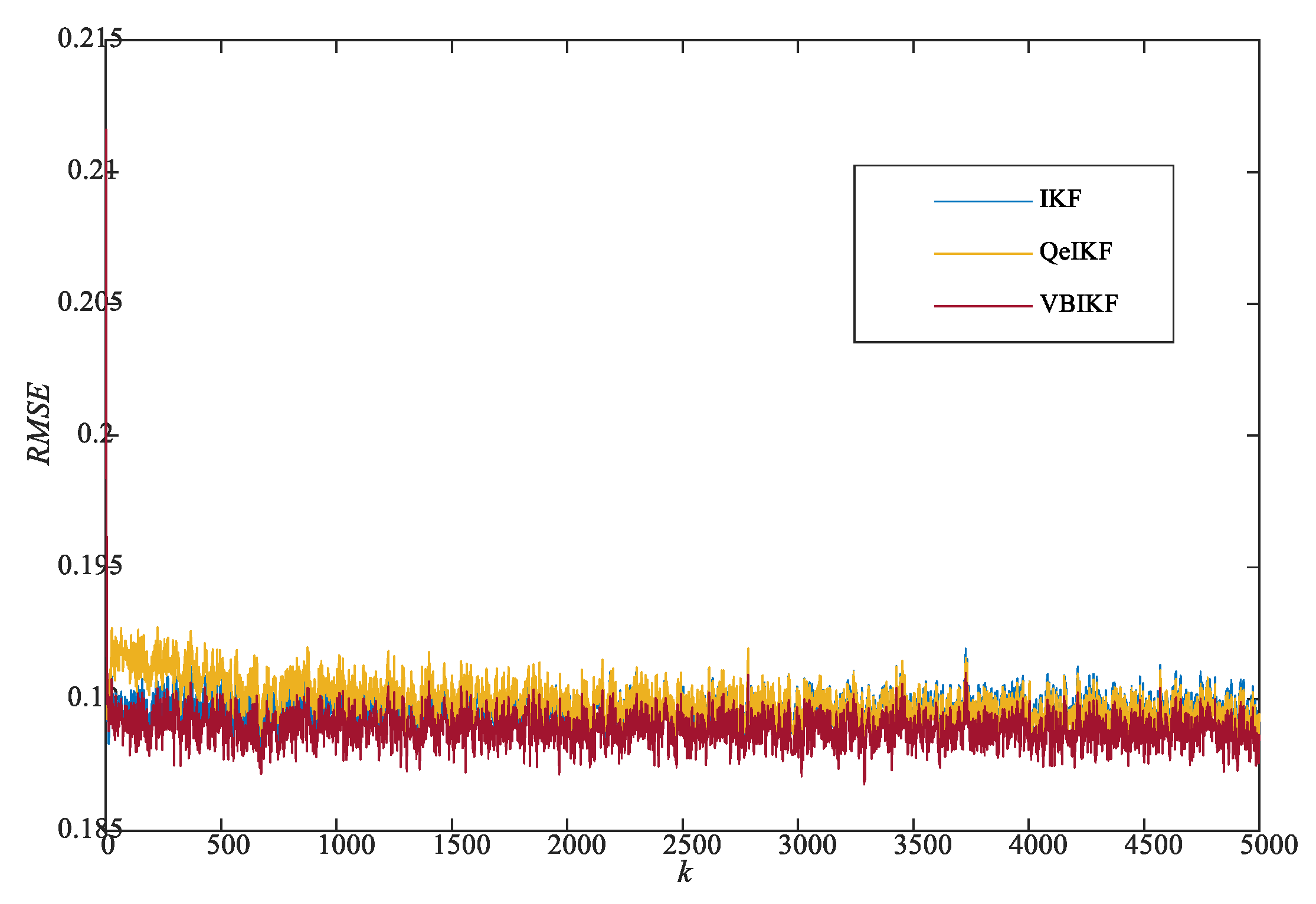
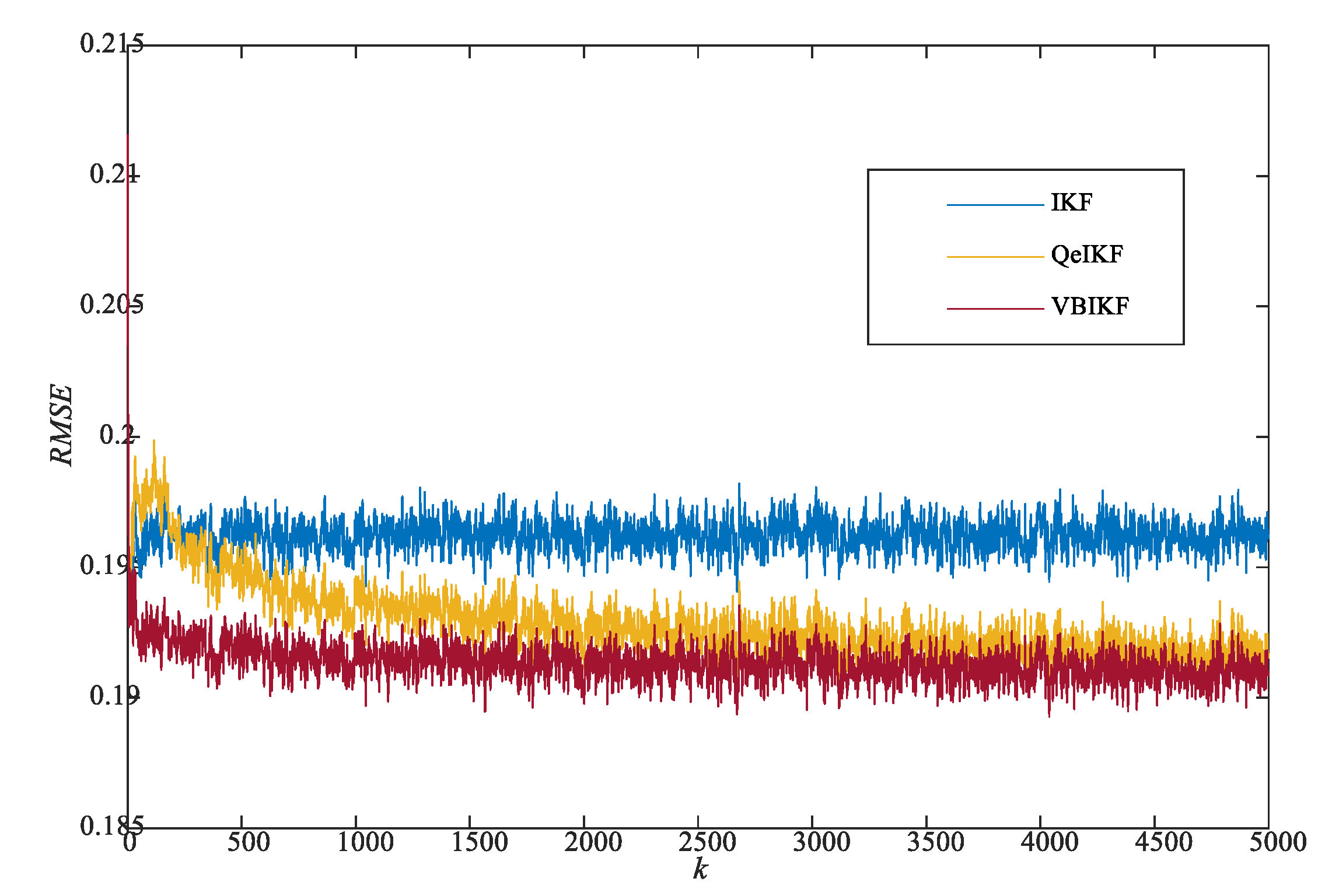
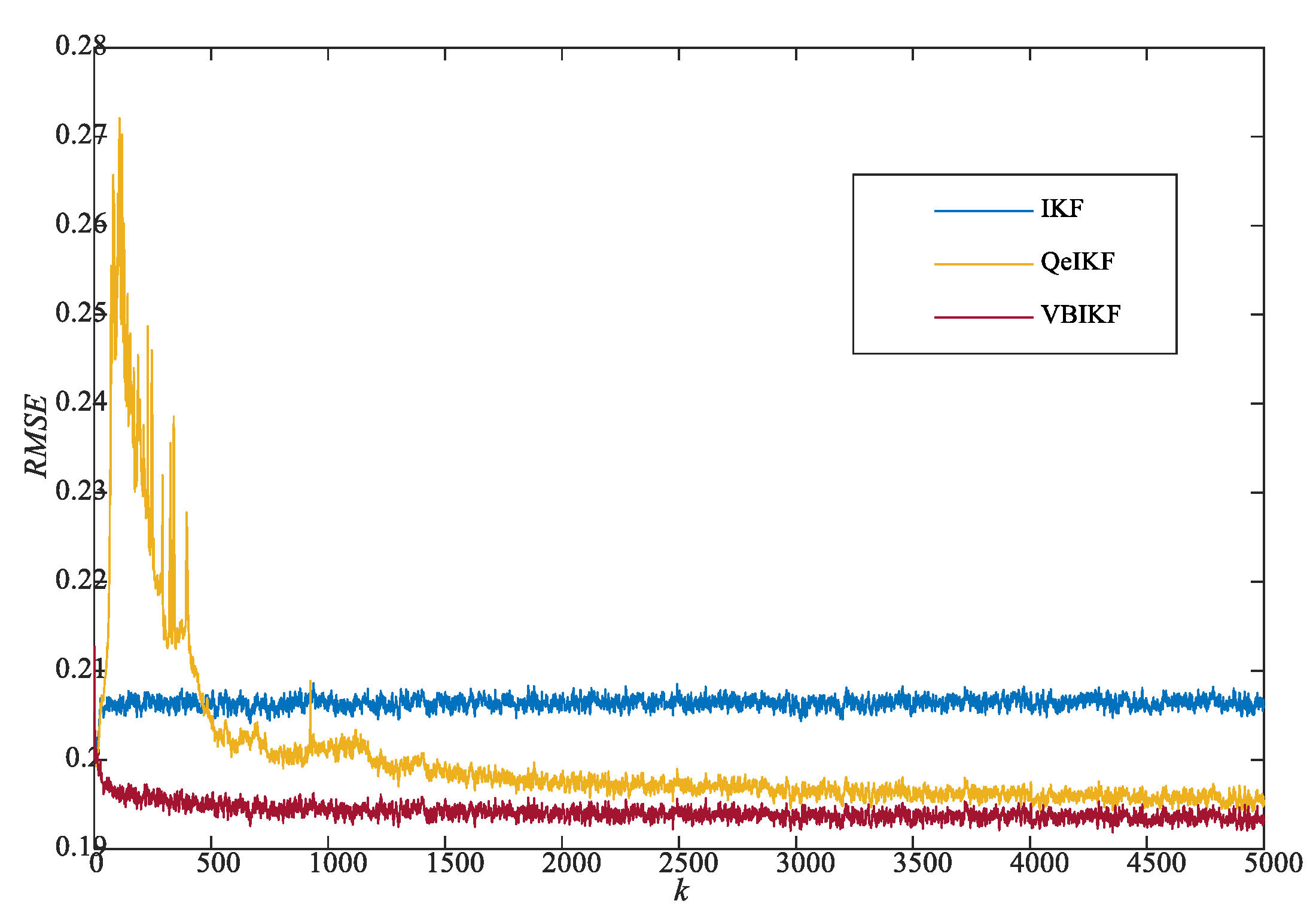
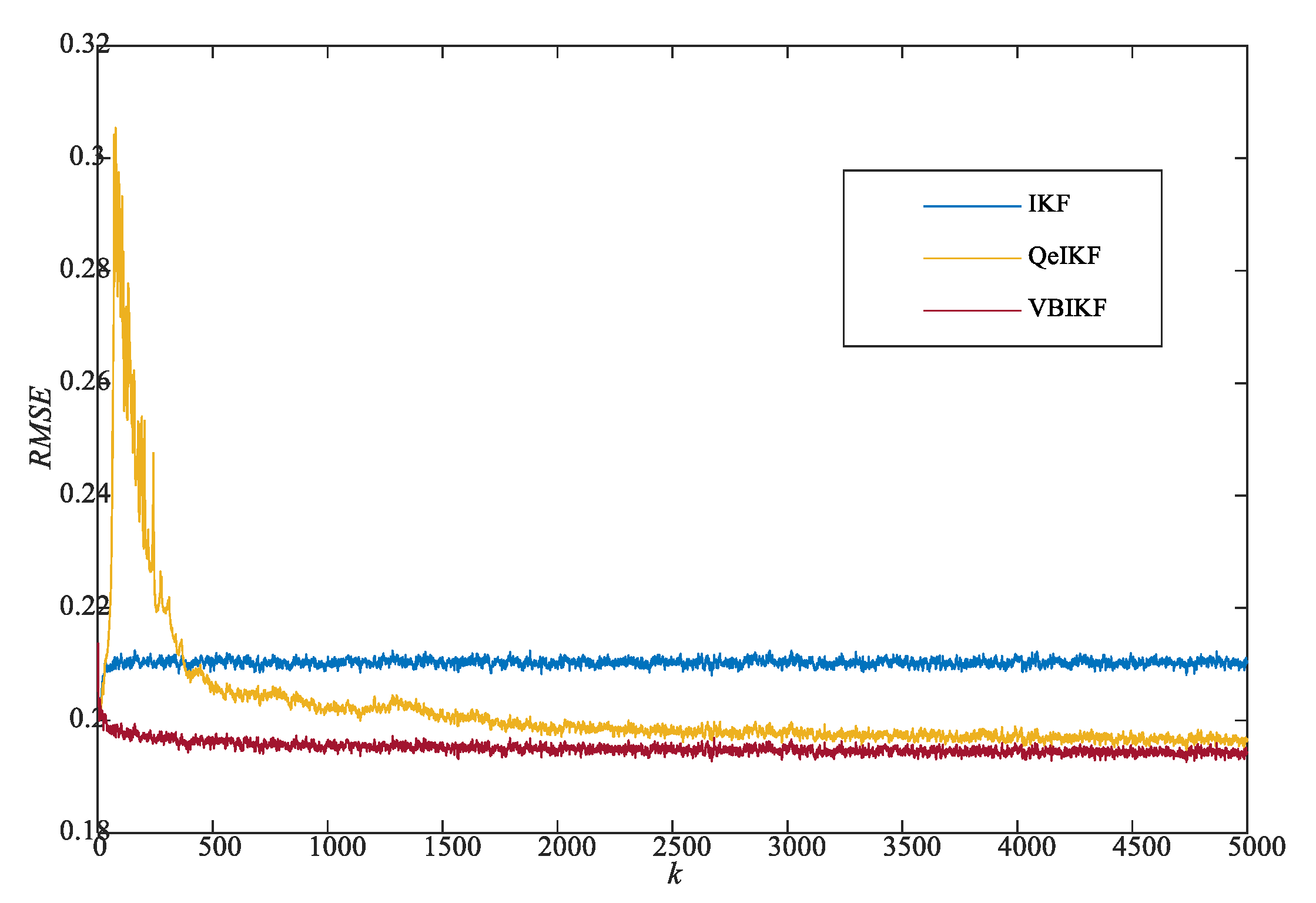
- For all cases of the biased with 1, the presented ARMSE and data clearly demonstrate that the proposed VBIKF not only shows better filtering precision than the QeIKF but its filtering stability is obviously superior to that of QeIKF;
- (3)
- Note that, for the biased with different , although the ARMSE of the proposed VBIKF is still influenced to some extent (i.e., the higher ARMSE value 0.0376 for = 10), the negative influence caused by the inaccurate is significantly reduced compared with and smaller than the 0.0422 of the QeIKF and the 0.443 of the IKF;
- (4)
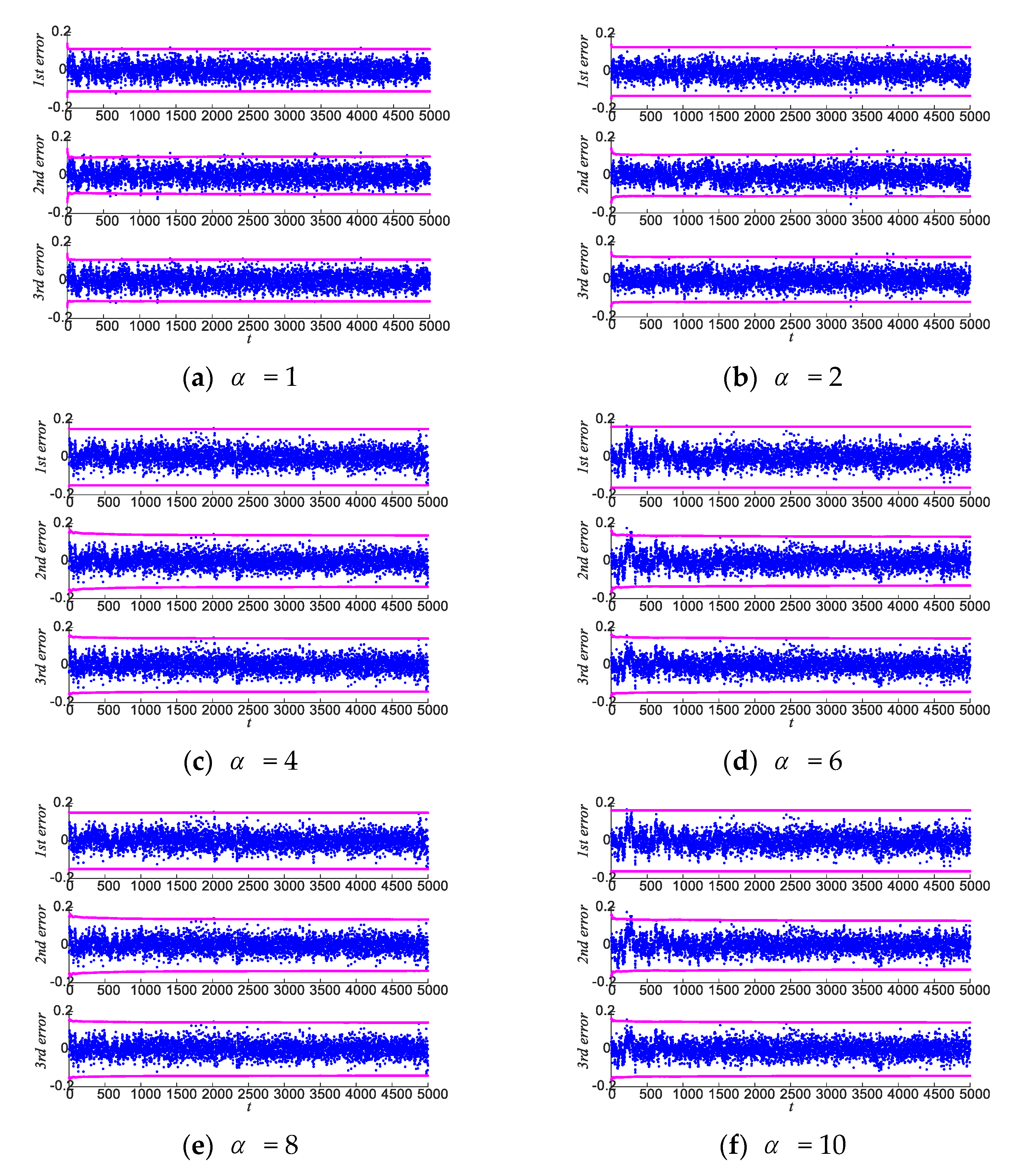
- The respective errors of three elements of with the corresponding 3 boundary for the VBIKF are presented in Figure 8 using the scaled with = 1, 2, 4, 6, 8, and 10, which clearly shows that most of the time estimation errors would fall within the 3 boundary.
- (5)
- As to the computational cost, the usage of extra fixed-point iterations introduces a longer running time than that of the conventional methods. For example, in this work the iteration number N was set to 8 and the average running time was about 6 times that of the conventional IKF. Obviously, an N that is too large is sure to increase the computational cost of the algorithm’s implementation and so a balance between precision and cost should be considered according to the particular application.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, J.; Shan, S. Dot Product Equality Constrained Attitude Determination from Two Vector Observations: Theory and Astronautical Applications. Aerospace 2019, 6, 102. [Google Scholar] [CrossRef] [Green Version]
- Phisannupawong, T.; Kamsing, P.; Torteeka, P.; Channumsin, S.; Sawangwit, U.; Hematulin, W.; Jarawan, T.; Somjit, T.; Yooyen, S.; Delahaye, D.; et al. Vision-Based Spacecraft Pose Estimation via a Deep Convolutional Neural Network for Noncooperative Docking Operations. Aerospace 2020, 7, 126. [Google Scholar] [CrossRef]
- Louédec, M.; Jaulin, L. Interval Extended Kalman Filter-Application to Underwater Localization and Control. Algorithms 2021, 14, 142. [Google Scholar] [CrossRef]
- Soken, H.E.; Sakai, S.-I.; Asamura, K.; Nakamura, Y.; Takashima, T.; Shinohara, I. Filtering-Based Three-Axis Attitude Determination Package for Spinning Spacecraft: Preliminary Results with Arase. Aerospace 2020, 7, 97. [Google Scholar] [CrossRef]
- Li, J.; Wei, X.; Zhang, G. An Extended Kalman Filter-Based Attitude Tracking Algorithm for Star Sensors. Sensors 2017, 17, 1921. [Google Scholar] [CrossRef] [Green Version]
- Pan, C.; Qian, N.; Li, Z.; Gao, J.; Liu, Z.; Shao, K. A Robust Adaptive Cubature Kalman Filter Based on SVD for Dual-Antenna GNSS/MIMU Tightly Coupled Integration. Remote Sens. 2021, 13, 1943. [Google Scholar] [CrossRef]
- Zheng, L.; Zhan, X.; Zhang, X. Nonlinear Complementary Filter for Attitude Estimation by Fusing Inertial Sensors and a Camera. Sensors 2020, 20, 6752. [Google Scholar] [CrossRef]
- Ayala, V.; Román-Flores, H.; Torreblanca Todco, M.; Zapana, E. Observability and Symmetries of Linear Control Systems. Symmetry 2020, 12, 953. [Google Scholar] [CrossRef]
- Deibe, Á.; Antón Nacimiento, J.A.; Cardenal, J.; López Peña, F. A Kalman Filter for Nonlinear Attitude Estimation Using Time Variable Matrices and Quaternions. Sensors 2020, 20, 6731. [Google Scholar] [CrossRef]
- Guo, H.; Liu, H.; Hu, X.; Zhou, Y. A Global Interconnected Observer for Attitude and Gyro Bias Estimation with Vector Measurements. Sensors 2020, 20, 6514. [Google Scholar] [CrossRef]
- Chaturvedi, N.; Sanyal, A.; Mcclamroch, A. Rigid-body attitude control using rotation matrices for continuous singularity-free control laws. IEEE Control Syst. Mag. 2011, 31, 30–51. [Google Scholar]
- Bonnabel, S.; Martin, P.; Salaun, E. Invariant Extended Kalman Filter: Theory and application to a velocity-aided attitude estimation problem. In Proceedings of the 48th IEEE Conference on Decision and Control (CDC) Held jointly with 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009. [Google Scholar] [CrossRef] [Green Version]
- Vasconcelos, J.; Cunha, R.; Silvestre, C.; Oliveira, P. A nonlinear position and attitude observer on SE(3) using landmark measurements. Syst. Control Lett. 2010, 59, 155–166. [Google Scholar] [CrossRef]
- Barrau, A.; Bonnabel, S. Intrinsic filtering on Lie groups with applications to attitude estimation. IEEE Trans. Autom. Contr. 2014, 60, 436–449. [Google Scholar] [CrossRef]
- Barrau, A.; Bonnabel, S. The invariant extended Kalman filter as a stable observer. IEEE Trans. Autom. Contr. 2017, 62, 1797–1812. [Google Scholar] [CrossRef] [Green Version]
- Barrau, A.; Bonnabel, S. Invariant Kalman filtering. Annu. Rev. Control Robot. Auton. Syst. 2018, 1, 237–257. [Google Scholar] [CrossRef]
- Batista, P.; Silvestre, C.; Oliveira, P. A GES attitude observer with single vector observations. Automatica 2012, 49, 388–395. [Google Scholar] [CrossRef]
- Chirikjian, G.; Kobilarov, M. Gaussian approximation of non-linear measurement models on lie groups. In Proceedings of the IEEE Conference on Decision and Control, Osaka, Japan, 15–18 December 2015. [Google Scholar]
- Barfoot, T.; Furgale, P. Associating uncertainty with three-dimensional poses for use in estimation problems. IEEE Trans. Robot. 2014, 30, 679–693. [Google Scholar] [CrossRef]
- Said, S.; Manton, J. Extrinsic mean of Brownian distributions on compact lie groups. IEEE Trans. Inf. Theory 2012, 58, 3521–3535. [Google Scholar] [CrossRef] [Green Version]
- Karasalo, M.; Hu, X. An optimization approach to adaptive Kalman filtering. Automatica 2011, 47, 1785–1793. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Wang, J.; Zhang, D.; Shao, X.; Chen, G. Kalman filtering through the feedback adaption of prior error covariance. Signal Process. 2018, 152, 47–53. [Google Scholar] [CrossRef]
- Feng, B.; Fu, M.; Ma, H.; Xia, Y.; Wang, B. Kalman filter with recursive covariance Estimation-sequentially estimating process noise covariance. IEEE Trans. Ind. Electron. 2014, 61, 6253–6263. [Google Scholar] [CrossRef]
- Zanni, L.; Le Boudec, J.; Cherkaoui, R.; Paolone, M. A prediction-error covariance estimator for adaptive Kalman filtering in step-varying processes: Application to power-system state estimation. IEEE Trans. Contr. Syst. Technol. 2017, 25, 1683–1697. [Google Scholar] [CrossRef] [Green Version]
- Mohamed, A.; Schwarz, K. Adaptive Kalman Filtering for INS/GPS. J. Geod. 1999, 73, 193–203. [Google Scholar] [CrossRef]
- Ardeshiri, T.; Özkan, E.; Orguner, U.; Gustafsson, F. Approximate Bayesian smoothing with unknown process and measurement noise covariance. IEEE Signal Process. Lett. 2015, 22, 2450–2454. [Google Scholar] [CrossRef] [Green Version]
- Assa, A.; Plataniotinos, K. Adptive Kalman filtering by covariance sampling. IEEE Signal Process. Lett. 2017, 24, 1288–1292. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Y.; Wu, Z.; Li, N.; Chambers, J. A novel adaptive Kalman filter with inaccurate process and measurement noise covariance matrices. IEEE Trans. Autom. Contr. 2018, 63, 594–601. [Google Scholar] [CrossRef] [Green Version]
- Ćesić, J.; Markovi, I.; Petrovi, I. Mixture Reduction on Matrix Lie Groups. IEEE Signal Process. Lett. 2017, 24, 1719–1723. [Google Scholar] [CrossRef] [Green Version]
- Ćesić, J.; Markovi, I.; Bukal, M.; Petrović, I. Extended Information Filter on Matrix Lie Groups. Automatica 2017, 82, 226–234. [Google Scholar] [CrossRef]
- Kang, D.; Jang, C.; Park, F. Unscented Kalman Filtering for Simultaneous Estimation of Attitude and Gyroscope Bias. IEEE/ASME Trans. Mechatron. 2019, 24, 350–360. [Google Scholar] [CrossRef]
- Bourmaud, G.; Mégret, R.; Arnaudon, M.; Giremus, A. Continuous-Discrete Extended Kalman Filter on Matrix Lie Groups Using Concentrated Gaussian Distributions. J. Math. Imaging Vis. 2015, 51, 209–228. [Google Scholar] [CrossRef] [Green Version]
- Tzikas, D.; Likas, A.; Galatsanos, N. The Variational Approximation for Bayesian Inference. IEEE Signal Process. Mag. 2008, 25, 131–146. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IKF | QeIKF | Proposed VBIKF | |
|---|---|---|---|
| 0.0353 | 0.0359 | 0.0356 | |
| 0.0361 | 0.0364 | 0.0358 | |
| 0.0386 | 0.0387 | 0.0365 | |
| 0.0408 | 0.0403 | 0.0369 | |
| 0.0427 | 0.0413 | 0.0373 | |
| 0.0443 | 0.0422 | 0.0376 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Chen, Z. Variational Bayesian Iteration-Based Invariant Kalman Filter for Attitude Estimation on Matrix Lie Groups. Aerospace 2021, 8, 246. https://doi.org/10.3390/aerospace8090246
Wang J, Chen Z. Variational Bayesian Iteration-Based Invariant Kalman Filter for Attitude Estimation on Matrix Lie Groups. Aerospace. 2021; 8(9):246. https://doi.org/10.3390/aerospace8090246
Chicago/Turabian StyleWang, Jiaolong, and Zeyang Chen. 2021. "Variational Bayesian Iteration-Based Invariant Kalman Filter for Attitude Estimation on Matrix Lie Groups" Aerospace 8, no. 9: 246. https://doi.org/10.3390/aerospace8090246
APA StyleWang, J., & Chen, Z. (2021). Variational Bayesian Iteration-Based Invariant Kalman Filter for Attitude Estimation on Matrix Lie Groups. Aerospace, 8(9), 246. https://doi.org/10.3390/aerospace8090246