
VHF Omnidirectional Range (VOR) Experimental Positioning for Stratospheric Vehicles


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. VHF Omnidirectional Range (VOR)
- At signal reception, the receiver discriminates two different sub-modulated signals, namely, an AM sub-modulated reference sine wave and a FM sub-modulated directional sine-wave;
- The two sub-modulated sine waves are independently de-modulated and brought back to base band, at 30 Hz;
- The phase of the two signals is then compared and the obtained value is re-scaled as an angle (with values between 0 and 360 degrees);
- The radial information is the obtained value.
2.2. STRATONAV Experiment and Data Collection Processes
- A COTS (Commercial Off The Shelf) portable VOR receiver, able to autonomously receive and decode the signal and to show the calculated radial on the screen. This receiver was modified by the team in order to be able to tune in the different VOR frequencies and to externally log the detected radials. This receiver will be referred as “COTS receiver” from now on;
- A Software Defined Radio (SDR) able to scan and record the frequencies of interest (from 108 MHz to 118 MHz). The recorded raw data was saved on a Solid State Drive (SSD) and post-processed after the experiment recovery after landing. This device will be referred from now on as “SDR receiver” in the paper.
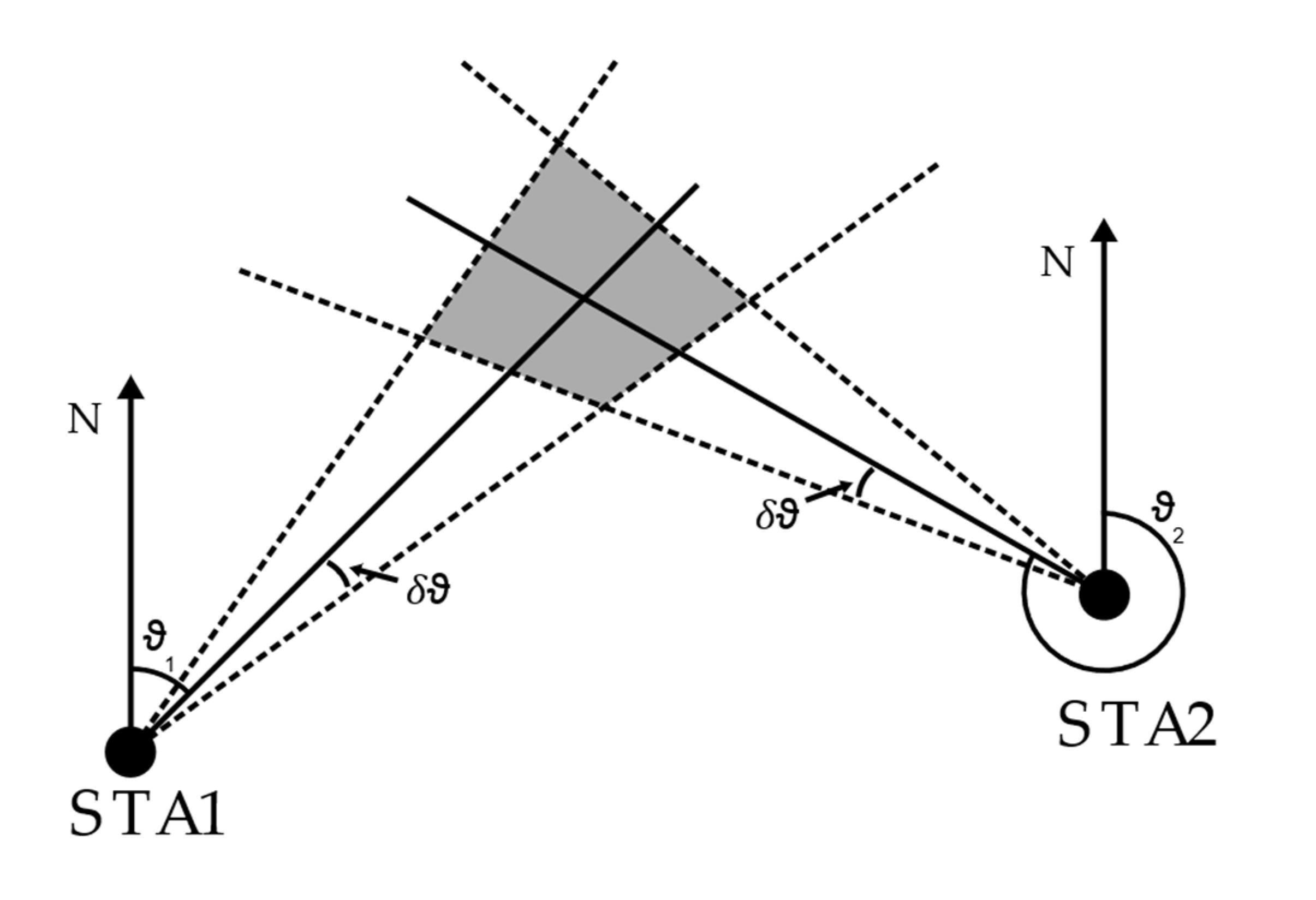
2.3. VOR-Based Ground Track Determination
3. Results
3.1. COTS Receiver Data
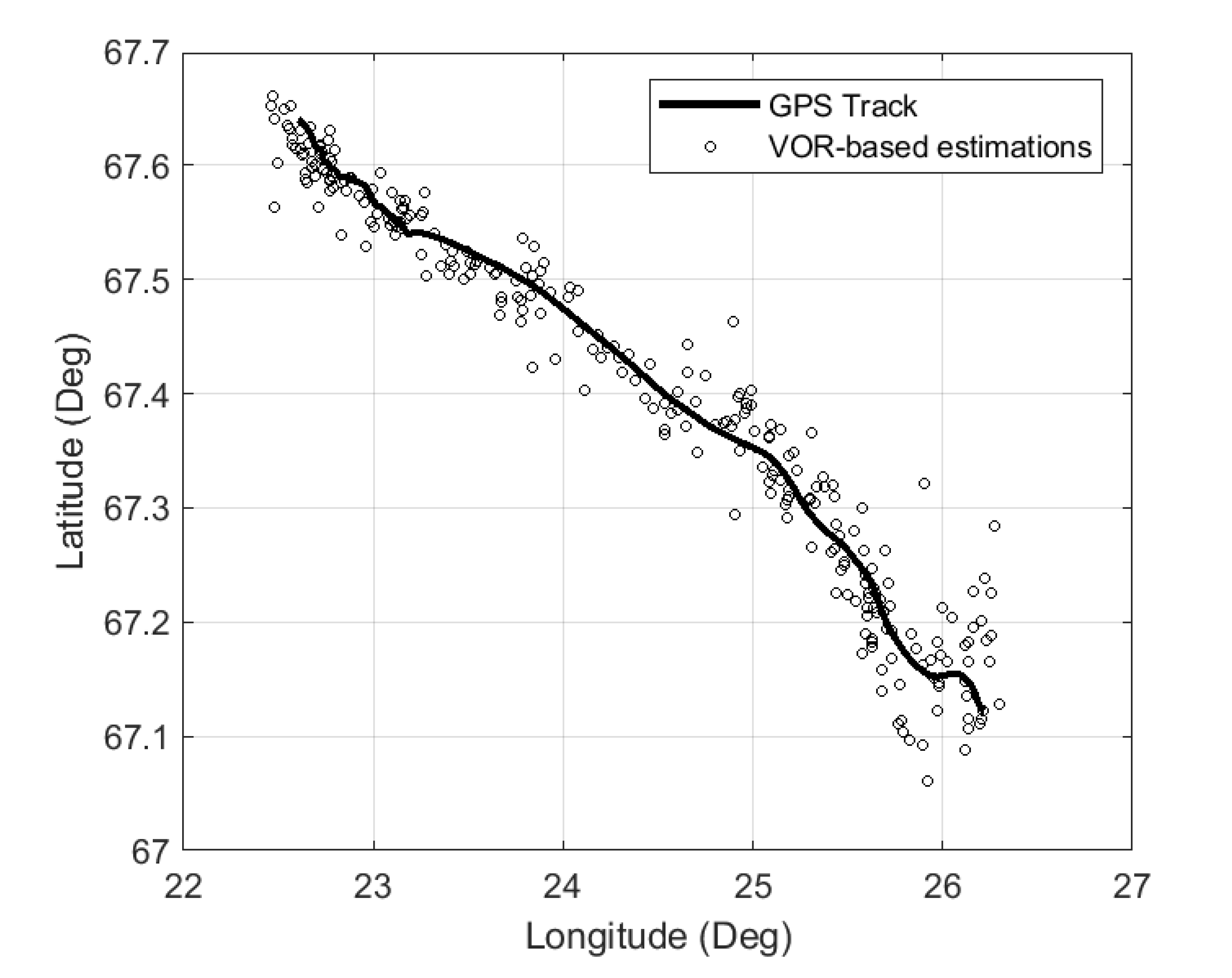
3.2. SDR Data Positioning
- Increased sample rate of the VOR data;
- Concurrent reception of more than one station;
- Tunable receiver settings.
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gonzalo, J.; López, D.; Domínguez, D.; García, A.; Escapa, A. On the Capabilities and Limitations of High Altitude Pseudo-Satellites. Prog. Aerosp. Sci. 2018, 98, 37–56. [Google Scholar] [CrossRef]
- Santoro, F.; Del Bianco, A.; Viola, N.; Fusaro, R.; Albino, V.; Binetti, M.; Marzioli, P. Spaceport and Ground Segment Assessment for Enabling Operations of Suborbital Transportation Systems in the Italian Territory. Acta Astronaut. 2018, 152, 396–407. [Google Scholar] [CrossRef]
- van Wynsberghe, E.; Turak, A. Station-Keeping of a High-Altitude Balloon with Electric Propulsion and Wireless Power Transmission: A Concept Study. Acta Astronaut. 2016, 128, 616–627. [Google Scholar] [CrossRef]
- Konefal, T.; Tozer, T.C.; Thornton, J.; Grace, D.; Spillard, C. Broadband Communications from a High-Altitude Platform: The European HeliNet Programme. Electron. Commun. Eng. J. 2001, 13, 138–144. [Google Scholar] [CrossRef]
- Tozer, T.C.; Grace, D. High-Altitude Platforms for Wireless Communications. Electron. Commun. Eng. J. 2001, 13, 127–137. [Google Scholar] [CrossRef] [Green Version]
- Alam, M.I.; Pant, R.S. Multi-Objective Multidisciplinary Design Analyses and Optimization of High Altitude Airships. Aerosp. Sci. Technol. 2018, 78, 248–259. [Google Scholar] [CrossRef]
- Du, H.; Lv, M.; Zhang, L.; Zhu, W.; Wu, Y.; Li, J. Energy Management Strategy Design and Station-Keeping Strategy Optimization for High Altitude Balloon with Altitude Control System. Aerosp. Sci. Technol. 2019, 93, 105342. [Google Scholar] [CrossRef]
- Aragón-Zavala, A.; Cuevas-Ruiz, J.L.; Delgado-Penín, J.A. High-Altitude Platforms for Wireless Communications; Wiley: Chichester, UK, 2008; ISBN 978-0-470-51061-2. [Google Scholar]
- Gao, Z.; Ge, M.; Li, Y.; Shen, W.; Zhang, H.; Schuh, H. Railway Irregularity Measuring Using Rauch–Tung–Striebel Smoothed Multi-Sensors Fusion System: Quad-GNSS PPP, IMU, Odometer, and Track Gauge. GPS Solut. 2018, 22, 36. [Google Scholar] [CrossRef]
- Liu, W.; Shi, X.; Zhu, F.; Tao, X.; Wang, F. Quality Analysis of Multi-GNSS Raw Observations and a Velocity-Aided Positioning Approach Based on Smartphones. Adv. Space Res. 2019, 63, 2358–2377. [Google Scholar] [CrossRef]
- Specht, C.; Weintrit, A.; Specht, M. A History of Maritime Radio-Navigation Positioning Systems Used in Poland. J. Navig. 2016, 69, 468–480. [Google Scholar] [CrossRef] [Green Version]
- International Civil Aviation Organization (ICAO). Annex 10—Aeronautical Telecommunications; ICAO: Montréal, QC, Canada, 2001; Volume I. [Google Scholar]
- International Civil Aviation Organization (ICAO). Navigation Roadmap; ICAO Workshop on PBN Airspace Redesign and GNSS Implementation Supporting PBN; ICAO: Montréal, QC, Canada, 2012. [Google Scholar]
- Anderson, W.G. The Accuracy of the VHF Omni-Range System of Aircraft Navigation; A Statistical Study. IRE Trans. Aeronaut. Navig. Electron. 1955, ANE-2, 25–37. [Google Scholar] [CrossRef]
- REXUS. BEXUS Programme Official Website: BEXUS Projects. Available online: http://rexusbexus.net/bexus/ (accessed on 8 August 2021).
- Marzioli, P.; Frezza, L.; Curianò, F.; Pellegrino, A.; Gianfermo, A.; Angeletti, F.; Arena, L.; Cardona, T.; Valdatta, M.; Santoni, F.; et al. Experimental Validation of VOR (VHF Omni Range) Navigation System for Stratospheric Flight. Acta Astronaut. 2021, 178, 423–431. [Google Scholar] [CrossRef]
- European Organization for Civil Aviation Electronics. EuroCAE ED-52: Minimum Operational Performance Specification (MPS) for Ground Conventional and Doppler Very High Frequency Omni Range (CVOR and DVOR) Equipment; EuroCAE: Saint-Denis, France, 1984. [Google Scholar]
- Moir, I.; Seabridge, A.G. Aircraft Systems: Mechanical, Electrical and Avionics Subsystems Integration, 3rd ed.; John Wiley & Sons Inc.: Chichester, UK; Hoboken, NJ, USA, 2008; ISBN 978-0-470-05996-8. [Google Scholar]
- Marzioli, P.; Curianò, F.; Pellegrino, A.; Angeletti, F.; Frezza, L.; Gianfermo, A.; Valdatta, M.; Arena, L.; Cardona, T. Testing VOR Performances in the Stratosphere: The STRATONAV Experiment (Paper Code: IAC-16,B2,2,7,X34462). In Proceedings of the 68th International Astronautical Congress, Guadalajara, Mexico, 26–30 September 2016. [Google Scholar]
- Pastore, R.; Delfini, A.; Micheli, D.; Vricella, A.; Marchetti, M.; Santoni, F.; Piergentili, F. Carbon Foam Electromagnetic Mm-Wave Absorption in Reverberation Chamber. Carbon 2019, 144, 63–71. [Google Scholar] [CrossRef]
- Piattoni, J.; Ceruti, A.; Piergentili, F. Automated Image Analysis for Space Debris Identification and Astrometric Measurements. Acta Astronaut. 2014, 103, 176–184. [Google Scholar] [CrossRef]
- Candini, G.P.; Piergentili, F.; Santoni, F. Designing, Manufacturing, and Testing a Self-Contained and Autonomous Nanospacecraft Attitude Control System. J. Aerosp. Eng. 2014, 27, 04014033. [Google Scholar] [CrossRef]
- Piergentili, F.; Candini, G.P.; Zannoni, M. Design, Manufacturing, and Test of a Real-Time, Three-Axis Magnetic Field Simulator. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1369–1379. [Google Scholar] [CrossRef]
- Santoni, F.; Piergentili, F.; Graziani, F. The UNISAT Program: Lessons Learned and Achieved Results. Acta Astronaut. 2009, 65, 54–60. [Google Scholar] [CrossRef]
- Santoni, F.; Piergentili, F.; Bulgarelli, F.; Graziani, F. UNISAT-3 Power System. In Proceedings of the European Space Agency, (Special Publication) ESA SP, Stresa, Italy, 9 May 2015; pp. 395–400. [Google Scholar]
- Marzioli, P.; Gugliermetti, L.; Santoni, F.; Delfini, A.; Piergentili, F.; Nardi, L.; Metelli, G.; Benvenuto, E.; Massa, S.; Bennici, E. CultCube: Experiments in Autonomous in-Orbit Cultivation on-Board a 12-Units CubeSat Platform. Life Sci. Space Res. 2020, 25, 42–52. [Google Scholar] [CrossRef]
- Santoni, F.; Gugliermetti, L.; Piras, G.; De Pascale, S.; Pannico, A.; Piergentili, F.; Marzioli, P.; Frezza, L.; Amadio, D.; Gianfermo, A.; et al. GreenCube: Microgreens Cultivation and Growth Monitoring on-Board a 3U CubeSat. In Proceedings of the 2020 IEEE 7th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Pisa, Italy, 22–24 June 2020; pp. 130–135. [Google Scholar]
- ADAFRUIT Adafruit GPS Breakout Datasheet. Available online: https://cdn-learn.adafruit.com/downloads/pdf/adafruit-ultimate-gps.pdf (accessed on 31 August 2021).
- Finavia Finland Aeronautical Information Publication (AIP). Available online: https://ais.fi/C-en (accessed on 8 August 2021).
- LFV—Swedish National Entity for Flight Assistance Aeronautical Information Publications (AIPs) for Instrumental Flight Rules (IFR) in Sweden. Available online: https://www.aro.lfv.se/ (accessed on 8 August 2021).
- AVINOR—Norway National Entity for Flight Assistance Aeronautical Information Publications (AIPs) for Instrumental Flight Rules (IFR) in Norway. Available online: https://www.ippc.no/norway_aip/current/main_en.html (accessed on 8 August 2021).
- di Palo, L.; Bandini, V.; Bedetti, E.; Broggi, G.; Collettini, L.; Celesti, P.; Ienno, D.D.; Garofalo, R.; Iovanna, F.; Mattei, G.; et al. Stratospheric Balloon Attitude and Position Determination System Based on the VHF Omnidirectional Range Signal Processing: TARDIS Experiment. In Proceedings of the 2019 IEEE 5th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Rome, Italy, 20–22 June 2019; pp. 607–612. [Google Scholar]
- di Palo, L.; Garofalo, R.; Bedetti, E.; Celesti, P.; Iovanna, F.; Frezza, L.; Marzioli, P.; Piergentili, F.; Volpe, A.; Curianò, F.; et al. Time Difference of Arrival for Stratospheric Balloon Tracking: Design and Development of the STRAINS Experiment. In Proceedings of the 2020 IEEE 7th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Pisa, Italy, 22–24 June 2020; pp. 362–366. [Google Scholar]
- Frezza, L.; Marzioli, P.; Curianò, F.; Gugliermetti, L.; Amadio, D.; Pirrotta, S.; Kimani, J.N.; Mwita, P.; Mwaniki, C.; Santoni, F. From 1KUNS-PF to WildTrackCube-SIMBA: Strengthening the Cooperation between Italy and Kenya in Nano-Satellite Manufacturing and Operations. In Proceedings of the 71st International Astronautical Congress—The Cyberspace Edition, Held Virtually, 12–14 October 2020. [Google Scholar]
- Ken Ward Discontinuation of VOR Service, April 2012. Available online: https://www.faa.gov/air_traffic/flight_info/aeronav/acf/media/Presentations/12-01_Discon-of-VOR-update.pdf (accessed on 14 September 2021).






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Frezza, L.; Marzioli, P.; Santoni, F.; Piergentili, F. VHF Omnidirectional Range (VOR) Experimental Positioning for Stratospheric Vehicles. Aerospace 2021, 8, 263. https://doi.org/10.3390/aerospace8090263
Frezza L, Marzioli P, Santoni F, Piergentili F. VHF Omnidirectional Range (VOR) Experimental Positioning for Stratospheric Vehicles. Aerospace. 2021; 8(9):263. https://doi.org/10.3390/aerospace8090263
Chicago/Turabian StyleFrezza, Lorenzo, Paolo Marzioli, Fabio Santoni, and Fabrizio Piergentili. 2021. "VHF Omnidirectional Range (VOR) Experimental Positioning for Stratospheric Vehicles" Aerospace 8, no. 9: 263. https://doi.org/10.3390/aerospace8090263