
Dynamic Prediction of Air Traffic Situation in Large-Scale Airspace


Abstract
1. Introduction
- A type of operational data that more accurately reflects the controller’s workload, i.e., flow control data, was used to accomplish a rapid calibration of air traffic situations.
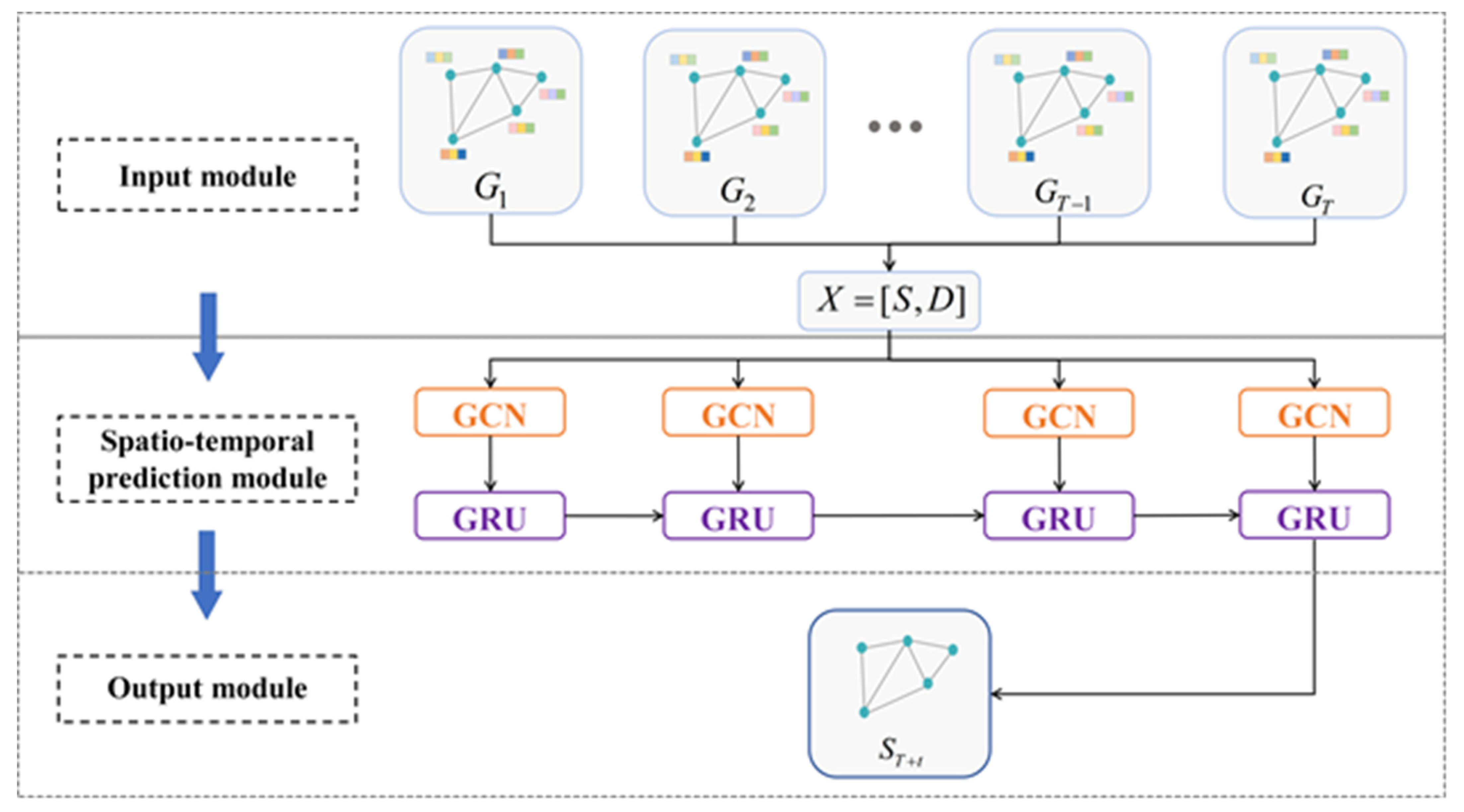
- Considering the spatial and temporal correlation between sectors, the scope of the study is not limited to a single sector. A large-scale airspace operational situation prediction model is established based on the GCN. The prediction results can reflect the characteristics of the changes in the operational status of large-scale airspace, which can provide a decision basis for optimizing the traffic flow and sector resource allocation.
2. Air Traffic Situation Assessment and Prediction
2.1. Air Traffic Situational Assessment Method
2.2. Air Traffic Situation Prediction Problem
3. Air Traffic Situation Prediction Model Based on GCN
4. Experiment
4.1. Dataset
- Adjacency matrixThe Shanghai control area contains 30 sectors. The adjacency matrix was constructed based on whether there was a route connection between the sectors. If there was a route connection between sector and sector , ; otherwise, . The adjacency matrix was obtained through statistics.
- Airspace traffic situation dataFirst, based on the daily traffic volume statistics and flow control information of each sector in Shanghai from 4 August 2018 to 31 October 2018, the free state periods and saturation state periods of each sector were determined. Second, the remaining unmarked periods were used as intermediate states. Third, the sample states of each sector were marked in 15-min time slices. The reason for marking the sector traffic situation in 15-min time slices is that air traffic management departments often use 15-min time slices to measure the sector’s operational status and develop and implement traffic control strategies. Furthermore, this paper focuses on the air traffic situation in the sector rather than the operational status changes of specific aircrafts, so a shorter time unit is not chosen. The obtained state dataset of each sector contained a total of 8544 data for 89 days (96 × 89). The data of all sectors were further combined to obtain the feature matrix .
- Sector traffic volume dataBased on the radar trajectory data from 4 August 2018 to 31 October 2018, the sector traffic volume information was counted in 15-min time slices. The traffic volume dataset of each sector contained a total of 8544 (96 × 89) data for 89 days, and the dynamic feature matrix for 30 sectors was obtained.
4.2. Parameter Setting
- The range of the number of GRU units is generally chosen as an exponent of 2. The range of the number of GRU units was set to (8, 16, 32, 64, 100, 128) in the experiments of this study. The experimental effects of different numbers of GRU units were tested by fixing the number of model training epochs to 500 and the training step size to 16, as shown in Figure 7b. The experimental results revealed that the model training effect tended to be stable when the number of GRU units was 100; thus, the number of model training GRU units was set to 100.
- The range of model training epochs was set to (500, 1000, 1500, 2000, 3000, 3500). The experimental effect of different training epochs was tested when the training step was 16 and the number of GRU units was 100, and the results are shown in Figure 7c. The experimental results revealed that the model training results tended to be stable when the number of model training rounds reached 3000; thus, the number of model training epochs was set to 3000.
4.3. Experimental Results
- The STGCN model has a high prediction accuracy. The prediction accuracy of the STGCN model for the future 15 min, 30 min, 45 min, and 60 min is above 90%; the prediction accuracy of benchmark models such as HA, SVR, LSTM, and GRU is above 80%; and the prediction accuracy of the ARIMA model is relatively low, i.e., approximately 27%. The experimental results fully demonstrate the predictive advantages of the STGCN model.
- The STGCN model has an excellent long-term predictive ability. Further analysis of the STGCN model prediction accuracy for the future 15 min, 30 min, 45 min, and 60 min revealed that the model prediction accuracy is the highest when the prediction time step is 15-min (92.00%). The model prediction accuracy decreases slightly when the model prediction time step is 60-min (90.70%). However, the overall model prediction accuracy is above 90%.
- The STGCN model has excellent spatiotemporal prediction performance. The prediction performance of two benchmark models, LSTM and GRU, were compared with STGCN. The highest prediction accuracies of the LSTM, GRU, and STGCN models are 87.5%, 89.40%, and 92.00%, respectively. The prediction performance of the GRU model is better than that of the LSTM model; however, the overall prediction accuracy of both the GRU and LSTM models is lower than that of the STGCN model. This indicates that compared with the traditional time series prediction models, the STGCN model effectively learns the spatial structural features between sectors through the GCN to achieve more accurate situation prediction results.
- The STGCN model effectively improves the model prediction accuracy by merging dynamic features. Comparing the prediction accuracy of the STGCN model and the STGCN-nef model for the future 15 min, 30 min, 45 min, and 60 min changes in the situation revealed that the STGCN model outperforms the STGCN-nef model for multiple time steps. This shows that the STGCN model effectively improves the prediction by merging the dynamic features of traffic volume.
5. Conclusions
- Rapid calibration of the air traffic situation using flow control data accurately reflects the controller’s workload. Three sector operational states—a free state, saturated state, and intermediate state—were defined by combining traffic statistics and flow control information. This effectively solves the difficulty of obtaining a large number of labeled samples. However, the intermediate state samples are currently not defined with a specific saturation degree. In the future, we will continue to refine the saturation degree of the intermediate state to increase the accuracy of the airspace operation status prediction results.
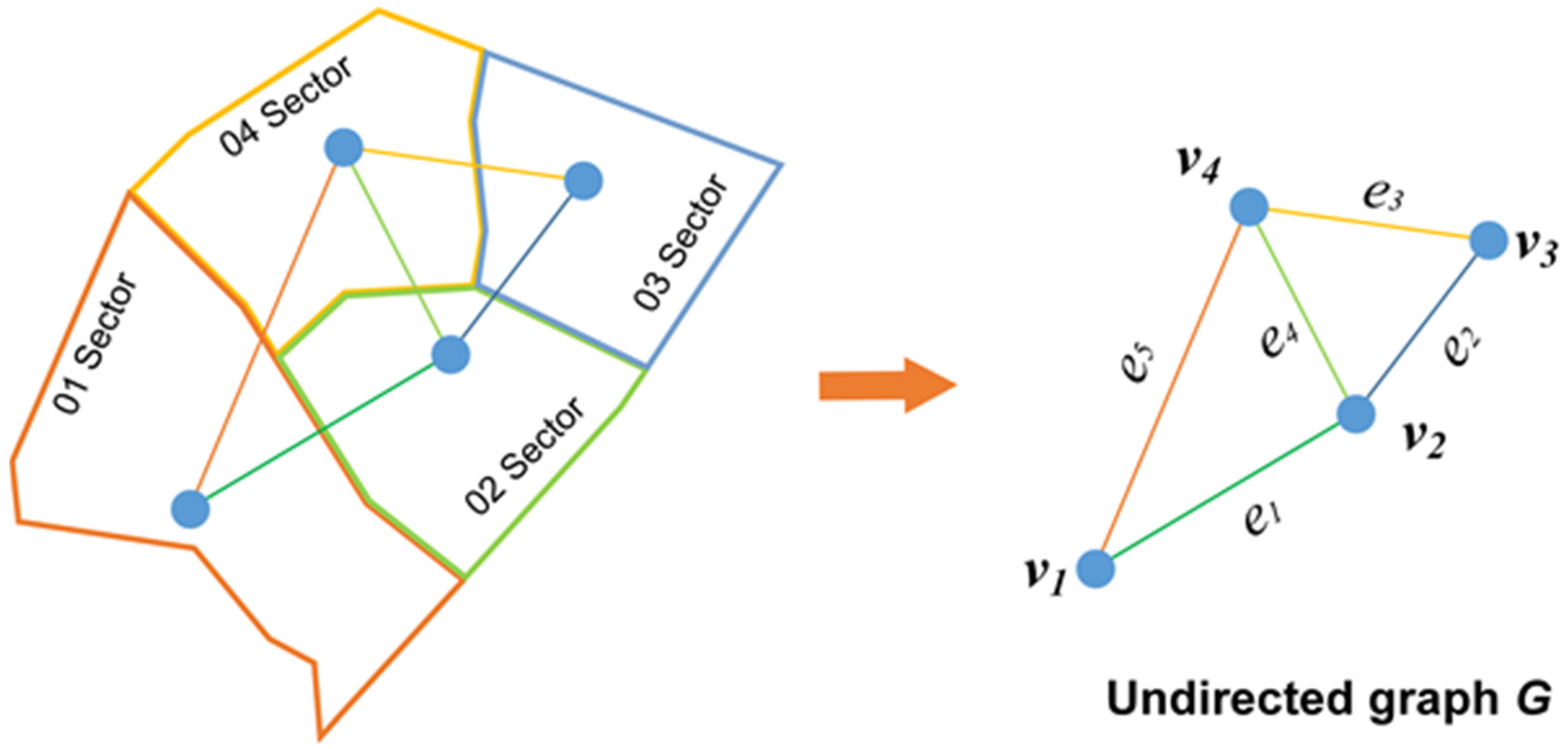
- By abstracting the airspace network as an undirected graph, the STGCN is constructed to predict the changing characteristics of the air traffic situation in large-scale airspace. The experimental results in 30 sectors within the Shanghai control area show that the prediction effect of the STGCN model is significantly better than that of the traditional temporal prediction model. It proves that the GCN can effectively capture the interaction relationships between sectors and achieve more accurate situational predictions. In the future, we will continue to refine the construction of a large-scale airspace network and try to abstract it as a directed graph. We will also attempt to introduce an attention mechanism in STGCN to improve its prediction performance.
- The STGCN model has an average prediction accuracy of more than 90% for the future situation within 1 h, which indicates a good long-term predictive ability. In comparison with other benchmark methods, the STGCN model has significant advantages and can be applied to the prediction of multi-sector airspace operations in large regional control centers.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Delahaye, D.; Puechmorel, S. Air traffic complexity based on dynamical systems. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 2069–2074. [Google Scholar]
- Lee, K.; Feron, E.; Pritchett, A. Describing airspace complexity: Airspace response to disturbances. J. Guid. Control Dyn. 2009, 32, 210–222. [Google Scholar] [CrossRef]
- Djokic, J.; Lorenz, B.; Fricke, H. Air traffic control complexity as workload driver. Transp. Res. Part C Emerg. Technol. 2010, 18, 930–936. [Google Scholar] [CrossRef]
- Laudeman, I.V.; Shelden, S.G.; Branstrom, R.; Brasil, C. Dynamic Density: An Air Traffic Management Metric; NASA: Washington, DC, USA, 1998. [Google Scholar]
- Delahaye, D.; Paimblanc, P.; Puechmorel, S.; Histon, J.; Hansman, R. A new air traffic complexity metric based on dynamical system modelization. In Proceedings of the 21st Digital Avionics Systems Conference, Irvine, CA, USA, 27–31 October 2002; p. 4A2. [Google Scholar]
- Gianazza, D. Airspace configuration using air traffic complexity metrics. In Proceedings of the ATM 2007, 7th USA/Europe Air Traffic Management Research and Developpment Seminar, Barcelona, Spain, 2–5 July 2007; pp. 1–11. [Google Scholar]
- Prandini, M.; Putta, V.; Hu, J. A probabilistic measure of air traffic complexity in 3-D airspace. Int. J. Adapt. Control Signal Process. 2010, 24, 813–829. [Google Scholar] [CrossRef]
- Delahaye, D.; Puechmorel, S. Air Traffic Complexity: Towards an Intrinsic Metric. In Proceedings of the 3rd USA/Europe Air Traffic Management R and D Seminar, Napoli, Italy, 13–16 June 2000. [Google Scholar]
- Gianazza, D.; Guittet, K. Selection and evaluation of air traffic complexity metrics. In Proceedings of the 2006 IEEE/AIAA 25TH Digital Avionics Systems Conference, Portland, OR, USA, 15–18 October 2006; pp. 1–12. [Google Scholar]
- Gianazza, D.; Guittet, K. Evaluation of air traffic complexity metrics using neural networks and sector status. In Proceedings of the 2nd International Conference on Research in Air Transportation, ICRAT, Portland, OR, USA, 15–18 October 2006; pp. 126–136. [Google Scholar]
- Xiao, M.; Zhang, J.; Cai, K.; Cao, X. ATCEM: A synthetic model for evaluating air traffic complexity. J. Adv. Transp. 2016, 50, 315–325. [Google Scholar] [CrossRef]
- Zhu, X.; Cai, K.; Cao, X. A semi-supervised learning method for air traffic complexity evaluation. In Proceedings of the 2017 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 18–20 April 2017; pp. 1A3-1–1A3-11. [Google Scholar]
- Cao, X.; Zhu, X.; Tian, Z.; Chen, J.; Wu, D.; Du, W. A knowledge-transfer-based learning framework for airspace operation complexity evaluation. Transp. Res. Part C Emerg. Technol. 2018, 95, 61–81. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhu, X.; Zhu, S.; Zhang, M.; Du, W. Unsupervised evaluation of airspace complexity based on kernel principal component analysis. Acta Aeronaut. Astronaut. Sin. 2019, 8, 241–247. [Google Scholar]
- Liu, H.; Lin, Y.; Chen, Z.; Guo, D.; Zhang, J.; Jing, H. Research on the air traffic flow prediction using a deep learning approach. IEEE Access 2019, 7, 148019–148030. [Google Scholar] [CrossRef]
- Gui, G.; Zhou, Z.; Wang, J.; Liu, F.; Sun, J. Machine learning aided air traffic flow analysis based on aviation big data. IEEE Trans. Veh. Technol. 2020, 69, 4817–4826. [Google Scholar] [CrossRef]
- Bai, J.; Zhu, J.; Song, Y.; Zhao, L.; Hou, Z.; Du, R.; Li, H. A3t-gcn: Attention temporal graph convolutional network for traffic forecasting. ISPRS Int. J. Geo-Inf. 2021, 10, 485. [Google Scholar] [CrossRef]
- Guo, S.; Lin, Y.; Feng, N.; Song, C.; Wan, H. Attention based spatial-temporal graph convolutional networks for traffic flow forecasting. In Proceedings of the AAAI Conference on Artificial Intelligence, Honolulu, HI, USA, 27 January–1 February 2019; pp. 922–929. [Google Scholar]
- Li, Y.; Yu, R.; Shahabi, C.; Liu, Y. Diffusion convolutional recurrent neural network: Data-driven traffic forecasting. arXiv 2017, arXiv:1707.01926. [Google Scholar]
- Wang, X.; Ma, Y.; Wang, Y.; Jin, W.; Wang, X.; Tang, J.; Jia, C.; Yu, J. Traffic flow prediction via spatial temporal graph neural network. In Proceedings of the Web Conference, Taiwan, China, 20–24 April 2020; pp. 1082–1092. [Google Scholar]
- Zhao, L.; Song, Y.; Zhang, C.; Liu, Y.; Wang, P.; Lin, T.; Deng, M.; Li, H. T-gcn: A temporal graph convolutional network for traffic prediction. IEEE Trans. Intell. Transp. Syst. 2019, 21, 3848–3858. [Google Scholar] [CrossRef]
- Zhu, J.; Wang, Q.; Tao, C.; Deng, H.; Zhao, L.; Li, H. AST-GCN: Attribute-augmented spatiotemporal graph convolutional network for traffic forecasting. IEEE Access 2021, 9, 35973–35983. [Google Scholar] [CrossRef]
- Bai, L.; Yao, L.; Li, C.; Wang, X.; Wang, C. Adaptive graph convolutional recurrent network for traffic forecasting. Adv. Neural Inf. Process. Syst. 2020, 33, 17804–17815. [Google Scholar]
- Li, F.; Feng, J.; Yan, H.; Jin, G.; Yang, F.; Sun, F.; Jin, D.; Li, Y. Dynamic Graph Convolutional Recurrent Network for Traffic Prediction: Benchmark and Solution; Association for Computing Machinery: New York, NY, USA, 2021. [Google Scholar]
- Yu, B.; Yin, H.; Zhu, Z. Spatio-temporal graph convolutional networks: A deep learning framework for traffic forecasting. arXiv 2017, arXiv:1709.04875. [Google Scholar]
- Wu, Z.; Pan, S.; Long, G.; Jiang, J.; Zhang, C. Graph wavenet for deep spatial-temporal graph modeling. arXiv 2019, arXiv:1906.00121. [Google Scholar]
- Song, C.; Lin, Y.; Guo, S.; Wan, H. Spatial-temporal synchronous graph convolutional networks: A new framework for spatial-temporal network data forecasting. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; pp. 914–921. [Google Scholar]
- Li, M.; Zhu, Z. Spatial-temporal fusion graph neural networks for traffic flow forecasting. In Proceedings of the the AAAI Conference on Artificial Intelligence, Vancouver, BC, Canada, 2–9 February 2021; pp. 4189–4196. [Google Scholar]
- Lin, Y.; Zhang, J.-W.; Liu, H. Deep learning based short-term air traffic flow prediction considering temporal–spatial correlation. Aerosp. Sci. Technol. 2019, 93, 105113. [Google Scholar] [CrossRef]
- Wu, Z.; Pan, S.; Chen, F.; Long, G.; Zhang, C.; Philip, S.Y. A comprehensive survey on graph neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 4–24. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research Type | Researchers | Assessment Perspectives and Indicators | Assessment Methodology |
|---|---|---|---|
| Single Perspective | K. Lee [2] | Analysis of traffic complexity based on aircraft disturbance effects | Representation of airspace complexity as a complexity diagram |
| M. Prandini [7] | Conflict risk estimation of flight trajectories | Compute the analytic approximation of the complexity measure for each point in the airspace | |
| D. Delahaye [1,5,8] | Trajectory disorder metric based on Lyapunov exponent | Representation of airspace complexity as a complexity diagram | |
| Multi-Perspective | I.V. Laudeman [4] | The dynamic density model was constructed by selecting eight indicators, including the number of aircrafts, the number of conflicts, and the number of course changes | Linear regression method |
| D. Gianazza [6,9,10] | Considering two dimensions of airspace structure and traffic characteristics, a total of 28 indicators were selected | BP neural network model | |
| M. Xiao [11] | Based on the original evaluation indicators constructed by D. Gianazza, seven key indicators were selected from them for the experiment | BP neural network model | |
| X. Zhu [12] | Complexity evaluation refers to the evaluation index system constructed by M. Xiao | Semi-supervised learning methods | |
| X. Cao [13] | The evaluation system constructed by D. Gianazza was chosen for the complexity evaluation | Transfer learning methods | |
| Z. Zhang [14] | Based on the original evaluation index system constructed by D. Gianazza | Unsupervised clustering methods |
| Number | Model | Year | Spatial Dimension | Time Dimension | External Influences |
|---|---|---|---|---|---|
| 1 | A3T-GCN [17] | 2020 | GCN | GRU + Attention | — |
| 2 | ASTGCN [18] | 2019 | GCN + Attention | CNN + Attention | — |
| 3 | DCRNN [19] | 2018 | GCN | GRU + Seq2Seq | — |
| 4 | STGNN [20] | 2020 | GCN | GRU + Transformer | — |
| 5 | T-GCN [21] | 2019 | GCN | GRU | — |
| 6 | AST-GCN [22] | 2021 | GCN | GRU | POIs, Weather |
| 7 | AGCRN [23] | 2020 | GCN | GRU | — |
| 8 | DGCRN [24] | 2021 | GCN | GRU + Seq2Seq | — |
| 9 | ST-GCN [25] | 2018 | GCN | CNN | — |
| 10 | Graph-WaveNet [26] | 2019 | GCN | CNN | — |
| 11 | STSGCN [27] | 2020 | GCN | GCN | — |
| 12 | STFGNN [28] | 2021 | GCN | CNN | — |
| Prediction Range | Metrics | HA | ARIMA | SVR | LSTM | GRU | STGCN-Nef | STGCN |
|---|---|---|---|---|---|---|---|---|
| 15-min | RMSE | 0.120 | 1.302 | 0.257 | 0.241 | 0.203 | 0.185 | 0.153 |
| MSE | 0.056 | 1.230 | 0.191 | 0.152 | 0.128 | 0.099 | 0.084 | |
| Accuracy | 81.20% | 27.70% | 86.60% | 87.50% | 89.40% | 90.40% | 92.00% | |
| 30-min | RMSE | 0.120 | 1.301 | 0.275 | 0.262 | 0.241 | 0.217 | 0.165 |
| MSE | 0.056 | 1.229 | 0.213 | 0.168 | 0.159 | 0.119 | 0.087 | |
| Accuracy | 81.20% | 27.80% | 85.70% | 86.40% | 87.50% | 88.70% | 91.40% | |
| 45-min | RMSE | 0.120 | 1.300 | 0.298 | 0.282 | 0.280 | 0.247 | 0.168 |
| MSE | 0.056 | 1.228 | 0.230 | 0.193 | 0.197 | 0.138 | 0.085 | |
| Accuracy | 81.20% | 27.80% | 84.40% | 85.40% | 85.40% | 87.10% | 91.30% | |
| 60-min | RMSE | 0.120 | 1.301 | 0.313 | 0.300 | 0.291 | 0.265 | 0.179 |
| MSE | 0.056 | 1.230 | 0.243 | 0.202 | 0.202 | 0.150 | 0.090 | |
| Accuracy | 81.20% | 27.80% | 83.70% | 84.40% | 84.90% | 86.20% | 90.70% |
| Prediction Range | Metrics | HA | ARIMA | SVR | LSTM | GRU | STGCN-nef | STGCN |
|---|---|---|---|---|---|---|---|---|
| 15-min | Precision | 80.98% | 38.61% | 91.82% | 95.85% | 96.28% | 96.32% | 97.91% |
| Recall | 79.17% | 49.08% | 91.81% | 92.75% | 94.52% | 95.05% | 97.71% | |
| 30-min | Precision | 80.98% | 38.53% | 90.25% | 93.47% | 94.06% | 94.70% | 97.15% |
| Recall | 79.17% | 49.22% | 90.22% | 90.86% | 91.22% | 93.64% | 96.02% | |
| 45-min | Precision | 80.98% | 38.47% | 89.68% | 91.38% | 93.40% | 92.57% | 96.64% |
| Recall | 79.17% | 49.51% | 89.64% | 88.53% | 89.81% | 91.27% | 95.95% | |
| 60-min | Precision | 80.98% | 38.35% | 87.09% | 90.09% | 91.86% | 92.15% | 95.89% |
| Recall | 79.17% | 49.52% | 88.73% | 86.77% | 87.09% | 90.04% | 94.33% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sui, D.; Liu, K.; Li, Q. Dynamic Prediction of Air Traffic Situation in Large-Scale Airspace. Aerospace 2022, 9, 568. https://doi.org/10.3390/aerospace9100568
Sui D, Liu K, Li Q. Dynamic Prediction of Air Traffic Situation in Large-Scale Airspace. Aerospace. 2022; 9(10):568. https://doi.org/10.3390/aerospace9100568
Chicago/Turabian StyleSui, Dong, Kechen Liu, and Qian Li. 2022. "Dynamic Prediction of Air Traffic Situation in Large-Scale Airspace" Aerospace 9, no. 10: 568. https://doi.org/10.3390/aerospace9100568
APA StyleSui, D., Liu, K., & Li, Q. (2022). Dynamic Prediction of Air Traffic Situation in Large-Scale Airspace. Aerospace, 9(10), 568. https://doi.org/10.3390/aerospace9100568