
Receding Horizon Trajectory Generation of Stratospheric Airship in Low-Altitude Return Phase

Abstract
:1. Introduction
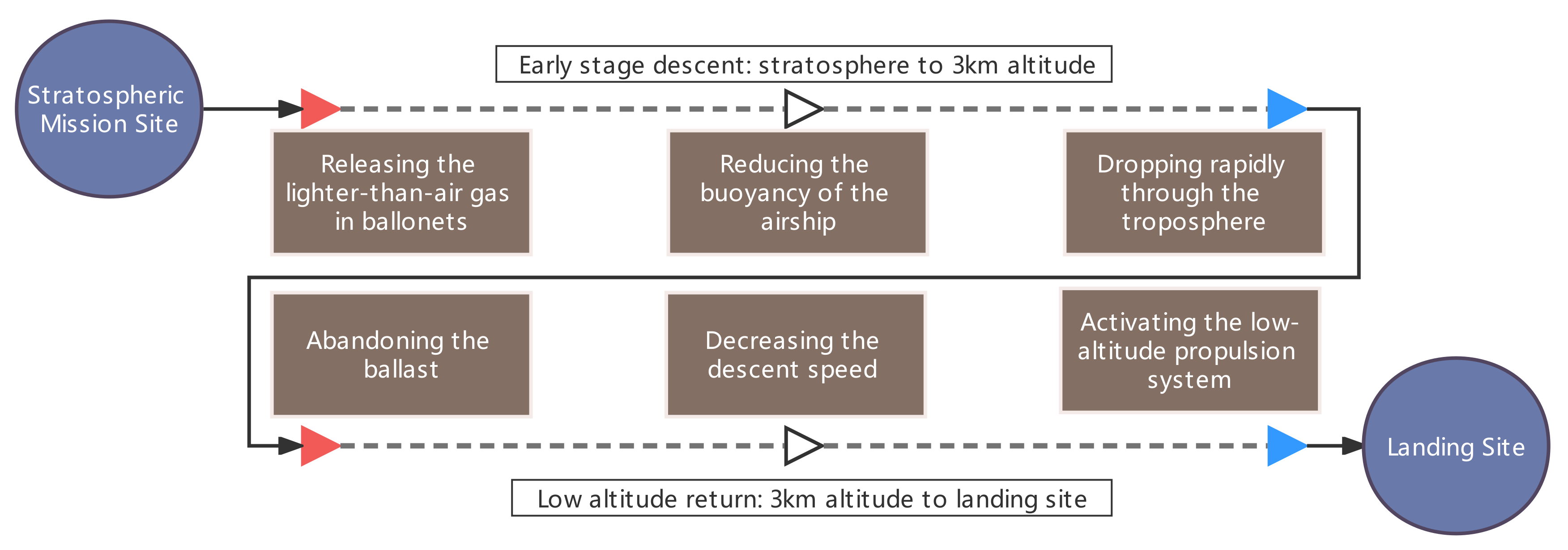
- As described above, the influence of the wind field is mainly considered in the stratosphere, and trajectory generation in the low-altitude region is not covered.
- In previous studies, the limiting factor is mainly considered as the wind field, while the path constraint is not mentioned.
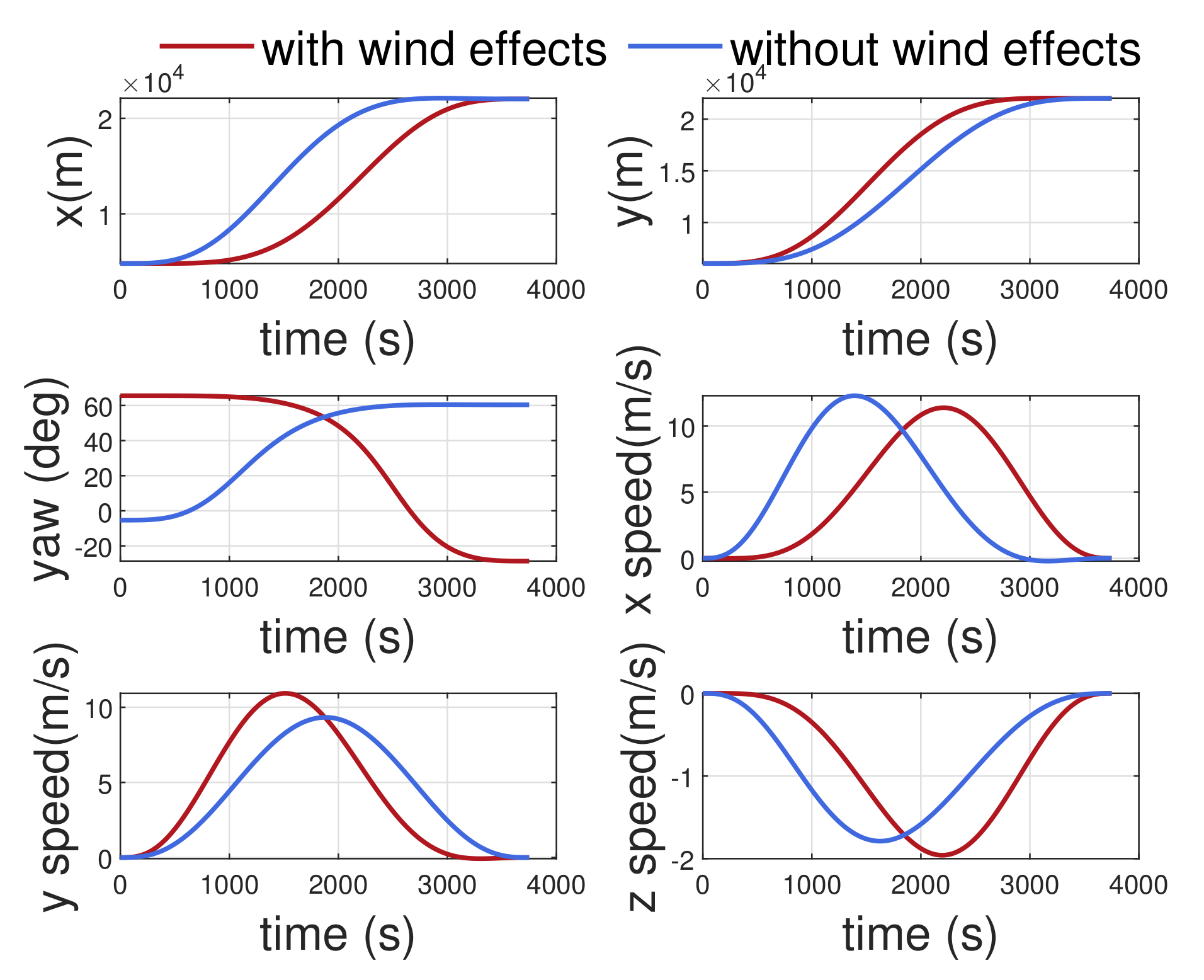
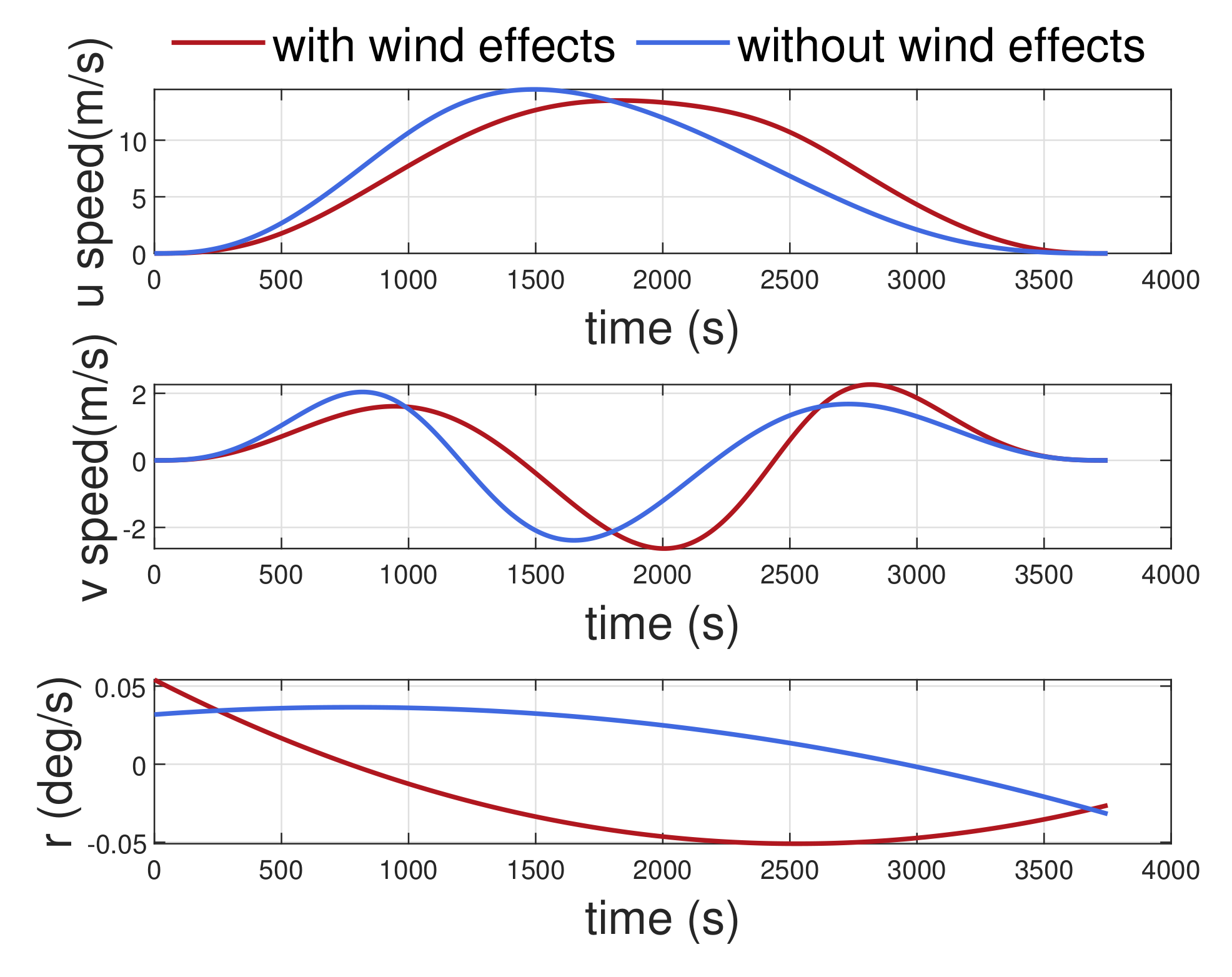
- The airship is an aircraft with large inertia, and its state cannot be changed rapidly. The trajectory generated by many studies is not smooth; for example, the speed and attitude change rapidly in a short time, which will challenge the propeller and structure of the airship.
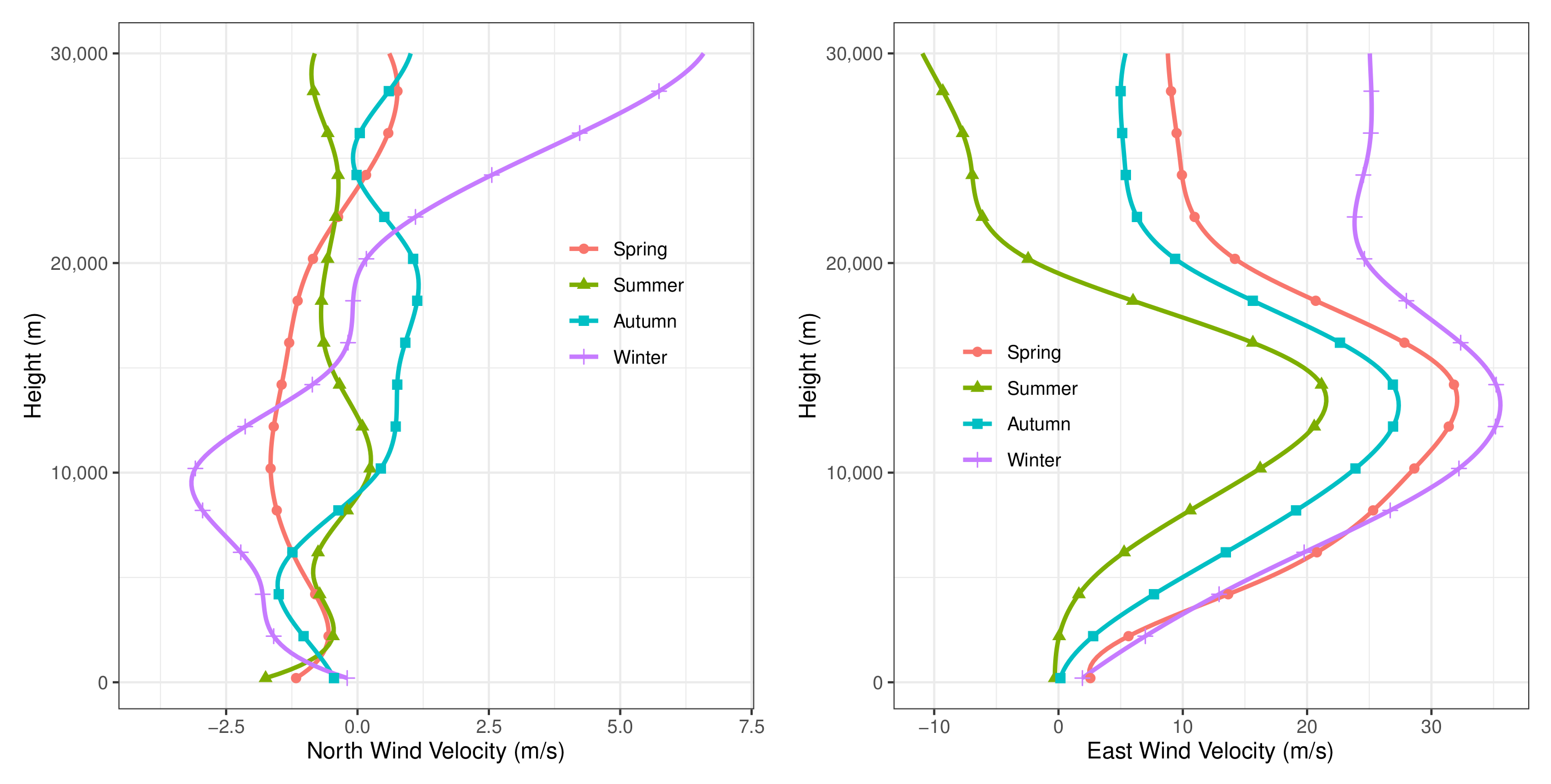
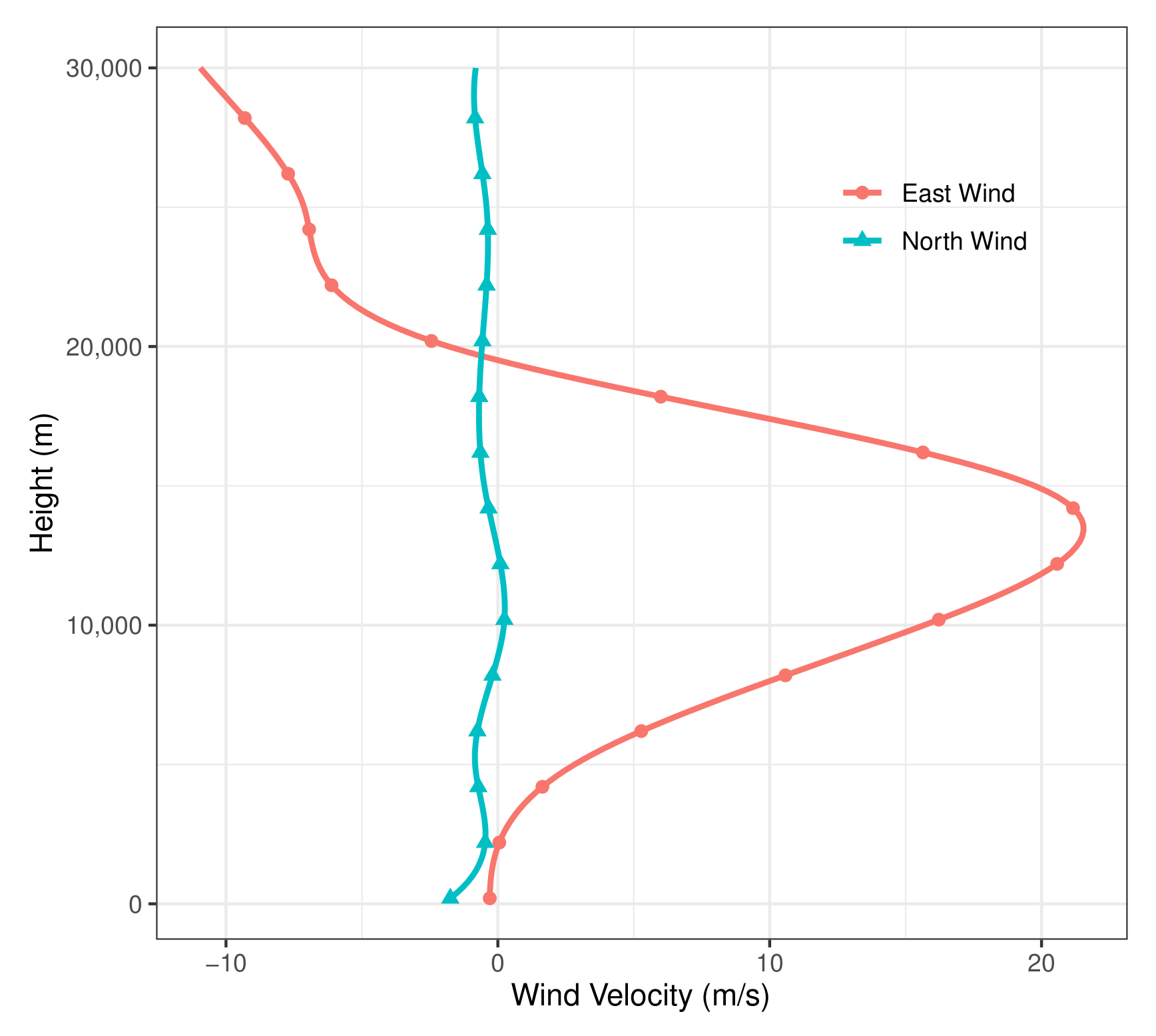
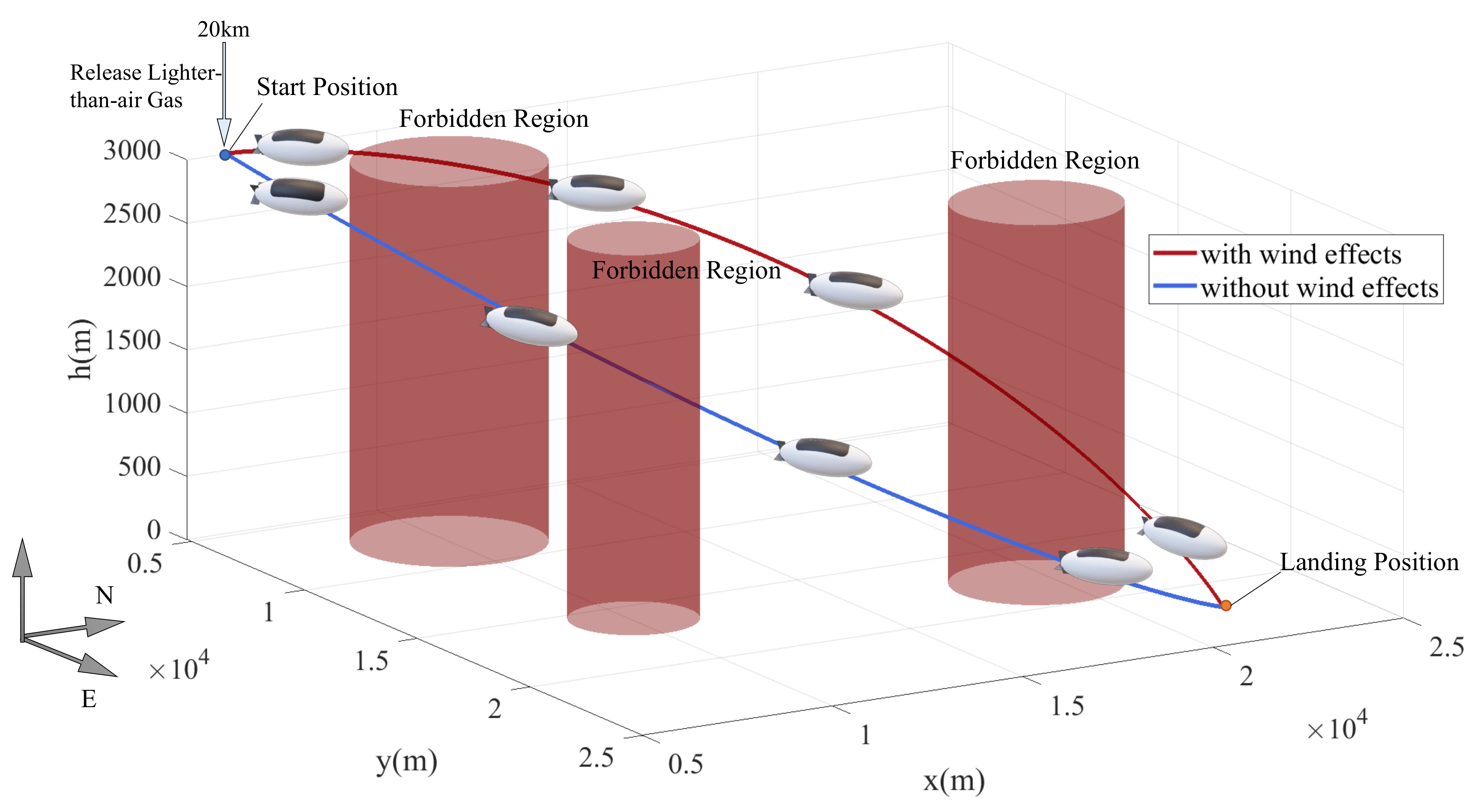
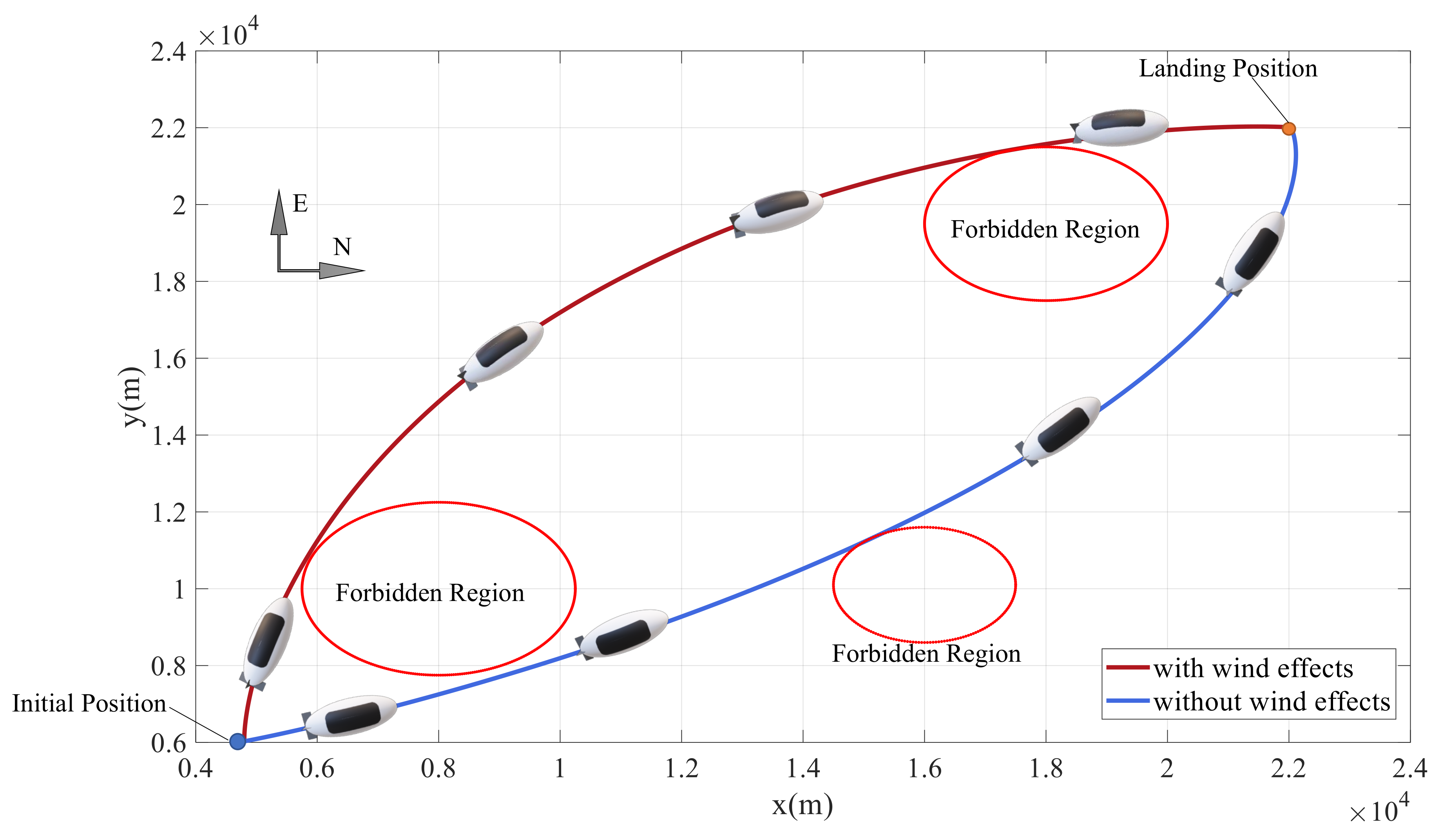
- The vertical wind shear model and constant wind model at different altitudes were established according to the wind field data results. The landing site, wind field, forbidden region and flight range were transformed into a terminal constraint, penalty function and path constraint, respectively.
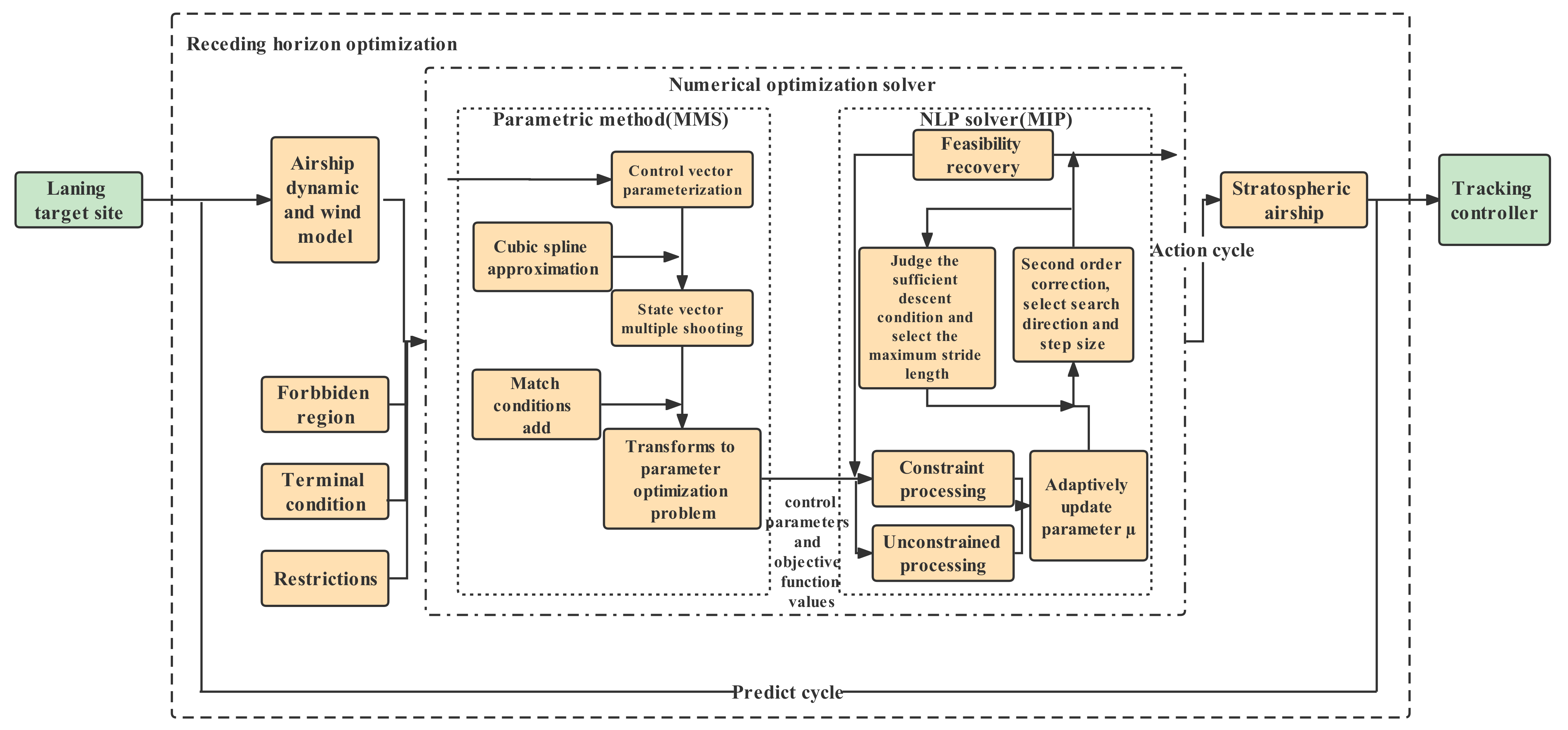
- The trajectory generation of a stratospheric airship was solved by converting the boundary value problem into parameter optimization according to the modified multiple shooting method, and transforming the inequality constraint into a penalty function by using the modified interior point method.
- An adaptive gradient descent regulator was used to reduce the influence on the optimization result due to different selections of the initial search point, and the convergence was made faster and more stable.
2. Dynamic Model and Problem Formulation
2.1. Kinematics and Dynamics Equations of the Stratospheric Airship
2.2. Wind Field Models
3. Optimal Numerical Solution
3.1. Conversion of Bolza Problem
3.2. Parameter Nonlinear Optimization
4. Optimal Flight Trajectory Result
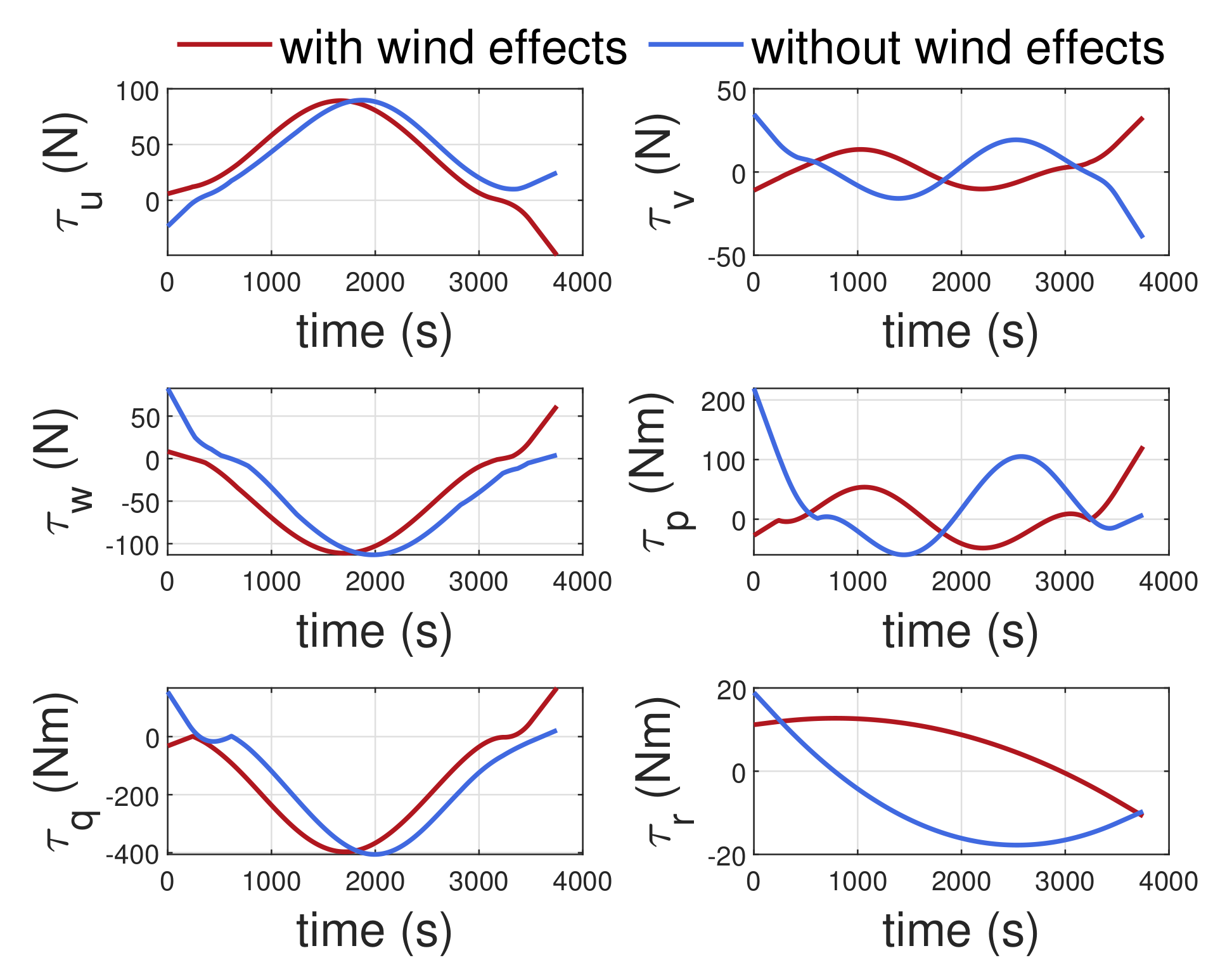
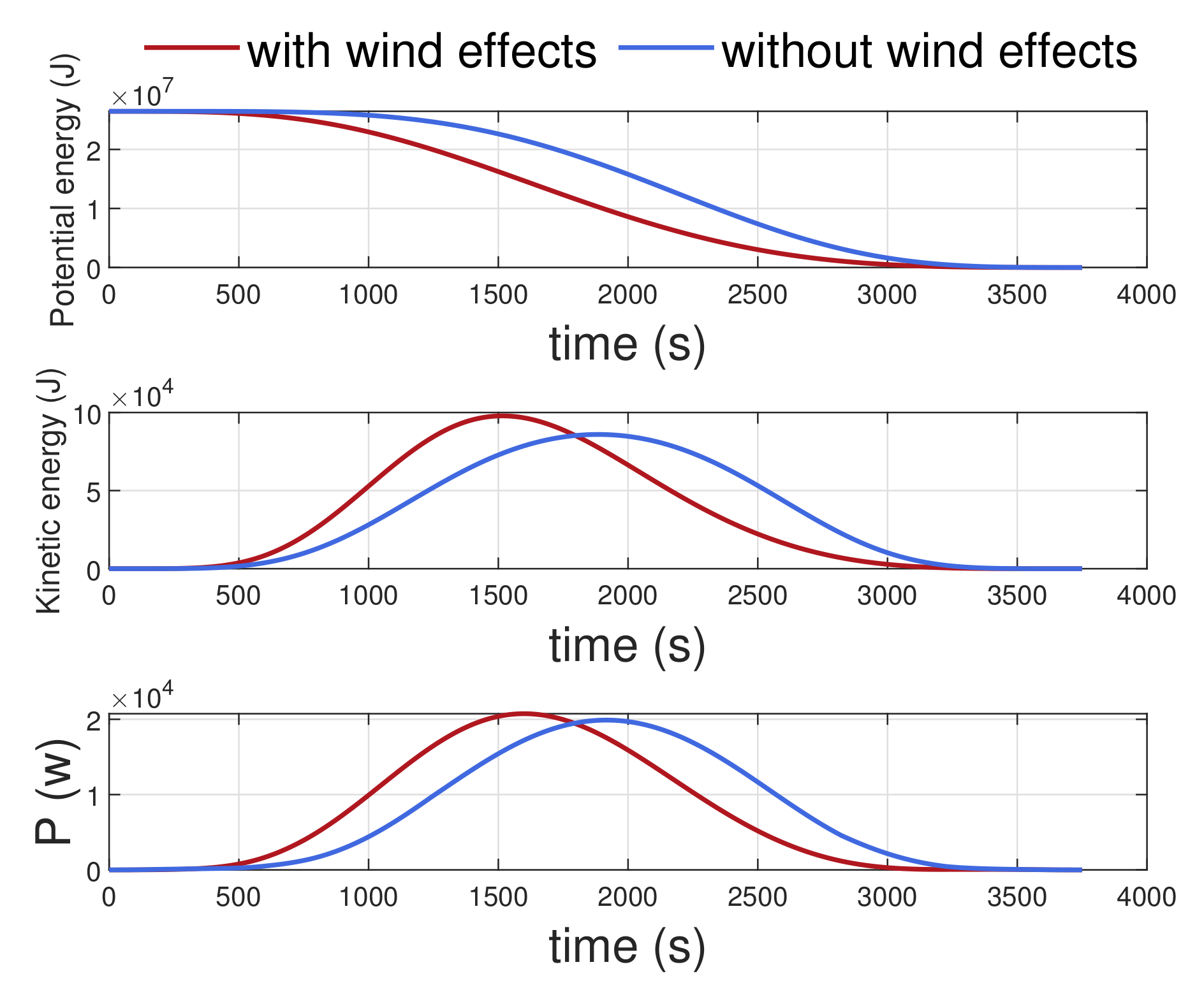
4.1. Optimization Effect under Wind Field
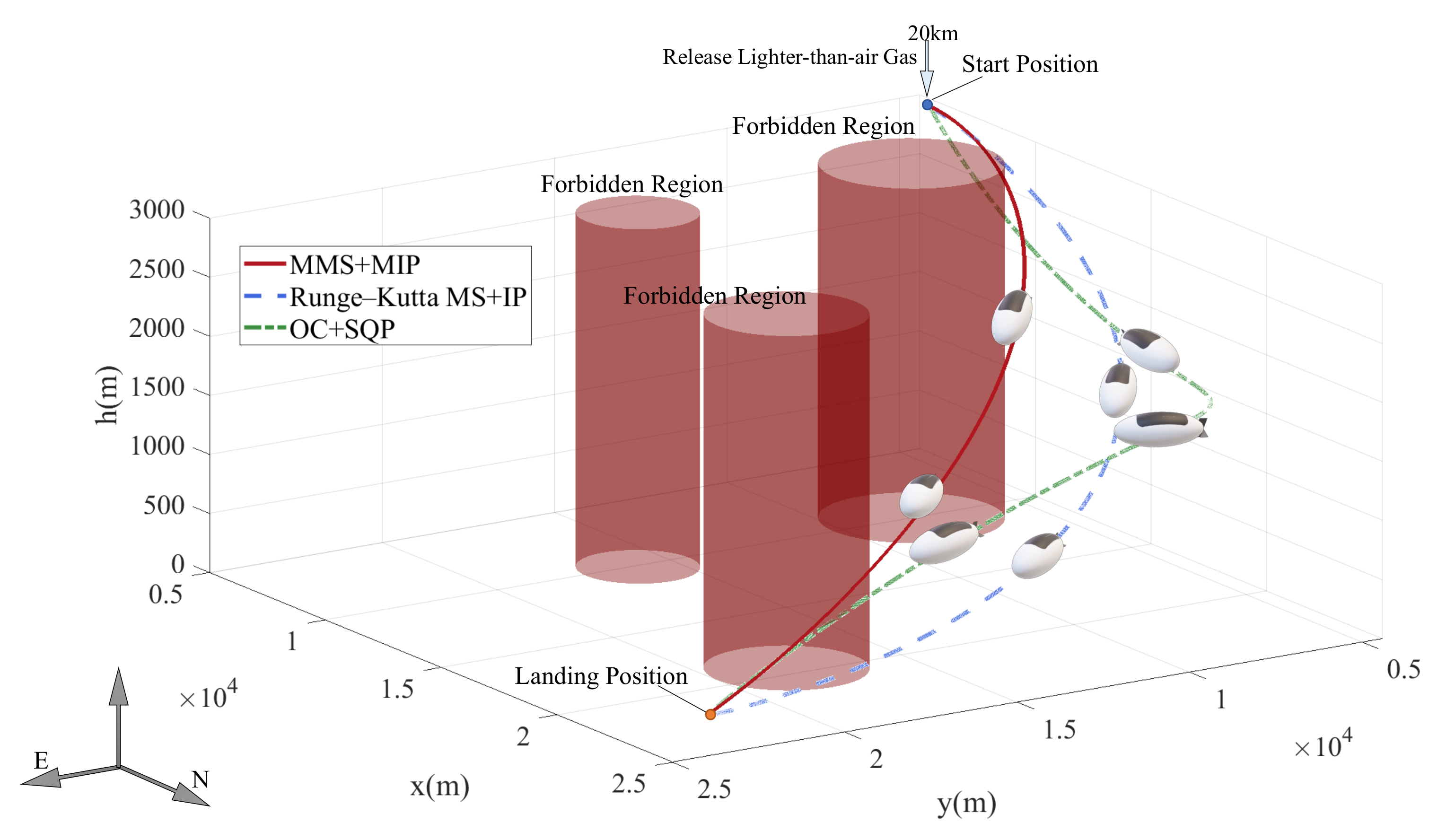
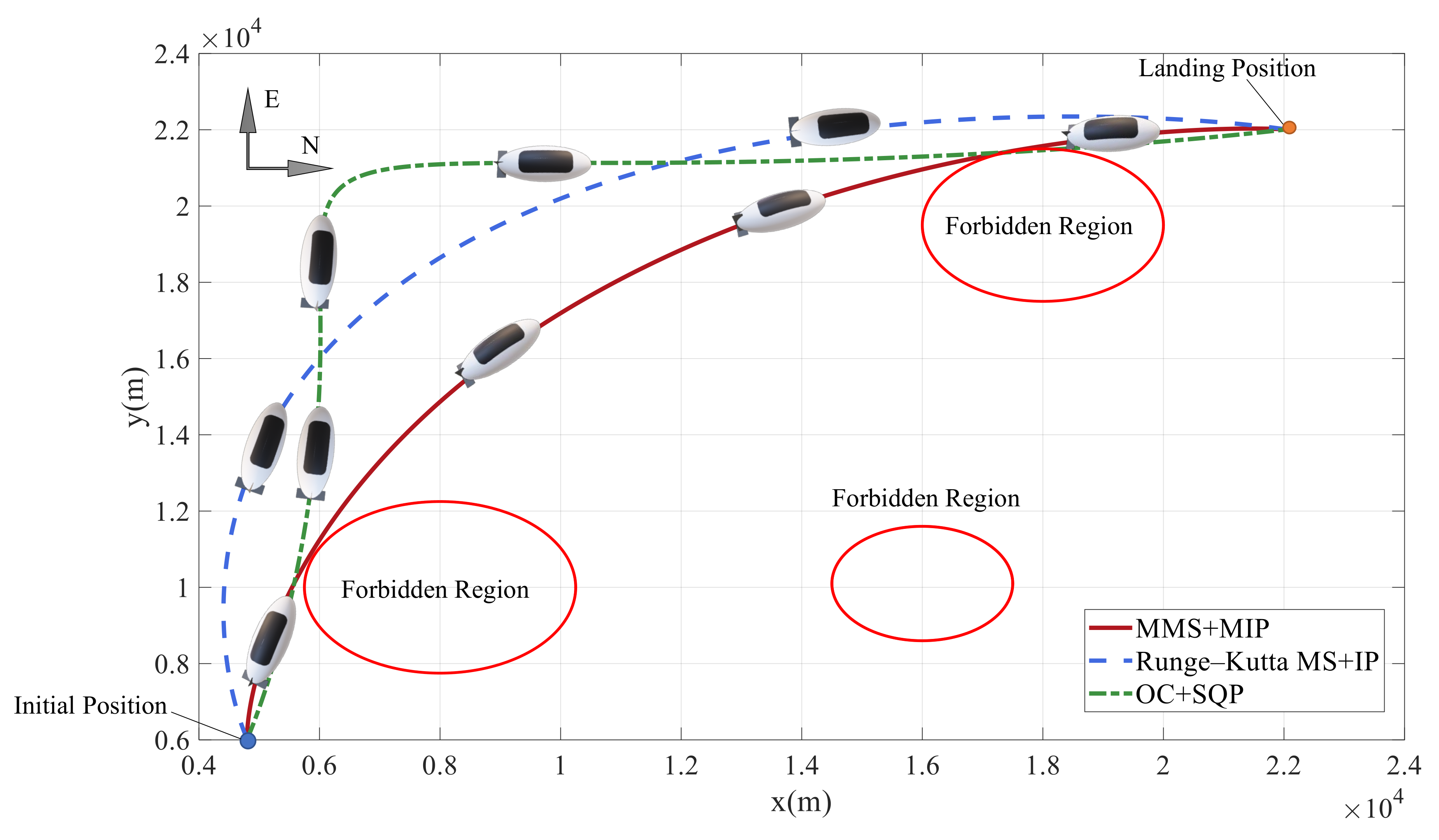
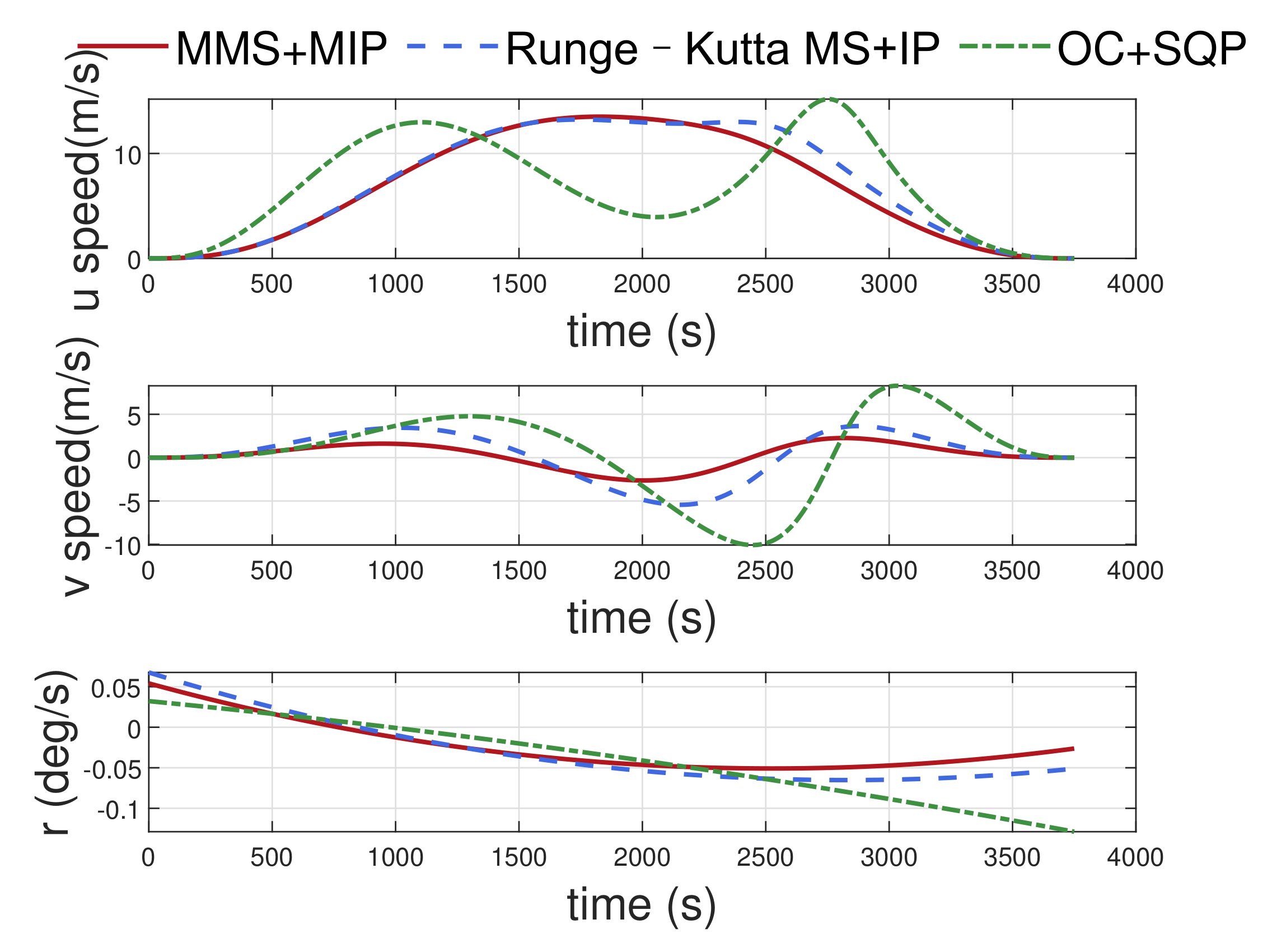
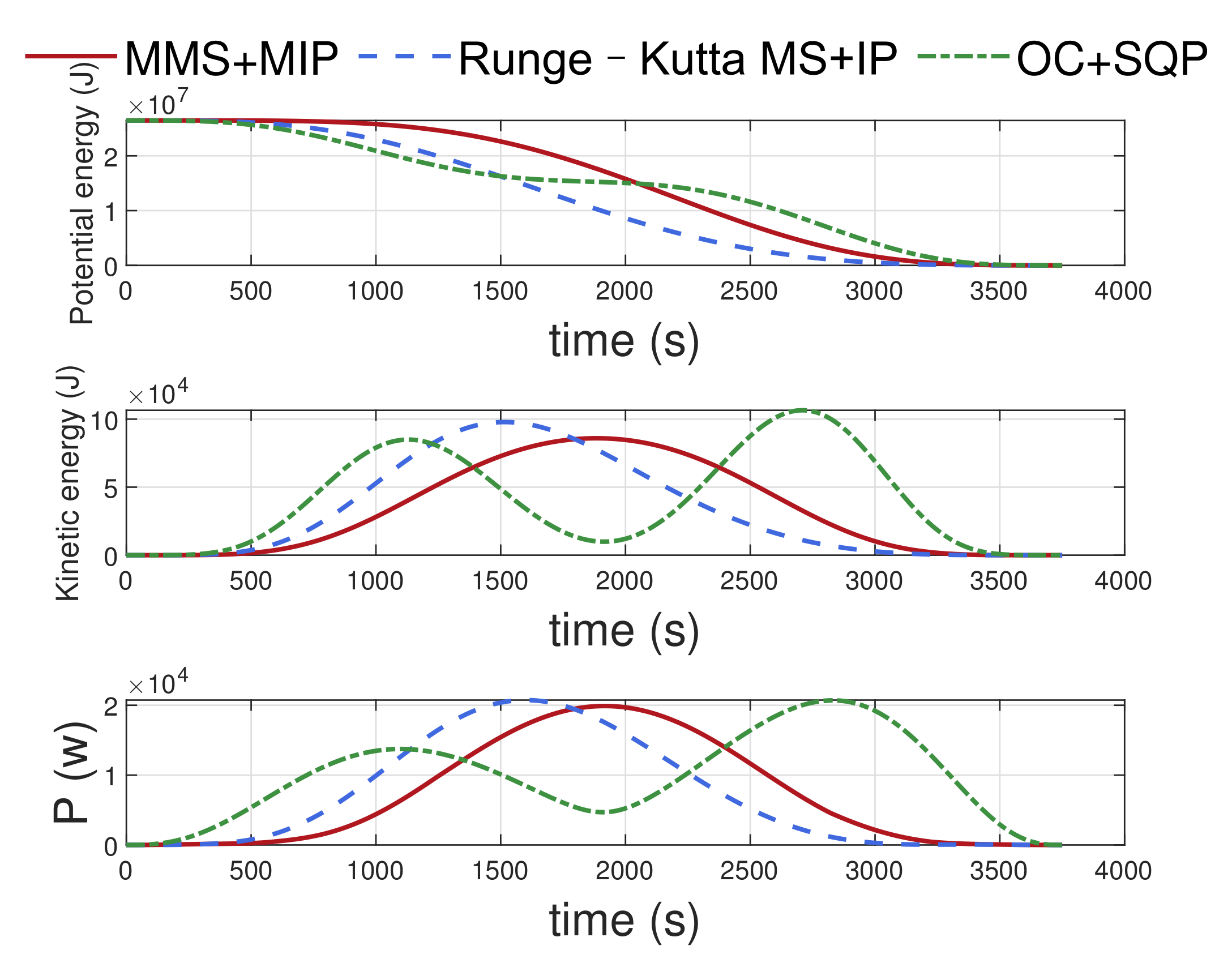
4.2. Comparison between Results of Different Methods
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tang, J.; Pu, S.; Yu, P.; Xie, W.; Li, Y.; Hu, B. Research on Trajectory Prediction of a High-Altitude Zero-Pressure Balloon System to Assist Rapid Recovery. Aerospace 2022, 9, 622. [Google Scholar] [CrossRef]
- Wang, Y.; Zhou, W.; Luo, J.; Yan, H.; Pu, H.; Peng, Y. Reliable intelligent path following control for a robotic airship against sensor faults. IEEE/ASME Trans. Mechatron. 2019, 24, 2572–2582. [Google Scholar] [CrossRef]
- Zhou, P.; Wang, Y.; Duan, D. Adaptive fault-tolerant directional control of an autonomous airship against actuator fault. In Proceedings of the 2016 35th Chinese Control Conference (CCC), IEEE, Chengdu, China, 27–29 July 2016; pp. 10538–10542. [Google Scholar]
- Tang, J.; Xie, W.; Wang, X.; Chen, C. Simulation and Analysis of Fluid–Solid–Thermal Unidirectional Coupling of Near-Space Airship. Aerospace 2022, 9, 439. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, Q.; Duan, D.; Xie, W.; Wei, Y. Neuroadaptive output-feedback trajectory tracking control for a stratospheric airship with prescribed performance. Aeronaut. J. 2020, 124, 1568–1591. [Google Scholar] [CrossRef]
- Tang, J.; Duan, D.; Xie, W. Shape Exploration and Multidisciplinary Optimization Method of Semirigid Nearing Space Airships. J. Aircr. 2022, 59, 946–963. [Google Scholar] [CrossRef]
- Tang, J.; Xie, W.; Wang, X.; Chen, Y.; Wu, J. Study of the Mechanical Properties of Near-Space Airship Envelope Material Based on an Optimization Method. Aerospace 2022, 9, 655. [Google Scholar] [CrossRef]
- Teng, Y.; Song, Y.; Tong, S.; Zhang, M. Acquisition Performance of Laser Communication System Based on Airship Platform. Acta Opt. Sin. 2018, 38, 0606005. [Google Scholar] [CrossRef]
- Yu, Z.; Zhang, Y.; Jiang, B.; Su, C.Y.; Fu, J.; Jin, Y.; Chai, T. Distributed fractional-order intelligent adaptive fault-tolerant formation-containment control of two-layer networked unmanned airships for safe observation of a smart city. IEEE Trans. Cybern. 2021, 52, 9132–9144. [Google Scholar] [CrossRef]
- Zhao, Z.; Dong, X.; Feng, J.; Liang, X.; Hu, C. A Simulating Method of Airship-Borne Polarimetric Weather Radar for Typhoon Observation. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, IEEE, Waikoloa, HI, USA, 19–24 July 2020; pp. 5306–5309. [Google Scholar]
- Tang, J.; Wang, X.; Duan, D.; Xie, W. Optimisation and analysis of efficiency for contra-rotating propellers for high-altitude airships. Aeronaut. J. 2019, 123, 706–726. [Google Scholar] [CrossRef]
- Chu, X.; Lin, X.; Lan, W. Energy-optimal rectilinear trajectory for stratospheric airships in constant wind field. In Proceedings of the 2013 IEEE International Conference on Cyber Technology in Automation, Control and Intelligent Systems, IEEE, Nanjing, China, 26–29 May 2013; pp. 264–269. [Google Scholar]
- Guo, X.; Zhu, M. Ascent trajectory optimization for stratospheric airship with thermal effects. Adv. Space Res. 2013, 52, 1097–1110. [Google Scholar] [CrossRef]
- Zhu, B.J.; Yang, X.X.; Deng, X.L.; Ma, Z.Y.; Hou, Z.X.; Jia, G.W. Trajectory optimization and control of stratospheric airship in cruising. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2019, 233, 1329–1339. [Google Scholar] [CrossRef]
- Mueller, J.; Zhao, Y.; Garrard, W. Sensitivity and solar power analysis of optimal trajectories for autonomous airships. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009; p. 6014. [Google Scholar]
- Zhang, L.; Li, J.; Jiang, Y.; Du, H.; Zhu, W.; Lv, M. Stratospheric airship endurance strategy analysis based on energy optimization. Aerosp. Sci. Technol. 2020, 100, 105794. [Google Scholar] [CrossRef]
- Lee, S.; Bang, H. Three-dimensional ascent trajectory optimization for stratospheric airship platforms in the jet stream. J. Guid. Control. Dyn. 2007, 30, 1341–1351. [Google Scholar] [CrossRef]
- Zhu, W.; Li, J.; Xu, Y. Optimum attitude planning of near-space solar powered airship. Aerosp. Sci. Technol. 2019, 84, 291–305. [Google Scholar] [CrossRef]
- Wang, J.; Meng, X.; Li, C. Recovery trajectory optimization of the solar-powered stratospheric airship for the station-keeping mission. Acta Astronaut. 2021, 178, 159–177. [Google Scholar] [CrossRef]
- Blouin, C.; Lanteigne, E.; Gueaieb, W. Trajectory optimization of a small airship in a moving fluid. Trans. Can. Soc. Mech. Eng. 2016, 40, 191–200. [Google Scholar] [CrossRef] [Green Version]
- Das, T.; Mukherjee, R.; Cameron, J. Optimal trajectory planning for hot-air balloons in linear wind fields. J. Guid. Control. Dyn. 2003, 26, 416–424. [Google Scholar] [CrossRef] [Green Version]
- Ceruti, A.; Marzocca, P. Heuristic optimization of Bezier curves based trajectories for unconventional airships docking. Aircr. Eng. Aerosp. Technol. 2017, 89, 76–86. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, X.; Deng, X.; Lin, H. Trajectory control method of stratospheric airships based on model predictive control in wind field. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 418–425. [Google Scholar] [CrossRef]
- Bestaoui, Y.; Kahale, E. Time optimal 3D trajectories for a lighter than air robot with second order constraints with a piecewise constant acceleration. J. Aerosp. Inf. Syst. 2013, 10, 155–171. [Google Scholar] [CrossRef]
- Mueller, J.B.; Zhao, Y.J.; Garrard, W.L. Optimal ascent trajectories for stratospheric airships using wind energy. J. Guid. Control. Dyn. 2009, 32, 1232–1245. [Google Scholar] [CrossRef]
- Liu, S.; Sang, Y.; Jin, H. Robust model predictive control for stratospheric airships using LPV design. Control. Eng. Pract. 2018, 81, 231–243. [Google Scholar] [CrossRef]
- Zhou, W.X.; Xiao, C.; Zhou, P.F.; Duan, D.P. Spatial path following control of an autonomous underactuated airship. Int. J. Control. Autom. Syst. 2019, 17, 1726–1737. [Google Scholar] [CrossRef]
- Chen, L.; Zhou, G.; Yan, X.; Duan, D. Composite control of stratospheric airships with moving masses. J. Aircr. 2012, 49, 794–801. [Google Scholar] [CrossRef]
- Zheng, Z.; Zhu, M.; Shi, D.; Wu, Z. Hovering control for a stratospheric airship in unknown wind. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, National Harbor, MA, USA, 13–17 January 2014; p. 0973. [Google Scholar]
- Azinheira, J.R.; de Paiva, E.C.; Bueno, S.S. Influence of wind speed on airship dynamics. J. Guid. Control. Dyn. 2002, 25, 1116–1124. [Google Scholar] [CrossRef]
- Sarma, A.; Hochstetler, R.; Wait, T. Optimization of airship routes for weather. In Proceedings of the 7th AIAA ATIO Conf, 2nd CEIAT Int’l Conf on Innov and Integr in Aero Sciences, 17th LTA Systems Tech Conf; followed by 2nd TEOS Forum, Belfast, Ireland, 18–20 September 2007; p. 7880. [Google Scholar]
- Gul, B.; Ameen, M.A.; Verhulst, T.G. Correlation between foEs and zonal winds over Rome, Okinawa and Townsville using Horizontal Wind Model (HWM14) during solar cycle 22. Adv. Space Res. 2021, 68, 4658–4664. [Google Scholar] [CrossRef]
- Athans, M.; Canon, M. On the fuel-optimal singular control of nonlinear second-order systems. IEEE Trans. Autom. Control 1964, 9, 360–370. [Google Scholar] [CrossRef]
- Bongiorno, J. Minimum-energy control of a second-order nonlinear system. IEEE Trans. Autom. Control 1967, 12, 249–255. [Google Scholar] [CrossRef]
- Diedam, H.; Sager, S. Global optimal control with the direct multiple shooting method. Optim. Control. Appl. Methods 2018, 39, 449–470. [Google Scholar] [CrossRef]
- Greco, C.; Di Carlo, M.; Vasile, M.; Epenoy, R. Direct multiple shooting transcription with polynomial algebra for optimal control problems under uncertainty. Acta Astronaut. 2020, 170, 224–234. [Google Scholar] [CrossRef]
- Chen, Y.; Scarabottolo, N.; Bruschetta, M.; Beghi, A. Efficient move blocking strategy for multiple shooting-based non-linear model predictive control. IET Control Theory Appl. 2020, 14, 343–351. [Google Scholar] [CrossRef] [Green Version]
- Wächter, A.; Biegler, L.T. On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming. Math. Program. 2006, 106, 25–57. [Google Scholar] [CrossRef]
- Guo, C.; Li, D.; Zhang, G.; Ding, X.; Curtmola, R.; Borcea, C. Dynamic interior point method for vehicular traffic optimization. IEEE Trans. Veh. Technol. 2020, 69, 4855–4868. [Google Scholar] [CrossRef]
- Jiang, H.; Kathuria, T.; Lee, Y.T.; Padmanabhan, S.; Song, Z. A faster interior point method for semidefinite programming. In Proceedings of the 2020 IEEE 61st Annual Symposium on Foundations of Computer Science (FOCS), IEEE, Durham, NC, USA, 16–19 November 2020; pp. 910–918. [Google Scholar]
- Wang, X.L.; Fu, G.Y.; Duan, D.P.; Shan, X.X. Experimental investigations on aerodynamic characteristics of the ZHIYUAN-1 airship. J. Aircr. 2010, 47, 1463–1468. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Airship Parameters | Value |
|---|---|
| Length, | |
| Maximum diameter, | |
| Fineness ratio of the hull | |
| Volume of the hull, | |
| Surface area, | |
| Location of maximum diameter, | |
| Moment center, | |
| Reference area, | |
| Reference length, | |
| Volume Reynolds number | 1.8–9.3 |
| Receding Horizon Parameters | Value |
|---|---|
| Sampling interval, | |
| Predict cycle | 600 |
| Input interval, | |
| Action cycle | 500 |
| Method | Advantage | Disadvantage |
|---|---|---|
| MS method | The structure is simple and easy to implement, and the result is smooth and stable | The convergence domain is narrow and the time grid is evenly divided |
| OC method | High solving efficiency and high conversion efficiency | Conjugate variable cannot be approximated explicitly; high sensitivity of mesh refinement and optimization index |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jing, Y.; Wu, Y.; Tang, J.; Zhou, P.; Duan, D. Receding Horizon Trajectory Generation of Stratospheric Airship in Low-Altitude Return Phase. Aerospace 2022, 9, 670. https://doi.org/10.3390/aerospace9110670
Jing Y, Wu Y, Tang J, Zhou P, Duan D. Receding Horizon Trajectory Generation of Stratospheric Airship in Low-Altitude Return Phase. Aerospace. 2022; 9(11):670. https://doi.org/10.3390/aerospace9110670
Chicago/Turabian StyleJing, Yuhao, Yang Wu, Jiwei Tang, Pingfang Zhou, and Dengping Duan. 2022. "Receding Horizon Trajectory Generation of Stratospheric Airship in Low-Altitude Return Phase" Aerospace 9, no. 11: 670. https://doi.org/10.3390/aerospace9110670