1. Introduction
The presence of a sand/dust environment is one of the most important environmental factors that cause aircraft failures [
1]. Widespread distribution of sand/dust has a serious impact on the components, systems, and airborne equipment of machinery and aircrafts [
2]. The primary types of damage are: erosion, wear, corrosion, and penetration [
3]. In light of the laws of dilute gas-solid, harnessing two-phase flow can not only improve the quality of equipment development but also can be used to guide the design and implementation of sand/dust tests and render them more scientific and realistic, which in turn informs the design of sand/dust damage prevention equipment [
4]. Meanwhile, it improves the development, production, and identification of weapons and equipment, which has great practical value. At present, it is still difficult to use computers to simulate a sand/dust environment [
5]. Therefore, it is essential to construct experimental equipment that simulates such an environment instead.
The standardized sand/dust test conditions are a typical gas-solid two-phase flow field. In the experiment, the concentration of the blowing dust is approximately 10.6 ± 7 g/m
3, while the concentration of the blowing sand is between 0.18 ± 0.2 g/m
3 and 2.2 ± 0.5 g/m
3 [
6], in the range of dilute phase transport. Under typical working conditions with a wind speed of 30 m/s, the Reynolds number of the test section will reach 4.47 × 106, which is greater than the critical value of both laminar flow and turbulent flow. The gas is in the turbulent state. Therefore, the flow field in the test device can be considered a dilute-phase turbulent flow and gas-solid two-phase flow.
Designing reliable simulation experiments of a sand/dust environment to meet the requirements is a top priority task [
7]. In this article, the effective capacity of the wind tunnel test section and the circulating air volume more than meet the requirements [
8]. There is no similar equipment in China that has been specially developed to synthesize blowing sand and blowing dust into a whole device.
To successfully develop such large sand/dust test equipment, solutions must be found for the technical difficulties of temperature, wind speed, and sand/dust concentration control [
9]. At the same time, the corrosive sample of the sand/dust should be effectively separated and reclaimed. This will ensure the test equipment’s high reliability and long service life [
10]. Therefore, temperature control, wind speed control, sand/dust concentration control, particle distribution uniformity control, and sand/dust reclamation efficiency are the key issues that determine the quality of the developed equipment.
To solve the above problems, B. Barlow presented an experimental method for a low speed wind tunnel [
11]. J. Yao offered a control method for wind speed and air flow in a low speed wind tunnel [
12]. E. Brown and J. Duhon advanced a concept for designing and testing a full-size helicopter’s air duct [
13]. Li Yunze and Yuan Lingshuang developed a control strategy using a Proportion Integration Differentiation (PID) controller in the helicopter’s sand/dust environmental test tunnel [
14]. Li Yunze and Yuan Lingshuang proposed a lumped parameter model and control strategy based on the pressure in the wind tunnel [
15]. Using the wind tunnel of a helicopter sand/dust test, Ma Zhihong and Yuan Lingshuang formulated a temperature control measurement strategy based on an environmental cooling water flow and electric heater power controller [
16]. As for humidity control, Zhang Kaiping outlined a method of dehumidification by controlling the dry compressed air flow [
17].
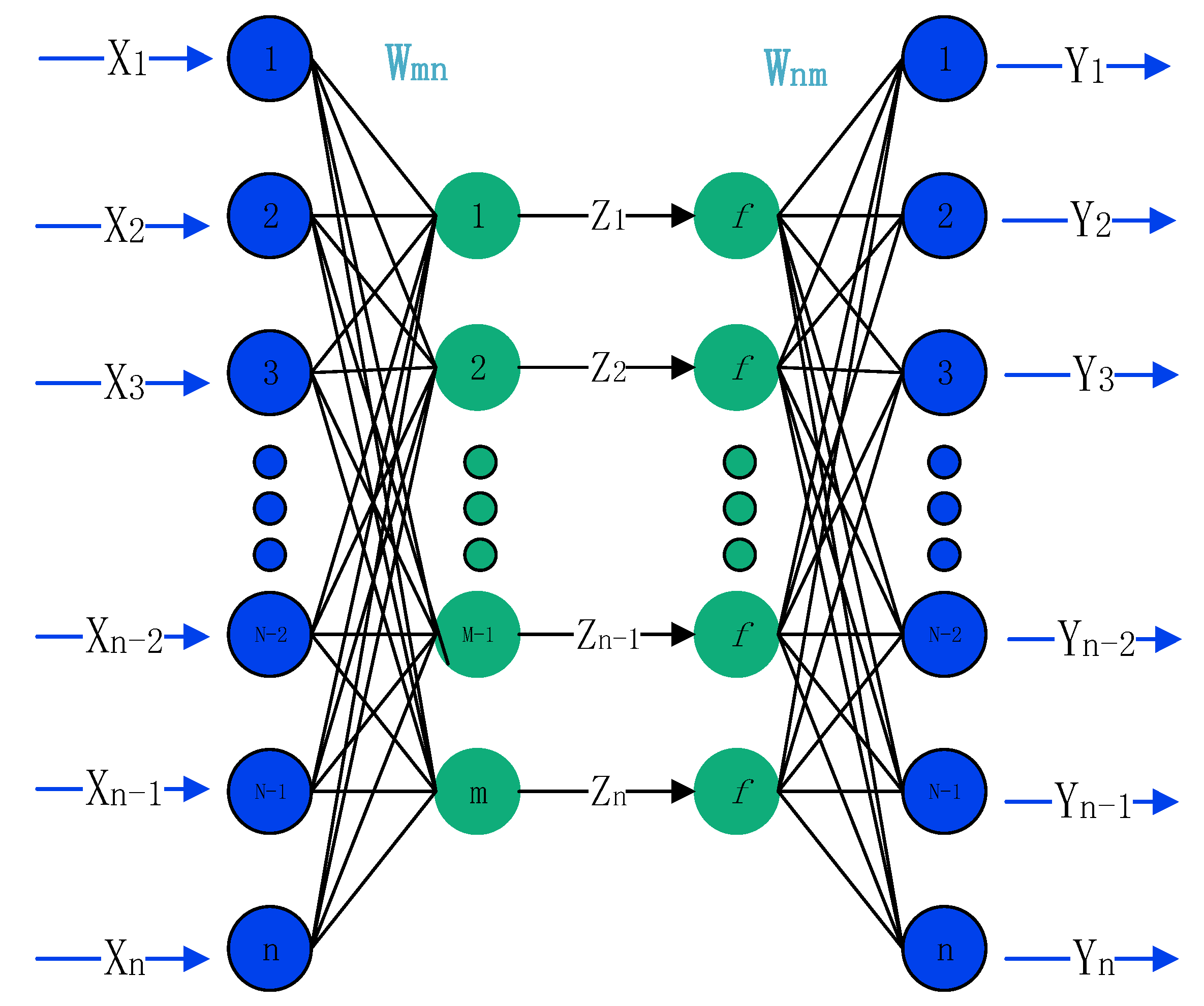
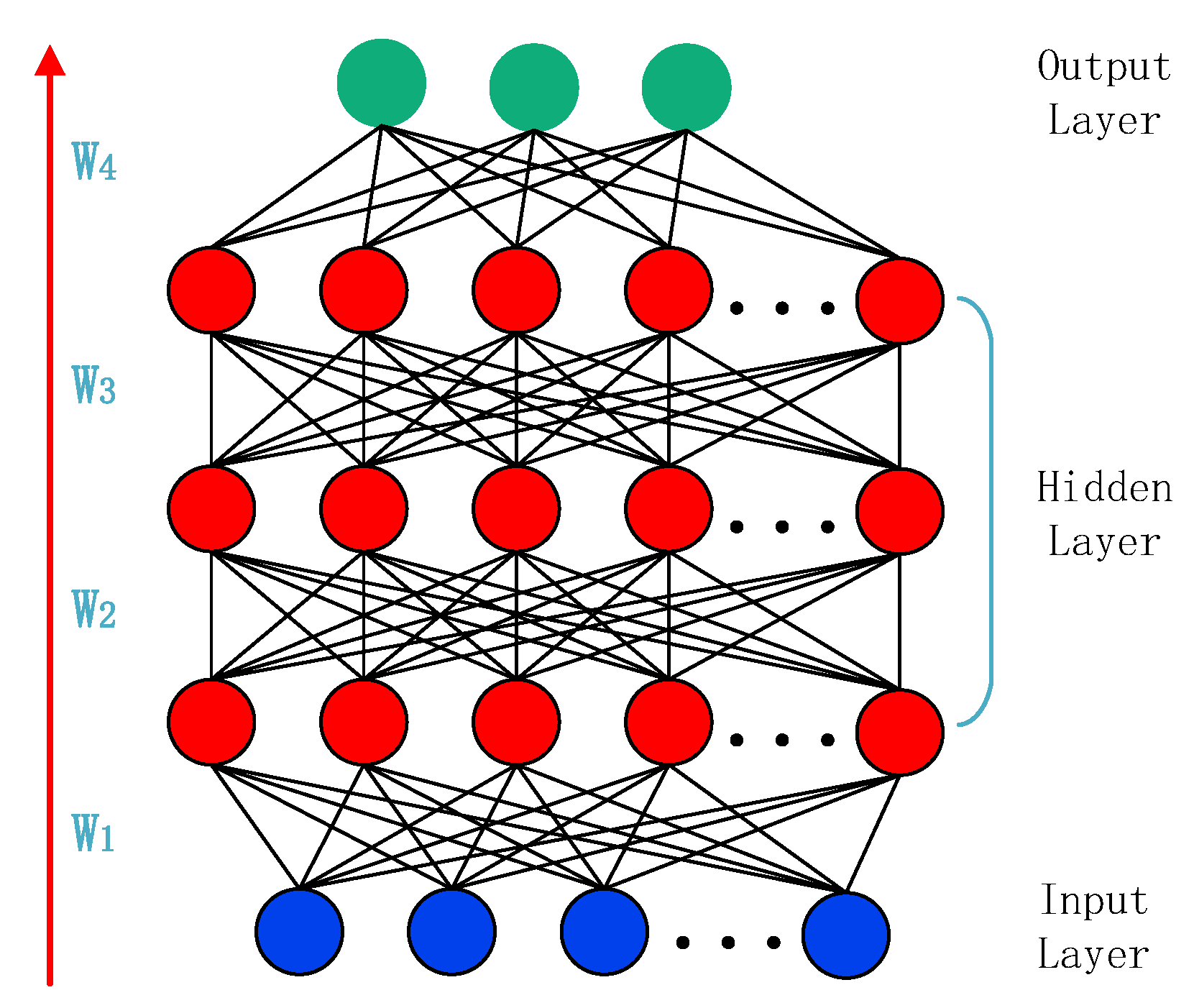
In this paper, we designed a helicopter’s sand/dust test environment. A control system for the sand and dust test environment is developed based on a reflux flow wind tunnel with a dilute gas-solid, two-phase flow field. The control system mainly uses the SAE (Stacked Autoencoder) algorithm and fuzzy controller [
18]. SAE is an unsupervised algorithm consisting of a deep neural network model with multiple layers of sparse autoencoder that automatically learns features from unlabeled data and gives a better feature description than the original data [
19]. The fuzzy-SAE algorithm can automatically adjust PID parameters to improve the control accuracy and speed of the sand/dust testing environment.
2. Control Scheme
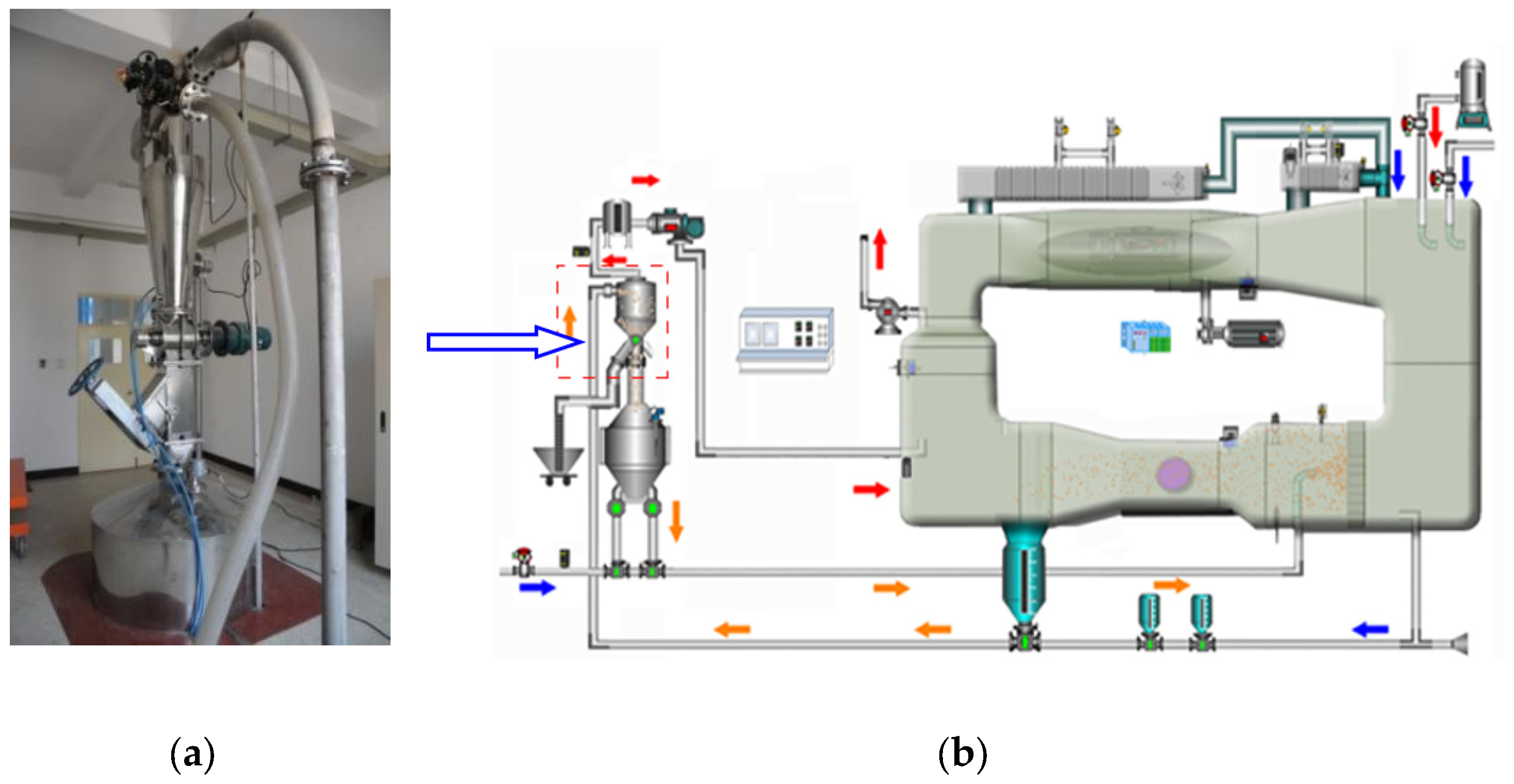
The flow chart for the pneumatic conveyance control system is shown in
Figure 1. The red arrow is the flow direction of sand/dust. The blue and orange arrows are the flow directions of the cool and the hot air, respectively. The appearance of the pneumatic conveyance component is also presented in
Figure 1a.
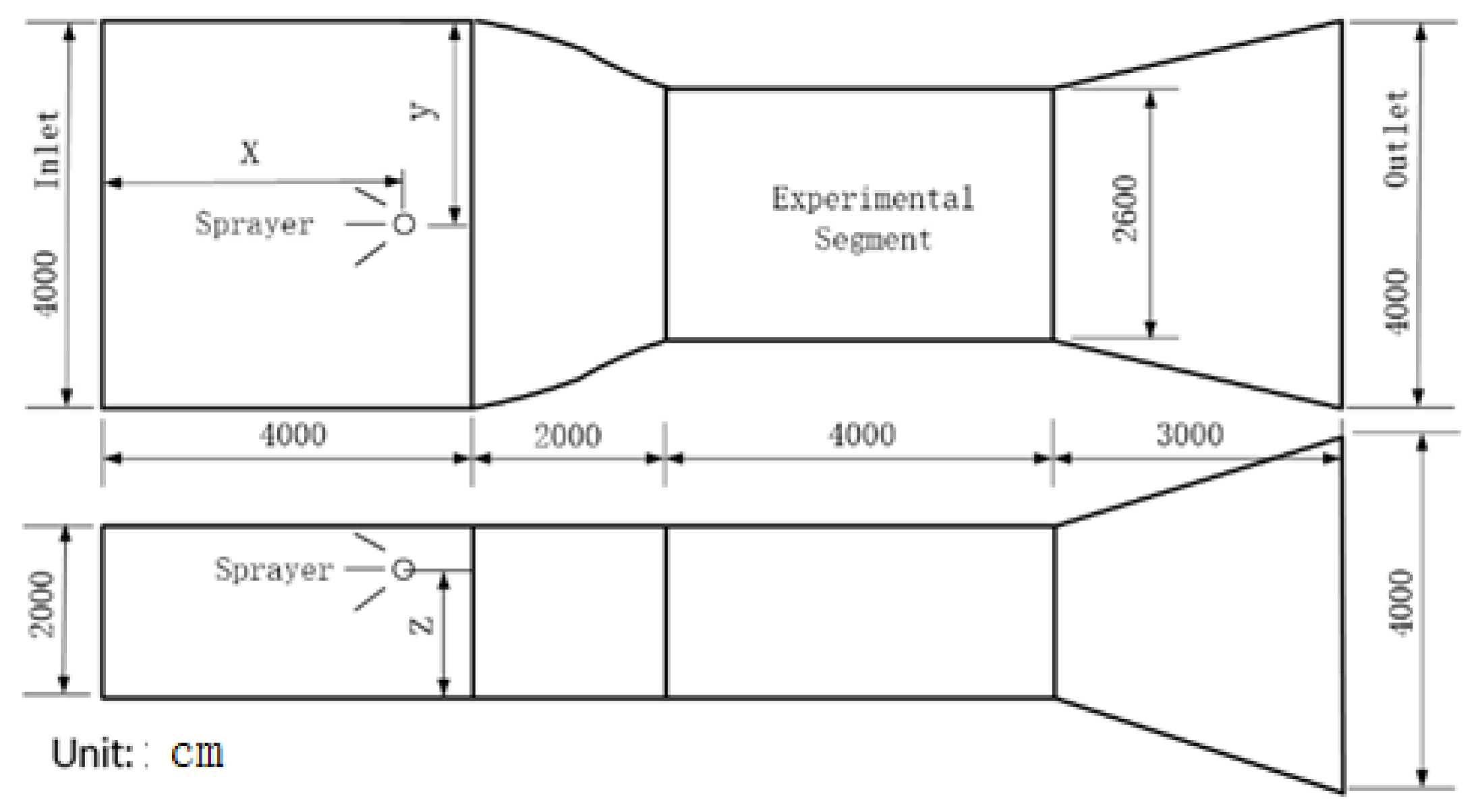
Figure 2 is a schematic diagram of the experimental wind tunnel, which is a typical wind tunnel structure.
2.1. Wind Speed Control System
The wind speed control system is based on the measurement and control system using the fuzzy controller. The wind speed can be calculated by the relationship between pressure and air density:
where
is wind speed value, ρ is the air density,
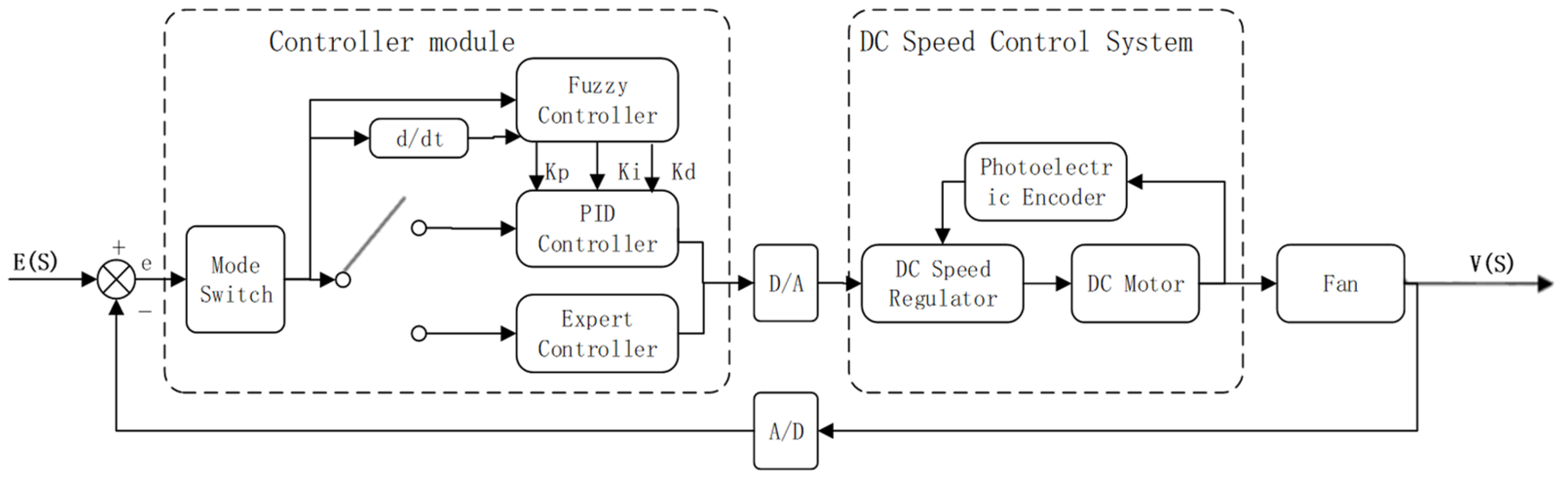
is the difference in pressure between the total pressure and the static pressure of the wind tunnel test section, and is measured by using a high-precision, differential pressure transducer that delivers measurements to the computer by a 16-bit (analogue/digital converter) acquisition. The controller is composed of a mode selection switch, a fuzzy controller, and an expert controller. The fuzzy controller consists of a fuzzy parameter regulator and a standard PID controller. The D/A (digital/analogue converter) converts a computer controlled digital value into an analogue current, that is, the standard current signal, and transports it to the governor SSR (Solid State Relay) thermostat. The DC motor power in the wind tunnel is 300 kW. The DC motor speed control system, a closed-loop speed adjustment system, is composed of a DC speed regulator, a DC motor, and a photoelectric encoder.
Figure 3 shows the schematic diagram of the wind velocity measurement and control system.
In the wind speed feedback control system, the control console is the analogue comparator element using A/D to collect the data, and the D/A to produce output signals. The DC speed regulator is an actuator and the wind speed is the controlled variable, measured by the wind speed sensor.
2.2. Pneumatic Conveyance and Concentration Control System
The function of this system is to adjust the amount of sand/dust in the circulating air duct beyond the spray head. Further, it ensures that the sand/dust concentration in the control test section is in accordance with the requirements and is kept uniform along the interface.
The sand/dust concentration is measured by a sand/dust sensor transmitter that is installed on the top of the inlet duct of the test section. The input of 4 to 20 mA is a standard DC signal to the controller. Next, the controller operation produces a 4–20 mA output control signal. Adjustment of the rotary feeder speed is performed by a frequency converter, R4. This changes the amount of sand/dust and keep the concentration of sand/dust at the set value [
20].
The concentration uniformity is related to the shape, quantity, arrangement, spraying angle, and length of the nozzle. In light of our analysis, we determined that the use of two or three nozzles is sufficient. The nozzle shape can be chosen to have a circular straight channel, or circular expansion, or square expansion. The injection angle, the number of nozzles, and the shape were chosen based on an experiment carried out in the open wind tunnel by the Cold and Arid Regions Research Institute of the Academy of Sciences [
4]. The distance from the nozzle to the test section was also determined from that experiment.
The average value of the three sand/dust sensors’ transmitted signal is used as the control signal. We used the EMP7-3270 dust concentration online monitor (Australian Plateau Corporation, Sydney, Australia), which is manufactured by the Australian Plateau Corporation (GOYEN). The technical index of the device is shown in
Table 1.
After a blowing sand/dust test, especially the duct test, sand and large dust material will be recycled into the material storage barrel after settlement and separation. However, the suspended dust in the circulating air flow must be cleared otherwise it may impact the ratio of sand and dust in the next test.
2.3. Hardware Design
The main air duct is a reflux type, low speed wind tunnel. The sand/dust recycling system consists of the recovery system, the feeding system, the electric control system, and the fixed supporting and grounding equipment. The concentration of sand/dust is different in the two working conditions, ranging from 0.1–20 g/m3. The concentration of sand/dust is controlled by the rotation of the material valve through the frequency converter. The experiment used the Mitsubishi E500 inverter (Tokyo, Japan). The control of the sand/dust concentration must be carried out under a certain wind speed. The same sand/dust concentration will change at different wind speeds with a constant sand/dust feed amount. This experiment selected the EMP7 smoke emission monitor (Australian Plateau Corporation, Sydney, Australia) for the sand/dust concentration measurement. The dust particles flowing through the probe generate an electric charge that measures the online dust emissions (unit = mg/sec or g/h). Given a constant velocity, the corresponding emission concentration (mg/m3) can be determined accurately as a function of the velocity of the smoke and dust.
This experiment adopts the PID automatic control scheme of negative feedback. The concentration sensor is the measuring element. The console data acquisition and output value comparison is the comparing element. The rotary valve feeder that controls the sand/dust amount is the controlled object. The dust concentration is the controlled variable, and a change of the wind speed is a disturbance of the concentration. As the executive component, the frequency converter motor controls the rotary feed valve.
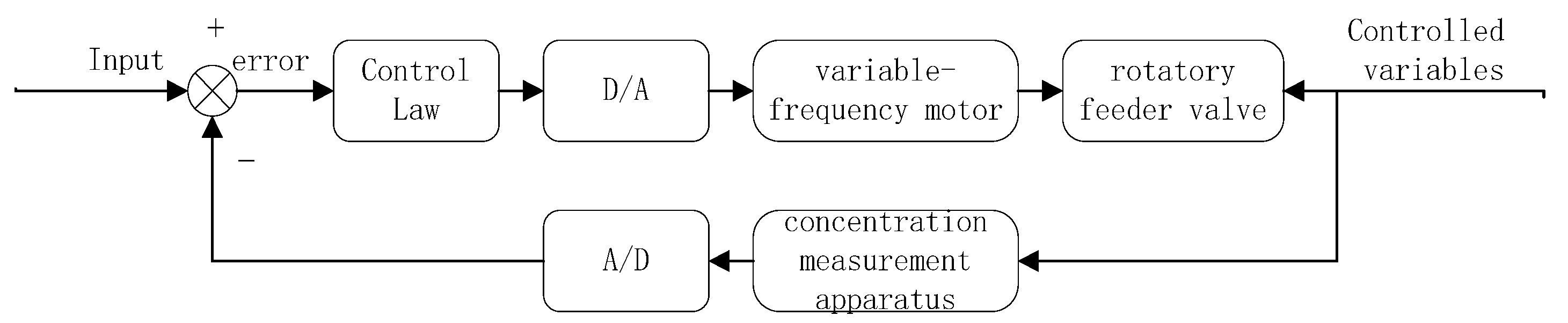
Figure 3 shows the flow chart of the control system.
Figure 4 is the dust concentration feedback control block diagram.
In the feedback control system for the wind speed, the control panel is the comparison component, which collects data through the A/D and outputs an analogue quantity through the D/A. The DC speed control system is the implementation component, the wind speed is the controlled variable, and the wind speed sensor is the measuring element. The main air duct is a low speed closed circuit wind tunnel. The sand/dust recycling system includes the recovery system, the feeding system, the electric control system, and fixed supporting and grounding equipment.
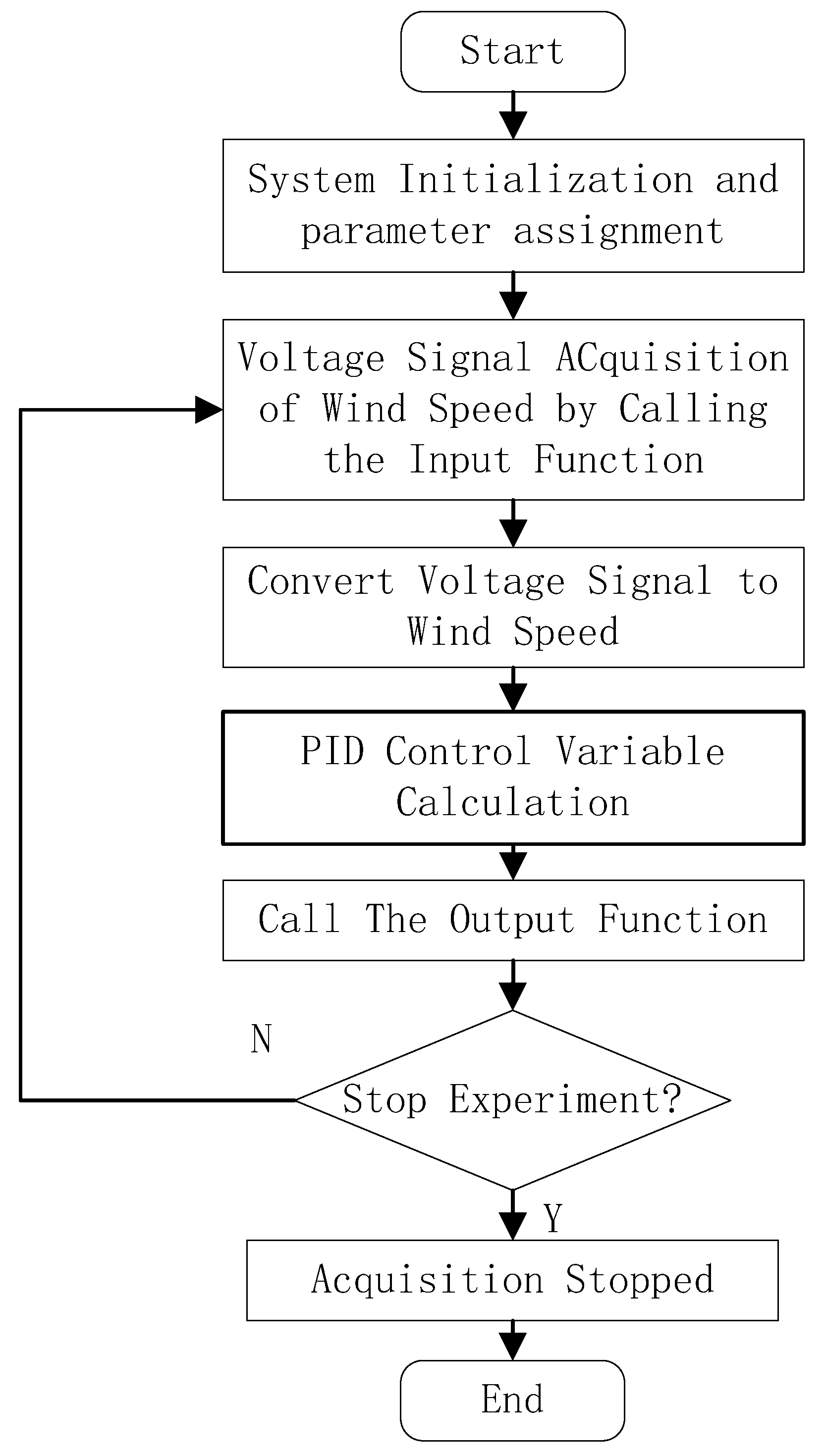
Consider the wind speed parameter as an example. Our experiment involved writing the procedure in the dialog box, adding the hardware drive function, and designing the computer data acquisition and control program—where T is the sampling period in seconds. The flow chart of such a program is shown in
Figure 5.
2.4. PID Control Algorithm
We first introduce the vocabulary of the PID control algorithm [
21]. The algorithm primarily uses the following formulas [
22]:
Next, the program will be implemented according to:
where
is the nth output,
is the sampling bias,
is the integral coefficient,
is the integration time constant,
is the proportional coefficient,
is the differential coefficient,
is the sampling period and
is the differential time constant [
23].
The temperature should be controlled to stay in the range of 20 to 60 °C. The task of temperature control is accomplished by both the temperature control system and the circulating air duct insulation structure. The polyurethane foam plastic insulation layer is 50 mm thick. An external thermal insulation structure is adopted because of the special characteristics of the device. The insulation prevents a large heat scatter into the test hall when the air temperature is higher than the ambient temperature. This reduces the energy consumption of the air conditioner when the air temperature is lower than the ambient temperature. As the equipment works, the main fan and the air conditioner driving power are ultimately converted into heat that can be quite significant. Therefore, to maintain the set temperature, the area must be cooled. In high temperature conditions, especially accompanied by low wind speed, the power driving the fan is reduced, but the heat capacity of the circulating air duct is very large due to the external heat insulation structure. In order to shorten the heating time, an electric heater is also present in the air conditioner box. The heater has another effect, namely, adjusting the temperature precisely; this makes the refrigerator conditions relatively stable and the temperature control precision higher.
The temperature control system is composed of the air conditioning box, the water chilling device, the three way regulating valve of chilled water, the frequency converter for the air conditioner fan and the corresponding equipment for measurement and control. The temperature sensor is installed in front of the feeding nozzle. The temperature controlling components include: the outlet water temperature control of the water chilling unit, the bypass control of the water quantity in the table cooler through the gas (or electric) three way regulating valve QF4, and the frequency conversion speed controlled by the combined air conditioning fan and electric heater control. In order to ensure that the chilling unit and the air conditioner maintain a stable environment and reduce the temperature induced fluctuations in the other systems, it is common to use the first three temperature control methods for the remote control. In this experiment, we set the electric heater in automatic fine adjustment working mode, and positioned the electric air valve at the inlet of the air conditioning box.
Due to the airflow carrying dust entering the air-conditioner, the dust can accumulate in the tube and fin tube of the heat exchanger, which can affect the heat transfer. Therefore, the cooling fin tube and the electric heating fin tube cannot be have the conventional fin tubes spacing; instead, the tubes should be larger and slightly higher than the norm. Accordingly, as the effective heat transfer area decreases and the fouling resistance increases, the total length of the finned tube will increase and the size of the cooling device and the electric heater will be increased. In addition, the pipeline blowing off compressed air should also be appropriately arranged so as to automatically swipe off the dust on the surface of the finned tube by the control program. Temperature measuring points are arranged on the inlet pipe of the cold water surface cooler and the bypass mixing pipe to monitor the temperature change after combining the air from the outlet of the air conditioner, outlet of the main fan, and the main fan.
3. Mathematical Models of Control System
The mathematical model is not only used for simulation. It is also used to adjust the automatic tuning parameters in real experiments. The data collected by the sensors such as temperature and wind speed are fed into the mathematical model and are able to derive the theoretically required adjustment amount, which is then input into the fuzzy-SAE controller.
3.1. The Model of Concentration
The dynamic control equation depends on the change in the sand/dust concentration in the return flow type test environment. The equation is expressed as:
is the volume in the high concentration region between the circulating air duct feeding port and separated section outlet. is the total volume of the other sections. is the flow coefficient of the feeding tube. is the concentration in the test section. is the pressure of the circulating air duct. is the auxiliary flow rate of the circulating air duct. is the separation efficiency of the gas-solid separation device in the air duct. is the cross sectional area of the test wind tunnel. is the wind speed. are the mass mixing ratio, the valve opening of the gas source, and the gas pressure of the sand/dust in feeding tube of pneumatic conveyance system, respectively. is the speed of the rotary feeder. Finally, is the air quality in the duct.
The change in concentration over time can be obtained by the law of conservation of mass.
is the converted volume considering the different concentrations of each component. is the sand/dust quality in the air duct of the pneumatic conveyance system in one unit of time. is the quality of the sand/dust separated in one unit of time. is the sand/dust quality flowing away with the auxiliary air from the circulating air duct in one unit of time. is the concentration of test section.
The mixing ratio of the pneumatic conveyance system changes is described by Formula (7).
is the sand/dust flow into the pneumatic conveyance system by a rotary feeder in one unit of time.
The speed of the rotary feeder
using the classical PID control method can be calculated by the principle of closed-loop control.
The control equation of the valve opening of the pneumatic conveyance system is:
where
are, respectively, the proportion coefficient, the integral coefficient, and the differential coefficient of the rotary feeder speed controller.
and
are, respectively, the measured value and the given value of the sand/dust concentration.
3.2. The Model of Pressure
The dynamic equation of the changing pressure is:
where
is the sand flow factor,
is the moisture transfer factor,
is the leakage factor,
is the pressure regulating factor, and
is the main fan factor.
are, respectively, the pressure and the valve opening of the gas-solid two-phase flow when adding sand. If the speed of the regulating fan is selected to be the control variable, the control equation is:
3.3. The Model of Temperature
The dynamic equation of the temperature variation in the circulating air duct is shown in Formula (12).
is the equivalent metal mass of the circulating air duct. is the ratio of the specific heat. is the temperature of the duct. is the heating power of the electric heater. is the speed of the fan. is the ratio coefficient. is the specific heat of the air flow. is the temperature of the air flowing into the duct.
,
and
are, respectively, the heat dissipation coefficient, the heat dissipation area, and the ambient temperature of the outer surface of the circulating air duct. At this point, the control equation of the cooling water flow is:
is the amount of cooling water.
is the deviation signal between the test temperature and the measured value.
,
and
are, respectively, the proportion coefficient, the integral coefficient, and the differential coefficient of the electric heater. The control equation for the heating power of the electric heater is shown in Formula (14).
is the heating power of the electric heater. are, respectively, the proportion coefficient, the integral coefficient, and the differential coefficient of the electric heater.
5. Simulation
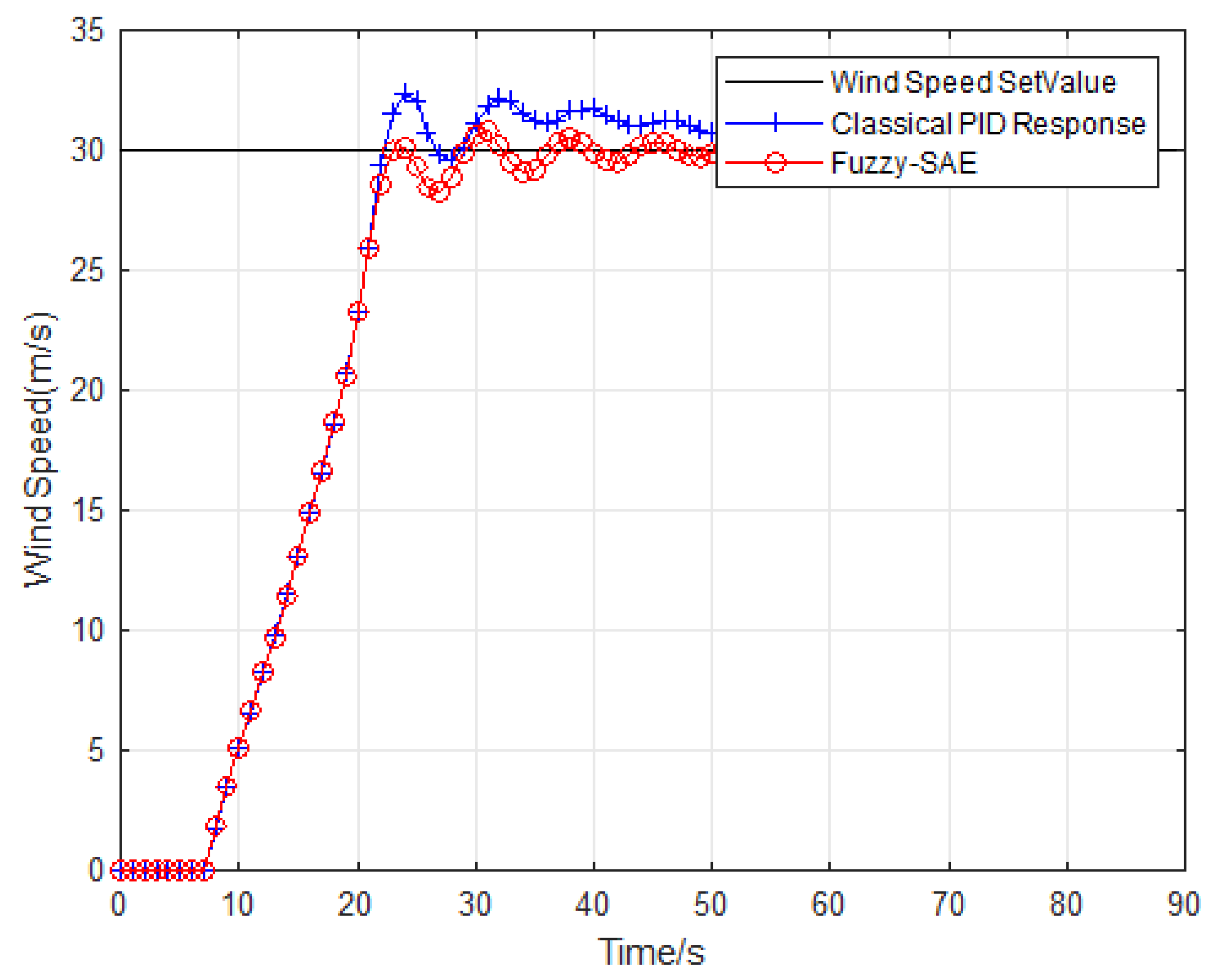
To initially verify the effectiveness of the algorithm, we observe the results of the two algorithms by simulation. Using a wind speed simulation, the fuzzy-SAE algorithm and the classic PID algorithm curve chart is shown in
Figure 9.
In the simulation, the PID parameters are set through several attempts and the corresponding parameters are modified according to the control effect to finally select the best parameters.
By comparing the simulation results, we observe that the response curve of the fuzzy algorithm is smaller and that the fuzzy algorithm achieves the required wind speed control accuracy after the control system reaches the stable state.
The measured data can also prove the above conclusion. Compared with the classic PID algorithm, the fuzzy-SAE algorithm has a better dynamic response curve for the wind speed measured in the D-4 wind tunnel of Beihang University.
As shown in
Figure 9, the X-line is the classic PID algorithm. The straight line is based on the fuzzy-SAE algorithm. The PID parameter can be adjusted online by itself. When the Reynolds number changes, the speed setting value and model attitude angle change too. The fuzzy-SAE algorithm does not need to manually adjust the control parameters.
It can be seen that the wind speed variation is basically the same for both control methods at the beginning, because the algorithm has already controlled the motor to reach the maximum power at this time. However, the fuzzy-SAE quickly results in converged wind speed oscillation when the wind speed approaches the target value.
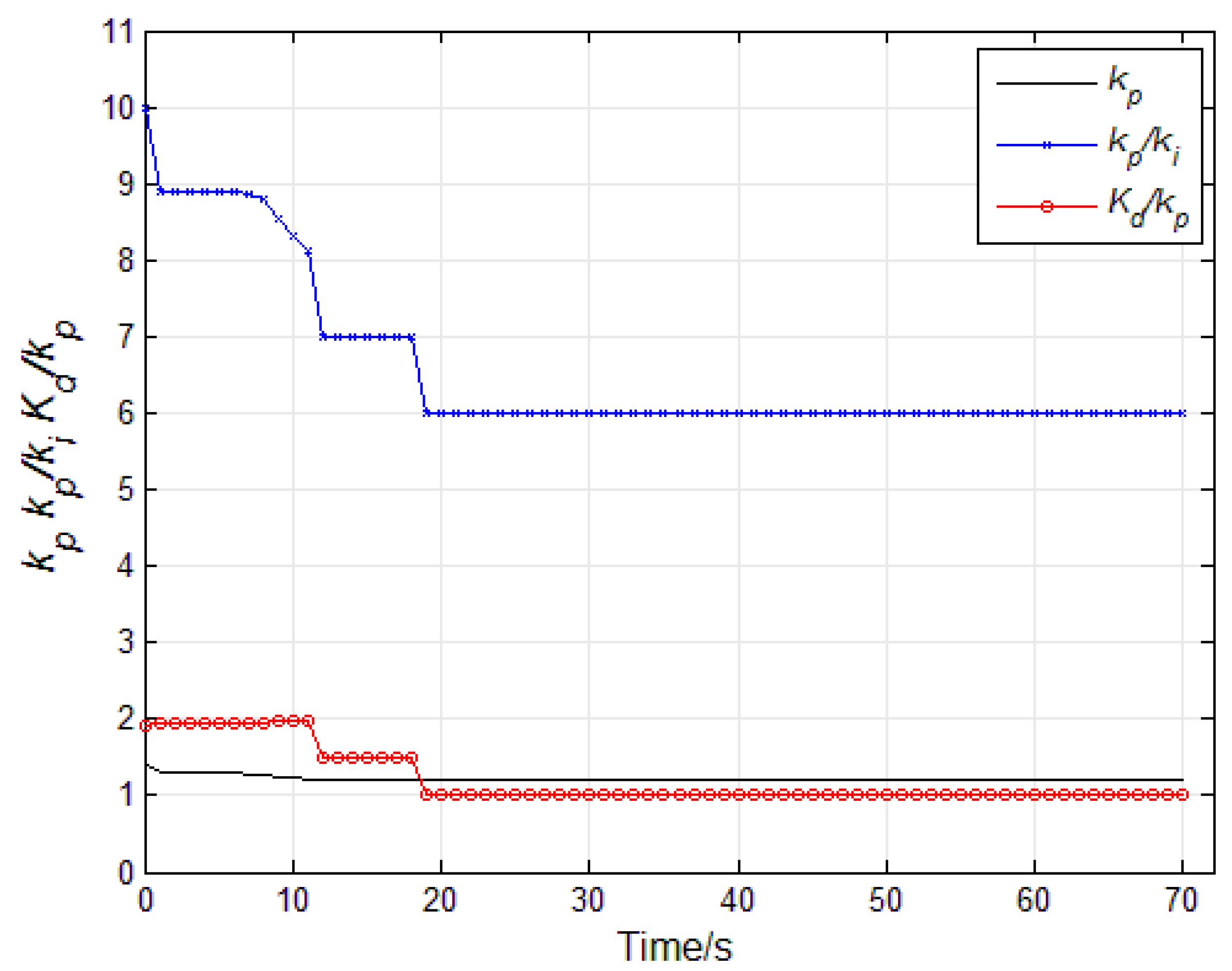
Figure 10 shows the variation of the three parameters Ki, Kp, and Kd. Due to the characteristics of the controller and the instrument itself, the three parameters are different, and Ki < Kp, and Kd > Kp. For better presentation, Kp/Ki and Kd/Kp are used to represent the parameter changes.
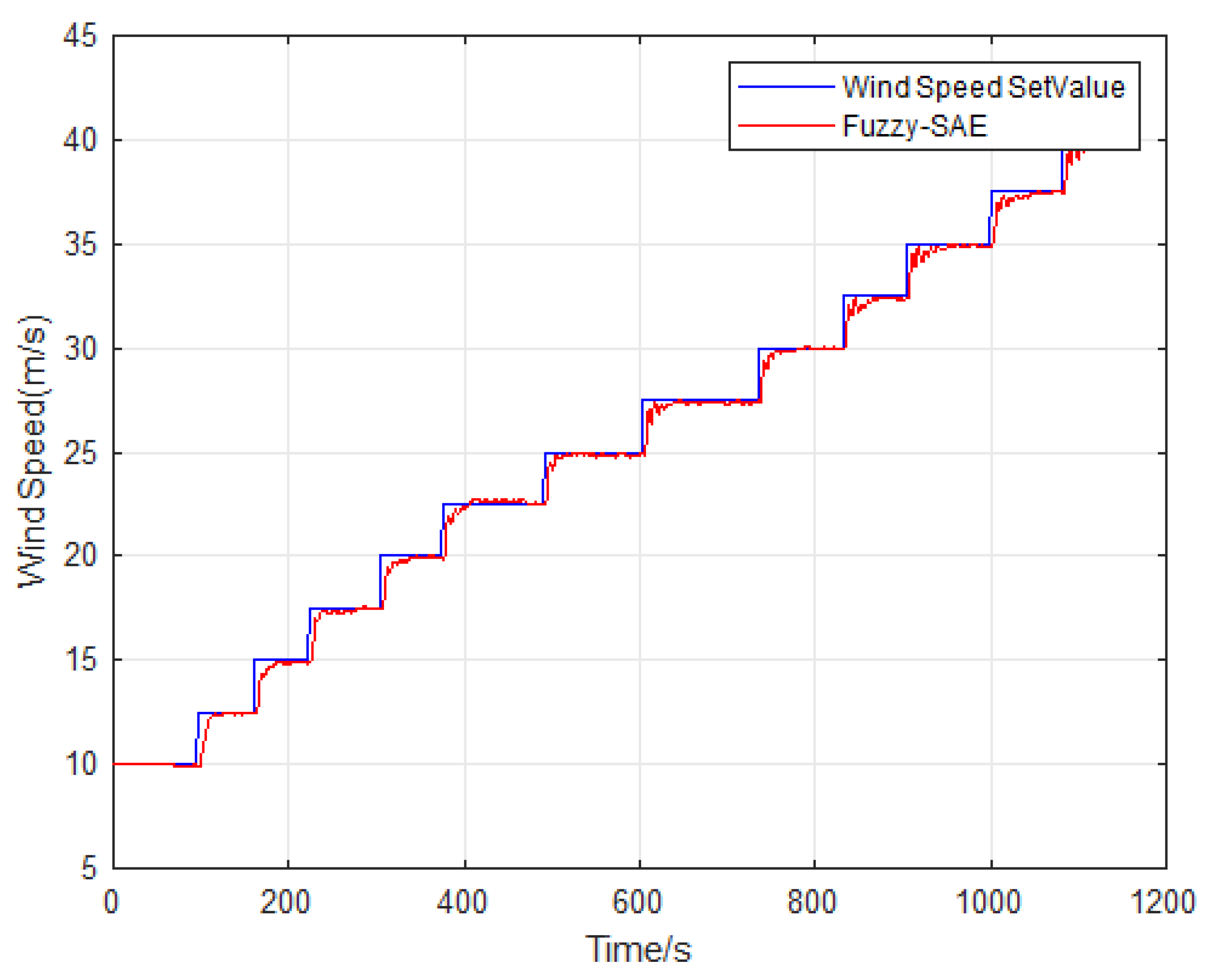
In
Figure 11, the fuzzy-SAE algorithm is also able to adjust quickly without steady-state error or overshoot when the wind speed is changed.
6. Experimental Result
The experimental conditions are shown in
Table 3. The requirements for these experimental environments are derived from the Chinese national standard for helicopter sand/dust testing.
In this test, blowing dust at room temperature lasts for 6 h and at a warm temperature for 6 h. The size of dust particles is less than 149 µm. The sand size is between 180 and 850 µm. All measurements were carried out in the steady state of the wind tunnel.
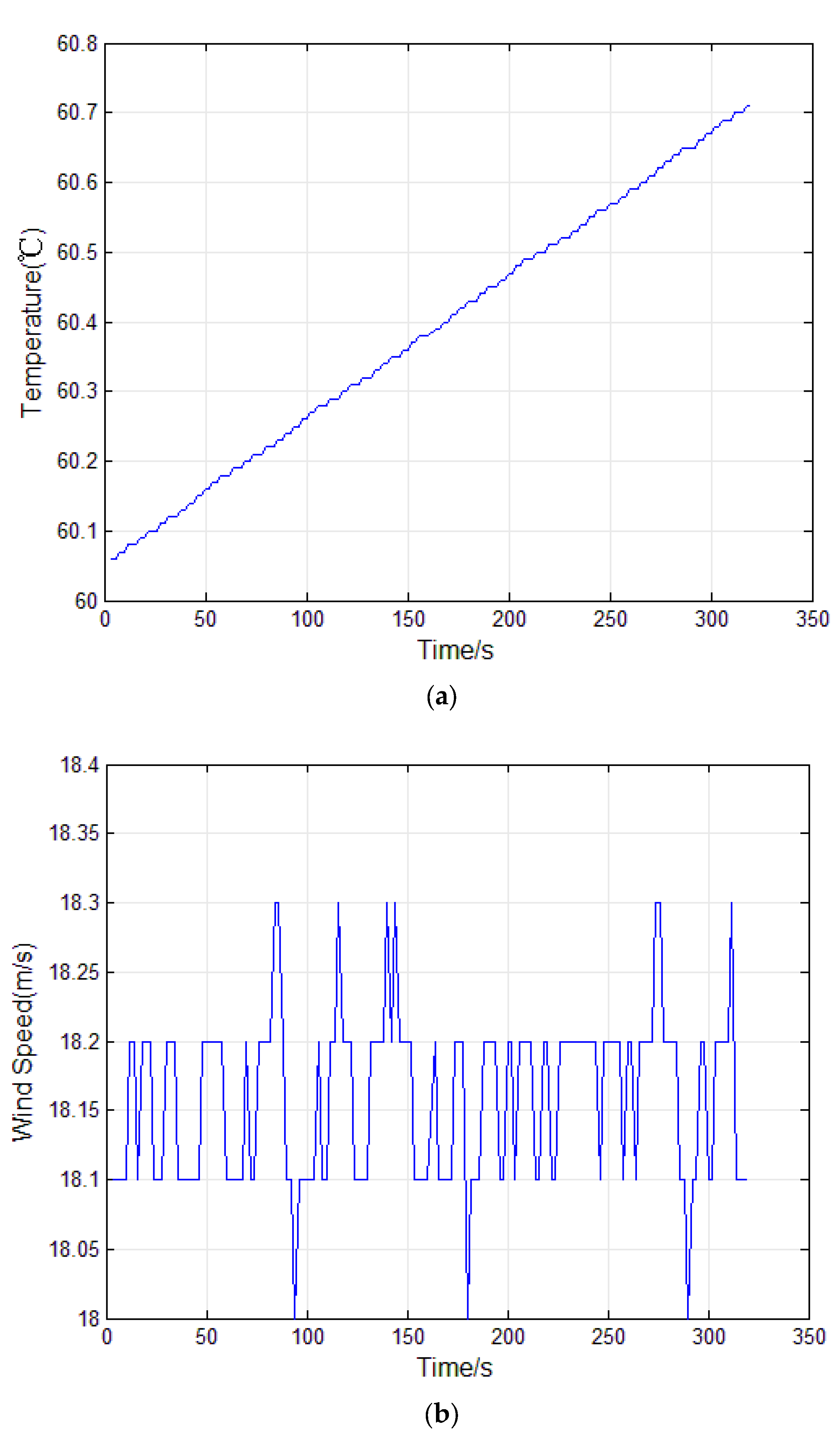
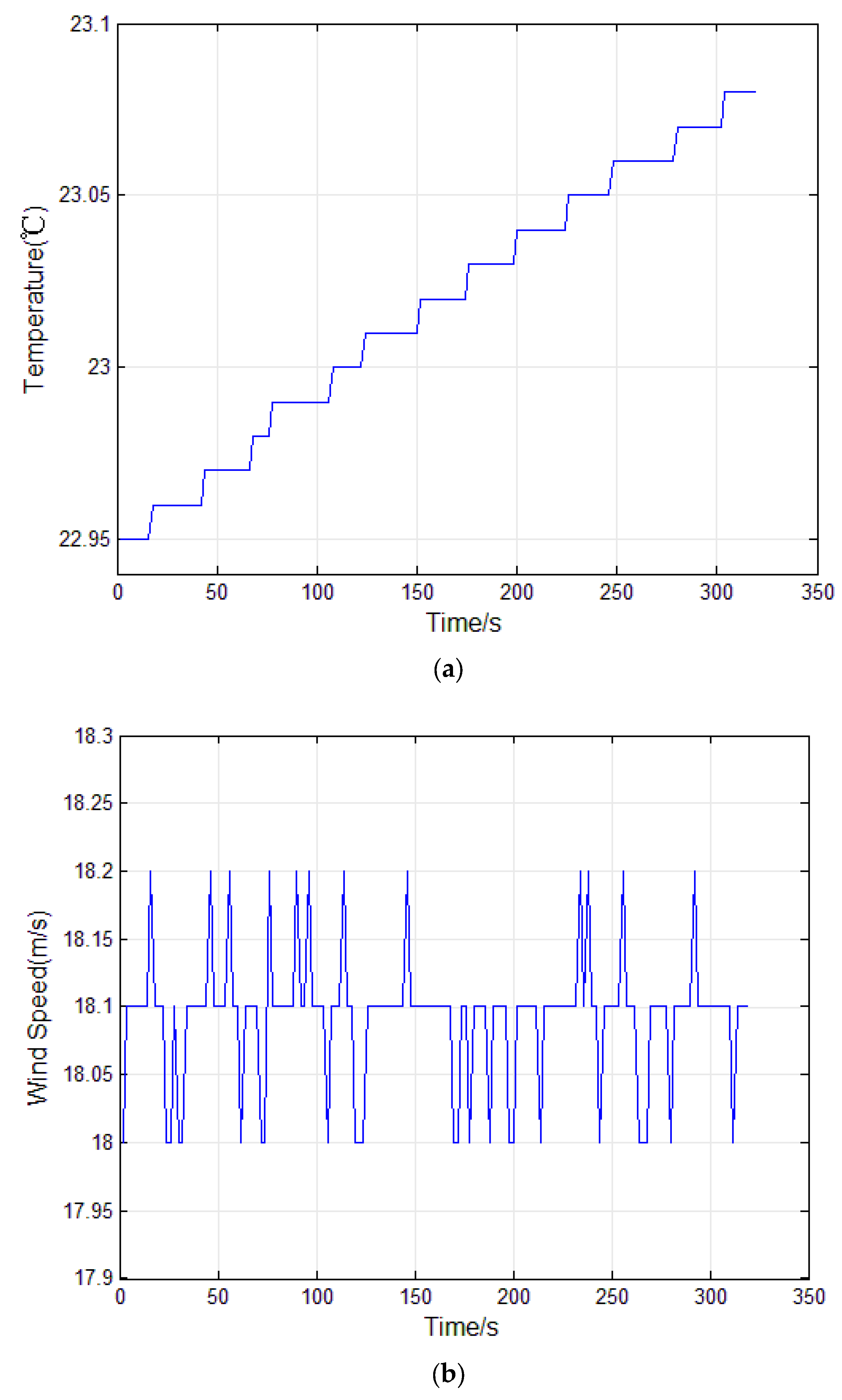
The relevant data from some test sections are as follows. The temperature, wind speed, and concentration meet the requirements of the technical specifications. Low sand concentration data are shown in
Figure 12a–c. Commissioning results of 18 m/s wind speed, high temperature and low sand is shown in
Table 4.
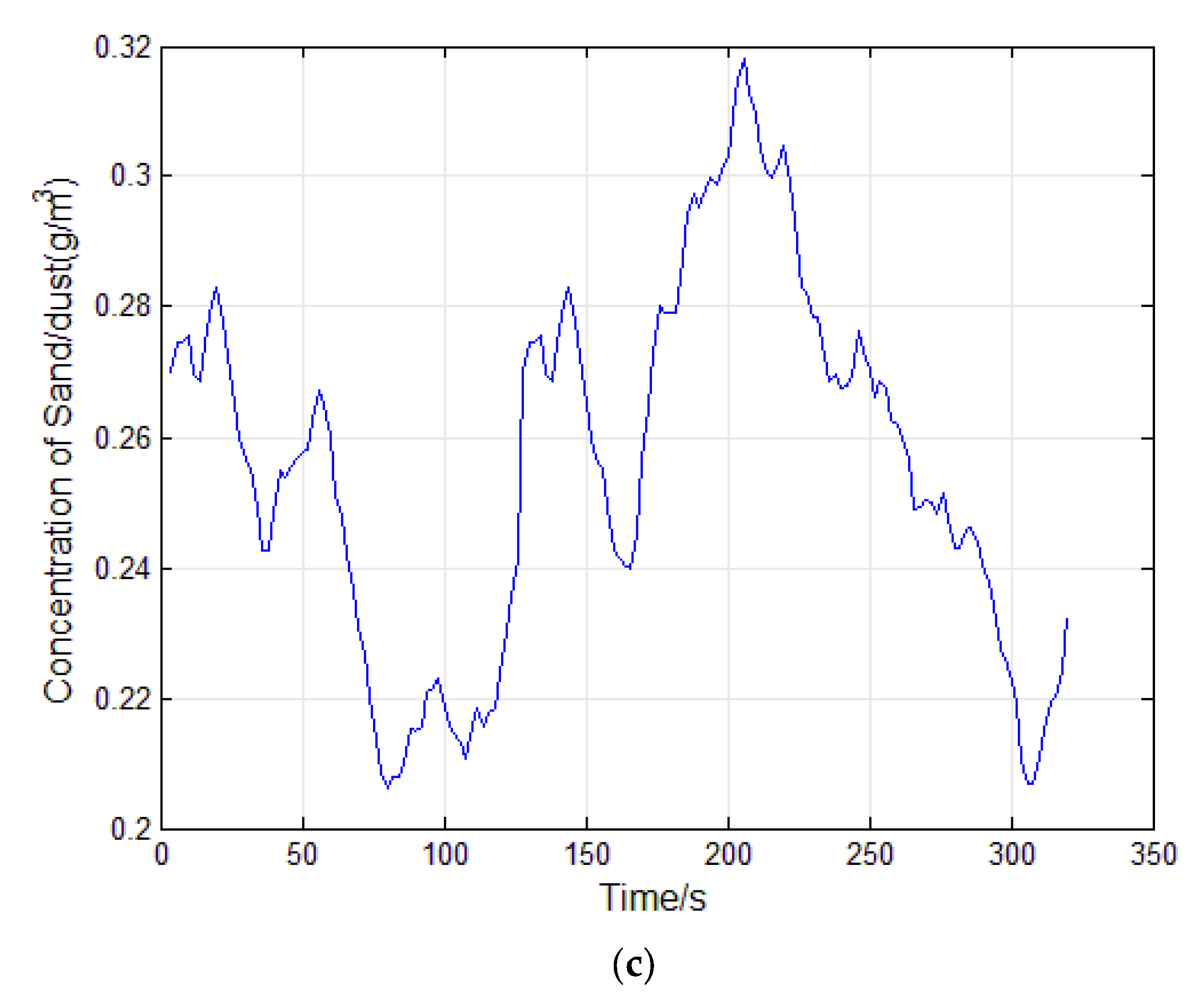
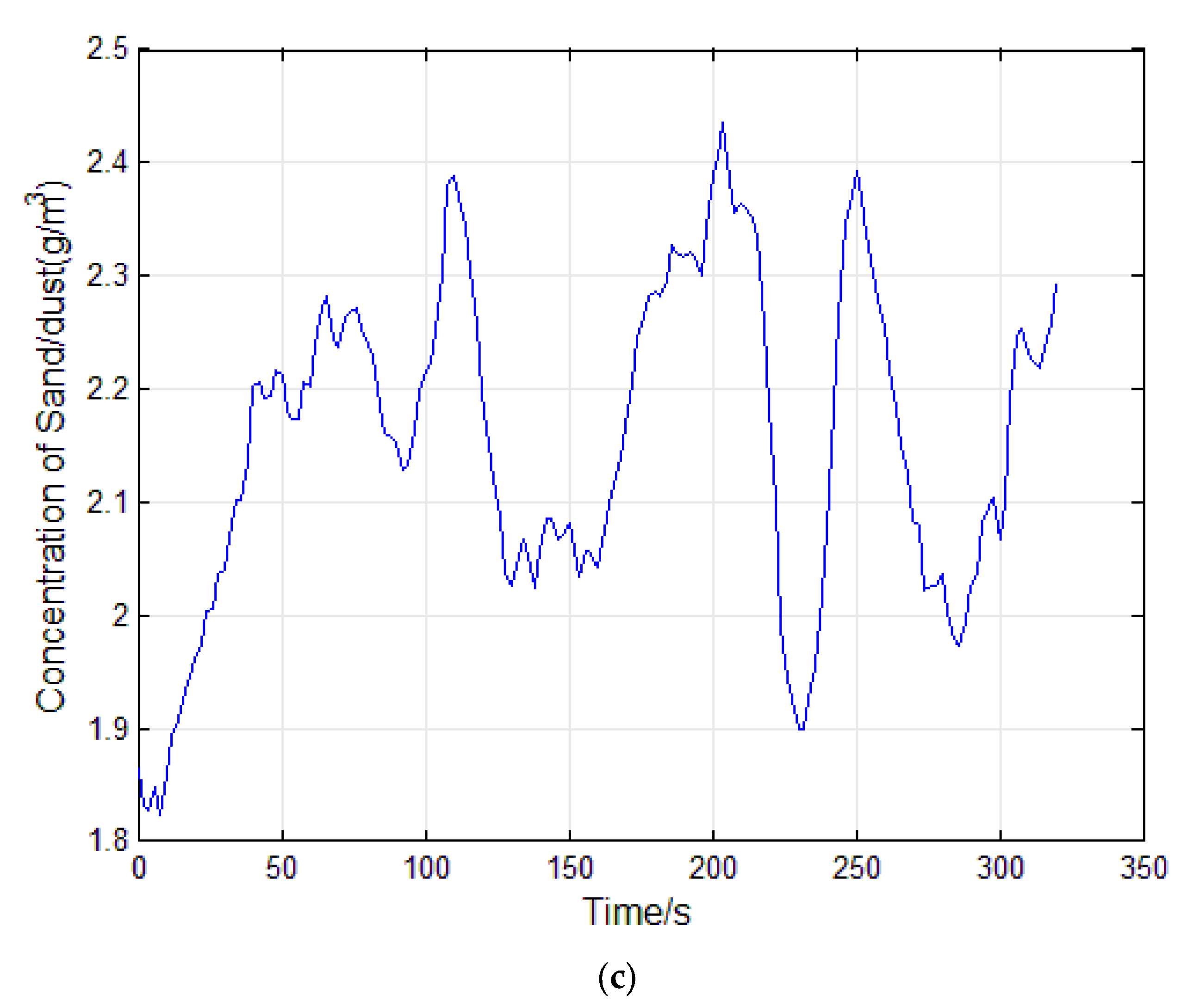
Medium sand concentration data are shown in
Figure 13a–c. Especially in
Figure 13c, fluctuation in the initial phase of the experiment is significant. The concentration is disturbed when suddenly adding sand and dust into the test tunnel and generally four cycles are required to achieve uniform concentration. Commissioning results of 18 m/s wind speed, high temperature and medium sand is shown in
Table 5.
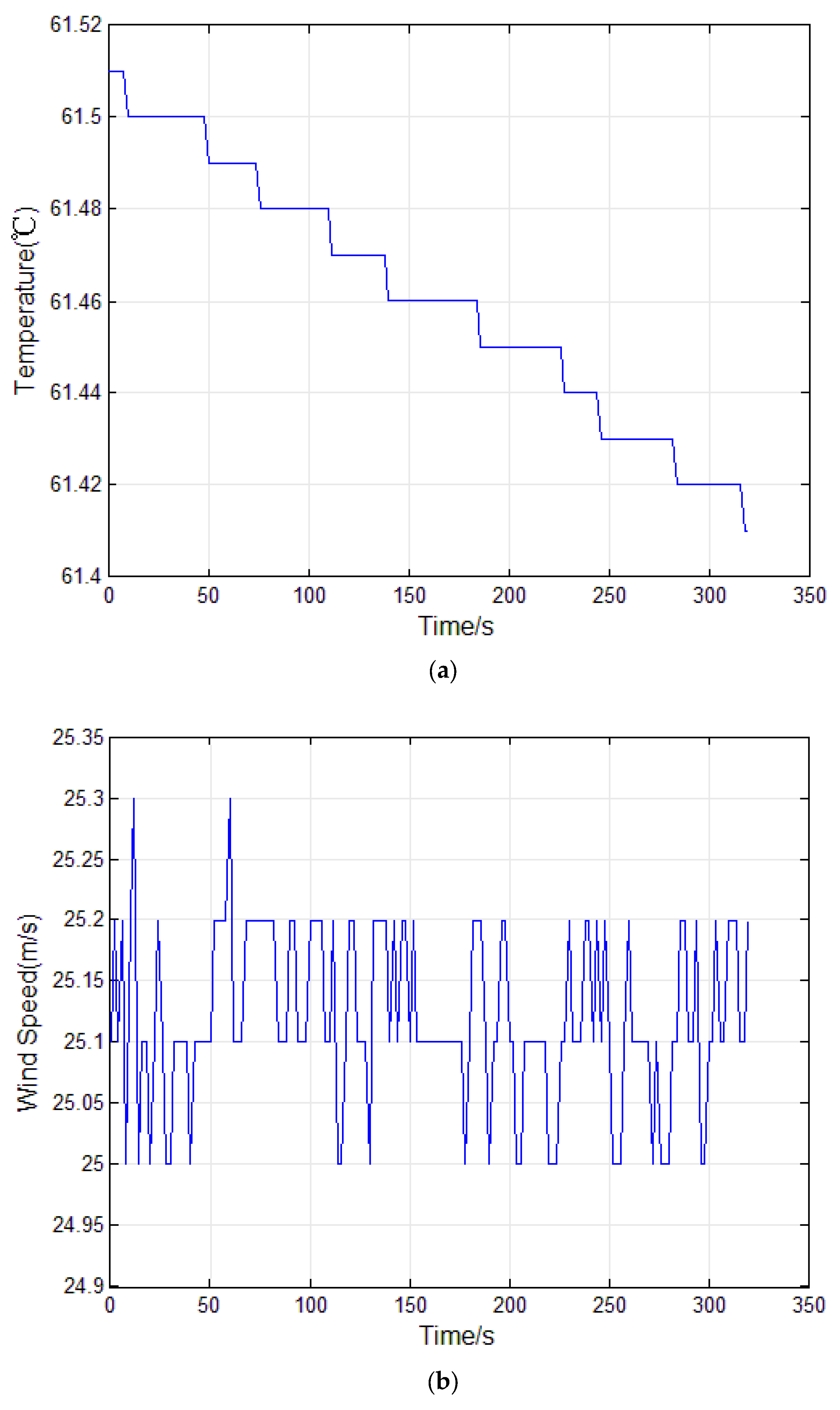
High sand concentration data are shown in
Figure 14a–c.
The fluctuations of temperature and wind speed are very small. Sand/dust concentration is slightly unstable, but still meets the requirements of sand and dust test environment.
By carrying out the tests under three different working conditions, it can be seen that the fuzzy-SAE algorithm can accurately control the temperature, wind speed, and sand/dust concentration, and meets the requirements of helicopter sand/dust experiments.
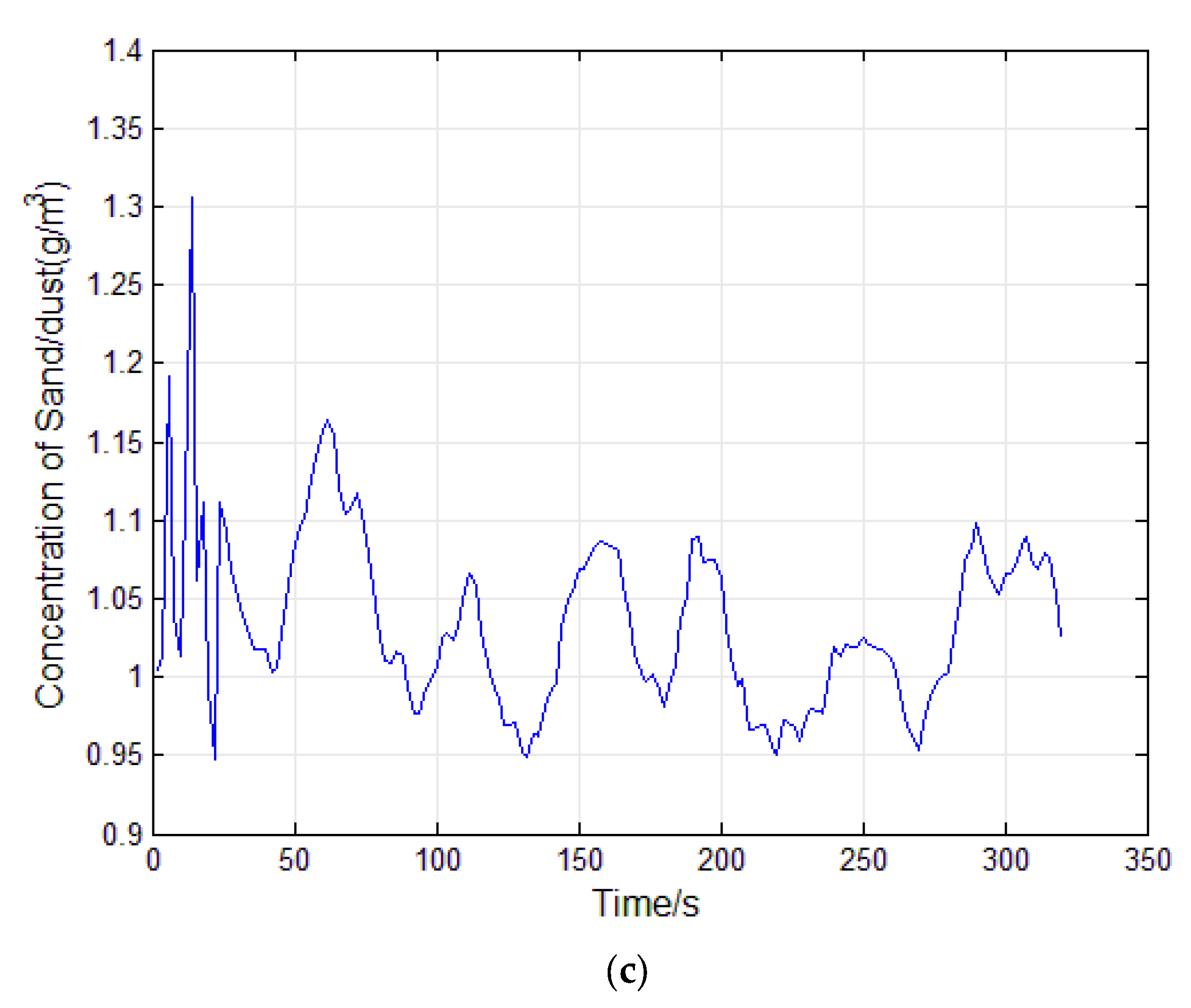
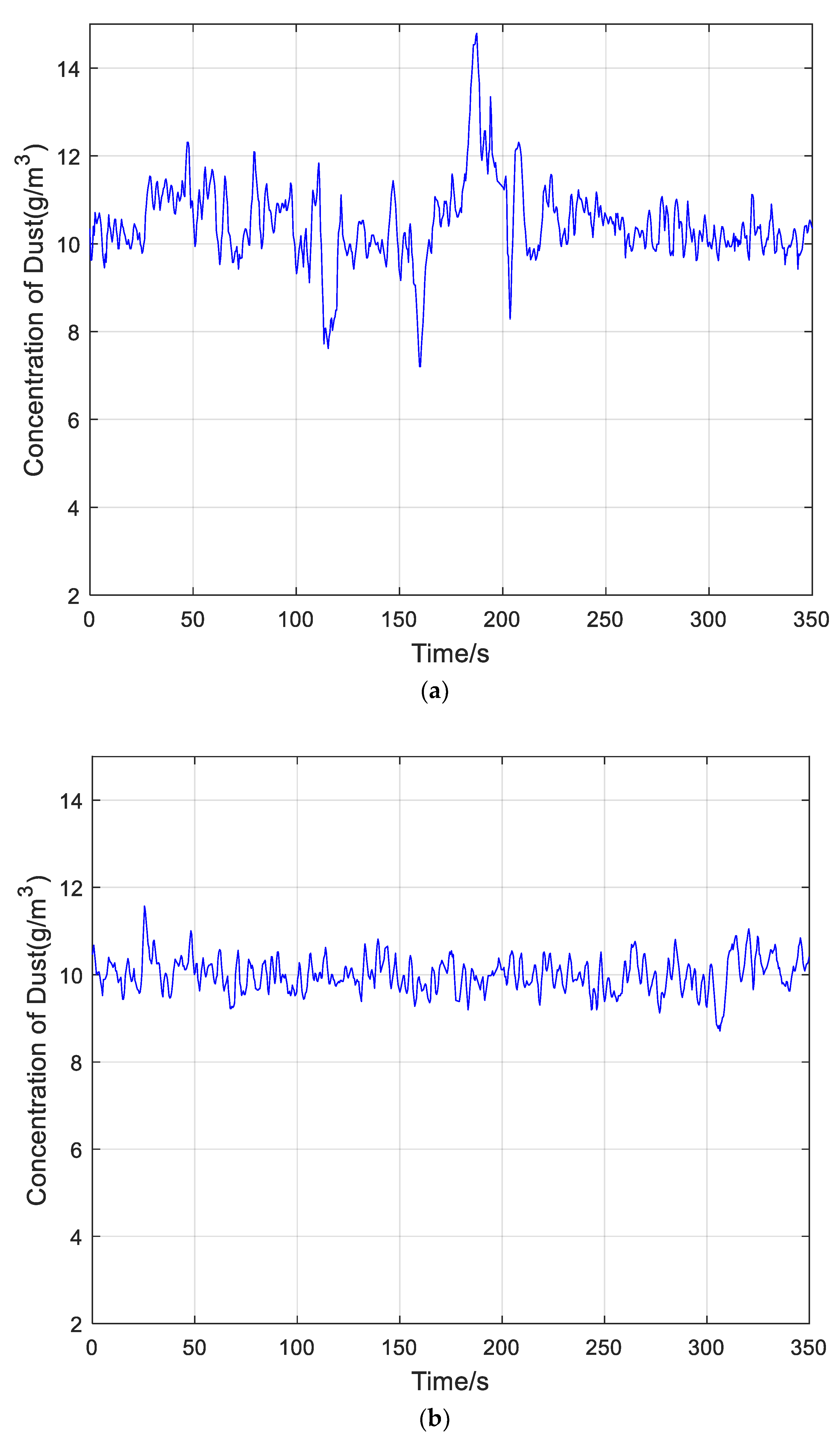
Figure 15 shows the results of the dust blowing experiment. Experiments were conducted using both fuzzy-SAE and PID controllers, at 23 °C and 8.9 m/s wind speed. The parameters of the PID controller were set in the same way as the simulation. Commissioning results of 25 m/s wind speed, high temperature and low sand is shown in
Table 6.
Both algorithms can meet the 10 g ± 7 g requirement. However, it can be seen that the fuzzy-SAE controller has better smoothness, and smaller stability error. This indicates that our proposed fuzzy-SAE algorithm offers a significant improvement over the traditional PID algorithm.
7. Conclusions
A sand/dust environment is one of the most important factors that must be considered in helicopter failure. It is technologically difficult to simulate such an environment by wind tunnel, especially the temperature control, wind speed control, sand/dust concentration, and controlled particle distribution uniformity. The fuzzy intelligent control method and the deep neural network tracking strategy proposed in this paper can control the experimental parameters very well, with a smaller overshoot, faster response speed, no steady error, and a better dynamic response curve compared to the classic PID control. This method better meets the standard technical indicators with regard to the test temperature, wind speed, and sand/dust concentration in the wind tunnel. The fuzzy-SAE intelligent control method not only has the high accuracy of the classic PID control method but also has the high speed, stability, and robustness afforded by fuzzy control, which can meet the intelligent control requirements of the sand/dust environment test equipment. The design and control method has a reference value for the construction of similar sand/dust environmental wind tunnels and lays the experimental foundation for further studies.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}