
Probabilistic Risk Analysis of Aircraft Self-Collisions: A Case Study


Abstract
:1. Introduction
2. Background
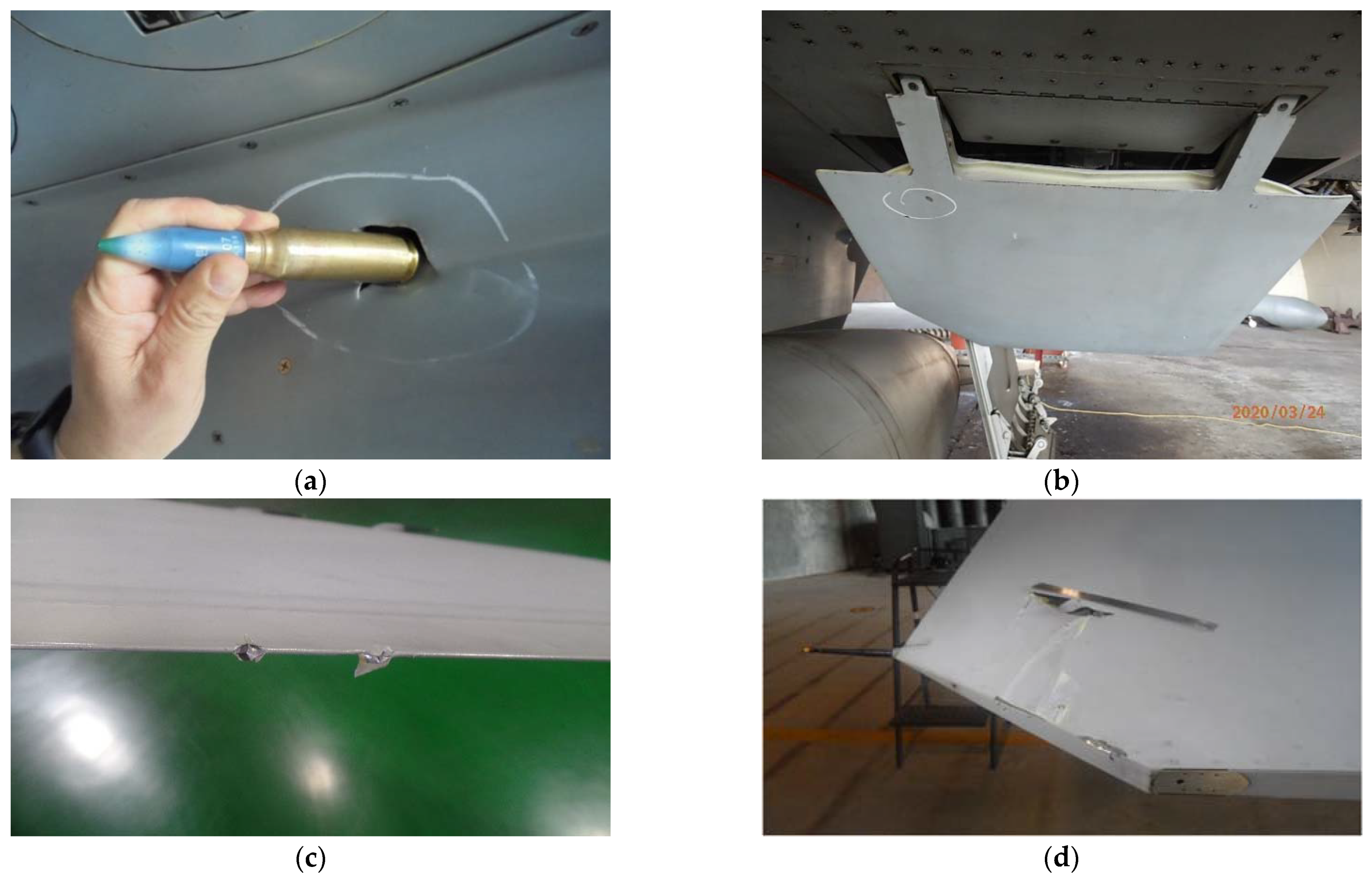
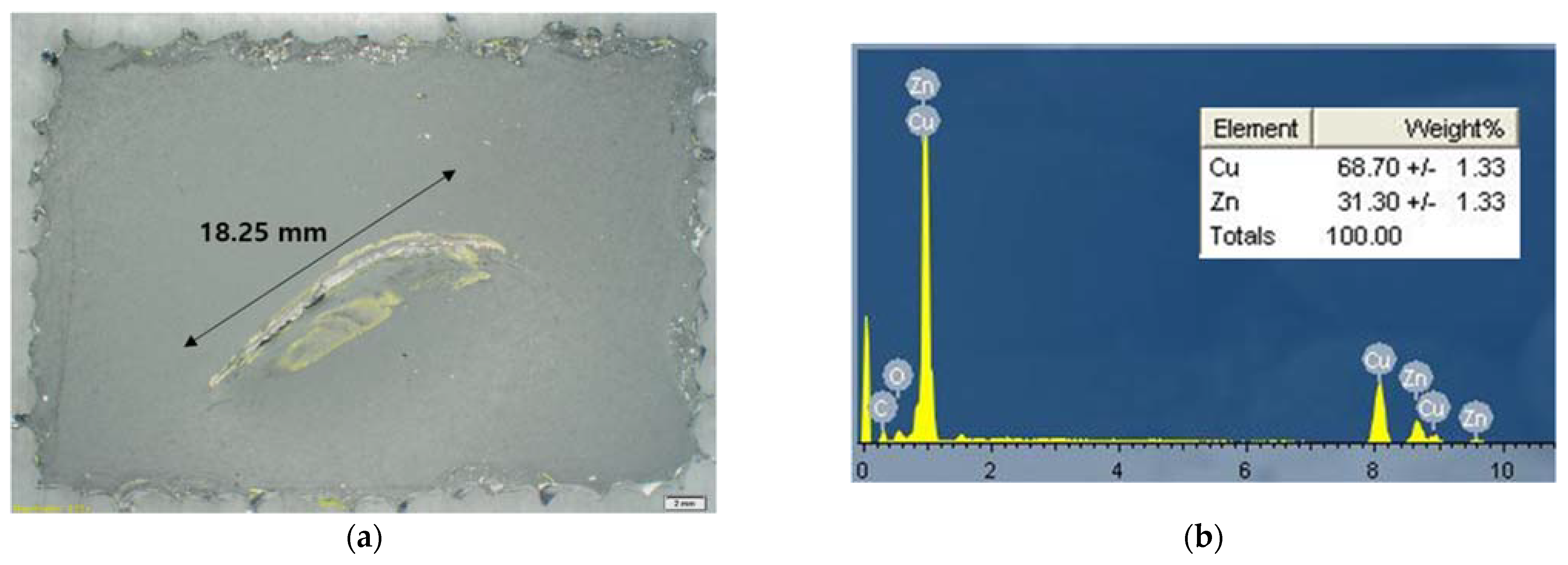
2.1. Self-Collision of Aircrafts with External Stores
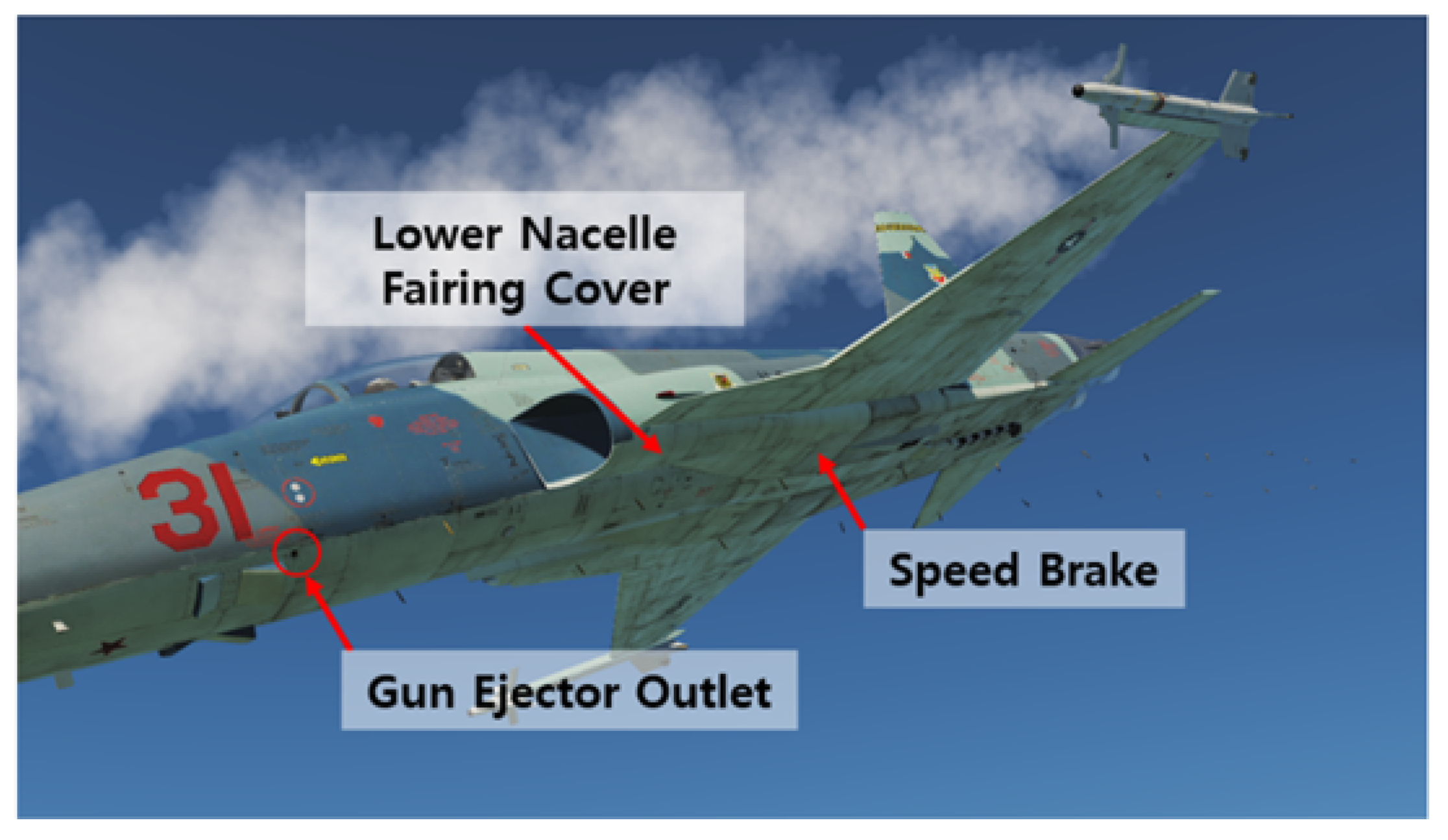
2.2. Target System and Problem Statement
- Forward position of the case ejection port;
- Less favorable air flow pattern around the nose of an F-5F;
- Lower position of the SUU-20 bomb dispenser on an F-5F.
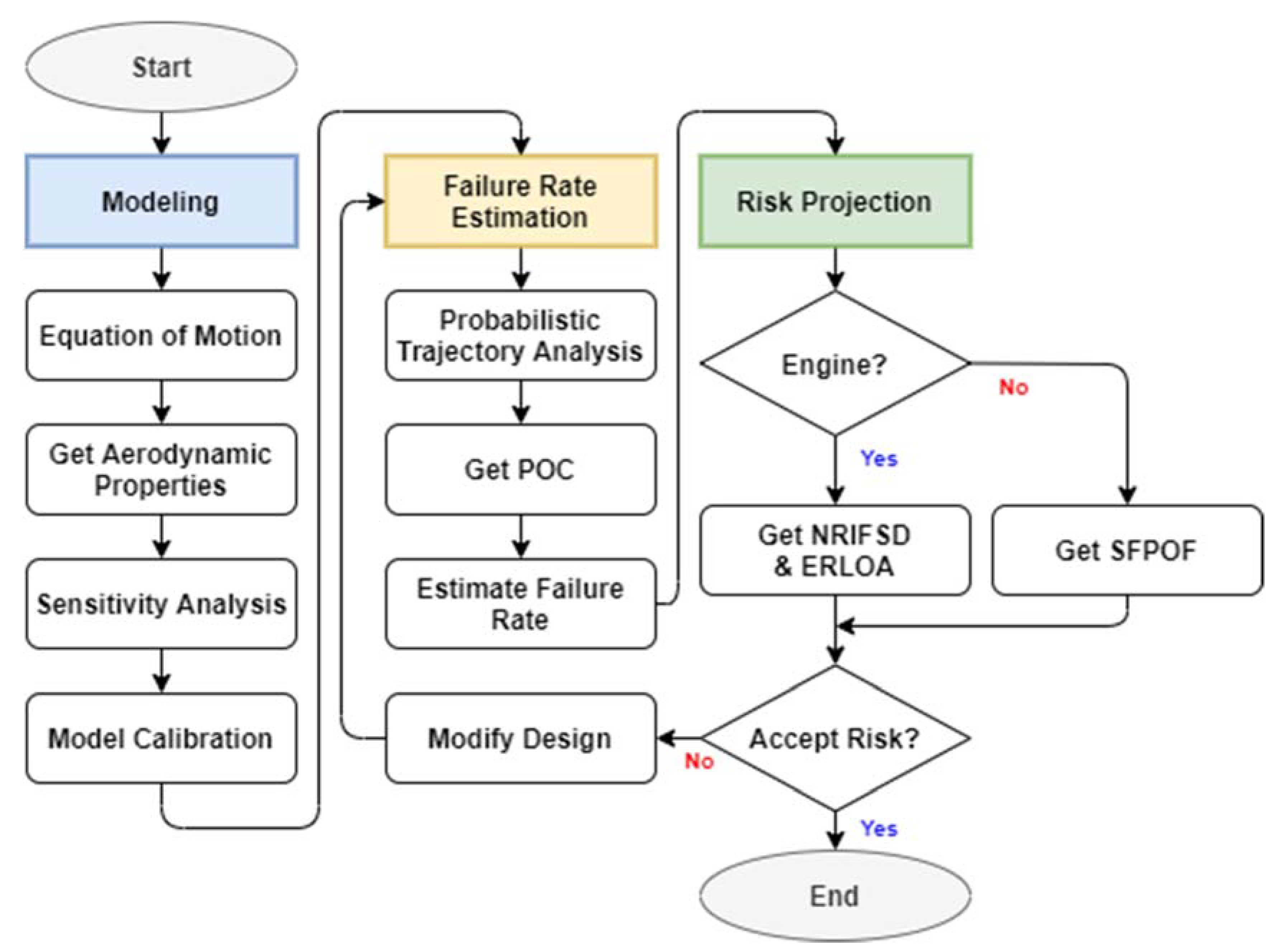
3. Risk Projection Framework
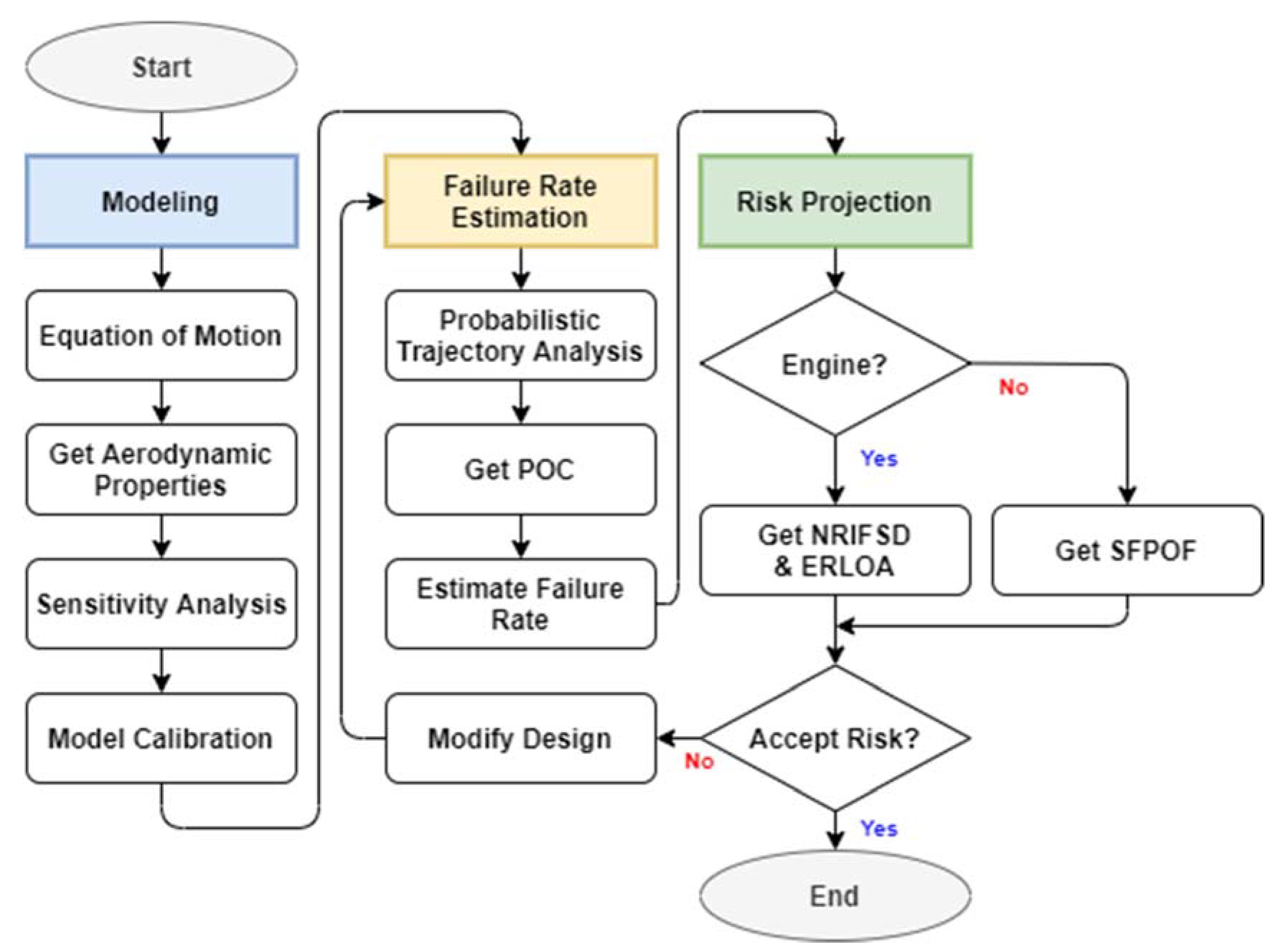
3.1. Overview of Proposed Method
3.2. POC Estimation, Sensitivity Analysis, and Calibration
3.3. Risk Projection
3.4. Risk Indices and Criteria
4. Probabilistic Risk Analysis
4.1. Equation of Motion
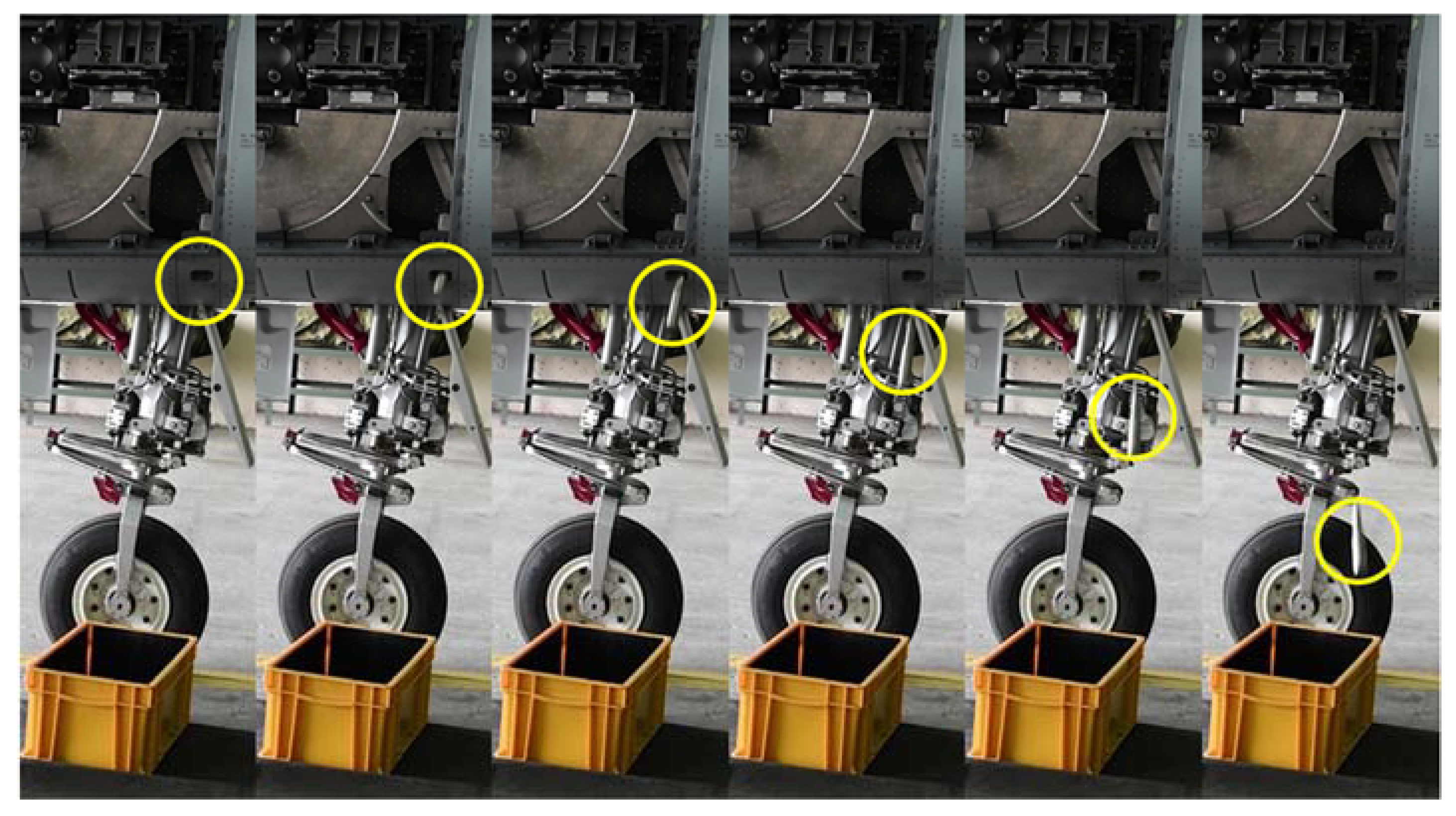
4.2. Case Rotation Model
4.3. Shell Case Drag Coefficient Calculation
4.4. Sensitivity Analysis and Model Calibration
4.5. Trajectories of Shell Cases and POC
4.6. Risk Projection until Aircraft Operation Limit
5. Discussion
5.1. Conservatism of Severity Factors
5.2. Mitigation of POC
- Decreasing the operational velocity of the aircraft during air-to-ground gun firings;
- Increasing the initial velocity of the shell case;
- Storing the shell cases inside the aircraft;
- Removing the adapter to increase the separation between the shell case trajectories and the SUU-20.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mitici, M.; Blom, H.A.P. Mathematical Models for Air Traffic Conflict and Collision Probability Estimation. IEEE Trans. Intell. Transp. Syst. 2019, 20, 1052–1068. [Google Scholar] [CrossRef]
- Wittler, J. TCG-8601-001; Defense Security Cooperation Agency: Washington, DC, USA, 1986; pp. 1–2.
- le May, S.; Gehly, S.; Carter, B.A.; Flegel, S. Space Debris Collision Probability Analysis for Proposed Global Broadband Constellations. Acta Astronaut. 2018, 151, 445–455. [Google Scholar] [CrossRef]
- Barratt, S.T.; Kochenderfer, M.J.; Boyd, S.P. Learning Probabilistic Trajectory Models of Aircraft in Terminal Airspace from Position Data. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3536–3545. [Google Scholar] [CrossRef] [Green Version]
- Chatterji, G.B.; Sridharf, B.; Bilimoria, K.D. En-Route Flight Trajectory Prediction for Conflict Avoidance and Traffic Management. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, San Diego, CA, USA, 29–31 July 1996. [Google Scholar]
- Chatterji, G. Short-Term Trajectory Prediction Methods. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit 9, Portland, OR, USA, 9–11 August 1999. [Google Scholar]
- Warren, A.W.; Ebrahimi, Y.S. Vertical Path Trajectory Prediction for Next Generation ATM. In Proceedings of the 17th DASC, AIAA/IEEE/SAE, Digital Avionics Systems Conference, Proceedings, Bellevue, WA, USA, 31 October–7 November 1998. [Google Scholar]
- Smirnov, N.N. Space Debris Hazard Evaluation and Mitigation; Taylor & Francis, Inc.: New York, NY, USA, 2002. [Google Scholar]
- Patera, R.P. General Method for Calculating Satellite Collision Probability. J. Guid. Control Dyn. 2001, 24, 716–722. [Google Scholar] [CrossRef]
- Seong, J.-D.; Min, C.-O.; Lee, D.-W.; Cho, K.-R.; Kim, H.-D. Analysis of the Collision Probability and Mission Environment for Space Debris. J. Korean Soc. Aeronaut. Sp. Sci. 2010, 38, 1144–1151. [Google Scholar] [CrossRef] [Green Version]
- Akella, M.R.; T, K. Alfriend Probability of Collision Between Space Objects. J. Guid. Control Dyn. 2000, 23, 769–772. [Google Scholar] [CrossRef]
- Yang, L.; Yang, J.H.; Kuchar, J.; Feron, E. A Real-Time Monte Carlo Implementation for Computing Probability of Conflict. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Providence, RI, USA, 16–19 August 2004; pp. 617–636. [Google Scholar]
- van Daalen, C.E.; Jones, T. Fast Conflict Detection Using Probability Flow. Automatica 2009, 45, 1903–1909. [Google Scholar] [CrossRef]
- Chryssanthacopoulos, J.; Kochenderfer, M.; Williams, R. Improved Monte Carlo Sampling for Conflict Probability Estimation. In Proceedings of the 51st AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Orlando, FL, USA, 12–15 April 2010; pp. 1–17. [Google Scholar]
- Lake, J. MiG-27 Bows Out of IAF Service. AINonline, 2 January 2020. [Google Scholar]
- Lutz, L.; Feller, C.; Renegar, A.; Soucek, C. Aircraft Gas Turbine Engine Flight Safety Risk Management Process. In BP-99-06 Rev. E.; U.S. Air Force Life Cycle Management Center: Wright-Patterson AFB, OH, USA, 2016. [Google Scholar]
- U.S. Department of Defense. Aircraft Structures; JSSG-2006; U.S. Department of Defense: Washington, DC, USA, 1998.
- Saltelli, A.; Ratto, M.; Andres, T.; Campolongo, F.; Cariboni, J.; Gatelli, D.; Saisana, M.; Tarantola, S. Global Sensitivity Analysis: The Primer; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Kennedy, M.C.; O’Hagan, A. Bayesian Calibration of Computer Models. J. R. Stat. Soc. Ser. B Stat. Methodol. 2001, 63, 425–464. [Google Scholar] [CrossRef]
- U.S. Department of the Air Force. Propulsion Life Cycle Management for Aerial Vehicles; Air Force Manual 20-116; U.S. Department of the Air Force: Washington DC, USA, 2018.
- Cho, H.; Kwon, H.J.; Lee, D.; Kim, M.S.; Kim, S. Case Study of Risk Assessment for an Aircraft Gas Turbine Engine: Fatigue Cracking of the 1st Stage Turbine Blades of a CT7 Engine Owing to Platform Arch Binding. Trans. Korean Soc. Mech. Eng. A 2020, 44, 887–895. [Google Scholar] [CrossRef]
- Abernethy, R.B. The New Weibull Handbook, 5th ed.; Pratt & Whitney: North Palm Beach, FL, USA, 2004. [Google Scholar]
- Driels, M. Weaponeering: An Introduction, 3rd ed.; American Institute of Aeronautics and Astronautics, Inc.: Washington, DC, USA, 2020. [Google Scholar]
- Arnold, R.J.; Knight, J.B. Weapon Delivery Analysis and Ballistic Flight Testing; AGARD: Seine, France, 1992. [Google Scholar]
- Jo, H.; Lee, S.; Song, C. A Study on the Accuracy Analysis for Air-to-Ground Weapon Delivery. J. Korean Soc. Aeronaut. Sp. Sci. 2007, 35, 741–746. [Google Scholar]
- Massengill, H., Jr. A Technique for Predicting Aircraft Flow-Field Effects upon an Unguided Bomb Ballistic Trajectory and Comparison with Flight Test Results. In Proceedings of the 31st Aerospace Sciences Meeting, Reno, NV, USA, 11–14 January 1993. [Google Scholar]
- McCoy, R.L. Modern Exterior Ballistics; Schiffer Publishing, Ltd.: Atglen, PA, USA, 2012. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Type | Mission | Cause |
|---|---|---|---|
| 1984 | F | Air-to-ground (SUU-20) | Not found |
| 1984 | F | Air-to-ground (SUU-20) | Not found |
| 2002 | F | Air-to-ground (SUU-20) | Not found |
| 2005 | E | Air-to-air | Gun component failure |
| 2011 | E | Air-to-air | Not found |
| 2019 | F | Air-to-ground (SUU-20) | Gun component failure |
| 2020 | F | Air-to-ground (SUU-20) | Current case |
| Factor | Description | Range | Calibrated |
|---|---|---|---|
| v | Aircraft velocity | 400–500 knots | Same |
| θ | Dive angle | 20–30° | Same |
| w | Shell case initial velocity | 25–35 ft/s | 22.5–35 ft/s |
| Δγk | Maximum shell case rotation angle per step | 0–90° | Same |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, D.; Cho, H.; Kim, M.-S.; Kwon, K. Probabilistic Risk Analysis of Aircraft Self-Collisions: A Case Study. Aerospace 2022, 9, 80. https://doi.org/10.3390/aerospace9020080
Lee D, Cho H, Kim M-S, Kwon K. Probabilistic Risk Analysis of Aircraft Self-Collisions: A Case Study. Aerospace. 2022; 9(2):80. https://doi.org/10.3390/aerospace9020080
Chicago/Turabian StyleLee, Dooyoul, Hwanjeong Cho, Min-Saeng Kim, and Kybeom Kwon. 2022. "Probabilistic Risk Analysis of Aircraft Self-Collisions: A Case Study" Aerospace 9, no. 2: 80. https://doi.org/10.3390/aerospace9020080
APA StyleLee, D., Cho, H., Kim, M.-S., & Kwon, K. (2022). Probabilistic Risk Analysis of Aircraft Self-Collisions: A Case Study. Aerospace, 9(2), 80. https://doi.org/10.3390/aerospace9020080