With over 350 nano-satellites set in orbit between 2020 and 2021 [
1], it is evident that nano-satellites are in the front-line of the space industry. Their light weight and the low manufacturing cost allow for technological and scientific principles to be demonstrated in a rapid and effective way. Before achieving challenging tasks such as lunar and Mars landings [
2,
3], using sophisticated control schemes, it is vital to perform tests in ground-based conditions to ensure the success of a space mission which takes place either in micro-gravity or zero-gravity conditions. Simulating the space environment in a laboratory is a complex task. Ground simulations of the attitude control system (ACS), one of the most challenging subsystems of the satellite, are commonly achieved using air bearings because they establish a thin film of air capable of supporting the experimental equipment in a near-frictionless way. Air bearings are usually divided in three main types. Planar air bearings allow only translational movements, while rotational air bearings allow the rotation around at least one of the roll, pitch or yaw axis. On the other hand, the combinational air bearings offer enhanced capabilities by moving the ACS in six or fewer degrees of freedom (DoF). A wide range of air-bearing-based spacecraft simulators has been developed. The most recent of them are manufactured for nano and micro-satellite testing and are presented below.
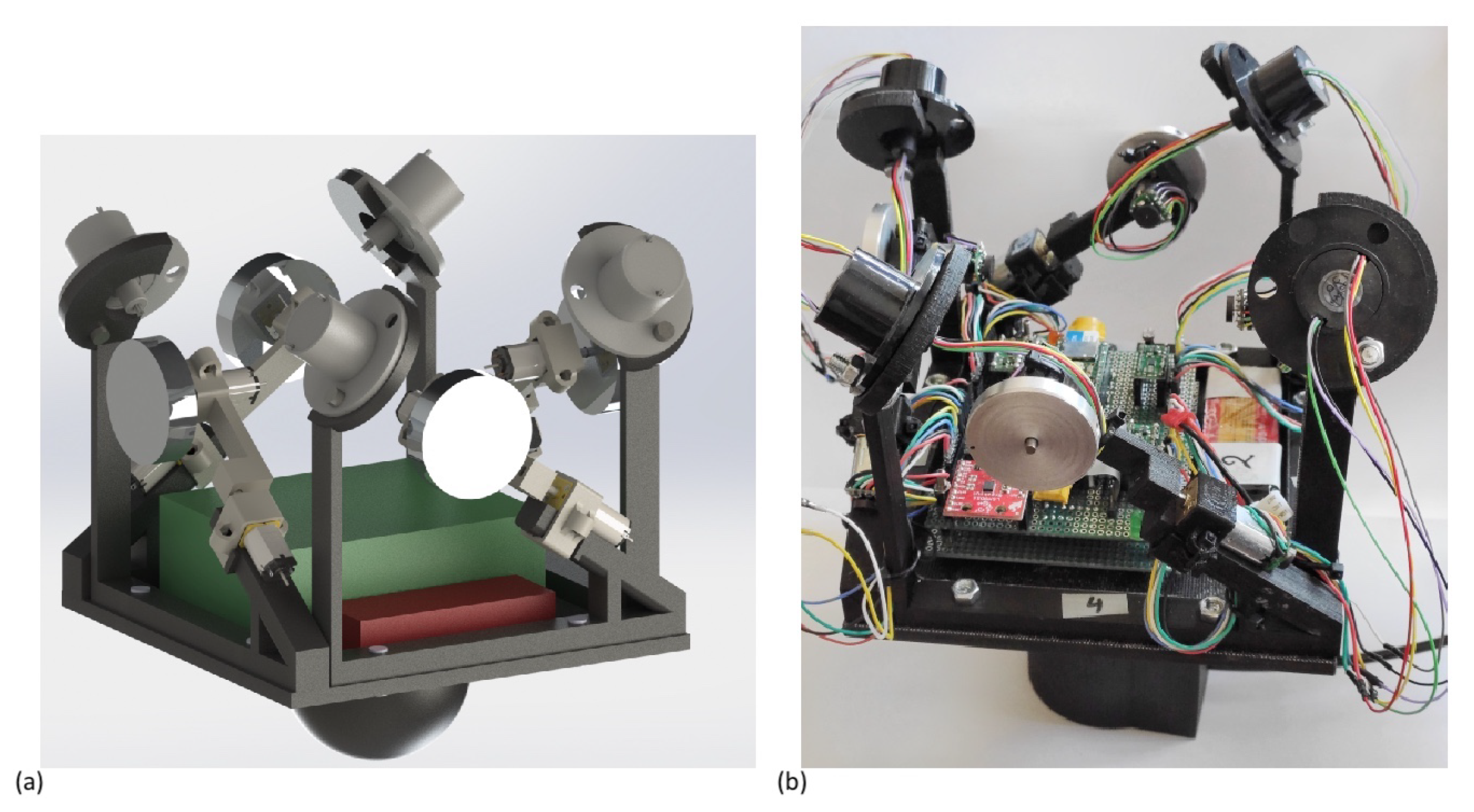
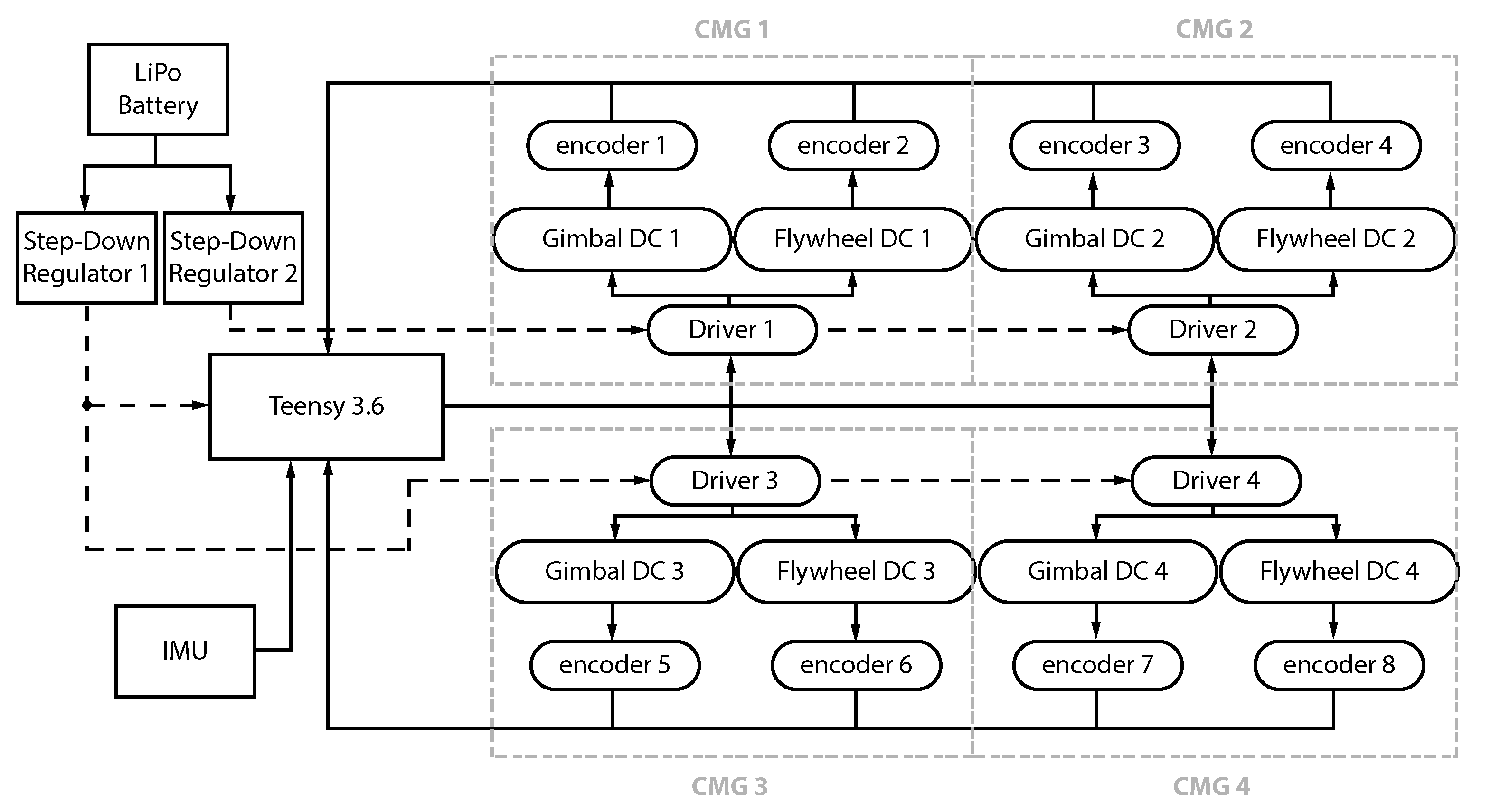
The Space Vehicle Control Group at the University of Surrey has also used a one-DoF air bearing table to demonstrate the benefits of the miniaturization of control moment gyroscopes (CMGs). Four CMGs are used in pyramid configuration controlled by a Siemens 8 bit C515 microcontroller, while an inertial measurement unit (IMU) by Crossbow Technology Inc. is used to measure the angular rate of the platform [
4]. Utilizing all four CMGs for a manoeuvre about the vertical axis, the cluster is capable of rotating the platform with a maximum angular velocity of 8.41 deg/s. Another tabletop-style, hemispherical air bearing is described in [
5]. A circular disk of 30 cm in diameter and thickness of 10 mm is developed for testing the behaviour of nano-satellites, up to 2U CubeSats. The testbed is based on an Arduino Mega 2560 board and it is equipped with a 9-DoF Sparkfun IMU along with three reaction wheels for attitude determination and control. An extremely simple apparatus with cost of less than
$20 made exclusively for educational purposes is presented in [
6]. It consists of an air bearing made by casting polyester resin and a billiard ball that is used for rotational motion and precession demonstrations. The Naval Postgraduate School has also designed an air bearing platform for testing the ACS of the micro-satellite NPSAT1 [
7]. The air bearing allows a maximum tilt angle of 32 deg about the horizontal plane and a 360 deg motion about the vertical axis. The testbed is designed to hold up to 82 kg, requiring approximately 24 psi of air pressure supply. Another attitude simulator, CubeTAS, is developed for nano-satellite testing. It is based on PC-104 form factor and an ARM9 processor [
8]. The bottom part of the air bearing is a hemisphere with diameter of 250 mm and the rotational motion is limited to ±50 deg about the horizontal plane. An IMU and three reaction wheels are used for attitude determination and control, while a Helmholtz cage is installed around the platform to simulate the Earth’s magnetic field. York University has presented another nano-satellite attitude simulator which makes use of a commercial-off-the-shelf (COTS) air bearing designed by Nelson Air [
9]. The testbed is based on a Linuxstamp II, and it is equipped with an ADIS16364 six-DoF IMU and three orthogonally mounted reaction wheels. A cubesat attitude control simulator was developed by the Massachusetts Institute of Technology, based on a tabletop air bearing with diameter of 12.4 cm [
10]. Four flywheels operating either in reaction or momentum wheel mode are used while the ADIS 16365 IMU made by Analog Devices and the three-axial MicroMag3 made by PNI Corporation are the sensors of the system. The platform is controlled by two Arduino Mega boards. Another tabletop-style aerostatic bearing was developed by the Instituto Tecnológico de Aeronáutica of Brazil [
11]. It consists of three-axial gyroscopes and a set of three orthogonally installed reaction wheels that can provide a maximum manoeuvring speed of 0.33 deg/s. An air bearing with a porous carbon surface has been used by the Aerospace Engineering Department of the United States Naval Academy [
12] for micro-satellite testing. The tests include a 11.3 kg platform, based on an Arduino processor, an Adafruit 9-DoF IMU for attitude determination and a set of four reaction wheels for controlling orientation of the platform. The simulator and the actuators are designed to follow the requirement of a desired agility of 4 deg/s. Another air bearing in tabletop configuration that makes use of four reaction wheels and an AHRS sensor has been developed by the Department of Mechanical Engineering of University of Isfahan for testing of a 40 kg platform [
13]. An attitude control testbed for cubesats was built by the Virginia Polytechnic Institute and State University using COTS components [
14]. A tabletop-style air bearing manufactured by Space Electronics Inc. is used and the platform is controlled by a Beaglebone Black—Rev C board. The VN-100 IMU/AHRS by VectorNav, which embeds a three-axial magnetometer, accelerometer and gyroscope along with a barometric pressure sensor, determines the attitude of the testbed. No actuators for attitude control are present on the simulator. A cubesat and nano-satellite simulator is presented in [
15]. A PLA 3D-printed sphere encloses three reaction wheels, two perpendicular magnetorquers, an EZ-COMPASS-4 and a Sparkfun MPU-9150 for attitude control and determination. Both sensors and actuators are controlled by a Raspberry PI 2 Model B board. Three distinct experiments were performed, each one for every axis demonstrating a maximum angular velocity of less than 2 deg/s. The Laboratory of Application and Innovation in Aerospace Science of the University of Brasília has manufactured a nano-satellite attitude simulator that consists of a custom made tabletop air bearing that limits the motion to ±45 deg about the horizontal plane [
16]. An ATMEGA8 is the main computer of the testbed, an ADIS16400 IMU controls determines its orientation and there are no actuators on the platform for attitude control. Another attitude simulator for testing nano-satellite missions in low Earth orbit is presented in [
17]. The facility is capable of simulating both the light coming from the Sun and the Earth’s magnetic field through COTS LED Studio and Helmholtz cage. The tabletop-style air bearing used was made by Serviciencia and the platform is based on an Arduino Due board. The platform is equipped with magnetometer and a monochromatic CMOS camera that is used as a sun sensor while a custom monocular metrology vision system is also implemented for ground-truth attitude determination. With a total cost of less than 20,000 euros, the attitude simulator does not embed any actuators for attitude control. A 3D-printed air bearing has been manufactured by Aalto University [
18]. The air bearing is made of PLA and two hollow hemispheres that connect through latching pieces form a full sphere that consists the rotor of the system. Directional air nozzles compensate for the disturbances produced by fabrication imperfections. A visual tracking system based on OpenCV library is used to perform torque measurements by calculating the angular velocity of the rotor through fixed markings on it.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}